Реферат: Автомобильные датчики и интеллектуальные транспортные системы
Раздел: Рефераты по транспорту
Тип: реферат
Введение
Студент группы 11А/07 Романов С.И., далее автор сразу извиняется за немного нестандартный и мягко сказать оригинальный способ изложения материала реферата. Автор не скрывает факт использования Internet и статей, в нём опубликованных, правила копирайта при этом были соблюдены.
И так тема реферата «автомобильные датчики» наверняка каждому связанному с техникой на ум приходит конструкция датчика уровня топлива, температуры и давления масла, да, да всех тех приборчиков, которые автор ещё в первом классе школы разбирал подручными средствами, с целью узнать As it works. Так вот, это было первое и последнее упоминание, про подобные датчики. Реферат не про них. А про что? Реферат посвящен Интеллектуальным Транспортным Системам (ITS — Intelligent Transportation Systems).Подобные разработки разрушают сложившееся представление о том, что создание полноценного автомобиля-робота теоретически невозможно, поскольку эта задача относится к классу AI-complete («совершенный искусственный интеллект»), то есть может быть решена, только если робот будет обладать интеллектом человека во всей его полноте. В случае, если интеллект робота уступает человеческому, всегда может возникнуть какая-то нештатная ситуация, в которой он окажется бессилен. С этой точкой зрения можно было бы согласиться, если бы не реальный интеллектуальный уровень многих современных водителей, и если не знать реальную ситуацию на дорогах— во всяком случае, на отечественных дорогах. Не вызывает сомнения, что если бы живые водители были столь же дисциплинированны, как и роботы, и не употребляли алкоголь и наркотики, а неизбежные несчастные случаи являлись бы только следствием нештатных ситуаций, оказавшимся роботам не под силу, то жертв на дорогах стало бы на порядки меньше. Почти десять лет издается международный журнал IEEE Transactions on Intelligent Transportation Systems. Увы, в России, как это обычно бывает, термин «интеллектуальные транспортные системы» используется как-то по-особому однобоко. В основном его относят к практическим приемам организации транспортных потоков, учету передвижения транспортных средств и навигации, а о теоретических исследованиях и серьезных публикациях на тему ITS на русском языке автору ничего неизвестно.
Инициатива ITS стала возможной потому, что современный автомобиль активно роботизируется изнутри и сегодня оснащен целым рядом систем автоматизации. Помимо уже вошедших в обиход автоматических коробок передач, систем автоматической блокировки торможения и систем управления другими агрегатами плюс обычного круиз-контроля, существуют: система информирования о состоянии дорожного покрытия, особенно об оледенении; система адаптивного круиз-контроля, воспринимающая данные от систем обнаружения соседних автомобилей; система взаимного информирования автомобилей, снабженных системами GPS; средства слежения за дорожной разметкой; системы автоматизированной парковки; устройства для просмотра мертвых зон; системы контроля скорости на поворотах.
Но это общие рассуждения уставшего водителя, а пока ITS получившая значительное распространение во всем мире, все же исходит из действующей парадигмы «за рулем водитель». Логичным продолжением этого направления стали системы Internet для автомобилей. Каким бы совершенным ни был робот, он эффективнее работает во взаимодействии с себе подобными. В системах могут использоваться совместно действующие объекты, образующие то, что теперь называют «разумным роем»
Подобную систему Extended Floating Car Data-System (XFCD) представила компания BMW.
Испытание проводилось на специальной тестовой трассе в SBC Park и было призвано продемонстрировать возможности системы. Например, автомобиль попадает на скользкую дорогу. За считанные секунды система обрабатывает информацию и предупреждает в режиме реального времени следующий за ним автомобиль. Та же информация в то же самое время передается стационарным службам движения, которые статистически обрабатывают поступающие данные и рассылают их обратно другим участникам движения.
Система определения дорожной ситуации XFCD станет в будущем усовершенствованным последователем существующей системы Floating Car Data, что переводится как "данные с движущегося автомобиля". Уже сегодня с помощью FCD автомобили посылают свои данные о местонахождении в определенный момент времени на центральный пульт движения, который сопоставляет получаемые сообщения с сообщениями других автомобилей, оснащенных FCD, с целью распознавания дорожных и внештатных ситуаций. Система XFCD способна сама распознавать дорожную ситуацию, анализировать все имеющиеся данные в автомобиле и передавать обработанные данные на центральный пульт движения. Параллельно система способна через систему-коммуникатор "Авто-Авто" предупреждать другие автомобили в зоне действия передатчика.
Как говорится всё гениальное просто, для разработанной автомобильной новинки не требуется установки никаких дополнительных аппаратов. XFCD функционирует на базе имеющейся навигационной системы, и ее ввод в эксплуатацию заключается лишь в загрузке программы. Введение бортовой сети позволяет синхронно задействовать целый спектр возможностей. В устроенном таким образом современном автомобиле система получает доступ и совмещение с множеством других инфо-блоков управления. Это ближний и дальний свет, противотуманное освещение, термометр внешней среды и кондиционер, тормоза и навигационная система, сенсор дождя и омыватель стекла, а также прочие не менее важные мелочи. Все эти механизмы функционируют в зависимости от дорожной ситуации. Так, на понижение температуры окружающей среды, лед или даже неожиданное появление масла на участке дороги автомобиль тут же отреагирует регулированием системы стабилизационного контроля (DSC) и скорости движения.
Еще одно неоспоримое преимущество системы XFCD заключается в возможности передачи сообщений напрямую другим автомобилям. Информация передается посредством Ad-hoc-сети всем автомобилям в ближайших окрестностях. Каждый автомобиль, в зависимости от ситуации, выполняет роль или отправителя, или получателя, или передатчика. Преимущество зарекомендовавшей себя технологии Multi-Hopping неоспоримо: Ad-hoc-сеть организуется автономно, обладает необходимой дальностью радиуса действия и не требует создания специальной инфраструктуры.
Система XFCD создана BMW Group в рамках концепта BMW ConnectedDrive. Основополагающая идея концепта – связывание воедино трех информаторов автомобильного движения "водитель - автомобиль - внешняя среда" посредством телекоммуникационных, онлайн и автомобильных вспомогательных систем ради безопасности движения.
Теперь понятно, что ключевой системой беспилотного автомобиля робота и ITS является интегрированная система, которая является бортовым компьютером, параметров движения и навигационной системой одновременно, постоянно связанным с себе подобными. Именно про датчики такого бортового компьютера пойдет далее речь.
А вообще вы уважаемый читатель можете с ходу объяснить что такое, и как работает«GPS навигация»? Сейчас разберёмся!
Навигационная система автомобиля.
Интегрированная навигационная система решает следующие задачи:
1. непрерывное определение координат в районах высотной городской застройки, в тоннелях, под мостами и путепроводами;
2. более точное счисление координат по сравнению с GPS, за счёт дополнительного оборудования;
3. счисление координат и курса транспортного средства без запаздывания;
Что такое GPS?
| GPS - это аббревиатура от английского названия Global Positioning System, что означает "система глобального позиционирования", или, в более правильном техническом переводе, - "глобальная система определения координат". Основные ее взаимодействующие элементы - это 24 космических спутника NavStar (запущены и принадлежат США) и миллионы приемников на поверхности Земли. |
 Работает
система так: приемник ловит сигнал от 3 и более спутников, замеряет время
задержки прохождения сигнала от каждого из них и автоматически рассчитывает
свое местоположение - географические координаты: широту, долготу, а также
высоту над уровнем моря. Эти данные процессор устройства соотносит с
электронной картой, загруженной в память прибора. Благодаря этому пользователь
видит на дисплее изображение географической карты, на которой показывается и
двигается "точка" - это он сам со своим GPS-приемником.
Работает
система так: приемник ловит сигнал от 3 и более спутников, замеряет время
задержки прохождения сигнала от каждого из них и автоматически рассчитывает
свое местоположение - географические координаты: широту, долготу, а также
высоту над уровнем моря. Эти данные процессор устройства соотносит с
электронной картой, загруженной в память прибора. Благодаря этому пользователь
видит на дисплее изображение географической карты, на которой показывается и
двигается "точка" - это он сам со своим GPS-приемником.
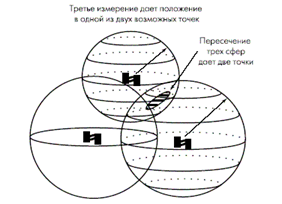
В основе работы системы GPS лежит принцип спутниковой трилатерации. Согласно этому принципу, координаты объекта на поверхности Земли могут быть вычислены по измерениям расстояний до спутников. Поскольку положение КА в пространстве известно и расчетные значения параметров своих орбит спутники передают вместе с дальномерным кодом, то для объекта на поверхности Земли спутники являются пунктами с известными в любой момент времени координатами.
Если расстояние от одного спутника известно, тогда можно описать сферу заданного радиуса вокруг него. Например, если до спутника 22 000 километров, то мы находимся где-то на воображаемой сфере радиусом 22 000 километров. Если известно расстояние до двух спутников , то искомая точка местоположения будет находится на окружности, представляющей собой пересечение двух сфер. Следовательно, круг нашего поиска существенно сузился. Получив сигнал от третьего спутника, мы получаем третью сферу, пересечение которой с окружностью дает две точки. Остается только выбрать правильную точку. Обычно одна из точек - это неправдоподобное решение, т.к. она находится или внутри Земли, или слишком высоко над поверхностью, или движется слишком быстро. Вычислители GPS-приемников снабжены различными устройствами, автоматически определяющими истинное местоположение из двух возможных.
Таким образом, получив сигнал как минимум от трех спутников, мы можем вычислить координаты любой точки вблизи поверхности Земли. Чтобы проводить столь качественные вычисления, необходимо пользоваться очень точными часами, ведь расхождение во времени всего в 1 тысячную долю секунды даст ошибку местоположения около 300 км. На борту спутников установлены атомные часы. Каждый спутник имеет их в количестве 4, чтобы можно было гарантировать, что хотя бы одни работают обязательно. Способ измерения времени основан на атомном стандарте частоты, который обеспечивает ход бортовых часов спутника с наносекундной точностью. А это 0,000000001 секунды!
Большинство GPS-навигаторов способны принять сигнал одновременно от 12 спутников. Этого более чем достаточно для решения большинства задач. Однако в настоящее время в продаже появились 14- и даже 18-канальные приемники. Но одновременно принять сигнал даже от 12 спутников очень сложно. Для этого необходимо находиться на открытом месте, причем само спутниковое созвездие (то есть положение спутников на небосклоне) должно быть благоприятно. Принять же сигнал сразу от 18 спутников в настоящее время просто невозможно, так как часть из них скрыта и находится по другую сторону земного шара.
Система GPS содержит в себе три фундаментальных составляющих.
1. Космический сегмент представляет собой 24 спутника, находящихся на 6 различных круговых орбитах, которые расположены под углом 60 градусов друг к другу. Спутники движутся по орбитам радиусом 22 200 километров со скоростью 11 тысяч километров в час и совершают один оборот вокруг Земли за период, приблизительно равный 12 часам. Все они ежедневно повторяют свою траекторию с "опозданием" в 4 минуты.
Вес каждого спутника около 900 кг, размер более 5 м, включая солнечные батареи. На каждом спутнике установлены атомные часы, обеспечивающие высокую точность (10-9 сек), вычислительно кодирующее устройство и передатчики мощностью 50 Вт и 8 Вт, излучающие на частотах L1 = 1575,42 МГц и L2 = 1227,60 МГц.
В идеале в любой момент времени любая точка Земного шара находится в зоне видимости не менее трех спутников. Спутники можно "увидеть" даже на полюсах, правда они будут находиться низко над горизонтом, что влияет на точность измерений, но несущественно.
Справедливости ради стоит отметить, что есть все же "темные" области в высоких широтах, где одновременно может быть не более 2 спутников, что не позволяет определять координаты и нарушает работу приемника GPS. Однако такое положение дел длится лишь от 15 до 45 минут, в остальном система навигации GPS действительно глобальна.
2. Наземный сегмент контролируется Министерством Обороны США. Он состоит из пяти контрольно-измерительных станций, которые находятся на Гавайях, на Кваджалейне, на острове Вознесения, в Диего-Гарсия и Колорадо-Спрингс, четырех станций связи и центра управления всей системой, расположенного на авиабазе в Шривере, штат Колорадо.
Станции слежения непрерывно контролируют движение космических аппаратов и передают данные в центр управления. В центре вычисляют уточненные элементы спутниковых орбит и коэффициенты поправок шкал времени. Эти данные поступают по каналам станций связи на спутники не реже, чем один раз в сутки.
3. GPS-приемник - третий сегмент системы навигации, который позиционируется и позволяет вычислять географические координаты на основе полученных данных.
Но, к сожалению, несмотря на все высокие технологии, примененные в GPS погрешности этой системы также глобальны и не могут быть использованы компьютером как основные данные для автоводителяя. Сам навигатор, по заявлениям производителей, определяет местоположение с точностью до 3-5 м. Однако очень многое тут зависит от числа спутников, которые "видят" прибор и, опять-таки, от электронных карт. Дело в том, что в России для гражданского использования разрешены карты масштабом не крупнее чем 1:1000, т. е. в 1 см карты - 1 км местности. На практике же это значит, что 100 м будут умещаться в 1 мм на экране.
Автомобиль видящий и коммуницирующий

Перечисленные выше уже созданные элементы автоматизации снимают технические проблемы управления агрегатами автомобиля. Остаются проблемы ориентации и взаимодействия с внешней средой. Для ориентации в пространстве могут использоваться разнообразные устройства, например, инфракрасные датчики, действующие на предельно близком расстоянии. Эти устройства хорошо известны. Менее известен так называемый «ладар», который иногда еще именуют «лидаром» от английского названия Light-Imaging Detection and Ranging. Сначала он использовался как прибор для измерения атмосферных характеристик дистанционным способом лазерного зондирования. Позже усилиями компании SICK ладар стал составной частью системы измерения дистанции (Laser Measurement Sensor, LMS). Идея ладара не оригинальна: LMS излучает несколько лучей и воспринимает отраженные данные. Лазеры монтируются в головке, вращающейся со скоростью несколько сотен оборотов в минуту. Наибольшая сложность заключается в том, что при движении по земле на коротких расстояниях с большой скоростью возникают большие угловые перемещения. Поэтому, несмотря на использование различного рода систем стабилизации и сложных подвесов, для обработки изображений в режиме реального времени требуется применение серьезной вычислительной мощности и соответствующего программного обеспечения. О масштабе решаемых задач можно судить по тому, например, что сканирующий ладар Velodyne’s HDL-64E генерирует данные по 2,5 млн. точек в секунду и передает их в виде пакетов данных, используя Fast Ethernet.
Обладая в полной мере свойствами инерциальной навигационной системы с полным набором датчиков ориентации и перемещения (см рисунок), интегрированная система способна определять все параметры движения транспортного средства: угловые скорости, ускорения, ударные и вибрационные воздействия, перегрузки.
При этом в отличие от традиционных блоков датчиков движения в интегрированной системе реализован сложный математический аппарат пересчета воздействий в различные системы координат. Поэтому потребитель может использовать выходную информацию системы непосредственно для своих приложений без предварительной обработки.
Гироскопы для автомобильных навигационных систем
Как уже говорилось, все чаще в автомобили устанавливаются навигационные системы, предназначенные для ориентации в незнакомой водителю местности, поиска оптимального маршрута и т.д. Подавляющее большинство таких систем основано на системе глобального спутникового позиционирования (GPS). Однако такая система имеет существенный недостаток невозможность работы в зоне неуверенного приема сигнала со спутников, в условиях мегаполиса, в тоннелях, подземных гаражах и т.д. Иногда оказывается, что точность определения и отслеживания координат с использованием GPS недостаточна для работы системы в целом.
В этом случае на выручку GPS приходят различные дополнительные датчики, например гироскопические датчики, которые позволяют отследить скорость и направление перемещения автомобиля без участия спутниковых систем.
Компания Murata, активно занимающаяся вопросами разработок, представила на рынок новый гироскоп серии MEV-50A-R.
Принцип действия датчика основан на возникновении силы Кориолиса при повороте качающегося маятника вокруг оси качения. При этом возникает сила Кориолиса, перпендикулярная плоскости качения маятника. Датчик состоит из так называемой биморфной пластины. Биморфная пластина представляет собой две керамические пластины с разной поляризацией, соединенные вместе. На одну из пластин биморфа подается высокочастотное напряжение, под действием которого весь биморф приводится в колебательное движение. При этом со второй пластины снимается напряжение, которое возникает при ее колебании, вызванном колебаниями первой пластины. При повороте пластин вокруг своей оси возникает сила Кориолиса, которая изменяет характер колебаний керамических пластин и, соответственно, приводит к изменению напряжения, снимаемого со второй пластины. Далее, этот сигнал обрабатывается и на выходе гироскопического датчика получается напряжение, которое прямо пропорционально скорости поворота датчика вокруг рабочей оси. Эта техника измерения позволяет добиться пониженного значения шумов, по сравнению с существующими методиками, применяемыми в акселерометрах. В будущем компания Murata планирует добавить в гироскопы цифровую схему температурной компенсации. Для включения гироскопа в электрическую схему потребуется минимум внешних компонентов: 5В регулятор напряжения, АЦП (встроен в большинство современных микроконтроллеров), фильтрующий конденсатор и два резистора.
Радар
Второй датчик
подразумевает использование радара, который работает по эффекту Доплера:
устройство высылает радиоимпульсы, они отражаются от объекта и
"летят" обратно. Затем компьютер вычисляет моментальную скорость
объекта, к сожалению, с некоторой погрешностью. Согласно Закону об измерениях,
при измерении скорости до 100 км/ч возможная погрешность составляет до 5 км/ч.
Если же скорость объекта больше 100 км/ч, то погрешность измерений может
составлять до 3 процентов.
Автор считает, что не стоит подробнее излагать возможные конструкции радаров,
надеясь, что всем про это известно, тем более что следующий датчик схож по
принципу действия, имеет более высокую точность и относительно недавно
изобретён.
Ладар и лидар, два названия одного прибора.
Скорость можно также замерить ладаром, принцип работы которого похож на устройство обыкновенного лазерного дальномера. Для своих вычислений ладар берет за основу два местонахождения объекта и время, за которое он преодолел расстояние между ними. Далее компьютер делит расстояние на время и получает моментальную скорость. Стоит отметить, что если с радаром прицеливать не обязательно, то ладар необходимо направлять исключительно на номерной знак автомобиля, поскольку он является лучшим отражающим элементом на автомобиле.
LIDAR (англ. Light Detection and Ranging, лида́р) — технология получения и обработки информации об удалённых объектах с помощью активных оптических систем, использующих явления отражения света и его рассеивания в прозрачных и полупрозрачных средах.
Лидар как прибор представляет собой, как минимум, активный дальномер оптического диапазона. Сканирующие лидары в системах машинного зрения формируют двумерную или трёхмерную картину окружающего пространства. Устоявшийся перевод LIDAR как «лазерный радар» не вполне корректен, так как в системах ближнего радиуса действия (например, предназначенных для работы в помещениях), главные свойства лазера: когерентность, высокая плотность и мгновенная мощность излучения — не востребованы, излучателями света в таких системах могут служить обычные светодиоды.
История создания.
В первой половине 1960-х годов, начались опыты по применению лидара с лазерным излучателями для исследования атмосферы.
В 1969 году лазерный дальномер и мишень, установленная на Аполлоне-11, применялся для измерения расстояния от Земли до Луны. Четыре мишени, доставленные на Луну тремя «Аполлонами» и «Луноходом-2», и по сей день используются для наблюдения за орбитой Луны.
В течение 70-х годов, с одной стороны, отлаживалась технология лазерных дальномеров и компактных полупроводниковых лазеров, а с другой — были начаты исследования рассеяния лазерного луча в атмосфере. К началу 80-х годов эти исследования стали настолько известными в академических кругах США, что аббревиатура LIDAR стала именем нарицательным — lidar, что зафиксировал словарь Уэбстера 1985 года. В те же годы лазерные дальномеры достигли стадии зрелой технологии (по крайней мере, в военных приложениях) и выделились в отдельную от лидаров отрасль техники.
Принцип действия
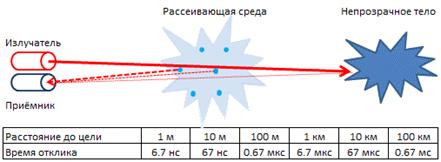
Принцип действия лидара не имеет больших отличий от радара: направленный луч источника излучения отражается от целей, возвращается к источнику и улавливается высокочувствительным приёмником (в случае лидара — светочувствительным полупроводниковым прибором); время отклика обратно пропорционально расстоянию до цели. В отличие от радиоволн, эффективно отражающихся только от достаточно крупных металлических целей, световые волны подвержены рассеиванию в любых средах, в том числе в воздухе, поэтому возможно не только определять расстояние до непрозрачных (отражающих свет) дискретных целей, но и фиксировать интенсивность рассеивания света в прозрачных средах. Возвращающийся отражённый сигнал проходит через ту же рассеивающую среду, что и луч от источника, подвергается вторичному рассеиванию, поэтому восстановление действительных параметров распределённой оптической среды — достаточно сложная задача, решаемая как аналитическими, так и эвристическими методами. В устройствах ближнего радиуса действия вместо коротких импульсов может использоваться непрерывная амплитудная модуляция излучения переменным напряжением с частотой в единицы мегагерц.
Инфракрасный датчик движения
Датчик, обнаруживающий перемещение каких-либо объектов.
Принцип работы основан на отслеживании уровня ИК - излучения в поле зрения датчика (как правило, пироэлектрического). Сигнал на выходе датчика монотонно зависит от уровня ИК излучения, усредненного по полю зрения датчика. При появлении человека (или другого массивного объекта с температурой большей, чем температура фона) на выходе пироэлектрического датчика повышается напряжение. Этот скачёк и является сигналом для включения нагрузки датчика движения. Датчик обнаруживает только изменения ИК фона, то есть неподвижный объект не будет обнаружен.
Ограничения
Инфракрасный датчик прост и надёжен по конструкции, но его применение в системах автоматического управления связано с некоторыми проблемами. Так, например, в поле зрения датчика не должен попадать уровень земли (дорожного покрытия), и зона действия не должна превышать 3 метров иначе система постоянно будет регистрировать различные помехи, в том числе и естественные.
Ультразвуковой датчик
Основной элемент активного круиз-контроля - ультразвуковой датчик, установленный в переднем бампере или за радиаторной решеткой автомобиля. Его принцип работы аналогичен датчикам парковочного радара, только радиус действия составляет несколько сотен метров, а угол охвата, наоборот, ограничен несколькими градусами. Посылая ультразвуковой сигнал, датчик ждет ответа. Если луч нашел препятствие в виде автомобиля, движущегося с меньшей скоростью и вернулся - значит, необходимо снизить скорость. Как только дорога вновь освобождается, машина разгоняется до первоначальной скорости.
Вот и всё, на этом месте автор может спокойно закончить реферат, так-как основные автомобильные датчики перечислены и даже немного описаны. Но если вы честно (без скорочтения) дочитали до этого места то, похоже, тема вам действительно интересна. Специально для вас автор не жалеет ни времени ни бумаги не чернил, и продолжает! Далее будут описаны датчики, которые вовсе не нужны «умной» машине, но могут быть полезны не менее умному водителю.
Автомобильные датчики дождя.
Автомобильные датчики дождя... То ли это предмет роскоши и явное излишество, то ли это необходимое средство повышения безопасности. Попробуем разобраться вместе. Каждый раз, когда появляется возможность опробовать «на себе» какие-либо новинки, встает вопрос: «Рискнуть или нет?».
Но с датчиком дождя как-то все сразу стало ясно — рискнуть стоит. Во-первых, интересно. Во-вторых, нынешнее лето как-то само собой располагает к подобным экспериментам. В-третьих, поддержать отечественного производителя — благое дело. Прежде всего, для чего нужен такой датчик? Устанавливаемые в автомобили среднего и высокого класса комплекты автоматически включают «дворники» при начале дождя. Лучшие модели еще и выбирают фиксированные скорости работы стеклоочистителей в зависимости от интенсивности осадков. Тем самым водитель освобождается от рутинной работы с подрулевым переключателем и гораздо больше внимания может уделять собственно управлению автомобилем. Так что, как видите, здесь налицо и комфорт, и забота о безопасности.
Российский датчик дождя (ДД), разработанный компанией «Сети и системы», представляет собой комплект, в который входят блок оптического контроля, блок реле, штекерный разъем и кнопка управления. Чтобы все правильно установить, необходимо знать несколько простых правил. Оптический датчик крепится с внутренней стороны ветрового стекла обязательно в зоне работы щеток стеклоочистителя. Место крепления блока реле вы вольны выбирать сами. В «десятке», например, его удобно крепить в нише блока реле и предохранителей. Для управляющей кнопки есть штатное место.
Как же показала себя новинка? Если при выезде вы не забыли включить заветную кнопку, то при первых каплях дождя она включит «дворники» еще до того, как вы сообразите это сделать сами. В отличие от своих импортных аналогов, российский датчик ПЛАВНО меняет частоту движения щеток в зависимости от интенсивности ливня. Кроме этого, датчик может выполнять и одну новую функцию, так сказать, национального свойства. Если встречная или обгоняемая машина окатила вас грязным потоком, в работу включается не только «дворник», но и система омывания. То же самое происходит и при движении по пыльным дорогам. Столь высокую чувствительность прибору обеспечивают не четыре, как у большинства аналогов, а девять светоприемников.
Двухмесячный опыт эксплуатации показал не только высокую оперативность и надежность комплекта, но и его универсальность. Если, например, включить ДД в контур управления стеклоподъемниками или привода люка, то тогда он сам закроет их с наступлением дождя. Самое главное, оказывается, — не забыть выключить автомат во время механической мойки, иначе можно лишиться щеток.
Автомобильные шины с электронными датчиками
Французская компания Michelin собирается устанавливать в свои автомобильные покрышки электронные датчики, которые будут постоянно передавать на бортовой компьютер автомашины данные о давлении. Система Michelin состоит из микросхемы размером со спичечную головку и встроенного радиопередатчика с антенной. Оба элемента будут завулканизированы внутри шины. Как сообщила в интервью Reuters представитель компании Нэн Бэнкс, такое расположение устройства практически не повлияет на качество передачи, так как сигнал ослабевает на 10%.
Видеосистема.
Сущность видеосистемы заключается в контроле «слепых» зон автомобиля. При этом изображение с видеокамер в реальном времени передаётся на монитор установленный в салоне или на место боковых зеркал. Разрабатывается проект, в котором изображение проецируется непосредственно на лобовое стекло при этом, не мешая водителю. Видеокамеры в дорогих системах подкрепляются инфракрасными и ультразвуковыми датчиками, которые в случае опасности заранее предупреждают водителя. Во время поездки по городу камеры наблюдения фиксируют категории автомобилей, дорожную разметку и знаки. Например, автомобиль видит знак "Стоп" и предупреждает водителя о нем. Если же водитель не среагирует, то автомобиль остановится сам.
Заключение.
Верно, говорится, будущее наступает сегодня создание беспилотного автомобиля робота стало вполне возможно. И он уже существует, уже проводятся соревнования между подобными творениями
Автомобили без водителей
Из-за своей зрелищности автомобили-роботы привлекают к себе значительное внимание общественности. Этому обстоятельству способствуют и ставшие регулярными гонки DARPA Grand Challenge, которые уже проводились в 2004-м и 2005 году. Последние же состоялись в ноябре 2007 года.
Впервые о своем намерении организовать соревнования для роботов в DARPA объявили в 2002 году, и DARPA Grand Challenge 2004 состоялись в пустыне Мохаве, где была проложена трасса по пересеченной местности протяженностью более 300 километров. Поставленные условия и новизна задачи вызвали к жизни появление разнообразных монстров, построенных на базе военных внедорожников и тяжелых грузовиков, а также оригинальные конструкции, материалы об этих машинах — просто рай для любителей автоэкзотики. Но результат оказался плачевным; самую большую дистанцию, равную всего 11,78 км, преодолела машина из университета Карнеги-Мелонн, построенная на базе армейского внедорожника Hammer.
Соревнования 2005 года оказались успешнее; пять участников прошли всю трассу. Первое место заняла команда Стэндфордского университета, роботизировавшая стандартный Volkswagen Tuareg, сейчас эта машина после двухлетнего тура в Европу нашла свое место в Смитсоновском музее в Вашингтоне. На пятом месте оказался чудовищный по своим размерам грузовик TerraMax, представленный компанией Oshkosh Truck и лабораторией машинного зрения и интеллектуальных систем из университета Парма (Италия). Эта победа Давида над Голиафом подсказала направление для дальнейшего развития: главным условием ее достижения оказалось качество программного обеспечения. Для обработки данных, поступавших от разных датчиков и систем, команда-победитель написала свыше 100 тыс. строк кодов, были использованы методы машинного обучения. С одной стороны, они позволили компьютеру освоить перенятые от человека приемы вождения, а с другой — в этой системе появились зачатки того, что называют cognitive processing, то есть симуляция процессов познания в аппаратно-программной среде. Успех Стэндфордского университета определил приоритеты для будущих гонок.
Надо заметить, что в DARPA не открыли Америки: проектирование роботизированных автомобилей началось задолго до 2002 года. Попадались и отрывочные сведения об отечественных устройствах, предназначенных для работы в зонах с радиационным загрязнением, но по вполне понятным причинам в открытых источниках они не описаны. Достоверно известно, что в 1977 году механическая лаборатория из Цукубы, академического пригорода Токио, первой создала беспилотный автомобиль. В 80-е годы центром аналогичных работ в Европе стала компания Mercedes-Benz, их возглавлял очень авторитетный специалист в этой области Эрнст Дикманн. В 1986 году под его руководством был построен грузовик VaMoRs, развивший скорость 96 км/час. Команда Дикманна ориентировалась главным образом на создание систем «компьютерного зрения», она использовала транспьютеры британской фирмы INMOS, на которые возлагали большие надежды, и методы параллельного программирования. В 1994-1995 годах наработки перенесли на платформу легкового автомобиля S-класса Daimler-Benz, было построено два экземпляра VITA-2 and UniBwM (VaMP). Эта разработка оказалась наиболее значительным успехом на этом историческом отрезке, автомобиль развивал скорость до 175 км/ч и проезжал по автобану свыше 150 километров без вмешательства человека. В ограниченных масштабах работы продолжаются до сих пор; в 2006 году было даже проведено соревнование European Land-Robot Trial. Два проекта ведутся в Израиле, оба они используют в качестве базы не имеющий аналогов, созданный в этой стране багги Tomcar.
Особого упоминания заслуживает итальянский проект ARGO (1996–2001 годы). В конечном итоге модифицированная и снабженная специальными видеокамерами Lancia Thema прошла свыше 2 тыс. км по дорогам со средней скоростью 90 км/ч, 94% времени она находилась в автоматическом режиме. Руководителем проекта ARGO был профессор Альберто Броджи, он же возглавлял работы по созданию роботизированного автомобиля TerraMax— участника DARPA Grand Challenge 2005.
Беспилотные транспортные средства. В 1987—1995 годах в ходе проекта EUREKA Prometheus, стоившего Европейскому Союзу более 1 млрд. долларов, были выработаны первые практические разработки беспилотных автомобилей. Наиболее известный прототип, VaMP (разработчик — Университет бундесвера в Мюнхене) не использовал лидары из-за недостатка вычислительной мощности тогдашних процессоров. Новейшая их разработка, MuCAR-3 (2006), использует единственный лидар кругового обзора, поднятый высоко над крышей машины, наравне с направленной мультифокальной камерой обзора вперёд и инерциальной навигационной системой. Лидар MuCAR-3 используется подсистемой выбора оптимальной траектории на пересечённой местности, он даёт угловое разрешение в 0.01° при динамическом диапазоне оптического приёмника 1:106, что даёт эффективный радиус обзора 120 м. Для достижения приемлемой скорости сканирования используется пучок из 64 расходящихся лазерных лучей, поэтому один полный «кадр» требует единственного оборота вращающегося зеркала.
С 2003 года правительство США через агентство передовых военных разработок DARPA финансирует разработку и соревнование автомобилей-роботов. Ежегодно проводятся гонки DARPA Grand Challenge; в гонке 2005 года победила машина из Стэнфорда, в основе системы зрения которой — пять лидаров направленного обзора.
Все про автомобили-роботы
Для тех, кто заинтересуется автомобилями-роботами, есть неплохие источники информации. Прежде всего, это специализированный выпуск журнала Computer, выпущенный в декабре 2006 года под девизом «Unmanned Vehicles Come of Age», то есть «Беспилотные автомобили достигли совершеннолетия».
Кроме того, есть два глубоких материала, написанных создателями этих транспортных средств.
Брошюра Джеймса Дьебела Stanley: The Robot That Won The DARPA Grand Challenge (ai.stanford.edu/~diebel/stanley/thrun.stanley05.pdf).
Статья Альберто Броджи The TerraMax Autonomous Vehicle, опубликованная в журнале Journal of Field Robotics и выложенная на сайте автора (www.ce.unipr.it/people/broggi/publications/jfr-terramax.php).
В Сети в избытке имеются фото- и видеоматериалы, посвященные DARPA Grand Challenge 2007. Если же кого-то заинтересует автомобильная «антиэстетика», то стоит заглянуть на сайт Oshkosh Truck.
Вот теперь действительно всё, автор надеется, что рассказал обо всём что хотел, и при этом не слишком надоел. Отзывы о прочитанном направлять на электронную почту автора: rsi-88@mail.ru
Список использованных источников
Портал «Википедия»
(статья про лидар , GPS, инфракрастный датчик)
www.wikipedia.org
Сайт «Текнол»
(статья про автомобильные навигационные системы)
www.tekno.ru
Сайт журнала «Открытые системы»
(статья про автомобильный internet и навигационные системы)
www.osp.ru
Портал «Колёса»
(статья про автомобильную GPS-навигацию)
www.kolesa.ru
Саит «Laduauto»
(статья про автомобильные датчики дождя)
www. laduauto.ru
Портал «Inopressa»
(статья про соревнования DARPA)
www. inopressa.ru
| ... технической эксплуатации ходовой части автомобилей "Toyota" | |
|
... национальный технический университет Автотракторный факультет Кафедра "Техническая эксплуатация автомобилей" Расчётно-пояснительная записка к ... Неисправные амортизаторы приводят к нестабильному и неравномерному освещению дороги, а также ослеплению встречных водителей автомобилей. Каждая из площадок 2 (рис.1.3.1) снабжена встроенными датчиками для измерения как статической, так и динамической нагрузки на колеса автомобиля. |
Раздел: Рефераты по транспорту Тип: курсовая работа |
| Навигационный проект перехода Малага - Неаполь т/х "Пархоменко ... | |
|
ХЕРСОНСКИЙ МОРСКОЙ КОЛЛЕДЖ Судоводительское отделение КУРСОВОЕ ПРОЕКТИРОВАНИЕ ПО ПРЕДМЕТУ "НАВИГАЦИЯ И ЛОЦИЯ" ПО ТЕМЕ "НАВИГАЦИОННЫЙ ПРОЕКТ ПЕРЕХОДА ... Датчик вертикального момента с помощью индикатора горизонта будет удерживать главную ось в плоскости горизонта, а чтобы главная ось прецессировала вместе с меридианом (хотя она ... 1.Автоматическое определение места судна по сигналам навигационных спутников независимо от выполнения прибором остальных функций. |
Раздел: Рефераты по транспорту Тип: курсовая работа |
| Внедрение системы спутникового мониторинга транспорта на примере ... | |
|
Содержание Введение 1. Спутниковые системы радиоместоопределения 1.1 Ретроспективный анализ систем радиоместоопределения 1.2 Оптимальная структура ... Это приводит к большим погрешностям определения координат места потребителя, что недопустимо для гражданской авиации, однако при этом к 2011 году погрешность определения координат ... ГЛОНАСС/GPS online является устройством, которое позволяет отслеживать все параметры движения объекта (его координаты, скорость, курс, дату и время, данные датчиков) в режиме ... |
Раздел: Рефераты по транспорту Тип: дипломная работа |
| Модернизация системы охлаждения двигателя "Газели" | |
|
СОДЕРЖАНИЕ Введение и постановка задачи 1. Назначение и обзор систем охлаждения 1.1. Устройство, работа и конструктивные особенности систем ... 1- ДВС; 2- датчик числа оборотов коленвала; 3- датчик скорости; 4- отопитель салона; 5- электромагнитный клапан системы отопления салона; 6- включатель - регулятор отопителя; 7 ... Во время работы водитель обязан выполнять правила безопасности движения, указания регулировщиков уличного движения; поддерживать скорость в соответствии с требованиями Правил ... |
Раздел: Рефераты по транспорту Тип: дипломная работа |
| Система глобального позиционирования | |
|
Московский колледж управления и новых технологий Реферат по предмету "Периферийные устройства" Тема реферата: "Система глобального позиционирования ... После отмены американцами режима селективного доступа точность определения координат с помощью простейшего гражданского GPS навигатора составляет от 5 до 20 метров (высота ... Основой системы GPS являются навигационные спутники, движущиеся вокруг Земли по 6 круговым орбитальным траекториям (по 4 спутника в каждой), на высоте 20180 км. |
Раздел: Рефераты по коммуникации и связи Тип: реферат |