Курсовая работа: Методы и средства обработки аналоговых сигналов
Курсовая работа по "Системы реального времени"
СОДЕРЖАНИЕ
Задание
Аннотация
Информационный расчет
Нагрузочный расчет
Топологический расчет
Анализ результатов
Литература
ЗАДАНИЕ НА КУРСОВОЕ ПРОЕКТИРОВАНИЕ
Разработать проект автоматизированной системы предназначенной для научных исследований, обучения и производственных испытаний системы сбора и обработки аналоговых сигналов, снимаемых с датчиков, установленных на некотором испытательном комплексе, например, на газотурбинном двигателе.
Исходные данные к проекту: Вариант № 17.
Таблица 1
| ПАРАМЕТРЫ ОБЪЕКТА ИССЛЕДОВАНИЯ (ОИ) | |||
| № группы датчиков | Количество датчиков в группе | Вид корреляционной функции сигналов на выходе датчиков | Параметр корреляционной функции |
| j |
mj |
Rj |
a |
| 1 | 9 |
exp(-a2t2) |
20 |
| 2 | 2 | exp(-a|t|) | 80(0,08) |
| 3 | 5 | sin(at)/(at) | 30 |
| 4 | 11 | exp(-a|t|)(cos(at)+sin(at)) | 0,8 |
Таблица 2
| МЕТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ АСНИ | ||
| Время сбора данных, Сек | Допустимая ошибка восстановления сигнала в % от его шкалы, по критерию оценки погрешности восстановления сигнала: среднеквадратического отклонения – (ск) | Допустимый резерв загрузки ЭВМ в рабочей точке |
|
Tсб |
e0 |
R0 |
| 15 | 3,5 (ск) | 0,10. |
Таблица 3
| КООРДИНАТЫ ДАТЧИКОВ | |||
| Порядковый номер датчика | № датчика в циклограмме | Координаты датчиков | |
|
Xi |
Yi |
||
| 1 | 11 | 47 | 77 |
| 2 | 12 | 25 | 80 |
| 3 | 13 | 72 | 82 |
| 4 | 14 | 60 | 75 |
| 5 | 15 | 85 | 55 |
| 6 | 16 | 75 | 72 |
| 7 | 17 | 57 | 87 |
| 8 | 18 | 87 | 71 |
| 9 | 19 | 72 | 51 |
| 10 | 21 | 75 | 35 |
| 11 | 22 | 71 | 26 |
| 12 | 31 | 80 | 40 |
| 13 | 32 | 56 | 26 |
| 14 | 33 | 82 | 20 |
| 15 | 34 | 60 | 15 |
| 16 | 35 | 71 | 14 |
| 17 | 41 | 36 | 17 |
| 18 | 42 | 22 | 18 |
| 19 | 43 | 20 | 25 |
| 20 | 44 | 11 | 54 |
| 21 | 45 | 22 | 40 |
| 22 | 46 | 30 | 22 |
| 23 | 47 | 43 | 85 |
| 24 | 48 | 27 | 52 |
| 25 | 49 | 40 | 25 |
| 26 | 410 | 15 | 35 |
| 27 | 411 | 25 | 60 |
Основные требования к АСНИ «Методы и средства обработки аналоговых сигналов»
Система должна обеспечивать одновременный сбор и первичную обработку информации с заданного количества датчиков в течении заданного интервала времени. Ошибки восстановления сигналов по полученным отсчетам должны быть не более заданных значений.
Резерв по загрузке ЭВМ в рабочей точке на этапе сбора данных должен быть не менее заданной величины.
Задание получила (число, месяц, год)
Подпись_____________
Задание выдал (преподаватель)
Подпись_____________
АННОТАЦИЯ
В проекте разработана автоматизированная система, предназначенная для научных исследований и производства испытаний газотурбинных двигателей (АСНИ ГТД).
Исходные данные приведены в начале пояснительной записки к курсовому проекту.
Проект включает следующие этапы:
Информационный расчет (для интерполяции 1 порядка)
Нагрузочный расчет (основной)
Топологический расчет
Анализ результатов
На первом этапе получены реальные частоты опроса датчиков и информационная производительность объекта исследований. Информационный расчет проводился для метода линейной интерполяции. В результате получена следующая суммарная частота следования выборок с датчиков:
C0=9×50,51661+2×632,708+5×13,378019+11∙3,454699=1825 (Гц).
По минимуму суммарной производительности системы сбора определена наиболее подходящая разрядность АЦП – 6.
На втором этапе построена адаптивная равномерная циклограмма опроса системы датчиков АСНИ и получена ее рабочая частота Срт= 1748,786688 (Гц). Произведен расчет рабочей нагрузки АСНИ, построена ее потенциальная нагрузочная характеристика. Производительность системы в рабочей точке составила Сs =2538,07 ( Гц), резерв по нагрузке равен R = 0,10. По критерию минимальной стоимости сформирован оптимальный состав аппаратно-программного комплекса АСНИ. Окончательный вариант АСНИ состоит из 4-х 8-и канальных 6-и разрядных УСД, ЭВМ №1, ОС №1, последовательного интерфейса и 3-ех блоков памяти по 16 кбайт каждый. Общая стоимость системы Qs=16834,735 у.е.
На третьем этапе расчета определена топология сети и размещение АСНИ в монтажном пространстве. Уточнено количество УСД:4.
На четвертом этапе произведена оценка показателей эффективности окончательного варианта АСНИ. Информационная избыточность АСНИ в целом равна:
hs = (hусд +1)( hвд +1)( hд +1) - 1 = (0,1748+1)(0,1648+1)(0,33+1) - 1 = 0,8199.
Стоимостной дисбаланс
АСНИ, характеризующий асимметрию загрузки системы, равен: ![]()
ИНФОРМАЦИОННЫЙ РАСЧЕТ
Информационный расчет для линейной интерполяции выполняется с использованием формул среднеквадратической и максимальной ошибок для линейной интерполяции.
Цель информационного расчета - определение информационной производительности ОИ, обеспечивающей получение конечных результатов с допустимой точностью. При этом необходимо решить следующие задачи:
выбрать способ восстановления сигналов по дискретным отсчетам;
рассчитать параметры квантования сигналов с датчиков по критерию минимума информационной производительности ОИ;
сделать предварительный выбор устройств сбора данных.
Выбор способа восстановления сигналов по дискретным отсчетам осуществляется между ступенчатой и линейной интерполяцией. В начале, как наиболее простая, выбирается ступенчатая интерполяция, и производятся расчет параметров квантования сигналов и предварительный выбор устройств. Но рассчитанные таким образом информационная производительность ОИ и выбранные УСД могут предъявлять чрезмерно высокие требования к ЭВМ (выходить за пределы их возможностей), в этом случае требуется перейти к более сложной, но и более экономичной линейной интерполяции. Линейная интерполяция при тех же частотах, что и в случае ступенчатой интерполяции дает гораздо меньшую погрешность, поэтому допустимую погрешность можно получить на значительно меньших частотах опроса, чем при ступенчатой интерполяции. Проверка соответствия выбранного метода интерполяции и ЭВМ откладывается на этап нагрузочного расчета.
Расчет параметров квантования сигналов осуществляется по следующим формулам:
1. Основная цель данного этапа - расчет частот опроса датчиков, причем таких частот, которые в последующем позволят восстановить сигнал с заданной точностью. Для выполнения этого условия необходимо выполнение неравенства:
При среднеквадратической ошибке – (ск): e2(n,Dt)£ D2 (1)
При максимальной ошибке – (м): e(n,Dt)£ D (2)
Здесь D - граница для допустимой ошибки
восстановления сигнала, задаваемая в процентах от диапазона сигнала (шкала
сигнала) и зависит от дисперсии сигнала - ![]()
при равномерном распределении сигнала
![]()
при нормальном распределении сигнала
![]()
По заданию сигнал распределен по нормальному закону. По закону 3s за достоверные значения с вероятностью большей 90% принимаются только те, которые лежат на далее 3s влево и вправо от точки математического ожидания. Ширина этого диапазона D именуется шкалой.
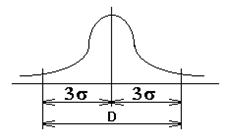
Тогда: D=e0*D
D=6*ss
D2=36*ss2 => ss2=D2/36
D2=36*ss2*e02
Если ошибка составляет 1% от шкалы сигнала с нормальным распределением, то это значит при критерии максимальной ошибки:
![]()
и соответственно при
критерии СКО: ![]()
![]()
Среднеквадратическая ошибка при линейной интерполяции имеет вид
![]() (4)
(4)
Независимо от выбранного критерия оценки погрешности ошибка восстановления сигнала включает две аддитивные составляющие:
- погрешность квантования сигнала по уровню
 (5)
(5)
- погрешность дискретизации сигнала по времени
 (6)
(6)
Здесь n - число
двоичных символов отводимых на кодирование одного отсчета, ss2 - дисперсия сигнала, ![]() - корреляционная функция
сигнала.
- корреляционная функция
сигнала.
Подставив выражения (3), (4), (5), (6) в (1) получим:
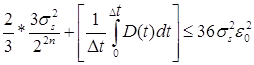 ,
,
где 
Разрешив это неравенство, как:
fi£j(n, e), найдем частоты опроса датчиков в зависимости от размера разрядной сетки для кодирования одного отсчета и допустимой ошибки восстановления.
Для удобства интегрирования корреляционную функцию R(t) целесообразно разложить в ряд Маклорена с точностью до двух первых ненулевых членов ряда.
Рассчитав частоты опроса датчиков в зависимости от n построим функцию информационной производительности для каждого датчика (одного из датчиков в группе однотипных датчиков):
Bi=ni×fi
Здесь Bi - информационная производительность i-го датчика, ni - число двоичных символов отводимых на кодирование одного отсчета с i-го датчика (разрядность АЦП), fi - частота опроса i-го датчика.
Точка минимума функции информационной производительности указывает на оптимальную производительность датчика из которой вычисляется оптимальная частота опроса:
fopt=Bopt/nopt
|
Поскольку датчики внутри групп эквивалентны по частоте, то указанный расчет достаточно произвести только для одного датчика из каждой группы.
РАСЧЕТ
1-ая группа датчиков.
a=20 [1/сек].
Вид модели сигнала
R(t)=exp(-a2t2)
Ряд Маклорена

e2(n,Dt)£ D2


![]()
Таблица 4
|
n |
fi |
bi |
ci |
| 5 | 50,51661 | 252,5831 | 454,6495 |
| 6 | 44,94288 | 269,6573 | 404,4859 |
| 7 | 43,95093 | 307,6565 | 395,5584 |
| 8 | 43,71941 | 349,7553 | 393,4747 |
| 9 | 43,66247 | 392,9623 | 392,9623 |
| 10 | 43,6483 | 436,483 | 392,8347 |
nopt=5
fopt=50,51661
Bopt=252,5831
С1=454,6495
![]()
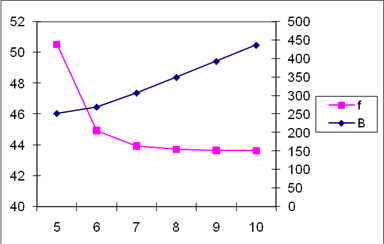
Рис.4
2-ая группа датчиков.
a=80 [1/сек].
m=2
Ряд Маклорена:
Вид модели сигнала:
R(t)=exp*(-a|t|).
e2(n,Dt)£ D2
![]()
![]()
Таблица 5
|
n |
fi |
bi |
ci |
| 5 | 632,708 | 3163,54 | 1265,416 |
| 6 | 611,4564 | 3668,739 | 1222,913 |
| 7 | 606,3648 | 4244,553 | 1212,73 |
| 8 | 605,1051 | 4840,84 | 1210,21 |
| 9 | 604,7909 | 5443,119 | 1209,582 |
| 10 | 604,7125 | 6047,125 | 1209,425 |
nopt=5
fopt=632,708
Bopt=3163,54
С1=1265,416
![]()
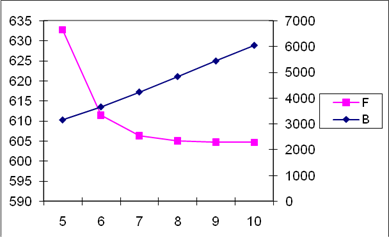
Рис. 5
3-ая группа датчиков
a=30 [1/сек];
m=5;
Вид модели сигнала R(t)=sin(at)/(at)
Ряд Маклорена
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
e2(n,Dt)£ D2
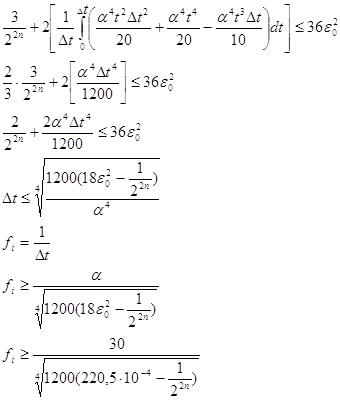
Таблица 6
|
n |
fi |
bi |
ci |
| 5 | 13,37803 | 66,89014 | 66,89014 |
| 6 | 13,26425 | 79,58549 | 66,32124 |
| 7 | 13,23655 | 92,65584 | 66,18274 |
| 8 | 13,22967 | 105,8373 | 66,14834 |
| 9 | 13,22795 | 119,0516 | 66,13976 |
| 10 | 13,22752 | 132,2752 | 66,13761 |
nopt = 5
fopt = 13,37803
Bopt = 66,89014
С1= 66,89014
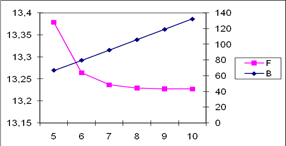
Рис. 6
4-ая группа датчиков
a=0,8 [1/сек];
m=11;
Вид модели сигнала
R(t)=![]() .
.
Ряд Маклорена
Таким об разом: ![]()
e2(n,Dt)£ D2
![]()
Таблица 7
|
n |
fi |
bi |
ci |
| 5 | 3,454699 | 17,2735 | 38,00169 |
| 6 | 3,415579 | 20,49347 | 37,57137 |
| 7 | 3,406072 | 23,8425 | 37,46679 |
| 8 | 3,403712 | 27,22969 | 37,44083 |
| 9 | 3,403123 | 30,6281 | 37,43435 |
| 10 | 3,402975 | 34,02975 | 37,43273 |
nopt = 4
fopt = 3,454699
Bopt = 17,2735
С1= 38,00169
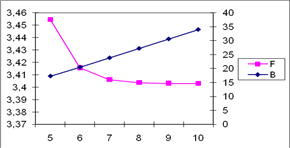
Рис. 7
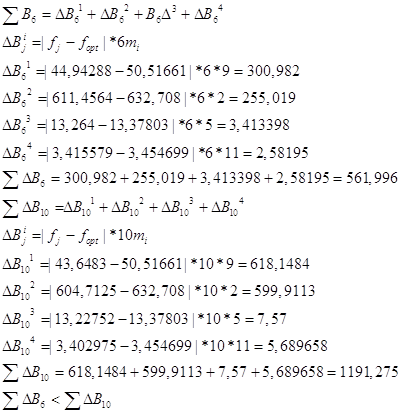
Так как DB6 <DB10, то выбираем nацп = 6.
![]()
Результаты расчетов параметров квантования сведем в таблицу:
Таблица8
| № группы датчиков | Количество датчиков в группе | Параметры квантования | |
| j |
mj |
foj, Гц |
nацп |
| 1 | 9 | 51 | 6 |
| 2 | 2 | 633 | 6 |
| 3 | 5 | 13 | 6 |
| 4 | 11 | 4 | 6 |
Информационная избыточность вносимая УСД:
![]()
НАГРУЗОЧНЫЙ РАСЧЕТ
Цель нагрузочного расчета - формирование рабочей нагрузки АСНИ во времени между устройствами системы. При этом необходимо решить следующие задачи:
выбрать режим сбора и первичной обработки данных;
рассчитать параметры временной диаграммы работы АСНИ по критерию минимума непроизводительных затрат при ограничении на скорость сбора данных;
рассчитать требуемый объем оперативной памяти;
выбрать ЭВМ, состав программного обеспечения и интерфейс (предварительно) из заданного набора альтернативных вариантов.
Снятие показания с датчика и его первичную обработку будем считать прикладной задачей. Для опроса i-го датчика каждый раз запускается i-ая прикладная задача. В начале расчета подсчитывается С0 - суммарная частота запуска прикладных задач по следующей формуле:

Здесь m - число датчиков в системе, foi - частота опроса i-го датчика (получены на этапе информационного расчета).
Вводится понятие потенциальной нагрузочной характеристики (ПНХ). Она характеризует уменьшение потенциальных возможностей системы, при увеличении расходов на диспетчеризацию. Расход на диспетчеризацию тем больше, чем чаще появляются запросы на запуск прикладных задач. В общем виде ПНХ может быть представлена следующим образом:
rn(C)=1-rд(C)
Здесь rд(C) - приведенные затраты процессорного времени на диспетчеризацию.
rд(С)=1-rп(С)
0£rn(C)£1
Конкретный вид ПНХ определяется выбранной операционной системой (ОС). Операционная система выбирается в соответствии с запросами системы и с учетом критерия минимизации стоимости системы. Наиболее быстродействующей является 3-я ОС.
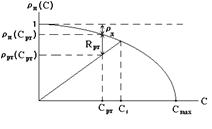
Рис. 8
Каждому рабочему режиму АСНИ на плоскости нагрузочной характеристики соответствует рабочая точка (РТ) с координатами: Cрт и rрт.
![]()
rрт=Срт(tусд+tинт+tпо)
tусд - задержка вносимая УСД.
![]()
Здесь Сусд - максимальная скорость преобразования, выбирается из [1] пункт 6.2.3 таблица 2.
tинт - задержка вносимая интерфейсом при обмене данными между ЭВМ и УСД, выбирается из П1 пункт 6.2.4 таблица 4.
tпо - затраты процессорного времени не связанные с обменом (подготовительные операции, первичная обработка).
При выборе ОС значения t1 и t2, а также tпо даны для 3-ей ЭВМ. Для их пересчета на выбранный вариант ЭВМ используются формулы:
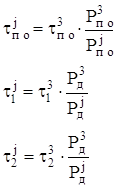
Здесь ![]() ,
, ![]() ,
, ![]() - значения для выбранной
ЭВМ;
- значения для выбранной
ЭВМ;
![]() ,
, ![]() ,
,
![]() - значения для 3-ей ЭВМ;
- значения для 3-ей ЭВМ;
![]() ,
, ![]() ,
,
![]() ,
, ![]() - индивидуальные
коэффициенты производительности.
- индивидуальные
коэффициенты производительности.
Для выполнения ограничений на верность восстановления сигнала необходимо, чтобы на этапе сбора данных частоты опроса датчиков были равномерными и лежали в заданных пределах:
fi ³ foi
Здесь foi - частота опроса i-го датчика при выбранной разрядности АЦП (nацп), полученные на этапе информационного расчета; fi - реальная частота опроса i-го датчика. fi может быть больше foi для выбранной разрядности АЦП, но не меньше, так как в этом случае не будет обеспечено восстановление сигнала с заданной точностью.
Варьируя значением fi мы перемещаем РТ по плоскости ПНХ (по координате Срт), тем самым выбирая выгодное для нас положение РТ, при котором обеспечивается восстановление сигнала с заданной точностью и минимальная стоимость используемого оборудования. Изменение стоимости происходит за счет выбора различных устройств (движение по координате rрт).
При выборе fi и устройств необходимо обеспечить выполнение условия:
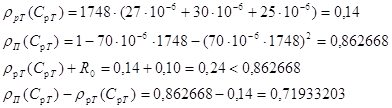
rn(Срт) ³ rрт(Срт)+R0 или
R0³ rn(Срт)-rрт(Срт)
Здесь R0 - допустимый резерв загрузки ЭВМ в РТ заданный в техническом задании. Для удобства обозначим:
 =f0
=f0
Последовательность запуска прикладных задач формируется по циклограмме, которая представляет собой список номеров задач, расположенных в нужной последовательности. В начале каждого такта диспетчер по сигналу от таймера считывает очередной элемент циклограммы и запускает соответствующую задачу. По окончании циклограммы происходит возврат к ее начальному элементу. В циклограмме могут быть не заполненные такты. Это означает, что в соответствующем такте временной диаграммы выполняется фоновая работа (например, завершение ранее прерванных задач).
Если пронумеровать все такты временной диаграммы элементами натурального ряда чисел , то последовательность номеров тактов, в которых вызывается i-ая задача, можно рассматривать как класс вычетов j i по модулю r i. Здесь ji (начальная фаза) - номер такта временной диаграммы, в котором i-ая задача вызывается в первый раз; ri (тактовое расстояние) - расстояние между соседними моментами запуска i-ой задачи, выраженное в тактах временной диаграммы. ri и ji - целые числа. Тогда частоты запуска задач:
f i = f0 / r i

Рис. 9
Выбор параметров временной диаграммы f0, j=[j1,j2,...,jm], r=[r1,r2,...,rm], где m - число датчиков в системе, следует проводить по критерию минимума суммарной загрузки процессора. Чем меньше загрузка процессора, тем менее производительный процессор можно использовать в АСНИ, а следовательно снизить ее стоимость. Для поиска минимальной загрузки процессора необходимо решить следующую задачу:
![]()
При следующих ограничивающих условиях:
ri £ f0/foi - ограничение на погрешность восстановления, вытекающее из требования fi ³ foi и fi=f0/ri; ji(mod ri)¹jj(mod rj) - требование, согласно которому в каждом такте временной диаграммы должно начинаться выполнение не более одной задачи;
н.о.к (r1,r2,r3,...,rm)£N0 - ограничение на длину циклограммы, накладываемое оперативной памятью (н.о.к - наименьшее общее кратное).
На этапе предпроектного анализа целесообразно использовать следующий подход к выбору параметров временной диаграммы. Примем тактовое расстояние ri равным ближайшей к f0/foi степени числа 2, меньшей f0/foi, т.е. ri=[f0/foi]2=2a. При этом задача сведется к нахождению величины f0, минимизирующей суммарную загрузку процессора
rS(f0)=rрт(f0)+rд(f0)
при следующем ограничении:
Здесь Кз.ц. - коэффициент загрузки циклограммы, характеризует долю ненулевых элементов в циклограмме, М - число датчиков в системе.
Функция rS(f0) имеет пилообразный характер, причем, локальные минимумы наблюдаются в “особых” точках, имеющих следующие значения:
S(k,i) = foi × 2k,
i=1,2,...,m k=1,2,....
Значение частоты f0, обращающее rS в минимум, лежит на интервале [C0, 2C0] в одной из особых точек. Напомним, что:
![]()
Ограничивающее условие Кз.ц. можно записать в следующем виде:
Здесь K - число групп датчиков, Мj - число датчиков в j-ой группе, (2к)j - тактовое расстояние кратное степени числа 2 для j-ой группы.
Алгоритм определения параметров временной диаграммы состоит из следующих этапов:
ЭТАП 1
Вычисление области поиска рабочей частоты циклограммы f0: [C0, 2С0] – значения тактовой частоты циклограммы из указанного интервала должны выбираться по возможности наименьшими, что снизит требования на быстродействие КТС.
РАСЧЕТ:
C0 = 9∙44.94288+2∙611.45+5∙13.26425+11∙3.415579=1731.291
Область поиска рабочей частоты циклограммы: [1731.291; 3462.583]
ЭТАП 2
Значения тактовой частоты
циклограммы из найденного интервала могут определяться, например, наличием
генератора стабильной частоты, но предпочтительнее их выбирать из тех, которые
обеспечивают более близкое к 1 значение ![]() .
.
Выбор предпочтительных частот:
С0 £ foi×2a £ 2C0
Для каждой группы датчиков вычисляется:
Сj = fj × 2a
Здесь fj - частота опроса foi любого датчика j-ой группы.
РАСЧЕТ:
C1 = 44.94288×26 = 2876.34432 ![]() [1731.291; 3462.583]
[1731.291; 3462.583]
C2 = 611.45×22 = 2445.8 ![]() [1731.291; 3462.583]
[1731.291; 3462.583]
C3 = 13.26425×28 = 3395.6 ![]() [1731.291; 3462.583]
[1731.291; 3462.583]
C4 = 3.415579×29 = 1748.786688 ![]() [1731.291; 3462.583]
[1731.291; 3462.583]
ЭТАП 3
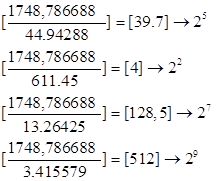
Из рассчитанных для каждой группы Сj выбирается наименьшая Сj и проверяется в качестве тактовой частоты циклограммы - f0. Вычисляются тактовые расстояния для каждой группы датчиков - значения (2к)j=[f0/foi]2 .
По условию построения равномерной адаптивной циклограммы тактовые расстояния в нашем случае выбираются кратными степени двойки, что может иметь то преимущество, что в качестве задатчика циклограммы можно использовать двоичный счетчик. Если для выбранной частоты циклограмма может быть построена - удовлетворяется условие Кз.ц. £ 1, то f0 считается допустимой и квазиоптимальной для всех особых точек rS(f0). В противном случае она отбрасывается и этап 3 повторяется для других по порядку возрастания Сj . При таком подходе полученная f0 является минимальной из возможных, где загрузка процессора также минимальна.
Расчет:
Начинаем подбор с C4 =1748,786688:
Вычислим коэффициент заполнения циклограммы:
![]()
Так как условие Кз.ц. £ 1 выполняется, то в качестве Срт выбирается С4:
f0 = Срт = С4 = 1748,786688 Гц.
ЭТАП 4
Вычисляются тактовые расстояния и частоты запуска для каждой прикладной задачи:
ri = [f0 / foi]2
fi = f0 / r i
Каждой прикладной задаче в порядке возрастания тактовых расстояний назначается начальная фаза ji и составляется циклограмма.
Вычисляется длина циклограммы:
Nц = max{r1,r2,...,rm}
Номера датчикам назначаются следующим образом: 1-ая цифра - номер группы, которой принадлежит датчик, 2-ая цифра - номер датчика в группе.
РАСЧЕТ:
Параметры временной диаграммы сведем в таблицу:
Таблица 9
|
№ Датчика |
Параметры Циклограммы |
Частота Опроса, Гц | ||
|
i |
ri |
ji |
foi |
fi |
| 11 | 32 | 3 | 44,9428 | 44,9428 |
| 12 | 32 | 4 | 44,9428 | 44,9428 |
| 13 | 32 | 7 | 44,9428 | 44,9428 |
| 14 | 32 | 8 | 44,9428 | 44,9428 |
| 15 | 32 | 11 | 44,9428 | 44,9428 |
| 16 | 32 | 12 | 44,9428 | 44,9428 |
| 17 | 32 | 15 | 44,9428 | 44,9428 |
| 18 | 32 | 16 | 44,9428 | 44,9428 |
| 19 | 32 | 19 | 44,9428 | 44,9428 |
| 21 | 4 | 1 | 13,26425 | 719,08608 |
| 22 | 4 | 2 | 13,26425 | 719,08608 |
| 31 | 128 | 20 | 611,45 | 22,44144 |
| 32 | 128 | 23 | 611,45 | 22,44144 |
| 33 | 128 | 24 | 611,45 | 22,44144 |
| 34 | 128 | 27 | 611,45 | 22,44144 |
| 35 | 128 | 28 | 611,45 | 22,44144 |
| 41 | 512 | 31 | 3,415579 | 5,61786 |
| 42 | 512 | 32 | 3,415579 | 5,61786 |
| 43 | 512 | 52 | 3,415579 | 5,61786 |
| 44 | 512 | 55 | 3,415579 | 5,61786 |
| 45 | 512 | 56 | 3,415579 | 5,61786 |
| 46 | 512 | 59 | 3,415579 | 5,61786 |
| 47 | 512 | 60 | 3,415579 | 5,61786 |
| 48 | 512 | 63 | 3,415579 | 5,61786 |
| 49 | 512 | 64 | 3,415579 | 5,61786 |
| 410 | 512 | 68 | 3,415579 | 5,61786 |
| 411 | 512 | 71 | 3,415579 | 5,61786 |
Длина циклограммы:
Nц = max{r1,r2,...,rm}= 512 тактов.
Построим циклограмму:
Таблица 10
| 21 | 22 | 11 | 12 | 21 | 22 | 13 | 14 | 21 | 22 | 15 | 16 | 21 | 22 | 17 | 18 |
| 21 | 22 | 19 | 31 | 21 | 22 | 32 | 33 | 21 | 22 | 34 | 35 | 21 | 22 | 41 | 42 |
| 21 | 22 | 11 | 12 | 21 | 22 | 13 | 14 | 21 | 22 | 15 | 16 | 21 | 22 | 17 | 18 |
| 21 | 22 | 19 | 43 | 21 | 22 | 44 | 45 | 21 | 22 | 46 | 47 | 21 | 22 | 48 | 49 |
| 21 | 22 | 11 | 12 | 21 | 22 | 13 | 14 | 21 | 22 | 15 | 16 | 21 | 22 | 17 | 18 |
| 21 | 22 | 19 | 410 | 21 | 22 | 411 | 21 | 22 | 21 | 22 | |||||
| 21 | 22 | 11 | 12 | 21 | 22 | 13 | 14 | 21 | 22 | 15 | 16 | 21 | 22 | 17 | 18 |
| 21 | 22 | 19 | 21 | 22 | 21 | 22 | 21 | 22 | |||||||
| 21 | 22 | 11 | 12 | 21 | 22 | 13 | 14 | 21 | 22 | 15 | 16 | 21 | 22 | 17 | 18 |
| 21 | 22 | 19 | 31 | 21 | 22 | 32 | 33 | 21 | 22 | 34 | 35 | 21 | 22 | ||
| 21 | 22 | 11 | 12 | 21 | 22 | 13 | 14 | 21 | 22 | 15 | 16 | 21 | 22 | 17 | 18 |
| 21 | 22 | 19 | 21 | 22 | 21 | 22 | 21 | 22 | |||||||
| 21 | 22 | 11 | 12 | 21 | 22 | 13 | 14 | 21 | 22 | 15 | 16 | 21 | 22 | 17 | 18 |
| 21 | 22 | 19 | 21 | 22 | 21 | 22 | 21 | 22 | |||||||
| 21 | 22 | 11 | 12 | 21 | 22 | 13 | 14 | 21 | 22 | 15 | 16 | 21 | 22 | 17 | 18 |
| 21 | 22 | 19 | 21 | 22 | 21 | 22 | 21 | 22 | |||||||
| 21 | 22 | 11 | 12 | 21 | 22 | 13 | 14 | 21 | 22 | 15 | 16 | 21 | 22 | 17 | 18 |
| 21 | 22 | 19 | 31 | 21 | 22 | 32 | 33 | 21 | 22 | 34 | 35 | 21 | 22 | ||
| 21 | 22 | 11 | 12 | 21 | 22 | 13 | 14 | 21 | 22 | 15 | 16 | 21 | 22 | 17 | 18 |
| 21 | 22 | 19 | 21 | 22 | 21 | 22 | 21 | 22 | |||||||
| 21 | 22 | 11 | 12 | 21 | 22 | 13 | 14 | 21 | 22 | 15 | 16 | 21 | 22 | 17 | 18 |
| 21 | 22 | 19 | 21 | 22 | 21 | 22 | 21 | 22 | |||||||
| 21 | 22 | 11 | 12 | 21 | 22 | 13 | 14 | 21 | 22 | 15 | 16 | 21 | 22 | 17 | 18 |
| 21 | 22 | 19 | 21 | 22 | 21 | 22 | 21 | 22 | |||||||
| 21 | 22 | 11 | 12 | 21 | 22 | 13 | 14 | 21 | 22 | 15 | 16 | 21 | 22 | 17 | 18 |
| 21 | 22 | 19 | 31 | 21 | 22 | 32 | 33 | 21 | 22 | 34 | 35 | 21 | 22 | ||
| 21 | 22 | 11 | 12 | 21 | 22 | 13 | 14 | 21 | 22 | 15 | 16 | 21 | 22 | 17 | 18 |
| 21 | 22 | 19 | 21 | 22 | 21 | 22 | 21 | 22 | |||||||
| 21 | 22 | 11 | 12 | 21 | 22 | 13 | 14 | 21 | 22 | 15 | 16 | 21 | 22 | 17 | 18 |
| 21 | 22 | 19 | 21 | 22 | 21 | 22 | 21 | 22 | |||||||
| 21 | 22 | 11 | 12 | 21 | 22 | 13 | 14 | 21 | 22 | 15 | 16 | 21 | 22 | 17 | 18 |
| 21 | 22 | 19 | 21 | 22 | 21 | 22 | 21 | 22 |
Заполнение циклограммы начинают с отведения тактов для датчиков с меньшими тактовыми расстояниями. Датчикам присваиваются двухзначные номера, где первая цифра означает номер группы датчика, а вторая цифра номер датчика в группе.
После построения циклограммы опроса рассчитываются rрт и rп для выбранного оборудования, и проверяется условие:
rп ³ rрт + R0 (7)
Если необходимо делаются замены в составе аппаратно-программного обеспечения и вновь проверяется условие. Таким образом выбирается необходимое оборудование.
С целью уменьшения трудоемкости расчетов целесообразно на начальном этапе исключить из рассмотрения сочетание программно-аппаратных средств АСНИ, заведомо недопустимых по производительности. Для этих вариантов не выполняется хотя бы одно из следующих неравенств:
rп(С0) ³ rрт(С0) + R0 (8)
МVзсд+Vос+Nц+С0 n0 Tсб £ maxVозу (9)
Здесь М - число датчиков в системе; Vзсд и Vос - объем занимаемой ОП выбранными ЗСД и ОС соответственно; Тсб - время сбора данных (задается в техническом задании); Vозу - имеющийся объем ОП в выбранной ЭВМ; n0=[nацп/8], где[ ] означает дополнение до большего целого.
Объем занимаемой оперативной памяти ЭВМ в РТ рассчитывается по формуле:
Vозу= МVзсд+Vос+Nц+Срт n0 Tсб
Также необходимо чтобы объем занимаемой памяти был меньше максимально допустимого объема ОП выбранной ЭВМ:
Vозу£ maxVозу.
Конкретного алгоритма выбора оптимальных устройств мы предложить не можем. Выбор может осуществляться как простым перебором, так и с использованием анализа оборудования (например, отсеять устройства для которых заведомо не выполняются описанные выше устройства). Задачу выбора работоспособного варианта системы сбора и обработки данных по проектированной системе можно было бы решить простым перебором, но такой подход даже в данном случае (ЭВМ-7, интерфейс-3, УСД-4, ОС-3) предполагает проверку 7*3*4*3=252 возможных вариантов решения, что является достаточно трудоемкой задачей.
Задача выбора оптимального варианта состава системы относится к классу целочисленных аддитивных задач динамического программирования, решение которых предполагает определенную последовательность выбора функциональных элементов системы [3], учитывающую характер изменения целевой функции при выборе последовательности шагов нахождения работоспособной системы минимальной стоимости (в нашем случае).
Подбор начинают с выбора подходящего варианта элемента системы, обладающего большим значением целевой функции (наибольшей стоимостью), после которого переходят к выбору элементов, обладающих наибольшей стоимостью по отношению к оставшимся и т.д.
До выполнения топологического расчета неизвестной является стоимость системы связи, поэтому выполненный нагрузочный расчет является неокончательным и требует уточняющей проверки после определения стоимости интерфейсов.
Также, рекомендуется проверять условие (9) на любом этапе нагрузочного расчета.
РАСЧЕТ:
Так как для нашего варианта имеется только один алгоритм ЗСД, то можно рассчитать объем ОП занимаемый ЗСД:
МVзсд=27×200=5400 байт
Также можно рассчитать объем ОП занимаемый циклограммой и регистрируемой измерительной информацией на этапе сбора данных (так как при выборе оборудования они остаются неизменными):
Срт×n0×Tсб+Nц=1748,786688 ×1×15+512= 26732 байт
Минимальный объем ОП занимаемый ОС:
Vос=10×1024=10240 байт
Таким образом минимальный требуемый объем ОП:
Vозу=МVзсд+Vос+Nц+Cрт×n0×Tсб = 5400+26732+10240=42581 байт
Vозу < 64 кб=42581байт
Поэтому выбор ЭВМ возможен между 1-ой ,2-ой, 3-ей,4-й, 5-ой, 6-ой и 7-ой машиной. Дальнейший подбор устройств КТС рекомендуется проводить в такой последовательности, когда сначала подбираются более дорогостоящие составляющие КТС и ПО: ЭВМ, интерфейс, УСД и ОС. Так как все параметры задержек задаются в методическом пособии для третьей машины, соответствующие параметры для других ЭВМ определяются с помощью коэффициентов. В нашем случае, так как 1-ая ЭВМ дешевле, то целесообразнее выбрать ее. Проверим выполнение условия для 1-ой ЭВМ:
Пересчитаем tпо на 1-ую машину:
![]() мкс
мкс
Выберем самое быстродействующее оборудование и ПО:
параллельный интерфейс
![]() сек
сек
3-й вариант УСД
![]() сек
сек
3-й вариант ОС (пересчитаем на 1-ую ЭВМ)
![]() сек
сек
Так как резерв по нагрузке для выбранных устройств значительно превышает допустимый, то выберем более дешевые и менее быстродействующие устройства. Так как львиная доля стоимости приходится на сеть связи, то желательно значительно снизить стоимость интерфейса. Возьмем самый дешевый 3-й вариант интерфейса, а также более дешевое УСД - 1-й вариант.
Проверим выполнение условия (7):
tусд=100 мкс
tинт=100 мкс
Так как нам необходимо добиться максимальной приближенности к резерву по нагрузке, то возьмем более дешевое ОС(2-й вариант):
Так как нам необходимо добиться максимальной приближенности к резерву по нагрузке, то возьмем самое дешевое ОС(1-й вариант):
В курсовом проекте рассмотрена только 1 ЭВМ, остальные шесть ЭВМ также проверены. На основе проверки всех семи ЭВМ выбрана наиболее оптимальное 1 ЭВМ с оптимальными величинами УСД, интерфейса и ОС.
Рассчитаем объем ОЗУ необходимый для нашей АСНИ и число блоков памяти по 16 кб=16384 байт:
Как указывалось выше
МVзсд = 5400 байт
Nц+Cрт×n0×Tсб = 26732байт
Для выбранного варианта ОС:
Vос = 5 кб = 5210 байт
Таким образом требуемый объем памяти:
Vозу = МVзсд+Vос+Nц+Cрт×n0×Tсб = 26732+5400+5210=37532 байт
Количество блоков памяти:
h= [Vозу / 16 кб]=[ 37532/ 16384]=[5,04]=3
Таким образом получим следующий состав аппаратно-программного обеспечения:
1-ый вариант УСД tусд=100 мкс
1-ой вариант ЭВМ
3-й вариант интерфейса (последовательный) tинт=100 мкс
1-й вариант алгоритма ЗСД tпо=27 мкс
1-ый вариант ОС rп(С)=1-168×10-6×С
3 блоков памяти по 16 кб h=3
Основные величины:
Срт=1748
rрт(Срт) = 0,396796
rп(Срт)=0,706336
Рассчитываются следующие величины:
t - величина средних затрат процессорного времени на однократное выполнение одной задачи. Численно равна тангенсу угла наклона отрезка прямой соединяющей РТ с началом координат.
t = rрт / Срт
Сs – производительность системы в РТ, является проекцией точки пересечения ПНХ с прямой проходящей через начало координат и РТ. Определяется как корень следующего уравнения:
tCs = rп(Cs)
Cmax - теоретический предел производительности системы. Сmax = Cs при t®0. Определяется из следующего уравнения:
rп(Cmax)=0
Приведенные затраты процессорного времени на диспетчеризацию в РТ:
rд(Cрт)=1-rп(Cрт)
По полученным данным вычерчивается график ПНХ.
РАСЧЕТ:
При t®0 Сs®Сmax:

Построим ПНХ

Рис. 10
Основные величины и выражения:
Вид ПНХ: rп(С) = 1-168×10-6×С
Суммарная частота запуска прикладных задач в РТ: Срт = 1748
Производительность системы: Сs = 2538,02
Теоретический предел производительности системы: Сmax= 5952,07
Резерв загрузки ЭВМ в РТ: Rрт = 0,1
Загрузка процессора в РТ: rрт(Срт) = 0,396
Максимальная возможная загрузка процессора в РТ: rп(Срт) = 0,706
ТОПОЛОГИЧЕСКИЙ РАСЧЕТ
Цель топологического расчета - построение топологической схемы АСНИ в монтажном пространстве. При этом необходимо решить следующие задачи:
определить топологию сети связи АСНИ;
выбрать модель трассировки линии связи;
разместить оборудование АСНИ в монтажном пространстве по критерию минимума стоимости сети связи.
Модель сети связи АСНИ можно представить в виде древовидной иерархической системы, нулевой уровень которой образуют неподвижные объекты (датчики, внешние устройства ЭВМ (МР, ПУ)), а остальные R уровней иерархии составляют объекты, положением которых можно варьировать (в данном случае это УСД, ЭВМ и разъемы на магистрали). Объекты нулевого уровня будем называть неперемещаемыми объектами (их координаты жестко заданы), а объекты остальных уровней – перемещаемыми (рис.11).
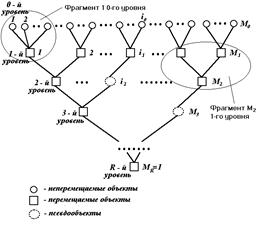
Рис. 11
В АСНИ датчики могут соединятся как непосредственное с УСД, так и через разъемы (псевдообъекты), тоже относится и к внешним устройствам (МР и ПУ) в смысле их соединения с ЭВМ. Аналогичным образом соединяются между собой УСД и ЭВМ (рис.12):
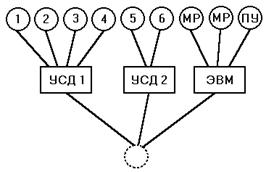
Рис. 12
Для проведения топологического расчета по критерию минимизации стоимости предлагается следующий алгоритм:
ЭТАП 1. ОПРЕДЕЛЕНИЕ ТОПОЛОГИИ СЕТИ СВЯЗИ
Выбирается структура связи между УСД и ЭВМ в зависимости от выбранного варианта интерфейса. Различают древовидную и кольцевую схемы соединений (рис.9):
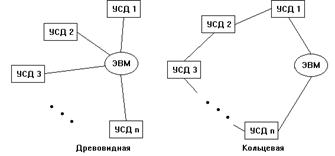
Рис. 13
В случае древовидной схемы УСД напрямую соединяются с ЭВМ, а в случае кольцевой схемы соединение между ЭВМ и УСД необходимо организовать таким образом, чтобы оно образовывало кольцо. В этом случае УСД соединяются между собой образуя звенья кольца и только два из них соединяются непосредственно с ЭВМ (см. рис 9).
Расчет оптимальных координат для древовидной и кольцевой схем аналогичны, разница только в их соединении между собой.
Для выбранного типа интерфейса АСНИ необходимо использовать кольцевую схему соединения УСД и ЭВМ.
ЭТАП 2. ВЫБОР МОДЕЛИ ТРАССИРОВКИ ЛИНИЙ СВЯЗИ
Также необходимо выбрать модель трассировки межобъектных линий связи. На практике в качестве модели трассировки наиболее часто используют ортоганальную и евклидову метрики:
![]() - ортоганальная метрика
- ортоганальная метрика
![]() - евклидова метрика
- евклидова метрика
Здесь lij - длина линии связи между i-ым и j-ым объектами.
Так как линии связи в ортоганальной метрике несомненно короче, то за модель трассировки целесообразнее принять именно ее.
Далее строится иерархическое дерево модели сети связи, где на нулевой уровень помещаются датчики, а на остальных размещаются УСД и ЭВМ, также возможно добавление фиктивных устройств (разъемов).
Приводятся графики дерева модели сети связи и размещения датчиков и устройств в монтажном пространстве.
В качестве модели трассировки линии связи примем евклидову метрику, так как она позволяет проложить более короткую линию связи, чем при евклидовой метрике.
Модель сети связи представим в виде следующей кольцевой иерархической системы (рис.14):
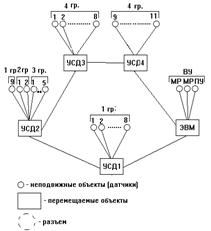
Рис.14
Диаграмма размещения датчиков и устройств в монтажном пространстве (рис.15):

Рис.15
ЭТАП 3. РАЗМЕЩЕНИЕ ОБОРУДОВАНИЯ АСНИ В МОНТАЖНОМ ПРОСТРАНСТВЕ ПО КРИТЕРИЮ МИНИМИЗАЦИИ СТОИМОСТИ СЕТИ СВЯЗИ
В нашей задаче имеется только 4уровня в иерархической модели сети связи. Для решения задачи используем следующий графический метод. Оптимизация проводится дважды: сначала минимизируется линия связи по координате X, а затем таким же образом по координате Y.
Введем понятие удельной стоимости сети связи:
Здесь x - искомая оптимальная координата объекта X, который соединен с объектами Xi координаты xi которых известны. Si - удельная стоимость линии связи от объекта X к объекту Xi. m - число объектов связанных с объектом X.
Удельная стоимость сети связи не является стоимостью как таковой, она только характеризует стоимость сети связи в зависимости от положения объектов.
Удельная стоимость записывается для каждой координаты, уровня и фрагмента отдельно. При этом верхний индекс при Q указывает на координату, первый нижний индекс на уровень, а второй нижний индекс на фрагмент (или объект).
Вначале, составляется выражение Q для 0-го уровня, что в общем виде можно записать как:

Здесь j - номер фрагмента.
В этом случае Q будет характеризовать стоимость сети связи между объектами 0-го уровня и объектами 1-го уровня. j - номер объекта на первом уровне, который связан с объектами уровня 0.
Рассмотрим координату Х (иерархическая модель сети связи приведена на рисунке 14):

Для минимизации стоимости сети связи необходимо решить задачу:

Так как в выражении для Q разность (x-xi) стоит под знаком модуля, то при определении производной необходимо следить чтобы эта разница всегда была больше 0, т.е. если значение производной определяется на промежутке где x>xi, то эта разность запишется как (x-xi), а если значение производной определяется на промежутке где x<xi, то эта разность запишется как (xi-x).
Разность (x-xi)
назовем узловой точкой с координатой xi. Для каждой Q
координатная ось X разбивается узловыми точками на ряд отрезков в каждом
из которых производная имеет постоянное значение. Такая координатная ось
изображается для всех Q 0-го уровня. На эту ось наносятся значения координат
узловых точек и значения производной в образуемых отрезках. Покажем это на
примере, но для начала рассмотрим производную ![]() и
ее график:
и
ее график:
Определим диапазон изменения производной. Примем, что x>"xi, тогда

Пусть теперь x<"xi, тогда
Т.е. диапазон изменения производной [-40; +40].

Пусть теперь x<"xi, тогда

Т.е. диапазон изменения производной [-36; +36].

Пусть теперь x<"xi, тогда
Т.е. диапазон изменения производной [-32; +32].

Пусть теперь x<"xi, тогда
Т.е. диапазон изменения производной [-12; +12].
Построим график производной. Для этого нужно найти всего по одному значению производной в каждом из отрезков, образуемых узловыми точками
![]()
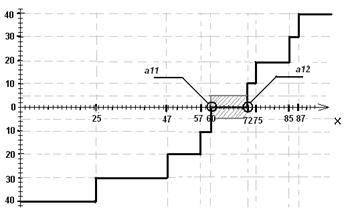
Рис. 16
Остальные графики производных строятся аналогично.
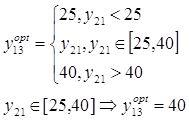
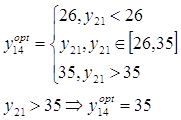
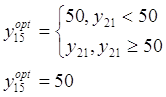
Удельная стоимость линии связи от УСД к ЭВМ (магистраль связи) накладывает ограничение на область поиска оптимальных координат. Эта удельная стоимость приводится в П4 таблица 3. Она зависит от типа выбранного интерфейса. В нашем случае она равна 5. Поэтому область поиска оптимальных координат уменьшается до диапазона изменения производной [-5; +5]. Таким образом область поиска координаты X для УСД1 равна (60; 72) (заштрихованная область на рис. 16).
a11 и a12 - оконечные точки области поиска оптимальных координат.
Уточним, что в нашем примере Q01 характеризует связь УСД1 с датчиками 1-ой группы, Q02 - связь УСД2 с датчиками 1-ой, 2-ой и 3-ей групп, Q03 – связь УСД3 с датчиками 4-ой группы, Q04 -связ УСД4 с датчиками 4-ой группы, Q05 - связь ЭВМ с двумя МР и одним ПУ.
Приведем диаграмму координатных осей, о которых говорилось выше, для Q01x, Q02x, Q03x ,Q04x ,Q05x (рис.17).
Под этими координатными осями располагаются координатные оси для Q11, Q12, Q13, Q14, Q15, которые характеризуют те же связи УСД с датчиками и ЭВМ с ВУ, что и Q уровня 0, но с учетом ограничений накладываемых на область поиска стоимостью магистрали. На этих координатных осях размечаются только те узловые точки, которые принадлежат области поиска. Значения производной копируются с уровня 0, за исключением того, что за областью поиска значение производной принимается равным удельной стоимости магистрали. В нашем случае этими значениями будут +5 и -5.
Под этими линиями располагается еще одна линия для Q21, которая характеризует стоимость связи между объектами 1-го и 2-го уровня. В нашем случае это будет связь УСД1, УСД2,УСД3,УСД4 и ЭВМ. На эту линию переносятся все узловые точки с линий Q11х, Q12х, Q13х, Q14x ,Q15x , а значения производной от Q21х в получившихся отрезках образуется как сумма значений производных в соответствующих отрезках на линиях Q11, Q12, Q13 , Q14, Q15
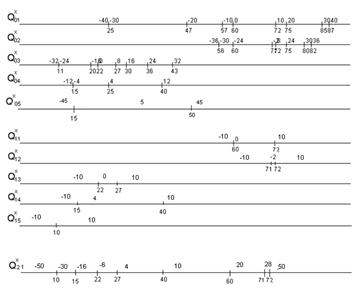
Рис.17
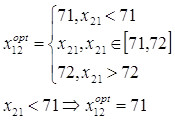
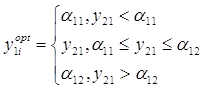
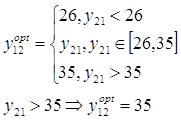
В первую очередь определяется координата единственного объекта на самом нижнем уровне иерархии. В качестве значения координаты выбирается любое значение из отрезка, где производная ближе всего к 0 (чаще это концевые точки такого отрезка). В нашем случае это будет координата разъема, примем ее равной: x21=27. Остальные координаты (всех объектов уровня 1) определяются по правилу:
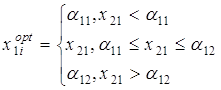
Где a11 и a12 - оконечные точки области поиска оптимальных координат для соответствующих Q1i. Определим оптимальные координаты для УСД1, УСД2, УСД3,УСД4 и ЭВМ:
УСД1

УСД2
УСД3
УСД4
ЭВМ
Рассмотрим координату У

Определим диапазон изменения производной. Примем, что у>"уi, тогда

Т.е. диапазон изменения производной [-40; +40].

Пусть теперь у<"уi, тогда
Т.е. диапазон изменения производной [-36; +36].

Пусть теперь x<"xi, тогда
Т.е. диапазон изменения производной [-32; +32].
Пусть теперь x<"xi, тогда
Построим график производной. Для этого нужно найти всего по одному значению производной в каждом из отрезков, образуемых узловыми точками.
![]()
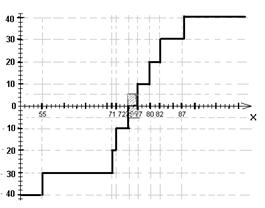
Рис.18
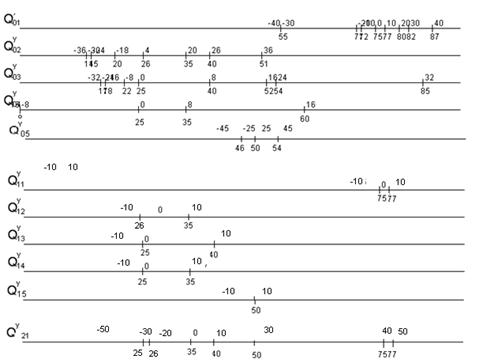
Рис.19
В первую очередь определяется координата единственного объекта на самом нижнем уровне иерархии. В качестве значения координаты выбирается любое значение из отрезка, где производная ближе всего к 0 (чаще это концевые точки такого отрезка). В нашем случае это будет координата разъема, примем ее равной: y21=40.
Остальные координаты (всех объектов уровня 1) определяются по правилу:
Где a11 и a12 - оконечные точки области поиска оптимальных координат для соответствующих Q1i.
Определим оптимальные координаты УСД1, УСД2, УСД3,УСД4 и ЭВМ:
УСД1

УСД2
УСД3
УСД4
ЭВМ
После того как найдены оптимальные координаты и по оси X и по оси Y для всех объектов АСНИ, данные о них сводятся в таблицу 11:
Таблица 11
| X | Y | |
| УСД1 | 60 | 75 |
| УСД2 | 71 | 35 |
| УСД3 | 27 | 40 |
| УСД4 | 27 | 35 |
| ЭВМ | 27 | 50 |
ЭТАП 4. РАСЧЕТ СТОИМОСТИ СЕТИ СВЯЗИ
Приводится ортоганальный план размещения АСНИ в монтажном пространстве:
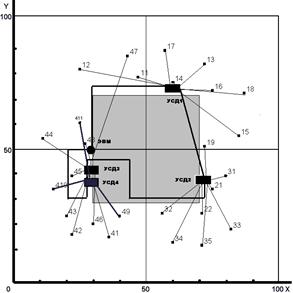
Рис.20
В соответствии с выбранной метрикой рассчитывается длина магистрали lмаг., проверяется: является ли она допустимой для выбранного интерфейса. Рассчитывается стоимость магистрали Qмаг..
В нашем примере выбран интерфейс с кольцевой магистралью и соединение между устройствами следующее: УСД1-УСД2-УСД3- УСД4-ЭВМ- УСД1 (см. рис.25). Расчет длины магистрали выполняется следующим образом:

Для нашего интерфейса длина магистрали не должна превышать 150 м, проверим это условие:
lмаг.=149,36 м > 150 м
Т.е. данное условие выполняется.
Рассчитаем стоимость магистрали:
Qмаг.=5*149,36=746,8руб.
Qсовм=2087,935 руб
Рассчитывается длина линии связи между датчиками и УСД, а также между ВУ и ЭВМ, и ее стоимость Qл.св
Совместим расчет длины линии связи и ее стоимости в одном выражении:
Вычисляется конечная стоимость сети связи в АСНИ:
Qсети=Qмаг.+Qл.св. [руб]
![]()
АНАЛИЗ РЕЗУЛЬТАТОВ И ОЦЕНКА ПОКАЗАТЕЛЕЙ ЭФФЕКТИВНОСТИ АСНИ
Указывается перечень аппаратных и программных средств оптимальной АСНИ и стоимость последней:
Qs=Qусд+Qэвм+Qбп+Qос+Qсети
Здесь Qусд - стоимость всех УСД в АСНИ;
Qэвм, Qбп - стоимость ЭВМ и блоков оперативной памяти соответственно;
Qос - стоимость операционной системы;
Qсети - стоимость сети связи.
Перечень аппаратно-программного обеспечения:
1-й вариант УСД tусд=100 мкс
1-й вариант ЭВМ
3-й вариант интерфейса (последовательный) tинт=100 мкс
1-й вариант алгоритма ЗСД tпо=5,4545 мкс
1-ой вариант ОС rп(С)=,706336
3 блоков памяти по 16 кб
Расчет стоимости АСНИ:
Qусд=4*500=2000 у.е.
Qэвм=8×103=8000 у.е.
Qозу=103×h=103×3 =3000 у.е.
Qос=1000 у.е. (с настройкой)
Qсети=2087,935+746,8=2834,735 у.е.
Таким образом, стоимость АСНИ:
Qs=2000+8000+3000+1000+2834,735 =16834,735 у.е.
Параметры временной диаграммы работы АСНИ на этапе сбора данных сводятся в Таблицу 12
Таблица 12
| Параметры временной диаграммы | |||||
| № задачи | Параметры циклограммы | Частота вызова, Гц | Избыточность по загрузке | ||
| I |
ri |
ji |
foi |
fi |
Dri=t(fi-foi) |
| 11 | 32 | 3 | 44,9428 | 44,9428 | 0 |
| 12 | 32 | 4 | 44,9428 | 44,9428 | 0 |
| 13 | 32 | 7 | 44,9428 | 44,9428 | 0 |
| 14 | 32 | 8 | 44,9428 | 44,9428 | 0 |
| 15 | 32 | 11 | 44,9428 | 44,9428 | 0 |
| 16 | 32 | 12 | 44,9428 | 44,9428 | 0 |
| 17 | 32 | 15 | 44,9428 | 44,9428 | 0 |
| 18 | 32 | 16 | 44,9428 | 44,9428 | 0 |
| 19 | 32 | 19 | 44,9428 | 44,9428 | 0 |
| 21 | 4 | 1 | 13,26425 | 719,0860 | 0,159897 |
| 22 | 4 | 2 | 13,26425 | 719,0860 | 0,159897 |
| 31 | 128 | 20 | 611,45 | 22,44144 | -0,13343 |
| 32 | 128 | 23 | 611,45 | 22,44144 | -0,13343 |
| 33 | 128 | 24 | 611,45 | 22,44144 | -0,13343 |
| 34 | 128 | 27 | 611,45 | 22,44144 | -0,13343 |
| 35 | 128 | 28 | 611,45 | 22,44144 | -0,13343 |
| 41 | 512 | 31 | 3,415579 | 5,61786 | 0,000499 |
| 42 | 512 | 32 | 3,415579 | 5,61786 | 0,000499 |
| 43 | 512 | 52 | 3,415579 | 5,61786 | 0,000499 |
| 44 | 512 | 55 | 3,415579 | 5,61786 | 0,000499 |
| 45 | 512 | 56 | 3,415579 | 5,61786 | 0,000499 |
| 46 | 512 | 59 | 3,415579 | 5,61786 | 0,000499 |
| 47 | 512 | 60 | 3,415579 | 5,61786 | 0,000499 |
| 48 | 512 | 63 | 3,415579 | 5,61786 | 0,000499 |
| 49 | 512 | 64 | 3,415579 | 5,61786 | 0,000499 |
| 410 | 512 | 68 | 3,415579 | 5,61786 | 0,000499 |
| 411 | 512 | 71 | 3,415579 | 5,61786 | 0,000499 |
Параметр Dr характеризует избыточную загрузку процессора выполнением i-ой задачи в следствии запуска последней с избыточной частотой fi.
Избыточная загрузка зависит от качества заполнения циклограммы, которое оценивается показателем:
Кц=r0 / rрт
Здесь ![]() - нижний теоретический
предел загрузки процессора в РТ.
- нижний теоретический
предел загрузки процессора в РТ.
Информационная избыточность, вносимая при работе по временной диаграмме, оценивается коэффициентом:
Здесь  - суммарная частота
запуска прикладных задач на этапе сбора данных.
- суммарная частота
запуска прикладных задач на этапе сбора данных.
Производительность АСНИ в РТ вычисляется по формуле:

Резерв АСНИ по нагрузке в рабочей точке на этапе сбора данных:
 ,
,
где Сs – производительность системы в РТ.
Информационная производительность АСНИ в РТ на этапе сбора данных (скорость записи информации в ОЗУ) не превышает величины:
Bs=8n0C / Kсж [бит/сек]
Здесь n0 - коэффициент определяемый по формуле n0=[nацп / 8], где = []–значение выражения в скобках, дополненное до большего целого;
Ксж - средний коэффициент сжатия данных в системе (с учетом датирования).
Объем оперативной памяти, требуемый для регистрации измерительной информации на этапе сбора данных, равен:
Vозу=BsTсб / 8 [байт]
Информационная избыточность, вносимая при записи данных в ОЗУ, оценивается коэффициентом:
hд= 8n0 / nацп - 1
Информационная избыточность АСНИ в целом равна:
hs=(hусд+1)( hвд+1)( hд+1)-1
Стоимостной дисбаланс АСНИ характеризует асимметрию загрузки системы и рассчитывается по следующей формуле:
Здесь Qi - стоимость i-ой компоненты АСНИ; ri - загрузка (или коэффициент использования) i-ой компоненты. Компонентами АСНИ являются УСД, ЭВМ, блоки памяти, сеть связи, ОС. Их стоимости соответственно: Qусд, Qэвм, Qбп, Qсети, Qос. Загрузка компонент:
rусд = Срт / Сусд
rэвм = Срт / Сs
rбп = h без приведения к большему целому [h]
rсети = Кз.ц.
rос = 1
r0=С0×(tпо+tинт+tусд)=1731,291 ×(27×10-6+100×10-6+100×10-6)=0,3930
rрт = 0,3967
Кц = r0/rрт = 0,3930 / 0,3967=0,99
С =![]() 44,94288×9+719,08608×2+22,4×5+5,62×11=2016,64
44,94288×9+719,08608×2+22,4×5+5,62×11=2016,64
С0 = 1731,291
hвд = (С - С0) / С0 =(2016,64-1731,291) / 1731,291 = 0,1648
![]() rрт / С = 0,3967/2016,64= ,000196 сек =
196 мксек
rрт / С = 0,3967/2016,64= ,000196 сек =
196 мксек
Что при длительности такта:
t0 = 1 / f0 = 1 / 2016,64 =495 мксек
составляет более половины процессорного времени, затрачиваемого на выполнение полезной работы.
Сs = 2538,07
Rs = Cs / C - 1 = 2538,07/2016,64 - 1 = 0,2585
n0 = 1, Kсж = 1
Bs = 8×n0×С / Ксж = 8×1×2016,64 / 1 = 16133,12 бит/сек
Тсб = 15 сек
Vозу = Bs×Тсб / 8 = 16133,12×15/8=30249,6 байт
nацп = 6
hд = 8n0 / nацп - 1 = 8*1 / 6 -1 = 0,33
rусд = Срт / Сусд = 1748/ 10×103 = 0,1748
rэвм = Срт / Сs = 1748/ 2538,07 = 0,6887
rбп = 42358 / 43000 = 0,985069
rсети = 359/ 512= 0,81179
rос = 1
hs = (hусд +1)( hвд +1)( hд +1) - 1 = (0,1748+1)(0,1648+1)(0,33 +1) - 1 = 0,8199
DQ=
![]()
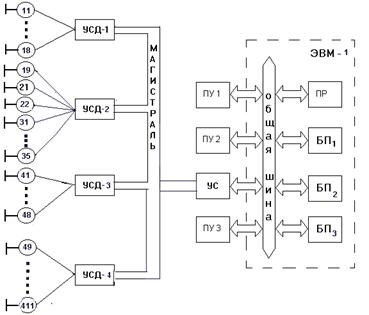
Рис.21
УСД - устройство сбора данных;
УС - устройство сопряжения;
ПУ – периферийное устройство;
ПР - процессор;
БП - блок памяти.
Перечень аппаратно-программного обеспечения с калькуляцией стоимости АСНИ:
Таблица 13
| Тип и параметры устройства | Стоимость в условных единицах |
|
1-й вариант УСД tусд=100 мкс |
2000 |
| 1-й вариант ЭВМ |
8×103 |
|
3-й вариант интерфейса (последовательный) tинт=100 мкс |
2834,735 |
|
1-й вариант алгоритма ЗСД tпо=27 мкс |
|
|
1-ой вариант ОС rп(С)=0,706336 |
1000 |
| 3 блоков памяти по 16 кб | 3000 |
| Суммарная стоимость КТС АСНИ и ПО | 16834,735 |
ЛИТЕРАТУРА
1. В. А. Виттих, В. А. Цыбатов. Оптимизация бортовых систем сбора и обработки данных. М. изд-во Наука. 1985г.
2. О.П.Валов. Автоматизация сбора и первичной обработки информации. Учебное пособие по дисциплине «Системы реального времени» для студентов спец. 230102(2202).РИО.КГТУ.2002
3. Е.С.Вентцель. Элементы динамического программирования. М. изд-во Наука. 1964г