Курсовая работа: Динамический синтез систем автоматического управления
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
Тема: "Динамический синтез систем автоматического управления"
Введение
Существует чрезвычайно большое разнообразие автоматических систем, выполняющих те или иные функции по управлению самыми различными физическими процессами во всех областях техники.
В данной курсовой работе производится динамический синтез следящей системы автоматического управления.
В следящей системе выходная величина воспроизводит изменение входной величины, причем автоматическое устройство реагирует на рассогласование между выходной и входной величинами. Следящая система имеет обратную связь выхода со входом, которая по сути дела, служит для измерения результата действия системы. На входе системы производится вычитание входного сигнала и сигнала с датчика обратной связи. Величина рассогласования воздействует на промежуточные устройства, а через нее на управляемый объект. Система работает так, чтобы все время сводить к нулю рассогласование.
В состав системы входят нелинейности, именно поэтому по характеру внутренних динамических процессов ее относят к нелинейным системам. По протеканию процессов в системе ее относят к непрерывным, т. к. в каждом из звеньев непрерывному изменению входной величины во времени соответствует непрерывное изменение выходной величины.
Для того чтобы линеаризованная система отвечала требуемым показателям качества в установившемся режиме и переходном процессе, она подвергается синтезу, а именно, в нее включается регулятор, который реализует выбранный закон управления. В интересах простоты расчета сводим задачу к такой форме, чтобы максимально использовать методы исследования обыкновенных линейных систем, т. к. теория и различные прикладные методы для них наиболее полно разработаны.
1. Синтез линейной системы
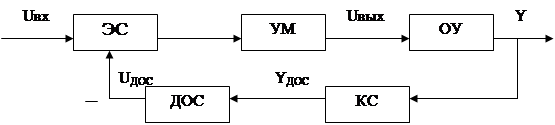
Рисунок 1.1 Функциональная схема замкнутой системы,
где
ЭС - элемент сравнения;
УМ – усилитель мощности;
ОУ – объект управления;
КС – кинематическая связь;
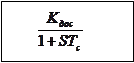
ДОС – датчик обратной связи;
Усилитель мощности предполагается безынерционным, но с ограниченной зоной линейности ±UВХmax. В кинематической связи между ОУ и ДОС присутствует люфт (зазор) величиной 2D (рис. 1.2.).
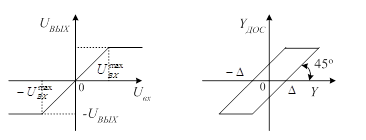
Рисунок 1.2. – Нелинейные характеристики элементов
Передаточные функции ОУ и ДОС известны:
![]() ,
,
где ![]()
![]() ,
,
где ![]()
Составим структурную схему исходной системы:
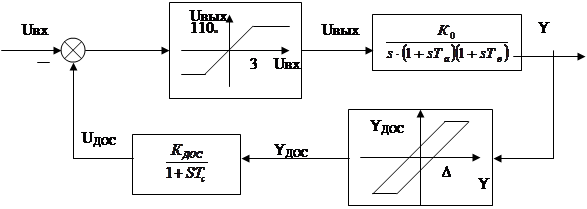
Рисунок 1.3 Структурная схема исходной системы
Для линеаризации системы пренебрегаем наличием нелинейных эффектов, то есть, считаем, что:
- усилитель мощности имеет неограниченную зону линейности
- зазор (люфт) в кинематической связи "выход системы – датчик обратной связи" отсутствует и коэффициент передачи равен единице
Усилитель мощности, имея неограниченную зону линейности, будет иметь передаточную функцию вида:
![]() ,
,
где КУМ – коэффициент передачи УМ.
Максимально выходное напряжение усилителя 110В, а зона нелинейности усилителя мощности по входу ±3В.
![]()
Тогда получим следующую структурную схему линеаризованной системы.
|
 |
||||||
|
|
||||||
![]()
![]()
![]()
![]()
![]()
![]()
|
|
|

Рисунок 1.4 Структурная схема линеаризованной системы
По критерию Гурвица проверим устойчивость замкнутой системы.
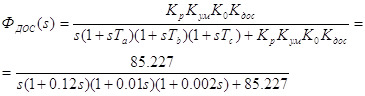
Передаточная функция замкнутой системы имеет вид:
![]()
![]()
![]() (1.1)
(1.1)
Запишем характеристическое уравнение замкнутой системы:
![]()
![]()
Необходимым условием устойчивости системы является одинаковость знака всех коэффициентов. Данное условие выполняется. Достаточным условием является положительность определителей Гурвица. Т.к. система 4 порядка, то следует проверить знак ∆3.
![]()
![]()
![]() (В)
(В)
Следовательно, замкнутая система устойчива.
Проверим, удовлетворяет ли система требованиям ТЗ.
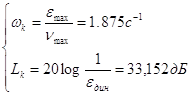
Т.к. в ТЗ оговариваются только максимальная скорость νmax и максимальное ускорение εmax, то следует перейти к эквивалентному гармоническому сигналу вида:
![]()
![]()
![]() с-1
с-1
![]()
![]()
Амплитуду ошибки найдем по модулю передаточной функции по ошибке.
![]() ,
,
![]() ,
,
где ![]() - частотная передаточная
функция разомкнутой системы.
- частотная передаточная
функция разомкнутой системы.
Так как ![]() , то справедливо соотношение
, то справедливо соотношение
![]() .
.
Поэтому ![]()
![]()
Тогда, модуль частотной передаточной функции:
![]() (1.2)
(1.2)
Относительную динамическую ошибку системы определим по формуле:
![]()
Подставляя
значение ωk в формулу, получим ![]()
Тогда находим
![]()
Относительная динамическая ошибка системы 25,4%, следовательно, система не удовлетворяет требованиям ТЗ.
Проверим,
удовлетворяет ли система требованиям ТЗ в переходном режиме, т.е. ![]()
Для этого нужно построить график переходной характеристики по выходу ДОС.
![]()
![]()
Для построения используем программный пакет MathCad
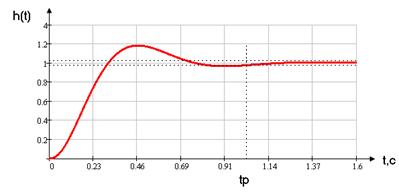
Рисунок 1.5 Переходная характеристика по выходу ДОС
Для определения перерегулирования (s) воспользуемся формулой:
![]()
![]()
Тогда ![]()
Т.е. получили, что перерегулирование удовлетворяет требованиям ТЗ.
Теперь найдем
время регулирования (tp). Для этого строим “коридор”, равный ±0,022![]()
Из рисунка видно, что tp=1,04с
Т.е. время регулирования не удовлетворяет требованиям ТЗ и данную систему следует откорректировать.
1.2 Анализ системы с пропорциональным регулятором
1.2.1 Структурная схема линеаризованной системы с пропорциональным регулятором
Пропорциональный регулятор реализует простейший линейный закон управления, при котором управляющий сигнал, подаваемый на вход объекта управления, представляет собой усиленный по величине и по мощности сигнал ошибки (рассогласования). В системах с невысокими требованиями такой закон иногда может обеспечить приемлемое качество регулирования и всегда полезно узнать, не относится ли к ним и наша система.
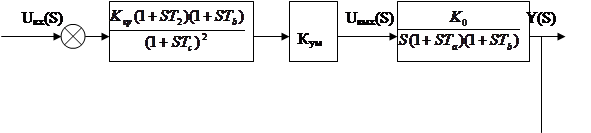
Cоставим структурную схему с пропорциональным регулятором:
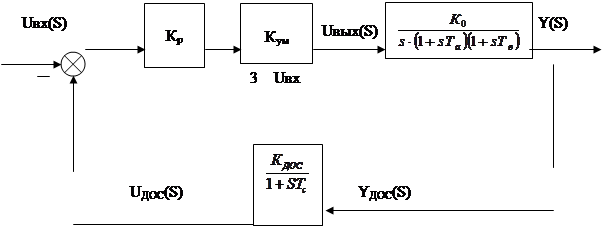
Рисунок 1.6 Структурная схема с пропорциональным регулятором
В установившемся режиме заданную точность обеспечивает низкочастотный участок. Проще всего оценить точность системы по ее реакции на гармонический входной сигнал.
![]() ,
,
Из пункта 1.1
![]()
Для того, чтобы входное воздействие воспроизводилось с ошибкой, не превышающей em, ЛАХ системы должна проходить не ниже контрольной точки Ak c координатами:
(1.3)
Построим запретную область (ЗО)
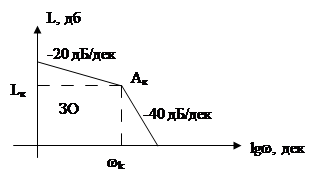
Рисунок 1.7 Запретная область
Определим минимальный коэффициент усиления разомкнутой системы [1, § 12.6]с пропорциональным регулятором, учитывая
![]() , где εm– относительная ошибка
системы
, где εm– относительная ошибка
системы
![]() с-1
с-1
Отсюда, коэффициент усиления пропорционального регулятора:
![]()
1.2.2 Проверка устойчивости замкнутой системы
Для проверки устойчивости замкнутой системы воспользуемся алгебраическим критерием Гурвица. [1, § 6.2]
Запишем характеристическое уравнение системы:
![]()
Т.к. система 4 порядка, то достаточно определить D3
![]()
![]()
Т.к. определитель больше нуля и все коэффициенты положительны, то замкнутая система с пропорциональным регулятором устойчива.
Теперь проверим систему по критерию Найквиста: [1, § 6.5] анализируем разомкнутую систему, а вывод делаем об устойчивости замкнутой системы.
Передаточная функция разомкнутой системы имеет вид:

Запишем характеристическое уравнение разомкнутой системы:
![]()
Все корни характеристического уравнения левые, кроме одного нулевого. Если разомкнутая система на границе устойчивости, то для устойчивости замкнутой системы необходимо и достаточно, чтобы годограф Найквиста, дополненный на участке разрыва дугой бесконечно большого радиуса, не охватывал особую точку с координатами (-1;j0).
![]()
Выделим действительную и мнимую часть:
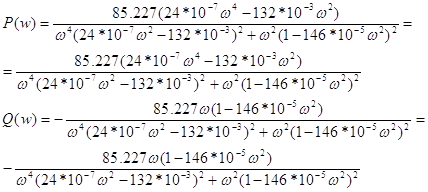
(1.5)
Будем изменять значения w от 0 до ¥ и находить соответствующие значения Р и Q.
Таблица 1.1
| w | P | Q |
| 0 | -11.25 | -¥ |
| 234.5 | 0 |
4,584*10-3 |
| 26.2 | -0.95 | 0 |
| ¥ | 0 | 0 |
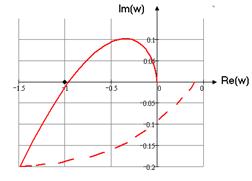
Рисунок 1.8 Годограф Найквиста
Из рисунка видно, что замкнутая система устойчива.
Проверим устойчивость замкнутой системы по логарифмическим частотным характеристикам.
Построим логарифмическую амплитудную частотную характеристику (ЛАЧХ) и логарифмическую фазовую частотную характеристику (ЛФЧХ).
[1, § 4.4]
Определим модуль частотной передаточной функции для разомкнутой системы:
![]() ;
;
 (1.7)
(1.7)
Определим L(w) и ![]()
![]() ;
;
 ;
;
![]()
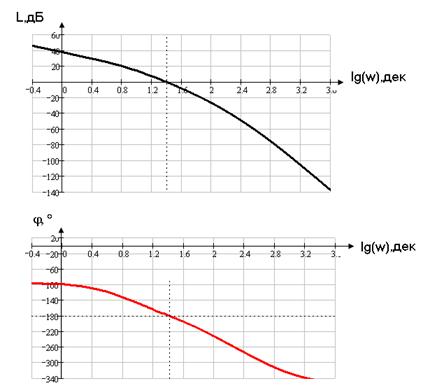
Рисунок 1.9 ЛАЧХ и ЛФЧХ системы с регулятором
Видно, что точка пересечения ЛФЧХ с линией -180о лежит немного правее точки пересечения ЛАЧХ с осью абсцисс. Следовательно, замкнутая система устойчива.
Проверим систему на устойчивость по критерию Михайлова. [1, § 6.3]
Для устойчивости системы необходимо и достаточно, чтобы годограф Михайлова начинался на вещественной положительной полуоси и при увеличении частоты последовательно проходил число четвертей, соответствующее порядку системы (нигде не обращаясь в 0).
Функция Михайлова для нашей системы:
![]()
Выделим вещественную и мнимую части:
![]() ;
;
![]()
Построим годограф Михайлова по следующим значениям:
Таблица 1.2
|
w, |
X(w) |
Y(w) |
| 0 | 85,227 | 0 |
| 25,6 | 0 | 1,105 |
| 26,2 | -4,252 | 0 |
| 233,1 | 0 |
-1,8259∙104 |
|
|
∞ | -∞ |

Рисунок 1.10 Годограф Михайлова для малых и больших частот соответственно
Следовательно, система устойчива.
Частота среза разомкнутой и замкнутой системы, запасы устойчивости, критический коэффициент усиления, прямые показатели качества и косвенный показатель качества
Частота среза – это частота, в которой ЛАЧХ системы пересекает ось абсцисс. Определим ее по графику ЛАЧХ (рисунок 1.9):
L(w)=0 при w=25.59 c-1
Критическая частота(wkp) – частота, при которой фазовая характеристика пересекает уровень -1800.
wkp=1,418 с-1
Запасы устойчивости определим по формулам:
![]() – запас устойчивости по
амплитуде,
– запас устойчивости по
амплитуде,
![]() –запас устойчивости по
фазе
–запас устойчивости по
фазе
Получаем:
Определим критический коэффициент усиления системы Kkp по критерию Михайлова.
Критический коэффициент усиления – такое значение Kp, при котором замкнутая система находится на границе устойчивости.
Если система находится на границе устойчивости, то левая часть характеристического уравнения равна 0.
![]()
Откуда вытекают два равенства:
![]()
Следовательно, годограф Михайлова должен проходить через начало координат.
Запишем функцию Михайлова:

Выделим вещественную и мнимую части и приравняем их к нулю:
 ;
;
Из уравнения Y(w)=0 находим w:
Подставляем это значение в уравнение X(w)=0 и находим критический коэффициент усиления Kkp

Прямые
показатели качества системы ![]() и tp определим по графику переходной
характеристики замкнутой системы с пропорциональным регулятором по выходу ДОС. [приложение 2]
и tp определим по графику переходной
характеристики замкнутой системы с пропорциональным регулятором по выходу ДОС. [приложение 2]

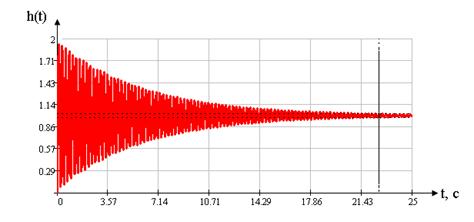
Рисунок 1.11 График переходной характеристики замкнутой системы по выходу ДОС
По графику находим:
hmax=1,95
![]() = 1
= 1
Найдем
перерегулирование ![]()
Для
определения tp построим “коридор” равный ![]() .
.
tp=22,72 с.
Показатель колебательности определяется по АЧХ замкнутой системы.
Запишем передаточную функцию замкнутой системы по выходу ДОС
 (1.8)
(1.8)
Преобразуем и выделим вещественную и мнимую части:
![]() ;
;
![]() .
.
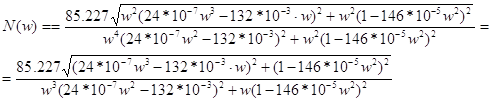
Запишем модуль частотной передаточной функции по выходу ДОС:
 (1.9)
(1.9)
По формуле (1.9) построим АЧХ замкнутой системы
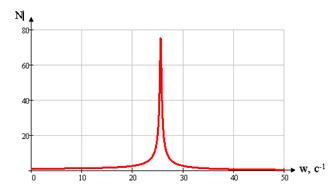
Рисунок 1.12 АЧХ замкнутой системы по выходу ДОС
Показатель колебательности определим по формуле:
![]() ,
,
где ![]() максимальное значение
ординаты АЧХ замкнутой системы по выходу ДОС;
максимальное значение
ординаты АЧХ замкнутой системы по выходу ДОС;
N(0) – значение ординаты АЧХ при w=0.
По рисунку определяем:
![]() ; N(0)=1;
; N(0)=1;
Откуда находим: M=75,214
Анализ на соответствие системы с пропорциональным регулятором требованиям ТЗ
Проверим систему на требования по точности воспроизведения входного сигнала.
Относительную динамическую ошибку системы определим по формуле:
![]()
![]() ;
; ![]()
Передаточная функция разомкнутой системы:
![]()
Тогда, модуль частотной передаточной функции:

Подставляя
значение ωk в формулу для ![]() , находим
, находим ![]()
Относительная динамическая ошибка системы 2,5%, следовательно, система не удовлетворяет требованиям ТЗ.
Время
переходного процесса tp=22,72 с. и перерегулирование![]() , найденные ранее, не
удовлетворяют требованиям ТЗ.
, найденные ранее, не
удовлетворяют требованиям ТЗ.
При введении пропорционального регулятора прямые показатели качества не удовлетворяют требуемым.
При введении регулятора увеличился коэффициент усиления разомкнутой системы и время регулирования. Хотя величина ошибки уменьшилась, тем не менее, она не удовлетворяет требованиям ТЗ. В результате введения регулятора качество переходного процесса ухудшилось.
1.3 Синтез регулятора
Описание методики синтеза регулятора для одноконтурной следящей системы
Динамический синтез – направленный расчет, имеющий конечной целью отыскание рациональной структуры системы и установление оптимальных величин параметров отдельных ее элементов.
Более узкая цель синтеза – определение вида и параметров корректирующего устройства, которое нужно добавить к некоторой неизменяемой части системы, чтобы обеспечит требуемое качество системы в установившемся и переходном режимах.
Наиболее приемлемым для решения задачи динамического синтеза является метод логарифмических амплитудных характеристик (метод ЛАХ). [1, § 12.5] Стадии синтеза по методу ЛАХ включают:
1. построение располагаемой ЛАХ, т.е. ЛАХ исходной системы
2. построение желаемой ЛАХ системы, удовлетворяющей требованиям ТЗ
3. определение вида и параметров корректирующего устройства
4. проверочный расчет – моделирование СУ, позволяющее убедиться в том, что спроектированная система удовлетворяет всем требованиям ТЗ.
Построение исходной ЛАХ
Передаточная функция исходной разомкнутой системы:
![]() ;
;
Построим исходную асимптотическую ЛАХ.
![]()
![]() lg(wа)=0,921;
lg(wа)=0,921;
![]() lg(wв)=2;
lg(wв)=2;
![]() lg(wс)=2,699
lg(wс)=2,699
На оси lgw отмечаем lg–ы частот сопряжений.
Проводим низкочастотную асимптоту с наклоном -20дБ/дек до первой частоты
сопряжения wa. Эта асимптота пересекает ось L в точке ![]() . На частоте сопряжения эта
асимптота изменяет наклон до -40дБ/дек и проводится до wв. На частоте wв изменяем наклон до
-60дБ/дек и проводим асимптоту до wс. На частоте wс меняем наклон до -80
дБ/дек и проводим асимптоту.
. На частоте сопряжения эта
асимптота изменяет наклон до -40дБ/дек и проводится до wв. На частоте wв изменяем наклон до
-60дБ/дек и проводим асимптоту до wс. На частоте wс меняем наклон до -80
дБ/дек и проводим асимптоту.
Построенная исходная асимптотическая ЛАХ представлена на миллиметровке.
Построение желаемой ЛАХ
Желаемую ЛАХ условно разбивают на 3 участка:
1 участок – низкочастотный. Он отвечает за обеспечение требуемой точности системы в установившемся режиме. Чем в большем диапазоне частот он расположен, тем в большем диапазоне частот не происходит заметного ослабления входного сигнала.
2 участок – среднечастотный. Он отвечает за устойчивость и качество системы в переходном режиме (оценивается величиной запасов устойчивости, прямыми показателями качества - s, tр, косвенным показателем М). Этот участок характеризуется 2 параметрами: частотой среза wср и наклоном асимптоты, проходящей через частоту среза.
![]()
Традиционно наклон асимптоты берется равным -20дБ/дек, поскольку, чем больше наклон асимптоты, тем труднее обеспечить хорошие динамические свойства системы.
3 участок – высокочастотный. Лучше иметь возможно больший наклон высокочастотных асимптот, что уменьшит требуемую мощность используемых органов.
Построение низкочастотного участка
Низкочастотный участок строится с использованием требований к качеству системы в установившемся режиме.
Чтобы гармонический входной сигнал воспроизводился системой с ошибкой, не превышающей em, низкочастотный участок ЛАЧХ желаемой системы должен проходить выше контрольной точки Ак(wк, Lк)
Первые две асимптоты располагаются так, что через контрольную точку Ак проходит первая асимптота. При этом коэффициент усиления будет иметь минимальную возможную величину, равную предельному значению, что является благоприятным.
![]() с-1.
с-1.
Однако частота точки пересечения второй асимптоты с осью нуля децибел w0 будет значительно больше минимального. Это является нежелательным, т. к. вся ЛАХ будет сдвигаться в область высоких частот.
Таким образом, мы сдвигаем первую частоту сопряжения и совмещаем ее с частотой wа. Отсюда находим первую постоянную времени желаемой ЛАХ
![]() с
с
Для того, чтобы реальная ЛАХ не заходила в запретную область при w=wk, приподнимаем ЛАХ на 3 дБ.
Построение среднечастотного участка.
Среднечастотный
участок определяет устойчивость, запасы устойчивости и качество переходного
процесса. Данный участок характеризуется двумя параметрами: частотой среза ![]() и наклоном асимптоты. Чем
больше частота среза, тем выше быстродействие системы, тем меньше время регулирования
tp. Наиболее целесообразно
брать наклон асимптоты –20 дБ/дек, так как чем больше наклон асимптоты,
тем сложнее обеспечить хорошие динамические свойства системы.
и наклоном асимптоты. Чем
больше частота среза, тем выше быстродействие системы, тем меньше время регулирования
tp. Наиболее целесообразно
брать наклон асимптоты –20 дБ/дек, так как чем больше наклон асимптоты,
тем сложнее обеспечить хорошие динамические свойства системы.
Т.к. заданы
прямые показатели качества, то воспользуемся методом Солодовникова В.В. Для
нахождения ![]() используем готовые номограммы.
используем готовые номограммы.
![]() ;
;
![]()
Выбираем частоту среза
![]()
Чем больше wc, тем более быстродействующая будет система; чем меньше wc, тем проще корректирующее устройство.
Выбираем wc=0.9wп=![]()
На оси logw отмечаем точку, соответствующую частоте среза wc, и через нее проводим прямую с наклоном -20дБ/дек. Эта прямая будет среднечастотной асимптотой желаемой ЛАХ.
Избыток фаз определяем
в соответствии с заданным перерегулированием. Значение L1 находим из номограммы,
для ![]() ; L1=25дБ.
; L1=25дБ.
Среднечастотный участок проводим вправо до достижения L1=-25дБ. Это значение достигается при logw3>logwc дек. Поэтому совмещаем частоту w3 с частотой wс, для упрощения корректирующего устройства. Избыток фаз незначительно уменьшится, но это незначительно повлияет на перерегулирование системы.
Левая граница определяется сопряжением среднечастотного и низкочастотного участков. Из Рисунка видно, что сопряжение участков происходит при logw2=1,42 дек. Следовательно, частота сопряжения w2= 26,303с-1.
Высокочастотные асимптоты желаемой ЛАЧХ выполняем параллельными высокочастотным асимптотам ЛАЧХ исходной системы. То есть, на частоте wс наклон становится -80дБ/дек.
Желаемая ЛАХ представлена на миллиметровке.
Корректирующие звенья могут вводиться в систему различными способами: а) последовательно; б) параллельно; в) в виде местной обратной связи.
В данной работе КУ включается последовательно, т. к. в маломощных системах нецелесообразно применение корректирующих устройств, сложность моделей которых соизмерима со сложностью моделей всей системы. Простота - достоинство ПКУ. Но есть и недостаток – эффект коррекции уменьшается с течением времени эксплуатации системы, что связано с изменением элементов параметров системы из-за процессов старения и износа. Поэтому при использовании ПКУ предъявляются жесткие требования к стабильности параметров элементов системы.
Определим передаточную функцию корректирующего устройства последовательного типа по формуле:
![]()
Получим ПФ корректирующего устройства и определим параметры:

где ![]() ,
,
где ![]()
Структурная схема скорректированной системы примет вид
![]() _
_
 |
|||||||
|
|
||||||
![]()
![]() Рисунок 1.13 – Структурная схема скорректированной
системы
Рисунок 1.13 – Структурная схема скорректированной
системы
ЛАХ корректирующего устройства получается при вычитании исходной ЛАХ из желаемой (рисунок на миллиметровке).
![]()
Проверим, соответствует ли система с корректирующим устройством требованиям ТЗ.
Определим ошибку системы.
Относительную динамическую ошибку системы определим как в п. 1.1 по формуле:
![]()
Передаточная функция разомкнутой системы:
![]() (1.10)
(1.10)
Частотная передаточная функция разомкнутой системы:

Тогда, модуль частотной передаточной функции:
![]()
Подставляя
значение ωk в формулу для ![]() , находим
, находим ![]()
Относительная динамическая ошибка системы 1,6%, следовательно, скорректированная система удовлетворяет требованиям ТЗ.
Рассмотрим,
удовлетворяет ли исходная система требованию по качеству переходного процесса:
время регулирования tp- не более 0.25 с, перерегулирование ![]() - не более 20%.
- не более 20%.
Для проверки
величин ![]() и tp построим график
переходной характеристики исходной системы по выходу ДОС:
и tp построим график
переходной характеристики исходной системы по выходу ДОС:
![]() ,
,
где ![]() – передаточная функция замкнутой
системы по выходу ДОС.
– передаточная функция замкнутой
системы по выходу ДОС.
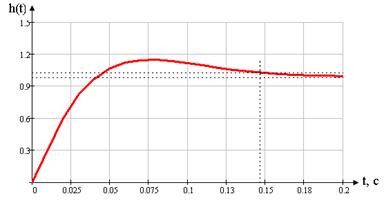
Рисунок 1.14 – График переходной характеристики
![]() ,
,
где hmax=1,188 - максимальное значение регулируемой величины;
![]() =1- установившееся значение
регулируемой величины в результате завершения переходного процесса.
=1- установившееся значение
регулируемой величины в результате завершения переходного процесса.
Перерегулирование скорректированной системы удовлетворяет ТЗ.
Определим время переходного процесса tp:
построив
“коридор” с величину ![]() , из Рисунка 1.14
определяем, что tp=0.147 с.
, из Рисунка 1.14
определяем, что tp=0.147 с.
Временя регулирования tp удовлетворяет требованию ТЗ.
1.4 Анализ скорректированной системы в частотной области
1.4.1 Рассчитаем и построим ЛАЧХ и ЛФЧХ скорректированной разомкнутой системы
Используем передаточную функцию разомкнутой системы (1.10)
![]()
Для получения частотной передаточной функции заменим S на jw и преобразуем

![]()
Вещественная и мнимая части соответственно:
![]() (1.11)
(1.11) ![]() ; (1.12)
; (1.12)
Тогда

![]() .
.
ЛАЧХ и ЛФЧХ разомкнутой системы представлены ниже.
ЛАЧХ скорректированной системы сместилась вправо, следовательно, необходимые требования по точности выполняются, запасы устойчивости увеличились по сравнению с системой с пропорциональным регулятором.
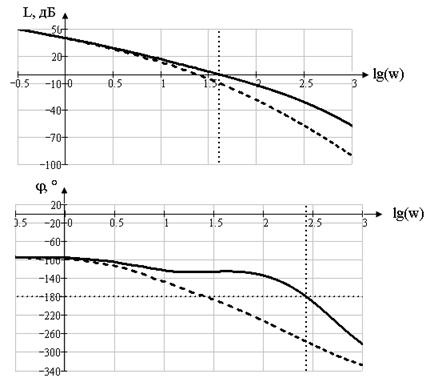
–– ЛАЧХ и ЛФЧХ скорректированной системы
- - ЛАЧХ и ЛФЧХ системы с пропорциональным регулятором
Рисунок 1.15 ЛАЧХ и ЛФЧХ систем
Построим график АФЧХ по имеющимся формулам (1.11) и (1.12) и сравним его с графиком системы с пропорциональным регулятором. Он представляет собой годограф Найквиста, поэтому сделаем ниже дополнительно выводы об устойчивости системы.
Составим таблицу, изменяя w от 0 до ∞:
Таблица 1.3
|
W, |
P(w) |
Q(w) |
| 0 | -10,604 | -∞ |
| 852,2 | 0 |
5,806*10-3 |
| 274,2 | -0,094 | 0 |
|
|
0 | 0 |
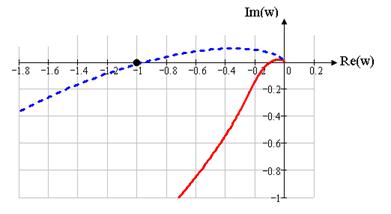
–– годограф скорректированной системы
- - годограф системы с пропорциональным регулятором
Рисунок 1.16 – Годограф Найквиста
Характеристическое уравнение имеет вид:
![]()
Все корни характеристического уравнения, кроме одного нулевого, левые, следовательно, разомкнутая система на границе устойчивости. Для устойчивости замкнутой системы необходимо и достаточно, чтобы годограф Найквиста, дополненный на участке разрыва дугой бесконечно большого радиуса, не охватывал особу точку (-1; j0). Данное условие выполняется, значит, замкнутая система устойчива.
Построим годограф Михайлова для системы.
Передаточная функция замкнутой системы:
 (1.13)
(1.13)
Функция Михайлова имеет вид:
![]() (1.14)
(1.14)
Выполним замену S на jw и выделим вещественную и мнимую части соответственно.
![]() .
.
![]() ;
;
Найдем значения X(w) и Y(w), изменяя при этом w от 0 до ∞:
Таблица 1.4
|
w, |
X(w) |
Y(w) |
| 0 | 85.227 | 0 |
| 26.125 | 0 | 114.613 |
| 79.717 | -648.966 | 0 |
| 275.355 | 0 | -13120 |
| 816.259 |
6.473*106 |
0 |
|
|
|
|

–– скорректированной системы
- - системы с пропорциональным регулятором
Рисунок 1.17 годограф Михайлова для замкнутой системы
Годограф
Михайлова начинается на вещественной положительной оси и при изменении частоты w от 0 до +![]() последовательно проходит 5
квадрантов против часовой стрелки, нигде не обращаясь в ноль. Это
свидетельствует об устойчивости замкнутой системы.
последовательно проходит 5
квадрантов против часовой стрелки, нигде не обращаясь в ноль. Это
свидетельствует об устойчивости замкнутой системы.
1.4.2 АЧХ “вход- выход системы”, “вход- выход ДОС”, “вход- выход УМ”
Рассчитаем и построим для замкнутой системы АЧХ “вход- выход системы”. Для этого воспользуемся передаточной функцией замкнутой системы (1.13). Заменим s на jw и преобразуем данное выражение:
![]()
![]()
![]()
Выделим вещественную и мнимую части соответственно:
![]()
![]()
Находим
 (1.15)
(1.15)
График АЧХ “вход- выход системы” представлен ниже.
Рассчитаем и построим АЧХ “вход- выход ДОС”. Запишем передаточную функцию замкнутой системы по выходу ДОС, которая имеет вид:
![]()
Преобразуем данное выражение:
![]()
![]()
![]()
Вещественная и мнимая части соответственно:
![]() (1.16)
(1.16)
![]()
Получим модуль передаточной функции замкнутой системы по выходу ДОС:
![]()
![]()
(1.17)
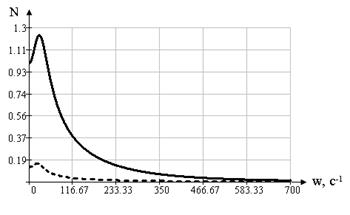
––– АЧХ «вход- выход ДОС»,
- - - АЧХ «вход- выход системы».
Рисунок 1.18 АЧХ
Рассчитаем и построим АЧХ “вход- выход УМ ”. Передаточная функция замкнутой системы по выходу УМ имеет вид:
![]()
![]() (1.18)
(1.18)
Вещественная и мнимая части соответственно:
![]()
![]()
Модуль передаточной функции замкнутой системы по выходу УМ:
![]()
![]()
![]()
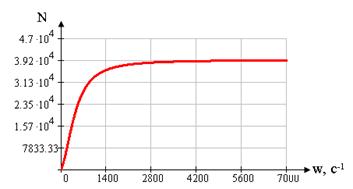
Рисунок 1.19 АЧХ вход-выход УМ
1.4.3 Частота среза разомкнутой системы, запасы устойчивости, критический коэффициент усиления, показатель колебательности
Частота среза и запасы устойчивости разомкнутой системы определяются по ЛАЧХ и ЛФЧХ. Определим их из рисунка 1.15
ЛАЧХ пересекает ось в точке lg(w)=1.614 дек. Тогда wср=41.072 с-1
ЛФЧХ пересекает уровень -180° при lg(w)=2.438 дек. Тогда wкр=274.35 с-1
Запас устойчивости по амплитуде найдем по годографу Найквиста:
![]()
Где hзап- расстояние до точки пересечения годографа Найквиста с действительной осью. (рис. 1.16)
![]() дБ
дБ
Запас устойчивости по фазе определим по рисунку 1.15:
φзап=φ(wcp)+1800
φзап=54,7330
Критический коэффициент найдем с использованием критерия Гурвица:
Характеристическое уравнение замкнутой системы имеет вид:
![]() (3.1)
(3.1)
Тогда оставим переменным параметр: K.
Получим следующие коэффициенты:
|
|
|
|
|
|
|
|
|
|
|
|
Для нахождения системы на границе устойчивости должны выполняться следующие условия:
1) одинаковость знака всех коэффициентов
2) для системы 5 порядка определитель D4=0
Решая уравнение в пакете MathCad получим следующие результаты:
![]()
Показатель колебательности определим по формуле:
![]() ,
,
![]() и N(0) находим по АЧХ замкнутой
системы по выходу ДОС
и N(0) находим по АЧХ замкнутой
системы по выходу ДОС
N(0)=1
Nmax=1.239,
Следовательно![]() .
.
Сравним результаты с результатами, полученными в пункте 1.2.3
Таблица 1.5 – Сравнительная характеристика полученных результатов
|
Lзап, дБ |
|
Ккр |
М |
|
tp, с |
|
| С регулятором | 0,409 | 0,75 | 93,3 | 75,214 | 95 | 22,72 |
| С коррекцией | 10,6 | 54,733 | 431 | 1.239 | 18,8 | 0,147 |
1.4.4 Оценки прямых показателей качества
Оценим σ и tp по вещественной частотной характеристике системы.
Построим вещественную частотную характеристику (ВЧХ) “вход – выход ДОС”. Для этого используем выражение (1.16).
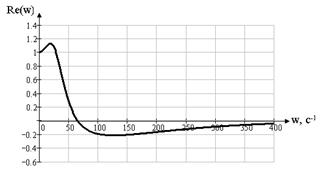
Рисунок 1.20 ВЧХ вход – выход ДОС
Склонность системы к колебаниям тем больше, чем выше пик у вещественной характеристики.
Оценим σ по формуле:
![]() ,
,
где ![]() максимальное значение ВЧХ;
максимальное значение ВЧХ;
![]() минимальное значение ВЧХ;
минимальное значение ВЧХ;
P(0)- значение ВЧХ при w=0.

Подставляем
значения и находим: ![]() .
.
tp оценим по формуле: ![]()
С помощью трассировки определили wn= 65,5 c-1.
Следовательно tp>0.048c-1.
ЛЧХ “вход- выход ДОС”
Для построения найдем L(w), используя выражение (1.15):
![]()
ЛФЧХ “вход- выход ДОС” построим по формуле
![]() Подставляя ранее полученные выражения Q(w) и P(w) (1.16), получим
Подставляя ранее полученные выражения Q(w) и P(w) (1.16), получим

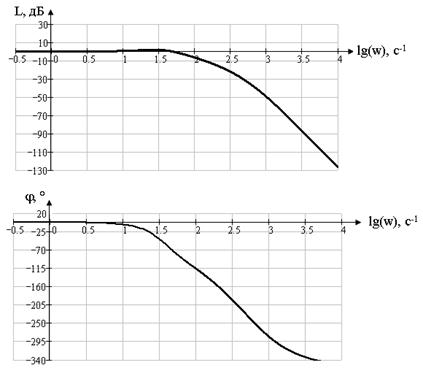
Рисунок 1.21 ЛАЧХ и ЛФЧХ вход- выход ДОС
Найдем нули и полюса замкнутой системы “вход- выход ДОС” и изобразим их на комплексной плоскости.
Корни полинома числителя называют нулями передаточной функции, а корни полинома знаменателя – полюсами.
![]()
Найдем их с помощью пакета MathCad [приложение 1].
Таблица 1.6– Нули и полюса замкнутой системы «вход- выход ДОС»
| нули | -26.316 | -500 | |||
| полюса | -610.77+159.74j | -610.77-159.74j | -234.44 |
-26.175,89-j25.657 |
-26.175+j25.657 |
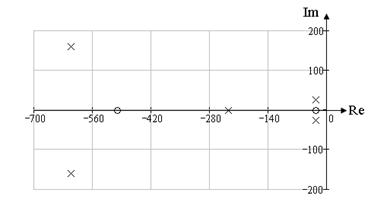
Рисунок 1.22 Нули и полюса на комплексной плоскости
Вычислим корневые оценки прямых показателей качества [1.§ 8.6].
Степень устойчивости η – это расстояние от мнимой оси до наиболее близко расположенного к ней полюса.
Ближайшим к
мнимой оси является вещественный полюс, значит η – апериодическая
степень устойчивости. ![]() .
.
Ближайшие к мнимой оси полюса называются доминирующими.
Доминирующие полюса дают составляющей переходного процесса затухание наиболее медленно. Поэтому по η можно получить оценку времени регулирования:
![]()
Колебательность
![]() ,
,
где β– мнимая часть, α– вещественная часть доминирующих комплексно-сопряженных полюсов.
Доминирующие комплексно-сопряженные полюса: -26.175± j25,657.
![]()
Удаленные от начала координат полюса увеличивают перерегулирование
![]() Получаем
Получаем ![]()
Определим влияние нулей на оценки прямых показателей качества.
Близко расположенные нуль и полюс взаимно компенсируются. Скомпенсированный нулем полюс не участвует в оценке прямых показателей качества.
![]() ,
,
где λi – вещественная часть полюса;
nj - вещественная часть нуля.
В данной работе близко расположенные нули и полюса отсутствуют.
Оценка точности системы
Точность СУ оценивается в статическом режиме – в режиме, соответствующем окончанию переходного процесса (t→¥).
Анализ точности начинается с передаточной функции замкнутой системы по ошибке ФЕ(s). [1, § 8.3]
Эту передаточную функцию разлагаем в ряд:
![]()
Где сi – коэффициенты ошибки.
Найдем выражения для вычисления первых двух коэффициентов ошибки и занесем в табличку.
Таблица 1.7
|
С0 |
С1 |
|
| выражение для ошибки | 0 |
|
| Значение ошибки | 0 | 0.008 |
Рассчитаем установившуюся ошибку системы для заданных в ТЗ сигналов.
![]()
Тогда для
входного сигнала ![]() получаем
установившуюся ошибку:
получаем
установившуюся ошибку: ![]()
Для входного
сигнала ![]() с постоянной скоростью, где
А=6В/с, установившаяся ошибка:
с постоянной скоростью, где
А=6В/с, установившаяся ошибка:
![]() В
В
Установившуюся ошибку для
гармонического сигнала вида ![]() рассчитаем
по следующей формуле:
рассчитаем
по следующей формуле:
![]() , (1.19)
, (1.19)
где ![]() - заданная частота,
- заданная частота,
![]() -модуль частотной
передаточной функции по ошибке,
-модуль частотной
передаточной функции по ошибке,
А0=1В- амплитуда входного сигнала,
![]() - аргумент частотной
передаточной функции по ошибке.
- аргумент частотной
передаточной функции по ошибке.
![]() .
.
Поскольку
частота выходного сигнала (ошибки) совпадает с частотой входного сигнала,
найдем NE и φE на частоте ![]() .
.
Определим
частоту гармонического входного сигнала ![]() ,
для которой амплитуда установившихся колебаний на выходе усилителя мощности
равна 110В при амплитуде входного сигнала 1В.
,
для которой амплитуда установившихся колебаний на выходе усилителя мощности
равна 110В при амплитуде входного сигнала 1В.
![]() определим по графику АЧХ
“вход-выход УМ” (Рис. 1.19). Получаем, что w0=11,215.
определим по графику АЧХ
“вход-выход УМ” (Рис. 1.19). Получаем, что w0=11,215.
Найдем NE частотной передаточной функции по ошибке. Выделим вещественные и мнимые части:
![]()
![]()
![]()
Модуль частотной передаточной функции по ошибке:
![]()

N(w0)=0.1
Определим аргумент частотной передаточной функции по ошибке:
 ;
; ![]() .
.
Подставляя найденные значения в формулу (1.19) получим установившуюся ошибку при гармоническом входном сигнале:
![]()
2. Отработка типовых входных сигналов
Известно несколько способов расчета реакции системы на входные сигналы. В данной работе используем метод преобразований по Лапласу.
Запишем переходную функцию системы по выходу системы при входном воздействии X(t) = 1(t)
![]() – изображение по Лапласу
входного единичного сигнала.
– изображение по Лапласу
входного единичного сигнала.
Переходная функция h(t) определяется по формуле:
![]() (2.1)
(2.1)
Найдем переходную функцию по выходу системы:
 ; (2.2)
; (2.2)
Начальные и конечные значения переходной функции находятся по формулам:
![]() (2.3)
(2.3)
![]()
Начальное и конечное значение переходной функции по выходу системы:
 (2.4)
(2.4)
 (2.5)
(2.5)
Т.е. конечное значение переходной характеристики системы по выходу системы зависит только от коэффициентов усиления звеньев.
Найдем переходную функцию по выходу ДОС:
 ; (2.6)
; (2.6)
По формулам (2.3) найдем начальное и конечное значение переходной функции по выходу ДОС:
 (2.7)
(2.7)
 (2.8)
(2.8)
Т.е. переходная характеристика системы по выходу ДОС не зависит от параметров системы.
Реакция системы представлена на Рисунке 1.14 (п. 1.3.5).
Найдем переходную функцию по выходу УМ [приложение 2]:
 ; (2.9)
; (2.9)
По формулам (2.3) найдем начальное и конечное значение переходной функции по выходу системы:
 (2.10)
(2.10)
 (2.11)
(2.11)
Т.е. начальное значение переходной характеристики системы по выходу УМ зависит не только от коэффициентов УМ и КУ системы, а также от частот сопряжений w2 и wb.
2.1.2 Переходные характеристики системы
По формуле (2.2) построим переходный процесс по выходу системы.
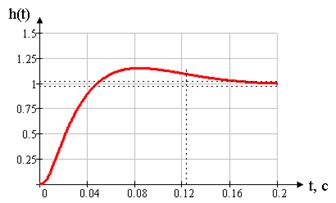
Рисунок 2.1 Переходная
характеристика по выходу системы
hmax=0.105, hуст=0,087, тогда
![]() ,
,
Определим
время переходного процесса tpпостроив “коридор”, равный ![]() , из Рисунка 2.1
определяем, что tp=0.151с
, из Рисунка 2.1
определяем, что tp=0.151с
Перерегулирование и время переходного процесса по выходу ДОС соответственно:
![]() , tp=0.147 с.
, tp=0.147 с.
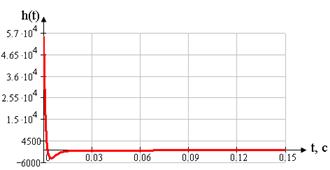
Рисунок 2.4 Переходная характеристика системы по выходу УМ
2.1.3 Сравнение переходных характеристик
Определенные по переходным характеристикам прямые показатели качества, для сравнения представим в табл. 2.2 вместе с оценками, полученными в пункте 1.4.4.
Таблица 2.2
| по выходу системы | по выходу ДОС | Оценки по ВЧХ | Корневые оценки | |
| s,% | 19,5 | 18,8 | 26,704 | 4,053 |
|
tP, с |
0,151 | 0,147 | 0.048 | 0,146 |
По данным таблицы можно сделать вывод, что постоянная времени датчика обратной связи незначительно влияет на качество переходного процесса.
Показатели качества, полученные по переходным характеристикам, по ВЧХ и корневым оценкам, отличаются. Это объясняется тем, что получаем оценку, а не само значение.
Запишем все значения в таблицу для наглядности.
Таблица 2.3
| графически | аналитически | ||
| вход–выход системы | h(0) | 0 | 0 |
| h(∞) | 0,087 | 0,087 | |
| вход–выход ДОС | h(0) | 0 | 0 |
| h(∞) | 1 | 1 | |
| вход-выход УМ | h(0) | 55472,575 | 55472,575 |
| (∞) | 0 | 0 |
Сравнивая начальные и конечные значения переходных характеристик по всем выходам, определенные аналитически по передаточным функциям в пункте 2.1.1, с их расчетными значениями, мы видим, что они совпадают.
2.1.4 Величина ступенчатого сигнала
Определим величину Х0 ступенчатого сигнала, при котором система работает в зоне линейности усилителя мощности. Допустимая величина входного сигнала ограничена напряжением насыщения усилителя мощности, равным 110 В. Наибольшее значение выхода УМ достигается при t = 0. Допустимую величину "ступеньки" Х0 определим из пропорции:
![]() ;
;
Подставляя
значения, получаем![]() .
.
Величина Х0 = 0,002В.
2.2 Сигнал с постоянной скоростью
Рассчитаем и построим график ошибки системы при отработке входного сигнала с постоянной скоростью, вида:
X(t) = А×t, где А=6 В/с.
Изображение по Лапласу
сигнала: ![]() ,
,
Переходная функция по ошибке примет вид:
![]()
 ;
;
––– график ошибки при отработке входного сигнала с
постоянной скоростью;
![]() график вынужденной (установившейся)
составляющей ошибки
график вынужденной (установившейся)
составляющей ошибки
при отработке входного сигнала с постоянной скоростью.
Рисунок 2.5
Интервал времени, на котором практически (с точностью 5%) устанавливается вынужденный режим определим по рисунку 2.5.
Таким образом, tв=0.13 с.
Время, за которое практически устанавливается вынужденный режим, tв=0.13с меньше, чем время регулирования tp=0.147c.
2.3 Гармонический сигнал
2.3.4 Определение частоты гармонического сигнала
Определим частоту гармонического сигнала по АЧХ замкнутой системы по выходу УМ (п. 1.4.2).
Из Рис. 1.19
следует, что значение частоты![]() 0
=11.823-1.
0
=11.823-1.
Таким образом, частота гармонического входного сигнала, при которой амплитуда установившихся колебаний на выходе УМ равна 110В, при амплитуде входного 1В, равна 11.823-1.
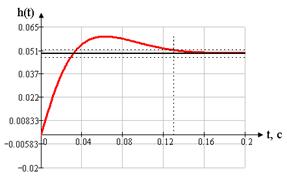
2.3.2 График реакции системы по выходу ДОС при подаче гармонического сигнала на вход системы
Входной сигнал и его изображение по Лапласу имеют вид:
X(t) = sin(w0×t), (2.11)
![]() .
.
Реакцию системы на гармонический входной сигнал по выходу ДОС определим по формуле:
![]()

На Рисунке 2.6 представлен график реакции на входное гармоническое воздействие по выходу ДОС.
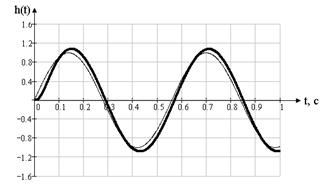
![]() реакция по выходу ДОС
реакция по выходу ДОС
––––– входное гармоническое воздействие
Рисунок 2.6
2.3.3 Амплитудно-фазовые искажения отработки входного сигнала
Амплитудные искажения отработки входного сигнала определим по формуле:
где ![]() – максимальное значение
амплитуды выходного сигнала;
– максимальное значение
амплитуды выходного сигнала;
![]() – максимальное значение
амплитуды входного сигнала;
– максимальное значение
амплитуды входного сигнала;
![]() и
и ![]() определим по графику
вынужденной составляющей сигнала по выходу ДОС (Рис. 2.6)
определим по графику
вынужденной составляющей сигнала по выходу ДОС (Рис. 2.6)
![]() =1,083,
=1,083, ![]() =1
=1
Подставляя
значения, получаем: 
Определим амплитудные искажения по ЛАЧХ разомкнутой системы на частоте w0.
По Рис. 1.21
на частоте w0=11,823с-1 ![]()
Фазовые искажения отработки входного сигнала определяются по формуле:
![]() .
.
где t = 0.011 с - временной сдвиг
между входным сигналом и сигналом ДОС, определено по Рис. 2.6. и ![]() – по ЛФЧХ (рис 1.21)
отличаются незначительно, что можно объяснить округлениями при вычислении.
– по ЛФЧХ (рис 1.21)
отличаются незначительно, что можно объяснить округлениями при вычислении.
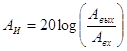
3. Область устойчивости
Рассчитаем и построим границу области устойчивости на плоскости параметров «постоянная времени корректирующего устройства Тa –коэффициент усиления разомкнутой системы К».
Построим область устойчивости c помощью критерия Гурвица.
Характеристическое уравнение замкнутой системы имеет вид:
 (3.1)
(3.1)
Тогда оставим переменными 2 параметра: K и Т2.
Получим следующие коэффициенты:
|
|
|
|
|
|
|
|
|
|
|
|
Для нахождения системы на границе устойчивости должны выполняться следующие условия:
3) одинаковость знака всех коэффициентов
4) для системы 5 порядка определитель D4=0
Решая уравнение в пакете MathCad, [приложение 3]получим следующий график:
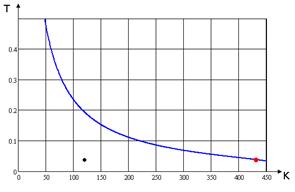
Рисунок 3.1 Область устойчивости
Точка Kкр, найденная в пункте 1.4.3 практически совпадает с точкой, полученной по графику. Значение коэффициента, соответствующее расчетным параметрам находится в зоне области устойчивости. Т.е. при данных параметрах система устойчива. Небольшая погрешность в расчетах возникает из-за округлений.
4. Анализ системы с учетом нелинейности
4.1 Определение автоколебаний в системе
Для определения возможности возникновения автоколебаний воспользуемся методом гармонической линеаризации. Суть метода заключается в замене нелинейного элемента эквивалентным линейным. Признак эквивалентности – одинаковость преобразования гармонического входного сигнала. Эквивалентный линейный элемент характеризуется эквивалентным комплексным коэффициентом усиления.
Переход к эквивалентному линейному элементу позволяет исследовать систему частотными методами (можно определить возможность возникновения в системе автоколебаний, а также их параметры).
В системе присутствует симметричная однозначная нелинейность типа “насыщение”.
Рисунок 4.1
![]() , где (4.1)
, где (4.1)
![]() эквивалентный комплексный
коэффициент усиления;
эквивалентный комплексный
коэффициент усиления;
А- амплитуда автоколебаний.
Для
нелинейности типа насыщения ![]() , а
, а
Рассчитаем ЭККУ нелинейного элемента с данными параметрами.

Xвых=f(Xвх)
![]()
(4.2)
Воспользуемся частотным методом анализа симметричных автоколебаний.
В замкнутой системе имеют место незатухающие колебания управляемой величины, при условии:
![]()
![]()
![]() - условие существования симметричных
автоколебаний
- условие существования симметричных
автоколебаний
На
комплексной плоскости строим ![]() . На
этой же плоскости по выражению
. На
этой же плоскости по выражению ![]() строится
годограф инверсного ЭККУ.
строится
годограф инверсного ЭККУ.
В системе возникнут автоколебания управляемой величины, если годограф Найквиста и годограф инверсного ЭККУ пересекутся.
Передаточная функция линейной части системы имеет вид:
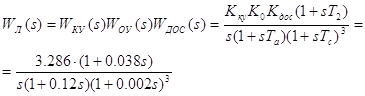
![]()
![]() ;
;
|
|
w, |
P(w) |
Q(w) |
| 1 | -0.285 | -3.252 |
| 10 | -0.122 | 0.189 |
| 100 | -0.0070 | -0.0073 |
|
|
0 | 0 |
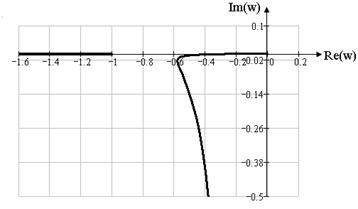
Рисунок 4.2
Из рисунка 4.2 видно, что годографы не имеют точек пересечения, следовательно, в системе отсутствуют автоколебания.
4.2 Влияние коэффициента усиления разомкнутой системы на условие возникновения автоколебаний
В замкнутой системе будут возникать автоколебания, если годограф Найквиста будет проходить через точку (-1;j0), т.е. система будет находиться на границе устойчивости. Граница устойчивости будет достигаться при коэффициенте усиления системы, равного критическому, т.е. при К=Ккр=431с-1.
4.3 Анализ абсолютной устойчивости положения равновесия системы по критерию Попова
Если замкнутая система состоит из устойчивой линейной части и одного безынерционного нелинейного элемента со статической характеристикой, расположенной в секторе от 0 до К, то достаточным условием устойчивости положения равновесия системы в начале координат является следующее:
![]() ,
,
где q- произвольное число, использованное для доказательства критерия
К-коэффициент наклона прямой, ограничивающей сектор расположения статической характеристики нелинейного элемента.
Преобразуем АФЧХ линейной части системы, домножив мнимую часть на w.
![]()
![]()
![]()
![]()
![]()
Формулировка критерия: для абсолютной устойчивости положения равновесия системы достаточно, чтобы годограф линейной преобразованной части системы располагался справа от прямой Попова
Т. к. линейная часть системы устойчива, то критерий Попова можно применять напрямую.
Вещественная и мнимая части преобразованной частотной передаточной функции имеют вид:
![]()
![]()
Таблица 4.2
|
w, |
P(w) |
Q(w) |
| 0 | -0,289 | -3,286 |
| 274.36 | -0.0026 | 0 |
| 852.16 | 0 | 0.135 |
|
|
0 | 0 |
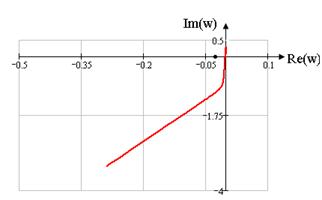
Рисунок 4.3
Из Рисунка
4.3 видно, что через точку ![]() нельзя
провести прямую, такую, что преобразованная АФЧХ лежала бы справа от этой
прямой.
нельзя
провести прямую, такую, что преобразованная АФЧХ лежала бы справа от этой
прямой.
Следовательно, для системы характерна абсолютная неустойчивость положения равновесия.
Заключение
В результате проведения синтеза была скорректирована система, удовлетворяющая требованиям технического задания. Соответствие приведено ниже в таблице.
Таблица
| Параметр | Техническое задание | Скорректированная система |
| Перерегулирование | не более 20% | 18,8% |
| Время регулирования | не более 0,25с | 0,147 |
Список использованной литературы
1. Бесекерский В.А., Попов Е.П. “Теория систем автоматического регулирования” — М.: Наука, 1972.
2. Зырянов Г.В., Кощеев А.А. “Динамический синтез систем автоматического управления”. Учебное пособие по выполнению курсовой работы.- Челябинск, 2001.
3. Павловская О.О. “Лекции по курсу ТАУ”
| Проектирование электропривода подач металлорежущего станка | |
|
Федеральное агентство по образованию Северо-Западный государственный заочный Технический Университет Кафедра автоматизации производственных процессов ... Для достижения заданных в техническом задании качественных показателей системы в замкнутый контур системы устанавливается пропорционально-интегро-дифференциальный регулятор (ПИД ... График переходного процесса системы с использованием PID-регулятора показан на рисунке 1 ниже. |
Раздел: Промышленность, производство Тип: курсовая работа |
| Машины, которые говорят и слушают | |
|
УДК 621.391 Рассмотрены современныэ тенденции развития систем автоматического распознавания и синтеза речевых сигналов. Освещены проблемы построения ... Смысл гомоморфной системы анализа становится более понятным, если учесть, что в частотной области речевой сигнал представляется произведением спектра сигнала возбуждения и ... Фактически сложность распознавания входного словаря V определяется наличием сходных эталонных поверхностных форы U^ выходного словаря W и частотой встречаемости зтих поверхностных ... |
Раздел: Рефераты по кибернетике Тип: реферат |
| Линейные автоматические системы регулирования | |
|
РОСАТОМ СЕВЕРСКАЯ ГОСУДАРСТВЕННАЯ ТЕХНОЛОГИЧЕСКАЯ АКАДЕМИЯ Кафедра Э и АФУ ЛИНЕЙНЫЕ АВТОМАТИЧЕСКИЕ СИСТЕМЫ РЕГУЛИРОВАНИЯ КУРСОВОЙ ПРОЕКТ ПОЯСНИТЕЛЬНАЯ ... 1) Имея передаточную функцию объекта (любого порядка с запаздыванием или без него) зададимся величиной , обеспечивающей требуемое качество переходного процесса в замкнутой системе ... Следующими этапами проекта являлось построение математической модели, которая формировалась из ранее выбранной передаточной функции второго порядка с запаздыванием, определение ... |
Раздел: Рефераты по экономике Тип: курсовая работа |
| Проектирование магистральной волоконно-оптической системы передачи с ... | |
|
Аннотация Дипломный проект посвящен вопросу проектирования магистральной волоконно-оптической системы передачи с повышенной пропускной способностью ... В случае, когда девиация (сдвиг) частоты велика, так что Ѭf>>B и полоса частот модулированного оптического сигнала составляет около 2Ѭf, частотную манипуляцию называют ... Интерфейсы входного и выходного сигналов, как правило, соответствуют стандартной скорости передачи, формату и уровням сигнала, так, например, вход 1.544 Мбит/с DS1 и выход 44.736 ... |
Раздел: Рефераты по коммуникации и связи Тип: дипломная работа |
| Расчет линии связи для системы телевидения | |
|
Содержание 1. Введение 1.1. Общее описание системы спутникового телевизионного вещания 1.2. Краткое описание параметров системы связи 1.3.Краткое ... Из параметров модуляции важнейшее значение при ЧМ имеет девиация частоты, при ФМ - число фаз несущей (кратность модуляции), а при передаче программ телевидения - также способ ... ПЧ (промежуточная частота) - термин, используемый для описания частоты сигналов на выходе понижающего преобразователя частоты (конвертора) или схемы смесителя (схемы изменения ... |
Раздел: Рефераты по коммуникации и связи Тип: курсовая работа |