Лабораторная работа: Исследование динамических свойств моделей типовых звеньев систем автоматического управления
Лабораторная работа
«Исследование динамических свойств моделей типовых звеньев систем автоматического управления по их частотным характеристикам»
Введение
Цель работы – изучение экспериментального метода и аппаратных средств определения амплитудно-фазовых частотных и динамических характеристик типовых звеньев.
1. Теоретические сведения
Для сложного объекта автоматического регулирования не всегда удается произвести исследование с помощью аналитических методов ввиду того, что заранее неизвестны математические модели, параметры объекта или существуют значительные нелинейности в объекте. В этом случае применим экспериментальный метод построения частотных характеристик исследуемого объекта, базирующийся на том, что если на его вход подать сигнал синусоидальной формы с частотой и амплитудой, равной единице, то на выходе в установившемся режиме получится тоже синусоидальный сигнал с той же частотой но с другими амплитудой и фазой.
Синусоидальные функции могут выражаться в векторной форме показательными функциями с мнимым аргументом:
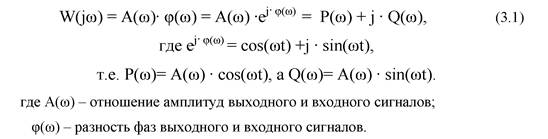
Величина W(j) называется комплексным коэффициентом передачи или усиления, представляющим комплексное число, модуль которого равен отношению амплитуд выходного и входного сигналов при неизменной частоте входного сигнала. Если положить =0, то получается коэффициент усиления или коэффициент передачи системы или звена.
Процесс регулирования Y(t) складывается из двух частей: переходного процесса YПП(t) и установившегося процесса YУСТ(t):
Y(t) = YПП(t) + YУСТ(t).
Математически переходный процесс определяется общим решением однородного уравнения (1.1), при Х(t)=0, а установившийся процесс – частным решением уравнения неоднородного уравнения (1.1), при заданной правой части Х(t). С точки зрения теоретической механики переходный процесс есть свободное движение системы, а установившийся процесс – вынужденное движение. С точки зрения теории колебаний первое есть собственные колебания, а второе – вынужденные колебания, но это ни в коем случае не означает, что переходный и установившийся процессы всегда по форме будут колебательными. Для получения переходной характеристики подают мгновенно скачком на вход звена некоторое постоянное значение вида:
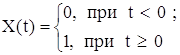
и наблюдают переходный процесс (свободные колебания) на выходе звена. На коммутационном поле АВМ эта модель входного воздействия реализуется на масштабном операционном усилителе с изменяемым согласно варианта задания коэффициентом усиления:

Такое идеальное звено не обладает инерционностью и мгновенно дает на выходе величину:
![]() (1.2)
(1.2)
Если на вход звена или системы подать сигнал синусоидальной формы с частотой ω вида:
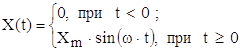 (1.3)
(1.3)
то на выходе в установившемся режиме получится тоже синусоидальный сигнал с той же частотой ω, но с другими амплитудой и фазой (наблюдение вынужденных колебаний звена).
2 Экспериментальная часть
Составим таблицу значений 2.1
Построим график апериодического звена второго порядка, рисунок 2.1 и с помощью данного графика получим значение T2.
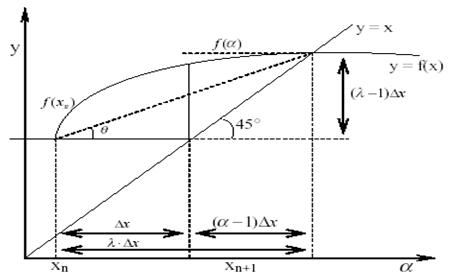
Рисунок 2.1 – график апериодического звена второго порядка
Вычислив А(ω) и φ(ω), построим годограф, рисунок 2.2.
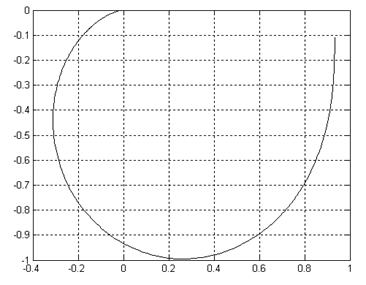
Рисунок 2.2. – Годограф А(ω)φ(ω)
Зная значение
= 14 В, а = 15 В, можно рассчитать ![]() .
.
Исходя их графика для определения постоянных времени
апериодического звена второго порядка, рисунок 2.3, найдём значение ![]() .
.
![]()
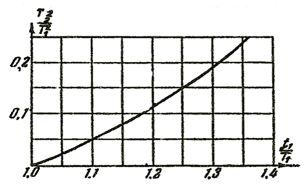
Рисунок 2.3 – График для определения постоянных времени апериодического звена второго порядка
Следует можем
найти ![]() :
:
![]()
![]()
Воспользовавшись программой MatLab, построим графики характеристик: ФЧХ, АЧХ, ВЧХ, МЧХ, КЧХ, ЛАЧХ и ЛФЧХ.
В окна команд запишем:
>> m=[0.93333]
m = 0.9333
>> n=[1.3225 1.15 1]
n = 1.3225 1.1500 1.0000
>> tf (m, n)
Transfer function:
0.9333
1.323 s^2 + 1.15 s + 1
>> [h, w]=freqs (m, n, 600);
>> ampl=abs(h);
>> phi=angle(h);
>> phi=unwrap(phi);
>> plot (w, phi, 'k'); grid on
>> plot (w, ampl, 'k'); grid on
>> vchhar=ampl.*cos(phi);
>> plot (w, vchhar, 'k'); grid on
>> mchhar=ampl.*sin(phi);
>> plot (w, mchhar, 'k'); grid on
>> plot (vchhar, mchhar, 'k'); grid on
График ФЧХ представлен на рисунке 2.4.
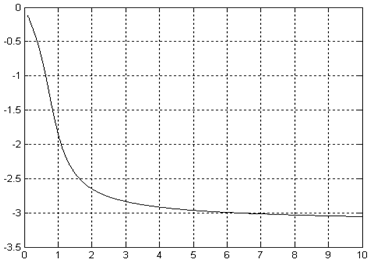
Рисунок 2.4 – График фазочастотной характеристики
График АЧХ представлен на рисунке 2.5.
![]()

![]() Рисунок 2.5 – График амплитудо-частотной характеристики
Рисунок 2.5 – График амплитудо-частотной характеристики
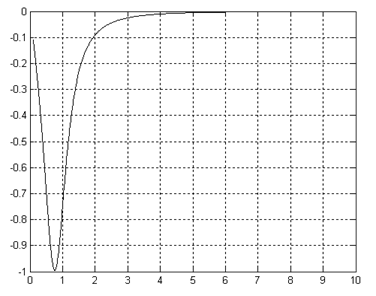
График ВЧХ представлен на рисунке 2.6.
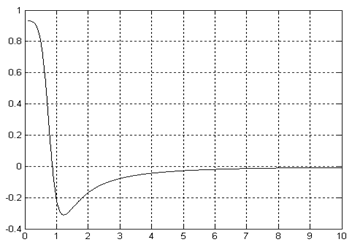
Рисунок 2.6 – График вещественной частотной характеристики
График МЧХ представлен на рисунке 2.7.
![]() Рисунок 2.7 – График мнимой частотной характеристики
Рисунок 2.7 – График мнимой частотной характеристики
График КЧХ представлен на рисунке 2.8.
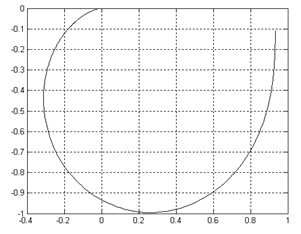
Рисунок 2.8 – График комплексной частотной характеристики
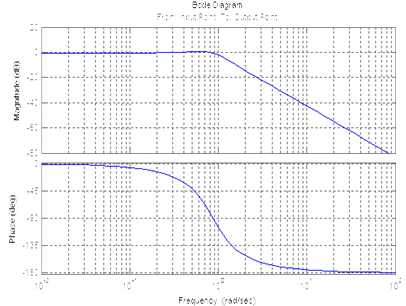
Для построения ЛАЧХ и ЛФЧХ составим структурную схему представленную на рисунке 2.9.

Рисунок 2.9 – Структурная схема для построения ЛАЧХ и ЛФЧХ
![]()
![]()
![]() Рисунок 2.9 – Графики
ЛАЧХ и ЛФЧХ
Рисунок 2.9 – Графики
ЛАЧХ и ЛФЧХ