Реферат: Методы предварительных эквивалентных преобразований и итерационные методы с минимизацией невязки для решения СЛАУ
Реферат «Введение в численные методы»
Тема: «Методы предварительных эквивалентных преобразований и итерационные методы с минимизацией невязки для решения СЛАУ»
1. Методы предварительных эквивалентных преобразований
1.1 Преобразование вращения
Следующий важный подход к решению алгебраических систем уравнений базируется на применении эквивалентных преобразований с помощью унитарных матриц, сводящем исходную матрицу к эквивалентной ей диагональной.
Смысл этого подхода состоит в том, чтобы последовательно, умножением слева и / или справа на специальные унитарные матрицы, превратить некоторые компоненты исходной матрицы в нуль.
Матрица S называется унитарной, если ее произведение со своей комплексно сопряженной равно единичной матрице. Это означает, что комплексно сопряженная матрица равна обратной матрице:
![]()
Известной унитарной
матрицей является матрица вращения, которая применяется для
поворота на заданный угол вектора, принадлежащего некоторой плоскости, вокруг
начала координат. В двумерном случае вектор ![]() поворачивается
на угол
поворачивается
на угол ![]() путем умножения на матрицу
путем умножения на матрицу
![]()
Чтобы сохранить
эквивалентность результирующей матрицы при умножении ее на матрицу вращения,
необходимо исходную матрицу умножать справа на ![]() и
слева на
и
слева на ![]() . Умножение же матрицы
вращения на вектор дает такой же по величине вектор, но повернутый на заданный
угол.
. Умножение же матрицы
вращения на вектор дает такой же по величине вектор, но повернутый на заданный
угол.
Поворот вектора в многомерном пространстве на произвольный угол можно представить, как последовательность плоских вращений каждой проекции на некоторый угол. Если подобрать угол вращения так, чтобы в плоском повороте одну из проекций вектора совместить с координатной осью, то вторая проекция в этой плоскости становится равной нулю.
Частные повороты вектора
в многомерном пространстве с помощью матрицы вращения можно выполнять, если ее
расширить до матрицы размера ![]() следующим
образом:
следующим
образом:
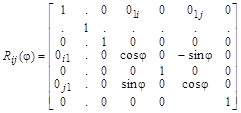 .
.
Индексы i, j обозначают
матрицу вращения, поворачивающую вектор в плоскости ![]() на
угол
на
угол ![]() .
.
Теперь частное
эквивалентное преобразование матрицы A вращением на угол ![]() записываются так:
записываются так:
![]() .
.
Условие превращения в нуль ij-тых элементов симметричной матрицы A можно получить методом неопределенных коэффициентов на двумерной матрице:
![]() .
.
![]() .
.
Угол поворота, при
котором ![]() , находится из уравнения
, находится из уравнения
![]() .
.
Разделив на ![]() и обозначив
и обозначив ![]() ,
, ![]() , получим квадратное
уравнение для тангенса требуемого угла поворота
, получим квадратное
уравнение для тангенса требуемого угла поворота
![]() .
.
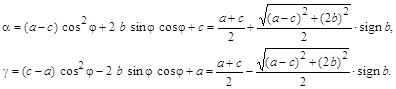
Из двух решений для
тангенса выбирается такое, чтобы ![]() . В этом
случае
. В этом
случае ![]() . Подставив выражение для
угла в соотношения для диагональных элементов, после тригонометрических
преобразований получаются следующие формулы:
. Подставив выражение для
угла в соотношения для диагональных элементов, после тригонометрических
преобразований получаются следующие формулы:
Для получения
результирующей матрицы выполнять матричное умножение трех матриц совсем
необязательно. Структура матриц вращения вызывает при умножениях изменение
только тех элементов исходной матрицы, которые находятся на i-той и j-той
строчках и на i-том и j-том столбцах. Изменения представляются
суммами элементов, стоящих в строчках и столбцах, умноженных на синус или
косинус угла ![]() в соответствии с
формулами, где j>i:
в соответствии с
формулами, где j>i:
преобразования строк – 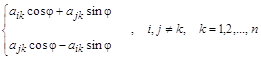 ;
;
преобразование столбцов –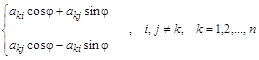 .
.
На пересечениях i-й
строки и i-того столбца и j-й строки и j-того столбца
располагаются соответственно вычисленные выше ![]() и
и
![]() , а на местах ij-того
и ji-того элементов вставляются нули.
, а на местах ij-того
и ji-того элементов вставляются нули.
Для приведения к
диагональной матрице необходимо выполнить ![]() таких
элементарных преобразований.
таких
элементарных преобразований.
1.2 Ортогональные преобразования отражением
Следующей важной унитарной матрицей, с помощью которой в различных алгоритмах выполняются ортогональные преобразования, являются матрицы отражения. Использование этого инструмента позволяет, например, последовательными эквивалентными преобразова-ниями свести исходную матрицу к верхней треугольной (QR-алгоритмы), трех или двух диагональным и т.д.
Смысл этого подхода
состоит в том, чтобы умножением матрицы A слева на специально
подобранную унитарную матрицу ![]() один
из столбцов исходной матрицы (например,
один
из столбцов исходной матрицы (например, ![]() )
преобразовать в вектор, параллельный единичному координатному вектору
)
преобразовать в вектор, параллельный единичному координатному вектору ![]() (
(![]() или
или ![]() ). Тогда, последовательно
подбирая нужные унитарные матрицы
). Тогда, последовательно
подбирая нужные унитарные матрицы ![]() и
соответствующие единичные векторы
и
соответствующие единичные векторы ![]() , после n
циклов эквивалентных преобразований можно будет получить верхнюю
треугольную матрицу:
, после n
циклов эквивалентных преобразований можно будет получить верхнюю
треугольную матрицу:
При выборе в качестве
начального вектора ![]() и умножениях
матрицы A на ортогональные матрицы справа в конечном счете можно
получить нижнюю треугольную матрицу.
и умножениях
матрицы A на ортогональные матрицы справа в конечном счете можно
получить нижнюю треугольную матрицу.
Весь вопрос состоит в
том, как формировать унитарную матрицу с заданными свойствами из векторов ![]() и столбцов
и столбцов ![]() матрицы A.
матрицы A.
Из аналитической геометрии известно, что любые векторы, лежащие в плоскости, взаимно перпендикулярны с ее нормалью, т.е. их проекции на нормаль равны нулю. Последнее эквивалентно равенству нулю скалярных произведений.
Чтобы (k+1) –
мерный векторный треугольник ![]() сделать
параллельным k-мерной гиперплоскости с нормалью n (вектор
единичной длины, перпендикулярный плоскости), необходимо приравнять нулю
скалярное произведение: (n, y)=0.
сделать
параллельным k-мерной гиперплоскости с нормалью n (вектор
единичной длины, перпендикулярный плоскости), необходимо приравнять нулю
скалярное произведение: (n, y)=0.
Пусть вектор z не
параллелен плоскости, заданной своей нормалью, тогда его проекции на эту
плоскость и нормаль соответственно будут представлены векторами ![]() и
и ![]() . Вектор z и
вектор зеркально-симметричный ему
. Вектор z и
вектор зеркально-симметричный ему ![]() через
эти проекции можно выразить так:
через
эти проекции можно выразить так:
![]()
Разрешив первое
относительно ![]() и подставив его в
и подставив его в ![]() , получим
, получим
![]()
Проекцию вектора ![]() можно заменить скалярным
произведением (n, z) и подставить в выражение для
можно заменить скалярным
произведением (n, z) и подставить в выражение для ![]() , выразив тем самым
зеркально отраженный вектор через исходный вектор и нормаль гиперплоскости:
, выразив тем самым
зеркально отраженный вектор через исходный вектор и нормаль гиперплоскости:
![]()
Здесь M представляет унитарную матрицу, преобразующую произвольный вектор в зеркально отраженный. В том, что матрица унитарная, нетрудно убедиться, проверив ее произведение со своей комплексно сопряженной:
![]()
Выражение для зеркально отраженного вектора позволяет представить нормальный вектор в виде линейной функции от задаваемого вектора z:
![]()
Число ![]() в знаменателе является
нормирующим множителем. Нормальный вектор представляющий гиперплоскость обязан
иметь единичную длину. Коэффициент
в знаменателе является
нормирующим множителем. Нормальный вектор представляющий гиперплоскость обязан
иметь единичную длину. Коэффициент ![]() ,
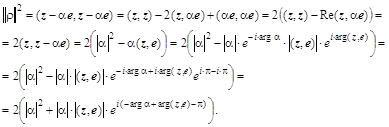
который в общем случае является комплексным числом, необходимо выбрать так,
чтобы скалярное произведение
,
который в общем случае является комплексным числом, необходимо выбрать так,
чтобы скалярное произведение ![]() было
больше нуля. Если учесть соотношение для согласованных норм:
было
больше нуля. Если учесть соотношение для согласованных норм: ![]() , то
, то
Выбрав ![]() для комплексных матриц или
для комплексных матриц или
![]() – для действительных
матриц, будем иметь
– для действительных
матриц, будем иметь
![]()
Такое нормирование не нарушает коллинеарности отраженного и единичного векторов:
![]()
![]()
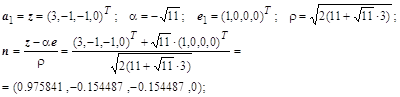
Рассмотрим пример воздействия ортогонального преобразования на матрицу
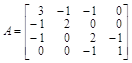 .
.
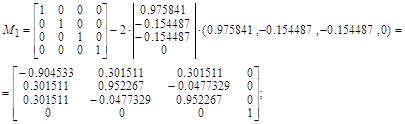

Приведенная методика получения унитарных (и ортогональных в частности) матриц используется во многих стандартных алгоритмах в качестве инструмента частичного преобразования исходных матриц к двух или трех диагональным, для которых в дальнейшем применяются рекуррентные формулы получения решения уравнений, называемые в литературе методом прогонки для систем с ленточными матрицами.
2. Итерационные методы с минимизацией невязки
2.1 Ускорение сходимости итерационных методов
Точные методы получения решений, использующие рассмотренные эквивалентные преобразования полностью заполненной матрицы, требуют выполнения числа операций, пропорционального кубу размерности системы, и свободной памяти для хранения исходных и промежуточных значений – пропорциональной квадрату размера матрицы. Поэтому для сверх больших систем (число неизвестных больше нескольких сотен) ориентируются в основном на применение приближенных, итерационных методов.
Привлекательность тех или иных итерационных методов определяется скоростью сходимости итерационного процесса. Теоретически доказано, что итерационный процесс Гаусса-Зейделя сходится к решению при любом начальном значении искомого значения вектора решений, однако количество итерационных циклов может во много раз превышать число неизвестных (размерность матрицы). Это вызвало к жизни множество модификаций алгоритмов, обладающих большей скоростью сходимости.
Процедуры ускорения
связаны с построением очередного вектора по одному или нескольким его значениям
на предыдущих итерационных циклах. Фактически речь идет о построении на каждом
шаге итераций интерполирующей функции с векторным аргументом, по которой
вычисляют очередной вектор для подстановки. Для вычисления вектора ![]() на (k+1) – ом
шаге итераций необходимо сначала получить величину
на (k+1) – ом
шаге итераций необходимо сначала получить величину ![]() и
единичный вектор направления
и
единичный вектор направления ![]() и
просуммировать предыдущий вектор
и
просуммировать предыдущий вектор ![]() с
добавочным вектором:
с
добавочным вектором:
![]() .
.
Подстановка последнего в
уравнение (![]() ) образует вектор
) образует вектор ![]() из покомпонентных невязок.
Для задания структурной взаимосвязи каждой невязки с соответствующей
компонентой вектора
из покомпонентных невязок.
Для задания структурной взаимосвязи каждой невязки с соответствующей
компонентой вектора ![]() и образования
функционала (скалярной функции от вектора невязок) возмем скалярное
произведение вектора невязки на вектор-строку
и образования
функционала (скалярной функции от вектора невязок) возмем скалярное
произведение вектора невязки на вектор-строку ![]() :
:
![]() .
.
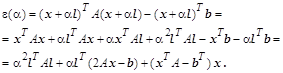
После подстановки очередного
вектора функционал получит новое значение, которое будет зависеть от некоторого
скаляра ![]() :
:
![]() .
.
Чтобы невязки на каждом
шаге итераций становились меньше, желательно соответствующим образом выбирать ![]() . Найдем такое значение
. Найдем такое значение ![]() , при котором
, при котором ![]() . Для этого приравняем
производную по
. Для этого приравняем
производную по ![]() нулю. Индекс
номера итерации пока опустим.
нулю. Индекс
номера итерации пока опустим.

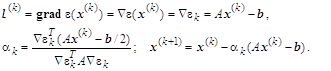
Из последнего равенства
для (k+1) – й итерации величина шага ![]() в
направлении вектора
в
направлении вектора ![]() должна
быть вычислена так:
должна
быть вычислена так:
![]() .
.
Если единичные векторы
направления последовательно выбирать равными координатным, т.е. ![]() , то будет реализован метод
Гаусса-Зейделя (метод покоординатного спуска в задачах оптимизации).
, то будет реализован метод
Гаусса-Зейделя (метод покоординатного спуска в задачах оптимизации).
Выбирая направление изменения очередного вектора в сторону локального убывания, т.е. в сторону, противоположную вектору градиента функционала, получается метод быстрого спуска. В этом случае
2.2 Метод сопряженных направлений
Среди методов, связанных
с выбором направления существуют методы, в которых к векторам направлений предъявляются
требования их взаимной сопряженности ![]() , т.е.
матрица A преобразует вектор
, т.е.
матрица A преобразует вектор ![]() в вектор,
ортогональный вектору
в вектор,
ортогональный вектору ![]() . Доказано, что
выбор направлений из множества сопряженных позволяет при любом начальном
. Доказано, что
выбор направлений из множества сопряженных позволяет при любом начальном ![]() свести задачу к точному
решению не более, чем за n шагов, если матрица симметричная и
положительно определенная (
свести задачу к точному
решению не более, чем за n шагов, если матрица симметричная и
положительно определенная (![]() )
размера
)
размера ![]() .
.
Классическим набором
сопряженных векторов являются собственные векторы матрицы (![]() ). Однако задача их
определения сложнее решения заданной системы уравнений. Не менее сложна и
задача построения произвольной системы ортогональных векторов.
). Однако задача их
определения сложнее решения заданной системы уравнений. Не менее сложна и
задача построения произвольной системы ортогональных векторов.
В то же время примером
ортогональных направлений являются направления вектора градиента и нормали в
заданной точке некоторой гиперповерхности. Такая поверхность выше была
представлена функционалом в виде скалярного произведения вектора невязки и
вектора x, которая и определяла направление спуска по направлению
градиента. Если, используя такой же подход к вычислению ![]() , в выражении для
последнего вектор невязок дополнительно модифицировать, как показано ниже, то
рекуррентно вычисляемые очередные направления окажутся сопряженными:
, в выражении для
последнего вектор невязок дополнительно модифицировать, как показано ниже, то
рекуррентно вычисляемые очередные направления окажутся сопряженными:
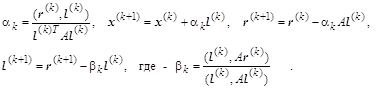
Выбрав в начале итераций ![]() и
и ![]() , после выполнения
приведенных вычислений в (n-1) цикле будут получены векторы направлений,
удовлетворяющие соотношениям
, после выполнения
приведенных вычислений в (n-1) цикле будут получены векторы направлений,
удовлетворяющие соотношениям
![]() ,
,
а векторы невязок будут ортогональными:
![]() .
.
Относительно метода
сопряженных градиентов доказывается, что, если матрица (положительно
определенная и симметричная) имеет только m (m<n) различных
собственных значений, то итерационный процесс сходится не более, чем за m
итераций. Однако в практической реализации скорость сходимости существенно зависит
от величины меры обусловленности ![]() и в
итерационном процессе может быть оценена согласно неравенству:
и в
итерационном процессе может быть оценена согласно неравенству:
![]() ,
,
где ![]() – коэффициент, степень
которого на каждом шаге итерационного процесса показывает во сколько раз
уменьшилось расстояние до вектора точного решения x*.
– коэффициент, степень
которого на каждом шаге итерационного процесса показывает во сколько раз
уменьшилось расстояние до вектора точного решения x*.
Чем больше ![]() , тем ближе a к
единице и, следовательно, степени a уменьшаются медленнее. В литературе
описываются модифицированные методы сопряженных градиентов, которые тем или
иным способом включают в итерационный процесс подобные (конгруэнтные – для
комплексных матриц) преобразования, предварительно уменьшающие меру
обусловленности.
, тем ближе a к
единице и, следовательно, степени a уменьшаются медленнее. В литературе
описываются модифицированные методы сопряженных градиентов, которые тем или
иным способом включают в итерационный процесс подобные (конгруэнтные – для
комплексных матриц) преобразования, предварительно уменьшающие меру
обусловленности.
Литература
1. Бахвалов И.В. Численные методы. БИНОМ, 2008. – 636c.
2. Волков Е.А. Численные методы. Изд-во ЛАНЬ, 2004. – 256.
3. Демидович Б.П., ред., Марон И.А., Шувалова Э.З. Численные методы анализа. Издательство ЛАНЬ, 2008.
4. Пантелеев А.В., Киреев В.И., Пантелеев В.И., Киреев А.В. Численные методы в примерах и задачах. М: Высшая школа, 2004. – 480c.
5. Пирумов У.Г., Пирумов О.Г. Численные методы. Изд-во: ДРОФА, 2004. – 224c.