Дипломная работа: Исследование системы управления скоростью электропривода с упругим звеном в передаточном механизме
Исходные данные:
| Режим управления | Диапазон, отн. ед. | Тип двигателя | Тип и величина нагрузки, отн. ед. |
|
|
| программный | 0,1 … 0,8 | Д816-150-470 | вязкое тр.2-ого рода; к=1 | 2 | 10 |
Выполнения работы:
Основные технические характеристики двигателя Д816-150-470:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
примечание:
двигатель в данном номинальном режиме используется вместе со стабилизирующей обмоткой.
Расчёт необходимых для синтеза и экспериментирования данных:
а) Электромеханическая часть:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Учитывая диапазон регулирования:
![]()
![]()
б) Двухмассовая часть:
![]()
![]()
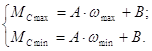
Учитывая, что для вязкого трения
2-ого рода зависимость ![]() от
от ![]() нелинейная, линеаризуем её в рабочем диапазоне скоростей:
нелинейная, линеаризуем её в рабочем диапазоне скоростей:
 ;
;
![]()
![]()
![]()
Синтез модального регулятора:
Система дифференциальных уравнений объекта регулирования:
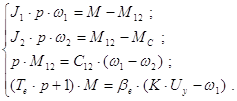
Выберем вектор переменных состояний:
![]() ,
,
отсюда имеем:
![]()
Сделаем подстановку:
![]()
![]()


Решая данную систему дифференциальных:
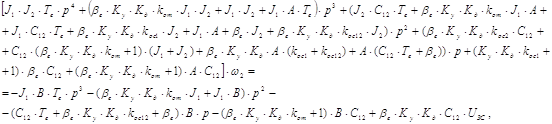
откуда характеристический полином системы:
![]()
![]()
![]()
![]()
![]()
![]()
Нормируем характеристический
полином, выбирая 
![]()
где ![]()
![]()
![]()
![]()
![]()
Для отработки программного задания настроим данную систему на модульный оптимум.
Зададимся:
![]()
![]() .
.
![]()
![]()
![]()
Решая данную систему с помощью комплекса MATCAD 2001., находим коэффициенты обратных связей по переменным состояния:
![]()
![]()
![]()
Определим ![]() :
:

Определим зависимость частоты вращения двигателя от напряжения задания:
![]()
Определим зависимость идеальной скорости холостого хода от задания:
![]()
Для границ диапазона регулирования имеем:
![]()
![]()
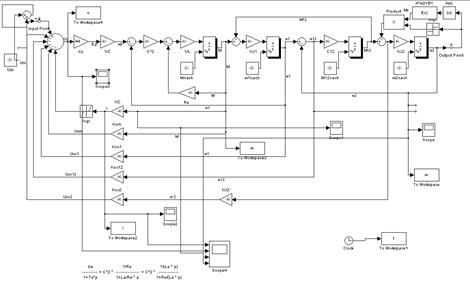
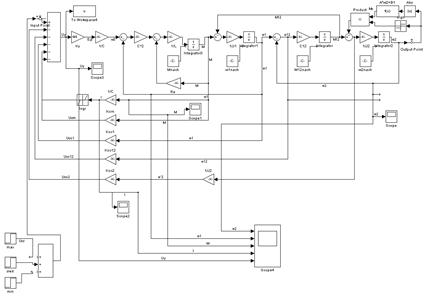
Выполним моделирование электропривода постоянного тока с управляемым преобразователем в цепи якоря и упругой механической частью.
Модель объекта управления с модальным регулятором в среде MATLAB 6.1.:
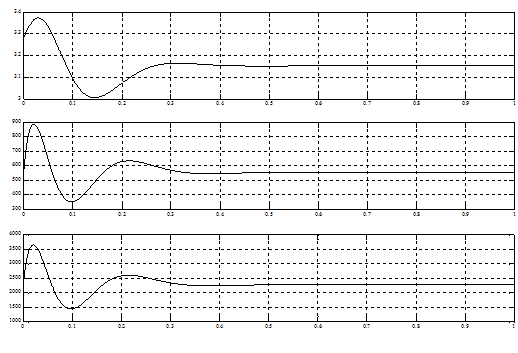
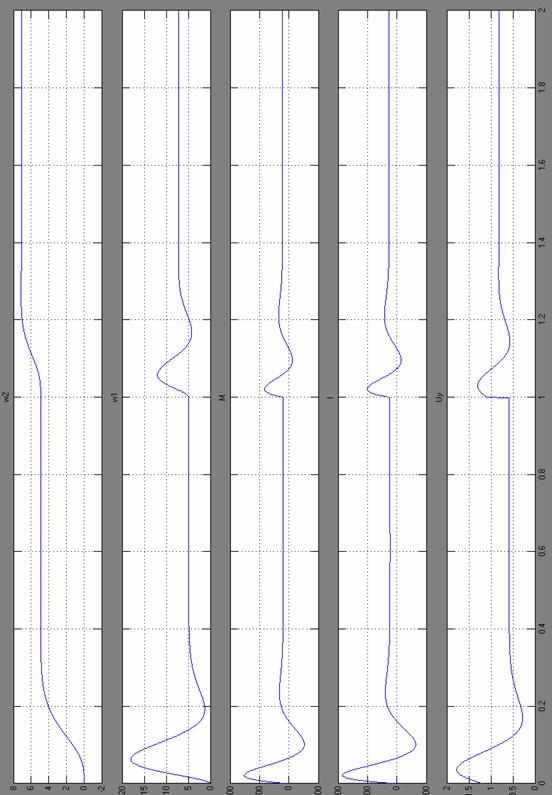
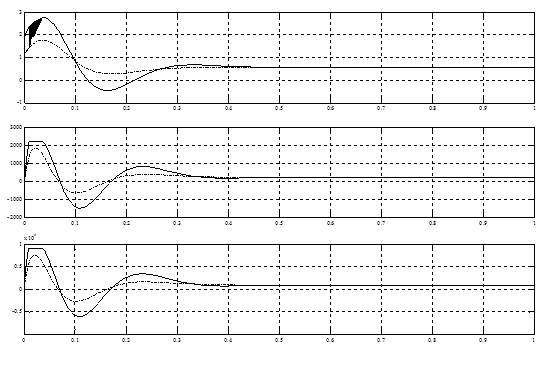
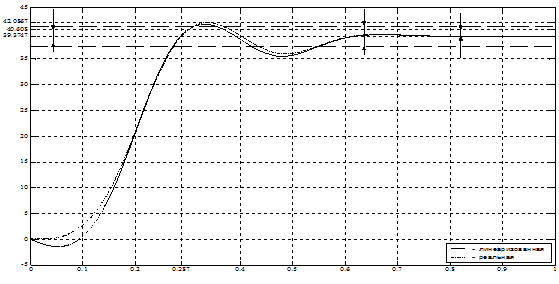
Результаты моделирования:
Пуск до ![]()
 |
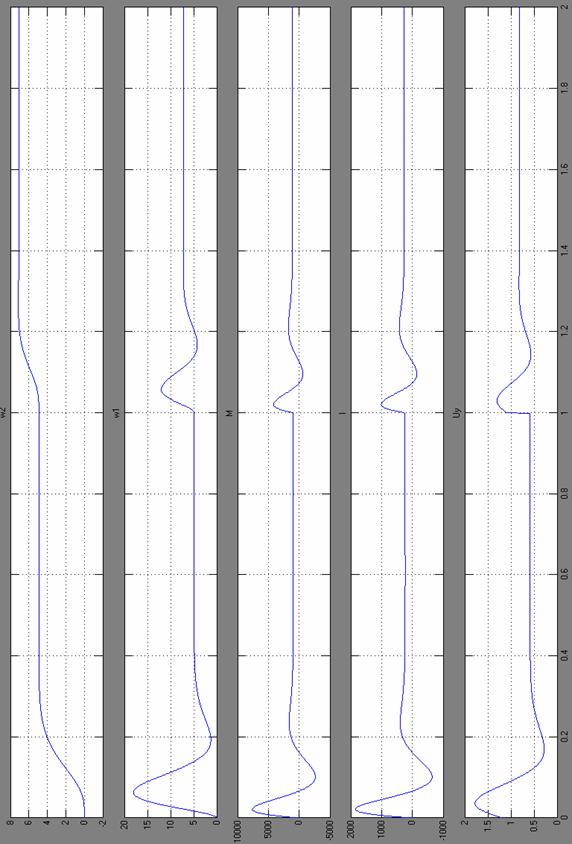
Пуск до
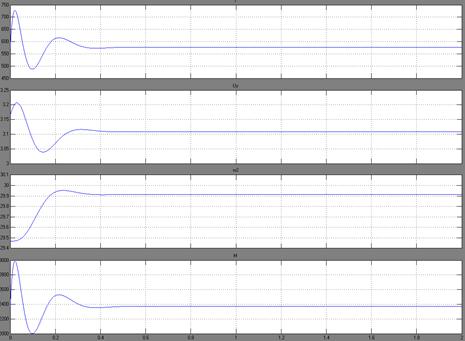
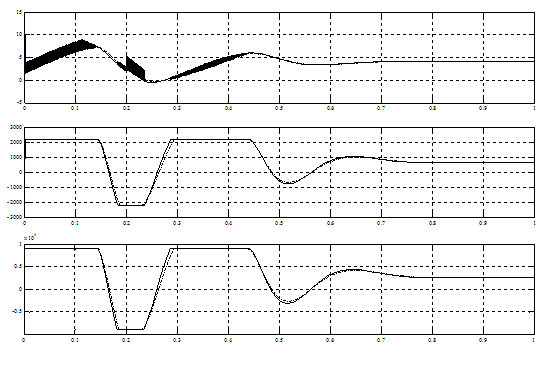
Результаты моделирования:
 |
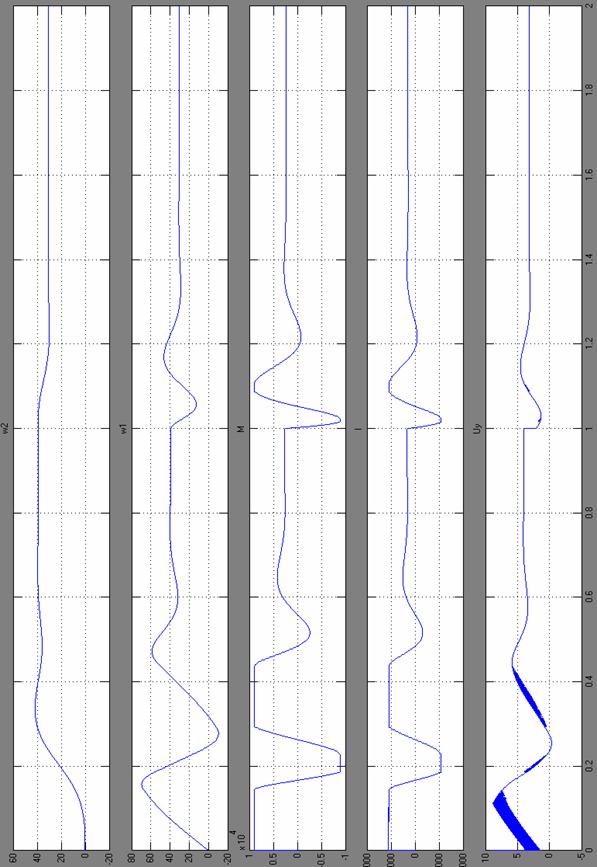
Пуск до
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Пуск до ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
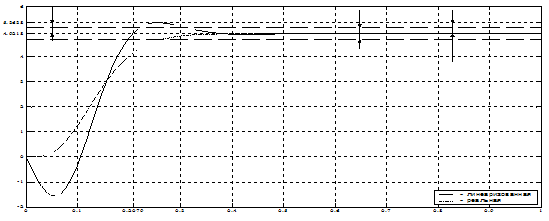
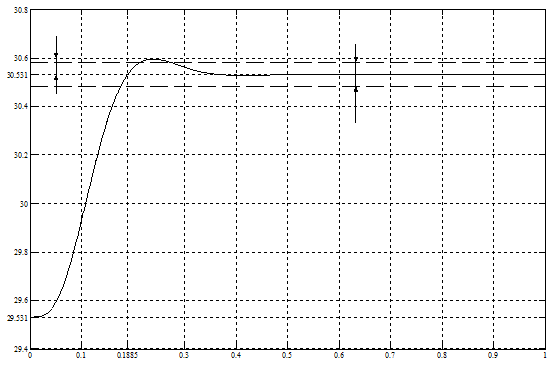
Проверка отработки задания ![]() ,
, ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()