Реферат: Локальные сети
РЕФЕРАТ
по дисциплине: "Информационные сети и телекоммуникации"
на тему: "Локальные сети"
Ростов-на-Дону 2010 г.
Содержание
1. Особенности локальных сетей
2. Стандарты 802. х
2.1 Стандарт 802.3, сети Ethernet
2.2 Стандарт 802.5, сети Token ring
3. Промышленные сети (Fieldbus)
3.1 CAN сети
Список литературы
1. Особенности локальных сетей
Для локальных сетей характерна небольшая удаленность (обычно в пределах сотен метров), небольшое число узлов (в пределах нескольких десятков) и в связи с этим простая топология связей. Благодаря этим особенностям задачи организации взаимодействия существенно упрощаются и в ряде случаев для работы локальных сетей требуется реализация только прикладного, канального и физического уровней модели OSI. Задачи остальных уровней существенно упрощаются и могут быть распределены между прикладным и канальным уровнем. Особенно в промышленных сетях взаимодействие можно описывать такой трехуровневой моделью.
Из-за простой топологии связей и небольшой удаленности в локальных сетях очень редко используют действующие каналы связи. В этом случае оказывается более эффективным создавать специальные каналы связи, хорошо согласующиеся с требованиями организации эффективной передачи данных. Практически всегда в локальных сетях линии связи находятся в общем пользовании всех узлов, поэтому принято считать линии связи разделяемой средой передачи данных. Т.е. обмен данными в локальной сети осуществляется через разделяемую среду передачи данных.
В локальной сети все узлы используют одну и ту же структуру кадров, одни и те же способы кодирования, поэтому одновременная передача нескольких сообщений невозможна. Конечно, кроме значительных преимуществ, такая организация имеет и недостатки. Производительность системы передачи данных ограничивается возможностями используемой разделяемой среды, при большой нагрузке может возникнуть заметная конкуренция, мешающая работе. Надежность ниже из-за отсутствия дополнительных путей передачи данных. Однако простота и возможность использования стандартных хорошо отработанных средств организации передачи данных привели к широкому распространению технологий локальных сетей. Узлы могут получить доступ к разделяемой среде передачи данных только поочередно, используя какой-либо механизм арбитража для управления доступом. Как правило, это не создает особых трудностей в работе локальной сети.
В локальных сетях используются две основные топологии связей: общая шина и кольцо. В качестве физических линий связи используют витую пару, коаксиальный кабель или оптоволокно. Уже в локальных сетях возникает необходимость в разделении понятий физической и логической топологии. Физическая топология определяется структурой физических линий связи, а логическая - путями передачи данных. Физическая и логическая топология не всегда совпадают. Различия в топологиях зависят от применяемых в сети коммуникационных устройств. Эти устройства могут просто ретранслировать сигналы между сегментами сети, перераспределять сообщения между сегментами, определять направления и/или маршруты передачи данных. Особенно сложные функции реализуются коммуникационными устройствами не в локальных сетях, а в сетях со сложной физической топологией.
В связи с использованием разделяемой среды передачи данных на канальном уровне локальных сетей приходится решать 2 задачи: управление доступом к среде (MAC уровень) и логической передачи данных (LLC уровень). Подготовка кадра для передачи данных на канальном уровне начинается с LLC уровня. Затем LLC - кадр передается на MAC уровень и с помощью его процедур производится передача уже MAC - кадра через физический уровень. При приеме данных последовательность обработки обратная. С физического уровня поступает MAC - кадр, затем, освобождаясь от атрибутов MAC - кадра, он преобразуется в LLC - кадр.
Классические функции канального уровня информационной сети реализуются LLC процедурами. Они включают общую организацию передачи и управление передачей данных, контроль и восстановление искаженных или потерянных данных. MAC процедуры обеспечивают доступ узлов к разделяемой среде передачи данных, их адресацию в локальной сети, корректное распределение ресурсов при возникающей конкуренции за доступ к разделяемой среде.
Как и многие другие вопросы функционирования информационных сетей, процедуры MAC и LLC стандартизованы. Следует отметить, что MAC и LLC протоколы взаимонезависимы, т.е. каждый протокол MAC может применяться с любым протоколом LLC и наоборот. И в соответствии с принципами модели OSI протоколы MAC и LLC могут согласовываться с различными протоколами и верхних, и нижнего (физического) уровней. Основные процедуры канального уровня в локальных сетях были стандартизованы в США комитетом 802 IEEE и легли в основу стандартов ISO 8802. Несколько позже на основе тех же основных принципов были разработаны и стандартизованы технологии, так называемых, промышленных сетей (Fieldbus).
2. Стандарты 802. х
Группа стандартов 802.1 - 802.12 определяет технологии локальных компьютерных сетей на канальном и физическом уровнях.802.1 носит общий для технологий локальных сетей характер и относится к управлению сетевыми устройствами (мосты, коммутаторы) и организации межсетевого взаимодействия.802.2 описывает процедуры LLC и во многом повторяет HDLC протоколы.802.3 - это определение MAC и физического уровней популярных компьютерных сетей Ethernet.802.4 - определение MAC и физического уровней сетей промышленной автоматики Token bus.802.5 - определение MAC и физического уровней компьютерных сетей Token ring. Остальные стандарты этой группы посвящены технологиям пока не получившим широкого распространения.
Стандарт 802.1 пока рассматриваться не будет. Основные вопросы этого стандарта, касающиеся работы коммуникационных устройств (концентраторов, мостов, коммутаторов и шлюзов), будет рассмотрены позже вместе с вопросами структуризации сетей.
Стандарт 802.2 является LLC протоколом и определяет три возможных процедуры с разным типом сервиса. LLC1 - передача данных без установления соединения и подтверждения. LLC2 - с установлением соединения и подтверждением. LLC3 - без установления соединения, но с подтверждением. Тип сервиса задается применяемыми алгоритмами передачи данных и типами кадров. LLC - кадр содержит следующие поля: DSAP - адрес точки доступа сервиса назначения (1 байт), SSAP - адрес точки доступа сервиса источника, поле управления - тип кадра и другая служебная информация, поле данных. DSAP и SSAP необходимы для согласования работы протоколов верхнего уровня. Эти поля предусматривают возможность работы LLC протокола под различными вышестоящими протоколами в разных узлах одной сети. Поле управления такое же, как в HDLC протоколах, определяет те же самые процедуры.
MAC процедуры, рассмотренные в стандартах 802. х, предполагают два типа топологии связей: шина и кольцо, и два метода доступа к разделяемой среде: вероятностный и детерминированный. Вероятностный метод предполагает возможность доступа в произвольные моменты времени и обеспечивается относительно простыми алгоритмами управления, но повышает вероятность конкуренции узлов в сети. Детерминированный метод предполагает доступ узлов сети в определенном, заранее известном порядке. Это приводит к задержкам в передаче данных, но гарантирует доступ в течение предсказуемого интервала времени. Такой метод требует более сложных алгоритмов управления, т.к. возникает необходимость в определении очередности и контроле дисциплины обслуживания. Достаточно часто в промышленных сетях применяют управление доступом к разделяемой среде передачи данных, основанное на процедурах взаимодействия ведущий-ведомый. Ведущий master-узел отвечает за дисциплину обслуживания и по заявкам ведомых slave-узлов или поочередно разрешает использование общего канала связи в течение ограниченного времени. В настоящее время большее распространение получил вероятностный метод доступа.
2.1 Стандарт 802.3, сети Ethernet
Ethernet в настоящее время является наиболее распространенным стандартом локальных компьютерных сетей. Его область применения не ограничивается классическими компьютерными сетями. Очень часто при построении многоуровневых систем управления на нижних уровнях применяют системы на основе стандартов промышленных сетей, а для передачи данных между управляющими компьютерами на верхних уровнях - сети Ethernet. Эта распространенность свидетельствует о высокой эффективности при относительно невысоких затратах на создание и эксплуатацию. Стандарт 802.3 определяет параметры физического уровня и процедуры MAC уровня локальной сети.
Физический уровень стандарта предполагает скорость передачи данных 10 Мбит/сек, 100 Мбит/сек. Существуют версии стандарта с более высокими скоростями передачи данных. Конечно, речь идет о физической скорости формирования и передачи сигналов, эффективная скорость передачи данных всегда ниже. В качестве линий связи предусматривается использование витой пары, коаксиального кабеля или волоконно-оптического кабеля. Сигнальное кодирование на скорости 10 - манчестерский код, на скорости 100 - код NRZ.
MAC уровень предполагает логическую топологию общая шина и вероятностный метод доступа CSMA/CD (коллективный доступ с прослушиванием несущей и обнаружением коллизий). Это является основной особенностью сетей Ethernet. Все MAC кадры, передаваемые по общей шине, принимаются всеми узлами сети. Необходимость в обработке кадра определяется каждым узлом самостоятельно по MAC адресу узла назначения. Для идентификации передатчика каждый кадр также содержит MAC адрес узла источника. Естественно, что в пределах одной сети узлы должны иметь уникальные MAC адреса. Все необходимые процедуры MAC уровня реализуются устройством, называемым сетевым адаптером.
Доступ к среде передачи данных осуществляется следующим образом. Все узлы постоянно прослушивают линию связи. Если линия связи занята, т.е. идет передача кадра, до тех пор, пока линия не освободится, больше ни один из узлов не имеет права начинать передачу. Если в текущий момент времени линия связи свободна, каждый узел имеет право начать передачу. Из-за случайного характера передачи кадров узлами сети, всегда есть определенная вероятность того, что несколько узлов одновременно начнут передачу. Такая ситуация, называемая коллизией, является нормальным, хотя и нежелательным явлением. При коллизии корректная передача данных невозможна, поэтому все узлы должны прекратить передачу и затем, позже предпринять новую попытку передачи. Для обнаружения коллизий сетевые адаптеры содержат специальные детекторы коллизий.
Между передачами кадров должна выдерживаться специальная пауза длительностью 9,6 мкс. Это время необходимо каждому сетевому адаптеру для обработки принятого кадра. Если корректный MAC кадр адресован другим узлам, после обработки сетевым адаптером он отбрасывается. Если - адресован этому узлу, кадр передается вышестоящим уровням для дальнейшей обработки.
Как законченное сообщение, MAC кадр имеет строго определенную структуру. Передача всегда начинается с преамбулы длиной 7 байт (10101010), затем следует начальный разделитель SFD (10101011), далее - адрес назначения DA (6 байт), адрес источника SA (6 байт), длина поля данных (2 байта), данные (0 - 1500 байт, если поле данных менее 46 байт, оно дополняется до 46 байт для корректного обнаружения коллизий), контрольная сумма CRC - 32. Сетевой адаптер при приеме кадра должен распознавать следующие ошибки: длинный кадр (более 1518 байт), короткий кадр (менее 64 байт), "болтливый" кадр (длинный с неправильной CRC), ошибка выравнивания (не кратно байту), ошибка CRC.
Адрес назначения DA может быть трех типов: уникальный MAC - адрес узла приемника (первый байт 00h или 02h), широковещательный адрес (все элементы FF-FF…), групповой адрес (первый байт 01). Уникальный MAC - адрес определяется производителем сетевого адаптера и назначается комитетом IEEE (2 байта - код производителя, 3 байта - серийный номер). Адрес источника SA всегда уникальный. LLC - кадр целиком помещается в поле данных MAC - кадра. CRC контролирует все поля кадра, начиная с DA.
Максимальная эффективная скорость передачи данных зависит от длины кадра. Для физической скорости 10 Мбит/сек при коротких кадрах она составляет 5,48 Мбит/сек, а при длинных кадрах - 9,76. Очевидно, что это только теоретически достижимая скорость, т.к. такие значения возможны при отсутствии коллизий. При высокой нагрузке на разделяемую среду передачи данных вероятность коллизий существенно повышается, а реальная скорость передачи данных соответствующим образом снижается. Считается, что сети Ethernet эффективно работают при нагрузке до 30%. При большем трафике постоянные коллизии могут практически заблокировать передачу данных.
Коллизии и алгоритмы выхода из коллизий.
Коллизия - одновременная передача сигналов несколькими узлами, обнаруживается специальными детекторами коллизий, содержащимися в сетевых адаптерах каждого узла. Опознавание коллизий производится с помощью контроля уровня сигналов в линии связи. При волновом сопротивлении 50 Ом и выходном токе передатчика 40 мА, уровень нормального сигнала не превышает 1 В. При коллизии, когда сигналы формируются одновременно двумя передатчиками, уровень сигнала достигает 2 В. Детектор коллизий реагирует на сигналы, уровень которых превышает 1,5 В. Отсюда вытекает первое ограничение на длину линии связи (10Base-5 - 500 м, 10Base-2 - 185 м, 10Base-Т - 100 м). В приемниках должны надежно идентифицироваться и обычные сигналы манчестерского кода, и сигналы коллизий. Длина линий связи может быть увеличена только с помощью дополнительных коммуникационных устройств - повторителей и концентраторов (хабов). Следует иметь в виду, что существуют жесткие ограничения и на предельную длину, и на количество коммуникационных устройств, так называемое "правило 5-4-3".
Это правило задает следующие требования к физической топологии:
общее количество кабельных сегментов может быть различным, но допустимы только "древовоидные" структуры связей, между любой парой узлов должен существовать только один путь;
между любой парой узлов максимальное количество кабельных сегментов - 5, максимальное количество хабов - 4, активных сегментов, содержащих хотя бы 1 узел - 3.
Кроме ограничений на длину линий связи из-за ослабления сигналов действуют ограничения, связанные с задержкой сигналов из-за конечной скорости распространения. Эти ограничения являются более существенными. Для надежного распознавания коллизий всеми узлами сети необходимо, чтобы время передачи кадра превышало время двойного оборота PDV. Только в этом случае коллизии будут надежно определяться даже для самых удаленных друг от друга узлов сети. PDV зависит от типа линии связи и от ее длины, а минимальная длина кадра ограничена в стандарте.
При обнаружении коллизии узел должен прервать передачу в любом месте кадра и вместо сигналов манчестерского кода передать jam-последовательность. Все сетевые адаптеры принятые данные просто отбрасывают без обработки. Повторная передача кадра разрешена через время кратное интервалу отсрочки TS=51,2 мкс. Причем интервал времени выбирается случайным образом по следующему правилу:
T = TSx (0-2 n),
где n (номер попытки не более 10)
Таким образом, время задержки для повторной передачи лежит в пределах от 0 до 52,4 мсек. Если после 16 попыток передача не состоялась, на верхний уровень выдается сообщение о невозможности передачи данных.
При увеличении скорости передачи данных, например замена спецификации 10 Base на 100Base, ужесточаются топологические ограничения. В первую очередь это связано с требованиями надежного обнаружения коллизий. Для структуризации сети требуется применение специальных коммуникационных устройств.
Домен коллизий - это сеть, в которой узлы распознают коллизию независимо от того, в какой части сети она произошла. При слишком больших доменах коллизий сеть может стать неэффективной. В этом случае сеть разделяют на несколько доменов коллизий (логических сегментов) применением мостов или коммутаторов. Такая структуризация сети позволяет не только снизить нагрузку на каждый домен, но и смягчить ограничения по предельному числу узлов и максимальной длине линий связи.
2.2 Стандарт 802.5, сети Token ring
В этих сетях применяют детерминированный метод доступа с логической топологией кольцо. Право на передачу данных узлы в сети получают поочередно, передавая по кольцу специальный служебный кадр - token. Каждый узел, получив token (маркер), может заменить его собственным кадром данных или передать маркер дальше по кольцу. Сигналы в кольце передаются всегда в одном направлении, т.е. поступают от соседнего узла, находящегося выше по кольцу, и передаются другому соседнему узлу, находящемуся ниже по кольцу. Теоретически кольцо может содержать минимум два узла. Переданный кадр должен совершить полный оборот по кольцу и вернуться к отправителю. Только узел-источник может изъять кадр из кольца, все остальные узлы могут только передавать его дальше по кольцу. После оборота по кольцу передаваемый кадр заменяется маркером, который поступает в следующий узел, и т.д.
Спецификации физического уровня определяют скорости передачи данных 4 и 16 Мбит/сек, физическая топология - звезда. Узлы подключатся через специальное коммуникационное устройство - MSAU. MSAU формирует логическое кольцо, обеспечивая передачу сигналов на вход узла (сверху по кольцу) и прием на выходе узла (вниз по кольцу). При неработающем узле обеспечивается передача сигналов в обход узла для сохранения корректности работы. Предусмотрена специальная процедура включения узла в кольцо, и включение узла и выключение приводит к кратковременной потере работоспособности.
В целом, организация работы сети существенно сложнее, чем в сети Ethernet. В сетях с топологией общая шина и вероятностным доступом все узлы обладают равноправным доступом и выполняют одинаковые процедуры. В Token ring процедуры управления работой существенно сложнее, поэтому функции узлов различны. Основные задачи управления выполняет один узел - активный монитор, все остальные узлы - резервные мониторы. При отключении активного монитора автоматически выполняется процедура назначения нового активного монитора, его функции по заранее определенному алгоритму возлагаются на один из резервных мониторов.
Активный монитор следит за корректностью работы кольца: формирует и отправляет маркер, контролирует движение кадров в кольце, обеспечивает синхронизацию и т.д.
3. Промышленные сети ( Fieldbus)
Термин Fieldbus - промышленные сети - это технологии передачи данных, ориентированные на применение в задачах управления техническими объектами. Объектом управления может служить и относительно простой бытовой агрегат, и промышленное технологическое оборудование, и целое производство. Требования, предъявляемые к системам передачи данных, могут быть различными и зачастую весьма противоречивыми. Основой построения промышленных сетей являются процедуры и алгоритмы, которые показали высокую эффективность и гибкость в классических компьютерных сетях. Следует иметь в виду, что технологии телекоммуникационных сетей достаточно просто и полно согласуются с современными требованиями и тенденциями в системах управления. Это постоянно возрастающая "интеллектуализация" всех устройств, необходимость в функциональной гибкости, простота модернизации, работа в реальном масштабе времени, высокая надежность, управляемость и самовосстанавливаемость при нештатных ситуациях, низкие затраты на создание и эксплуатацию.
Естественно, что одного решения на все случаи найти невозможно. В настоящее время применяются и продолжают развиваться несколько сетевых технологий. Это Foundaition Fieldbus, Profibus, CAN сети и другие. Первые два протокола содержат по две различные технологии передачи данных: на нижнем уровне сети - система передачи данных низкоскоростная (31,5 кбит/с) для локальных систем управления, на верхнем уровне - Ethernet (100 Мбит/с) для объединения локальных систем в единые АСУ. Протоколы содержат средства организации взаимодействия между этими двумя сетевыми уровнями. В CAN сети протоколы определяют только нижний уровень сети, но с большими функциональными возможностями. В то же время нет никаких препятствий для организации взаимодействия с более производительными телекоммуникационными технологиями с помощью средств выходящих за рамки CAN протокола.
В большинстве промышленных сетей используют топологию связей - общая шина. Такая топология является наиболее эффективной в силу простоты реализации, функциональной гибкости, легкости модернизации действующих систем, низкой стоимости. В большинстве протоколов в качестве линий связи используют витые пары. Важными требованиями, которым должны удовлетворять промышленные сети, являются высокая надежность и необходимость работать в условиях высокого уровня помех, создаваемых работающим технологическим оборудованием.
3.1 CAN сети
CAN протокол, созданный фирмой Bosch для автомобильной электроники в 80-х годах, хорошо согласуется с основными требованиями нижнего уровня промышленных сетей. Он обладает высокой гибкостью, неразрушающим арбитражем доступа к шине, встроенными эффективными средствами контроля и диагностики с возможностью отключения дефектных узлов. В настоящее время CAN сети - одна из наиболее перспективных технологий промышленных сетей. CAN протокол давно вышел за рамки фирменной разработки и утвержден в качестве международного стандарта. Существует ряд международных организаций и объединений, которые обеспечивают необходимый уровень стандартизации. Например, организация CiA объединяет более 300 фирм, которые либо разрабатывают и производят средства для построения CAN сетей, либо заняты их внедрением в различных сферах; CAN протоколы поддерживаются международной ассоциацией автомобильных инженеров SAE.
CAN протокол, так же как и другие протоколы локальных сетей, определяет 2 уровня модели OSI - физический и канальный. Технология передачи данных основана на тех же принципах: использование общих ресурсов, стандартизация алгоритмов и процедур, интеллектуализация средств реализации этих алгоритмов и процедур. Для прикладных задач протокол не нуждается в реализации остальных уровней модели OSI и поэтому очень часто описывается упрощенной трехуровневой моделью. Третий прикладной уровень выходит за рамки CAN протокола и обычно называется HLP протоколом. В настоящее время применяют различные HLP протоколы, хотя в ряде случаев их применение необязательно. В то же время HLP протоколы могут существенно облегчить согласование требований прикладных задач с возможностями CAN сети.
CAN протокол в рамках стандартов ISO11898, ISO11519 и J1939 (SAE) утвержден на базе протокола CAN 2.0 A/B (Bosch) и определяет физический и канальный (MAC) уровни телекоммуникационной сети. В отличие от классических компьютерных сетей, CAN сети ориентированы на передачу сообщений небольших размеров - до 8 байт. Благодаря ряду особенностей поддерживают работу в реальном масштабе времени, мультимастерность, прием и обработку сообщений любым количеством узлов сети, неразрушающий механизм арбитража, самоконтроль и самодиагностику узлов, любой узел обладает возможностью запрашивать необходимые данные. Все эти особенности, а также размеры и формат сообщений, сформированные по требованиям систем управления техническими объектами, определяют высокую эффективность и популярность CAN сетей.
Конечно, многие вопросы построения сети выходят за рамки CAN протокола. Решению этих вопросов посвящены HLP протоколы. Это, например, возможность передачи сообщений больших размеров и основные алгоритмы контроля и восстановления утерянных сообщений (LLC процедуры), инициализация сети с автоматическим определением параметров передачи данных, способы определения идентификаторов в сети и их распределение между узлами, структура сообщений и многое другое.
Основными особенностями CAN сети являются механизм неразрушающего арбитража доступа к разделяемой среде передачи данных и отсутствие явно определенной адресации узлов и сообщений. В большинстве случаев реализуется адресация сообщений. Побитовый неразрушающий арбитраж доступа к разделяемой среде передачи данных (общей шине) реализуется использованием рецессивного и доминантного уровней сигналов. С помощью доминантного сигнала уровень приоритета устанавливается для сообщений, а не для узлов, хотя и используется близкий к Ethernet метод вероятностного доступа с прослушиванием несущей.
Для построения CAN сети применяются стандартные аппаратные средства: CAN - контроллеры и трансиверы (приемопередатчики). Многие ведущие производители выпускают такие устройства в виде интегральных схем. Трансиверы обеспечивают прием и передачу сигналов по линиям связи (физический уровень), а CAN - контроллеры управляют доступом к разделяемой среде передачи данных, а также производят подготовку и обработку передаваемых кадров (канальный и частично физический уровень)
3.1.1 Физический уровень CAN сети
Передача сигналов производится по двухпроводной линии, классический вариант - витая пара. Могут применяться и другие физические линии связи, например, предусматривается возможность передачи по линии связи и сигналов, и питающего напряжения. Скорость передачи данных стандартизована и может лежать в диапазоне от 10 кбит/с до 1 Мбит/с. Из-за особенностей алгоритма арбитража применяется сигнальный код NRZ, а максимальная длина линии связи и скорость передачи данных жестко связаны. Время двойного оборота, которое определяется задержкой сигналов, должно быть меньше длительности одного битового интервала. На количество узлов ограничений нет.
Побитовый неразрушающий арбитраж использует доминантный и рецессивный уровни сигналов в линии связи. Если трансиверы двух узлов формируют разные уровни сигналов, то в линии связи будет передаваться доминантный уровень. Протокол предполагает контроль уровня сигнала в линии связи параллельно с передачей, если сигнал в линии отличается от передаваемого, узел обязан прервать передачу. Таким образом, передача сообщения с доминантными сигналами всегда будет продолжаться, а передача сообщения с рецессивными сигналами может быть прервана при одновременной работе нескольких трансиверов.
CAN протокол амплитуду сигналов жестко не определяет, границы сигналов заданы на уровне 1/3 от напряжения питания. При стандартном напряжении 5 В эти границы составляют 1,5 В и 3,5 В. Доминантный сигнал (0) соответствует напряжению больше 3,5 В на шине CAN H и напряжению меньше 1,5 В на шине CAN L. Рецессивный уровень (1) - одинаковые напряжения на обеих шинах. Входы трансиверов идентифицируют сигналы по разности напряжений, поэтому синфазные помехи не приводят к искажению сигналов. Для повышения надежности в трансиверах рекомендуется применять стандартные средства гальванической развязки.
Синхронизация требует выделения синхросигналов из принимаемых сигналов.Т. к. код NRZ предполагает переключение сигналов только на границах битовых интервалов, протокол запрещает передачи длинных последовательностей одинаковых сигналов. Используемый алгоритм бит-стаффинга реализует добавление противоположного бита после любой последовательности, содержащей пять одинаковых бит. Это позволяет обеспечить надежную синхронизацию при передаче произвольных битовых последовательностей. Кроме того, последовательности, содержащие более пяти одинаковых бит подряд, используются как сообщения об ошибках.
Тактовые генераторы всех узлов автономны и должны работать на номинально одинаковых частотах. Для обеспечения надежной синхронизации битовый интервал (время передачи одного бита, определяемое скоростью передачи) разбивается на временные кванты (период тактовых импульсов). В битовом интервале по стандарту может содержаться от 8 до 25 временных квантов. Для синхронизации всегда используется первый временной квант каждого битового интервала, а идентификация сигнала производится в последней четверти битового интервала (sample point). Максимальное расхождение во временных границах не превышает одного временного кванта для узлов с несколько отличающимися реально тактовыми частотами (частоты совпадают только номинально). И это расхождение не выводит точку идентификации (sample point) за допустимые пределы. Синхроимпульсы формируются по каждому переключению из доминантного в рецессивный уровень. Т.к. бит-стаффинг запрещает в кадре передачу более 5 одинаковых бит подряд, синхроимпульсы будут формироваться не реже одного раза за десять битовых интервалов. Разница в тактовых частотах узлов сети не должна приводить к ошибкам синхронизации за этот период, что несложно обеспечить современными аппаратными средствами.
Рекомендуемые значения скоростей передачи (с указанием максимальной длины линий связи), временных квантов (величина обратная тактовой частоте) и количества временных квантов в битовом интервале приведены в таблице. Стандартное номинальное значение тактовой частоты, необходимое для синхронизации на максимальной скорости, равно 8 МГц.
Для решения основных задач физического уровня выпускаются интегральные схемы трансиверов для различных стандартных напряжений питания и типов линий связи в соответствии с требованиями CAN протокола.
3.1.2 Канальный уровень CAN сети
Реализация процедур CAN протокола производится специальными аппаратными средствами - CAN контроллерами. Эти контроллеры выпускаются либо в виде отдельных интегральных схем, либо являются встроенными элементами более сложных устройств. CAN контроллер в комплекте с ИС CAN трансивера обеспечивает работу локальной сети, реализуя все необходимые функции: от управления доступом к разделяемой среде передачи данных (MAC - процедуры) до передачи сигналов по линии связи. Для HLP протоколов остаются только функции настройки сети: автоматический выбор и задание скорости передачи, поддержка алгоритмов контроля сообщений, передача сообщений большого объема, автоматическое распределение идентификаторов в сети и т.п. Эти задачи могут быть решены без HLP протоколов, при проектировании сети можно вручную задать все необходимые параметры и режимы и произвести настройку CAN контроллеров. HLP протоколы позволяют автоматизировать эти процедуры и в ряде случаев изменять их в процессе работы.
CAN сеть мультимастерная, т.е. все узлы имеют равные права доступа. Если шина свободна, каждый из узлов в произвольный момент времени может начинать передачу сообщения (кадра). Все передаваемые сообщения принимаются всеми узлами, CAN контроллер каждого узла содержит фильтр сообщений. Этот фильтр может быть настроен на обработку сообщений с определенными идентификаторами, все остальные сообщения будут игнорироваться. Т.е. сообщения в сети могут приниматься и обрабатываться любым числом узлов в зависимости от настройки их входных фильтров. Это позволяет, например, обрабатывать сообщения одного датчика всеми узлами, которым эти данные необходимы.
При попытке одновременной передачи кадров несколькими узлами работает механизм поразрядного неразрушающего арбитража, обеспечивающего первоочередной доступ сообщениям с высоким уровнем приоритета (Carrier Sense Multiple Access with Collision Detection and Arbitration on Message Priority - CSMA/CD+AMP). Передача приоритетного сообщения будет продолжена, а остальные узлы должны прервать передачу до освобождения шины. Уровень приоритета определяется положением и количеством доминантных бит в поле арбитража, в котором передается идентификатор сообщения. Меньшему значению идентификатора соответствует более высокий уровень приоритета.
Каждый передающий узел, формируя сигналы на шине, контролирует ее состояние и продолжает передачу до тех пор, пока состояние шины и передаваемые сигналы совпадают. Прекращение передачи происходит только при передаче рецессивного бита, если одновременно какой-либо другой узел передает доминантный бит. При этом узел, формирующий доминантный бит, передачу сообщения продолжит.
Содержание передаваемых данных обозначается 11-битным идентификатором (29-битный идентификатор в расширенном формате), стоящим в самом начале сообщения. Особенностью является то, что этот идентификатор определяет приоритет сообщения. Кроме того, идентификаторы присваиваются не узлам, а сообщениям и определяются содержащимися в сообщениях данными. Такой тип рассылки сообщений называется "схема адресации, ориентированная на содержимое". При этом один узел может отправлять сообщения с различными идентификаторами в зависимости от характера передаваемых данных, а также принимать и обрабатывать сообщения с различными идентификаторами в зависимости от настройки входных фильтров.
В результате применения схемы адресации, ориентированной на содержимое, обеспечивается высокая степень конфигурируемости и гибкости системы. Добавление в сеть новых узлов может осуществляться без модификации аппаратной или программной части сети.
CAN протокол предусматривает два алгоритма передачи данных:
передающий узел самостоятельно передает кадр данных, остальные узлы его принимают и обрабатывают;
узел может послать запрос на необходимые данные, по этому запросу узел-источник данных передает сообщение, которое, как и в первом случае, принимается и обрабатывается.
Данные передаются в кадре данных (data frame), а для запроса данных предусмотрен кадр запроса (remote frame), имеющий сходную структуру. Кадр для передачи по шине состоит из семи основных полей. CAN протокол поддерживает два формата кадров (стандартный и расширенный), которые различаются только длиной идентификатора (ID).
Кадр стандартного формата начинается стартовым битом "начало кадра" (SOF - Start of Frame). За ним следует поле арбитража, содержащее 11-битный идентификатор и бит RTR запроса удаленной передачи (Remote Transmission Request). Этот бит указывает, передается ли кадр данных (0) или кадр запроса (1), в котором отсутствует поле данных.
Управляющее поле содержит бит расширения идентификатора (IDE - identifier extension), который указывает тип формата кадра - стандартный (0) или расширенный (1). (В расширенном формате после бита IDE следуют 18 дополнительных бит идентификатора). Кроме того, в этом поле находятся зарезервированный для будущего применения бит R0 и четыре бита DLC для указания длины поля данных. За управляющим полем идут поле данных (0-8 байт) и поле (15 бит + рецессивный бит ограничителя этого поля) циклического контроля CRC, используемое для контроля кадра (x15 + x14 + x10 + x8 + x7 + x4 + x3 + 1).
Поле подтверждения (АСК) состоит из области АСК длиной в 1 бит и ограничителя поля АСК. АСК-бит помещается на шину передатчиком как рецессивный (логическая 1). Приемники, корректно принявшие эти данные, преобразуют его в логический 0, делая его доминантным. Таким образом, передающий узел получает подтверждение, что хотя бы один приемник правильно принял его сообщение. Сообщения подтверждаются приемниками независимо от результата тестирования данных при приёме.
Конец сообщения указывается EOF (7 рецессивных бит), после которого идет пауза. Длина паузы равна минимальному количеству битов (3 бита), отделяющих последовательные сообщения.
В отличие от других шинных систем, в CAN протоколе не используются подтверждающие сообщения. Вместо этого он сигнализирует о возникших ошибках передачи. Всего в CAN-протоколе реализовано пять механизмов проверки на наличие ошибок. Флаг ошибки - это сообщение, содержащее 6 доминантных бит подряд. Другие узлы, приняв такую последовательность, также могут передать флаг ошибки. Поэтому максимальная длина этого поля может достигать 12 доминантных бит. Завершается кадр ошибки ограничителем флага ошибки из 8 рецессивных бит, после стандартной паузы (3 бита), прерванная кадром ошибки передача должна быть повторена.
Первые три алгоритма контроля реализованы на уровне сообщений:
Циклический контроль. Контролируемые поля кадра от SOF до CRC. При использовании этого метода в конце передачи добавляются биты циклического избыточного кода. При приеме сообщения происходит его повторное вычисление и сравнение с полученным кодом циклического контроля. Если эти два значения не совпадают, то выявляется ошибка CRC.
Контроль кадра. Проверяется соответствие структуры передаваемого кадра его фиксированному формату и размеру. Ошибки, которые могут возникнуть при проверке кадра, получили название "ошибки формата".
Ошибки подтверждения. Как уже ранее было сказано, принятые кадры подтверждаются всеми приемниками. Если передатчик не получил никакого подтверждения, то это может означать, что приемники обнаружили ошибку (искажено поле АСК), либо приемники вообще отсутствуют в сети.
Следующие два алгоритма определения ошибок реализованы в протоколе CAN на битовом уровне:
Мониторинг шины. Одна из особенностей CAN сети состоит в том, что передающий узел может контролировать свой собственный сигнал на шине во время передачи. Таким образом, каждый узел может наблюдать за уровнем сигнала на шине и определять различие переданного и принятого бита. Расхождение сигналов в поле арбитража требует прекращения передачи, а расхождение в других полях кадра генерирует ошибку.
Заполнение битами. В CAN используется сигнальный код NRZ. Однако, если подряд идет слишком много битов с одним и тем же значением, то возможен сбой синхронизации. Если в сообщении подряд идут пять битов с одинаковым значением, то передатчик автоматически вставляет дополнительный бит. Этот бит автоматически удаляется из сообщения приемниками. Если будет получено шесть последовательных битов с одним и тем же значением, то по CAN протоколу это считается ошибкой.
Если в течение передачи кадра хотя бы одна станция обнаружит ошибку по любому из алгоритмов контроля (локальная ошибка), то она передает кадр ошибки, который аварийно завершает текущую передачу. В этом случае все узлы сети не обрабатывают принятое сообщение, чем достигается непротиворечивость данных во всей сети. Узлы сети, не обнаружившие ошибку, после приема кадра ошибки должны повторить передачу кадра ошибки (глобализация ошибки), поэтому максимальная длина этого поля может достигать 12 доминантных бит. Завершается кадр ошибки ограничителем флага ошибки из 8 рецессивных бит, после стандартной паузы (3 бита), прерванная кадром ошибки передача должна быть повторена. Как правило, повторная передача начинается в течение периода времени, соответствующего передаче 23 битов, отсчитываемого с момента обнаружения ошибки.
Для реализации процедур самоконтроля каждый узел CAN сети содержит два счетчика: счетчик ошибок приема (REC) и счетчик ошибок передачи (TEC). Счетчики автоматически инкрементируются после обнаружения каждой ошибки и декрементируются после корректной передачи или приема кадра. В зависимости от состояния счетчиков ошибок узел может находиться в одном из трех состояний: активной ошибки, пассивной ошибки, отключен от шины.
Состояние активной ошибки является основным для узла CAN сети и предполагает его нормальное функционирование. При обнаружении ошибки в этом состоянии узел посылает кадр активной ошибки (6 доминантных бит). Состояние активной ошибки будет продолжаться до тех пор, пока число ошибок в любом из счетчиков не превышает 127. Если число ошибок превышает 96, микроконтроллеру узла передается сообщение о критическом числе ошибок. При числе ошибок более 127, но менее 256 узел переходит в состояние пассивной ошибки.
Состояние пассивной ошибки свидетельствует о часто повторяющихся ошибках. Узел из этого состояния может самостоятельно вернуться к активной ошибке, если число ошибок в счетчиках станет менее 128. При обнаружении очередной ошибки узел имеет право передать только кадр пассивной ошибки (6 рецессивных бит), который не может изменить текущую передачу любого другого узла. При повторении прерванной передачи этого узла должна быть сделана дополнительная пауза (8 рецессивных бит) для того, чтобы не мешать передаче кадров других узлов.
Если число ошибок в любом из счетчиков превысит 255, узел должен отключиться от шины (на практике REC содержит только 8 дв. разрядов и поэтому число ошибок приема не может превысить этот порог). Самостоятельно CAN контроллер узла не может вернуться в рабочее состояние. Если произведен внешний сброс, CAN контроллер возвращается в состояние активной ошибки и после паузы 128х11 (1408) может передавать сообщения.
CAN протокол определяет правила накопления числа ошибок в счетчиках REC и TEC. В зависимости от вида ошибки увеличение числа ошибок в счетчиках может быть от 1 до 8 при обнаружении однократной ошибки. Декремент содержимого счетчиков в состоянии активной ошибки производится всегда только на 1. Это позволяет присваивать разные веса различным ошибкам. Например, обнаружение ошибки при приеме увеличивает REC на единицу одновременно с отправкой кадра активной ошибки; если принимается доминантный бит после отправки узлом кадра активной ошибки, REC увеличивается на 8, т.к это означает, что только данный узел обнаружил ошибку. Успешный прием кадра узлом уменьшает REC (если он был не нулевым) на 1 в состоянии активной ошибки; если узел был в состоянии пассивной ошибки, в REC устанавливается величина от 119 до 127 (т.е. при TEC менее 128 узел перейдет в состояние активной ошибки).
Любой узел может также послать кадр перегрузки (overload frame), если, во-первых, он не успевает обрабатывать поступающие сообщения и не может обеспечить прием следующего сообщения, во-вторых, при приеме доминантных бит в паузе между кадрами (это может означать потерю синхронизации при приеме). Кадр перегрузки имеет такой же формат, как и кадр ошибки, но передается всегда только после завершения приема кадра. А кадр ошибки может быть передан только в процессе передачи кадра. Кадр перегрузки не увеличивает состояние счетчиков ошибок и не приводит к повторной передаче кадров. Допускается передача узлом не более 2 кадров перегрузки подряд.
В соответствии со всеми процедурами контроля:
передача кадра считается успешной, если не обнаружено ошибок до конца поля EOF;
прием кадра считается успешным, если не обнаружено ошибок и в течение межкадрового интервала (3 бита после EOF).
Необходимо помнить, что CAN протокол не содержит эффективных средств контроля и восстановления искаженных данных кроме процедуры контроля CRC. Процедуры LLC не предусмотрены, несмотря на высокую помехоустойчивость возможны выпадения и вставки. Если необходимы дополнительные средства контроля данных, они должны реализовываться HLP протоколами.
В настоящее время выпускают CAN контроллеры, которые поддерживают одну из трех версий протокола. Версия CAN 2.0A поддерживает работу только с кадрами стандартного формата, имеющими 11-битный идентификатор. CAN 2.0B passive обеспечивает передачу кадров стандартного формата, а прием и обработку кадров и стандартного формата, и расширенного формата с 29-битным идентификатором. CAN 2.0B active обеспечивает обработку кадров обоих форматов.
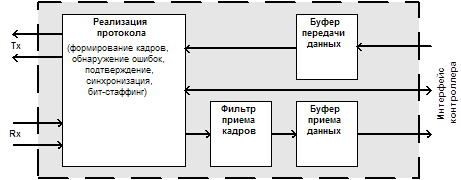
Рис.1. Архитектура CAN контроллера
Очевидно, что CAN контроллер должен содержать буферные ЗУ и для передаваемых данных, и для принимаемых данных. Реализация процедур CAN протокола, как правило, производится аппаратно с передачей через трансивер выходных сигналов узла (Tx) и входных сигналов с шины (Rx). Приемный фильтр аппаратно производит селективную запись принимаемых кадров по их идентификаторам в буферное ЗУ. Предполагается, что буфер передачи должен обеспечивать хранение, по крайней мере, одного сообщения, а буфер приема - не менее двух сообщений. Чаще всего CAN контроллеры имеют больший объем буферных ЗУ. Доступ к данным в буферных ЗУ может производиться по алгоритму FIFO либо в более сложных реализациях с учетом уровня приоритета, определяемого идентификатором. Интерфейс CAN контроллера с управляющим микроконтроллером узла - стандартный. Через этот интерфейс производится настройка параметров, режимов, приемного фильтра и т.п., а также обмен данными с CAN шиной. В настоящее время производится достаточно большое число управляющих микроконтроллеров, которые содержат встроенные средства для обмена данными по CAN сети.
В связи с тем, что CAN протокол определяет только процедуры физического и MAC уровней, а построение сети требует решения и других задач, связанных, например, с процедурами LLC, процедурами автоматического выбора параметров и режимов при инициализации работы узлов, разработаны так называемые CAN HLP протоколы.
К настоящему времени известно уже более четырех десятков CAN HLP. Среди CAN HLP наибольшее распространение в системах промышленной автоматизации получили четыре, поддерживаемых ассоциацией CiA: CAL/CANopen, CAN Kingdom, DeviceNet и SDS.
3.2 Сети PROFIBUS
Комплекс коммуникационных средств для решения задач автоматизации SIMATIC NET (Siemens) содержит три самостоятельных технологии передачи данных для разных уровней управления: AS-интерфейс, сеть Profibus, сеть Industrial Ethernet. Области применения каждой технологии показаны на рис.2. Industrial Ethernet - технология классических компьютерных сетей и на верхнем уровне управления решает задачи информационного взаимодействия подсистем управления. AS-интерфейс с упрощенными алгоритмами организации передачи данных предназначен для обеспечения связи между двухпозиционными элементами локальных систем управления: датчиками, исполнительными устройствами, контроллерами нижнего уровня и т.п. Profibus содержат средства для реализации и технического взаимодействия локальных систем управления, и информационного взаимодействия подсистем управления.
3.2.1 AS-интерфейс
AS-интерфейс (международный стандарт EN 50 295) реализует обмен данными следующим образом:
AS-интерфейс является системой с одним ведущим устройством. Это устройство опрашивает поочерёдно все ведомые, ожидая от каждого ответ. Максимальное число ведомых устройств - 31, цикл опроса - 5 мс.
Адрес ведомого устройства является его идентификатором. Присвоение адреса происходит в системе AS-интерфейса только один раз.
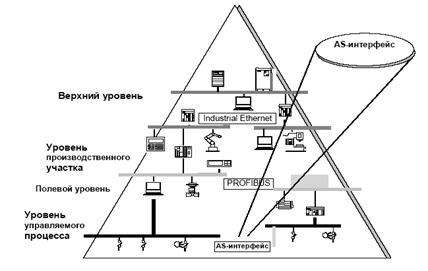
Рис.2. Коммуникационные средства SIMATIC NET
Установку адреса можно выполнить либо с помощью специального модуля задания сетевых адресов, или с помощью ведущего устройства. Адрес постоянно хранится в ведомом устройстве.
Ведущее устройство контролирует сигналы в линии связи, а также передаваемые данные и распознаёт ошибки передачи или выход из строя ведомых.
Замена или добавление ведомых устройств в режиме нормальной работы не окажет влияние на обмен данными с другими ведомыми устройствами.
Физические характеристики интерфейса:
2-жильный кабель для передачи сигналов и подачи напряжения питания. Мощность, которая может быть подана на ведомое устройство, зависит от используемого блока питания AS-интерфейса. Для выполнения соединений предлагается кабель специального типа, исключающий подключение с неправильной полярностью и позволяющий производить подключение пользовательских модулей AS-интерфейса методом прокалывания оболочки кабеля.
Древовидная топология сети при длине кабеля до 100 м. Древовидная топология AS-интерфейса позволяет использовать любую точку сегмента кабеля как начало новой ветви. Суммарная длина всех сегментов может достигать 100 м.
Сигналы физического уровня передаются по протоколу RS485 со скоростью 31,25 кбит/с.
В AS-интерфейсе используются сообщения с постоянной длиной. Отпадает необходимость в сложных процедурах управления передачей и установления длины сообщений или формата данных. Это позволяет ведущему устройству поочерёдно опрашивать все ведомые устройства за 5 мс и обновлять данные как на ведущем, так и на ведомых устройствах в пределах этого цикла. Ведомые устройства являются каналами ввода и вывода AS-интерфейса. Они активны только тогда, когда вызываются ведущим устройством и выполняют определённые действия или передают ответы на ведущее устройство по его команде. Каждое стандартное ведомое устройство может принимать 4 бита данных и передавать также 4 бита.
В системах SIMATIC роль ведущих устройств играют коммуникационные процессоры (CP), которые управляют обменом данных, или системы распределенного ввода/вывода (шлюзы, обеспечивающие доступ к исполнительным механизмам и датчикам, например, из PROFIBUS DP).
3.2.2 Сеть Profibus-DP
Технологии сетей PROFIBUS (Siemens) подразделяются на 3 протокола: DP, FMS и PA. Profibus-DP оптимизирован для быстрого обмена данными между системами автоматизации и децентрализованной периферией. FMS-сервисы (Fieldbus Message Specification) обеспечивают большую гибкость при передаче больших объемов данных. Profibus-DP и Profibus-FMS (стандарт EN 50170) применяют одинаковую технику передачи и единый протокол доступа к шине и поэтому могут работать через общий кабель. PROFIBUS-PA - специальная концепция, позволяющая подключать датчики и приводы, находящиеся во взрывоопасной зоне.
Физический уровень реализован по протоколу RS485 с соответствующими ограничениями по скорости и расстоянию. (Могут использоваться также волоконно-оптические или беспроводные каналы связи). Физически система PROFIBUS состоит из нагруженной с двух сторон активной линии - шинной структуры, которая обозначается, как сегмент шины RS485. Предельные параметры сети приведены в табл.1. К кабельному сегменту можно по стандарту RS-485 подключить до 32 устройств. Стандартные скорости: 9.6 кбит/с, 19.2 кбит/с, 45.45 кбит/с, 93.75 кбит/с, 187.5 кбит/с, 500 кбит/с, 1.5 Мбит/с, 3 Мбит/с, 6 Мбит/с или 12 Мбит/с.
Таблица 1
| Топология | Общая шина или древовидная с использованием повторителей |
| Линия связи | Экранированная витая пара |
| Длина кабельных сегментов |
1000м для скорости 187,5 кбит/с 400 м для скорости 500 кбит/с 200 м для скорости 1,5 Мбит/с 100 м для скорости 3,6 и 12 Мбит/с |
| Количество последовательно подключенных повторителей | Не более 9 |
| Количество узлов |
Не более 32 на кабельном сегменте, не более 127 в сети с повторителями |
В сетях PROFIBUS используются методы доступа “Token Bus" (сеть с передачей маркера или маркерное кольцо) для активных станций и “Master-Slave" (Ведущий-Ведомый) - для пассивных. Алгоритм доступа не зависит от конкретной среды передачи данных и реализуется следующим образом:
Все активные узлы (ведущие) формируют логическое маркерное кольцо, имеющее фиксированный порядок, при этом каждый активный узел "знает" другие активные узлы и их порядок в логическом кольце (порядок не зависит от расположения активных узлов на шине).
Право доступа к каналу передачи данных, так называемый “маркер”, передаётся от активного узла к активному узлу в порядке, определяемом логическим кольцом.
Если узел получил маркер (адресованный именно ему), он может передавать пакеты. Время, отпущенное ему на передачу пакетов, определяется временем удержания маркера. Как только это время истекает, узлу разрешается передать только одно сообщение высокого приоритета. Если такое сообщение отсутствует, узел передаёт маркер следующему узлу в логическом кольце. Маркерные таймеры, по которым рассчитывается максимальное время удержания маркера, конфигурируются для всех активных узлов.
Если активный узел обладает маркером и для него сконфигурированы соединения с пассивными узлами (соединения "ведущее устройство - ведомое устройство"), производится опрос пассивных узлов (например, считывание значений) или передача данных на эти устройства (например, передача команд).
Пассивные узлы никогда не принимают маркер.
При инициализации сети каждому узлу назначается адрес в диапазоне 0-126. Активные узлы, подключенные к PROFIBUS, упорядочены по возрастанию их адреса в логическом маркерном кольце. Время одного обращения маркера через всех активных участников называется временем обращения маркера. Устанавливаемое заданное время обращения маркера Ttr (Time target rotation) определяет максимально разрешенное время обращения маркера.
Адреса всех имеющихся на шине активных узлов заносятся в LAS (List of Active Station - список активных станций). Для управления маркером при этом особенно важны адреса предыдущей станции PS (Previous Station), от которой маркер поступает, и следующей станции NS (Next Station), которой маркер передается. LAS также нужен, чтобы при текущей работе исключать из кольца вышедших из строя или дефектных активных участников и, соответственно, принимать вновь появившихся участников без помех текущему обмену данными по шине.
Метод Master-Slave дает возможность мастеру (активному узлу), который имеет право прямой передачи, опрашивать назначенных ему Slaves (пассивных узлов). Мастер при этом имеет возможность передавать и принимать сообщения от Slave. Цикл обмена между DP-Master и одним DP-Slave состоит из кадра запроса (Request Frame), отправляемого DP-Master, и передаваемого DP-Slave ответа или кадра подтверждения (Response Frame).
При инициализации сети должны согласовано задаваться различные временные параметры, необходимые для контроля работы сети по тайм-аутам. При обмене данными DP-Slave реагирует на кадры-запросы Data_Exchange DP-Master (класс 1), который его параметрировал и конфигурировал. Другие сообщения DP-Slave не обрабатывает. Внутри пользовательских данных нет дополнительных управляющих или структурных элементов для описания передаваемых данных, то есть передаются чистые пользовательские данные. С помощью кадров запрос-ответ можно обмениваться данными между DP-Master и DP-Slave в обоих направлениях объемом до 244 байт. Форматы кадров канального уровня:
Кадр с фиксированной длиной
| SD1 | DA | SA | FC | FCS | ED |
Кадр с фиксированной длиной поля данных
| SD3 | DA | SA | FC | Data unit (l=3 байта) | FCS | ED |
Кадр с переменной длиной поля данных
| SD3 | LE | LEr | DA | SA | FC | Data unit (l=0-244 байта) | FCS | ED |
Кадр квитирования
| SC |
Кадр-token (маркер)
| SD4 | DA | SA |
SC (Single Character) отдельный символ, используется только для квитирования (SC = E5h);
SD1-SD4 (Start Delimiter) стартовый байт для отличия различных форматов (SD1 = 10h, SD2 = 68h, SD3 = A2h, SD4 = DCh);
LE / LEr (LEngth) байт длины, указывает длину информационных полей для кадров с переменной длиной;
DA (Destination Adress) байт адреса узла - приемника;
SA (Source Adress) байт адреса узла - источника;
FC (Frame Control) контрольный байт содержит информацию о службе для данного сообщения и приоритет сообщения;
Data Unit поле данных, может также содержать возможные расширения адреса;
FCS (Frame Check Sequence) проверочный байт, содержит контрольную сумму;
ED (End Delimiter) оконечный байт, указывает на завершение кадра (ED = 16h).
При приеме кадров могут быть распознаны следующие ошибки:
ошибки символьного формата (четность, переполнение, ошибка кадра);
ошибки протокола;
ошибки разделителей начала и окончания;
ошибки байта проверки кадра;
ошибки длины кадра.
Кадр, у которого обнаружена ошибка, повторяется, по крайней мере, один раз. Имеется возможность повторять кадры до 8 раз (шинный параметр Retry). Наряду с передачей данных "точка-точка", могут осуществляться также передачи во многие точки Broadcast и Multicast. При коммуникациях Broadcast активный участник посылает сообщение всем остальным участникам (Master и Slave). Прием данных не квитируется. При коммуникациях Multicast активный узел посылает сообщение группе участников (Master и Slave). Прием данных также не квитируется.
В некоторых случаях необходимо, чтобы шинный цикл DP по времени оставался постоянным (рис.3) и, следовательно, обмен данными должен происходить строго периодически. Это находит применение, например, в технике электроприводов для самосинхронизации нескольких приводов. В отличие от нормального DP цикла при постоянном по времени цикле в DP-Master резервируется определенная часть времени для ациклической передачи данных. Постоянный по времени DP-цикл может быть установлен только в системе с одним мастером.
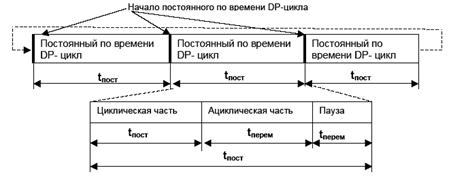
Рис.3. Циклический обмен в PROFIBUS DP
При спроектированной перекрестной связи DP-Slave отвечает не кадром one-to-one (Slave → Master), а специальным кадром one-to-many (Slave → m). Таким образом, входные данные Slave, содержащиеся в ответном кадре, предоставляются не только соответствующему мастеру, но и всем узлам шины.
Интерфейс PROFIBUS DP в функциональных модулях SIMATIC S7 (Siemens) может поддерживаться встроенными интерфейсами модулей, с помощью дополнительных интерфейсных DP-модулей или коммуникационных процессоров.
Таблица 2
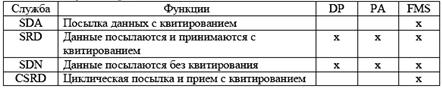
Службы с различными алгоритмами обмена данными (табл.2) вызываются через точки доступа к службе SAP (Service Access Point) из вышестоящего уровня. В PROFIBUS-FMS используются эти точки доступа для адресации логических коммуникационных связей. В PROFIBUS-DP и PA применяемые точки доступа строго упорядочены. У всех активных и пассивных участников можно использовать параллельно несколько точек доступа. Различаются точки доступа источника SSAP (Source Service Access Point) и точки доступа цели DSAP (Destination Service Access Point).
DP-Slave в системе SIMATIC S7 (Siemens) по структуре и функциям подразделяются на 3 группы:
Компактные DP-Slave, модули с фиксированной структурой портов ввода/вывода, доступных для передачи данных.
Модульные DP-Slave,. модули с программируемой структурой портов ввода/вывода, доступных для передачи данных.
Интеллектуальные DP-Slave (I-Slave), как правило, контроллерные модули с передачей данных не из портов ввода/вывода, а из доступного в PROFIBUS адресного пространства ОЗУ.
Для решения типовых коммуникационных задач в PROFIBUS используются профили, объединяющие в единый комплекс необходимый набор сетевых средств. Профили также указывают набор коммуникационных функций, которые должны поддерживать используемые технические средства.
Для PROFIBUS FMS определены следующие профили:
Коммуникации между контроллерами (профиль 3.002). Этот коммуникационный профиль устанавливает, какие FMS-службы применяются для коммуникаций между контроллерами (PLC). Установлены службы, параметры и типы данных, которые каждый PLC должен поддерживать.
Профиль для автоматизации зданий (профиль 3.011). Это отраслевой (специализированный) профиль и основа для многих открытых стандартов в автоматизации зданий. Описывает, как осуществляется обмен, управление, регулирование, обслуживание, обработка и архивирование сигналов в системах автоматизации зданий через FMS.
Коммутационные низковольтные приборы (профиль 3.032) Этот профиль определяет алгоритмы работы низковольтных коммутационных приборов при коммуникациях через FMS.
Установлены следующие профили PROFIBUS-DP:
Профиль NC/RC (профиль 3.052). Профиль описывает управление и обслуживание роботов через PROFIBUS-DP. На основании конкретной блок-схемы алгоритма описывается движение и программное управление роботом.
Профиль Encoder для преобразователя угол-код (профиль 3.062). Профиль описывает подключение Encoder к PROFIBUS-DP. Определены основные и дополнительные функции такие, как масштабирование сигналов и расширенная диагностика.
Профиль для приводов с изменяемым числом оборотов (профиль 3.072). Ведущие производители приводов разработали общий PROFIDRIVE-профиль. Профиль устанавливает, как приводы параметрируются и передают заданные и истинные значения, содержатся необходимые установки для вида работы регуляторов скорости и позиционирования. Профиль устанавливает основные функции приводов и дает свободное пространство для пользовательских расширений. Профиль содержит описание пользовательских функций DP или альтернативных функций FMS.
Профиль для управления и наблюдения HMI (Human Machine Interface) (профиль 3.082). Профиль устанавливает для средств HMI правила подключения через PROFIBUS-DP к компонентам автоматизации. Профиль использует для коммуникаций расширенные функции PROFIBUS-DP.
Профиль для защищенной от ошибок передачи данных через PROFIBUS-DP (профиль 3.092) В этом профиле устанавливаются дополнительные механизмы защиты данных для коммуникаций с защищенными от ошибок компонентами.
В целом, коммуникационные технологии Profibus являются завершенными интерфейсными средствами для систем автоматизации. Эта завершенность, с одной стороны, существенно облегчает их применение. Но, с другой стороны, снижает функциональную гибкость и возможность изменения алгоритмов работы в соответствии с какими-либо требованиями. Интерфейсы Profibus реализованы в полной мере в функциональных модулях различного назначения, предлагаемых фирмой Siemens для решения задач автоматизации в промышленности.
Список литературы
1. Уолрэнд Дж. Телекоммуникационные и компьютерные сети. - М.: Постмаркет, 2007.
2. Олифер В.Г., Олифер Н.А. Компьютерные сети. Принципы, технологии, протоколы. - СПб.: "Питер", 2004.
3. Новиков Ю.В., Кондратенко С.В. Основы локальных сетей. - М.: 2005.
4. Олифер В.Г., Олифер Н.А. Основы сетей передачи данных. - СПб.: "Питер", 2005.
5. Хамбракен Д. Компьютерные сети: Пер. с англ. - М.: ДМК Пресс, 2004.
6. Новиков Ю.В., Кондратенко С.В. Локальные сети. Архитектура, алгоритмы, проектирование. - М.: ЭКОМ, 2009.
7. Нанс Б. Компьютерные сети: Пер. с англ. - М.: "БИНОМ", 2006.