Дипломная работа: Дослідження сервоприводу з урахуванням нелінійності
Міністерство освіти і науки України
ДИПЛОМНА РОБОТА
Дослідження сервоприводу з урахуванням нелінійності
2007 р
Вступ
Упровадження нової техніки в соціалістичне народне господарство базується на всі зростаючі механізації і автоматизації процесів управління машинами і апаратами. Особливо велике вживання автоматизація знаходить в сучасній авіаційній і ракетній техніці.
Запуск Радянським Союзом перших штучних супутників Землі космічних ракет, перші в світі польоти навкруги Землі на космічному кораблі радянських космонавтів Ю.А. Гагарина і Г.С. Титова показали блискучі успіхи в розвитку вітчизняної ракетної техніки, автоматики і систем управління. Системи автоматичного управління літальними апаратами по пристрою представляють складну комбінацію гіроскопічних, електронних, електромеханічних, газових і гідравлічних агрегатів і приводів. Гідравлічні приводи в цих системах частіше за все виконують одночасно функції підсилювачів потужності і виконавчих механізмів. За допомогою гідравлічних приводів можна досягти посилення сигналів управління по потужності в декілька тисяч раз і одержати зусилля, що розташовуються, на органах управління (кермі, площинах та ін.) в декілька тонн.
Гідравлічним приводом називають систему агрегатів і машин, що служить для передачі механічної енергії за допомогою рідини.
Основними елементами гідравлічного приводу є перетворювачі енергії – насоси і гідродвигуни.
Насосом називають гідравлічну машину, що перетворює механічну енергію приводного двигуна в енергію потоку рідини. Гідродвигуном називають машину, що перетворює енергію рідини в механічну енергію.
Гідравлічним приводом називають об'ємним (на відміну від гідродинамічного), якщо він складається з насосів і гідродвигунів об'ємного типу. Як механізми регулювання швидкості в гідроприводах стежачих систем, застосовують дросельні (золотникові) механізми і насоси змінної продуктивності.
1. Стан проблеми і постановка задач проектування
Нелінійності є в будь-якому реальному приводі, можуть істотно впливати на його динамічні властивості, зокрема на стійкість.
Цей вплив виявляється в наступному: привод, стійкий і має достатній запас стійкості в лінійному наближенні, може виявитися не стійким або не володіючим тим запасом стійкості, який очікується. Такий вплив надають частіше за все «петлеві нелінійності (люфт, гістерезис), але при деяких положеннях в структурі приводу до цього ж ефекту можуть привести і однозначні нелінійності, наприклад навіть такі, як зона нечутливості [1].
В приводі можуть з'явитися принципово нові типи руху, які не можуть існувати в лінійних системах і тому не можуть бути навіть якісно пояснені з позиції лінійної моделі. До таких рухів відносяться в першу чергу автоколивання. Автоколивання можуть викликати ті ж нелінійності, які викликають зменшення запасу стійкості. В одноконтурних системах – це петлеві нелінійності, в неодноконтурних – однозначні.
Допустимі або недопустимі автоколивання в реальній системі – питання дискусійне. Все залежить від їх параметрів, тобто від розмаху і частоти. Одне поза сумнівом, автоколивання не повинні порушувати вимоги по точності, отже, якщо їх і можна допустити, то тільки при таких, амплітудах, при яких викликана ними помилка сумісно з вимушеною помилкою, викликаною відтворенням всіх заданих законів управління, не виходить за межі допустимих.
Для достатньо повної думки про динамічні властивості проектованого приводу і його придатності для виконання доручених йому функцій потрібно розглянути і його. нелінійну модель. При цьому розгляді перед інженером виникають дві основні задачі: по-перше, зрозуміти, в чому може виявлятися вплив тієї або іншої нелінійності, зрозуміти фізику дії як окремої нелінійності, так і сукупності декількох нелінейностей і, по-друге, оцінити, кількісний вплив головних нелінейностей на стійкість і динамічну точність досліджуваної системи.
З огляду на те, що на нелінійну систему принцип суперпозиції не розповсюджується, строго кажучи, не можна розглядати вплив кожної нелінійності окремо і потім підсумовувати ефекти їх дії. Тому, здавалося б, потрібно розглядати вплив всіх нелінійностей спільно. Такий підхід пов'язаний із значними обчислювальними труднощами, які, правда, можуть бути подолані при використовуванні сучасних обчислювальних машин. Важливе інше, такий підхід не має сенсу, в усякому разі, на першому етапі проектування нелінійної системи, оскільки не дає корисної інформації про вплив кожної з нелінейностей на динамічні властивості, а отже, не може допомогти у виборі методів цілеспрямованої дії з метою забезпечення необхідних динамічних властивостей.
Частіше всього характер впливу нелінійності не змінюється при її дії в сукупності з іншими, тому має сенс розгляд і окремо взятих нелінейностей, і розумно вибраних комбінацій невеликого числа нелінейностей.
Розуміння впливу нелінейностей на динамічні властивості важливе і для правильного проектування лінійного варіанту – вибору структури, методів корекції і т. п., оскільки системи, еквівалентні по динамічних властивостях в лінійному плані, можуть виявитися зовсім не еквівалентними при обліку нелінейностей і при синтезі лінійної структури раціонально використовувати такі, у яких шкідливий вплив основних нелінейностей на динамічні властивості менше.
На нашу думку, найзручнішим математичним апаратом для досліджування сервоприводу (СП), в даній роботі досліджується елекрогідропривод (ЕГП) розглядається за допомогою методу гармонійної лінеаризації в інтерпретації, заснованого на використанні логарифмічних частотних характеристик нелінійної системи, що викладається нижче [1].
1.1 Структура сервоприводу
Сервопривід – частина системи стабілізації (СС), яка призначена для посилення командного сигналу і перетворення його електричної енергії в механічне переміщення. Переміщення залежно від практичного вживання може бути обертальним або поступальним. Таким чином, елекрогідропривод є виконавчим органом СС, що впливає на кермо виробу. Функціональна схема сервоприводу представлена на малюнку 1.1.
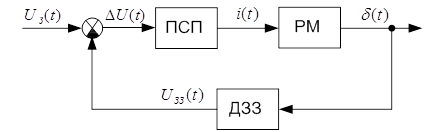
Малюнок 1.1 – Функціональна схема досліджуваної системи сервоприводу
Ця схема застосовується частіше всього на вітчизняних виробах.
ПСП – підсилювач сервоприводу;
РМ – рульова машинка (іноді рульовий агрегат для СС);
ДЗЗ – датчик зворотного зв'язку;
![]() – струм управління
рульової машинки;
– струм управління
рульової машинки;
![]() – струм зворотного
зв'язку;
– струм зворотного
зв'язку;
![]() – командний струм;
– командний струм;
![]() – результуючий струм,
сума струмів
– результуючий струм,
сума струмів ![]() (сумарний струм);
(сумарний струм);
![]() – поворот вихідного валу
або переміщення штока РМ.
– поворот вихідного валу
або переміщення штока РМ.
Іноді використовується схема, яка представлена на мал. 1.2.
Відмінність цієї схеми від попередньої в тому, що тут застосовується механічний зворотний зв'язок (ЗЗ). Такий ЗЗ здійснюється за допомогою важелів або за допомогою редуктора.
Рульова машинка із зворотним зв'язком утворює позиційний привод (ПП).
Така структурна схема використовується переважно на американських ракетах. Ми розглядатимемо вітчизняну схему. Розберемося, що представляють загалом елементи структурної схеми і їх передавальні функції.
1.2 Огляд літератури
Нелінійної називають систему, поведінка якої описується нелінійним рівнянням.
Всі реальні елементи, а отже, і системи, через такі явища, як сухе і в'язке тертя, насичення, нечутливість, гістерезис, пружність, адгезія та ін., є нелінійними. Як образно виразився Я.З. Ципкін, «лінійні системи – це невеликий острівець в безбережному океані нелінійних систем»
Тому теорію лінійних систем можна розглядати тільки як більш менш точну ідеалізацію реальних систем, що не охоплює всієї різноманітності реальних систем і що не враховує багатьох властивих їм явищ.
Нелінійні системи в порівнянні з лінійними володіють цілим рядом особливостей:
1) на відміну від лінійних в нелінійних системах несправедливий принцип комутативності, тобто від зміни порядку перетворення сигналу може змінитися результат, і не виконується принцип суперпозиції, тобто вихідний сигнал не можна розглядати як суму реакцій системи на окремі складові вхідного сигналу;
2) форма сигналів в нелінійній системі залежить не тільки від форми вхідного сигналу, але і від його величини. Крім того, характер процесів залежить від величини початкових умов;
3) в нелінійних системах можливий режим автоколивань, тобто за відсутності у вхідному сигналі гармонійної складової в системі можуть виникнути незгасаючі коливання;
4) стійкість рівноважного стану лінійної системи визначається її структурою і значеннями параметрів (коефіцієнтів передачі, постійних часу і т. п.). Нелінійна система може мати нескінченну безліч станів стійкої рівноваги і декілька стійких режимів автоколивань. Сталий стан рівноваги або коливальний режим залежать не тільки від структури і параметрів системи, але і від величини вхідного сигналу і початкових умов;
5) в сталому режимі в лінійних системах частота вихідного сигналу співпадає з частотою вхідного сигналу. В нелінійних системах вихідний сигнал може містити складові, частота яких вище або нижче за частоту вхідного сигналу, тобто гармоніки і субгармоники;
6) частотні характеристики нелінійних систем залежать не тільки від її структури і параметрів, але і від величини вхідного сигналу і початкових умов;
7) частотні характеристики нелінійних систем можуть мати розриви безперервності, що приводить до перескока з одного режиму на іншій.
Ці і інші особливості показують, наскільки поведінка нелінійних систем різноманітніше за поведінку лінійних систем.
Якщо нелінійна функція допускає лінійну апроксимацію, у відхилення сигналів від їх необурених значень достатньо малі, з інженерної точки зору допустимо розглядати лінеаризовану систему і використовувати добре розроблений апарат теорії лінійних систем автоматичного управління (САУ).
А якщо нелінійна функція містить злами, розриви або неоднозначності, а також при підвищених вимогах до точності розрахунків застосовують теорію нелінійних САУ.
Нелінійні елементи, що використовуються в САУ, надзвичайно різноманітні і можуть класифікуватися по різних ознаках.
Залежно від ступені впливу у вирішуваній задачі даної нелінійності на поведінку САУ розрізняють істотні і неістотні нелінійності [6].
Нелінійні елементи діляться на природні, неминуче присутні, і штучні спеціально що вводяться в системи для додання їм бажаних властивостей, До першого типу відносяться нелінійні елементи з тертям, зазором (люфтом), гістерезисом, зоною нечутливості, насиченням до іншими явищами, що спотворюють лінійний зв'язок між вихідними і вхідними сигналами. Вплив цих нелінійностей шкідливо, і його звичайно прагнуть зменшити. До другого типу відносяться нелінійні керівники і коректуючі пристрої, що використовують релейні, степенні, показові, логічні та інші функції. Елемент є безінерційним (статичним), якщо він описується рівнянням алгебри або графіком (статичною характеристикою). Елемент, що описується нелінійним диференціальним, різницевий або інтегральним рівнянням, володіє динамічною нелінійністю.
Статичні нелінійності звичайно задаються у вигляді графіків. На малюнку 1.3 показані статичні характеристики, типові, що містять, нелінійності.
Шматково-постійними релейними характеристиками з розривами безперервності (1 – 5) володіють різного виду реле. Характеристику 1 має ідеальне реле,
2 – ідеальне трьохпозиційне реле із зоною нечутливості, 3 – трьохпозиційне реле із зоною нечутливості і з гістерезисом, 4 – двохпозиційне поляризоване реле з гістерезисом, 5 – нейтральне реле із зоною нечутливості і гістерезисом.
Окрім петлевих нелінейностей із гістерезисом, тобто відставанням зміни вихідної величини від зміни вхідної величини, існують петлеві нелінійності з випередженням, спеціально створювані для корекцій динамічних властивостей САУ.
Ступінчастою характеристикою 6 володіє дротяні потенціометри, квантователі сигналу по рівню та ін.
Безперервними шматково-лінійними характеристиками із зломами (7 – 11) апроксимуються нелінійності різних підсилювачів, випрямлячів. Характеристику 7 має підсилювач з насиченням, підсилювач-обмежувач, 8 – підсилювач із зоною нечутливості або порогом спрацьовування і з насиченням, 9 – підсилювач із змінним коефіцієнтом посилення, 10 – ідеальний однополуперіодний випрямляч, 11 – ідеальний двухполуперіодний випрямляч. Нелінійністю типу зазор (12) володіють зубчаті передачі. Механічна передача із зазором, гістерезисом і обмеженням має характеристику 13.
Криволінійні характеристики мають двотактний магнітний підсилювач і частотний детектор (14), електромашинний підсилювач (15), квадратор (16).
Елементи з в'язким тертям (17) і з в'язким тертям і гістерезисом (18) володіють негативним дефектом.
Бінарна (19), синусоїдальна (20), вилоподібна (21) і інші періодичні характеристики властиві фазовим детекторам.
Характеристики I, 2, 6–11, 14, 16, 17, 19–21. є однозначними. Вони дозволяють однозначно визначати величину вихідного сигналу, по відомій величині вхідного сажала.
Характеристики 3, 4, 5, 12, 13, 15, 18 є неоднозначними. Вихідний сигнал елементів з такими характеристиками залежить не тільки від величини вхідного сигналу в даний момент часу, але і від його поведінки в попередні моменти часу:
у(t)=F (x(t)) (1.1)
Крім того, нелінійності бувають симетричними і несиметричними, парними і непарними, гладкими і нерівними.
Дня аналітичного опису статичних нелінійностей часто використовують шматково-лінійну і поліномінальну апроксимації.
Нелінійності, є в будь-якому реальному приводі, можуть істотно впливати на його динамічні властивості, зокрема на стійкість. Цей вплив виявляється в наступному:
Привод, стійкий і має достатній запас стійкості в лінійному наближенні, може виявитися не стійким або не володіючим тим запасом стійкості, який очікується. Такий вплив надають частіше за все «петлеві» нелінійності (люфт, гістерезис), але при деяких положеннях в структурі приводу до цього ж ефекту можуть привести і однозначні нелінійності, наприклад навіть такі, як зона нечутливості [9–10].
В приводі можуть з'явитися принципово нові типи руху, які не можуть існувати в лінійних системах і тому не можуть бути навіть якісно пояснені з позиції лінійної моделі. До таких рухів відносяться в першу чергу автоколивання. Автоколивання можуть викликати ті ж нелінійності, які викликають зменшення запасу стійкості. В одноконтурних системах – це петлеві нелінійності, в неодноконтурних і однозначні.
Допустимі або недопустимі автоколивання в реальній системі – питання дискусійне. Все залежить від їх параметрів, тобто від розмаху і частоти. Одне поза сумнівом автоколивання не повинні порушувати вимоги по точності, отже, якщо їх і можна допустити, то тільки при таких, амплітудах, при яких викликана ними помилка сумісно з вимушеною помилкою, викликаною відтворенням всіх заданих законів управління, не виходить за межі допустимих.
Для достатньо повної думки про динамічні властивості проектованого приводу і його придатності для виконання доручених йому функцій потрібно розглянути і його, нелінійну модель. При цьому розгляді перед інженером виникають дві основні задачі: по-перше, зрозуміти, в чому може виявлятися вплив тієї або іншої нелінійності, зрозуміти фізику дії як окремої нелінійності, так і сукупності декількох нелінійностей і, по-друге, оцінити, кількісний вплив головних нелінійностей на стійкість і динамічну точність досліджуваної системи.
З огляду на те, що на нелінійну систему принцип суперпозиції не розповсюджується, строго кажучи, не можна розглядати вплив кожної нелінійності окремо і потім підсумовувати ефекти їх дії. Тому, здавалося б, потрібно розглядати вплив всіх нелінійностей спільно. Такий підхід пов'язаний із значними обчислювальними труднощами, які, правда, можуть бути подолані при використовуванні сучасних обчислювальних машин. Важливе інше, такий підхід не має сенсу, в усякому разі, на першому етапі проектування нелінійної системи, оскільки не дає корисної інформації про вплив кожної з нелінійностей на динамічні властивості, а отже, не може допомогти у виборі методів цілеспрямованої дії з метою забезпечення необхідних динамічних властивостей.
Частіше всього характер впливу нелінійності не змінюється при її дії в сукупності з іншими, тому має сенс розгляд і окремо взятих нелінійностей, і розумно вибраних комбінацій невеликого числа нелінійностей.
Розуміння впливу нелінійностей на динамічні властивості важливе і для правильного проектування лінійного варіанту – вибору структури, методів корекції і т.п., оскільки системи, еквівалентні по динамічних властивостях в лінійному плані, можуть виявитися зовсім не еквівалентними при обліку нелінійностей і при синтезі лінійної структури раціонально використовувати такі, у яких шкідливий вплив основних нелінійностей на динамічні властивості менше.
Особливістю нелінійного перетворення із зворотним зв'язком є неможливість отримання в явному виді залежності між вхідними і вихідними сигналами.
Тому для отримання статичних характеристик перетвореного сигналу, не можуть бути безпосередньо застосовані.
Дамо короткий опис розроблених в даний час методів дослідження нелінійних перетворень, що не вимагають завдання явної залежності між вхідним і вихідним сигналами.
1. Метод безпосередньої лінеаризації.
Нелінійні функції, що входять в перетворення із зворотнім зв'язком, замінюються лінійними, для чого використовується два перших доданків їх розкладання в ряд Тейлора. В тих випадках. коли ця операція можлива (нелінійності є аналітичними, а сигнали на їх вході – малі), задача втрачає свою специфіку і стає задачею про лінійні перетворення випадкових функцій.
В даній роботі детально не розглядатиметься метод безпосередньої лінеаризації, оскільки передбачається, що якщо, така можлива, то вона вже виконана в процесі переходу від реальної системи до її динамічної схеми.
2. Методи, засновані на вживанні канонічних розкладань випадкових сигналів.
В цих методах використовується можливість представлення випадкового процесу на кінцевому інтервалі часу сумою детермінованих функцій часу з коефіцієнтами, незалежними між собою випадковими величинами, що є. Таке уявлення дозволяє в принципі звести початкову задачу до проблеми інтеграції нелінійних диференціальних рівнянь, що містять тільки детерміновані функції часу.
3. Методи, засновані на представленні вихідних сигналів у вигляді процесів Маркова (одновимірних або багатовимірних) і використовуючі апарат диференціальних рівнянь Колмогорова для обчислення розподілу вірогідності цих сигналів.
Складність цього апарату, взагалі кажучи, обмежує область його вживання задачами аналізу перетворень, що задаються диференціальними рівняннями першого і, в деяких випадках, другого порядку, а також що приводяться до таких шляхом введення допоміжних перетворень, наприклад гармонійної лінеаризації.
Можливість отримання методами теорії Марківських процесів точних рішень, хоча і для обмеженого круга задач, привертає до них увагу широкого круга дослідників.
Метод дослідження перетворень, що містить шматково-лінійні функції, заснований на послідовному зшиванні (припасовуванні) рішень для кожної з областей фазового простору, де перетворення є лінійним. Метод застосовний для аналізу коливальних режимів, обурюваних малими випадковими діями.
Метод послідовних наближень.
Ідея методів витікає з фізичних уявлень про процес встановлення режиму в системі із зворотним зв'язком як ітернаційному процесі поступового багатократного обходу зовнішнього обурення по замкнутому контуру.
При цьому інтегральне рівняння, неявно задаюче перетворення із зворотним зв'язком, може розв'язуватися по схемі
 (1.2)
(1.2)
причому X0(t)=Z(t), тобто значення X(t) передбачається тим, що запізнюється, і кожного разу береться з попереднього ітераційного циклу.
Формально, звичайно, можна розглядати цю схему як звичайну математичну схему послідовних наближень, не пов'язуючи її з яким-небудь фізичним змістом.
Очевидно. що вживання цієї схеми зводить задачу про замкнуту систему до задачі про розімкнену.
Наближені методи, засновані на припущенні про те, що характер закону розподілу сигналу на вході нелінійного безінерційного перетворення відомий.
В цьому випадку розшукується лише деяка кількість числових параметрів, залишених невизначеними в рівнянні закону розподілу. Для цих параметрів виходять неявні співвідношення (звичайно трацендентні рівняння), які можуть бути дозволені, наприклад, графічно. Маючи у вигляді, що при фільтрації відбувається наближення закону розподілу до нормального, звичайно приймають саме такий характер закону. Нормальний закон повністю визначається величинами середнього mX і середньоквадратичного σX значення, а також видом кореляційної функції.
В основному методі цієї групи додатково використовується можливість статичної лінеаризації безінерційного нелінійного перетворення, а отже, вводиться припущення про те, що можна у виразі для кореляційної функції сигналу X(t) на вході. Це дозволяє істотно спростити задачу і оперувати тільки параметрами mX і σX.
Використовування ідеї розкладання по малому параметру дозволяє розширити можливості методу і враховувати малі спотворення виду кореляційної функції і відхилення закону розподілу від номінального.
Зважаючи на спільність і порівняльну простоту метод статичної лінеаризації представляє найбільший інтерес для розрахункової практики.
Виклад проблем, пов'язаних з дослідженням нелінійних перетворень із зворотним зв'язком, доцільно розділити на дві частини: першу, присвячену дослідженню стаціонарних режимів, тобто режимів, при яких сигнал, діючий всередині контуру зворотного зв'язку, є стаціонарною функцією часу, і другу, де розглядаються нестаціонарні режими [3].
Від режиму, який реалізується в даній системі (перетворення), визначається не її структурою, а характеристиками вхідних сигналів і значеннями параметрів системи.
При дослідженні конкретних систем звичайно доводиться аналізувати і стаціонарні, і нестаціонарні режими.
Вельми важливими практичним питанням є з'ясування умов переходу від одного режиму до іншого при зміні параметрів сигналу системи.
Ці умови у ряді випадків визначають так звану перешкодостійкість системи, тобто можливість втрати стійкості через наявність випадкових перешкод.
Методи дослідження і розрахунку нелінійних стежачих систем, що розглядаються нижче, базуються на гармонійній лінеаризації динамічних властивостей нелінійних елементів [9].
Досліджуваний елекрогідропривод розглядатимемо за допомогою методу гармонійної лінеаризації динамічних властивостей нелінійних елементів.
Метод гармонійної лінеаризації заснований на заміні нелінійного елемента еквівалентним (по деяких властивостях) лінійним. Умовою еквівалентності служить збіг вихідних коливань лінійної ланки з першою гармонікою вихідних коливань нелінійного, коли на їх вхід подається однаковий гармонійний сигнал x=Asinωt.
Якщо характеристика нелінійного елемента однозначна і симетрична щодо початку координат, то еквівалентний лінійний елемент може описуватися рівнянням y=q(А) x.
де х – вхідна координата; у – вихідна координата; q(А) – коэффициент гармонійної лінеаризації.
У разі неоднозначних (петлевих) нелінейностей перша гармоніка вихідного сигналу зсунута по фазі щодо вхідного сигналу: цією ж здатністю винен володіти й эквівалентний лінійний елемент, тому при лінеаризації використовується лінійний елемент, властивості якого визначаються рівнянням
 . (1.3)
. (1.3)
Передавальна функція в даному випадку виражається
 , (1.4)
, (1.4)
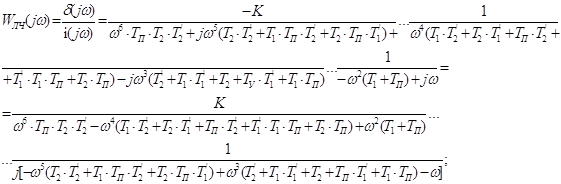
частотна характеристика (s=jω):
![]() . (1.5)
. (1.5)
Вибір коефіцієнтів і повинен забезпечити рівність між вихідними коливаннями еквівалентного лінійного і першою гармонікою реального нелінійного елемента.
В ще
більш загальному випадку коефіцієнти гармонійної лінеаризації можуть залежати і
від частоти:![]() , а частотна
характеристика нелінійного елемента прийме вигляд:
, а частотна
характеристика нелінійного елемента прийме вигляд:
![]() . (1.6)
. (1.6)
По фізичному значенню ![]() визначає відношення
амплітуди і зсув по фазі для першої гармоніки вихідних коливань нелінійного
елемента. Тому її часто називають еквівалентним комплексним коефіцієнтом
посилення нелінійного елемента.
визначає відношення
амплітуди і зсув по фазі для першої гармоніки вихідних коливань нелінійного
елемента. Тому її часто називають еквівалентним комплексним коефіцієнтом
посилення нелінійного елемента.
Величини
![]() і
і ![]() залежать від властивостей
нелінійного елемента, і для всіх типових нелінійностей їх значення є в
літературі. Часто вони містять постійні множники, що враховують коефіцієнт
посилення, передавальне відношення і т. п., значення яких входять в
передавальну функцію лінійної системи, що використовується на першому етапі
проектування при розгляді лінійної моделі. Раціонально ввести поняття типової
нелінійної ланки, по аналогії з поняттям типових лінійних ланок. (В літературі
зустрічаються визначення «приведена нелінійність», «нормована нелінійність» для
того ж поняття, яке тут позначається як «нелінійна ланка».)
залежать від властивостей
нелінійного елемента, і для всіх типових нелінійностей їх значення є в
літературі. Часто вони містять постійні множники, що враховують коефіцієнт
посилення, передавальне відношення і т. п., значення яких входять в
передавальну функцію лінійної системи, що використовується на першому етапі
проектування при розгляді лінійної моделі. Раціонально ввести поняття типової
нелінійної ланки, по аналогії з поняттям типових лінійних ланок. (В літературі
зустрічаються визначення «приведена нелінійність», «нормована нелінійність» для
того ж поняття, яке тут позначається як «нелінійна ланка».)
Коефіцієнти гармонійної лінеаризації типових нелінійних ланок не містять множників, незалежних від амплітуди, і їх властивості залежать тільки від властивостей нелінійності і амплітуди сигналу [1].
2. Аналіз і синтез досліджуваної системи управління сервоприводу з урахуванням впливу нелінійних ділянок
2.1 Аналіз технічного завдання на систему управління
В технічному завданні (ТЗ) систематизовані:
— постановка задач проектування систем управління;
— початкові дані (первинні характеристики) для об'єкту управління і його початкова математична модель;
— опис вигляду для проектує мої системи управління;
— умови експлуатації устаткування системи управління (СУ);
— вимоги до якості управління;
— характеристики енергоживлення устаткування.
ТЗ є основним документом в процесі проектування системи, містить всі початкові дані і вимоги до проектованої системи. Відповідно до пунктів 4.1–4.2 ТЗ формується вербальна модель об'єкту управління (ОУ) сервоприводу, виконана по нормальній гідродинамічній схемі з гідродинамічними органами управління, що є площинами, що відхиляються. На малюнку 2.1 представлена принципова схема типової електрогідравлічної рульової машинки [7], що є гідравлічним підсилювачем золотникового типу, керованим пропорційним електромагнітним елементом 7.
Основними елементами гідропідсилювача є: два золотники 4 і 5, робочий циліндр 17 з поршнем 18, кривошипно-шатунний механізм 14,15. Вихідний вал кривошипно-шатунного механізму 13 кінематично пов'язаний з управляючим органом літального апарату.
Робочий тиск в порожнинах циліндра створюється шестерним насосом 1, електродвигуном 10, що приводиться в рух. Пропорційний електромагнітний елемент 7 має якір. 8. Якір електромагніту кінематично пов'язаний із золотником за допомогою коромисла 3, сполученого з корпусом через плоску пружину 2 і тягу 5, Конструктивно електрогідравлічна РМ виконана у вигляді литого корпусу, що служить одночасно резервуаром з робочою рідиною (маслом), в якому розташовані практично всі перераховані елементи.
Автономність РМ забезпечується за рахунок вбудованого в корпус спеціального шестерного гідронасоса 1 для створення тиску робочої рідини в каналах гідросистеми.
Задані в ТЗ умови експлуатації устаткування СУ – це набір параметрів для проектування або вибору вимірювальних, обчислювальних засобів і виконавчих пристроїв, розміщуваних на електрогідравлічному приводі. Відповідно до приведених в ТЗ вимог до якості процесу управління можливо однозначно визначити структуру і параметри законів управління контурів системи, що забезпечують стійкість і якість процесів, а також виконати аналіз впливу відхилення параметрів об'єкту і регулятора на вказані показники по заданих запасах стійкості.
Вказані в ТЗ вигляд рухи дозволяють одержати уявлення про опорну траєкторію ОУ, що використовується в процесі формування лінійною моделлю, а також служать основою для вивчення робочої моделі ОУ у вигляді системи лінійних диференціальних рівнянь, передавальних функцій [15].
2.2 Математична модель об'єкту управління
2.2.1 Підсилювач сервоприводу
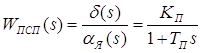
Підсилювач сервоприводу (ПСП) – це підсилювач потужності. На вхід підсилювача подаються струми порядка мікроампера, а на виході одержують до десятків або сотень міліамперів, а іноді навіть дещо ампер.
ПСП є достатньо малоінерційною ланкою. В самих «жорстких» випадках його передавальна функція приймає вигляд:
 (2.1)
(2.1)
Частіше за все має малу величину. Передавальну функцію ПСП приблизно можна записати як:
![]() . (2.2)
. (2.2)
Де ![]() – коефіцієнт
посилення підсилювача по потужності.
– коефіцієнт
посилення підсилювача по потужності.
2.2.2 Рульова машинка
Рульова машинка (РМ) – перетворить енергію, що поступає з ПСП, в механічне переміщення. Особливістю РМ є те, що вона представляє собою інтегруючу ланку, тобто при подачі на вхід сигналу, на виході одержуємо швидкість переміщення (кутову швидкість).
Рульова машина в системах управління літального апарату (СУЛА) самостійно звичайно не застосовується, а входить до складу замкнутого контуру сервоприводу і своїми динамічними і статичними параметрами визначає якість роботи сервоприводу.
Для повороту рульового органу рульова машина приводу повинна розвинути момент, більший моменту, що навантажує вихідний вал РМ. До таких моментів можна віднести:
М інерц. – інерційний;
М демпф – демпфуючий;
М шарн. – шарнірний;
М а1 – момент асиметрії, визначуваний неспівпаданням ліній дії сили тяги rδ і осі підвісу;
М а2 – момент асиметрії, визначуваний неспівпаданням сили інерції з віссю підвісу;
М тер – момент від сил сухого тертя.
Таким чином, рушійний момент (МРУШ) врівноважується моментами навантажень:
![]() (2.3)
(2.3)
Зважаючи на складність пристрою машини математичне представлення динамічних процесів в ній достатньо складне. Тому представимо РМ у вигляді двох роздільних динамічних ланок: електромеханічного перетворювача (ЕП) і гідропідсилювача (ГП) в кожному з яких є свій рухомий елемент (якір і поршень).
Тоді передавальна функція РМ може бути представлена у вигляді передавальних функцій двох послідовно сполучених ланок:
![]() (2.4)
(2.4)
Передавальну функцію ![]() електромеханічного
перетворювача можна одержати з рівнянні руху якоря:
електромеханічного
перетворювача можна одержати з рівнянні руху якоря:
![]() (2.5)
(2.5)
Рівняння (2.5) в стандартній операторній формі матиме вигляд:
![]() (2.6)
(2.6)
де
IЯ – приведений момент інерції якоря;
B – коефіцієнт електромагнітного демпфування і демпфуючих властивостей середовища, в якому переміщається якір;
С – жорсткість пружного елемента якоря;
IУ – управляючий струм якоря (вхідна дія);
αЯ – кут повороту якоря (вихідний параметр ланки);
K – коефіцієнт пропорційності, що характеризує залежність між струмом управління і електромагнітним моментом, що розвивається.
З рівняння (2.6) можна одержати передавальну функцію для електромеханічного перетворювача (ЕП):
 (2.7)
(2.7)
де ![]() – статичний
коефіцієнт передачі ЕП;
– статичний
коефіцієнт передачі ЕП;
ТЯ
– постійна часу, рівна ![]() ;
;
ξ – ступінь заспокоєння якоря, рівна  .
.
Для отримання рівняння динаміки гідропідсилювача (ГП) і його передавальної функції можна скористатися рівнянням Бернулі, що встановлює зв'язок між переміщенням золотників і зусиллям тиску рідини, що розвивається, на поршень, і записати рівняння руху поршня залежно від переміщення золотника (якоря, який механічно пов'язаний із золотниками):
![]() (2.8)
(2.8)
де
m – маса поршня;
у – координата переміщення поршня (вихідна величина);
αЯ – кутове переміщення якоря ЕП (вхідна величина);
k1 – приведений коефіцієнт демпфування;
k2 – приведений коефіцієнт пружності, що враховує зусилля від шарнірного моменту;
k3 – коефіцієнт пропорційності між кутовим переміщенням якоря і зусиллям, створюваним різницею тиску на торцях силового поршня.
Позначивши в рівнянні (2.8) через ![]() передавальне
число від поршня до вихідного валу рульової машини, а через δ – кут
повороту вихідного валу, одержимо:
передавальне
число від поршня до вихідного валу рульової машини, а через δ – кут
повороту вихідного валу, одержимо:
![]() (2.9)
(2.9)
З рівняння (2.9) можна одержати передавальну функцію підсилювача сервоприводу:
 (2.10)
(2.10)
де
 – статичний коефіцієнт
передачі підсилювача сервоприводу;
– статичний коефіцієнт
передачі підсилювача сервоприводу;
TПСП – постійна часу ПСП,
рівна ![]() ;
;
ξ – ступінь загасання, рівна ![]() або
або ![]() .
.
Враховуючи високу вихідну потужність, що розвивається на валу РМ, відсутність шарнірного моменту в ненавантаженому стані РМ і крихту власних пружних властивостей в конструкції підсилювача сервоприводу, його передавальну функцію можна представити у вигляді:
(2.11)
де
![]() – коефіцієнт посилення
підсилювача по потужності;
– коефіцієнт посилення
підсилювача по потужності;
ТП – постійна часу ПСП.
Об'єднуючи передавальну функцію двох ланок WЕП(s) і WПСП(s), згідно (2.7) і (2.11), одержимо передавальну функцію РМ.
Залежно від коренів виразу, дана передавальна функція може бути коливальною ланкою або ж надається як дві інерційні ланки.
Більш коректним (точним) для передавальної функції РМ є вираз:
![]()
 . (2.12)
. (2.12)
При
обліку коливання пального в баках, корпусу ракети і т.д., необхідно враховувати і
більш високоякісні члени передавальної функції. В цьому випадку РМ може
описуватися диференціальними рівняннями 14–15 порядку. Постійні часу, ![]() ,
,![]() ,
,![]() ,
,![]() , залежить від їх природи.
, залежить від їх природи.
Управляючий вузол (УВ) – є пропорційний електромеханічний перетворювач, звичайне могутнє поляризоване реле. Зусилля якоря поляризованого реле достатні для переміщення золотників в гідросистемі РМ. Силовий вузол (СВ) – звичайно складається з робочого (силового) циліндра з поршнем, що приводиться в рух гідрожидкістю, поступаючої під тиском від вузла живлення (ВЖ).
Основними вимогами, що пред'являються до рульової машинки, є: досягнення якнайменшої кількості коливальних ланок, досягнення якнайменшого значення постійних часу і вибір власної частоти. Власна частота РМ не повинна співпадати з частотою інших ланок виробу.
2.2.3 Датчик зворотного зв'язку
Звичайно як датчик зворотного зв'язку застосовуються, або індукційних датчики (ІД) або потенціометричні. Якщо датчик ЗЗ потенціометр, то в ЗЗ стоїть тільки масштабний опір. Від нього сигнал ЗЗ подається на суматор ПСП. Якщо датчик індукційний, то необхідно мати фазочутливий випрямляч (ФЧВ), а далі знову ставиться масштабний опір.
Перший датчик простіше, легко, але має два експлуатаційні недоліки:
– ковзаючий контакт
– східчаста характеристики
що обмежує його вживання.
Індукційний датчик більш надійних, а отже не вимагає частих перевірок.
Передавальна функція ланцюга зворотного зв'язку має вигляд:
![]() , (2.13)
, (2.13)
2.3 Аналіз частотних характеристик досліджуваного об'єкту
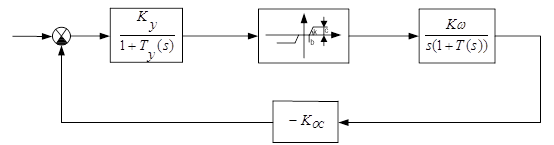
Для математичного опису об'єкту управління і системи в цілому спочатку побудуємо структурну схему досліджуваної системи управління сервоприводу без урахування нелінійності (мал. 2.3). Функціональна схема системи управління будувалася на підставі функціональної схеми системи (мал. 1.1).
При виборі параметрів сервоприводу оптимізації підлягає круговий коефіцієнт підсилення (добротність контура сервоприводу):
![]() . (2.14)
. (2.14)
Спочатку
визначається, а потім з урахуванням відомого коефіцієнта перерозподіляються значення ![]() і
і ![]() , щоб
виконувалося дана рівність.
, щоб
виконувалося дана рівність.
Звичайно
![]() прагнуть зробити якомога
більше, оскільки при цьому зменшуються постійні часу, зменшується запізнювання
контура сервоприводу, поліпшується чутливість всіх елементів і розкид
параметрів, тобто в цілому поліпшується динаміка сервоприводу. Збільшенню
прагнуть зробити якомога
більше, оскільки при цьому зменшуються постійні часу, зменшується запізнювання
контура сервоприводу, поліпшується чутливість всіх елементів і розкид
параметрів, тобто в цілому поліпшується динаміка сервоприводу. Збільшенню ![]() перешкоджає обмежена потужність,
а також те, що при певному значенні
перешкоджає обмежена потужність,
а також те, що при певному значенні ![]() контур
стане нестійким.
контур
стане нестійким.
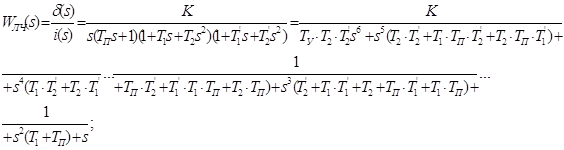
Запишемо передавальну функцію сервоприводу (СП) в розімкненому стані:
![]() ; (2.15)
; (2.15)
Ця стійка ланка, оскільки в знаменнику вираз:
![]()
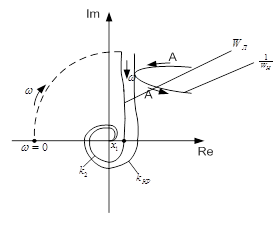
дає негативні корені, а корінь s=0 – нульовий полюс, можна обійти справа. Побудуємо АФЧХ.
З амплітудно-фазочастотної характеристики (АФЧХ), яка представлена на малюнку 2.4 видно, що круговий коефіцієнт не може бути як завгодно великим, оскільки при цьому ми одержимо обхват крапки (1, j 0), а значить нестійкість сервоприводу (критерій Найквіста).
При проходженні характеристики через крапку (1, j0) набудемо критичне значення кругового коефіцієнта. Таким чином, при K>KКР обхвату цієї крапки не буде (система стійка).
При
оптимізації кругового коефіцієнта необхідно, щоб розкиди параметрів не привели
до нестійкості системи. Звичайно розкиди параметрів повинні мати нульове
математичне очікування (М) і підлеглі нормальному закону розподілу. Розкиди
кругового коефіцієнта визначаються розкидами кожного з коефіцієнтів: ![]() . Якщо ці розкиди
некорельовані, мають М=0 і підлеглі нормальному закону розподілу, то достатньо
знайти розкиди кругового коефіцієнта. Ми вважатимемо, що коефіцієнти мають
випадкові значення.
. Якщо ці розкиди
некорельовані, мають М=0 і підлеглі нормальному закону розподілу, то достатньо
знайти розкиди кругового коефіцієнта. Ми вважатимемо, що коефіцієнти мають
випадкові значення.
![]() – математичні очікування
(номінальні значення). В технічних умовах на елементи указуються розкиди на
– математичні очікування
(номінальні значення). В технічних умовах на елементи указуються розкиди на ![]() . Кожне із
значень не перевищує 3σ з вірогідністю ≈ 0,997.
Трудомісткості полягають в тому, що розкиди звичайно в% від номінальних
значеннях, але це можна перевести в одиниці вимірювання, наприклад: задано ∆R
– відхилення (розкид) якого-небудь параметра.
. Кожне із
значень не перевищує 3σ з вірогідністю ≈ 0,997.
Трудомісткості полягають в тому, що розкиди звичайно в% від номінальних
значеннях, але це можна перевести в одиниці вимірювання, наприклад: задано ∆R
– відхилення (розкид) якого-небудь параметра.
 (2.16)
(2.16)
де ![]() – середньоквадратичне
відхилення.
– середньоквадратичне
відхилення.
З теорії вірогідності дисперсія кругового коефіцієнта визначиться як:
![]() (2.17)
(2.17)
По цій формулі можна визначити σK в%, а потім перевести в одиниці вимірювання самого параметра.
 (2.18)
(2.18)
де 3σК=∆K.
Тут одне невідоме – K, яке визначаємо, знаючи σК і KКР. Крім того повинні бути задані вимоги до запасу стійкості замкнутого контура.
Використовуючи ці положення, можна обчислити круговий коефіцієнт.
2.3.1 Вибір кругового коефіцієнта
Задано:
1) критичне значення кругового коефіцієнта – KКР (його завжди можна визначити, побудувавши годограф);
2)
розкиди ![]() (з технічних умов);
(з технічних умов);
3) вірогідність стійкої роботи сервоприводу – PСП.
Визначити: номінальне значення кругового коефіцієнта (добротність) – K0
1. Визначаємо ∆K.
![]() [%],
[%],
2. Розкид параметрів визначає
3. Значення PСП (Ф(і)) в таблицях інтеграла вірогідності відповідає відносна величина U (або n), рівна:.
В нашому випадку x – це круговий коефіцієнт K, виступаючий як випадкова величина.
Величина U показує, скільки разів вміщається σ в ∆K.
Таблиця інтеграла вірогідності має вигляд: див. табл. 2 в додатку Б.
4. З графіка інтеграла вірогідності, малюнок 2.5 маємо:
![]() ,
,
де ![]() .
.
Тому ![]() або
або  – вираз для визначення номінального
значення кругового коефіцієнта сервоприводу.
– вираз для визначення номінального
значення кругового коефіцієнта сервоприводу.
![]()
2.3.2 Нелінійності сервоприводу
Основна нелінійність сервоприводу (ОНСП) – це нелінійність рульової машинки, нелінійність статичних характеристик.
![]() Статичні характеристики
рульової машинки:
Статичні характеристики
рульової машинки:
1)
![]() швидкісна;
швидкісна;
2)
![]() моментальна.
моментальна.
![]() Швидкісна характеристика
рульової машинки – це залежність кутової швидкості вихідного сигналу
рульової машинки від вхідного сигналу.
Швидкісна характеристика
рульової машинки – це залежність кутової швидкості вихідного сигналу
рульової машинки від вхідного сигналу.
![]() (2.19)
(2.19)
де
- на
вхід РМ подається струм![]() ,
,
- на виході РМ – кутова швидкість.
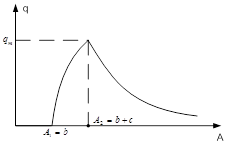
Моментна залежність моменту, що розвивається вихідним штоком, від вхідного сигналу, яка представлена на малюнку 2.6а.
Зона нечутливості є обов'язково; вона обумовлена особливістю конструкцій РМ і нечутливістю реле на вході.
Насичення Mmax обумовлено обмеженням потужності. Моментної характеристикою безпосередньо не використовується.
Зона
нечутливості обумовлена тими ж причинами. Що і для розглянутої моментної
характеристики. І ще тим, що і РМ завжди необхідно подолати якесь навантаження,
якийсь момент M1. Треба подати команду ![]() ; до цього
вихідний шток нерухомий, швидкість рівна нулю. Зона нечутливості «плаває» залежно
від моменту. Це вносить невизначеність при проектуванні.
; до цього
вихідний шток нерухомий, швидкість рівна нулю. Зона нечутливості «плаває» залежно
від моменту. Це вносить невизначеність при проектуванні.
Зона нечутливості складається як би з двох частин. Вона обумовлена:
1. Конструкцією РМ.
2. Моментом, прикладеним до вихідного штока РМ.
Щоб зменшити момент, прикладений до вихідного штока РМ, прагнуть зробити крутіше моментальну характеристику (ближче до релейної).
Всі ці нелінійності необхідно враховувати при проектуванні сервоприводу.
Побудова частотних характеристик для даного об'єкту проводитиметься в середовищі MATLAB/Simulink.
На вказаному графіку видно що, що пік амплітуди рівний А=1.6°, стале значення амплітуди, рівний А=1.2°и час перехідного процесу tПП=0.25 c, який задовольняє вимогам ТЗ. Величина перерегулювання складає приблизно δ=0.6 від сталого значення амплітуди і задовольняє вимогам ТЗ.
Побудуємо ЛАЧХ і ЛФЧХ нескоректованої системи за допомогою команд MATLAB, а також ЛАЧХ і ЛФЧХ скоректованої системи.
Запас стійкості по амплітуді рівний 40.5 дБ, по фазі -375 град. Зв'язана частота ωС=233 рад/с. Запас стійкості системи не достатні, щоб система залишалася стійкою при варіаціях параметрів, приводу і інших функціональних пристроїв в допустимих межах.
3. Експериментальна частина
Задачею експериментальної частини є, одержати навики дослідження статичної і динамічних характеристик електрогідравлічної рульової машинки (ЕГРМ), з використанням реальної установки (в аудиторії 402 радіо корпусу). Як об'єкт управління використовували електрогідравлічний рульовий привод, який представлений на малюнку 3.1.
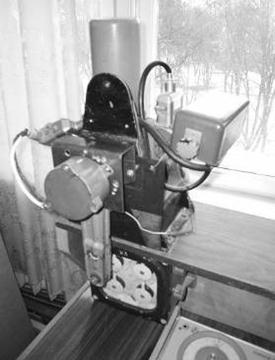
Малюнок 3.1 – Електрогідравлічна рульова машинка
На вихідному валу ЕГРМ встановлений рухомий електричний контакт,
який
стикається
з сектором нерухомого контакту, має певний тарований (заданий)
центральний кут ![]() . Послідовно в ланцюг
контактів включається годинник для визначення тривалості замкнутого стану
контактів при обертанні вихідного валу ЕГРМ. Для подачі управляючого сигналу
використовували джерело командних сигналів. Включення стенду здійснюється
включенням тумблерів.
. Послідовно в ланцюг
контактів включається годинник для визначення тривалості замкнутого стану
контактів при обертанні вихідного валу ЕГРМ. Для подачі управляючого сигналу
використовували джерело командних сигналів. Включення стенду здійснюється
включенням тумблерів.
а)
перемикач ![]() встановити в положення
2, перемикачі
встановити в положення
2, перемикачі![]() ,
, ![]()
![]() і
і
![]() в положення 1. Перемикачі
в положення 1. Перемикачі ![]() і
і ![]() використовуються для
відстежування зміни сигналів в контрольних точках системи і живлення;
використовуються для
відстежування зміни сигналів в контрольних точках системи і живлення;
_б) рухомий контакт ЕГРМ встановити в положення розімкненого стану по відношенню до нерухомого контакту, шляхом повороту вихідного валу ЕГРМ;
в) ручкою регулятора задаючого пристрою (ЗП)
встановити по вольтметру ![]() необхідне значення
управляючої напруги (знак сигналу залежить від повороту ЗУ управо або вліво по
відношенню до середнього положення ЗП);
необхідне значення
управляючої напруги (знак сигналу залежить від повороту ЗУ управо або вліво по
відношенню до середнього положення ЗП);
г) включити тумблери ![]() і (подається
живлення на годинник);
і (подається
живлення на годинник);
д) включити тумблер, після чого вихідний шток ЕГРМ після певного часу займе нове украй положення;
е) після зупинки штока ЕГРМ вимкнути тумблер ![]() живлення
електродвигуна і записати свідчення годинника в таблиці 3.1–3.3. Перемкнути
перемикач
живлення
електродвигуна і записати свідчення годинника в таблиці 3.1–3.3. Перемкнути
перемикач ![]() (
(![]() ) в положення 2 і по
першому (другому) променю осцилографа визначити напругу на виході СМ, після
чого встановити перемикач
) в положення 2 і по
першому (другому) променю осцилографа визначити напругу на виході СМ, після
чого встановити перемикач ![]() (
(![]() ) в положення 3 і по
першому (другому) променю осцилографа визначити вихідний сигнал на воді ПМ. Всі
свідчення занести в таблиці 3.1–3.3;
) в положення 3 і по
першому (другому) променю осцилографа визначити вихідний сигнал на воді ПМ. Всі
свідчення занести в таблиці 3.1–3.3;
ж) здійснити установку годинника в нульове положення відповідною кнопкою скидання годинника;
з) змінити знак на управляючої дії ЗП на протилежний і повторити пп. е-ж.
и) з певним інтервалом зміни управляючої дії повторити пп. в-к.
к) визначити значення кутових швидкостей обертання валу ЕГРМ, як відношення кута повороту вихідного штока до проміжку часу замкнутого стану контактів:
![]() , (3.1)
, (3.1)
де ![]() – фіксоване значення
кута;
– фіксоване значення
кута; ![]() – інтервал часу за який
шток ЕГРМ при і-том управлінні здійснює поворот на фіксований кут
– інтервал часу за який
шток ЕГРМ при і-том управлінні здійснює поворот на фіксований кут![]() . К ПМ = 3.
. К ПМ = 3.
Таблиця 3.1 Характеристики ЕГРМ в першому положенні перемикача
| № | Uзад, В | Uсум, В | Uпп, В |
|
| 1 | 0 | 0 | 0 | 0 |
| 2 | 0,5 | 1,11 | 1,5 | 0,075 |
| 3 | 1 | 2,31 | 3 | 0,152 |
| 4 | 1,5 | 3,5 | 4,5 | 0,3 |
| 5 | 2 | 4,9 | 6 | 0,4 |
| 6 | 2,5 | 6,27 | 7,5 | 0,455 |
| 7 | 3 | 7,47 | 9 | 0,465 |
| 8 | 3,5 | 8,67 | 10,5 | 0,48 |
| 9 | 4 | 9,9 | 12 | 0,471 |
| 10 | 4,5 | 11,13 | 13,5 | 0,477 |
| 11 | 4,95 | 11,57 | 14,85 | 0,48 |
| 12 | -0,5 | -1,55 | -1,5 | 0,009 |
| 13 | -1 | -2,75 | -3 | 0,063 |
| 14 | -1,5 | -4,04 | -4,5 | 0,153 |
| 15 | -2 | -5,3 | -6 | 0,27 |
| 16 | -2,5 | -6,77 | -7,5 | 0,35 |
| 17 | -3 | -7,9 | -9 | 0,41 |
| 18 | -3,5 | -9,2 | -10,5 | 0,45 |
Таблиця 3.2 Характеристики ЕГРМ в другому положенні перемикача
|
UЗ, В |
UСМ, В |
Uпп, В | Δt, с |
δi, рад/с |
| 0,5 | 0,7 | 2,1 | 10,95 | 0,096 |
| 1 | 1,7 | 5,1 | 6,12 | 0,17 |
| 2 | 5,3 | 15,9 | 3,03 | 0,34 |
| 3 | 7,7 | 23,1 | 2,25 | 0,46 |
| 4 | 9,8 | 29,4 | 2,34 | 0,447 |
| 5 | 10,1 | 30,3 | 2,26 | 0,463 |
| -0,75 | -2,2 | -6,6 | 26,94 | 0,04 |
| -1 | -3 | -9 | 10,5 | 0,1 |
| -2 | -4,1 | -12,3 | 3,12 | 0,33 |
| -3 | -9 | -27 | 2,05 | 0,51 |
| -4 | -10 | -30 | 2,25 | 0,465 |
| -5 | -10,1 | -30,3 | 2,19 | 0,48 |
Таблиця 3.3 Характеристики ЕГРМ в третьому положенні перемикача
|
UЗ, В |
UСМ, В |
Uпп, В | Δt, с |
δi, рад/с |
| 0,5 | 0,9 | 2,7 | 9,76 | 0,107 |
| 1 | 1,6 | 4,8 | 6,25 | 0,167 |
| 2 | 5,5 | 16,5 | 2,99 | 0,35 |
На малюнку 3.2 представлена статична характеристика суматора і розрахований коефіцієнт передачі суматора.
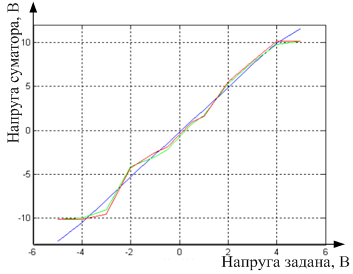
Малюнок 3.2 – Статична характеристика суматора
Для трьох різних положень перемикача коефіцієнт відповідно рівні:

Лінійна математична модель суматора має наступний вигляд:
![]() (3.2)
(3.2)
Нелінійна математична модель має вигляд:
![]()
Коефіцієнт
передачі підсилювача
потужності ![]()
На малюнку представлена швидкісна характеристика ЕГРМ і розрахований коефіцієнт передачі ЕГРМ, який рівний 0,02.
Получена передавальна функція має вигляд:
![]() .
.
3.1 Отримання частотних характеристик
Суть експериментального методу отримання частотної характеристики
будь-якої динамічної ланки полягає в дослідженні його реакції на дію гармонійного сигналу вигляду: ![]() . Для виконання
експерименту необхідно виконати наступне:
. Для виконання
експерименту необхідно виконати наступне:
а)
встановити перемикач ![]() в положення 3, що
відповідає підключенню виходу ГНЧ до входу СМ;
в положення 3, що
відповідає підключенню виходу ГНЧ до входу СМ;
б)
встановити перемикач ![]() в положення 1, що
відповідає підключенню сигналу з виходу генератора до першого променя
осцилографа, а перемикач
в положення 1, що
відповідає підключенню сигналу з виходу генератора до першого променя
осцилографа, а перемикач ![]() – в положення
4, що відповідає підключенню сигналу з виходу потенціометра зворотного зв'язку
ЕГРМ до другого променя осцилографа;
– в положення
4, що відповідає підключенню сигналу з виходу потенціометра зворотного зв'язку
ЕГРМ до другого променя осцилографа;
в) за допомогою будівельних ручок, що знаходяться не передній панелі ГНЧ, встановити частоту сигналу 0,02 Гц, а амплітуду сигналу підібрати так, щоб вона не потрапляла в зони не лінійності швидкісної характеристики ЕГРМ;
г) включити ГНЧ;
д)
включити тумблер![]() , при цьому вихідний шток
ЕГРМ повинен почати скоювати коливальні рухи певної амплітуди з частотою,
рівній частоті вхідного сигналу. Оскільки до складу ЕГРМ входить інерційна
ланка з великою постійною часу, то матиме місце фазовий зсув між вхідними і
вихідними сигналами;
, при цьому вихідний шток
ЕГРМ повинен почати скоювати коливальні рухи певної амплітуди з частотою,
рівній частоті вхідного сигналу. Оскільки до складу ЕГРМ входить інерційна
ланка з великою постійною часу, то матиме місце фазовий зсув між вхідними і
вихідними сигналами;
е) по осцилографу визначити амплітуду вихідного сигналу, зсув фаз між сигналами і одержані результати занести в таблицю 3.4;
ж) змінити частоту вхідного сигналу на 0,02 Гц і повторити п. е.
Таблиця 3.4 Частотні характеристики ЕГРМ
|
|
A |
|
| 0,126 | 0,5268 | 136,33 |
| 0,25 | 0,4587 | 65,66 |
| 0,5 | 0,32 | 29,38 |
| 1 | 0,1724 | 10,83 |
| 2,01 | 0,087 | 4,39 |
На малюнках 3.3 -3.4 представлені АЧХ і ФЧХ ЕГРМ
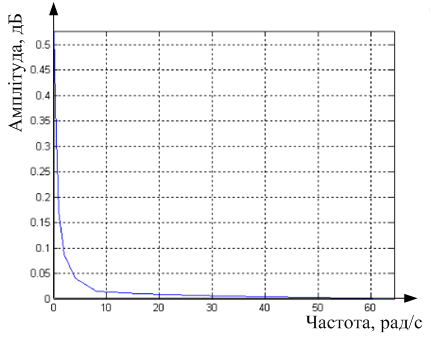
Малюнок 3.3 – АЧХ ЕГРМ
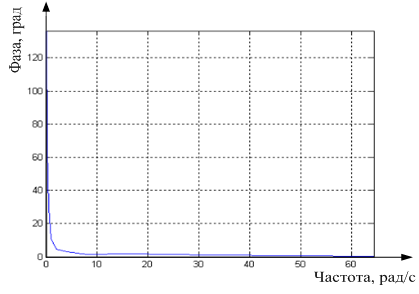
Малюнок 3.4 – ФЧХ ЕГРМ
4. Конструкторська частина
4.1 Проектування спеціалізованого обчислювача
В даній частині роботи буде проведений процес проектування спеціалізованого обчислювача.
В системі автоматичного позиціонування, що розробляється в даній роботі, регулятор буде виконаний на основі цифрового мікроконтролера, який повинен буде реалізовувати вибраний раніше закон управління. Для реалізації пропорційної і диференціальної складових потрібна інформація про положення керма управління. Пропонується функціональна схема, представлена на малюнку 4.1.

Малюнок 4.1 – Функціональна схема цифрового регулятора
ЗП – задаючий пристрій;
АК – аналоговий комутатор;
ПВХ – пристрій виборкихраніння;
АЦП – аналого-цифровий перетворювач;
МК – мікроконтролер;
ЦАП – цифро-аналоговий перетворювач;
ШІМ – широтно-імпульсний регулятор;
ШУ – шина управління.
4.2 Перетворювач алгоритмів управління для реалізації в спецобчислювачі
4.2.1 Аналіз алгоритмів управління
Вхідною інформацією для обчислювача є сигнали формувача задаючого сигналу і шифратора приросту. Обидва сигнали є 8-розрядним паралельним цифровим кодом.
Оскільки всі вхідні параметри алгоритму поступають безпосередньо з датчика і задаючого пристрою, то попередня обробка не потрібна. Принципи перевірки достовірності інформації з датчика не регламентуються і застосуються не будуть.
4.2.2 Розрахунок масштабуючих коефіцієнтів
Значення коду поступаючого з датчика, реєструючого переміщення, є 8-розрядним цифровим кодом, який характеризує величину лінійного переміщення керма управління. Згідно пункту 1, де була розроблена структурна схема системи позиціонування керма управління, значення сигналу зворотного зв'язку повинне бути зменшено в 1000 разів, відповідно виходячи з цього, цифровий 8-розрядний код поступаючий з шифратора приросту повинен бути помножений на коефіцієнт зворотного зв'язку:
![]() .
.
Дана операція буде виконана безпосередньо за допомогою мікроконтролера, при виконанні алгоритму реалізації заданих арифметичних операцій.
4.2.3 Оцінка реалізованої періоду дискретності
Заданий
період дискретності складає ![]() . Стандартна тактова
частота мікроконтролера МК51
. Стандартна тактова
частота мікроконтролера МК51 ![]() , що
використовується, отже, період імпульсів для таймера МК51 складе
, що
використовується, отже, період імпульсів для таймера МК51 складе ![]() . Максимальний інтервал
часу реалізовуваний таймером
. Максимальний інтервал
часу реалізовуваний таймером ![]() .
Оскільки
.
Оскільки ![]() , то даний період дискретності
може бути реалізований тільки апаратними засобами МК51 (таймер в 16-бітовій
конфігурації рахункового регістра).
, то даний період дискретності
може бути реалізований тільки апаратними засобами МК51 (таймер в 16-бітовій
конфігурації рахункового регістра).
4.2.4 Оцінка реалізації обчислювача на особливі ситуації
Особливими ситуаціями в системі, що розробляється, є сигнали переривань. Джерела переривань і пов'язані з ними події дані в таблице. 4.1
Таблиця 4.1 Джерело переривань і пов'язані з ними події дано
| Подія | Сигнал | Дія | Обробка | Додаткові умови |
|
Завершення періоду |
Переривання від таймера | Перезапис стартового числа і перехід на початок функціонального алгоритму | В спеціальній процедурі | Вищий пріоритет |
| Прийом байта з буфера паралельного порту | Переривання від паралельного порту | Читання коду (1 байт) з буфера паралельного порту | В спеціальній процедурі |
4.2.5 Структура повного алгоритму роботи системи
Повний алгоритм функціонування обчислювача за рішенням задачі управління складається з таких етапів:
1. Прийом коду із значенням управляючого сигналу (по сигналу готовності, який обробляється через канал переривання).
2.
Прийом коду із значенням сигналу з датчика положення ![]() .
.
3. Реалізація обчислень (узгодження вхідних сигналів, реалізація закону управління).
4. Очікування завершення періоду, реалізоване через очікування сигналу переривання від таймера.
5. Перезапуск таймера (запис стартового числа) і перехід до пункту 1.
4.3 Побудова функціональної схеми спецобчислювача
Спецобчислювач призначений для перетворення і обробки інформації тією, що подається з датчиків. На вхід спецобчислювача подається аналоговий сигнал в діапазоні 0…+5В, а на виході одержуємо аналоговий сигнал в діапазоні 0…+10В. Функціональна схема спецобчислювача представлена на малюнку 4.2. Для здійснення керованої передачі аналогової інформації в АЦП застосований 8-розрядний аналоговий комутатор з дешифратором, який комутує вихід з 0 і 1 з 8 аналогових входів. В нашому випадку всю решту входів заземлимо, окрім останнього, який залишимо для виходу з підсилювача потужності. Номер даного входу визначається двійковим номером, заданим на управляючих входах. Інформація про двійковий номер поступає безпосередньо від мікроконтролера. Для перетворення 8-розрядного дискретного коду в аналоговий застосовний 10-розрядний ЦАП, для цього на два розряди ЦАП подамо землю. З цього виходить, що в обчислювач повинні входити: мікроконтролер (МК), АЦП, ЦАП, пристрій виборкихраніння (УВХ), аналоговий комутатор (АК).
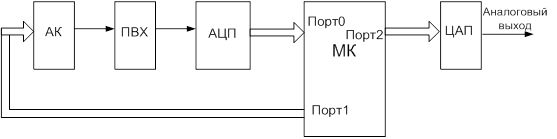
Малюнок 4.2 – Функціональна схема спецобчислювача
4.3.1 Формування алгоритму роботи спецобчислювача
Спецбчислювач на базі мікроконтролера виконує наступні операції:
– отримання і обробка інформації з підсилювача, датчика зворотного зв'язку по положенню і датчика кутової швидкості;
- реалізація закону управління;
- видача аналогового сигналу на електрогідравлічний перетворювач.
На малюнку 4.3 представлений спрощений алгоритм роботи обчислювача по отриманню, перетворенню і передачі даних. Алгоритм представлений у вигляді блок-схеми.
На основі запропонованого алгоритму роботи складена програма роботи управляючого обчислювача, побудованого на основі мікроконтролера AT89S8252 фірми Atmel.
Розроблена програма вводиться в керований обчислювач за допомогою LPT-порту ПК і каналу програматора, який здійснює прошивку резидентної пам'яті програм мікроконтролера.
4.4 Розробка структури ПО і оцінка необхідних ресурсів
Програмне забезпечення для вирішення даної задачі складатиметься із структурних елементів, характеристика яких представлена в таблиці 4.2.
Таблиця 4.2 Характеристика структурних елементів ПО
| № | Назва і функціональне призначення | Передбачуваний об'єм коду, байт | Передбачуваний об'єм даних, байт | Макс. час виконання, мс | Вимоги по розміщенню в пам'яті |
| 1 | Початковий пуск і ініціалізація (стік, таймери, переривання) | 50 |
Регістри РСФ, стік в РПД (16 байт) |
0.1 | Після таблиці векторів переходу |
| 2 | Функціональний алгоритм ПД-регулювання | 100 |
РПД (до 30) |
10 | довільне |
| 3 | Процедури уведення-виведення і управління ЦАП |
150 кожна |
РПД (до 10 байт) |
1 кожна |
довільне |
| 4 | Арифметичні процедури для 2-байтових чисел («+»,» – «,»*») | До 30 байт («+»,» – «) і до 100 («*») |
Банк Рон (8 байт) |
0.05 і 0.2 | довільне |
| 5 |
Таймірованіє (період |
20 | РСФ | 0.02 | довільне |
Під процедурами введення(висновку) маються на увазі дії по
управлінню каналом введення(висновку), по перетворенню числа. Загальна
діаграма завантаження обчислювача в межах базового періоду роботи ![]() представлена на
малюнку 4.4.
представлена на
малюнку 4.4.

Малюнок 4.4 – Діаграма завантаження обчислювача
На схемі цифрами позначені:
1. Установка адреси роботи.
2. Дозвіл роботи аналогового комутатора.
3. Дозвіл роботи УВХ і АЦП.
4. Час перетворення.
5. Читання даних.
6. Заборона роботи АЦП і аналогового комутатора.
7. Установка адреси на аналоговий комутатор.
8. Дозвіл роботи аналогового комутатора.
9. Дозвіл роботи УВХ і АЦП.
10. Час перетворення.
11. Читання даних.
12. Визначення значення управляючої дії.
13. Вибір закону управління на Порт 2.
Максимальний час на виповнення алгоритму в межах базового періоду складає (на підставі таблицы 4.2):
![]() ,
,
де ![]()
(![]() – час виконання
функціонального алгоритму).
– час виконання
функціонального алгоритму).
Тоді ![]() .
.
Оскільки ![]() <, то циклограма
малюнка 2.4 може бути реалізована на даному процесорі безпосередньо.
<, то циклограма
малюнка 2.4 може бути реалізована на даному процесорі безпосередньо.
Необхідний об'єм пам'яті програм (ПЗП) складає:
![]() байт.
байт.
Об'єму ПЗП достатньо для виконання алгоритму, оскільки об'єм РПП складає 4096 байт.
4.5 Розробка принципової схеми обчислювача
4.5.1 Вибір елементарної бази
Годинозадаючий ланцюг.
Годинозадаючий ланцюг необхідний для завдання тактових імпульсів мікроконтролеру для його синхронізації. На малюнку 4.5 представлена принципова схема час задаючого контура, створеного на основі кварцового резонатора з частотою 22.1184 Мгц, включеного по схемі з середньою крапкою.
Кварцовий резонатор, що підключається до зовнішніх висновків XTAL1 і XTAL2 мікроконтролера, управляє роботою внутрішнього генератора, який формує внутрішні сигнали синхронізації.
На основі сигналів синхронізації пристрій управління мікроконтролера формує машинний цикл фіксованої тривалості, яка дорівнює 12 періодам резонатора. Вибір зупинений саме на такій схемі з таким кварцовим резонатором унаслідок того, що у взаємодії з мікроконтролером AT89S8252 цей ланцюг генерує крок роботи МК рівний 0.5 мкс. Такий крок роботи програм повністю влаштовує, оскільки дозволить легко вкласти алгоритм роботи мікроконтролера в 5 мс.
Для проектованого управляючого обчислювача був вибраний мікроконтролер AT89S8252 фірми Atmel. На малюнку 4.6 представлено графічне позначення мікроконтролера AT89S8252 фірми Atmel.
Вибір цього мікроконтролера обумовлений наступним:
- гранично низька вартість;
- наявність 8 кбайтів FLASH-ПЗП програм з можливістю внутрішньосистемного перепрограмування через SPI (serial programming interface) канал;
- можливість роботи на низьких тактових частотах (аж до нуля Гц), що важливе в системах реального часу.
Основні характеристики наступні:
- три рівні захисту програм;
- 256 байтів внутрішньої оперативної пам'яті;
- три 16-бітові таймери/лічильники;
- 32 програмовані лінії уведення-виведення;
- дев'ять джерел переривань;
- програмований послідовний інтерфейс;
- master/slave SPI послідовний інтерфейс;
- режим зниженого енергоспоживання (живлення +5 В);
- переривання при подачі напруги;
- програмований сторожовий таймер;
- два регістри – покажчика даних;
- прапор відключення живлення.
Мікроконтролер випускається в DIP корпусі, що дозволяє як встановлювати контроллер на контактний майданчик, так і упаювати його в схему.
Шинний формувач застосовується для збільшення потужності вхідних і вихідних (запетлеваних) сигналів мікроконтролера до 20 мА. Як шинний формувач в представленому пристрої використовується мікросхема КР1533АП6, графічне позначення якої представлено на малюнку 4.7.

Малюнок 4.7 – Шинний формувач
Мікросхема
є восьмирозрядним двонаправленим приймачем-передавачем з двома станами на
виході і без інверсії вхідної інформації. Режим роботи визначається комбінацією
сигналів на двох входах управління – ![]() і
і ![]() . При низькому
рівні напруги на вході управління третім
. При низькому
рівні напруги на вході управління третім ![]() станом
напряму передачі визначається логічним рівнем на вході
станом
напряму передачі визначається логічним рівнем на вході ![]() , а при високому рівні
напруги на вході
, а при високому рівні
напруги на вході ![]() виходи мікросхеми
переводяться у високоімпедансний стан (таблиця 4.3).
виходи мікросхеми
переводяться у високоімпедансний стан (таблиця 4.3).
Таблиця 4.3 Таблиця істинності шинного формувача
|
|
|
Операція |
| H | X | Третій стан |
| L | H | D1®D2 |
| L | L | D2®D1 |
Для забезпечення роботи щодо низкоомного або велике навантаження місткості виходи мікросхеми мають підвищену потужність в порівнянні із стандартними.
COM-порт
На малюнку 4.8 представлений зовнішній вигляд роз'єму COM-порту (mother) на шлейфі передачі даних, з вказівкою номерів ніжок.
![]()
Малюнок 4.8 – Зовнішній вигляд роз'єму COM-порту
Використовування цього порту ПК як і пристрої узгодження рівнів необхідно при розробці каналу передачі даних на ПК. COM-порт – це послідовний порт ПК, через який можлива передача даних по протоколу RS-232 на підключений ПК.
В таблиці 4.4 представлені відповідні номери ніжок мікроконтролера і COM-порту з поясненням їх призначення, необхідні для наладки даного каналу зв'язку.
Таблиця 4.4 Принцип сполучення МК і ПК
| Мікроконтролер | COM-порт | Призначення |
| 10 | 7 | RXD_MK і TXD_PK |
| 11 | 4 | TXD_MK і RXD_PK |
| 20 | 8 | GND |
LPT-порт
На малюнку 4.9 представлений зовнішній вигляд роз'єму LPT-порту (father) на шлейфі програматора, з вказівкою номерів ніжок.
![]()
Малюнок 4.9 – Зовнішній вигляд роз'єму LPT-порту
LPT-порт – це паралельний 25-піновий порт ПК. Вживання цього порту ПК пов'язано з наладкою каналу програматора. Канал програматора здійснює прошивку резидентної пам'яті програм мікроконтролера AT895S8252.
В таблиці 3.4 представлені відповідні номери ніжок мікроконтролера і LPT-порту з поясненням їх призначення.
Таблиця 3.4 Таблиця опису шлейфу програматора
| Мікроконтролера | LPT-порт | Призначення (SPI) |
| 6 | 7 | Mosi |
| 7 | 10 | Miso |
| 8 | 8 | Sck |
| 9 | 6 | Rst |
| 20 | 18, 25 | Gnd |
4.6 Створення принципової схеми управляючого спецобчислювача
Після вибору і розрахунку функціональних блоків пристрою можна переходити до створення принципової схеми управляючого обчислювача.
Принципова схема є з'єднанням вибраних функціональних блоків по функціональній схемі, з урахуванням всіх правил з'єднання. Принципова електрична схема розробленого пристрою представлена в додатку А.
5. Дослідницька частина
5.1 Вибір кругового коефіцієнту нелінійного сервоприводу
В нелінійних системах звичайно присутні автоколивання. Як основний критерій при виборі кругового коефіцієнта використовують вимоги відсутності автоколивань в нелінійній системі. Щоб досліджувати систему на автоколивання, треба її розімкнути так, щоб виділити нелінійність.
Всю розімкнену систему замінюємо двома ланками: лінійної і нелінійної частинами (мал. 5.2)

Малюнок 5.2 – Ланки: лінійна і нелінійна частина
Використовують
метод гармонійної лінеаризації. Запишемо умову наявності автоколивань в системі: ![]() , звідси
, звідси  (умова наявності
автоколивань в системі).
(умова наявності
автоколивань в системі).
Перейдемо до умови відсутності автоколивань. Ця умова запишеться
![]() , отже
, отже  – умова відсутності
автоколивань. Це означає, що годограф WЛ(s) і годограф
– умова відсутності
автоколивань. Це означає, що годограф WЛ(s) і годограф ![]() не перетинаються, тоді,
автоколивання в системі відсутні. Вигляд
не перетинаються, тоді,
автоколивання в системі відсутні. Вигляд ![]() різний,
залежно від того, яка нелінійність переважає. Якщо немає петлі, то нелінійність
однозначна (мал. 5.3).
різний,
залежно від того, яка нелінійність переважає. Якщо немає петлі, то нелінійність
однозначна (мал. 5.3).
Малюнок 5.3 – Годограф без петлі
Те мінімальне значення кругового коефіцієнта посилення сервоприводу, при якому виконується умова існування автоколивань в системі, назвемо критичним.
Чому мінімальне?
Перетин годографів може бути найрізноманітнішим. Завжди в системі буде два граничні цикли. Один стійкий, інший нестійкий. Але коефіцієнт не буде критичним.
Найменший коефіцієнт, який виходить тільки при торканні і буде мінімальним і критичним. Оскільки, якщо його зменшити, то будуть відсутні автоколивання.
Розглянемо деякий окремий випадок.
Розмикаємо систему на вході нелінійної ланки (мал. 5.4)
Малюнок 5.4 – Розімкнена система на вході нелінійної ланки
де ![]() .
.
Передавальна функція лінійної частини системи:
![]() (5.1)
(5.1)
передавальна функція нелінійної частини системи WН – це коефіцієнт гармонійної лінеаризації в методі гармонійної лінеаризації. В загальному випадку WН складається з речовинної і уявної комплексної складових.
В даному випадку WН(s) – це дійсне число.
В
загальному випадку: ![]() .
.
В
даному випадку: ![]() ;
; ![]() .
.
Для K=1, WН(s) виглядає таким чином (малюнок 5.5)
Малюнок 5.5 – Дійсне число WН для K=1
Величина q для однозначної нелінійності залежить тільки від амплітуди А.
Оскільки K=1, то нелінійність виглядає таким чином (малюнок 5.6)
Поки амплітуда А не перевищує зону нечутливості b, тобто до А=b, система розімкнена і A=0.
Малюнок 5.6 – Нелінійність для K=1
Побудуємо
годограф для WЛ(s) і  (малюнок 5.7)
(малюнок 5.7)
Малюнок
5.7 – Годограф для WЛ(s) і
де  .
.
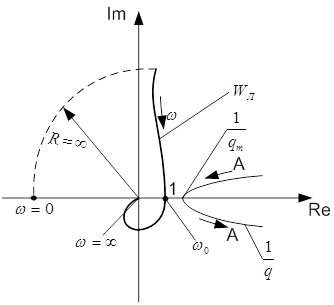
Розглянемо передавальну функцію лінійної частини системи для будь-якої лінійної передавальної функції можна записати:
 (5.2)
(5.2)
Такий запис справедливий, якщо передавальна функція не має нульових полюсів.
А і В-це поліноми від ω.
А – парний ступінь ω; В-непарний ступінь ω.
Крапка 1 на годографі характерна тим, що фазовий зсув чисельника рівний фазовому зсуву знаменника передавальної функції.
Сумарна
ФЧХ такої ланки рівна фазовій характеристиці чисельника мінус фазова
характеристика знаменника; значить фазовий зсув рівний нулю: , звідси
, звідси  при
при ![]() . Визначимо модуль
передавальної функції лінійної частини системи.
. Визначимо модуль
передавальної функції лінійної частини системи.
А0 – модуль передавальної функції на частоті ![]() :.
:.
Знайдемо
значення частоти ![]() .
.
 ;
;
![]() ;
;
 ;
;
 ;
;  .
.
З одержаних співвідношень визначаємо значення кругового коефіцієнта нелінійного сервоприводу.
 ;
; .
.
Систему
більш високого порядку можна апроксимувати системою більш низького порядку для
частот в околиці ![]() .
.
5.2 Розрахунок сервоприводу з нелінійною ланкою
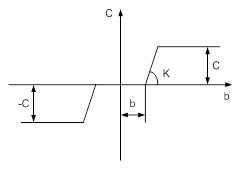
а). Нелінійна ланка задана так (малюнок 5.8)
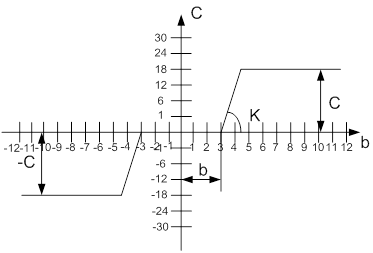
Малюнок 5.8 – Нелінійна ланка
Характеристика нелінійної ланки:
b=3 ма; c=18 ма; K=1![]() ;
;
б). Лінійна частина:
 ;
;
З умови технічного завдання дано:
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
;![]() ;
;
![]() ;
; ![]()
де РСЕР – середній розподіл Гауса
Розрахунок:
1) Визначимо qm.
Значення коефіцієнта q для даного виду нелінійності визначається виразом:
 (5.3)
(5.3)
де а – амплітуда вхідного сигналу;
![]() .
.
Дана
нелінійність має ![]() . Для визначення qm
задаємося різними значеннями амплітуди вхідного сигналу, враховуючи, що
a>>b2 і прораховуємо на обчислювальній машині (ОМ) значення
коефіцієнта q(а) з кроком.
. Для визначення qm
задаємося різними значеннями амплітуди вхідного сигналу, враховуючи, що
a>>b2 і прораховуємо на обчислювальній машині (ОМ) значення
коефіцієнта q(а) з кроком.
Результати обчислення заносимо в таблицю 1 в додатку Б.
2). Визначимо KКР (використовуючи A0):
Визначимо
з умови: ![]()
Зробимо
заміну: ![]()
KКР визначається при ![]() . При підстановці
в дійсну частину
. При підстановці
в дійсну частину ![]() одержимо A0.
В цьому випадку K=KКР.
одержимо A0.
В цьому випадку K=KКР.
Використовуючи
цей результат, запишемо  :,
звідси критичний круговий коефіцієнт сервоприводу рівний:
:,
звідси критичний круговий коефіцієнт сервоприводу рівний:
Значення qm узято з таблиці 2 додатку Б.
3). Визначення номінального значення добротності сервоприводу і коефіцієнта зворотного зв'язку:
а) ![]()
б) σ визначаємо з виразу:

в) номінальне значення добротності визначиться:
![]()
г) значення коефіцієнта ЗЗ знайдемо із співвідношення:
![]()
5.3 Облік впливу інерційності сервоприводу на стійкість руху
Приймаємо допущення:
1. Нелінійності неістотні.
2. Лінійну частину сервоприводу спростимо до 2-го порядку.
Вважатимемо, що ТП=0.
Для лінійного сервоприводу 2-го порядку в розімкненому стані:
 (5.4)
(5.4)
Запишемо передавальну функцію сервоприводу:
 (5.5)
(5.5)
де .
.
Під керованістю розуміють здатність змінювати параметри свого руху при відхиленні управляючих органів. Керованість напряму пов'язана із стійкість.
Під стійкістю розуміється здатність об'єкту управління повертатися на задану траєкторію після дії на нього обурення.
Динамічними показниками керованості в тимчасовій області вважаються параметри перехідного процесу при східчастому відхиленні управляючих органів час перехідного процесу і величина перерегулювання, в частотній області – власна частота короткоперіодичного руху (ω0) і відносний коефіцієнт загасання (ξ).
Для перевірки вибраних алгоритмів управління виконаємо моделювання системи з використанням системи моделювання Matlab/Simulink для побудови частотних характеристик. Досліджувана схема моделювання сервоприводу з урахуванням нелінійності приведена на малюнку 5.9.
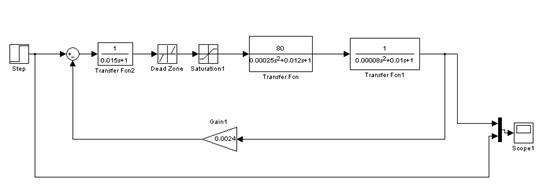
Малюнок 5.9 – Досліджувана схема сервоприводу з урахуванням нелінійності
На малюнку 5.10 представлений перехідною процес досліджуваної системи сервоприводу з урахуванням нелінійності при КЗЗ> 0.0024=0.024
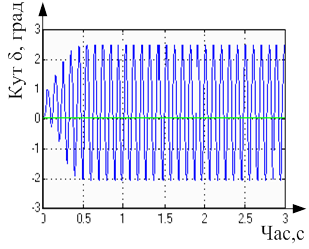
Малюнок 5.10 – Перехідної процес досліджуваної системи сервоприводу з урахуванням нелінійності при КЗЗ > 0.0024=0.024
З одержаного перехідного процесу видно, що пік амплітуди рівний А=2.5°, немає сталого значення амплітуди і час перехідного процесу дуже великий, т.ч. присутні автоколивання, отже система нестійка, це не задовольняє вимогам ТЗ. Величина перерегулювання складає приблизно δ=1.5% від сталого значення амплітуди і теж не задовольняє вимогам ТЗ.
На малюнку 5.11 представлений перехідною процес досліджуваної системи сервоприводу з урахуванням нелінійності при КЗЗ=0.0024.
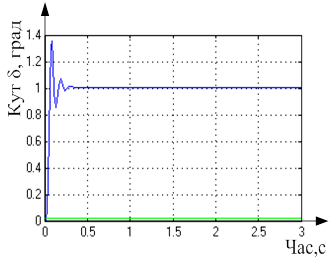
Малюнок 5.11 – Перехідної процес досліджуваної системи сервоприводу з урахуванням нелінійності при КЗЗ = 0.0024
На вказаному графіку видно що, що пік амплітуди рівний А=1.39°, стале значення амплітуди, рівний А=1°и час перехідного процесу tПП=0,35c, який задовольняє вимогам ТЗ. Величина перерегулювання складає приблизно δ=0.39% від сталого значення амплітуди і задовольняє вимогам ТЗ. Отже можна зробити висновок, що КЗЗ розрахований правильно, система стійка.
Побудуємо ЛАЧХ і ЛФЧХ нескоректованої системи (мал. 5.12) за допомогою команд MATLAB/Simulink, а також ЛАЧХ і ЛФЧХ скоректованої системи.
На малюнку 5.12. приведені ЛАЧХ нескоректованої системи і варіант ЛАЧХ скоректованої системи. Верхній графік відображає характеристики розімкненої нескоректованої системи (ЛАЧХ, що розташовується); нижній графік – розімкненої скоректованої системи (бажана ЛАЧХ), також на малюнку приведена фазочастотна характеристика.
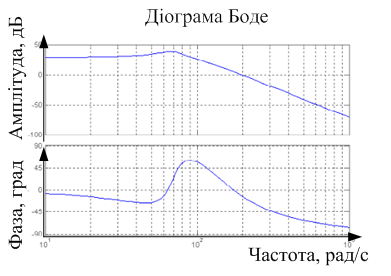
Малюнок 5.12 – ЛАЧХ і ЛФЧХ замкнутої скоректованої системи
Визначимо запас стійкості розімкненої системи по амплітуді і запас стійкості по фазі. Запаси відображені на малюнку 5.13.
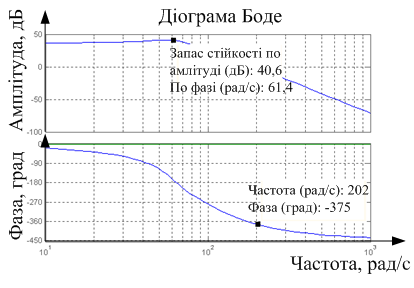
Малюнок 5.13 – ЛАЧХ і ЛФЧХ розімкненої скоректованої системи
Запас стійкості по амплітуді рівний 40.6 дБ, по фазі -375 град. Зв'язана частота ωЗ=202 рад/с. Запас стійкості системи достатні, щоб система залишалася стійкою при варіаціях параметрів, приводу і інших функціональних пристроїв в допустимих межах.
Побудуємо годограф Найквіста незмінної частини досліджуваної системи сервоприводу з урахуванням нелінійності в середовищі MATLAB. Результат обчислення АФЧХ приведений на малюнку 5.14.
Аналіз годографа частотної характеристики незмінної частини системи показує, що годограф перетинає речовинну вісь в крапці (60; jO). Виходячи з критерію стійкості Найквіста, можемо укласти, що замкнута досліджувана система буде стійкою, якщо точка перетину годографом речовинної осі буде ліво крапки (-1; j0), тобто коли.
На даному етапі проектування виконується перевірка відповідності показників якості управління скоректованої, досліджуваної системи сервоприводу з урахуванням нелінійності по вимогах технічного завдання (ТЗ). Якщо всі показники якості скоректованої системи задовольняють вимогам ТЗ, то знайдений алгоритм роботи системи приймається до реалізації. Якщо якийсь із показників якості управління скоректованої системи не відповідає вимогам ТЗ, то необхідно повернутися до етапу синтезу алгоритму управління і відповідним чином змінити форму бажаної ЛАЧХ розімкненої системи [13].
Оцінка якості проводиться по перехідних характеристиках замкнутої системи і по частотних характеристиках розімкненої і замкнутої системи.
Сталі помилки оцінюємо по перехідних характеристиках при t >∞. З малюнка 5.15 виходить, що εстале=0%.
Сталу швидкісну помилку оцінюємо по реалізації скоректованої системи на швидкісне задаюче дію при t >∞. З малюнка 5.15 виходить, що εшв ≈ 0,93%.
6. Економічна частина
6.1 Комплексний план теми НДР
6.1.1 Опис об'єкту
Досліджуваний виріб є електрогідроприводом (рульова машинка) з урахуванням нелінійності.
Метою науково-дослідницької роботи є дослідження впливу зон нелінійності на показники якості сервоприводу.
Результатом дослідження є визначення критичної добротності сервоприводу при заданих нелінійних ділянках. Визначення допустимої амплітуди сигналу при заданих нелінейностях, для підприємств які досліджують даний електрогідропривод.
Електрогідравлічна рульова машинка (РМ), яка представлена в розрізі на малюнку 5.1 і входить до складу універсального лабораторного стенду дослідження сервоприводов (УЛСДС), входять в комплект автомата стабілізації і призначається для повороту газоцівкового керма під впливом командного струму, що поступає з підсилювача-перетворювача.
Рульова машинка складається з наступних основних частин: корпусу, вузла управління, шестерного насоса, електродвигуна, кривошипно-шатунного механізму, запобіжних і повітряних клапанів.
Корпус. Всі механізми рульової машинки зв'язані між собою в загальному корпусі, відлитому з алюмінієвого сплаву. Частина корпусу, в якій розміщений кривошипно-шатунный механізм з поршнем, утворює робочий циліндр 1 РМ. Друга його частина, що вміщає вузол управління і насос, утворює ванну – резервуар, заповнений робочою рідиною. Два канали в нижній частині корпусу через шестерний насос пов'язують ванну з правою і лівою частиною робочого циліндра. У верхній частині робочого циліндра є два нарізні отвори, в які угвинчені штуцери повітряних клапанів 3.
На верхньому фланці корпусу через гумову прокладку 2 кріпиться шістьма болтами 7 електродвигун 10. У верхній частині ванни в отворі вмонтовується пластмасова втулка 4 з шістьма клемами, яка служить для підведення живлення на катушку збудження реле і подачі командних струмів на катушки управління.
Підведення живлення до рульової машинки здійснюється за допомогою 14 – контактної штепсельної вилки 5, закріпленої на ковпачку 6, який одночасно є кожухом, що оберігає від механічних пошкоджень втулку і що йдуть від неї до вилки дроту.
Нелінійності, є в будь-якому реальному приводі, можуть істотно впливати на його динамічні властивості, зокрема на стійкість.
Цей вплив виявляється в наступному: привод, стійкий і має достатній запас стійкості в лінійному наближенні, може виявитися не стійким або не володіючим тим запасом стійкості, який очікується. Такий вплив надають частіше за все «петлеві нелінійності (люфт, гістерезис), але при деяких положеннях в структурі приводу до цього ж ефекту можуть привести і однозначні нелінійності, наприклад навіть такі, як зона нечутливості
В приводі можуть з'явитися принципово нові типи руху, які не можуть існувати в лінійних системах і тому не можуть бути навіть якісно пояснені з позиції лінійної моделі. До таких рухів відносяться в першу чергу автоколивання. Автоколивання можуть викликати ті ж нелінійності, які викликають зменшення запасу стійкості. В одноконтурних системах – це петлеві нелінійності, в неодноконтурних – однозначні.
6.1.2 Складання переліку робіт по темі
Тема – це комплекс робіт по виконанню договору (замовлення) на розробку виробу, програмного забезпечення або НДР.
Тема НДР ділиться на стадії. Стадії діляться на етапи і роботи, що деталізуються. В практиці використовуються різні ступені деталізації. Переліки робіт формуються з використанням стандартів державних, галузевих і окремих підприємств.
Тема, що розглядається в даному дипломному проекті, є самостійною НДР прикладного характеру. Тому на неї складається свій перелік робіт. Як основа прийнятий типовий перелік стадій і етапів. Перелік робіт з вказівкою трудомісткості етапів представлений в таблиці 6.1.
6.1.3 Розрахунок трудомісткості етапів
Найважливішою групою планових показників є трудомісткості робіт.
Трудомісткість робіт – це основний розрахунковий показник НДР, залежить від змісту, складнощі, об'ємів конкретних робіт і впливає на всі інші показники – тривалості і терміни робіт, кількість виконавців і їх завантаження.
Для визначення планових показників НДР застосовуються різні методи розрахунку і відповідні їм нормативно-довідкові дані.
Для розрахунку комплексного плану по темі НДР можуть застосовуватися різні методи розрахунку планових показників. Всі вони є укрупненими в порівнянні з розрахунком в серійному виробництві.
Для розрахунків застосують метод експертних оцінок, оскільки тема НДР представляє значну складність.
Для вживання методу структурних коефіцієнтів значення показника всієї роботи або її частини повинне бути заздалегідь розраховано іншим методом.
Даний метод заснований на використовуванні досвіду кваліфікованих фахівців. Метод експертних оцінок застосовуємо для стадії 4 і структурних коефіцієнтів для інших стадій і етапів.
Для даної роботи застосований індивідуальний метод експертного опиту, який прийнято вважати найраціональнішим. Суть його полягає в тому, що від кожного експерта незалежно від інших одержують оцінки кожного показника і математично обробляють їх для встановлення єдиної оцінки.
Трудомісткість стадії 4 приймаємо 210 люд-дні.
Одержана трудомісткість стадій і етапів, спочатку визначена по рекомендації кваліфікованих фахівців-експертів, приведена в таблиці 6.1.
Далі трудомісткість кожного етапу проектування визначається за допомогою вживання структурних коефіцієнтів (таблиця 6.1).
6.2 Виконавці і тривалість робіт
Підприємства – учасники НДР по виконуваних функціях діляться на замовників, розробників, виготівників, споживачів
Останніми роками все більше використовуються нові форми виконання НДР: малі підприємства, тимчасові творчі колективи (ТТК), що виконують самостійні замовлення на тему або її окремі етапи. Такі колективи формуються з фахівців різних професій (радисти, конструктори, технологи, робочі, економісти і т.д.) і підкоряються керівнику теми.
В даному дипломному проекті доцільно використовувати досвід організацій ВТК. Це дасть можливість одержати практичні навики підбору кадрів. Детально визначити склад і кількість необхідних виконавців, розставити їх по роботах, скласти календарний графік для кожного виконавця, вирішити питання про оплату праці.
Після складання переліку робіт по темі і розрахунків трудомісткості визначають необхідний склад і кількість виконавців. При організації ВТК такий аналіз роблять детально для кожної окремої роботи.
Підбір і розстановка виконавців здійснюється згідно наступному плану:
1) Проглядаємо весь перелік робіт і розділяємо їх на власні роботи співвиконавців.
2) Аналізуємо зміст робіт і визначаємо необхідні спеціальності виконавців.
3) Визначаємо необхідну кваліфікацію виконавців. Кваліфікація виконавця залежить від складності виконуваної роботи.
4) Визначаємо для кожної роботи необхідну кількість виконавців (фронт робіт).
5) При розстановці виконавців по роботах звертаємо увагу на спеціалізацію людей, їх навики по виконанню певних робіт.
6) Тривалості робіт обчислюються, якщо відомі трудомісткість робіт і кількість зайнятих на ній людина (таблиця 6.1).
7) Аналізуємо завантаження виконавців (цей аналіз виконується при розробці мережних графіків і графіків завантаження – див. наступний розділ).
Список необхідних виконавців оформляємо в таблицю, де кожному виконавцю привласнюється код (для спрощення оформлення переліку робіт, мережних графіків і графіків завантаження) (таблиця 6.2).
Таблиця 6.1 Структура трудомісткості стадій і етапів НДР
| №стадії | Найменування стадій і етапів | Трудомісткість | Виконавці | Тривалість дні (округлий) | |||
| Структурні коефіцієнти% |
Трудомісткість чол-ні |
Посада (код) | К-ть чол. | ||||
| Стадії в загальній трудомісткості теми | Етапів в стадії | ||||||
| 1 | Розробка технічного завдання на проведення НДР | 4 | |||||
| Пошук літератури по заданій темі | 25 | 3,75 | 04 | 1 | 4 | ||
| Огляд і аналіз літературних джерел | 10 | 1,5 | 02, 03 | 2 | 1 | ||
| Патентний пошук | 15 | 2,25 | 04 | 1 | 2 | ||
| Пошук аналогів в мережі Internet | 45 | 6,75 | 03, 04 | 2 | 3 | ||
| Узгодження і затвердження ТЗ | 5 | 0,75 | 01,02 | 2 | 1 | ||
| Разом | 100 | 15 | 11 | ||||
| 2 | Розробка технічної пропозиції | 6 | |||||
| Аналіз ТЗ | 3 | 0,66 | 03, 04 | 2 | 1 | ||
| Проведення патентних досліджень | 15 | 3,3 | 01 | 1 | 3 | ||
| Огляд і аналіз науково-технічної інформації | 10 | 2,2 | 02 | 1 | 2 | ||
| Вибір і обгрунтовування напрямів проведення досліджень | 40 | 8,8 | 01, 02, 03 | 3 | 3 | ||
| Розробка рекомендацій по методиці проведення досліджень | 10 | 2,2 | 01 | 1 | 2 | ||
| Оформлення звіту по ТП | 20 | 4,4 | 04 | 1 | 4 | ||
| Узгодження і затвердження ТП | 2 | 0,44 | 01, 04 | 2 | 1 | ||
| Разом | 100 | 22 | 16 | ||||
| 3 | Отримання початкової математичної моделі | 12 | |||||
| Розробка методики моделі | 10 | 4,4 | 02, 03 | 2 | 2 | ||
| Визначення етапів рішення | 15 | 6,6 | 01, 02 | 2 | 3 | ||
| Проведення теоретичних досліджень | 10 | 4,4 | 03, 04 | 2 | 2 | ||
| Формування початкової розрахунково-кінематичної схеми | 25 | 11 | 04 | 1 | 11 | ||
| Розробка математичної моделі об'єкту дослідження | 25 | 11 | 01 | 1 | 11 | ||
| Отримання початкових виразів для моделі системи | 5 | 2,2 | 01 | 1 | 2 | ||
| Проведення (при необхідності) додаткових пошуків методик розрахунку | 10 | 4,4 | 03 | 1 | 4 | ||
| Разом | 100 | 44 | 35 | ||||
| 4 | Проведення теоретичних і експериментальних досліджень | 57 | |||||
| Розробка методики проведення досліджень | 10 | 21 | 01,02,03 | 3 | 7 | ||
| Проведення теоретичних досліджень | 10 | 21 | 02,03 | 2 | 7 | ||
| Розробка методики проведення експерименту | 30 | 63 | 02, 03 | 2 | 31 | ||
| Підготовка експериментальних зразків і устаткування для досліджень | 20 | 42 | 03,04 | 2 | 21 | ||
| Розробка методики проведення досліджень | 10 | 21 | 01,02,03 | 3 | 7 |
Таблиця 6.2. Список виконавців
| Код виконавців | Посада | Оклад в місяць | Денний |
| 01 | Керівник НДР | 1200 | 54,54 |
| 02 | Старший науковий співробітник | 1000 | 45,45 |
| 03 | Молодший науковий співробітник | 950 | 43,18 |
| 04 | Інженер-дослідник 1-ї категорії | 900 | 40,9 |
6.3 Розробка мережного графіка, побудова лінійної карти мережі, графіка розвантаження виконавців
Мережний графік на тему розробляють після складання переліку робіт, який дозволяє прогнозувати і аналізувати хід робіт, аналізувати і обґрунтовувати завантаження виконавців, а потім контролювати і регулювати виконання робіт. Мережні графіки складаються з двох основних елементів робіт і подій.
Графік будується так, щоб якомога більше паралельно виконувалося робіт. При такій побудові критичний шлях буде якнайменшим. Також необхідно враховувати, що деякі роботи виконуються одними і тими ж людьми. В таких випадках «запаралелювання» робіт не допустиме.

Малюнок 6.2 – Графічне позначення параметрів подій і робіт
Позначення:
j-слідуюча подія, i-попередня подія, ![]() –ранній термін звершення події,
–ранній термін звершення події, ![]() – пізній термін звершення події,
– пізній термін звершення події, ![]() – тривалість стадії,
– тривалість стадії, ![]() –кількість виконавців,
–кількість виконавців, ![]() – повний резерв,
– повний резерв, ![]() – резерв першого роду,
– резерв першого роду, ![]() – резерв другого роду,
– резерв другого роду, ![]() – вільний резерв. Після побудови першого
варіанту мережного графіка розраховують терміни і резерви подій і робіт,
визначають критичний шлях.
– вільний резерв. Після побудови першого
варіанту мережного графіка розраховують терміни і резерви подій і робіт,
визначають критичний шлях.
Розрахунок параметрів мережного графіка проводиться по наступних формулах:
Ранній термін звершення події:
![]() (6.1)
(6.1)
Пізній термін звершення події:
![]() (6.2)
(6.2)
Де j-слідуюча подія, i-попередня подія.
Повний резерв:
![]() (6.3)
(6.3)
Резерв 1-го роду:
![]() (6.4)
(6.4)
Резерв 2-го роду:
![]() (6.5)
(6.5)
Вільний резерв:
![]() (6.6)
(6.6)
Звичайний мережний графік має недоліки – відсутність масштабу часу, що утрудняє ув'язку термінів подій і робіт з календарним часом, оскільки побудова мережного графіка можлива тільки в масштабі реального часу. Мережний графік представлений на малюнку 6.2 додатку Г.
Самим універсальним і наглядним способом побудови мережного графіка в масштабі часу є карта мережі.
Лінійна карта будується після розрахунку параметрів події і робіт мережного графіка і визначення критичного шляху. На малюнку 6.3 додатку Г представлена лінійна карта мережного графіка. Лінійна карта мережі, залишаючись мережним графіком зі всіма перевагами, отримує переваги і звичайних лінійних графіків – наглядність масштабу часу і календарних термінів початку і закінчення робіт.
6.4 Розрахунок заробітної платні виконавців теми
Заробітна платня виконавців теми складається з основної і додаткової. Основну заробітну платню розраховують з урахуванням посадових окладів (тарифних ставок) виконавців і кількості відпрацьованих днів.
При організації ВТК розрахунки основної заробітної платні доцільно виконувати так, щоб були видні суми заробітної платні по стадіях і одночасно по окремих виконавцях (таблиця 6.3).
Заробітну платню за один робочий день визначають виходячи з місячного посадового окладу і кількості робочих днів в місяці (таблиця 6.2).
В місяці приймається 22 робочі дні. Розміри іншої статі калькуляції визначаються як відсоток від основної заробітної платні. Нижче приведені процентні співвідношення для всієї статі:
Загальні доходи виконавців теми складатимуться з основної і додаткової заробітної платні і премій, одержуваних з фундації матеріального заохочення.
Таблиця 6.3. Розрахунок основної заробітної платні по стадіях теми і виконавцях власних робіт
| Виконавці | 01 | 02 | 03 | 04 | Разом | |||||
| Оклад | 54,5 | 45,4 | 43,1 | 40,9 | ||||||
| Стадії | Кількість днів | Зарплата, грн | Кількість днів | Зарплата, грн | Кількість днів | Зарплата, грн | Кількість днів | Зарплата, грн | Кількість днів | Зарплата, грн |
| ТЗ | 1 | 54,5 | 1 | 45,4 | 2 | 86,2 | 7 | 286,3 | 11 | 472,4 |
| ТП | 6 | 327 | 3 | 136,2 | 2 | 86,2 | 5 | 204,5 | 16 | 753,9 |
| Отримання початкової мат. моделі | 14 | 763 | 2 | 90,8 | 6 | 258,6 | 13 | 531,7 | 35 | 1644,1 |
| Проведення теор. і експер. досліджень | 6 | 327 | 31 | 1407,4 | 44 | 1896,4 | 13 | 531,7 | 94 | 4162,5 |
| Оформлення результатів НДР | 13 | 708,5 | 12 | 544,8 | 6 | 258,6 | 1 | 40,9 | 32 | 1552,8 |
| Синтез | 0 | 0 | 0 | 0 | 0 | 0 | 11 | 449,9 | 11 | 449,9 |
| Аналіз | 0 | 0 | 8 | 363,2 | 7 | 301,7 | 0 | 0 | 15 | 664,9 |
| Оформлення записки і упроваджен-ня результ. НДР | 7 | 381,5 | 0 | 0 | 0 | 0 | 0 | 0 | 7 | 381,5 |
| Разом | 47 | 2561,5 | 57 | 2587,8 | 67 | 2887,7 | 51 | 2085,9 | 221 | 10082 |
Таблиця 6.4. Загальні доходи виконавців власних робіт
| № п/п | Оклад в місяць | Денний | Кіл днів | Основна ЗП | Додаткова | Сума |
| 01 | 1200 | 54.5 | 47 | 2561,5 | 256,15 | 2817,65 |
| 02 | 1000 | 45.4 | 57 | 2587,8 | 258,78 | 2846,56 |
| 03 | 950 | 43.18 | 67 | 2893,06 | 289,3 | 3182,36 |
| 04 | 900 | 40,9 | 51 | 2085,9 | 208,59 | 2294,49 |
Таблиця 6.5. Кошторисна калькуляція на тему НДР (грн)
| Стадії | Основна заробітна платня | Додаткова заробітна платня (15%) | Відрахування на соцстрахування (37,5%) | Невигідні витрати | Загальні витрати |
| ТЗ | 472,4 | 70,86 | 203,72 | 472,4 | 1219,38 |
| ТП | 753,9 | 113,09 | 325,12 | 753,9 | 1946 |
| Отримання початкової мат. моделі | 1644,1 | 246,62 | 709,02 | 1644,1 | 4243,83 |
| Проведення теор. і експер. досліджень | 4162,5 | 624,38 | 1795,08 | 4162,5 | 10744,45 |
| Оформлення результатів НДР | 1552,8 | 232,92 | 669,65 | 1552,8 | 4008,17 |
| Синтез | 449,9 | 67,49 | 194,02 | 449,9 | 1161,3 |
| Аналіз | 664,9 | 99,74 | 286,74 | 664,9 | 1716,27 |
| Оформлення записки і упровадження результ. НДР | 381,5 | 57,23 | 164,52 | 381,5 | 984,75 |
| Разом | 10082 | 1512,3 | 4347,86 | 10082 | 26024,16 |
6.5Кошторисна калькуляція на тему
При розробці кошторисної калькуляції на тему розраховують кошторис витрат і ціну теми. Витрати при цьому групуються по стадіях.
6.6 Розрахунок ціни теми
В даному дипломному проекті ціна теми приймається як ціна розробника – це мінімально допустима ціна, враховуючи кошторис витрат на розробку теми і прибуток, розрахований по встановленому коефіцієнту рентабельності:
![]() (6.7)
(6.7)
де СЗАГ - загальний кошторис витрат (загальні витрати);
КРЕНТ – коефіцієнт рентабельності (20%);
![]()
В ході виконання економічної частини дипломного проекту був складений перелік робіт по темі і визначені трудомісткості робіт, виконавці робіт, тривалості. Розроблений мережний графік, побудовані лінійна карта мережі, графік завантаження виконавців, зроблений розрахунок фонда заробітної платні виконавців, кошториси витрат і ціни теми.
Таким
чином в розробці теми візьмуть участь 4 виконавців, тривалість виконання робіт
складає 153 днів, ціна теми складає ![]()
7. Забезпечення життєдіяльності і питання екології
7.1 Аналіз шкідливих і небезпечних чинників
В даній дипломній роботі і досліджений сервопривод урахуванням нелінійності. Основним місцем роботи була науково-виробнича дослідницька лабораторія (НВДЛ) №402, кафедри №301. При проведенні робіт в лабораторіях подібного профілю необхідно враховувати питання безпеки праці, попередження травматизму і професійних захворювань, питання правової охорони праці.
В лабораторіях робочий персонал може піддатися дії небезпечних чинників, обумовлених як особливостями роботи (використовування ЕОМ, наявність небезпечної напруги електроживлення, вживання свердлувального верстата з підвищеним рівнем шуму), що проводиться, так і станом робочого приміщення і навколишніх його об'єктів (розміщення в приміщенні або поблизу нього вибухово- і пожежнобезпечних речовин і ін.)
Фізичні чинники дії: підвищений рівень електромагнітного поля; підвищений рівень статичної електрики; недостатня освітленість; підвищена або знижену вогкість повітря; підвищена або знижену температуру повітря; пожежа; поразка електричним струмом.
Психофізичні чинники: перенапруження зорових або слухових аналізаторів; монотонність праці; емоційні перевантаження; утомленість груп м'язів через малу рухливість.
7.2 Розробка заходів щодо зниження впливу шкідливих чинників
Велике значення при проведенні експериментальних робіт має виключення або зменшення дії шкідливих, негативних, небезпечних і вражаючих чинників.
Вимоги до мікроклімату приміщення лабораторії.
З погляду комфортних виробничих умов, атмосфера виробничого середовища повинна мати:
а) певне співвідношення газів, що входять в повітряне середовище;
б) певну температуру;
в) певну вогкість;
г) певний тиск;
д) певну швидкість переміщення.
Рівень тиску і газовий склад повітря в даному виробничому середовищі, тобто в приміщеннях лабораторій, залежать в більшій мірі від стану навколишньої його атмосфери. Але існують і норми запорошеної повітря в приміщенні лабораторій, які необхідно дотримувати для забезпечення збереження здоров'я людини і безперебійної роботи техніки.
Метеорологічні умови в даному виробничому приміщенні визначаються температурою, вогкістю і швидкістю руху повітря. Норми метеорологічних умов на виробництві регламентуються ГОСТ 12.1.005–76 «Повітря робочої зони», де вказано, що при легкій (1а) категорії виконуваних робіт, в робочій зоні лабораторій повинні забезпечуватися допустимі норми температури 18 – 25 °З, відносної вогкості повітря 40 – 60% і швидкості руху повітря в межах 0.2 – 1 м/с.
Для забезпечення необхідної температури і вогкості необхідно обладнати приміщення випробувальної лабораторії приладами центрального або індивідуального опалювання. Для забезпечення заданих метеорологічних умов і чистоти повітря необхідно організувати систему вентиляції приміщення.
Система освітлення.
Освітлення можна розділити на 3 вигляди: штучне; природне; суміщене.
Природне освітлення – створюване світлом неба і сонця (пряме і відображене).
Суміщене освітлення – при якому в світлий час доби недостатнє по нормах природне освітлення доповнюється штучним.
Штучне освітлення може бути класифіковано залежно від розміщення: місцеве (настільна лампа); загальне; комбіноване (місцеве + загальне).
Також застосовується спеціальне штучне освітлення: аварійне; чергове; охоронне і т.д.
Зі всіх видів розглянемо загальне освітлення, яке складається з ламп, укріплених на стелі. Найширше поширення набули лампи двох видів:
А) Лампи розжарювання – мають наступні достоїнства: простота в експлуатації; не вимагають пускових пристроїв; простота виготовлення; і недоліки: низька величина світлової віддачі, порівняльно низький період працездатності, спотворення перенесення кольорів.
Б) Газорозрядні лампи – електричний розряд в середовищі інертного газу. Їх гідність – можливість регулювання спектру. Недоліки: наявність пульсацій, складний механізм, мають потребу в наявності пускових пристроїв.
Вимоги до електробезпеки.
Одним з найвірогідніших і небезпечних чинників, які можуть виникнути в приміщенні випробувальної лабораторії, є поразка електричним струмом. До складу комплексу входить ряд пристроїв, напруга живлення яких небезпечна для життя оператора. Такими пристроями є:
1) ЕОМ – живиться від однофазної мережі змінного струму 220 В;
2) свердлувальний верстат (220 В);
3) паяльники, а також різні вимірювальні прилади (220 В).
Також в приміщенні МУЛ знаходяться обслуговуючі і допоміжні пристрої, які теж можуть стати причиною поразки оператора електричним струмом. До таких пристроїв відносяться: кондиціонери, вентилятори, прилади індивідуального освітлення робочого місця, індивідуального обігріву (в холодну пору року) і ін.
Одним з основних методів запобігання поразки електричним струмом є дотримання правил техніки безпеки.
Шумова безпека.
Шум відноситься до шкідливих чинників виробництва і виникає при механічних коливаннях в твердих, рідких і газоподібних середовищах. Шумом є різні звуки, що заважають нормальній діяльності людини і що викликають неприємні відчуття. Звук є коливальним рухом пружного середовища, сприйманим людським органом слуху. Підвищення звукового тиску негативно впливає на орган слуху; для вимірювання гучності (в децибелах Дб) використовується двушкальний шумомір.
Крім того, існує доведена шкідлива дія інфра- і ультразвуку на людський організм (нижче 20 Гц і вище за 20 кГц частоту відповідно). Хоча коливання не викликають больових відчуттів, вони проводять специфічну фізіологічну дію на організм людини.
Об'єктивно дії шуму виявляються у вигляді підвищення кров'яного тиску, прискореного пульсу і дихання, зниження гостроти слуху, ослаблення уваги, деякі порушення координації руху, зниження працездатності. Суб'єктивно дії шуму можуть виражатися у вигляді головного болю, запаморочення, безсоння, загальної слабкості. Комплекс змін, що виникають в організмі під впливом шуму, останнім часом розглядається медиками як «шумова хвороба».
Як захист від шуму і звуку слід застосовувати нормування рівня шуму, звукоізоляцію, звукопоглинання, спеціальні глушники аеродинамічного шуму, засобу індивідуального захисту.
Вібрація – механічне коливання пружних тіл; при цьому скоюються коливальні рухи. Вібрації з частотою більше 200 Гц небезпечні для людини. Для її зменшення використовують віброізоляції, пружинні опори і підстави, прокладки, килимки.
Пожежна безпека.
При роботі необхідно дотримувати пожежну безпеку. В приміщенні випробувальної лабораторії повинні бути встановлені засоби пожежогасінні і боротьби з вогнем. Забороняється зберігання в приміщенні порожніх пакувальних коробок від устаткування, зайвого легко вспалахующого сміття. Для їди повинна бути обладнана окрема кімната. Забороняється включати електрокип'ятильники, чайники і т.д. в приміщенні лабораторії. Необхідно, щоб кондиціонери, обігрівачі, прилади вентиляційної системи і інші електричні прилади були справні, щоб вони регулярно перевірялися на справність відповідними фахівцями. Повинні бути вільні шляхи евакуації на випадок виникнення пожежі. По можливості приміщення лабораторії повинне бути обладнано пожежною сигналізацією. Працівники лабораторії повинні бути знайомі з правилами поводження із засобами вогнегасіння, які знаходяться в приміщенні. Необхідно, щоб на стендах були доступно і зрозуміло описані правила поведінки при пожежі, правила користування приладами вогнегасіння, засобами захисту при пожежі, планом евакуації, правилами надання першої допомоги при отриманні опіків. Повинен бути так само оформлений документ працівниками підприємства про те, що вони ознайомлені з правилами пожежної безпеки.
![]() - випромінювання.
- випромінювання.
До іонізуючих випромінювань відносяться корпускулярні (альфа, – бета, – нейтральні) і електромагнітні (гамма, рентгенівські, космічні) випромінювання, здатні при взаємодії з речовиною прямо або побічно створювати в ньому заряджені атоми і молекули – іони.
Іонізуючі випромінювання надають несприятливу дію на організм людини, приводячи до важких захворювань, можливий і смертельний результат. Велика небезпека радіоактивного випромінювання полягає в тому, що воно не виявляється органами чуття людини.
Результат поразки залежить від виду випромінювання, дози випромінювання, тривалості дії і індивідуальних особливостей організму.
Забезпечення безпеки працюючих з радіоактивними речовинами здійснюється шляхом встановлення граничнодопустимих доз опромінювання різними видами радіоактивних речовин; вживанням захисту часом або відстанню, проведення загальних заходів захисту, використовування засобів індивідуального захисту. Велике значення має вживання приладів індивідуального і загального контролю для оцінки інтенсивності радіоактивних випромінювань.
Оператор
ЕОМ безпосередньо знаходиться на відстані від 0.5 до 2 м від дисплея, а це
джерело ![]() -частиць.
-частиць.
При
роботі з ![]() -джерелу потрібен захист
від прямої дії
-джерелу потрібен захист
від прямої дії ![]() -частиць і від
гальмівного випромінювання.
-частиць і від
гальмівного випромінювання.
Екрани
для захисту від ![]() -випромінювань доцільно
робити двошарові: з боку джерела застосовується матеріал з малим атомним
номером, щоб гальмівне випромінювання було менш проникаючим, а за ним
поміщається шар матеріалу з великим атомним номером для поглинання гальмівного
випромінювання.
-випромінювань доцільно
робити двошарові: з боку джерела застосовується матеріал з малим атомним
номером, щоб гальмівне випромінювання було менш проникаючим, а за ним
поміщається шар матеріалу з великим атомним номером для поглинання гальмівного
випромінювання.
Загальні вимоги до робочого місця.
Робоче місце оператора повинне відповідати характеру виконуваної роботи і забезпечувати зручні і безпечні умови праці.
Основна задача планування робочого місця полягає в тому, щоб створити об'єктивні передумови для раціональності робочих рухів і робочої пози виконавців. Планування робочого місця повинне ґрунтуватися на обліку антропометричних даних працівників (зростання, довжина рук, довжина ніг). Розміри крупної людини визначають мінімум простори, необхідного для свободи дій, а розміри невеликої людини повинні прийматися при визначенні меж досяжності ручних і ножних органів управління. Крім того, необхідно враховувати вплив одягу, який накладає додаткові обмеження на свободу рухів людини.
Робоче сидіння повинне бути зручним для виконання планованих робочих операцій. Воно повинне мати необхідні розміри і допускати регулювання не тільки по висоті, але і по положенню, коли його вживання вимагає рухливості. Робочий стіл повинен забезпечувати разом з робочим сидінням таке положення корпусу, при якому навантаження розподілено оптимальним чином на всі м'язи, що беруть участь в підтримці тіла і дотримання правильної постави при роботі. Після того, як на підставі даних антропометрії вибрані оптимальні габарити робочого простору, необхідно організувати всі елементи робочого місця відповідно до особливостей діяльності людини. При організації робочого місця, необхідно враховувати економне використовування виробничих площ. На кожного працівника повинно доводитися не менше 4,5 м2 виробничої площі при висоті приміщення не менше 3,2 м. Слід також мати у вигляді оснащення робочого місця меблями і пристосуваннями, сконструйованими відповідно до рекомендацій психофізіології праці. Безпека робочого місця повинна відповідати вимогам виробничої санітарії, техніці безпеки і протипожежної техніки.
7.3 Система вентиляції
Задачею вентиляції є забезпечення чистоти повітря і заданих метеорологічних умов у виробничих приміщеннях. Вентиляція досягається видаленням забрудненого або нагрітого повітря з приміщень і подачею в нього свіжого повітря.
За способом переміщення повітря вентиляція буває з природним імпульсом (природної) і з механічним (механічної). Можливе також поєднання природної і механічної вентиляції (змішана вентиляція).
Залежно від того, для чого служить система вентиляції, – для подачі (притоки) або видалення (витяжки) повітря з приміщення або (і) для того і іншого одночасно, вона називається приточуванням, витяжною або приточування-витяжною.
По місцю дії вентиляція буває загальнообмінною і місцевою.
Дія загальнообмінної вентиляції заснована на розбавленні забрудненого, нагрітого, вологого повітря приміщення чистим повітрям до гранично допустимих норм. Цю систему вентиляції найбільш часто застосовують у випадках, коли шкідливі речовини, теплота, волога виділяються рівномірно по всьому приміщенню. При такій вентиляції забезпечується підтримка необхідних параметрів повітряного середовища у всьому об'ємі приміщення.
У виробничих приміщеннях, в яких можливе раптове надходження в повітря робочої зони великих кількостей шкідливої пари і газів, разом з робочою передбачається пристрій аварійної вентиляції.
Природна вентиляція.
Повітрообмін при природній вентиляції відбувається внаслідок різниці температур повітря в приміщенні і зовнішнього повітря, а також в результаті дії вітру. Різниця температур повітря всередині і зовні приміщення, а, отже, і різницю густини викликають надходження холодного повітря в приміщенні і витіснення з нього теплого повітря. При дії вітру із завітреної сторони будівель створюється знижений тиск, унаслідок чого відбувається витяжка теплого або забрудненого повітря з приміщення; з навітряного боку будівлі створюється надмірний тиск, і свіже повітря поступає в приміщення на зміну повітрю, що витягається.
Природна вентиляція може бути організованою і неорганізованою. При неорганізованій вентиляції надходження і видалення повітря відбувається через нещільність і пори зовнішніх огорож (інфільтрація), через вікна, кватирки, спеціальні отвори. Організована природна вентиляція виробничих приміщень здійснюється аерацією і дефлекторами.
Аерація здійснюється в холодних цехах за рахунок вітрового тиску, а в гарячих цехах за рахунок сумісної або роздільної дії гравітаційного і вітрового тиску. Перевагою аерації є те, що великі об'єми повітря подаються і віддаляються без вживання вентиляторів і воздуховодів. Разом з перевагами аерація має істотні недоліки, а саме: в літній час ефективність аерації може значно знижуватися унаслідок підвищення температури зовнішнього повітря, особливо в безвітряну погоду; крім того, поступаюче в приміщення повітря не обробляється.
Вентиляція за допомогою дефлекторів. Дефлектори є насадки, встановлювані на витяжних воздуховодах і використовуючі енергію вітру. Дефлектори застосовують для видалення забрудненого або перегрітого повітря з приміщень порівняно невеликого об'єму, а також для місцевої вентиляції.
Механічна вентиляція.
В системах механічної вентиляції рух повітря здійснюється вентиляторами і в деяких випадках ежекторами. Механічна вентиляція буває: приточування, витяжна і приточування-витяжна, вони відрізняються подачею і відтоком повітря.
Вентилятори – це воздуходувні машини, що створюють певний тиск і службовці для переміщення повітря при втратах тиску у вентиляційній мережі. Найпоширенішими є осьові і радіальні вентилятори.
Ежектори застосовуються у витяжних системах в тих випадках, коли необхідно видалити дуже агресивне середовище, пил, здібний до вибуху не тільки від удару, але і від тертя, або легко вспалахаючі вибухонебезпечні гази.
Кондиціонування повітря – це створення і автоматична підтримка в приміщеннях незалежне зовнішніх умов постійних або змінюються за певною програмою температури, вогкості, чистоти і швидкості руху повітря, найсприятливішої для людей або що вимагаються для нормального протікання технологічного процесу. Тому на промислових підприємствах кондиціонування повітря застосовується або для забезпечення комфортних санітарно-гігієнічних умов, створення яких звичайною вентиляцією неможливе, або як складова частина технологічного процесу.
Очищення повітря від домішок може проводитися як при подачі повітря, так і при видаленні з нього забрудненого повітря. В першому випадку забезпечується захист працюючих у виробничих приміщеннях, а в другому – захист навколишньої атмосфери.
7.4 Розрахунок загально обмінної вентиляції
Розглянемо тепловиділення деякими джерелами:
1. Тепловиділення від устаткування, що приводиться в дію електродвигунами, і від комп'ютерної техніки, ккал/ч:
Q1 =860 · NY · n + 860 · Qпк· nпк (7.1)
NУ - номінальна потужність двигуна, кВт;
n – кількість двигунів;
Qпк - тепловиділення персонального комп'ютера;
nПК – кількість персональних комп'ютерів.
Q1 =860 · 0.3 · 1 + 860 · 0.2 · 2 = 602 (ккал/ч).
2. Тепловиділення від штучного освітлення, ккал/ч:
Q2 = 860 · Nосв (7.2)
Nосв – сумарна потужність джерел, кВт;
Q2 = 860 · 0.8 = 688 (ккал/ч).
3. Тепловиділення від людей:
Q3 =Qл · nл (7.3)
Qл – тепловиділення від людей, ккал/ч
nЛ – кількість людей.
Q3 = 55 · 4 = 220 (ккал/ч).
3. Надходження тепла через світлові отвори за рахунок сонячної радіації, ккал/ч:
Q4 =F · q (7.4)
F – площа світлового отвору, м2;
q – кількість тепла вноситься сонячною радіацією через світлові отвори, ккал/(ч*м2).
Q4= 240 · 12 = 2880 (ккал/(ч*м2)).
4. Тепловтрати через будівельні огорожі, ккал/ч:
Qтп=k · F · (Тп – Тн) (7.5)
k – коефіцієнт теплопередачі огорожі ккал/(ч·м2 · До)
F – поверхня огорожі, м2
Тп – температура
зовнішня, До![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Тн – температура в приміщенні, До.
Qтп = 1.06 · 15 · 14 = 222,6 (ккал/ч).
Кількість надмірного тепла в робітниках приміщення
![]() (7.6)
(7.6)
Q = 602 + 688 + 220 + 2880 – 222,6 = 4167,4 (ккал/ч).
За наявності надмірного тепла в робочих приміщеннях розрахуємо кількість повітря, необхідного для створення нормальних умов праці, м3/ч:
![]() (7.7)
(7.7)
C – питома теплоємність повітря, 0.24 ккал/(кг·К)
у – об'ємна вага повітря, що поступає в приміщення, кг/м3.
L = ![]() =1046,66.
=1046,66.
Кратність обміну повітря:
K = ![]() (7.8)
(7.8)
VП – об'їм приміщення, м3.
K = ![]() = 23,26.
= 23,26.
Кратність обміну повітря менше 30, отже, вентиляція в приміщенні природна і немає необхідності у вентиляторі.
7.5 Можливі надзвичайні ситуації в районі робочого місця або вузу
Надзвичайна ситуація – порушення нормальних умов життя і діяльності людей на об'єкті або території, викликане аварією, катастрофою, стихійною бідою або іншою небезпечною подією, яка може привести або привело до загибелі людей, їх поразки і значних матеріальних втрат.
В районі робочого місця або вузу, в якому розташована дослідницька лабораторія (МУЛ) №402, де експлуатується додаток, що розробляється, можливі наступні надзвичайні ситуації:
– техногенного характеру: пожежі і неспровоковані вибухи (10200); аварії з викидом або загрозою викиду сильнодіючих отруйних речовин (10301); наявність в навколишньому середовищі шкідливих речовин з концентраціями, перевищуючими ПДК (10400); раптове руйнування будівель і споруд (10600); аварії на системах зв'язку і телекомунікаціях (10900).
– природного характеру: небезпечні геологічні явища (20100); небезпечні метеорологічні явища (20200); інфекційні захворювання людей (20600); отруєння людей (20700);
– соціально-політичного характеру: озброєні напади, захоплення і затримання військових об'єктів, або реальна загроза здійснення таких акцій (30100); установка вибухового пристрою в суспільному місці, установі, організації, на підприємстві в житловому секторі, на транспорті (30400).
– військового характеру, пов'язані з наслідками вживання зброї масової поразки або звичайних засобів поразки, під час яких виникають вторинні вражаючі чинники населення в результаті руйнування атомних і гідроелектростанцій, складів і укриттів, радіоактивних і токсичних речовин і відходів, нафтопродуктів, вибухівки, транспортних і інженерних телекомунікацій.
7.6 Прогнозування наслідків надзвичайної ситуації (НС), викликаної пожежею
Розглянемо надзвичайну ситуацію техногенного характеру – пожежа на стоянці автомобілів (код сфери виникнення 10203).
Горюча речовина – бензин, m=300 кг.
Первинний вражаючий чинник даної надзвичайної ситуації – світлове випромінювання пожежі.
Рівень надзвичайної ситуації – місцевий.
Наслідки ЧС: поразки людей (опіки, пошкодження органів зору і т.д.); спалах і інші пошкодження будівлі, устаткування і інших матеріальних об'єктів.
Радіус зовнішньої межі зони можливих суцільних пожеж:
 (7.9)
(7.9)
де Q – маса «запасів горючої речовини», кг;
HТ – питома теплота згоряє горючої речовини, Дж/кг;
IСГ – густина потоку потужності світлового випромінювання первинної пожежі на зовнішній межі зони можливих суцільних пожеж, Вт/м2;
ТВИГ – час вигоряння «запасів горючої речовини».
Час вигоряння «запасів горючої речовини»:
![]() (7.10)
(7.10)
де НГВ – товщина шару «запасів горючої речовини», розлитої на поверхні, мм;
VВИГ – лінійна швидкість вигоряння горючої речовини, мм/с;
Підставляючи час вигоряння «запасів горючої речовини» у формулу 6.9, визначаємо радіус зовнішньої межі зони суцільних пожеж:
 (7.11)
(7.11)
знаменник 2·3,14·30·10:3·785,7 чисельник 300 =6,9
Радіус зовнішньої межі зони можливих окремих пожеж рекомендується визначати із співвідношення:
 (7.12)
(7.12)
де Q – маса «запасів горючої речовини», кг;
HТ – питома теплота згоряє горючої речовини, Дж/кг;
JОТД – густина потоку потужності світлового випромінювання первинної пожежі на зовнішній межі зони можливих окремих пожеж, Вт/м2.
Радіус «калюжі», розлитого по поверхні горючої речовини:
![]()
![]() (7.13)
(7.13)
де ![]() – маса «запасів
горючої речовини», кг;
– маса «запасів
горючої речовини», кг;
r – питома вага рідкої горючої речовини, кг/м3.
Вважаємо, що всі люди, які знаходяться у межах зони суцільних пожеж, можуть одержати опіки відкритих ділянок шкіри першого, другого, третього і четвертого ступеня, поразка органів зору (у вигляді тимчасового засліплення) і навіть загинути.
Знайдемо людські втрати, використовуючи співвідношення:
М загальні втрати = N спл =50 (чол.) (7.14)
де N спл – кількість людей, які у момент виникнення пожежі можуть працювати в зоні можливих суцільних пожеж, чіл.
Знайдемо санітарні втрати в результаті пожежі:
М сан =0,95×М загальні втрати = 25 (чол.) (7.15)
Втрати основних фундацій:
![]() (7.16)
(7.16)
Втрати ОФ=5%.
Можливий характер і об'єм рятувальних і інших невідкладних робіт в зоні ЧС, який необхідно буде провести для ліквідації її наслідків:
– розвідка фактичної пожежної і хімічної обстановки на території ЧС, зокрема на ділянці робіт рятувальників;
– локалізація і гасіння окремих пожеж на ділянках суцільних пожеж;
– пошук потерпілих;
– надання першої допомоги потерпілим і евакуація їх до медичних установ;
– виведення персоналу в безпечні райони;
– локалізація аварій на електроенергетичній мережі інституту, її ремонт і відновлення.
Малюнок 7.1 – Карта очікуваної інженерної обстановки, що виникла в результаті пожежі на стоянці автомобілів, бензин, m=300 кг
Охорона здоров'я проектувальників, забезпечення безпеки умов праці, ліквідація професійних захворювань і виробничого травматизму складає одну з головних турбот керівників дослідницькими інститутами.
В даному розділі був проведений аналіз шкідливих і небезпечних чинників, розроблені заходи щодо зниження впливу шкідливих чинників. Розглянута система вентиляції. Проведений розрахунок загально обмінної вентиляції для лабораторії. В результаті розрахунків одержали, що вентиляція в приміщенні природна і немає необхідності у вентиляторі.
Виявлені можливі надзвичайні ситуації в районі робочого місця або організації. Спрогнозовані соціально-економічні наслідки надзвичайної ситуації техногенного характеру, заподіяної пожежею.
Висновок
В даній дипломній роботі був досліджений сервопривіду с урахуванням не лінійності. В основній частині за допомогою методу гармонічної лінеаризації системи диференціальних рівнянь, що описують динаміку об'єкту управління і з урахуванням виду руху, заданого в ТЗ, була одержана математична модель.
За допомогою програмного пакету MATLAB був проведений аналіз динамічних характеристик об'єкту управління. Аналіз результатів вживання методу управління був проведений в середовищі SIMULINK шляхом моделювання системи в цілому.
В конструкторській частині вироблена розробка печатного вузла спеціалізованого обчислювача.
В науково-дослідницькій практичній частині роботи досліджувався впливу зон нелінійності на показники якості сервопривіду.
В науково-дослідницькій теоретичній частині роботи визначалая критична добротність сервопривіду при заданих нелінійних ділянках. Визначалась допустима амплітуда сигналу при заданих нелінійностях, для підприємств які досліджують даний сервопривід.
Задачею експериментальної частини було, одержати навики дослідження статичної і динамічних характеристик електрогідравлічної рульової машинки (ЕГРМ), з використанням реальної установки (в аудиторії 402 радіокорпусу). Як об'єкт управління використовували електрогідравлічний рульовий привід.
В економічній частині розробили перелік робіт по проведенню НДР, підібрали і розстановили виконавців, розрахували тривалості і рудмісткості робіт. Розробили мережний графік ходу робіт, розрахували параметри подій і робіт, визначення тривалості і ціну теми.
В частині БЖД враховані і нормовані всі чинники, негативно впливаючі на людину при виготовленні і експлуатації радіоелектронного устаткування.
Провести аналіз безпеки системи «людина-техніка-середовище», що розробляється, і обґрунтували можливі шляхи запобігання або ослаблення впливу небезпечних і шкідливих виробничих чинників на людину.
Всі результати розрахунків, одержані в ході роботи, задовольняю вимогам ТЗ.
Список використаної літератури
1. Рабинович Л.В. Устойчивость и автоколебания нелинейных следящих приводов. – МАИ, 1997. – 45 с.
2. Рабинович Л.В и др. Проектирование следящих систем. – М.: Машиностроение, 1969. – 40 с.
3. Метод гармонической линеаризации в проектировании нелинейных систем автоматического управления/ Под.ред Топчеева Ю.И. – М: Машиностроение, 1970. – 120 с.
4. Сюд. Майер А. Современная теория автоматического применения и ее применение. – М.: Машиностроение, 1972. – 435 с.
5. Функции MATLAB в задачах анализа и проектирования систем управления / Соколов Ю.Н. – Учебное пособие. – X.:Нац.аэрокосм. ун-т, «Харьк. авиац. ин-т», 2004. – 93 с.
6. Первозванский А.А. Случайные процессы в нелинейных автоматических системах. – М: Гос.изд. Физмат, литературы, 1962. – 348 с.
7. Гамынин Н.С. Основы следящего гидравлического привода. – М.: Обо-ронгиз, 1962.-293с
8. Гидропривод и гидропневмоавтоматика, – Киев: Техника, 1989, – 130 с.
9. Симонов В.Ф. Теория нелинейных оптимальных и адаптивных систем автоматического управления. – Харьков: 1981. – 117 с.
10. Кулик А.С., Пищухина О.А., Фирсов С.Н. Отказоустойчивое управление пневматическим сервоприводом. – Харьков «ХАИ»:2004. – 125 с.
11. Цыпкин Я.З. Основы теории автоматических систем. – М.: Наука, 1977. -560 с.
12. Попов Е.П. Теория нелинейных систем автоматического регулирования и управления. – М.: Наука, 1979. – 256 с.
13. Кулик А.С., Гордин А.Г., Кортунов В.И., Симонов В.Ф., Соколов Ю.Н. – Харьков: Нац. аэрокосмич. ун-т «ХАИ», 2001. – 224 с.
14. Кулик А.С. Основы моделирования систем: Учеб. пособие. – Х.:Харьк. авиац. ун-т, 1998–90 с.
15. Теория автоматического управления. Под. ред. А.С. Шаталова. – М.: Высш. школа, 1977. – 448 с.
16. Кулик А.С., Фирсов С.Н. Построение диагностических моделей при разработке динамического обеспечения пневматического сервопривода // Авиационно-космическая техника и технология. – Х: Нац. аэрокос. ун-т. «ХАИ». -2002. – Вып. 54. 40–53 с.
17. Теория автоматического управления. Ч.П. Теория нелинейных и специальных систем автоматического управления / Под. ред. А.А. Воропова. – М.: Высш. школа, 1977. – 288 с.
18. Бесекерский В.А., Орлов В.П., Полонская Л.В. Федоров СМ. Проектирование следящих систем малой мощности. – М.: Судпромгиз, 1957. – 430 с.
19. Гамынин Н.С., Жданов Ю.К., Климашин А.Л. Динамика быстродействующего гидравлического привода. – М.: Высш. школа, 1970. -452 с.
20. Азенберг Я.Е., Борушко Ю.М. Динамические свойства ЛА с ЖРД и требования к автомату стабилизации. – Харьков, 1984. – 364 с.
21. Башта Т.М. Расчет и конструкции самолетных гидравлических устройств.-М.: Оборонгиз, 1961. – 345 с.
22. Гамынин Н.С. Уравнение движения и частотные характеристики гидропривода с объемным регулированием. Труды МАИ, вып. 117-М.: Оборонгиз, 1960. – 321 с.
23. Ермаков В.В. Основы расчета гидропривода. – М.: Машгиз, 1951.-234с
24. Литвин-Седой М.З. Гидравлический привод в системах автоматики. – М.: Машгиз, 1956. – 349 с.
25. Попов В.К. Основы электрпривода. – М.: Госэнергоиздат, 1951. -221 с.
26. Солодовников В.В. и др. Основы автоматического регулирования, – М.: Машгиз, 1954. – 456с
27. Барковский В.В., Захаров В.Н., Шаталов А.С. Методы синтеза систем управления. – М. Машиностроение, 1969. – 328с
28. Кузоков Н.Т. Теория автоматического регулирования, основанная на частотных методах. – М.: Оборонгиз, 1970 – 438 с.
29. Хаймович Е.М. Гидроприводы и гидроавтоматика станков. – М.: Машгиз, 1959. – 432 с.
30. Чиликин М.Г., Корытин А.М., Прокофьев В.Н. Силовой электрогидропривод. – М.: Госэнергоиздат, 1955. – 325 с.
31. Лурье А.И. Некоторые нелинейные задачи теории автоматического ре-гулирования. – М.: Гостехиздат, 1951. – 432 с.
32. Попов Е.П. Об оценке качества нелинейных автоматических систем при случайных помехах., Автоматика и телемеханика, Т.ХХ, №10,1959. – 125 с.
33. Летов A.M. Устойчивость нелинейных регулированных систем. – М. Тостехиздат, 1955 -496 с.
34. Попов Е.П. Теория нелинейных систем автоматического регулирования и управления. – М.: Наука, 1979 – 256 с.
35. В.Г. Григорьев, Д.В. Григорьев А.с. №1794804 (СССР). Рулевой привод управляемой аэродинамической поверхности летательного аппарата. – Опубл. в Б.И., 1993, №6.
36. И.Ф. Баныкин, В.Н. Глот, B.C. Луняков А.с. №20255414 (Россия) Способ автоматической посадки самолета – Опуб. в Б.И., 1992, №10.
37. Г.Н. Громов, В.В. Гаврищук. А.с. №289027 (СССР) Способ автоматической посадки самолета – Опуб. в Б.И., 1985, №4
38. B.I. Соколов А.с. №23347 (Украша) Слщкуючий пдропривщ – Опубл. в Б.И., 1998, №4