Реферат: Анализ случайных процессов в линейных системах радиоэлектронных следящих систем
БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
Кафедра РТС
РЕФЕРАТ
На тему:
"Анализ случайных процессов в линейных системах радиоэлектронных следящих систем"
МИНСК, 2008
Определение статистических характеристик случайных процессов в линейных системах
Задающее воздействие ![]() и внутренние возмущения
(флуктуации частоты, фазы, задержки) являются случайными процессами с нормальным
законом распределения, который не изменяется при прохождении процессов через
линейные цепи. Флюктуационная составляющая напряжения на выходе дискриминатора
и внутренние возмущения
(флуктуации частоты, фазы, задержки) являются случайными процессами с нормальным
законом распределения, который не изменяется при прохождении процессов через
линейные цепи. Флюктуационная составляющая напряжения на выходе дискриминатора ![]() (t) также процесс случайный, и хотя не всегда имеет нормальный
закон распределения, но при прохождении через последующие узкополосные линейные
цепи нормализуется.
(t) также процесс случайный, и хотя не всегда имеет нормальный
закон распределения, но при прохождении через последующие узкополосные линейные
цепи нормализуется.
Случайный процесс с нормальным законом распределения определяется математическим ожиданием и корреляционной функцией. Методы определения математического ожидания рассмотрены в предыдущем разделе. Рассмотрим методы определения корреляционной функции и связанной с ней дисперсией случайных процессов.
Спектральная плотность процесса на выходе и входе линейной системы связаны зависимостью
![]() ,
,
где ![]() - частотная передаточная функция
системы;
- частотная передаточная функция
системы;
![]() - спектральная плотность процесса
на входе.
- спектральная плотность процесса
на входе.
Преобразовав по Фурье правую и левую часть можно определить корреляционную функцию:
 .
.
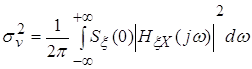
Дисперсия случайного процесса на выходе линейной системы:
 (1)
(1)
или:
 , (2)
, (2)
где Sv(w) –двусторонняя спектральная плотность процесса на выходе системы.
При использовании односторонней спектральной плотности N(f) выражение (2) может быть записано в виде:
 ,
,
где ![]() ;
; ![]() .
.
Расчет дисперсии случайного процесса с помощью стандартных интегралов
Для упрощения вычисления интеграла (6.1) его приводят к стандартному виду:
 ,
,
где ![]() ─ полином четной степени частоты
─ полином четной степени частоты![]() ;
;
![]() - полином, корни которого
принадлежат верхней полуплоскости комплексной переменной
- полином, корни которого
принадлежат верхней полуплоскости комплексной переменной![]() ; n
– степень полинома
; n
– степень полинома![]() .
.
Вычисление производят по формулам:
 ;
;  ;
;  .
.
При n>3 формулы для расчетов можно найти в справочнике.
Условие применения стандартных интегралов: полином под
интегралом должен быть дробно-рациональной функцией переменной![]() и система должна быть
устойчивой.
и система должна быть
устойчивой.
Рассмотрим пример расчета дисперсии ошибки слежения в системе, представленной структурной схемой (рис.1).
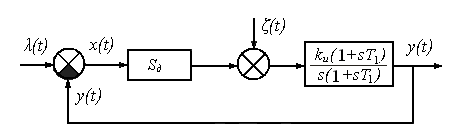
Рис.1. К примеру расчета дисперсии ошибки слежения.
Исходные данные:
![]() ─ флюктуационная
составляющая, определяемая спектральной плотностью
─ флюктуационная
составляющая, определяемая спектральной плотностью ![]() .
.
Рассчитаем дисперсию ошибки слежения по формуле дисперсию по формуле:
 .
.
Передаточная функция от воздействия к ошибке
 ;
;
 ;
; ![]() .
.
Выполним расчет:
![]() ;
;
 ;
;
![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;
 . (3)
. (3)
Приведем ![]() ко входу дискриминатора и упростим
выражение (3)
ко входу дискриминатора и упростим
выражение (3)
 , (4)
, (4)
где ![]() ;
; ![]() - спектр приведенного ко входу
дискриминатора случайного процесса.
- спектр приведенного ко входу
дискриминатора случайного процесса.
Таким образом, дисперсия ошибки слежения пропорциональна коэффициенту усиления разомкнутого контура следящей системы и спектральной плотности флюктуационной составляющей.
Если вместо пропорционально-интегрирующего фильтра
использовать интегратор, то: ![]() , и
, и
 ;
;
Если на вход инерционного звена с передаточной функцией
подать шум со спектральной плотностью ![]() , то дисперсия на выходе
будет равна
, то дисперсия на выходе
будет равна
 ;
;
Таким образом шум вызывает одинаковый эффект на выходе
инерционной цепи и в следящих системах, содержащих одно интегрирующее звено с
добротностью, обратной постоянной времени ![]() .
.
Если следящая система содержит в качестве фильтра последовательное соединение инерционного звена и интегратора, то в этом случае
![]() ;
; ![]() ;
; ![]() ; .
; .
Следовательно, постоянная времени инерционного звена не
влияет на величину флюктуационной ошибки (дисперсию). Это объясняется тем, что
при увеличении ![]() инерционного звена сужается
полоса системы, но одновременно увеличивается максимум АЧХ, а площади под
кривыми не изменяются (рис.2).
инерционного звена сужается
полоса системы, но одновременно увеличивается максимум АЧХ, а площади под
кривыми не изменяются (рис.2).
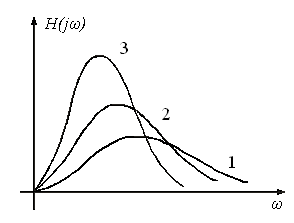
Рис.2. Зависимость АЧХ от постоянной времени инерционного звена.
Используя (4) можно оптимизировать параметры системы, в
частности ![]() по
критерию минимума флюктуационной ошибки. С этой целью продифференцируем (6.4) по
по
критерию минимума флюктуационной ошибки. С этой целью продифференцируем (6.4) по
![]() и
приравняем производную нулю.
и
приравняем производную нулю.

 ;
;
![]() ;
;
![]() ;
;
![]() ;
;  ;
;
при 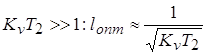 ;
;  ;
;
Подставив ![]() в (4), получим
в (4), получим
 ,
,
где ![]() - собственная частота следящей
системы.
- собственная частота следящей
системы.
Если задающее воздействие представлено спектральной плотностью неточность его воспроизведения также оценивается дисперсией. Рассмотрим пример (рис.3).
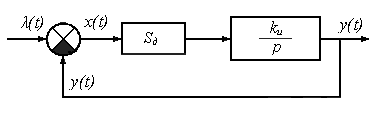
Рис.3
Пусть ![]() ;
; ![]() ,
,
где ![]() ─ дисперсия задающего
воздействия;
─ дисперсия задающего
воздействия;
![]() - параметр, определяющий ширину
спектра.
- параметр, определяющий ширину
спектра.
Определим величину дисперсии ошибки слежения ![]() , обусловленную
неточностью воспроизведения задающего воздействия.
, обусловленную
неточностью воспроизведения задающего воздействия.
 ;
;
 ,
,
где![]() ;
; ![]() - коэффициент передачи
интегратора;
- коэффициент передачи
интегратора;
![]() - крутизна дискриминационной
характеристики.
- крутизна дискриминационной
характеристики.
 ;
;  ;
;
приведем выражение к стандартному виду:
![]() ;
;
![]() (jw) =(
(jw) =(![]() +jw) (Kv+jw) =(jw) 2 +(
+jw) (Kv+jw) =(jw) 2 +(![]() +Kv) jw+
+Kv) jw+![]() Kv;
Kv;
![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;
;  ;
;
При увеличении ![]()
![]() уменьшается, в то время как в
первом примере
уменьшается, в то время как в
первом примере ![]() увеличивается.
увеличивается.
Эквивалентная шумовая полоса следящих систем
Под эквивалентной шумовой полосой следящей системы понимают полосу пропускания эквивалентной системы, имеющей прямоугольную АЧХ, одинаковое с исходной системой ее значение на нулевой частоте и одинаковую дисперсию на выходе при воздействии на входы систем белого шума (рис.4).
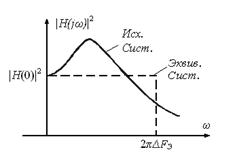
Рис.4. АЧХ исходной и эквивалентной систем.
Чтобы определить полосу пропускания ![]() используем условие равенства
дисперсий:
используем условие равенства
дисперсий:

Отсюда
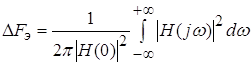 .
.
Использование значения эквивалентной шумовой полосы позволяет упростить вычисление дисперсии:
![]() ;
; ![]() .
.
Если ![]() , то
, то ![]() , или
, или ![]() ,
,
где ![]() ─ односторонняя
спектральная плотность.
─ односторонняя
спектральная плотность.
Формулы для расчета эквивалентной шумовой полосы систем приведены в табл.1
Таблица 1. Формулы для расчета эквивалентной шумовой полосы.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Оптимизация параметров следящих систем
Для решения задачи оптимизации необходимо определить структуру системы, предъявляемые требования и ограничения, накладываемые на систему, описать воздействия и возмущения, выбрать критерий оптимизации и метод.
Оптимизируем параметры kи2 и T1 в системе (рис.5), в которой задающее воздействие λ(t) – детерминированная функция, а возмущение ─ случайный процесс ξ(t).
В качестве критерия оптимизации используем критерий минимума среднего квадрата ошибки:
![]() ; (5)
; (5)
где ![]() - квадрат математического
ожидания ошибки слежения.
- квадрат математического
ожидания ошибки слежения.
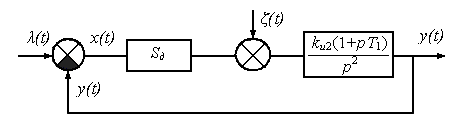
Рис.5. Структурная схема оптимизируемой системы.
Исходные данные:
![]() ;
; ![]() .
.
Необходимо определить ![]() и
и ![]() по критерию (5).
по критерию (5).
Величина математического ожидания (динамической ошибки) определяется выражением
 .
.
Величина дисперсии ошибки:
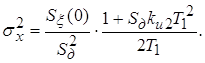
 . (6)
. (6)
Для определения оптимальных значений параметров воспользуемся методом дифференцирования:
 .
.
Из этого уравнения определяем
 . (7)
. (7)
Подставив в исходное уравнение (6) вместо T1 его оптимальное значение (7) и продифференцировав по переменной kи2, найдем ее оптимальное значение
 .
.
Пусть задающее воздействие является случайным процессом с нулевым математическим ожиданием и спектральной плотностью
Флюктуационная составляющая характеризуется спектральной
плотностью ![]() .
.
В качестве фильтра используется идеальный интегратор:
 .
.
Найдем оптимальное значение коэффициента передачи
интегратора ![]() по
критерию минимума суммарной ошибки слежения:
по
критерию минимума суммарной ошибки слежения:
![]() ,
,
где ![]() ─ величина дисперсии ошибки,
обусловленная неточным воспроизведением входного воздействия;
─ величина дисперсии ошибки,
обусловленная неточным воспроизведением входного воздействия; ![]() ─ величина
дисперсии ошибки обусловленная воздействием флюктуационной составляющей.
─ величина
дисперсии ошибки обусловленная воздействием флюктуационной составляющей.
 . (8)
. (8)
Продифференцируем (8) по ![]() и приравняем производную нулю. В
результате получим
и приравняем производную нулю. В
результате получим
 .
.
Память следящих систем
Радиотехнические системы работают в условиях многолучевого распространения радиоволн, поэтому при приеме сигнала наблюдается эффект замирания сигнала. Попадание на вход приемника мощной широкополосной помехи приводит к смещению рабочей точки характеристики активного элемента на нелинейный участок характеристики и в результате – к подавлению полезного сигнала мощной помехой. Сигнал на входе следящей системы пропадает, что эквивалентно размыканию контура. На структурной схеме (Рис.6) это явление можно отобразить введением двух ключей Кл1 и Кл2. Пропадание сигнала приводит к размыканию ключа Кл1 и переводу ключа Кл2 в положение 2, поскольку меняется характер флюктуаций.
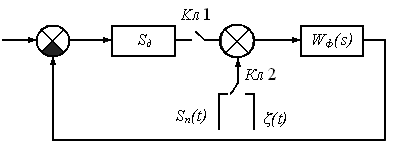
Рис.6. Структурная схема следящей системы с учетом пропадания полезного сигнала на входе.
Если в режиме слежения закон распределения ошибки нормальный
с нулевым математическим ожиданием и в момент времени ![]() следящая система разомкнулась, то
через время
следящая система разомкнулась, то
через время ![]() ,
характер распределения ошибки слежения изменится: увеличится математическое
ожидание и дисперсия. Если в момент
,
характер распределения ошибки слежения изменится: увеличится математическое
ожидание и дисперсия. Если в момент ![]() значение ошибки не выходит за
пределы апертуры дискриминационной характеристики, то появление сигнала
приведет к восстановлению режима слежения. Если же
значение ошибки не выходит за
пределы апертуры дискриминационной характеристики, то появление сигнала
приведет к восстановлению режима слежения. Если же ![]() , то происходит срыв слежения.
, то происходит срыв слежения.
Вероятность того, что через ![]() после пропадания сигнала ошибка
слежения не превышает
после пропадания сигнала ошибка
слежения не превышает ![]() определяет память следящей
системы:
определяет память следящей
системы:
 .
.
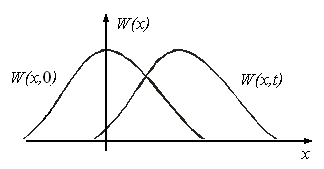
Рис.7. Распределение плотности вероятности ошибки слежения.
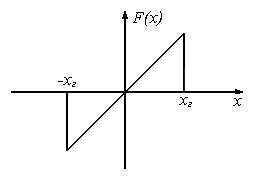
Рис.8. Дискриминационная характеристика.
Рассмотрим пример.
Пусть следящая система имеет два интегратора (рис.9).
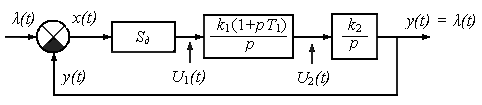
Рис.9. Структурная схема системы.
Задающее воздействие определяется линейной зависимостью
![]() ;
;
Поскольку система является астатической с астатизмом второго порядка установившееся значение ошибки равно нулю, т.е.
![]() .
.
Следовательно,
![]() ;
; ![]() , а
, а ![]() ,
,
т.е. напряжение на входе второго интегратора пропорционально
скорости изменения задающего воздействия ![]() .
.
Таким образом, система отслеживает скорость изменения входного процесса не по рассогласованию а по памяти. При пропадании сигнала на вход система будет отслеживать его изменение, если скорость не изменятся. При восстановлении сигнала ошибка будет минимальной, или равной нулю (в реальной ситуации срыв может произойти в результате флюктуаций управляемой величины под воздействием помех).
Память следящих систем определяется числом интегрирующих звеньев. Одно звено обеспечивает память по положению, два – по скорости, три – по ускорению.
Таким образом, система с астатизмом n –го порядка обладает памятью по n-1 производной задающего воздействия.
ЛИТЕРАТУРА
1. Коновалов. Г.Ф. Радиоавтоматика: Учебник для вузов. – М.: Высш. шк., 2000.
2. Радиоавтоматика: Учеб. пособие для вузов. / Под ред.В.А. Бесекерского. - М.: Высш. шк., 2005.
3. . Первачев С. В. Радиоавтоматика: Учебник для вузов. - М.: Радио и связь, 2002.
4. Цифровые системы фазовой синхронизации / Под ред. М.И. Жодзишского – М.: Радио, 2000
| Проектирование магистральной волоконно-оптической системы передачи с ... | |
|
Аннотация Дипломный проект посвящен вопросу проектирования магистральной волоконно-оптической системы передачи с повышенной пропускной способностью ... Параметр хроматической дисперсии стандартного ступенчатого волокна в пс/(нм=км) рассчитывается по формуле где ѭ0 - длина волны нулевой дисперсии, нм; ѭC - центральная длина волны ... Его полоса пропускания меньше, чем эквивалентная скорость передачи, тогда как полоса пропускания других компонентов приемника проектируется так, чтобы быть больше эквивалентной ... |
Раздел: Рефераты по коммуникации и связи Тип: дипломная работа |
| Нейрокомпьютерные системы | |
|
Введение. ПОЧЕМУ ИМЕННО ИСКУССТВЕННЫЕ НЕЙРОННЫЕ СЕТИ? После двух десятилетий почти полного забвения интерес к искусственным нейронным сетям быстро ... Это показывает, что двухслойная линейная сеть эквивалентна одному слою с весовой матрицей, равной произведению двух весовых матриц. 2.2, вероятность того, что случайно выбранная функция окажется линейно разделимой, весьма мала даже для умеренного числа переменных. |
Раздел: Рефераты по информатике, программированию Тип: реферат |
| Прикладная теория информации | |
|
В.И. Дмитриев ПРИКЛАДНАЯ ТЕОРИЯ ИНФОРМАЦИИ Москва 1989 Оглавление Введение. 3 § В.1. О понятии "информация". 5 § В.2. Этапы обращения информации. 7 ... Функцию Suu(w), характеризующую распределение дисперсии случайного процесса по частотам, называют спектральной плотностью стационарного случайного процесса U(t). Поскольку понятие спектральной плотности стационарного случайного процесса играет большую роль при исследовании преобразования сигналов линейными системами, уточним ее свойства и ... |
Раздел: Рефераты по информатике, программированию Тип: книга |
| Случайные величины | |
|
Случайные величины Оглавление Случайные величины.. 2 Функция распределения вероятностей.. 3 Основные свойства функции распределения вероятностей.. 5 ... Таким образом, параметр в плотности нормальной случайной величины является дисперсией этой величины, а среднеквадратичное уклонение определяет эффективную ширину плотности ... Первое из них - дисперсия, или случайная (стохастическая) компонента ошибки, а второе - квадрат смещения - систематическая ошибка. |
Раздел: Рефераты по математике Тип: реферат |
| Кодеры речи | |
|
Глава1 Кодеры формы. Кодеры формы характеризуются способностью сохранять основную форму речевого сигнала. Кодеры формы не являются специфичными для ... Наиболее точная модель речи представляет собой нестационарный случайный процесс с медленно меняющейся дисперсией и спектральной плотностью. Кодер, основанный на принципах кодирования методом "анализ через синтез" с линейным предсказанием, минимизирует взвешенный сигнал ошибки, работает с блоками (фреймами) по 240 ... |
Раздел: Рефераты по информатике, программированию Тип: реферат |