Дипломная работа: Диагностика отказов системы регулирования уровня в баке
Федеральное агентство по образованию
ЮЖНО-УРАЛЬСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
Факультет Приборостроительный
Кафедра Автоматика и управление
ПРОЕКТ ПРОВЕРЕН ДОПУСТИТЬ К ЗАЩИТЕ
Рецензент Заведующий кафедрой
____________________________ ___________________________
“_____” _____________ 2007__ г. “ _____ “ ____________ 2007__ г.
Диагностика отказов системы регулирования уровня в баке
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА К ДИПЛОМНОМУ ПРОЕКТУ
ЮУрГУ-Д.220200 068.000.ПЗ
Консультанты: Руководитель проекта:
______________________________ ______________________________
______________________________ ______________________________
“ _____ “ ______________ 2007 _ г. Автор проекта
студент группы ПС-269м.
______________________________
______________________________ Иванов А.А. .
“ ____ “ ________________ 2007 _ г.
______________________________ Нормоконтролер
______________________________ ______________________________
“ ____ “ ________________ 2007 _ г. “ _____ “ ______________ 2007 __ г.
“ ____ “ ________________ 2007 _ г.
Челябинск - 2007 г.
Содержание
Введение
1. Обзор литературы и постановка задачи
2. Описание метода диагностики отказов
2.1. Основные понятия метода
2.2. Диагностика отказов, основанная на принципе аналитической избыточности
2.3. Основные принципы диагностики отказов, основанной на использовании моделей
2.3.1. Метод диагностики отказов, основанный на использовании моделей
2.3.2. Диагностика отказов при работе системы
2.3.3. Моделирование систем с отказами
2.3.4. Общая структура формирования рассогласования в диагностике отказов, основанной на моделях
2.3.5. Выявляемость отказов
2.3.6. Изолируемость отказов
2.3.6.1. Структурирование рассогласований
2.3.6.2. Фиксирование направления вектора рассогласования
2.3.6.3. Изоляция отказов датчиков и исполнительных механизмов
2.3.7 Техники формирования рассогласования
2.3.7.1. Методы, основанные на использовании наблюдателей
2.3.7.2. Методы, основанные на оценке параметров
2.3.8. Формирование рассогласований на основе наблюдателей состояния
2.3.9. Формирование рассогласований не чувствительных к ошибкам линеаризации и взомущениям
2.4. Наблюдатели при неизвестном входе
2.4.1. Проектирование наблюдателей при неизвестном входе
2.4.2. Схемы надежных выявления и изоляции отказов, основанные на наблюдателях при неизвестном входе
2.4.2.1. Схемы надежного выявления отказов, основанные на наблюдателях при неизвестном входе
2.4.2.2. Схемы надежной изоляции отказов датчиков
2.4.2.3. Схема надежной изоляции отказов исполнительных механизмов
2.5. Нейронные сети в диагностике отказов
3. Диагностика отказов системы регулирования уровня жидкости в баке
3.1. Постановка задачи
3.2. Моделирование элементов системы и отказов
3.2.1. Модель объекта управления
3.2.2. Модель исполнительного механизма
3.2.3. Моделирование датчиков
3.2.4. Моделирование регулятора
3.2.5. Моделирование отказов
3.3. Проектирование системы диагностики отказов
3.3.1. Описание системы с отказами
3.3.2. Моделирование отказов в Vissime
3.3.3. Диагностика отказов с помощью наблюдателей состояния
3.3.3.1. Выявление отказов
3.3.3.2. Изоляция отказов
3.4. Диагностика отказов с помощью наблюдателей при неизвестном входе
3.4.1. Выявление отказов
3.4.2. Изоляция отказов
3.5. Основные выводы и результаты
4. Безопасность жизнедеятельности
4.1. Анализ опасных и вредных производственных факторов
4.2. Мероприятия по производственной санитарии
4.2.1. Требования к ПЭВМ
4.2.2. Требования к помещениям для работы с ПЭВМ
4.2.3. Микроклимат на рабочих местах, оборудованных ПЭВМ
4.2.4. Шум на рабочих местах, оборудованных ПЭВМ
4.2.5. Освещение
4.2.6. Уровень электромагнитных излучений
4.3. Эргономика и производственная эстетика
4.4. Электробезопасность рабочих мест
4.5. Пожарная безопасность
5. Организационно – экономический раздел
5.1. Постановка задачи
5.2. Сетевое планирование дипломной работы
5.2.1 Расчет ожидаемой продолжительности выполнения работ
5.2.2. Расчет параметров событий сетевого графика
5.2.3.Расчет параметров работ сетевого графика
5.3. Расчет стоимостных параметров сетевого графика
5.3.1. Расчет трудоемкости работ
5.3.2. Расчет сметной стоимости работ
Заключение
Литература
Приложение
Введение
Системы автоматического управления стали неотъемлемой частью технического оснащения современного производства, обеспечивая повышение качества продукции и улучшение экономических показателей производства. Системы управления становятся все более и более сложными, так же как и алгоритмы управления что, приводит к повышению требований к надежности и безопасности управления.
Эти задачи наиболее важны в системах с особыми требованиями к обеспечению безопасности, таких как ядерные реакторы, химические предприятия и воздушный транспорт. Для таких систем отказы могут привести человеческим смертям, катастрофическому загрязнению окружающей среды и значительному материальному ущербу. Поэтому, возрастает необходимость в наблюдении в режиме реального времени и диагностике отказов для увеличения надежности таких систем. Ранее выявление отказов позволяет предотвратить дальнейшее его развитие и, следовательно, возникновение более существенных повреждений, неполадок, последствия которых могут быть даже катастрофическими.
В данной работе диагностика отказов будет рассматриваться применительно к радиохимическому производству.
1. Обзор литературы и постановка задачи
Задачей данной работы является разработка (исследование) методики диагностики отказов элементов системы управления для радиохимического производства. В работе, в качестве типового объекта автоматизации, рассматривается процесс жидкостной экстракции, используемый при переработке облученного ядерного горючего.
Описание объекта управления
Технологический цикл переработки облученного ядерного горючего можно разбить на определенное число операций, применяемых в любой схеме переработки независимо от технологического решения: подготовка отработанных ядерных отходов к переработке, разделение, приготовление товарного продукта, товарный продукт, обработка отходов, получение ценных изотопов и захоронение.
Основная операция при переработке облученного ядерного горючего – разделение (целевых продуктов и примесей, целевых продуктов между собой и т.д.). Она стоит из основных процессов – собственно процессов разделения и вспомогательных – окисления, восстановления, концентрирования и т.д. Все процессы разделения в радиохимии основаны на очень тонком различии в свойствах и поведении соединений металлов.
В качестве процесса разделения в основном используются массообменные процессы. Одной из разновидностей массообменных процессов является жидкостная экстракция, при которой разделение происходит с использованием добавочного компонента.
Экстракцией называют процессы разделения жидких смесей и извлечение компонентов из твердых или жидких веществ при помощи жидкого растворителя (экстрагента), избирательно растворяющего только извлекаемые компоненты. Наиболее распространена в радиохимической промышленности жидкостная экстракция (система жидкость-жидкость).
При жидкостной экстракции исходный раствор обрабатывается экстрагентом, который не растворим или мало растворим в исходной смеси. В результате взаимодействия экстрагента с исходным раствором образуются: экстракт – раствор извлеченных из исходной смеси компонентов в экстрагенте и рафинат – жидкая смесь, обедненная извлекаемыми компонентами и обычно содержащая некоторое количество экстрагента.
Разделение жидкой смеси методом экстракции складывается из следующих процессов:
1) смешение исходной смеси с экстрагентом для создания между ними тесного контакта;
2) разделение двух несмешивающихся жидких фаз (экстракта и рафината);
3) регенерация экстрагента, т.е. удаление его из экстракта и рафината.
Основными аппаратами в которых осуществляется экстракция являются: экстракционные колонны, смесители-отстойники, центробежные экстракторы.
Смесители-отстойники состоят из набора смесительно-отстойных камер. В каждую секцию входят смесительная и отстойная камеры. В смесительной камере, являющейся по существу непрерывным реактором полного смешения, органическая и водная фазы перемешиваются, образуя эмульсию. Эмульсия передается в отстойную камеру, где фазы разделяются при отстое и выдаются раздельно в соседние смесительные камеры. Перемешивание осуществляется с помощью мешалок, пульсирующего давления и т.д.
Процессы многоступенчатой экстракции проводятся непрерывным способом в ряде ступеней, состоящих из смесителей и отстойников (рисунок 1.1). Наиболее распространена противоточная многоступенчатая экстракция. Исходный раствор и экстрагент поступают с противоположных концов аппарата; например, исходный раствор попадает в первую ступень, экстрагент в последнюю ступень. Соответственно из первой ступени удаляется конечный экстракт, а из последней конечный рафинат.
В этом процессе свежий экстракт вступает в контакт с рафинатом, имеющим наименьшую концентрацию распределяемого компонента, и после многократного контактирования в последовательных ступенях процесса насыщается извлекаемым веществом. В результате требуемая степень экстракции достигается при минимальном расходе экстрагента.
При противоточной многоступенчатой экстракции в последней по ходу экстракта ступени экстракт контактируется с исходным раствором. Поэтому наибольшая концентрация распределяемого компонента в экстракте является равновесной с концентрацией его в исходном растворе.
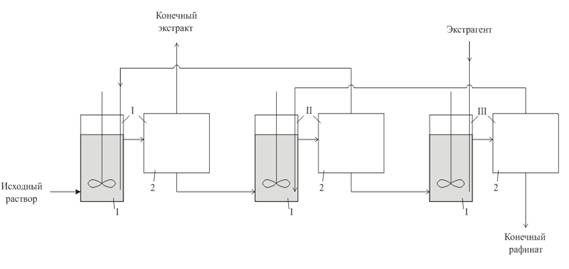
I, II, III – аппараты первой, второй и третьей ступени;
1 – смеситель, 2 – отстойник.
Рис.1.1. Схема противоточной многоступенчатой экстракции
Радиохимическое производство обладает рядом специфических особенностей, которые сказываются на разработке систем автоматизации и их эксплуатации.
Условия проведения химико-технологических процессов характеризуются высокими давлениями и температурами, агрессивностью обрабатывающих сред, необходимостью обеспечения безопасностью при любых, в частности потенциально опасных процессах.
Получение текущей информации о ходе технологического процесса связано с определением концентраций веществ в радиоактивных растворах. Это сужает и без того неширокий круг методов и приборов контроля состава, используемых в общих химических производствах. Требования же к качеству проведения процесса высоки, следовательно, нужна высокая точность измерения.
Применяемые средства контроля должны обладать повышенной надежностью, так как при размещении их в радиоактивной зоне проверки, замена и т.п. операции весьма не желательны, а часто просто не возможны.
Все эти и многие другие, здесь не рассматриваемые особенности радиохимических производств привели к определенным требованиям к системам управления. Одним из наиболее важных требований является обеспечение безопасности. Для обеспечения этого необходимо выполнять наблюдение за системой в режиме реального времени, диагностировать отказы для увеличения надежности таких систем. Ранее выявление отказов позволяет предотвратить дальнейшее его развитие и, следовательно, возникновение более существенных повреждений, неполадок, последствия которых могут быть даже катастрофическими.
Развитие диагностики началось в ранние 1970-е. В 1973 году Джонс представил, например, хорошо известный метод «фильтров выявления отказов» для линейных систем.
Виллски обобщил ранние исследования в этой области. Ролт рассмотрел применение методов идентификации к выявлению отказов реактивных двигателей. Методы корреляции были применены для выявления протечек Изерманом
Первая книга по методам диагностики, основанным на моделях, применительно к химическим процессам была опубликована Химмелблау в 1978. Выявление отказов датчиков, основанное на аналитической избыточности наблюдателей было предложено Кларком.
Использование методов оценки параметров для выявления отказов технических систем было продемонстрировано Холлманом, Гейгером, Филбертом и Метсгером. Развитие методов выявления отказов процесса, основанное на моделировании, оценке параметров и состояния, было обобщено Изерманом. Методы вектора равенства были изначально предложены Шой и Вилски, а затем в дальнейшем доработаны Патоном и Ченом.
Методы частотной области обычно применяются когда воздействие как отказов, так и возмущений имеет частотные характеристики, отличающиеся друг от друга и, следовательно, частотный спектр служит критерием различения отказов. Данные методы рассматриваются в работах Франка и Динга.
Задача отделения рассогласований от возмущений рассматривается в нескольких статьях. Например, Шоу и Вилски, Чанг, Спейер, Лю и др. предложили оптимальные надежные отношения равенства, а Энами и Наэни выдвинули концепцию порогового селектора. Чен и Патон для выполнения надежной диагностики использовали метод отделения возмущений. Метод Патона и Чена интересен в противопоставлении с методом Шоу и Вилски, которые минимизировали моделируемую неопределенность, для нескольких рабочих точек. Патон и Чен рассматривали эту проблему непосредственно при оценке оптимальной матрицы неизвестных входных возмущений в диапазоне рабочих точек и использовали метод распределения собственных чисел.
2. Описание метода диагностики отказов
2.1. Основные понятия метода
Под «отказом» будем понимать неожиданное изменение функций системы, даже если оно не представляет собой физический отказ или поломку (аварию). Подобный отказ или неисправность препятствуют нормальной работе автоматической системы или нарушают ее. Это вызывает неприемлемое ухудшение функционирования системы или даже приводит к опасным ситуациям. Термин отказ использовать предпочтительнее, чем термин сбой, так как первый обозначает неисправность, а второй ближе к понятию «катастрофа». Термин сбой означает поломку компонента системы или функции, а термин отказ может быть использован для указания того, что неисправность, на ее ранней стадии, может быть приемлемой (допустимой), для предотвращения каких-либо серьезных последствий. Однако, для предотвращения каких-либо серьезных последствий, отказ должен быть диагностирован как можно раньше, даже если он приемлем на ранней стадии его возникновения.
Система, используемая для выявления отказов и диагностики их локализации и значимости в системе называется «системой диагностики отказов». Такая система обычно состоит из следующих задач:
выявление отказа: принятие бинарного решения – что-то вышло из строя или все нормально;
изоляция отказа: определение локализации отказа т.е. определение того, какой датчик или исполнительный механизм неисправен;
идентификация отказа: оценка размера и типа или природы отказа.
Сравнительная значимость этих трех задач явно субъективна, однако, выявление необходимо для любой практической системы, что так же важно как и изоляция. С другой стороны, идентификация отказа, тоже несомненно полезна, хотя может быть не самой важной задачей, если включает в себя действия по реконфигурации. Поэтому, в литературе, диагностика отказов очень часто рассматривается как их выявление и изоляция.
2.2. Диагностика отказов, основанная на принципе аналитической избыточности
С начала 1970-х годов проблеме диагностики и изоляции отказов динамических процессов стали уделять все большее внимание. Было изучено и разработано большое количество методологий основанных на физической и аналитической избыточности.
Широко распространены традиционные подходы диагностики отказов, основанные на методах «аппаратной (или физической)» избыточности, которые используют дополнительные наборы датчиков, исполнительных механизмов, компьютеров и программного обеспечения для измерения и/или управления отдельными переменными. Основные недостатки этих методов аппаратной избыточности – дополнительное оборудование и стоимость технического обслуживания, а так же дополнительное пространство, требуемое для размещения оборудования.
В схемах аналитической избыточности, результирующее различие формируется из проверки на непротиворечивость различных переменных, называемых рассогласованиями. Рассогласование должно быть равно нулю, когда система работает нормально, а при отказе в системе, должно отличаться от нуля. Это свойство рассогласования используется для определения того, есть отказ в системе или нет.
Аналитическая избыточность предполагает использование математических моделей системы, за которой осуществляется мониторинг и, следовательно, часто рассматривается как метод диагностики отказов, основанный на моделях.
Проверка на непротиворечивость в аналитической избыточности обычно выполняется посредством сравнения измеряемого сигнала с оценкой. Оценка формируется математической моделью, рассматриваемой системы. Сравнение позволяет использовать рассогласования, вычисляемые как разница между измеряемым сигналом и соответствующим сигналом, формируемым математической моделью. Поэтому, диагностика отказов, основанная на моделях определяется как определение отказов системы из сравнения доступных измерений системы с априорной информацией, представленной математической моделью системы, посредством формирования рассогласований и их анализа.
Рассогласование – индикатор отказа, основанный на разнице между измерениями и вычислениями на основе модели.
На практике, наиболее часто используемый метод диагностики – это наблюдение за уровнем (или трендом) рассогласования и принятие необходимых мер в случае превышения рассогласованием установленного порога. Этот метод сравнения с граничным (пороговым) значение (метод геометрического анализа) очень прост в использовании, однако он имеет несколько серьезных недостатков.
Первый недостаток заключается в том, что при наличии шума, вариаций входа и изменений режима работы исследуемого процесса возможно возникновение ложных отказов.
Это не простая проблема. Так как методы диагностики отказов, основанные на моделях, проектируются для выявления любых отличий между поведением реальной системы и модели, то предполагается, что сигнал разницы связан с отказом. Тем не менее, этот же сигнал разницы может реагировать на несоответствие модели или шум измерений, которые могут быть выявлены как отказы, что приведет к ложной тревоге. Эта проблема – предмет исследований в области «надежных» методов, в которых особое внимание уделяется отделению отказов от ошибок, связанных с неточностью модели. С другой стороны, доступность «хорошей» модели исследуемой системы может значительно улучшить выполнение диагностики, минимизируя ложные тревоги.
Второй недостаток связан с тем, что один отказ может вызвать превышение граничных значений многих сигналов системы, как в случае многих отказов, поэтому изоляцию отказов выполнить очень трудно.
Этот метод имеет некоторые преимущества по сравнению с методом физической избыточности. В основном это связано с экономическим и практическим аспектами. Метод аналитической избыточности не требует дополнительного оборудования – это его основное преимущество. Основные недостатки метода связанны с необходимостью использования точной модели реальной системы, получить которую достаточно трудно.
На рисунке 2.1 изображена концепция аналитической избыточности.
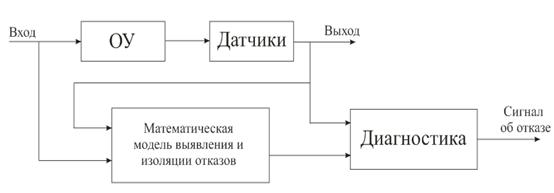
Рис. 2.1. Схема аналитической избыточности
2.3. Основные принципы диагностики отказов, основанной на использовании моделей
2.3.1. Метод диагностики отказов, основанный использовании моделей
Диагностика отказов, на основе использования моделей, может быть определена как выявление, изоляция и характеристика отказов компонентов системы посредством, сравнения доступных измерений системы с априорной информацией, представленной математической моделью системы.
Отказы выявляются посредством установки фиксированных или изменяющихся порогов на сигналы рассогласования, формируемые на основе различия действительных измерений и их оценок, определяемых с использованием модели процесса.
Количество рассогласований может быть выбрано таким образом, чтобы каждый сигнал рассогласования был чувствителен одному отказу, происходящему в определенном месте системы. После того как рассогласование превысило пороговое значение, проводится анализ рассогласования для выполнения изоляции отказа.
На рисунке 2.2 представлена общая логическая блок-схема диагностики системы, на основе использования моделей.
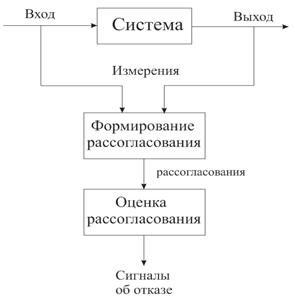
Рис. 2.2. Структура диагностики отказов, основанной на моделях
Рассматриваемая система диагностики содержит два основных блока: формирование рассогласования и оценка рассогласования (принятие решения). Эти блоки могут быть описаны следующим образом:
1. Формирование рассогласования: этот блок формирует сигналы рассогласования с использованием доступных входов и выходов, системы за которой осуществляется мониторинг. Эти рассогласования (или симптомы отказа) должны выступать индикаторами возникновения отказа в системе. Они должны быть равны нулю или близки к нему по величине при отсутствии отказов, и значительно отличаться от нуля при наличии отказов. Это значит, что в идеальных условиях, рассогласованию характерна независимость от входов и выходов процесса.
2. Оценка рассогласования (принятие решения): Этот блок проверяет рассогласования на вероятность отказов и принимает решение, которое затем применяется для определения того, какой отказ произошел. Блок оценка рассогласования, представленный на рисунке 2.2, может выполнять простой пороговый тест (геометрический метод) мгновенной величины или скользящего среднего рассогласования. С другой стороны, он может содержать статистические методы, т.е. обобщенное тестирование отношения правдоподобия или тестирование отношения вероятностей.
2.3.2. Диагностика отказов при работе системы
Диагностика отказов, основанная на моделях рассматривается в основном как диагностика, которая осуществляется во время работы системы. Причиной этого является то, что информация о входе и выходе системы, необходимая для диагностики, основанной на моделях, доступна только во время работы системы. Связь между системой диагностики отказов (или наблюдением) и циклом управления представлена на рисунке 2.3.
Информация, используемая для диагностики – это измеряемый датчиком выход и вход исполнительного механизма. Измерение выхода обычно необходимо для управления по обратной связи, тогда как вход исполнительного механизма требуется для управления действиями, формируемыми контроллером, которые обычно выполняются в микропроцессоре. Поэтому, для выполнения диагностики отказов, обычно, необходимость в дополнительных аппаратных ресурсах отсутствует, за исключением требуемой дополнительной производительности компьютера.
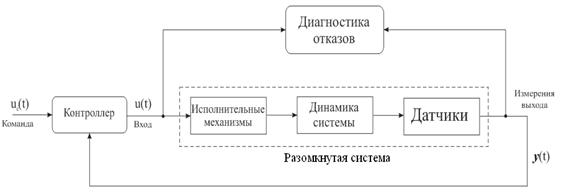
Рис. 2.3. Диагностика отказов в замкнутом цикле
Из рисунка 2.3 можно увидеть, что модель системы, необходимая для диагностики, основанной на моделях, является моделью системы без обратной связи, так как мы рассматриваем систему в цикле управления. Причиной этого является то, что информация о входе и выходе системы, требуемая для диагностики, основанной на моделях, связана с системой без обратной связи. Поэтому, при проектировании схем диагностики нет необходимости рассматривать контроллер. Это соответствует принципам теории управления по причине того, что диагностика отказов может трактоваться как задача наблюдения. Так как вход исполнительного механизма считается доступным, то безразлично система работает в открытом цикле или в закрытом. Задача диагностики при этом одна и та же.
В случаях, когда вход исполнительного механизма u(t) не доступен, для диагностики можно использовать соответствующие команды uc(t). В этому случае, используемая модель представляет собой взаимосвязи между командами uc (t) и измеряемым выходом y(t) и является замкнутой моделью. В этом случае контроллер играет важную роль при проектировании схем диагностики. Надежный контроллер может уменьшить чувствительность к воздействию отказов и очень затруднить диагностику. Эта проблема рассматривалась многими исследователями. Лучшее ее решение – одновременное проектирование схем диагностики отказов и контроллера.
2.3.3. Моделирование систем с отказами
Первый шаг в методе диагностики, основанном моделях, состоит в выполнении математического описания рассматриваемой системы, которое так же описывает все возможные случаи отказов. Будем рассматривать линейные динамические системы со многими входами и выходами. В случае нелинейных систем, можно рассматривать линеаризованную в рабочей точке модель.
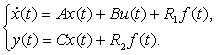
Как было отмечено ранее, мы будем рассматривать диагностику отказов для модели системы без обратной связи. В целях моделирования система без обратной связи может быть разделена на три части: исполнительные механизмы, динамика системы и датчики (рисунок 2.4).

Рис.2.4. Система без обратной связи
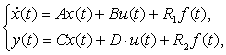
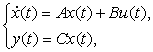
Динамика системы, представленной на рисунке 2.4 может быть описана моделью в переменных состояния:
 (2.1)
(2.1)
где ![]() - вектор состояния системы,
- вектор состояния системы, ![]() - вектор входного сигнала с
исполнительного механизма,
- вектор входного сигнала с
исполнительного механизма, ![]() -
фактический (не доступный) выходной вектор системы; А, В, С -
известные матрицы системы соответствующих размерностей.
-
фактический (не доступный) выходной вектор системы; А, В, С -
известные матрицы системы соответствующих размерностей.

Рис. 2.5. Динамика системы
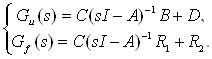
Когда происходит отказ компонента в системе (рисунок 2.5), динамическая модель системы может быть описана так:
![]() . (2.2)
. (2.2)
Отказ компонента представляет случай, когда изменение некоторых условий в системе приводит к невыполнению динамических отношений, например, утечка в баке в системе двух баков. В некоторых случаях, отказ может быть выражен как изменение параметров системы. Например, при изменении в i-ой строке и j-ом столбце матрицы А, динамика системы может быть описана так:
![]() , (2.3)
, (2.3)
где ![]() - это j-ый
элемент вектора
- это j-ый
элемент вектора ![]() и
и ![]() - это n-мерный вектор с нулевыми элементами,
кроме ‘1’ в i-том
элементе.
- это n-мерный вектор с нулевыми элементами,
кроме ‘1’ в i-том
элементе.
Вообще
говоря, реальный выход ![]() системы
непосредственно не доступен, для его измерения используются датчики. Этот
случай отказа изображен на рисунке 2.6 и математически может быть описан следующим
образом (при пренебрежении динамикой датчиков):
системы
непосредственно не доступен, для его измерения используются датчики. Этот
случай отказа изображен на рисунке 2.6 и математически может быть описан следующим
образом (при пренебрежении динамикой датчиков):
![]() , (2.4)
, (2.4)
где ![]() - вектор отказа датчика.
- вектор отказа датчика.
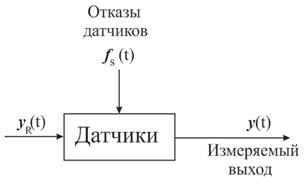
Рис. 2.6. Датчики, выход и измеряемый выход
Правильно
выбрав вектор ![]() , мы можем описать все случаи отказов датчиков. Когда
выходной датчик показывает фиксированную величину (скажем ноль), вектор
измерения y(t)=0 и вектор отказа
, мы можем описать все случаи отказов датчиков. Когда
выходной датчик показывает фиксированную величину (скажем ноль), вектор
измерения y(t)=0 и вектор отказа ![]() = - yR(t). С другой стороны, когда датчики
подвержены мультипликативному отказу, измерение становится
= - yR(t). С другой стороны, когда датчики
подвержены мультипликативному отказу, измерение становится ![]() , а вектор отказов может
быть переписан так
, а вектор отказов может
быть переписан так ![]() =
=![]() .
.
Так же верно, что обычно действительный сигнал с исполнительного механизма
![]() системы часто не доступен.
системы часто не доступен.
![]() это реакция исполнительного
механизма на команду
это реакция исполнительного
механизма на команду ![]() (при
пренебрежении динамикой исполнительного механизма) (рисунок 2.6):
(при
пренебрежении динамикой исполнительного механизма) (рисунок 2.6):
![]() , (2.5)
, (2.5)
где ![]() -
вектор отказа исполнительного механизма, а
-
вектор отказа исполнительного механизма, а ![]() -
известная команда управления. Подобно случаю отказа датчика, могут быть
рассмотрены так же различные ситуации для функции отказа
-
известная команда управления. Подобно случаю отказа датчика, могут быть
рассмотрены так же различные ситуации для функции отказа ![]() .
.
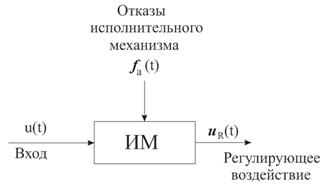
Рис. 2.7. Исполнительный механизм, вход и регулирующее воздействие
В случае, если вход системы неизвестен (т.е. в неконтролируемых системах), для измерения входа исполнительного механизма может быть использован входной датчик (рисунок 2.8). Датчик может быть представлен следующей моделью:
![]() , (2.6)
, (2.6)
![]() . (2.7)
. (2.7)
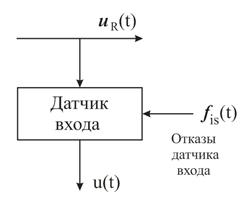
Рис. 2.8. Датчик входа
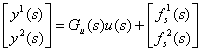
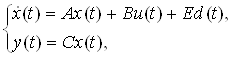
Когда в системе действуют всевозможные отказы датчиков, ее компонентов и исполнительных механизмов, ее модель может быть представлена следующим образом:
 (2.8)
(2.8)
Рассматривая общий случай модель системы со всевозможными отказами может быть описана следующей моделью в переменных состояния:
 (2.9)
(2.9)
где ![]() - вектор отказов, каждый
элемент которого
- вектор отказов, каждый
элемент которого ![]() (i=1,2,…g) соответствует отдельному отказу. С практической точки
зрения, неразумно делать дальнейшие предположения о характеристиках отказов,
считая при этом их неизвестными функциями времени. Матрицы R1 и R2 известны как матрицы распределения отказов,
представляющие воздействие отказов на систему. Вектор u(t) – это вход
исполнительного механизма и или измеряемое управляющее воздействие (actuation), вектор y(t) – измеряемый выход. Оба вектора считаются известными
при диагностике. В литературе по диагностике отказов векторы u(t) и y(t) просто называются входными и выходными
векторами системы, за которой осуществляется мониторинг.
(i=1,2,…g) соответствует отдельному отказу. С практической точки
зрения, неразумно делать дальнейшие предположения о характеристиках отказов,
считая при этом их неизвестными функциями времени. Матрицы R1 и R2 известны как матрицы распределения отказов,
представляющие воздействие отказов на систему. Вектор u(t) – это вход
исполнительного механизма и или измеряемое управляющее воздействие (actuation), вектор y(t) – измеряемый выход. Оба вектора считаются известными
при диагностике. В литературе по диагностике отказов векторы u(t) и y(t) просто называются входными и выходными
векторами системы, за которой осуществляется мониторинг.
Представление системы со всеми возможными отказами в виде передаточной матрицы вход-выход имеет вид:
![]() , (2.10)
, (2.10)
где
 (2.11)
(2.11)
2.3.4. Общая структура формирования рассогласования в диагностике отказов, основанной на моделях
Наиболее часто используемые методы диагностики предполагают использование априорной информации о характеристиках определенных сигналов (т.е. амплитуды и частотных свойств). Например, мы можем контролировать уровень или динамический диапазон сигнала, максимальную скорость изменения и его спектр. Основными недостатками данной группы методов являются:
необходимость априорной информации о характеристиках сигналов;
недоступная зависимость этих характеристик от режима работы системы, который априорно неизвестен и может меняться заблаговременно.
Для устранения недостатков традиционных методов наиболее очевидным вкладом в современные методы, основанные на моделях, является использование рассогласований, которые не зависят от режима работы системы, а реагируют только на отказы в характеристических свойствах. Рассогласования являются количественными, что представляет несоответствие между переменными реальной системы и математической моделью. Основанные на математической модели многие инвариантные (неизменяемые) связи (динамические или статические) между различными переменными системы могут быть вторичными (производными), и любые нарушения этих связей могут быть использованы как рассогласования.
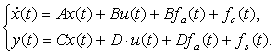
Формирование рассогласования может быть выполнено в терминах структуры избыточного сигнала, как представлено на рисунке 2.9. В этой структуре система (процессор или алгоритм) F1(u,y) генерирует вспомогательный (избыточный) сигнал z, который вместе с y генерирует рассогласование r, удовлетворяющее следующему инвариантному отношению при отсутствии отказа:
r(t) = F2 (y(t), z(t)) = 0. (2.10)
Когда в системе возникает отказ эта инвариантная связь будет нарушена и рассогласование будет отличаться от нуля.
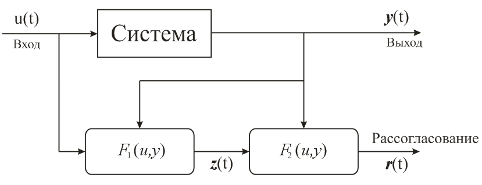
Рис. 2.9. Структура избыточного сигнала в формировании рассогласования
Простейшим методом формирования рассогласования является использование системы дубликата т.е. система F1 формируется идентичной реальной модели системы. Она имеет такой же как и система выходной сигнал. В этом случае, в блоке F1 сигнал y не требуется. Блок F1 в этом случае является имитатором системы. Сигнал z – это имитируемый выход системы, а рассогласованием является отличие между z и y. Основным преимуществом данного метода является его простота. Основным недостатком является то, что, когда исследуемая система неустойчива, стабильность имитатора не может быть гарантирована. Это является следствием того, что для диагностики отказов используется модель разомкнутой системы (рисунок 2.3).
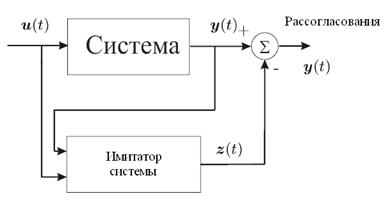
Рис. 2.10. Формирование рассогласования с имитатором системы
Прямым продолжением генерации рассогласования, основанной на использовании имитатора, является замена имитатора оценщиком выхода, который требует знания как входа, так и выхода системы. В этом случае, система F1(u,y) для формирования оценки линейной функции выхода y - My требует сигналы u и y, а система F2 может быть определена как F2(y,z) = Q(z - My), где Q – статическая (или динамическая) весовая матрица.
Независимо от используемого типа метода, формирователь рассогласования является только линейным обрабатывающим устройством, на вход которого подаются вход и выход системы, за которой осуществляется мониторинг. Общая структура формирователя рассогласования представлена на рисунке 2.11.
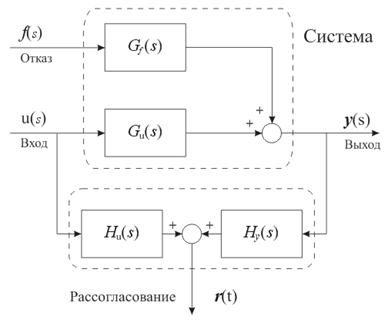
Рис.2.11. Общая структура формирования рассогласования
Структура формирователя рассогласования математически выражается так:
![]() (2.11)
(2.11)
где Hu(s) и Hy(s) – передаточные матрицы, которые могут быть спроектированы с использованием устойчивой линейной системы. В соответствии с определением, рассогласование r(t) должно быть спроектировано таким образом, чтобы равняться нулю при отсутствии отказа и отличаться от нуля в случае отказов. Это означает, что
r(t)= 0 только если f(t) = 0 . (2.12)
Чтобы выполнялось уравнение 2.12, проектируемые передаточные матрицы Hu(s) и Hy(s) должны удовлетворять условиям:
![]() . (2.13)
. (2.13)
Уравнение (2.11) – это обобщенное представление всех формирователей рассогласования. Проектирование формирователя рассогласования происходит просто в результате выбора передаточных матриц Hu(s) и Hy(s), которые должны удовлетворять уравнению (2.13). Различные пути формирования рассогласований соответствуют различным параметрам Hu(s) и Hy(s). Используя свободу проектирования, можно выбрать желаемое выполнение рассогласования соответствующим выбором Hu(s) и Hy(s).
После
формирования рассогласования, простейший и наиболее часто используемый путь
выявления отказов - выполнение прямого сравнения сигнала рассогласования r(t) или функции рассогласования J (r(t)) с фиксированным порогом є или
с пороговой функцией ![]() :
:
![]() (2.14)
(2.14)
где f(t) – общий вектор отказов, определенный в уравнении 2.9. Если рассогласование превышает порог, значит, произошел отказ.
Существует много путей определения функций оценки и порогов. Например, оценочная функция рассогласования может быть выбрана как норма вектора рассогласования, а порог можно выбрать как постоянную положительную величину (фиксированный порог).
2.3.5. Выявляемость отказов
Когда в процессе, за которым осуществляется мониторинг, возникает отказ, реакция рассогласования на него определяется так:
![]() , (2.15)
, (2.15)
где ![]() определяется как
передаточная матрица отказов, представляющая соответствие между рассогласованиями
и отказами,
определяется как
передаточная матрица отказов, представляющая соответствие между рассогласованиями
и отказами, ![]() - i-ая колонка передаточной матрицы
- i-ая колонка передаточной матрицы ![]() , а fi(s) – i-ый
компонент f(s). (рисунок 2.12).
, а fi(s) – i-ый
компонент f(s). (рисунок 2.12).
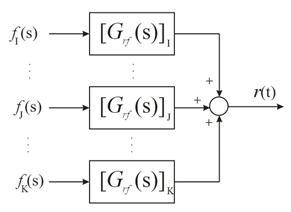
Рис. 2.12. Отказы и рассогласования
Условие выявляемости отказов
Передаточная
матрица играет важную роль в диагностике и должна быть детально исследована.
Для того, чтобы выявить i-ый отказ
fi в рассогласовании r(s), i-ая
колонка ![]() передаточной матрицы
передаточной матрицы ![]() должна быть не равна нулю:
должна быть не равна нулю:
![]() ≠ 0. (2.16)
≠ 0. (2.16)
Если это условие выполняется, i-ый отказ fi можно выявить в рассогласовании r(t). Это условие определяется как условие выявляемости отказа рассогласования r к отказу fi.
Строгое условие выявляемости отказов
Выполнение условия выявляемости отказов не является достаточным для выполнения выявления отказов. Поэтому, вводится строгое условие выявляемости:
![]() ≠ 0, (2.17)
≠ 0, (2.17)
Если это условие выполняется, то i – ый отказ строго выявляем в рассогласовании r.
2.3.6. Изолируемость отказов
За успешным выявлением отказов следует процедура изоляции отказа, в результате которой отказ отделяется (изолируется) от других отказов. В то время как один сигнал рассогласования достаточен для выявления отказов, для изоляции отказов обычно требуется несколько сигналов рассогласований (или вектор рассогласований). Если отказ отличим от других отказов с использованием одной группы отказов (или вектора рассогласования), то можно сказать, что этот отказ изолируем с использованием этой группы рассогласований (или этого вектора рассогласований). Если вектор рассогласования может изолировать все отказы, то можно сказать что этот вектор рассогласований обладает требуемым свойством изолируемости.
2.3.6.1. Структурирование рассогласований
Одним из методов решения задачи изоляции отказов является проектирование группы рассогласований. Каждое рассогласование проектируется чувствительным к нескольким отказам, при этом оставшиеся рассогласования группы нечувствительны к оставшимся отказам. Построение группы рассогласований, которые должны быть чувствительны к отдельным отказам и нечувствительны к другим отказам известно как структурирование рассогласований.
Процедура проектирования включает в себя два этапа:
первый – определить чувствительные и нечувствительные отношения между рассогласованиями и отказами, соответствующими заданной задаче изоляции;
второй – спроектировать множество формирователей рассогласований в соответствии с принятыми чувствительными и нечувствительными взаимосвязями.
Преимуществом структурирования рассогласований является то, что диагностика упрощается. При этом диагностика заключается в том, чтобы определить какое рассогласование не равно нулю. Для этого отдельно для каждого рассогласования можно выполнить пороговый тест, создавая логическую таблицу решений. С помощью этой таблицы задача изоляции отказов может быть полностью решена.
Если все возможные отказы являются изолируемыми, то группа рассогласований может быть спроектирована в соответствии со следующими условиями чувствительности к отказам:
ri (t) = R(fi (t)); iÎ{1,2 … g}, (2.18)
где R( ) обозначает функциональное отношение. Это называется группой рассогласований Кларка по которой строится схема наблюдателей Кларка, предложенная Кларком (1978г.). Для принятия решения о возникновении определенного отказа может быть использована простая пороговая логика:
ri(t)> Ti => fi(t) ≠ 0, iÎ{1,2 … g}, (2.19)
где Ti (i=1,2 … g) – пороги. Эта структура изолируемых рассогласований очень проста, все отказы могут выявляться одновременно, однако для проектирования на практике эта схема сложна. Даже когда такая совокупность рассогласований может быть спроектирована, обычно при этом не остается свободы проектирования для выполнения других требований, например, устойчивости к ошибкам моделирования.
Наиболее часто используемая и лучшая схема при проектировании совокупности – схема в которой каждое рассогласование чувствительно ко всем отказам, за исключением одного:
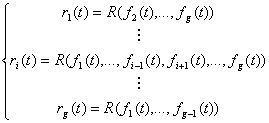 , (2.20)
, (2.20)
Эта схема называется группой рассогласований Франка (Франк, 1987). Если все рассогласования группы рассогласований Франка формируются с использование блока наблюдателей (формирование рассогласований с использованием наблюдателей), то такая структура называется схемой наблюдателей Франка. Изоляция отказов так же может быть выполнена с использованием простого порогового тестирования в соответствии со следующей логикой:
 (2.21)
(2.21)
для i=1,2 … g.
В качестве простого примера рассмотрим изоляцию трех различных отказов {f1, f2, f3}. Проектирование группы рассогласований может быть выполнено двумя различными способами как изображено на рисунке 2.13. Отказы можно уникально изолировать так же двумя различными методами ((2.19) или (2.20)).
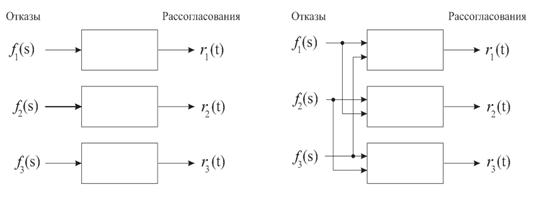
а) схема Кларка б) схема Франка
Рис. 2.13. Группа рассогласований, построенная по схемам Кларка и Франка
2.3.6.2. Фиксирование направления вектора рассогласования
Альтернативным путем выполнения изоляции отказов является проектирование направлений вектора рассогласования, который лежит в фиксированном и специальном для отказа направлении (или субпространстве) в пространстве рассогласований, в соответствии с определенным отказом. Если сделать:
r(t| fi(t)) = αi(t)li; iÎ{1,2 … g}, (2.22)
где постоянный вектор li – сигнатура направления i-го отказа в пространства рассогласований, а = αi – скаляр, который зависит от размера отказа и динамики. С фиксацией направления рассогласования, задача изоляции отказа заключается в определении того, в каком из известных направлений сигнатур отказа лежит вектор генерируемого рассогласования. Чтобы достоверно изолировать отказы, каждая сигнатура отказа должна быть уникально связана с отказом. На рисунке 2.14 изображен метод изоляции отказов с использованием вектора рассогласования в котором рассогласование связано с направлением сигнатуры отказа f2 и, следовательно, в системе наиболее вероятен отказ f2.
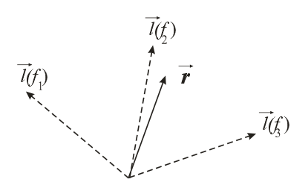
Рис. 2.14. Направленный вектор рассогласования для изоляции отказа
2.3.6.3. Изоляция отказов датчиков и исполнительных механизмов
Если нам необходимо выявить только отказы датчиков, то выход системы может быть задан так:
y(s) = Gu(s)u(s) + fs(s). (2.23)
Если мы хотим спроектировать сигнал рассогласования, чувствительный только к одной группе отказов fs1(s) и нечувствительным к другой группе отказов fs2(s), вышеприведенное уравнение может быть переписано так:
 . (2.24)
. (2.24)
Тогда генератор рассогласования примет следующий вид:
r1(s) = Hu1(s) u(s)+ Hy1(s)y1(s). (2.25)
При подстановке y1(s) в это уравнение получим:
r1(s) = [Hu1(s) + Hy1(s)Gu(s)]u(s) + Hy1(s)fs1(s). (2.26)
Рассогласование будет чувствительно только к одной группе отказов fs1(s), когда матрицы передаточной функции генератора рассогласования будут удовлетворять следующим условиям:
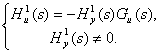 (2.27)
(2.27)
Это обычное требование для генератора рассогласования. Передаточная матрица Hy1(s) может быть выбрана свободно в соответствии со специальными требованиями. Единственное условие состоит в том, что Hy1(s) должна быть устойчива и реализуема. После выбора Hy1(s) можно определить Hu1(s) в соответствии с формулой Hu1(s)=- Hy1(s)Gu(s). Передаточная матрица Hy1(s) может быть выбрана свободно, поэтому изоляция отказов датчиков всегда возможна.
При возникновении в системе отказа исполнительного механизма, выход системы определяется так:
y(s) = Gu(s)(u(s) + fa(s)), (2.28)
Если мы хотим спроектировать сигнал рассогласования, чувствительный к одной группе отказов fa1(s) и нечувствительный к другой группе отказов fa2(s), то вышеприведенное уравнение будет иметь вид:
y(s) = Gu1(s)[u1(s) + fa1(s)]+ Gu2(s)[u2(s) + fa2(s)]. (2.29)
В этом случае генератор рассогласования:
r1(s) = Hu1(s) u1(s)+ Hy1(s)y(s). (2.30)
При подстановке y(s) в (4.30) получим:
r1(s) = [Hu1(s)+ Hy1(s) Gu1(s)] u1(s)+ Hy1(s) Gu1(s)fa1(s)+
+ H1(s)Gu2(s)[ u2(s)+ fa2(s)]. (2.31)
Чтобы сделать рассогласование чувствительным только к одной группе отказов fa1(s), необходимо выполнение следующих условий:
Hu1(s)= - Hy1(s) Gu1(s),
Hy1(s) Gu2(s)=0, (2.32)
Hy1(s) Gu1(s) ≠0.
Эти уравнения иллюстрируют, что для решения задачи изоляции отказов исполнительного механизма требуется дополнительное условие (Hy1(s) Gu2(s)=0). Устойчивая и реализуемая передаточная матрица Hy1(s), удовлетворяющая этим условиям не всегда существует. Поэтому, мы не обладаем полной свободой при выполнении требований в изоляции отказов исполнительного механизма. Следовательно, изоляция отказов исполнительного механизма не всегда возможна.
2.3.7 Техники формирования рассогласования
Центральной проблемой при диагностике отказов с использованием моделей является формирование сигналов рассогласования. Существует большое количество методов формирования рассогласования. Рассмотрим подробнее более распространенные. Большинство методов могут применяться как к непрерывным, так и к дискретным моделям, тем не менее некоторые методы могут применяться только к дискретным моделям.
2.3.7.1. Методы, основанные на использовании наблюдателей
Основная идея данной группы методов формирования рассогласования состоит в оценке выходов системы по измерениям с использованием наблюдателей Люненбергера в детерминированной среде или фильтров Калмана в стохастической среде. Затем в качестве рассогласования используется (взвешенная) ошибка оценки выхода или порожденная случайная величина в стохастическом случае. Данный метод будет рассмотрен подробнее применительно к наблюдателям состояния и наблюдателям при неизвестном входе далее в пункте 2.11.
2.3.7.2. Методы, основанные на оценке параметров
Диагностика отказов с использованием моделей может быть так же выполнена с использованием техник идентификации. Этот метод основан на предположении о том, что отказы являются отражением физических параметров системы таких как сила трения, масса, внутреннее трение, сопротивление, индуктивность, емкость и т.д. основная идея метода выявления отказов заключается в том, что параметры реального процесса оцениваются on-line с использованием широко известных методов оценки параметров. Результаты оценки сравниваются с параметрами эталонной модели, определенной при отсутствии отказов. Любое значительное отличие означает отказ. В этом методе обычно используется математическая модель вход-выход системы в следующей форме:
y(t) = f(P, u(t)), (2.33)
где P – вектор коэффициентов модели, непосредственное связанный с физическими параметрами системы. Функция f может быть как линейной так и нелинейной.
Основные этапы диагностика отказов, основанной на оценке параметров таковы:
установить модель процесса с использованием физических отношений;
определить взаимосвязи между коэффициентами модели и физическими параметрами процесса;
оценить нормальные коэффициенты модели;
вычислить нормальные физические параметры процесса;
определить изменения параметров для различных отказов.
При завершении последнего шага может быть построена база данных отказов и их признаков (симптомов). Во время работы системы периодически необходимо выполнять идентификацию коэффициентов модели системы по измеряемым входам и выходам и сравнивать с нормальными параметрами модели и параметрами с отказами.
Чтобы выполнить генерацию рассогласования в соответствии с этим методом, должен быть использован on-line алгоритм идентификации параметров. Если мы имеем оценку параметров модели на k-1 шаге P’k-1, рассогласование можно определить следующим образом:
![]() (2.34)
(2.34)
где Р0 – коэффициенты нормальной модели.
Выполнить изоляцию отказов с помощью оценки параметров достаточно трудно. Причиной этого является то, что идентифицированные параметры являются параметрами модели, которые не всегда могут быть преобразованы в физические параметры системы. Тем не менее, отказы представляются вариациями физических параметров.
2.3.8. Формирование рассогласований на основе наблюдателей состояния
Чтобы определить структуру наблюдателя, рассмотрим стационарную линейную динамическую модель исследуемого процесса:
 (2.35)
(2.35)
где ![]() ,
, ![]() ,
, ![]() .
.
При предположении, что все матрицы А, В и С точно известны, для воссоздания переменных системы на основе измерений входов и выходов используется наблюдатель состояния:
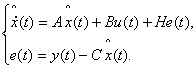 (2.36)
(2.36)
Схема наблюдателя, описываемого уравнением 2.36 изображена на рисунке 2.16.
Из уравнения 2.36 следует, что оценка ошибки состояния eх(t):
 (2.37)
(2.37)
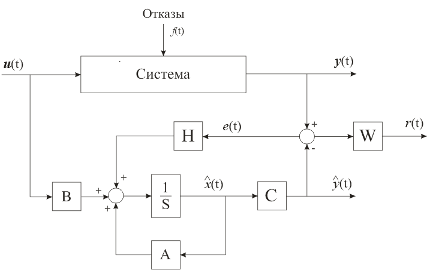
Рис. 2.16. Система и наблюдатель состояния
Ошибка оценки состояния eх(t) (и ошибка e(t)) асимптотически уменьшается:
![]() (2.38)
(2.38)
если наблюдатель устойчив. Обеспечение устойчивости наблюдателя достигается выбором матрицы обратной связи Н.
Система, на которую воздействуют отказы, как было показано ранее (пункт 2.4.), описывается следующим образом:
 (2.39)
(2.39)
Здесь f(t) – сигналы отказа на входе и выходе,
действующие через матрицы ![]() и
и ![]() соответственно. Они могут
представлять аддитивные отказы исполнительного механизма, процесса, входных и
выходных датчиков.
соответственно. Они могут
представлять аддитивные отказы исполнительного механизма, процесса, входных и
выходных датчиков.
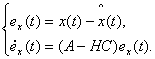
Для ошибки оценки состояния выполняются следующие уравнения:
![]() , (2.40)
, (2.40)
тогда выходная ошибка примет вид:
![]() . (2.41)
. (2.41)
Вектор f (t), в этом случае, представляет аддитивные отказы, так как они добавляются к e(t) и x(t).
Как видно из уравнения (2.40), при соответствующем выборе параметров матрицы обратной связи наблюдателя Н ошибка оценки состояния при отсутствии отказов асимптотически уменьшается (см. 2.39), а в случае появления внезапных или зарождающихся сигналов отказов f(t) ошибка оценки состояния будет отличаться от нуля. Ошибка оценки выхода e(t), определяемая по формуле (2.41) при возникновении отказов так же будет отлична от нуля.
Ошибки ![]() и
и ![]() могут быть использованы
как рассогласования. В частности, рассогласование
могут быть использованы
как рассогласования. В частности, рассогласование ![]() является
основой различных методов обнаружения отказов, использующих оценку выхода.
является
основой различных методов обнаружения отказов, использующих оценку выхода.
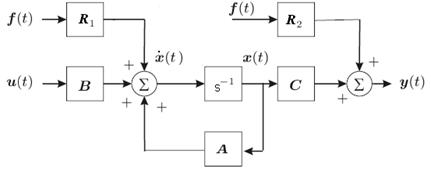
Рис. 2.17. Система с отказами
Если входные и выходные сигналы системы так же подвержены воздействию шума, то вместо классических наблюдателей используются фильтры Калмана.
Если отказы рассматриваются как изменения параметров ![]() или
или ![]() , то поведение
системы становится:
, то поведение
системы становится:
![]() (2.42)
(2.42)
а ошибки ![]() и
и ![]() :
:
 (2.43)
(2.43)
Изменения параметров ![]() и
и ![]() представляют собой мультипликативные
отказы.
представляют собой мультипликативные
отказы.
В этом случае, изменения в рассогласованиях зависят от изменений параметров, так же как и изменения входа и переменных состояния. Следовательно, влияние изменения параметров на рассогласование не такое простое, как в случае аддитивных отказов f(t).
Наблюдатели состояния могут быть использованы для изоляции отказов, при проектировании групп рассогласований или направлений вектора рассогласований. Для отказов датчиков, спроектировать группу рассогласований очень просто. Если нам необходимо сформировать рассогласование чувствительное ко всем отказам датчиков за исключением одного, то наблюдатель формирующий это рассогласование должен возбуждаться всеми выходами за исключением одного. Однако, проектировать группы рассогласований для изоляции отказов исполнительных механизмов труднее. Эта проблема может быть решена с помощью наблюдателей при неизвестном входе и метода распределения собственных чисел. Тем не менее, изоляция отказов исполнительных механизмов не всегда возможна и в этом случае. Фиксирование направления вектора рассогласования может быть выполнено с использованием фильтров выявления отказов.
2.3.9. Формирование рассогласований, не чувствительных к возмущениям и ошибкам линеаризации
Надежность системы диагностики отказов должна быть выше, чем надежность системы, за которой осуществляется мониторинг. Диагностика отказов, основанная на моделях, использует математические модели рассматриваемой системы. Лучшие модели используется для представления динамики системы, при этом случайно улучшая показатели надежности при диагностике отказов. Тем не менее, ошибки моделирования и возмущения в сложных инженерных системах неизбежны, и, следовательно, существует необходимость в создании надежных алгоритмов диагностики отказов. Надежность системы диагностики отказов означает, что эта система должна быть чувствительна только к отказам, даже при наличии отличий модели от реальности (т.е. вариаций параметров и т.д.) Обычно, воздействие вариаций параметров и возмущений на реальный процесс неизвестно, поэтому достаточно трудно спроектировать систему диагностики, которая обладала бы высокой чувствительностью к отказам и при этом была бы не чувствительна к неопределенностям и не моделируемым возмущениям.
Основа диагностики отказов с использованием моделей – формирование рассогласований. Воздействие отказов и неопределенностей на рассогласование различить достаточно трудно. Следовательно, задачей проектирования надежных систем диагностики является формировании рассогласований, нечувствительных к неопределенностям и, в то же время, чувствительных к отказам, и, следовательно надежных.
Чтобы обобщить проблему надежности, рассмотрим модель системы, содержащую все виды моделируемых неопределенностей, возникающих на практике и воздействующих на поведение системы:
 (2.45)
(2.45)
где d(t) - вектор неизвестного входа (возмущений), матрицы возмущений Е1 и Е2 принимаются известными. Матрицы ∆А, ∆В, ∆С и ∆D – ошибка параметров или вариации, представляющие ошибки моделирования. В этом случае описание системы в форме передаточной функции имеет вид:
![]() . (2.46)
. (2.46)
где Gd(s)d(s) – представляют эффект возмущений:
![]() , (2.47)
, (2.47)
∆Gu(s) используется для описания ошибок моделирования. Составляющие Gd(s)d(s) и ∆Gu(s) вместе представляют моделируемые неопределенности. Если подставить выход системы в уравнение формирования рассогласования (2.11), то получим:
![]() . (2.48)
. (2.48)
Из этого уравнения видно, что и отказы и неопределенности (возмущения и ошибки моделирования) воздействуют на рассогласование, и, поэтому различить их воздействие трудно.
Если рассогласование формируется удовлетворяющим уравнению:
![]() , (2.49)
, (2.49)
т.е. возмущения отделены от рассогласования, то рассогласование устойчиво к возмущению. Это – принцип отделения возмущений для формирования надежного рассогласования.
Для ошибок моделирования, представляемых ∆Gu(s), проблема надежности является более сложной. Было предложено два основных способа ее решения. Первый основан на попытке рассмотрения неопределенностей при проектировании рассогласований. Этот метод известен как активная надежность при диагностике. Второй метод называется пассивная надежность при диагностике. Этот метод предполагает использование адаптивного порога на стадии принятия решения.
2.4. Наблюдатели при неизвестном входе
Формирование надежных рассогласований является наиболее важной задачей в методах диагностики отказов, основанной на моделях. Методы отделения возмущений – основные методы, позволяющие решить данную задачу. В этих методах, неопределенные факторы моделирования системы рассматриваются как воздействие на неизвестный вход (или возмущения) модели линейной системы. Не смотря на то, что неизвестный входной вектор неизвестен, его матрица распределения принимается известной. На основе информации о матрице распределения, неизвестный вход (возмущение) может быть отделено от рассогласования. Надежная диагностика отказов, следовательно, выполняется с использование отделения рассогласований от возмущений. Проблема формирования надежного рассогласования может быть решена с использованием наблюдателя с неизвестным входом. В этом случае, рассогласование может быть так же отделено от каждого возмущения, так как рассогласование определяется как взвешенная ошибка оценки выхода.
Основными требованиями для наблюдателей при неизвестном входе или для других методов формирования надежного рассогласования является то, что матрица распределения неизвестного входа должна быть априорно известна, благодаря чему не нужно знать сам неизвестный вход. Если неопределенности вызваны возмущениями, то удовлетворить это требование достаточно легко и задача надежной диагностики отказов решается так же легко. Тем не менее, метод отделения возмущений не может быть прямо применен к системе, в которой неопределенности вызваны ошибками моделирования, ошибками линеаризации, вариациями параметров и т.д. Причиной этого является то, что матрица распределения возмущений обычно в этих случаях не известна. Эта проблема затрудняет использование этих надежных методов в диагностике отказов применительно к реальным промышленным системам. Для решения этой проблемы, некоторые исследователи советуют использовать метод оценки матрицы распределения.
2.4.1. Проектирование наблюдателей при неизвестном входе
Будем рассматривать такой класс систем, в котором неопределенности системы могут быть представлены в качестве неизвестной аддитивной составляющей, а динамические уравнения имеют такой вид:
 (2.50)
(2.50)
где ![]() - вектор состояния,
- вектор состояния, ![]() -
известный вектор входа,
-
известный вектор входа, ![]() -
вектор выхода и
-
вектор выхода и ![]() - вектор
неизвестного входа (или возмущения). A,B,C - известные матрицы соответствующих размерностей.
- вектор
неизвестного входа (или возмущения). A,B,C - известные матрицы соответствующих размерностей.
Составляющая Ed(t) может быть использована для описания как аддитивных возмущений так и для других видов моделируемых неопределенностей. Например, шума, составляющих связей в крупномасштабных системах, нелинейных составляющих в динамике системы, составляющих, возникающих из-за изменения во времени динамики системы, ошибок линеаризации и ошибок понижения порядка модели, вариаций параметров.
Определение 2.1. Наблюдатель называется наблюдателем при неизвестном входе для системы, описываемой уравнением (2.50), если вектор ошибки оценки состояния ex(t) асимптотически стремится к нулю, не смотря на наличие неизвестного входа (возмущения) в системе.
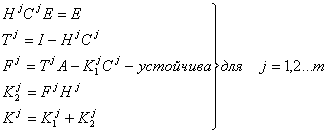
Структура наблюдателя полного порядка может быть представлена следующим образом:
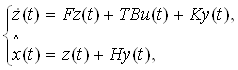 (2.52)
(2.52)
где ![]() - оцениваемый вектор
состояния, а
- оцениваемый вектор
состояния, а ![]() - вектор состояния этого
наблюдателя полного порядка, F, T, K, H – матрицы, которые необходимо спроектировать для
выполнения отделения неизвестного входа и других требований проектирования.
Наблюдатель, описываемый уравнениями (2.52) представлен на рисунке 2.18.
- вектор состояния этого
наблюдателя полного порядка, F, T, K, H – матрицы, которые необходимо спроектировать для
выполнения отделения неизвестного входа и других требований проектирования.
Наблюдатель, описываемый уравнениями (2.52) представлен на рисунке 2.18.
Когда
наблюдатель (2.52) проектируется для системы (2.51) ошибка оценки (ex(t) =![]() -
- ![]() ) удовлетворяет уравнению:
) удовлетворяет уравнению:
 (2.53)
(2.53)
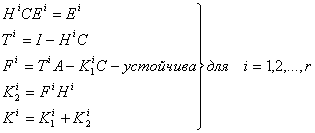
где К=К1+К2. (2.54)

Рис. 2.18. Структура наблюдателя при неизвестном входе полного порядка
Если выполняются следующие равенства:
![]() , (2.55)
, (2.55)
![]() , (2.56)
, (2.56)
![]() , (2.57)
, (2.57)
![]() , (2.58)
, (2.58)
то ошибка оценки будет:
![]() . (2.59)
. (2.59)
Если
все собственные числа F устойчивы, ex(t) будет асимптотически стремиться к
нулю, т.е. ![]() Это
означает, что наблюдатель (2.52), в соответствии с определением 2.1, является
наблюдателем при неизвестном входе для системы (2.51). Проектирование этого
наблюдателя заключается в решении уравнений (2.54)-(2.58) и выборе матрицы F так, чтобы все ее собственные числа
были устойчивы.
Это
означает, что наблюдатель (2.52), в соответствии с определением 2.1, является
наблюдателем при неизвестном входе для системы (2.51). Проектирование этого
наблюдателя заключается в решении уравнений (2.54)-(2.58) и выборе матрицы F так, чтобы все ее собственные числа
были устойчивы.
Теорема 2.1. Необходимыми и достаточными условиями существования наблюдателя (3.2) при неизвестном входе для системы описываемой уравнением (4.51) является:
1. ранг (CE) = ранг (E),
2. ( А1, С) является обнаруживаемой парой где
А1 = А – Е(СЕ)+СА. (2.62)
Стоит заметить, что для удовлетворения условия (1) теоремы 2.1 число независимых строк в матрице С должно быть меньше чем число независимых столбцов матрицы Е. Это означает, что максимальное количество возмущений, которые могут быть отделены не может быть больше чем число независимых измерений.
Кроме того, без неизвестных входов в системе, при установке T=I, H=0 и Е=0, наблюдатель (2.52) будет простым наблюдателем Люненбергера. В этом случае, условие (1) Теоремы 2.1 выполняется в любом случае, а условие (2) сводится к условию обнаруживаемости пары (А,С). Это – хорошо известный результат проектирования наблюдателя Люненбергера полного порядка.
Можно показать, что при проектировании наблюдателей при неизвестном входе К1 является матрицей свободных параметров. После вычисления К1 для того, чтобы обеспечить устойчивость матрицы динамической системы F, другие параметры матриц наблюдателя могут быть вычислены из соотношения К = К1+ К2 и условий (2.55)-(2.58). Некоторая свобода проектирования допускаемая при выборе К1 может быть использована, чтобы придать рассогласования необходимые проектировщику характеристики.
Процедура проектирования наблюдателя при неизвестном входе может быть представлена следующим образом:
1. Проверяем условие равенства рангов для Е и СЕ: если ранг(СЕ)≠ранг(Е) наблюдатель не существует, переходим к пункту 10.
2. Вычисляем матрицы H, T и A1:
![]() , (2.63)
, (2.63)
![]() , (2.64)
, (2.64)
![]() .
(2.65)
.
(2.65)
3. Проверяем наблюдаемость: если (С, А1) наблюдаема, то наблюдатель существует, а матрица K1 может быть вычислена с использованием метода расположения полюсов из условия обеспечения устойчивости матрицы F. Переходим к шагу 9.
4. Создаем матрицу преобразования P для выполнения канонического разложения наблюдателя: выбираем n1 = rank(W0) (W0 матрица наблюдаемости (C, A1)) независимых строчек p1T, …, pn1T из матрицы W0, вместе с другими n-n1 строками pn1+1T, …, pnT для формирования невырожденной матрицы :
P = [ p1, …, pn1 ; pn1+1, …, pn ]T (2.66)
5. Выполнить каноническое разложение (C, А1):
 ,
, ![]() .
(2.67)
.
(2.67)
6. Проверить обнаруживаемость (C, A1): если хотя бы одно собственное число A22 неустойчиво, наблюдатель с неизвестным входом не существует, переходим к шагу 10.
7. Выбрать n1 желаемых собственных чисел установить из выбором A11-Kp1C* c помощью размещения полюсов.
8. Вычислить:
K1= P-1Kp = P-1[(Kp1)T (Kp2)T]T (2.68)
где Kp2 может быть любой матрицей размерности (n-n1)*m.
9. Вычислить F и К:
F = A1-K1C, (2.69)
K = K1+K2 = K1+FH. (2.70)
10. Конец.
2.4.2. Схемы надежных выявления и изоляции отказов, основанные на наблюдателях при неизвестном входе
2.4.2.1. Схемы надежного выявления отказов, основанные на наблюдателях при неизвестном входе
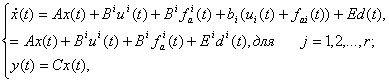
Основной задачей в надежном выявлении отказов является задача формирования сигналов рассогласований, устойчивых к неопределенностям системы. Система с возможными отказами датчиков и исполнительных механизмов может быть описана так:
 (2.71)
(2.71)
где fa – отказы исполнительных механизмов, fs - отказы датчиков. Для формирования надежного рассогласования (в смысле отделения возмущений) необходимо проектирование наблюдателя описываемого формулой (2.52). Если известна оценка состояния, то рассогласование может быть сформировано следующим образом:
![]() . (2.72)
. (2.72)
Когда формирование рассогласования осуществляется для системы с отказами (2.71):
 . (2.73)
. (2.73)
Из уравнения (2.73) видно, что воздействие возмущений отделено от рассогласования.
Чтобы выявить отказ исполнительного механизма необходимо сделать:
T B ≠ 0.
Отказ i-го исполнительного механизма будет воздействовать на рассогласование если и только если:
T bi ≠ 0.
где bi - i-ая колонка матрицы В.
Соответственно, чтобы выявить отказ датчика fs(t) необходимо сделать рассогласование чувствительным к этому отказу. Это условие обычно удовлетворяется так как вектор отказа датчиков fs(t) непосредственно воздействует на рассогласование. Надежное рассогласование может быть использовано для выявления отказов в соответствии с простой пороговой логикой:
 (2.74)
(2.74)
где Т- пороговое значение, устанавливаемое при отсутствии отказа.
Проблема изоляции отказов заключается в определении того, в каком датчике (или исполнительном механизме) произошел отказ. Как было описано ранее (см. пункт 2.7.2.) одним из методов выполнения изоляции является формирование структурированной совокупности рассогласований. Здесь термин «структурированный» означает, что каждое рассогласование проектируется чувствительным к определенной группе отказов и нечувствительным к другим. Свойства чувствительности и нечувствительности делают возможным изоляцию. В идеальной ситуации отдельное рассогласование чувствительно только к одному отказу и нечувствительно к другим. Однако, сформировать рассогласования таким образом достаточно трудно.
2.4.2.2. Схемы надежной изоляции отказов датчиков
Для проектирования схем надежной изоляции отказов датчиков предположим, что в системе присутствуют только отказы датчиков, тогда уравнения рассматриваемой системы могут быть описаны так:
 , (2.75)
, (2.75)
где сj Î R1 x n - j-ая строка матрицы С, С j Î R(m-1) x n - определяется удалением j – ой строки сj из матрицы С, yj - j-ый компонент у и yj Î Rm-1– определяется удалением j-го компонента yj из вектора у.
На основе этого описания, формирование рассогласования на основе наблюдателя при неизвестном входе может быть выполнено следующим образом:
 (2.76)
(2.76)
где параметры матриц должны удовлетворять следующим уравнениям:
 . (2.77)
. (2.77)
Каждый генератор рассогласования приводится в действие всеми входами и всеми, за исключением одного выходами. При отсутствии отказов ИМ, когда отказ возникает в j-ом датчике рассогласование будет:
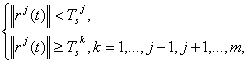 (2.78)
(2.78)
где Ts – пороговые значения рассогласований. Схема изоляции отказов датчиков изображена на рисунке 2.19.
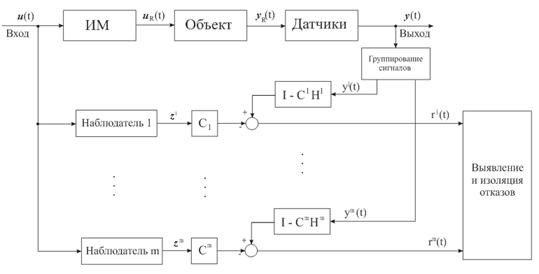
Рис. 2.19. Схема надежной изоляции отказов датчиков
2.4.2.3. Схема надежной изоляции отказов исполнительных механизмов
Для проектирования схем надежной изоляции отказов датчиков предположим, что в системе присутствуют только отказы исполнительного механизма, тогда уравнения рассматриваемой системы могут быть описаны так:
 , (2.79)
, (2.79)
где bi Î R n - i-ый столбец матрицы B, BiÎ Rn x (r-1) - определяется удалением i – ой колонки bj из матрицы B, uj - i-ый компонент u и ui Î Rr-1– определяется удалением i-го компонента ui из вектора u,
 .
.
На основе этого описания, формирование рассогласования на основе наблюдателя при неизвестном входе может быть выполнено следующим образом:
 (2.80)
(2.80)
Параметры матриц должны удовлетворять следующим уравнениям:
 . (2.81)
. (2.81)
Каждый генератор рассогласования приводится в действие всеми выходами и всеми, за исключением одного входами. При отсутствии отказов датчиков, когда отказ возникает в i-ом исполнительном механизме рассогласование будет:
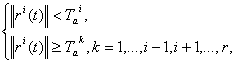 (2.82)
(2.82)
где Ta – пороговые значения рассогласований. Схема изоляции отказов датчиков изображена на рисунке 2.20.
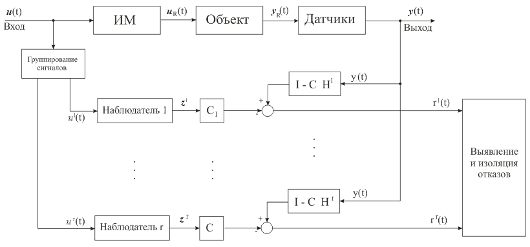
Рис. 2.20. Схема изоляции отказов исполнительного механизма
2.5. Нейронные сети в диагностике отказов
Нейронная сети в диагностике могут использоваться как для выявления, так и для изоляции отказов нелинейных динамических процессов.
Нейронная сеть может использоваться как модель системы. После обучения сети, с ее помощью можно получить очень точную оценку выхода системы. В соответствии с концепцией формирования рассогласования, при использовании нейронной сети для оценки выхода системы, рассогласование может быть получено как взвешенная разность между реальным и оцененным выходами процесса. При превышении величины этого рассогласования установленного порогового значения можно сказать, что в системе произошел отказ. Такие рассогласования не являются независимыми от динамики системы.
Для выполнения изоляции отказов можно использовать вторую нейронную сеть, которая будет анализировать особенности рассогласований для различных отказов. Построенная на основе принципа анализа свойств или принципа классификации эта нейронная сеть может достоверно изолировать отказы.
Нейронные сети как классификаторы. После формирования рассогласования необходимо определить какой отказ произошел. Обычно принятие решения осуществляется с помощью пороговой логики. Основной задачей принятия решения является классификация рассогласований в различимые образцы, соответствующие различным ситуациям отказов. Следовательно, принимать решение можно на основе принципа распознавания образцов. Распознавание образцов так же включает в себя обработку входных данных.
Входные образцы называют измерениями или вектором особенностей (свойств). Функция, выполняемая системой распознавания образцов, состоит в отображении входного вектора особенностей в один из классов решений. В диагностике отказов, этими классами решений являются различные типы отказов, возникающих в системе. Основное преимущество нейронных сетей – их способность разбиения пространства образцов с целью классификации. Следовательно, нейронные сети могут быть использованы как классификаторы для разделения образцов рассогласований и формирования сигналов тревог. Таким образом, они могут выявлять и изолировать отказы.
3. Диагностика отказов системы регулирования уровня жидкости в баке
3.1. Постановка задачи
Реализацию описанного выше метода диагностики отказов, основанного на моделях будем выполнять применительно к системе регулирования процессом экстракции (рисунок 3.1).

Рис.3.1. Система регулирования
Рассматриваемая система состоит из регулятора, исполнительного механизма, объекта и датчиков.
В качестве объекта автоматизации рассматриваем процесс жидкостной экстракции, осуществляемый в смесителях-отстойниках. Смесители-отстойники представим упрощенно в виде двух соединенных между собой баков, изображенных на рисунке 3.2.
В бак 1 поступает жидкость (вода) с известным расходом Q1. Уровень во втором баке необходимо регулировать в соответствии с заданием. Регулирование осуществляется за счет изменения вытекающего из второго бака потока Q3. Поток Q3 изменяется задвижкой, управляемой электроприводом на базе асинхронного двигателя. Величина уровня h2 измеряется датчиком.
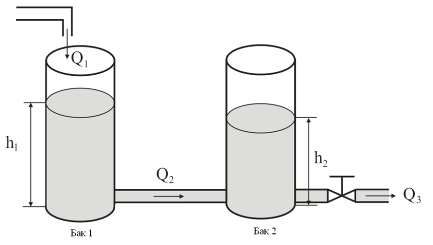
Рис. 3.2. Система двух баков
Необходимо выполнить диагностику отказов элементов этой системы регулирования.
Следовательно, необходимо, на основе рассмотренного выше метода аналитической избыточности, спроектировать систему диагностики отказов, которая бы позволяла выявить и изолировать отказы датчиков, исполнительных механизмов и объекта управления.
3.2. Моделирование элементов системы и отказов
Для решения поставленной задачи в первую очередь необходимо создать модель системы, позволяющую имитировать поведение рассматриваемого процесса. Данная модель так же должна включать модели возможных отказов элементов системы регулирования.
3.2.1. Модель объекта управления
Рассматриваемая система баков (рисунок 3.2) может быть описана следующими уравнениями.
Уравнения материального баланса для баков 1 и 2 имеют вид:
![]() , (3.1)
, (3.1)
![]() , (3.2)
, (3.2)
где S1 = S2 = S = 0.049 м2 – площадь основания цилиндрических баков.
Расход через трубу, соединяющую баки, в соответствии с законом Торичелли определяется по формуле:
![]() , (3.3)
, (3.3)
где ![]() ,
, ![]() - давление воды в 1 и 2 баках
соответственно,
- давление воды в 1 и 2 баках
соответственно,
γ = 9800 Н/м3 - удельный вес воды,
К1 – коэффициент пропускной способности трубы, соединяющей баки равный K1 = 0.05 м3/час.
Расход через вентиль:
![]() , (3.4)
, (3.4)
где К2 – коэффициент пропускной способности вентиля. К2 регулируется задвижкой и зависит от ее положения – х:
К2(х) = 10∙Кmax∙ х . (3.5)
Максимальная пропускная способность вентиля принимается равной
Кmax=0.1 м3/час.
По полученным уравнениям составим модель системы в переменных состояния:
![]() , (3.6)
, (3.6)
![]() ,
, ![]() (3.7)
(3.7)
В качестве переменных
состояния будем рассматривать уровни жидкости в баках h1 и h2, входами будем считать расходы ![]() и положение задвижки x:
и положение задвижки x:
 ,
,  .
(3.8)
.
(3.8)
Таким образом, получим:
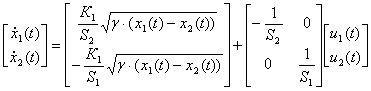 (3.9)
(3.9)
Данная модель является нелинейной.
3.2.2. Модель исполнительного механизма
В качестве исполнительного механизма рассматриваем трехфазный асинхронный двигатель, передаточная функция которого при частотном управлении имеет вид:
![]() (3.10)
(3.10)
где Ким = 1 – коэффициент усиления , T = TМ – электромеханическая постоянная времени двигателя, определяемая следующим образом:
![]() =0,0396 сек, (3.11)
=0,0396 сек, (3.11)
где J=0.0081 кг ∙ м2 – момент инерции ротора,
ω0 = 2 ∙ 3,14 ∙ 50 = 314 рад/сек - синхронная частота,
SМ = 0.4371 – максимальное скольжение,
Ммах = 2,8025 Н ∙ м – максимальный электромагнитный момент.
3.2.3. Моделирование датчиков
Для измерения уровня жидкости в баке 2 используется датчик уровня. По причине того, что при его моделировании не будем учитывать динамические свойства датчика, его модель может быть описана в качестве передаточной функции вида:
Ws2(s) = 1. (3.12)
Для измерения положения задвижки так же используем датчик. Он описывается так же передаточной функцией вида:
Wsх(s) = 1. (3.13)
В соответствии с техническим заданием, уровень жидкости в первом баке датчиком не измеряется. Однако, в дальнейших исследованиях необходима информация об этом сигнале. Поэтому, для восстановления этой не измеряемой величины будем использовать виртуальный датчик – наблюдатель состояния.
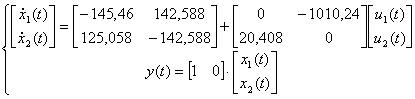
Спроектируем наблюдатель состояния для системы двух баков. Для этого воспользуемся описанием системы баков в переменных состояния (3.9). Для линейной динамической модели:
(3.14)
где ![]() ,
, ![]() ,
, ![]() для воссоздания переменных
системы на основе измерений входов и выходов используется наблюдатель состояния:
для воссоздания переменных
системы на основе измерений входов и выходов используется наблюдатель состояния:
![]() . (3.15)
. (3.15)
Система (3.9) является нелинейной, поэтому для оценки ее состояния можно построить нелинейный наблюдатель следующего вида:
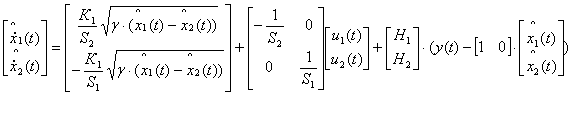 . (3.16)
. (3.16)
Для выбора коэффициентов обратной связи наблюдателя H необходимо выполнить линеаризацию в некоторой рабочей точке. Например, для точки
h1-h2 = 0.16357,м линеаризованная модель для (3.9) будет иметь следующий вид:
 . (3.17)
. (3.17)
Коэффициенты матрицы Н выберем исходя из условия обеспечения устойчивости наблюдателя и с учетом, того, что наблюдатель должен обладать более высоким быстродействием, чем система.
 .
.
2.одель регулятора
3.2.5. Моделирование отказов
1. Отказ исполнительного механизма
Данный отказ будем моделировать как внезапное изменение коэффициента усиления исполнительного механизма в соответствии с уравнением:
КИМ = (1+δИМ)КИМ0, (3.20)
где δИМ - величина отказа, изменяемая в пределах {-1…1}. δИМ = 0 соответствует безотказному режиму работы.
2. Отказы датчиков
Данный тип отказов проявляется во внезапном возникновении отклонений показаний датчика от действительных значений, измеряемой величины. Моделирование осуществляется в соответствии с уравнением:
![]() , (3.21)
, (3.21)
где yR – действительное значение измеряемой величины, y – значение величины, полученное датчиком, δS - величина отказа датчика.
Будем рассматривать следующие отказы датчиков: - датчик уровня, измеряющий h2; - датчик положения задвижки.
Величины отказов датчиков определяются следующим образом:
δS1 = {-1…1}, (3.22)
δS3 = α∙t. (3.23)
3. Отказы объекта управления
Будем рассматривать следующие отказы объекта управления:
1) отверстие в баке 1
Отказ моделируется как дополнительный расход, за счет которого уменьшается уровень в баке 1 в соответствии с уравнениями:
![]() ,
, ![]() (3.24)
(3.24)
где Kfmax=0.5 м3/час – максимально возможный поток через отверстие.
Данный отказ может быть рассмотрен как внезапный и зарождающийся. В первом случае величина отказа dО1 измеряется в пределах {0…1}. dО1 = 0 соответствует безотказному режиму работы, dО1 = 1 – максимальной величине отверстия. Во втором случае величина отказа изменяется со скоростью αО1:
dО1 = αО1∙t. (3.25)
2) отказ задвижки
Отказ моделируется как дополнительный поток через задвижку в соответствии с уравнением:
![]() ,
, ![]() (3.26)
(3.26)
где Kfmax=1 м3/час – максимально возможный поток задвижку, dОУ2 = {0…1} - величина отказа.
Данный отказ так же может быть рассмотрен как внезапный и зарождающийся. При внезапном отказе величина dО2 измеряется в пределах {0…1}. dО2 = 0 соответствует безотказному режиму работы, dО2 = 1 соответствует максимальному потоку через задвижку в закрытом положении. При зарождающемся отказе:
dО2 = αО2∙t. (3.27)
3.3. Проектирование системы диагностики отказов
3.3.1. Описание системы с отказами
Для решения поставленной задачи первоначально необходимо спроектировать формирователь рассогласования и блок оценки рассогласований.
Для этого все полученные модели рассмотрим в совокупности и получим общее описание системы с отказами.
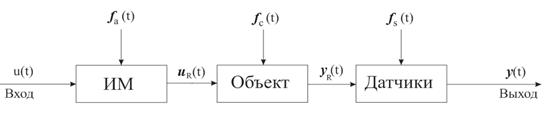
Рис. 3.3. Система и воздействующие на нее отказы
На вход исполнительного механизма поступает известный сигнал от контроллера u(t). Сигнал uR(t) - управляющее воздействие от исполнительного механизма, поступает на вход объекта управления. Выходной сигнал объекта управления yR(t) непосредственно не доступен и измеряется с помощью датчиков.
Таким образом для целей диагностики известными принимаются входные и выходные векторы системы:
u(t) – известный вход исполнительного механизма;
y(t) – измеряемый датчиками выход системы.
С учетом рассмотренных моделей элементов системы (см. (3.9) – объект управления, (3.11) – исполнительный механизм, (3.12), (3.13), (3.14) - датчики) получим следующее математическое описание системы в переменных состояния:
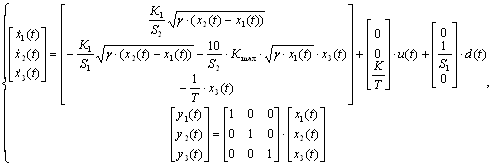 (3.28)
(3.28)
где ![]() ,
, ![]() - входной вектор системы –
сигнал управления, поступающий с контроллера на вход исполнительного механизма,
- входной вектор системы –
сигнал управления, поступающий с контроллера на вход исполнительного механизма,
![]() - выходной вектор системы,
- выходной вектор системы,
![]() - возмущающее воздействие.
- возмущающее воздействие.
В качестве возмущающего воздействия рассматривается поток жидкости поступающий в первый бак:
d(t)= Q1(t), м3/час. (3.29)
Вектор состояния системы описывается следующим образом:
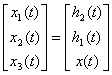 , (3.30)
, (3.30)
где h2(t) – уровень во втором баке, м;
h1(t) – уровень в первом баке, м;
х(t) – положение задвижки, м.
Как указывалось выше, в соответствии с выбранным методом формирования рассогласования необходимо использование линейной модели системы. Поэтому, выполним линеаризацию системы (3.26) в какой-либо рабочей точке.
Для разности уровней в баках h1-h2 = 0.16357,м с помощью программы Vissim 5.0, была получена следующая линейная модель:
![]() (3.31)
(3.31)
где 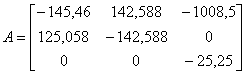 ,
,  ,
,  ,
, 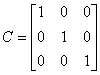 .
.
Данная линейная модель, содержащая внешнее возмущение может быть использована при проектировании рассогласований на основе наблюдателей при неизвестном входе. При использовании наблюдателей состояния необходимо использовать описание системы в форме, не содержащей неизвестных составляющих. В этом случае будем полагать, что поток жидкости, поступающий в первый бак является известной величиной, входящей в вектор управления. Тогда линейная система будет иметь следующий вид:
![]() (3.32)
(3.32)
где, 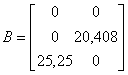 ,
, ![]() . Входной вектор системы содержит
сигнал управления с контроллера – uk(t) и поток Q1(t):
. Входной вектор системы содержит
сигнал управления с контроллера – uk(t) и поток Q1(t):
 . (3.33)
. (3.33)
Когда в системе действуют все рассматриваемые отказы датчиков, компонентов и исполнительного механизма, ее модель (3.29) может быть представлена следующим образом:
 (3.34)
(3.34)
где ![]() -
вектор отказа датчиков,
-
вектор отказа датчиков, ![]() ,
, ![]() - векторы отказов
компонентов системы, описывающие утечку в баке и отказ задвижки соответственно,
- векторы отказов
компонентов системы, описывающие утечку в баке и отказ задвижки соответственно,
![]() - вектор отказа
исполнительного механизма.
- вектор отказа
исполнительного механизма.
Рассмотрим математическое описание векторов, введенных в систему отказов.
Отказы датчиков. В соответствии с уравнением (3.19) датчики подвержены
мультипликативным отказам, при которых измерение становится ![]() , а i-ая составляющая вектора отказов
может быть переписана так
, а i-ая составляющая вектора отказов
может быть переписана так ![]() =
=![]() .
.
Таким образом вектор отказов имеет вид:
 , (3.35)
, (3.35)
где величины отказов δsi для датчиков определяются по формулам (3.20), (3.21):
δs1={-1…1}, δs3= α∙t.
Отказы компонентов системы. В данном случае в качестве отказа компонентов системы рассматриваются протечка в баке 1 и отказ задвижки. В результате этих отказов нарушаются динамические отношения в системе: независимо от входного потока жидкости Q1 и положения задвижки х в установившемся режиме происходит изменение уровней жидкости в баках. Вектора отказов компонентов системы в соответствии с формулами (3.22)-(2.25) могут быть представлены следующим образом:
 ; (3.36)
; (3.36)
 . (3.37)
. (3.37)
Отказ исполнительного механизма. Отказ исполнительного механизма, моделируемый в соответствии с уравнением (3.10), связан с изменением параметров системы, и, следовательно, является мультипликативным. Данный отказ может быть описан следующим образом:
 . (3.38)
. (3.38)
Система со всеми отказами может быть описана с помощью общего вектора отказов f(t):
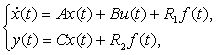 (3.39)
(3.39)
где вектор отказов и матрицы распределения отказов имеют следующий вид:
 ,
,
 ,
,  .
.
Запишем данную систему с отказами с помощью передаточных функций:
![]() , (3.40)
, (3.40)
где
 (3.41)
(3.41)
Получим численные значения данных передаточных матриц для рассматриваемой линеаризованной системы с отказами (4.96):
 , (3.42)
, (3.42)
где
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
 , (3.43)
, (3.43)
где ![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
3.3.2. Моделирование отказов в Vissime
При моделировании в качестве имитатора реальной системы будем использовать ее нелинейную модель с дополнительно введенными в нее отказами датчиков, исполнительного механизма и объекта управления. Данная модель, созданная в Vissim 5.0 представлена в приложении В.
При моделировании устанавливаются следующие значения вектора входа и начальные значения состояния (3.26):
![]() ,
,  .
.
Моделирование проводим на временном интервале соответствующем 4 часам.
Рассмотренные типы отказов вводятся в систему по отдельности в момент времени t=2 часа:
1. Отказ датчика уровня h2 : y1(t)=(1-0.2) ∙yR1(t), t>2 часов.
2. Отказ датчика положения х: y3(t)=[1+0.2∙sin(10(t-2))]∙yR3(t), t>2 часов.
3. Утечка в баке 1:
![]() ,
, ![]() ,t>2 часов.
,t>2 часов.
![]() ,
, ![]() ,t>2 часов.
,t>2 часов.
4. Отказ задвижки:
![]() ,
, ![]() , t>2 часов.
, t>2 часов.
![]() ,
, ![]() , t>2 часов.
, t>2 часов.
5. Отказ исполнительного механизма: uR1(t)=(1+0.2) ∙u1(t), t>2 часов.
Результаты моделирования отказов представлены на рисунках (3.4) – (3.12).
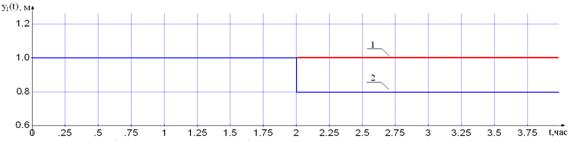
Рис. 3.4. Сигнал y1(t): 1- без отказа, 2 - при отказе датчика уровня h2.

Рис. 3.5. Сигнал y3(t): 1- без отказа, 2 - при отказе датчика положения х.
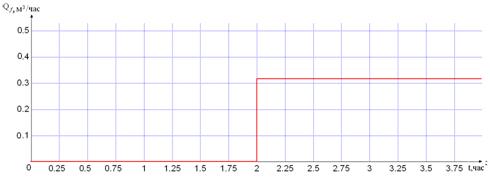
Рис. 3.6. Дополнительный поток Qf1(t) – утечка в баке 1 (внезапный отказ)
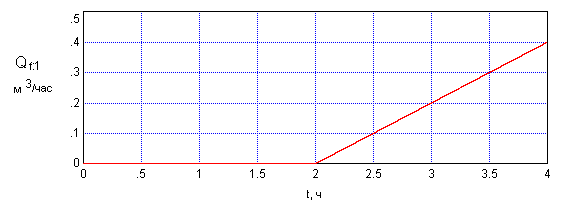
Рис. 3.7. Дополнительный поток Qf1(t) – утечка в баке 1 (зарождающийся отказ)
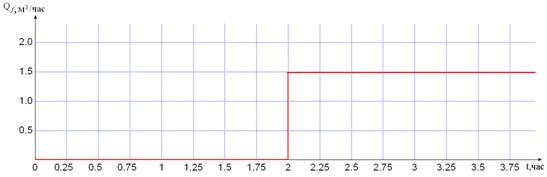
Рис. 3.8. Дополнительный поток Qf2(t), обусловленный отказом задвижки (внезапный отказ)
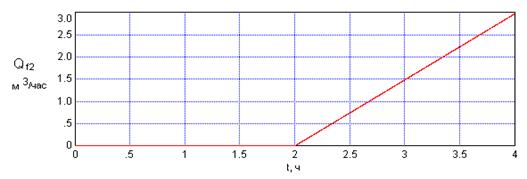
Рис. 3.9. Дополнительный поток Qf2(t), обусловленный отказом задвижки
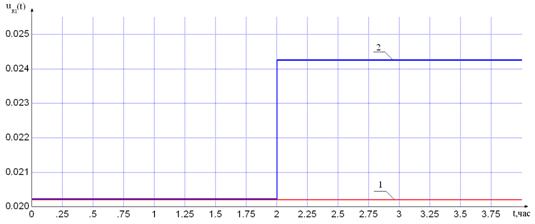
Рис. 3.10. Сигнал uR(t): 1 – без отказа, 2 – при отказе исполнительного механизма
3.3.3. Диагностика отказов с помощью наблюдателей состояния
Для решения задачи диагностики с помощью данных наблюдателей будем использовать описание системы с отказами в форме (3.39).
3.3.3.1. Выявление отказов
Для решения задачи выявления отказов выполним формирование рассогласования. Формирование рассогласования будем осуществлять с помощью наблюдателей состояния (см. пункт 2.3.8).
Структура формирователя рассогласования ( рисунок 2.11) математически описывается формулой (2.11):
![]() .
.
Спроектируем формирователь рассогласования.
Чтобы определить структуру наблюдателя, рассмотрим исследуемую систему в форме (3.26) без отказов f(t)=0.
Для воссоздания переменных системы на основе измерений входов и выходов используется наблюдатель состояния, описываемый следующим образом:
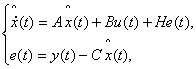 (3.44)
(3.44)
где ![]() ,
, ![]() , матрицы А,В,С равны
матрицам системы (3.26).
, матрицы А,В,С равны
матрицам системы (3.26).
При проектировании данного наблюдателя выберем параметры матрицы Н из условия обеспечения его устойчивости. Кроме того, при выборе Н учтем, что наблюдатель должен обладать большим быстродействием чем система, переменные состояния которой он восстанавливает. Выберем следующую матрицу Н:
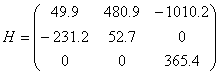 .
.
В качестве рассогласования (пункт 2.3.8) можно использовать взвешенную величину ошибки оценки входа (We(t)). Пусть матрица весовых коэффициентов рассогласования равна W=I, тогда получим следующий формирователь рассогласования r(t):
 (3.45)
(3.45)
где, ![]() , , , .
, , , .
Определим требуемые передаточные функции Hu(s) и Hy(s).
Применим преобразование Лапласа к (3.56), полагая при этом, что x(s)|s=0 = 0:
 (3.46)
(3.46)
Подставив уравнение ошибки e(s) в уравнение состояния (3.58) получим:
![]() . (3.47)
. (3.47)
С учетом формулы (3.43) и того, что r(s)=We(s) получим:
 . (3.48)
. (3.48)
Передаточная матрица Hy(s) имеет следующий вид:
 , (3.49)
, (3.49)
где ![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Передаточная матрица Hu(s) может быть получена следующим образом:
![]() , (3.50)
, (3.50)
![]() (3.51)
(3.51)
Проверим, выявляемы ли все рассматриваемые отказы.
Выявляемость отказов
Зная структуру формирователя рассогласования на основе наблюдателя состояния, проверим условие выявляемости отказов вектора f(t).
Реакция вектора рассогласования на возникающий отказ определяется по формуле (2.15). В данном случае:
![]() . (3.52)
. (3.52)
Для
того, чтобы выявить i-ый
отказ fi в рассогласовании r(s), i-ая
колонка ![]() передаточной матрицы
передаточной матрицы ![]() должна быть не равна нулю
должна быть не равна нулю ![]() ≠ 0.
≠ 0.
Очевидно,
что передаточная матрица ![]() не
содержит нулевых колонок, поэтому каждый из рассматриваемых отказов датчиков,
исполнительного механизма и объекта управления выявляем в рассогласовании r(t).
не
содержит нулевых колонок, поэтому каждый из рассматриваемых отказов датчиков,
исполнительного механизма и объекта управления выявляем в рассогласовании r(t).
Кроме того, для всех отказов так же выполняется и строгое условие выявляемости:
![]() ≠ 0, i=1…4, (3.53)
≠ 0, i=1…4, (3.53)
так как  не содержит нулевых столбцов.
не содержит нулевых столбцов.
Таким образом, для выявления всех рассматриваемых отказов достаточно построить формирователь рассогласования с рассмотренной выше структурой (3.57). При воздействии на систему (3.26) любого из отказов вектора f(t) рассогласование r(t)= e(t) будет иметь следующий вид:
![]() , (3.54)
, (3.54)
где ошибка оценки состояния изменяется в соответствии с формулой:
![]() . (3.55)
. (3.55)
Таким образом, ошибка оценки e(t) будет равна нулю только при отсутствии отказов.
Полученный формирователь рассогласования изображен на рисунке 3.11.
Выявление сигналов отказов выполним сравнением сигнала рассогласования с фиксированным порогом, устанавливаемым при отсутствии отказов:
![]() ,
, ![]() . (3.56)
. (3.56)
Пороговые значения для рассогласования, представлены в таблице 3.1.
Таблица 3.1.
Пороговые значения выявления отказов
|
T1 |
T2 |
T3 |
| 2e-7 | 1e-8 | 1e-16 |
Рис. 3.11. Выявление отказов с помощью наблюдателя состояния
Моделирование
Моделирование выполняем для рассмотренных в 3.3.2 отказов. Начальные условия для формирователя рассогласования (3.57) установим равными:
 .
.
Реакции рассогласования r(t) на соответствующие отказы изображена на рисунках (3.12) – (3.16).
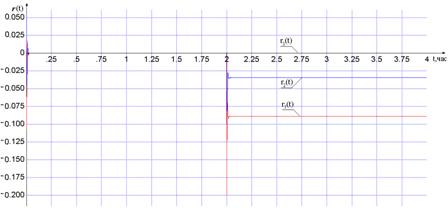
Рис.3.12. Рассогласования при отказе датчика уровня h2
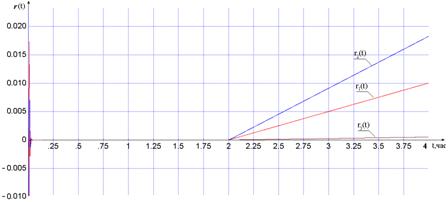
Рис.3.13. Рассогласования при отказе датчика положения х
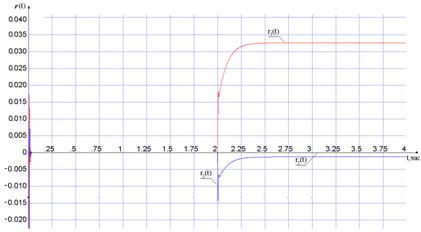
Рис.3.14. Рассогласования при утечке в баке 1
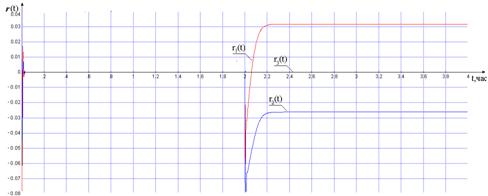
Рис. 3.15. Рассогласования при отказе задвижки
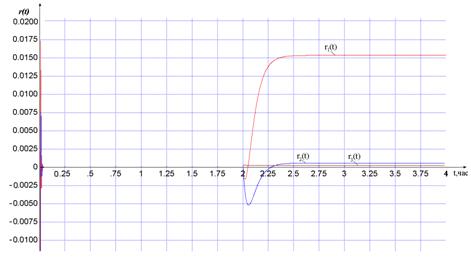
Рис.3.16. Рассогласования при отказе исполнительного механизма
Как видно из рисунков, рассогласования при отсутствии отказов близки к нулю, а при возникновении любого из отказов значительно увеличиваются. Таким образом, выполняется выявление отказов с помощью наблюдателя состояния. Из рисунков так же видно, что выявление отказов с помощью наблюдателей происходит практически без временной задержки, что является существенным преимуществом их использования.
3.3.4.2. Изоляция отказов
После выявления отказов необходимо выполнить их изоляцию.
Для выявления отказов достаточно одного рассогласования. В нашем случае это рассогласования было получено с помощью формирователя рассогласования на основе наблюдателя состояния. Однако, для изоляции отказов одного рассогласования не достаточно.
Как было описано ранее, с помощью наблюдателей можно выявлять возникающие в системе отказы датчиков и исполнительных механизмов. Сформируем группу рассогласований для изоляции отказов датчиков.
Изоляция отказов датчиков
При условии, что в системе присутствуют только отказы датчиков, выход системы может быть задан следующим образом:
Если нам необходимо выявить только отказы датчиков, то выход системы может быть задан так:
y(s) = Gu(s)u(s) + fs(s), (3.57)
где Gu(s) определяется по (3. ), fs(s) - s-преобразование вектора отказов датчиков:
 . (3.58)
. (3.58)
Необходимо спроектировать совокупность сигналов рассогласования, которая позволяла бы изолировать отказы каждого датчика. Для этого, в соответствии с пунктом 2.3.6 можно использовать различные схемы изоляции отказов. Рассмотрим возможность использования схемы наблюдателей Франка. В соответствии с этой схемой, в данном случае, необходимо спроектировать два сигнала рассогласований каждое из которых будет нечувствительно только к одному из отказов датчиков ( отказу датчика уровня h2 или отказу датчика положения х).
Спроектируем сигнал рассогласования чувствительный к отказу первого датчика fs1(s) = [fs1(s); fs2(s)] и не чувствительный к отказу датчика положения fs2(s). Перепишем уравнение (4.69) так:
 , (3.59)
, (3.59)
где y1(s) = [y1(s); y2(s)], y2(s) = y3(s), fs2(s) = fs3(s).
Тогда генератор рассогласования примет следующий вид:
rs1(s) = [rs11(s); rs12(s)] = Hu1(s) u(s)+ Hy1(s)y1(s). (3.60)
При подстановке y1(s) в это уравнение получим:
rs1(s) = [Hu1(s) + Hy1(s)Gu(s)]u(s) + Hy1(s)fs1(s). (3.61)
Рассогласование будет чувствительно только к отказу fs1(s), когда матрицы передаточной функции генератора рассогласования будут удовлетворять следующим условиям:
 (3.62)
(3.62)
Для
рассматриваемой системы (3.26) ![]() . При
использовании наблюдателя состояния передаточная матрица(см. (3.60)):
. При
использовании наблюдателя состояния передаточная матрица(см. (3.60)):
связывающая рассогласование и 1 и 2 выходы системы в соответствии с (3.63) так:
![]() , (3.64)
, (3.64)
где С1 – матрица С , из которой исключена 3 строка, Н1 – соответствующий вектор обратной связи наблюдателя состояния. Следовательно, передаточная матрица Hu1(s) будет иметь вид:
![]() . (3.65)
. (3.65)
При проектировании рассогласования таким образом может быть изолирован отказ первого датчика. Из этих формул видно, что для этого необходимо спроектировать наблюдатель состояния, запускаемый всеми входами системы и всеми, за исключением одного у3(t) выходами. Формирователь рассогласования, построенный на основе такого наблюдателя будет иметь вид:
 (3.66)
(3.66)
После расчета коэффициентов обратной связи наблюдателя Н1 из условия обеспечения его устойчивости получим следующий формирователь рассогласования:
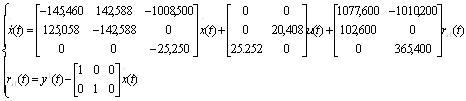 , (3.67)
, (3.67)
Аналогичным образом определяется формирователь рассогласования позволяющий изолировать отказ датчика положения:
 , (3.68)
, (3.68)
Таким образом, с помощью полученной совокупности рассогласований {rs1(t), rs3(t)} выполняется изоляция отказов датчиков: каждое рассогласование не чувствительно только к соответствующему отказу датчика т.е. оно близко к нулю при соответствующем отказе, и больше некоторого порогового значения при отказе другого датчика.
Следует отметить, что в данном случае формируются вектора рассогласования rs1(t)=[ rs11(t); rs12(t)] и rs3(t)=[ rs31(t); rs32(t)]. Для выполнения выявления отказов достаточно использовать по одному из элементов данных векторов. Выберем в качестве рассогласований:
rs1(t)=rs12(t)=y2(t)-![]() . (3.69)
. (3.69)
rs3(t)=rs31(t)=y1(t)-![]() . (3.70)
. (3.70)
Пороговые значения для рассогласований представлены в таблице 3.2. Схема изоляции отказов датчиков представлена на рисунке 3.17. Сигнатуры рассогласований при различных отказах датчиков приведены в таблице 3.3, реакции рассогласований на отказы датчиков изображены на рисунках 3.18, 3.19.
Таблица 3.2.
Пороговые значения рассогласований
|
Ts1 |
Ts3 |
| 3e-8 | 1.1e-8 |
Таблица 3.3.
Сигнатуры рассогласований
|
Отказ |
rs1 |
rs3 |
|
fs1 – датчик уровня h2 |
0 | 1 |
|
fs3 – датчик положения задвижки |
1 | 0 |
Значение «1» в таблице 3.3 означает превышение рассогласованием соответствующего порогового значения.
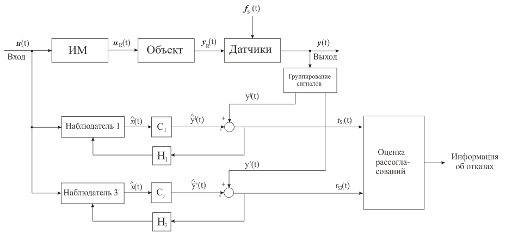
Рис. 3.17. Схема изоляции отказов датчиков
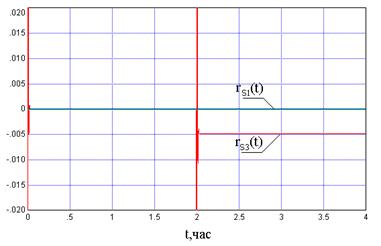
Рис. 3.18. Рассогласования при отказе датчика уровня h2
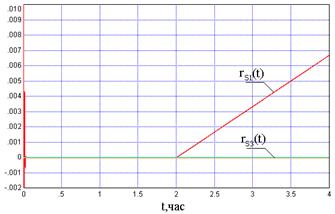
Рис. 3.19. Рассогласования при отказе датчика положения
Изоляция отказа исполнительного механизма
Для изоляции отказа исполнительного механизма будем использовать дополнительный наблюдатель состояния (рисунок 3.20). Спроектируем формирователь рассогласования. Представим описание модели исполнительного механизма (2.10) в переменных состояния:
 (3.71)
(3.71)
Наблюдатель состояния в этом случае будет иметь вид:
 (3.72)
(3.72)
а формирование рассогласования будет осуществляться следующим образом:
 (3.73)
(3.73)
Сигнал о положении задвижки получаем с помощью датчика положения, вероятность возникновения отказа fs3 в котором так же необходимо учитывать. Таким образом, в соответствии с формулами (2.41), (2.42), (2.44) рассогласование ra(t) будет реагировать на эти два отказа:
 . (3.74)
. (3.74)
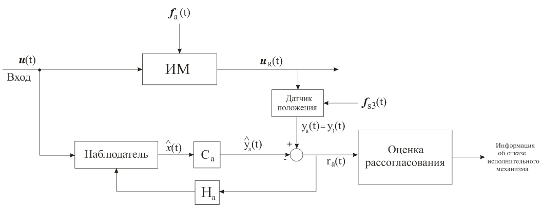
Рис. 3.20. Изоляция отказа исполнительного механизма
Пороговое значение для сигнала рассогласования Ta = 6e-17. При отказе исполнительного механизма или датчика положения это рассогласование будет превышать пороговое значение, сигнализируя об отказе. (см. рисунки 3.21, 3.22).
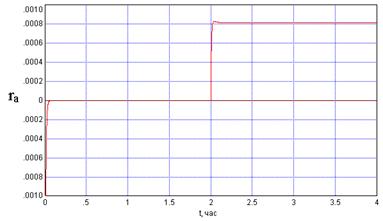
Рис. 3.21. Рассогласование ra(t) при отказе исполнительного механизма
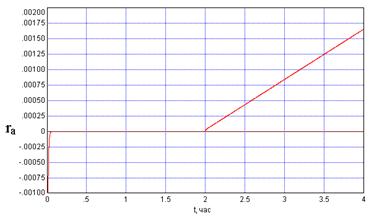
Рис. 3.22. Рассогласование ra(t) при отказе датчика положения
Изоляция отказов элементов системы
Таким образом, с помощью наблюдателей состояния мы получили шесть сигналов рассогласования: r1, r2, r3 – формирователь (3.67), rs1, rs2 - формирователи (3.78) и (3.79), ra – формирователь (3.83). Для построения системы диагностики, позволяющий изолировать все рассматриваемые отказы, необходимо рассматривать все эти рассогласования совместно. Как видно из рисунков (3.12)-(3.16) рассогласования r1, r2, r3 реагируют на все возможные отказы в системе, rs1, rs3 так же будут чувствительны ко всем отказам, а rа сформировано таким образом, чтобы реагировать только на отказ исполнительного механизма и датчика положения.
Реакции этих рассогласований на все рассматриваемые отказы представлены в таблице 3.4. В таблице значение «0» соответствует отсутствию реакции рассогласования на отказ, «1» - рассогласование чувствительно к отказу.
Таблица 3.4.
Сигнатуры рассогласований при различных отказах
|
Отказы |
fs1 |
fs3 |
fc1 |
fc2 |
fa |
|
r1 |
1 | 1 | 1 | 1 | 1 |
|
r2 |
1 | 1 | 1 | 1 | 1 |
|
r3 |
0 | 1 | 0 | 0 | 1 |
|
rs1 |
0 | 1 | 1 | 1 | 1 |
|
rs3 |
1 | 0 | 1 | 1 | 1 |
|
ra |
0 | 1 | 0 | 0 | 1 |
Из таблицы видно, что по сформированным рассогласованиям можно изолировать отказы исполнительного механизма, датчика уровня h2, датчика положения задвижки и отказы системы.
Однако реакция рассогласований на отказы объекта управления (утечка в баке и отказ задвижки) одинакова. С помощью полученных рассогласований изолировать эти отказы невозможно и для выполнения этой задачи необходимо использовать другую методику.
Изоляция отказов объекта управления
В соответствии с пунктом 2.5 для решения поставленной задачи будем использовать нейронную сеть.
Выберем двухслойную нейронную сеть с прямыми связями. Сеть будет иметь 3 входа(рассогласования r1, r2, r3) и 2 выхода. Функции активации нейронов сети установим логарифмическими сигмоидальными. Для обучения используем алгоритм с обратным распространением ошибки Левенберга-Маккварта.
Эта нейронная сеть будет классифицировать образцы рассогласований r1, r2, r3 в соответствии с типом отказа (утечка в баке или отказ задвижки).
Для обучения сети проводится ряд экспериментов: на модели имитаторе системы устанавливаются различные значения величин отказов δc1 и δc2 в диапазоне их изменения, получаемые при этом установившиеся значения рассогласований r1, r2, r3 запоминаются и затем используются в качестве образцов для обучения сети. Кроме того, обучение сети так же проводится на образцах, соответствующих безотказному режиму работы системы.
Построенная сеть имеет два выходных сигнала. Устанавливается, что выходные значения этих сигналов могут изменяться в пределах от 0 до 1. Значение близкое к «0» соответствует отсутствию отказа, значение «1» - отказу. Если на обоих выходах сети устанавливается значение близкое к нулю, то объект управления работает в безотказном режиме. При обучении сети использовалась таблица 3.5.
Таблица 3.5.
Обучение сети
| Отказы | выход 1 | выход 2 |
|
утечка в баке 1, fc1 |
1 | 0 |
|
отказ задвижки, fc2 |
0 | 1 |
На рисунке 3.23 представлены выходы нейронной сети при отказе в баке 1, рисунок 3.24 соответствует отказу задвижки.
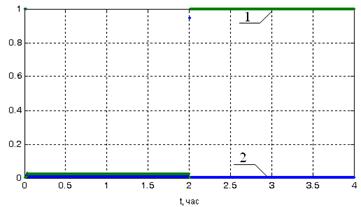
Рис. 3.23. Выходы нейронной сети при утечке в баке (внезапный отказ)
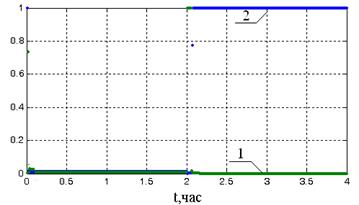
Рис. 3.24. Выходы нейронной сети при отказе задвижки (внезапный отказ)
Таким образом, нейронная сеть позволяет изолировать внезапные отказы. При этом задержки при выявлении почти не наблюдается. Реакции сети на зарождающиеся отказы объекта управления (3.23) и (3.25) изображены на рисунках 3.25, 3.26.
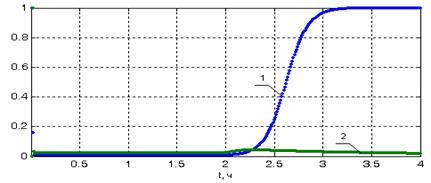
Рис. 3.25. Выходы нейронной сети при утечке в баке (зарождающийся отказ)
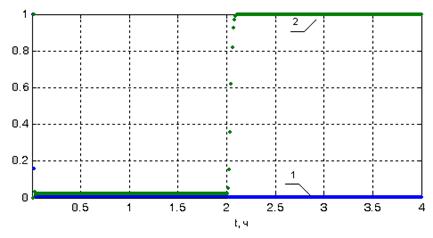
Рис. 3.26. Выходы нейронной сети при утечке в баке (зарождающийся отказ)
Как видно из рисунков изоляция зарождающихся отказов с помощью нейронной сети выполняется со значительной задержкой. Это связано с тем, что обучение сети выполнялось на установившихся значениях рассогласований при различных величинах отказов
3.4. Диагностика отказов с помощью наблюдателей при неизвестном входе
Использование данных наблюдателей позволяет сформировать сигналы рассогласования устойчивые к неопределенностям системы. В данном случае в качестве таких неопределенностей будем рассматривать ошибки линеаризации и внешнее возмущение Q1(t). Система (3.26) с этими неопределенностями будет иметь вид:
![]() (3.75)
(3.75)
В соответствии с пунктом 4.1.12 все неизвестные входные составляющие представим в виде неизвестного входного вектора:
 . (3.76)
. (3.76)
Матрицу неизвестного входа Е будем считать известной и равной:
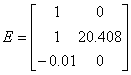 .
.
Для выполнения диагностики с помощью наблюдателей при неизвестном входе будем использовать следующее описание системы с отказами:
 (3.77)
(3.77)
где матрицы А, В, С, R1 и R2 определены при описании системы с отказами (3.26).
3.4.1. Выявление отказов
Для выявления всех рассматриваемых отказов достаточно построить один наблюдатель при неизвестном входе (рисунок 3.26). Проектирование этого наблюдателя выполнено помощью алгоритма, описанного в 2.3.9. На основе этого наблюдателя получим следующий формирователь рассогласования:
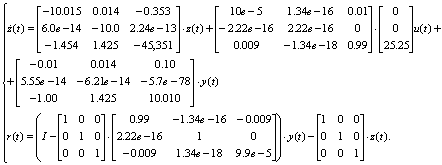 (3.78)
(3.78)
Реакции данного вектора на все рассматриваемые отказы представлены на рисунках (3.27)-(3.29). На этих рисунках введены следующие обозначения:
1 – отказ исполнительного механизма;
2 – утечка в баке;
3 – отказ задвижки;
4 – отказ датчика уровня h2;
5 – отказ датчика положения.
Из рисунков видно, что каждый из отказов вызывает
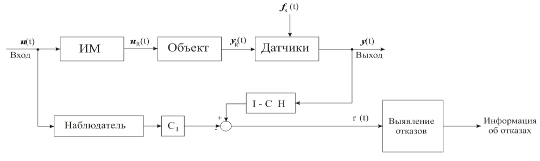
Рис. 3.26. Выявление отказов с помощью наблюдателя при неизвестном входе
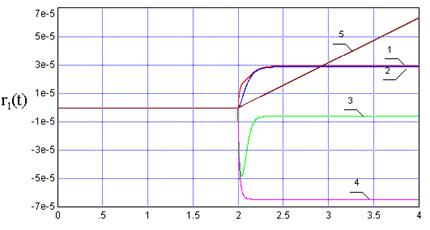
Рис. 3.27. Реакция рассогласования r1(t) на отказы
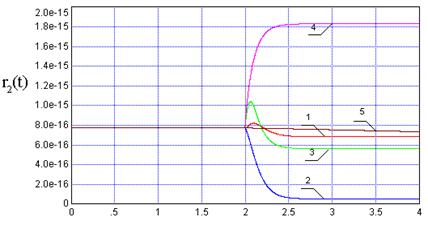
Рис. 3.28. Реакция рассогласования r2(t) на отказы
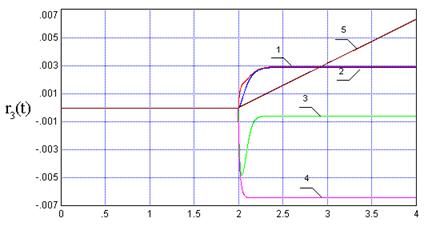
Рис. 3.29. Реакция рассогласования r3(t) на отказы
3.4.2. Изоляция отказов
Изоляция отказов датчиков
Изоляцию отказов датчиков будем выполнять с помощью формирования группы рассогласований Франка (2.4.2). Для этого в соответствии с процедурой проектирования (2.4.1) построим два наблюдателя:
- наблюдатель нечувствительный к отказу датчика положения задвижки (3.);
- наблюдатель нечувствительный к отказу датчика уровня (3. +1).
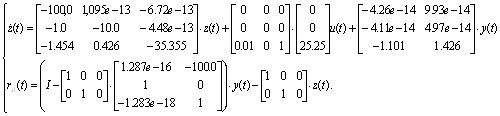 (3.79)
(3.79)
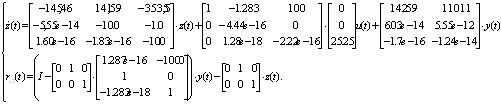 (3.80)
(3.80)
Каждый из формирователей рассогласования формирует вектора рассогласования rs1(t)=[ rs11(t); rs12(t)] и rs3(t)=[ rs31(t); rs32(t)]. Для выполнения изоляции отказов достаточно использовать по одному из элементов данных векторов. Выберем в качестве рассогласований:
rs1(t)=rs12(t)=y1(t)- ![]() . (3.81)
. (3.81)
rs3(t)=rs31(t)=y2(t)- ![]() . (3.82)
. (3.82)
Схема изоляции отказов датчиков изображена на рисунке 3.30.
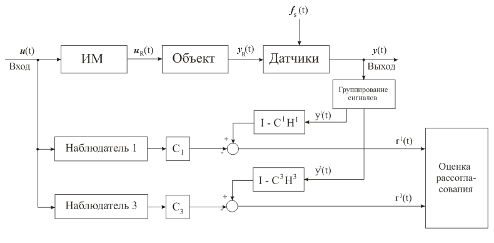
Рис. 3.30. Схема изоляции отказов датчиков
Изоляция отказов объекта управления и исполнительного механизма
Изоляцию отказов объекта управления и исполнительного механизма будем выполнять с помощью нейронной сети.
Выберем двухслойную нейронную сеть с прямыми связями. Сеть будет иметь 3 входа(рассогласования r1, r2, r3, формирователь (3.89)) и 3 выхода, соответствующие трем отказам. Функции активации нейронов сети установим логарифмическими сигмоидальными. Для обучения используем алгоритм с обратным распространением ошибки Левенберга-Маккварта.
Эта нейронная сеть будет классифицировать образцы рассогласований r1, r2, r3 в соответствии с типом отказа (утечка в баке, отказ задвижки или отказ исполнительного механизма).
Для обучения сети проводится ряд экспериментов: на модели имитаторе системы устанавливаются различные значения величин отказов δО1, δО2, и δИМ в диапазоне их изменения, получаемые при этом установившиеся значения рассогласований r1, r2, r3 запоминаются и затем используются в качестве образцов для обучения сети. Кроме того, обучение сети так же проводится на образцах, соответствующих безотказному режиму работы системы.
Построенная сеть имеет три выходных сигнала. Устанавливается, что выходные значения этих сигналов могут изменяться в пределах от 0 до 1. Значение близкое к «0» соответствует отсутствию отказа, значение «1» - отказу. Если на обоих выходах сети устанавливается значение близкое к нулю, то объект управления работает в безотказном режиме. При обучении сети использовалась таблица 3.6.
Таблица 3.6.
Обучение сети
| Отказы | выход 1 | выход 2 | выход 3 |
| утечка в баке 1, fc1 | 1 | 0 | 0 |
| отказ задвижки, fc2 | 0 | 1 | 1 |
| отказ исполнительного механизма | 0 | 0 | 1 |
На рисунках 3.30 – 3.35 представлены выходы нейронной сети при рассматриваемых отказах.
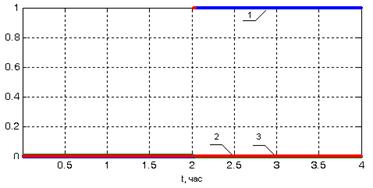
Рис. 3.30. Реакция выходов сети на утечку в баке
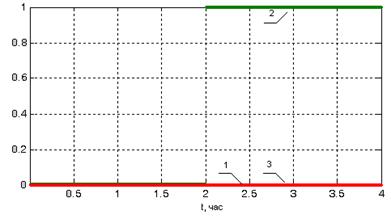
Рис.3.31. Реакция выходов сети на отказ задвижки
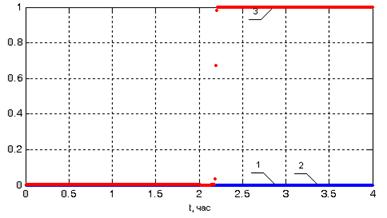
Рис. 3.32. Реакция выходов сети на отказ исполнительного механизма
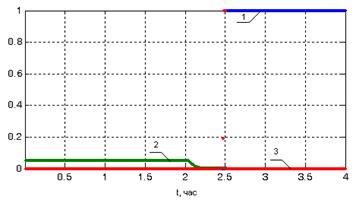
Рис. 3.33. Реакция выходов сети на отказ утечку в баке (зарождающийся отказ)
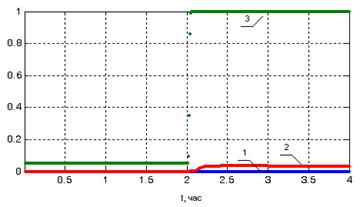
Рис. 3.34. Реакция выходов сети на отказ задвижки (зарождающийся отказ)
3.5. Основные выводы и результаты
В результате работы был разработан алгоритм диагностики отказов элементов системы управления, основный на использовании математических моделей.
Была разработана методика диагностики отказов с использованием наблюдателей состояния и наблюдателей при неизвестном входе.
Данная методика позволяет:
- выявлять отказы всех элементов системы;
- выявлять как внезапные, так и зарождающиеся отказы с минимальной задержкой выявления;
- изолировать отказы датчиков и исполнительных механизмов путем построения схем изоляции Франка или Кларка.
Наблюдатели неизвестного входа позволяют создать надежные алгоритмы диагностики отказов. Такие алгоритмы позволяют создать систему диагностики отказов чувствительную только отказам, при наличии отличия модели от реальной системы управления. Данный метод позволяет минимизировать возможность возникновения ложных сигналов отказов. Однако создание такой системы диагностики является достаточно сложной задачей, так как воздействие на систему моделируемых неопределенностей (возмущения и ошибки моделирования) не известно. Проектирование схем диагностики с помощью наблюдателей при неизвестном входе возможно в случае, если моделируемые неопределенности могут быть представлены как неизвестный вход системы с известной матрицей распределения.
Метод диагностики, основанный на использовании наблюдателей позволяет выполнить диагностику отказов датчиков и исполнительных механизмов. Задача изоляции отказов объекта управления в этом методе не рассматривается. Для решения этой задачи было предложено использовать классификационные нейронные сети.
Для исследования методики диагностики, в качестве тестового примера, была рассмотрена система регулирования уровня жидкости в баке, являющаяся упрощенным вариантом типового объекта автоматизации радиохимических производств – смесителя-отстойника.
В целях исследования была создана модель системы регулирования, содержащая модели отказов элементов системы регулирования.
Было предложено два варианта решения задачи диагностики. Первый основан на принципе формирования рассогласований с помощью наблюдателей состояния, второй на наблюдателях при неизвестном входе. Было выполнено проектирование системы диагностики и имитационное моделирование.
Метод диагностики с помощью наблюдателей состояния отличается простой процедурой проектирования и легким для использования алгоритмом, что является его неоспоримым преимуществом.
Метод диагностики с помощью наблюдателей при неизвестном входе, хотя и обладает легким для использования алгоритмом диагностики, отличается не - простой процедурой проектирования.
Метод, основанный на использовании наблюдателей позволяет выявлять и изолировать отказы датчиков и исполнительных механизмов с минимальной задержкой; выявление внезапных отказов осуществляется так же быстро, как и зарождающихся.
Изоляция отказов объекта управления может быть выполнена с помощью нейронной сети. Сеть классифицирует образцы рассогласований для различных отказов, тем самым позволяя изолировать отказы. Данный метод выявляет как внезапные, так и зарождающиеся отказы. Однако выявление последних происходит со значительной задержкой.
4. Безопасность жизнедеятельности
В данной дипломной работе осуществляется исследование алгоритмов управления и методов диагностики отказов элементов АСУТП. Данная работа носит научно-исследовательский характер и, следовательно, в данном разделе будет выполнен анализ опасных и вредных производственных факторов, воздействию которых может подвергаться исследователь, и описаны мероприятия, снижающих их воздействие на человека и окружающую среду.
4.1. Анализ опасных и вредных производственных факторов
При работе с ПЭВМ на человека оказывают воздействие следующие опасные и вредные производственные факторы (ОВПФ) (ГОСТ 12.0.003-80):
1. ОВПФ физической группы:
повышенный уровень шума на рабочем месте;
повышена или пониженная температура окружающей среды;
статическое электричество;
электромагнитное излучение;
недостаточная освещенность рабочей зоны.
2. ОВПФ психофизиологической группы:
физические перегрузки (статические);
нервно-психические перегрузки: (умственное перенапряжение; перенапряжение анализаторов; монотонность труда; эмоциональные перегрузки),
Источником шума в офисных помещениях часто являются механические устройства ЭВМ. Человек, работая при шуме, привыкает к нему, но продолжительное действие сильного шума вызывает общее утомление, может привести к ухудшению слуха, а иногда и к глухоте. Эти вредные последствия проявляются тем больше, чем сильнее шум и продолжительнее его воздействие.
Повышенная температура окружающего воздуха обусловлена нагревом вычислительной техники, другими долго работающими устройствами, что создает дискомфортную среду, вызывает нервное раздражение человека.
Основной причиной плохой освещенности рабочего места является недостаточное количество осветительных приборов, неправильная их ориентация и расположение.
Устройства визуального отображения информации (экраны дисплеев ПЭВМ, ВДТ) выделяют рентгеновское, радиочастотное, видимое, ультрафиолетовое излучения, величина которых ниже безопасного уровня, но они являются вредными и опасными видами излучения для профессиональных программистов, операторов ПЭВМ.
Нервные перегрузки и быстрое утомление возникают из-за монотонного труда оператора, длительного сохранения статического напряжения мышц спины, рук, ног.
Мероприятия по производственной санитарии направлены на предотвращение неблагоприятного влияния на здоровье человека вредных факторов производственной среды и трудового процесса при работе с ПЭВМ.
4.2.1. Требования к ПЭВМ
ПЭВМ должны соответствовать требованиям, содержащихся в СанПиН 2.2.2/2.4.1340-03. В соответствии с этим нормативным документом:
допустимые уровни звукового давления и уровней звука, создаваемых ПЭВМ, не должны превышать значений, представленных в таблице 4.1;
временные допустимые уровни электромагнитных полей (ЭМП), создаваемых ПЭВМ, не должны превышать значений, представленных в таблице 4.2;
допустимые визуальные параметры устройств отображения информации представлены в таблице 4.3. Для дисплеев на ЭЛТ частота обновления изображения должна быть не менее 75 Гц при всех режимах разрешения экрана, гарантируемых нормативной документацией на конкретный тип дисплея, и не менее 60 Гц для дисплеев на плоских дискретных экранах (жидкокристаллических, плазменных и т.п.);
концентрации вредных веществ, выделяемых ПЭВМ в воздух помещений, не должны превышать предельно допустимых концентраций (ПДК), установленных для атмосферного воздуха;
мощность экспозиционной дозы мягкого рентгеновского излучения в любой точке на расстоянии 0,05 м от экрана и корпуса ВДТ (на электронно-лучевой трубке) при любых положениях регулировочных устройств не должна превышать 1 мкЗв/час (100 мкР/час);
конструкция ПЭВМ должна обеспечивать возможность поворота корпуса в горизонтальной и вертикальной плоскости с фиксацией в заданном положении для обеспечения фронтального наблюдения экрана ВДТ; дизайн ПЭВМ должен предусматривать окраску корпуса в спокойные мягкие тона с диффузным рассеиванием света; корпус ПЭВМ, клавиатура и другие блоки и устройства ПЭВМ должны иметь матовую поверхность с коэффициентом отражения 0,4-0,6 и не иметь блестящих деталей, способных создавать блики;
конструкция ВДТ должна предусматривать регулирование яркости и контрастности;
документация на проектирование, изготовление и эксплуатацию ПЭВМ не должна противоречить требованиям СанПиН 2.2.2/2.4.1340-03.
Таблица 4.1.
Допустимые значения уровней звукового давления в октавных полосах частот и уровня звука, создаваемого ПЭВМ
|
Уровни звукового давления в октавных полосах со среднегеометрическими частотами |
Уровни звука в |
||||||||
| 31,5 Гц | 63 Гц | 125 Гц | 250 Гц | 500 Гц | 1000 Гц | 2000 Гц | 4000 Гц | 8000 Гц | дБА |
| 86 дБ | 71 дБ | 61 ДБ | 54 дБ | 49 дБ | 45 дБ | 42 дБ | 40 дБ | 38 дБ | 50 |
Таблица 4.2.
Временные допустимые уровни ЭМП, создаваемых ПЭВМ
| Наименование параметров | ВДУ ЭМП | |
| напряженность | в диапазоне частот 5 Гц-2 кГц | 25 В/м |
| электрического поля | в диапазоне частот 2 кГц-400 кГц | 2,5 В/м |
| плотность магнитного | в диапазоне частот 5 Гц-2 кГц | 250 нТл |
| потока | в диапазоне частот 2 кГц-400 кГц | 25 нТл |
| электростатический потенциал экрана видеомонитора | 500 В |
Таблица 4.3.
Допустимые визуальные параметры устройств отображения информации
| N | Параметры | Допустимые значения |
| 1 | яркость белого поля |
Не менее 35 кд/м |
| 2 | неравномерность яркости рабочего поля |
Не более ± 20% |
| 3 | контрастность (для монохромного режима) | Не менее 3:1 |
| 4 |
временная нестабильность изображения (непреднамеренное изменение во времени яркости изображения на экране дисплея) |
Не должна фиксироваться |
| 5 | пространственная нестабильность изображения (непреднамеренные изменения положения фрагментов изображения на экране) |
Не более 2·10 |
4.2.2. Требования к помещениям для работы с ПЭВМ
В соответствии с СанПиН 2.2.2/2.4.1340-03 помещения для работы с ПЭВМ должны удовлетворять ряду требований, перечисленных ниже.
Помещения для эксплуатации ПЭВМ должны иметь естественное и искусственное освещение. Эксплуатация ПЭВМ в помещениях без естественного освещения допускается только при соответствующем обосновании и наличии положительного санитарно-эпидемиологического заключения, выданного в установленном порядке.
Оконные проемы должны быть оборудованы регулируемыми устройствами типа: жалюзи, занавесей, внешних козырьков и др.
Площадь на
одно рабочее место пользователей ПЭВМ с ВДТ на базе электронно-лучевой трубки
(ЭЛТ) должна составлять не менее 6 м![]() , в
помещениях культурно-развлекательных учреждений и с ВДТ на базе плоских
дискретных экранов (жидкокристаллические, плазменные) - 4,5 м
, в
помещениях культурно-развлекательных учреждений и с ВДТ на базе плоских
дискретных экранов (жидкокристаллические, плазменные) - 4,5 м![]() .
.
При
использовании ПВЭМ с ВДТ на базе ЭЛТ (без вспомогательных устройств - принтер,
сканер и др.), отвечающих требованиям международных стандартов безопасности
компьютеров, с продолжительностью работы менее 4 часов в день допускается
минимальная площадь 4,5 м![]() на одно
рабочее место пользователя.
на одно
рабочее место пользователя.
Для внутренней отделки интерьера помещений, где расположены ПЭВМ, должны использоваться диффузно отражающие материалы с коэффициентом отражения для потолка - 0,7-0,8; для стен - 0,5-0,6; для пола - 0,3-0,5.
Полимерные материалы используются для внутренней отделки интерьера помещений с ПЭВМ при наличии санитарно-эпидемиологического заключения.
Помещения, где размещаются рабочие места с ПЭВМ, должны быть оборудованы защитным заземлением (занулением) в соответствии с техническими требованиями по эксплуатации.
Не следует размещать рабочие места с ПЭВМ вблизи силовых кабелей и вводов, высоковольтных трансформаторов, технологического оборудования, создающего помехи в работе ПЭВМ.
4.2.3. Микроклимат на рабочих местах, оборудованных ПЭВМ
В производственных помещениях, в которых работа с использованием ПЭВМ является основной (диспетчерские, операторские, расчетные, кабины и посты управления, залы вычислительной техники и др.) и связана с нервно-эмоциональным напряжением, должны обеспечиваться оптимальные параметры микроклимата для категории работ 1а и 1б, представленные в таблице 4.4. К категории 1а относятся работы, производимые сидя и не требующие физического напряжения, при котором расход энергии составляет до 120 ккал/ч; к категории 1б относятся работы, производимые сидя, стоя или связанные с ходьбой и сопровождающиеся некоторым физическим напряжением, при которых расход энергии составляет от 120 до 150 ккал/ч.
Таблица 4.4.
Оптимальные нормы микроклимата для помещений с ПЭВМ
| Сезон года | Категория работ | Температура воздуха, °С | Относительная влажность, % | Скорость движения воздуха, м/с |
| холодный и переходный | 1а | 22-24 | 40-60 | 0,1 |
| 1б | 21-23 | 40-60 | 0,1 | |
| теплый | 1а | 23-25 | 40-60 | 0,1 |
| 1б | 22-24 | 40-60 | 0,1 |
4.2.4. Шум на рабочих местах, оборудованных ПЭВМ
Уровень шума в помещении по ГОСТ 12.1003-91 в рабочей зоне не должен превышать 50 дБ.
Шумящее оборудование (печатающие устройства, серверы и т.п.), уровни шума которого превышают нормативные, должно размещаться вне помещений с ПЭВМ.
4.2.5. Освещение
Рабочие столы следует размещать таким образом, чтобы видеодисплейные терминалы были ориентированы боковой стороной к световым проемам, чтобы естественный свет падал преимущественно слева.
Искусственное освещение в помещениях для эксплуатации ПЭВМ должно осуществляться системой общего равномерного освещения.
Освещенность на поверхности стола в зоне размещения рабочего документа должна быть 300-500 лк. Освещение не должно создавать бликов на поверхности экрана. Освещенность поверхности экрана не должна быть более 300 лк.
Следует
ограничивать прямую блесткость от источников освещения, при этом яркость светящихся
поверхностей (окна, светильники и др.), находящихся в поле зрения, должна быть
не более 200 кд/м![]() .
.
Следует
ограничивать отраженную блесткость на рабочих поверхностях (экран, стол,
клавиатура и др.) за счет правильного выбора типов светильников и расположения
рабочих мест по отношению к источникам естественного и искусственного
освещения, при этом яркость бликов на экране ПЭВМ не должна превышать 40 кд/м![]() и яркость потолка не
должна превышать 200 кд/м
и яркость потолка не
должна превышать 200 кд/м![]() .
.
Показатель ослепленности для источников общего искусственного освещения в производственных помещениях должен быть не более 20.
Яркость
светильников общего освещения в зоне углов излучения от 50 до 90° с вертикалью
в продольной и поперечной плоскостях должна составлять не более 200 кд/м![]() , защитный угол
светильников должен быть не менее 40°.
, защитный угол
светильников должен быть не менее 40°.
Светильники местного освещения должны иметь непросвечивающий отражатель с защитным углом не менее 40°.
Следует ограничивать неравномерность распределения яркости в поле зрения пользователя ПЭВМ, при этом соотношение яркости между рабочими поверхностями не должно превышать 3:1-5:1, а между рабочими поверхностями и поверхностями стен и оборудования 10:1.
В качестве источников света при искусственном освещении следует применять преимущественно люминесцентные лампы типа ЛБ и компактные люминесцентные лампы (КЛЛ). При устройстве отраженного освещения в производственных и административно-общественных помещениях допускается применение металлогалогенных ламп. В светильниках местного освещения допускается применение ламп накаливания, в том числе галогенных.
Для освещения помещений с ПЭВМ следует применять светильники с зеркальными параболическими решетками, укомплектованными электронными пуско-регулирующими аппаратами (ЭПРА). Допускается использование многоламповых светильников с ЭПРА, состоящими из равного числа опережающих и отстающих ветвей.
Применение светильников без рассеивателей и экранирующих решеток не допускается.
При отсутствии светильников с ЭПРА лампы многоламповых светильников или рядом расположенные светильники общего освещения следует включать на разные фазы трехфазной сети.
Общее освещение при использовании люминесцентных светильников следует выполнять в виде сплошных или прерывистых линий светильников, расположенных сбоку от рабочих мест, параллельно линии зрения пользователя при рядном расположении видеодисплейных терминалов. При периметральном расположении компьютеров линии светильников должны располагаться локализованно над рабочим столом ближе к его переднему краю, обращенному к оператору.
Коэффициент запаса (Кз) для осветительных установок общего освещения должен приниматься равным 1,4.
Коэффициент пульсации не должен превышать 5%.
Для обеспечения нормируемых значений освещенности в помещениях для использования ПЭВМ следует проводить чистку стекол оконных рам и светильников не реже двух раз в год и проводить своевременную замену перегоревших ламп.
4.2.6. Уровень электромагнитных излучений
Нормирование электромагнитных полей радиочастот осуществляется по СанПиН 2.2.2/2.4.1340-03. Предельно допустимая напряженность на рабочем месте не должна превышать значений, приведенных в таблице 6.2.
Для предотвращения облучения оператор должен находится на расстоянии не менее 30 см от экрана монитора.
4.3. Эргономика и производственная эстетика
Эргономические требования, предъявляемые не только к конструкции, изделию, но и к организации рабочего места с точки зрения соответствия его антропологическим и физиологическим свойствам человека. Рабочее место спроектировано так, чтобы выполнение трудовых действий осуществлялось в рациональных рабочих положениях, учитывающих величину физической нагрузки при работе, необходимость ведения записей в соответствии с СанПиН 2.2.2/2.4.1340-03.
Необходимо выполнение следующих требований, предъявляемых к рабочему месту:
1. Высота рабочей поверхности стола для взрослых пользователей должна регулироваться в пределах 680-800 мм; при отсутствии такой возможности высота рабочей поверхности стола должна составлять 725 мм.
2. Модульными размерами рабочей поверхности стола для ПЭВМ, на основании которых должны рассчитываться конструктивные размеры, следует считать: ширину 800, 1000, 1200 и 1400 мм, глубину 800 и 1000 мм при нерегулируемой его высоте, равной 725 мм.
3. Рабочий стол должен иметь пространство для ног высотой не менее 600 мм, шириной – не менее 500 мм, глубиной на уровне колен – не менее 450 мм и на уровне вытянутых ног – не менее 650 мм.
4. Конструкция рабочего стула должна обеспечивать:
ширину и глубину поверхности сидения не менее 400 мм;
поверхность сидения с закругленным передним краем;
регулировку высоты поверхности сидения в пределах 400-550 мм и углам наклона вперед – до 15° и назад – до 5°;
высоту опорной поверхности спинки 300±20 мм, ширину – не менее 380 мм и радиус кривизны горизонтальной плоскости – 400 мм;
угол наклона спинки в вертикальной плоскости в пределах ±30°;
регулировку расстояния спинки от переднего края сидения в пределах 260-400 мм;
стационарные или съемные подлокотники длиной не менее 250 мм и шириной – 50- 70 мм;
регулировку подлокотников по высоте над сидением в пределах 230±30 мм и внутреннего расстояния между подлокотниками в пределах 350 – 500 мм.
5. Рабочее место пользователя ПЭВМ следует оборудовать подставкой для ног, имеющей ширину не менее 300 мм, глубину не менее 400 мм, регулировку по высоте в пределах до 150 мм и по углу наклона опорной поверхности подставки до 20°. Поверхность подставки должна быть рифленой и иметь по переднему краю бортик высотой 10 мм.
6. Клавиатуру следует располагать на поверхности стола на расстоянии 100-300 мм от края, обращенного к пользователю или на специальной регулируемой по высоте рабочей поверхности, отделенной от основной столешницы.
4.4. Электробезопасность рабочих мест
Для предотвращения образования статического электричества в помещениях необходимо использовать нейтрализаторы и увлажнители воздуха; полы должны иметь антистатическое покрытие. Допустимый уровень напряженности электростатического поля в помещениях не должен превышать 15В/м.
По типу защиты от поражения элетрическим током оргтехника подразделяются на два класса:
монитор относится ко второму классу, как имеющий изоляцию и не имеющий элемента для присоединения нулевого защитного проводника;
вся остальная техника относится к первому классу, как имеющая рабочую изоляцию и элемент для присоединения нулевого защитного проводника.
Вычислительную технику обязательно необходимо «занулять», чтобы предупредить поражение электрическим током от замыкания на корпус.
Корпус компьютера должен быть закрыт, чтобы предотвратить случайный доступ оператора к токоведущим частям.
4.5. Пожарная безопасность
Пожарная безопасность, согласно ГОСТ 12.1.004-91 «Пожарная безопасность», предусматривает такое состояние объекта, при котором исключается возможность возникновения пожара, а в случае его возникновения предотвращается защита материальных ценностей. Основными направлениями пожарной охраны являются профилактические мероприятия, направленные на предупреждение пожаров и ограничение их размеров.
Требуемый
уровень обеспечения пожарной безопасности людей с помощью указанных систем
должен быть не менее 0,999999 предотвращения воздействия опасных факторов в год
в расчете на каждого человека, а допустимый уровень пожарной опасности для
людей должен быть не более 10![]() воздействия опасных факторов
пожара, превышающих предельно допустимые значения, в год в расчете на каждого
человека.
воздействия опасных факторов
пожара, превышающих предельно допустимые значения, в год в расчете на каждого
человека.
Причинами возникновения пожара могут быть небрежности в обращении с огнем, неисправность электрических цепей и приборов, нарушение правил пожарной безопасности. Для предотвращения пожара необходимо соблюдать следующие правила на рабочем месте:
не оставлять без присмотра включенные электроприборы;
не допускать неисправностей в электропроводке;
не допускать нагрузки электропроводки выше нормы;
курить строго в отведенных для этого местах;
не загораживать проходы, не захламлять помещение легковоспламеняющимися материалами;
не загораживать вентиляционные отверстия мониторов, держать и подальше от источников тепла.
В случае возникновения пожара необходимо:
немедленно сообщить о случившемся в пожарную часть;
принять меры для эвакуации людей и ценного имущества;
пользуясь имеющими средствами пожаротушения приступить к локализации очага возгорания и его тушению, в случае возгорания изоляции электропроводки необходимо до начала тушения отключить питающее напряжение.
Каждое производственное помещение оснащено первичными средствами пожаротушения, в качестве которых могут выступать: вода, песок, химические пенные огнетушители ОХП-10, ОХВП-10, углекислотные огнетушители ОУ-2, ОУ-5, ОУ-8 (углекислотными огнетушителями отдается предпочтение в помещениях вычислительных центров). Могут быть установлены системы автоматической пожарной сигнализации и автоматического пожаротушения. Регулярно должны проводиться ознакомительные беседы и занятия по пожарной безопасности.
5. Организационно – экономический раздел
5.1. Постановка задачи
В ходе выполнения данной дипломной работы было выполнено исследование алгоритмов управления технологическими процессами и методов диагностики отказов элементов АСУТП для радиохимических производств. Результаты данной работы в дальнейшем будут использоваться в учебных целях и исследовательских работах, проводимых на кафедре. Оценить эффективность данной работы с экономической точки зрения не представляется возможным. Поэтому, в данном разделе будет выполнено сетевое планирование дипломной работы и расчет затрат на ее выполнение.
5.2. Сетевое планирование дипломной работы
Методы сетевого проектирования и управления широко и успешно применяются для оптимизации планирования и управления сложными разветвленными комплексами работ, требующими участия большого числа исполнителей и затрат ограниченных ресурсов.
Сущность сетевого проектирования заключается в том, что планируемый процесс выполнения дипломной работы изображается в виде сетевого графика, в котором увязывается весь комплекс действий для дипломной работы, при рассмотрении которого можно выделить наиболее важные моменты проектирования и сконцентрировать внимание на их выполнении.
Для построения сетевого графика выполнения дипломной работы был составлен составим перечень работ, представленный в таблице 5.1.
5.2.1 Расчет ожидаемой продолжительности выполнения работ
Рассчитаем ожидаемую продолжительность работ tij.
Ожидаемая продолжительность каждой работы определяется по формуле:
tij ож = 0,6 tij мин + 0,4 tij макс, (5.1)
где tij мин - минимальная продолжительность работы, определяемая наиболее благоприятными условиями; tij макс - максимальная продолжительность работы, определяемая наиболее неблагоприятными условиями.
Продолжительности tij макс и tij мин задаются ответственным исполнителем каждой работы.
Таблица 5.1.
Перечень и параметры работ сетевого графика
| Код работы | Наименованиие работы | Продолжительность, дн. | Исполнители, чел. | |||||
|
мин. tijмин |
макс. tijmax |
ожид. tij |
И | Р |
Р (Э) |
Р (Б) |
||
| 0,1 | формирование и утверждение темы диплома | 1 | 3 | 2 | 1 | 1 | 0 | 0 |
| 1,2 | анализ ТЗ | 2 | 7 | 4 | 1 | 0 | 0 | 0 |
| 2,3 | подбор литературы по теме диплома | 4 | 10 | 6 | 1 | 0 | 0 | 0 |
| 3,4 | изучение литературы по моделированию элементов системы управления | 10 | 14 | 12 | 1 | 0 | 0 | 0 |
| 3,6 | изучение литературы по управлению технологическими процессами радиохимических производств | 4 | 6 | 5 | 1 | 0 | 0 | 0 |
| 4,5 | построение моделей элементов системы управления в ПП Vissim | 8 | 12 | 10 | 1 | 0 | 0 | 0 |
| 5,6 | исследование моделей элементов системы управления | 5 | 9 | 7 | 1 | 0 | 0 | 0 |
| 6,7 | исследование законов управления объектом | 8 | 14 | 10 | 1 | 0 | 0 | 0 |
| 7,8 | оформление и защита отчета по преддипломной практике | 4 | 7 | 5 | 1 | 1 | 0 | 0 |
| 8,9 | получение задания по организационно-экономическому разделу | 1 | 1 | 1 | 1 | 0 | 1 | 0 |
| 8,10 | анализ литературы по диагностике отказов | 7 | 12 | 9 | 1 | 1 | 0 | 0 |
| 9,11 | подбор литературы по организационно-экономическому разделу | 1 | 3 | 2 | 1 | 0 | 0 | 0 |
| 10,12 | получение задания по разделу БЖД | 1 | 1 | 4 | 1 | 0 | 0 | 1 |
| 10,13 | построение моделей отказов в среде Vissim | 2 | 4 | 3 | 1 | 0 | 0 | 0 |
| 11,13 | оформление и сдача на проверку и подпись экономического раздела | 3 | 6 | 4 | 1 | 0 | 1 | 0 |
| 12,14 | подбор литературы по разделу БЖД | 1 | 3 | 2 | 1 | 0 | 0 | 0 |
| 13,15 | разработка алгоритма диагностики отказов | 14 | 21 | 17 | 1 | 1 | 0 | 0 |
| 14,15 | оформление и сдача на проверку и подпись раздела БЖД | 2 | 5 | 3 | 1 | 0 | 0 | 1 |
| 15,16 | анализ полученных результатов | 2 | 8 | 4 | 1 | 1 | 0 | 0 |
| 16,17 | оформление пояснительной записки и плакатов | 16 | 6 | 20 | 1 | 0 | 0 | 0 |
| 17,18 | сдача работы на подпись и рецензирование | 1 | 3 | 2 | 1 | 1 | 0 | 0 |
| 18,19 | подготовка доклада к защите дипломной работы | 2 | 7 | 4 | 1 | 1 | 0 | 0 |
| 19,20 | защита дипломной работы | 1 | 1 | 1 | 1 | 0 | 0 | 0 |
5.2.2. Расчет параметров событий сетевого графика
Ранний срок свершения исходного (нулевого) события сетевого графика принимается равным нулю. Ранний срок свершения данного промежуточного события Трi рассчитывается путем сравнения сумм, состоящих из раннего срока свершения события, непосредственно предшествующего данному, и длительности работы. В качестве раннего срока свершения события принимается максимальная из сравниваемых сумм.
Рассчитанный таким способом ранний срок свершения завершающего события всего сетевого графика принимается в качестве его же позднего срока свершения. Это означает, что завершающее событие сетевого графика никаким резервом времени не располагает.
Поздний срок свершения данного промежуточного события Тпi определяется аналогично, но только при просмотре сетевого графика в обратном направлении и поздний срок свершения равен минимуму из подсчитанных разностей. Правильность расчета поздних сроков свершения событий сетевого графика подтверждается получением нулевого позднего срока свершения исходного события.
Резерв времени образуется у тех событий, для которых поздний срок свершения больше раннего, и он равен их разности. Если же эти сроки равны, событие резервом времени не располагает и, следовательно, лежит на критическом пути [10].
Результаты расчета приведены в таблице 5.2 и изображены на сетевом графике (рисунок 5.1).
Таблица 5.2.
Параметры событий сетевого графика
| Номер события | Сроки свершения, дн | Резерв времени, дн | Номер события | Сроки свершения, дн | Резерв времени, дн | ||
| ранний | поздний | ранний | поздний | ||||
| 0 | 0 | 0 | 0 | 10 | 65 | 65 | 0 |
| 1 | 2 | 2 | 0 | 11 | 59 | 64 | 5 |
| 2 | 6 | 6 | 0 | 12 | 69 | 80 | 11 |
| 3 | 12 | 12 | 0 | 13 | 68 | 68 | 0 |
| 4 | 24 | 24 | 0 | 14 | 71 | 82 | 11 |
| 5 | 34 | 34 | 0 | 15 | 85 | 85 | 0 |
| 6 | 41 | 41 | 0 | 16 | 89 | 89 | 0 |
| 7 | 51 | 51 | 0 | 17 | 99 | 99 | 0 |
| 8 | 56 | 56 | 0 | 18 | 111 | 111 | 0 |
| 9 | 57 | 62 | 5 | 19 | 115 | 115 | 0 |
| 20 | 116 | 116 | 0 |
Таким образом, критический путь проходит через события 0,1,2,3,4,5,6,7,8,10,13,15,16,17,18,19,20.
5.2.3. Расчет параметров работ сетевого графика
Ранний срок начала работы Трнij совпадает с ранним сроком свершения ее начального события:
Трнij = Трi . (5.2)
Поздний срок начала работы Тпнij можно получить, если из позднего срока свершения ее конечного события вычесть ее ожидаемую продолжительность:
Тпнij = Тпj – tij . (5.3)
Ранний срок окончания работы Троij образуется прибавлением ее продолжительности к раннему сроку свершения ее начального события:
Троij = Трi – tij . (5.4)
Поздний срок окончания работы Тпоij совпадает с поздним сроком свершения ее конечного события:
Тпоij = Тпj . (5.5)
Для всех работ критического пути, как не имеющих резервов времени, ранний срок начала совпадает с поздним сроком начала, а ранний срок окончания – с поздним сроком окончания. Работы, не лежащие на критическом пути, обладают резервами времени.
Полный резерв времени работы Rпij образуется вычитанием из позднего срока свершения ее конечного события раннего срока свершения начального события и ее ожидаемой продолжительности:
Rпij = Тпj – Трi – tij. (5.6)
Частный резерв времени первого рода R1пij равен разности поздних сроков свершения ее конечного и начального событий за вычетом ее ожидаемой продолжительности:
R1пij = Тпj – Тпi – tij . (5.7)
Частный резерв времени второго рода R2пij равен разности ранних сроков свершения ее конечного и начального событий за вычетом ее ожидаемой продолжительности:
R2пij = Трj – Трi – tij . (5.8)
Свободный (независимый) резерв времени работы Rcij образуется вычитанием из раннего срока свершения ее конечного события позднего срока свершения ее начального события и ее ожидаемой продолжительности.
Свободный резерв времени может быть отрицательным:
Rcij = Трj – Тпi – tij . (5.9)
Работы, лежащие на критическом пути имеют коэффициент напряженности Кнij равен единице. Если работа не лежит на критическом пути ее коэффициент напряженности будет меньше единицы.
Величина коэффициента напряженности Кнij подсчитывается как отношение суммы продолжительностей отрезков максимального пути, проходящего через данную работу, не совпадающих с критическим путем, к сумме продолжительностей отрезков критического пути, не совпадающих с максимальным путем, проходящим через эту работу.
В зависимости от коэффициента напряженности все работы попадают в одну из трех зон напряженности: критическую (Кнij > 0,8), промежуточную (0,5 ≤ Кнij ≤ 0,8), резервную (Кнij < 0,5).
Результаты расчета сведены в таблицу 5.3. Из таблицы видно, что количество критических работ – 13, промежуточных –5, резервных – 5.
В целом сетевой график характеризуется следующими параметрами:
- Количество событий в сетевом графике, включая исходное: nс = 21;
- Количество работ в сетевом графике: nр = 23;
- Коэффициент сложности сетевого графика, равный отношению количества работ к количеству событий в сетевом графике: kc = np / nc = 23/21 = 1,095.
Критический путь Lкр в сетевом графике, проходящий через события и работы, не обладающие резервами времени, имеет максимальную продолжительность, равную сроку свершения завершающего события: tкр = 116 дн. [10].
Таблица 5.3.
Параметры работ сетевого графика
| Код работы |
Ожидаемая продолжитель- ность, дн |
Сроки начала, дн | Сроки окончания, дн | Резервы времени, дн |
Коэф- фициент напря-женно-сти |
|||||
| ранний | Поздний | ранний | поздний | полный | частный 1 рода | частный 2 рода | Свобод-ный | |||
| 0,1 | 2 | 0 | 0 | 2 | 2 | 0 | 0 | 0 | 0 | 1,0 |
| 1,2 | 4 | 2 | 2 | 6 | 6 | 0 | 0 | 0 | 0 | 1,0 |
| 2,3 | 6 | 6 | 6 | 12 | 12 | 0 | 0 | 0 | 0 | 0,056 |
| 3,4 | 12 | 12 | 12 | 24 | 24 | 0 | 0 | 0 | 0 | 0,655 |
| 3,6 | 5 | 12 | 36 | 17 | 41 | 24 | 0 | 0 | -24 | 0,655 |
| 4,5 | 10 | 24 | 24 | 34 | 34 | 0 | 0 | 0 | 0 | 1,0 |
| 5,6 | 7 | 34 | 34 | 41 | 41 | 0 | 0 | 0 | 0 | 1,0 |
| 6,7 | 10 | 41 | 41 | 51 | 51 | 0 | 0 | 0 | 0 | 0,621 |
| 7,8 | 5 | 51 | 51 | 56 | 56 | 0 | 0 | 0 | 0 | 0,621 |
| 8,9 | 1 | 56 | 61 | 57 | 62 | 5 | 0 | 0 | -5 | 0,621 |
| 8,10 | 9 | 56 | 56 | 65 | 65 | 0 | 0 | 0 | 0 | 1,0 |
| 9,11 | 2 | 57 | 62 | 59 | 64 | 5 | 0 | 0 | -5 | 0,218 |
| 10,12 | 4 | 65 | 75 | 69 | 80 | 11 | 0 | 0 | -11 | 1,0 |
| 10,13 | 3 | 65 | 65 | 68 | 68 | 0 | 0 | 0 | 0 | 1,0 |
| 11,13 | 4 | 59 | 64 | 63 | 68 | 5 | 0 | 0 | -5 | 1,0 |
| 12,14 | 2 | 69 | 80 | 71 | 82 | 11 | 0 | 0 | -11 | 1,0 |
| 13,15 | 17 | 68 | 68 | 85 | 85 | 0 | 0 | 0 | 0 | 1,0 |
| 14,15 | 3 | 71 | 82 | 74 | 85 | 11 | 0 | 0 | -11 | 0,218 |
| 15,16 | 4 | 85 | 85 | 89 | 89 | 0 | 0 | 0 | 0 | 1,0 |
| 16,17 | 20 | 89 | 79 | 109 | 99 | 10 | 0 | 0 | -10 | 0,456 |
| 17,18 | 2 | 99 | 109 | 101 | 111 | 10 | 0 | 0 | -10 | 1,0 |
| 18,19 | 4 | 111 | 111 | 115 | 115 | 0 | 0 | 0 | 0 | 1,0 |
| 19,20 | 1 | 115 | 115 | 116 | 116 | 0 | 0 | 0 | 0 | 0,456 |
5.3. Расчет стоимостных параметров сетевого графика
5.3.1. Расчет трудоемкости работ
Для упрощения расчётов трудоёмкости работы Tij удобно ввести понятие приведённой к ИНЖ численности работающих Чij. Для расчёта приведённой ИНЖ – численности необходимо вначале рассчитать коэффициент перерасчета Кк численности работающих k-ой категории в ИНЖ численность, равный отношению средней заработной платы работающих k-ой категории Зк к средней заработной плате ИНЖ Зинж.
Должностные оклады персонала НИИ и соответствующие коэффициенты перерасчета приведены в таблице 5.4.
Таблица 5.4.
Должностные оклады персонала НИИ
| Категория персонала | Месячный должностной оклад, руб./мес |
Коэффициент перерасчета Кк |
| руководители | 12000 | 2,0 |
| инженеры | 6000 | 1,0 |
Приведенная численность работы Чij рассчитывается по формуле:
Чij = ЧИij КИ + ЧНСij КНС, (5.10)
где ЧИij - численность инженеров, ЧНСij - численность научных сотрудников.
Приведенная к ИНЖ-дням трудоемкость работы Tij
Tij = Чij tij, (5.11)
где tij - ожидаемая продолжительность работы.
5.3.2. Расчет сметной стоимости работ
Сметную стоимость работы можно упрощённо подсчитать, зная её приведенную трудоемкость в ИНЖ-днях и среднюю стоимость одного ИНЖ-дня, Сдн. Последняя складывается из затрат, представленных в укрупнённом виде в таблице 5.4.
Среднедневная заработная плата одного инженера рассчитывается делением среднемесячной заработной платы одного инженера (основной и дополнительной) на среднее число рабочих дней в месяце, установленное в законодательном порядке. Остальные статьи затрат рассчитываются по соотношениям, приведенным в таблице 5.4. Результаты расчетов вносятся в таблицу 5.5.
Сметную стоимость работы можно упрощенно подсчитать, зная ее приведенную трудоемкость в ИНЖ-днях и среднюю стоимость одного ИНЖ-дня, Cдн. Последняя складывается из затрат, представленных в укрупненном виде в таблице 6.5.
Таким образом затраты на выполнение данной дипломной работы составляют 164 388,0 руб.
Таблица 5.4.
Статьи затрат на проведение НИР
|
Наименование |
Соотношение |
Результат, руб. |
| основная заработная плата, Зосн | Прямой расчет | 6000,0 |
| дополнительная заработная плата, Здоп | 0,1 Зосн | 600,0 |
| отчисление на социальное страхование, Осоц | 0,054(Зосн+ Здоп) | 356,4 |
| отчисление в пенсионный фонд, Оп | 0,28(Зосн+ Здоп) | 1848,0 |
| отчисление на медицинское страхование, Омед | 0,036(Зосн+ Здоп) | 237,6 |
| отчисление в фонд занятости, Оз | 0,015(Зосн+ Здоп) | 99,0 |
| стоимость материалов, покупных изделий и полуфабрикатов, См | (0,15…0,75)Зосн | 3000 |
| накладные расходы, Нр | (0,45…0,85)Зосн | 3000 |
Таблица 5.5.
Трудоемкость и сметная стоимость работ сетевого графика
| Код работы | Ожидаемая продолжительность, дн. | Исполнители, чел | Приведенная численность, инж. | Приведенная трудоемкость, инж. дн. | Среднедневная зарюплата инженера, руб./дн. | Среднедневные прочие затраты, руб./дн. | Стоимость одного инж.-дн. | Сметная стоимость работы, руб. | |||
| И | Р | Р(Э) | Р(БЖД) | ||||||||
| 0,1 | 2 | 1 | 1 | 0 | 0 | 3 | 6 | 314,3 | 406,7 | 721,0 | 4326,0 |
| 1,2 | 4 | 1 | 0 | 0 | 0 | 1 | 4 | 2884,0 | |||
| 2,3 | 6 | 1 | 0 | 0 | 0 | 1 | 5 | 3605,0 | |||
| 3,4 | 12 | 1 | 0 | 0 | 0 | 1 | 12 | 8652,0 | |||
| 3,6 | 5 | 1 | 0 | 0 | 0 | 1 | 5 | 3605,0 | |||
| 4,5 | 10 | 1 | 0 | 0 | 0 | 1 | 10 | 7210,0 | |||
| 5,6 | 7 | 1 | 0 | 0 | 0 | 1 | 7 | 5047,0 | |||
| 6,7 | 10 | 1 | 0 | 0 | 0 | 1 | 10 | 7210,0 | |||
| 7,8 | 5 | 1 | 1 | 0 | 0 | 3 | 15 | 10815,0 | |||
| 8,9 | 1 | 1 | 0 | 1 | 0 | 3 | 1 | 721,0 | |||
| 8,10 | 9 | 1 | 1 | 0 | 0 | 3 | 27 | 19467,0 | |||
| 9,11 | 2 | 1 | 0 | 0 | 0 | 1 | 2 | 1442,0 | |||
| 10,12 | 4 | 1 | 0 | 0 | 1 | 3 | 4 | 2884,0 | |||
| 10,13 | 3 | 1 | 0 | 0 | 0 | 1 | 3 | 2163,0 | |||
| 11,13 | 4 | 1 | 0 | 1 | 0 | 3 | 4 | 2884,0 | |||
| 12,14 | 2 | 1 | 0 | 0 | 0 | 1 | 2 | 1442,0 | |||
| 13,15 | 17 | 1 | 1 | 0 | 0 | 3 | 51 | 36771,0 | |||
| 14,15 | 3 | 1 | 0 | 0 | 1 | 3 | 9 | 6489,0 | |||
| 15,16 | 4 | 1 | 1 | 0 | 0 | 3 | 12 | 8652,0 | |||
| 16,17 | 20 | 1 | 0 | 0 | 0 | 1 | 20 | 14420,0 | |||
| 17,18 | 2 | 1 | 1 | 0 | 0 | 3 | 6 | 4326,0 | |||
| 18,19 | 4 | 1 | 1 | 0 | 0 | 3 | 12 | 8652,0 | |||
| 19,20 | 1 | 1 | 0 | 0 | 0 | 1 | 1 | 721,0 | |||
| Итого, руб. | 164388,0 |
Заключение
В результате работы был разработан алгоритм диагностики отказов элементов системы управления, основный на использовании математических моделей.
Была разработана методика диагностики отказов с использованием наблюдателей состояния и наблюдателей при неизвестном входе.
Данная методика позволяет:
- выявлять отказы всех элементов системы;
- выявлять как внезапные, так и зарождающиеся отказы с минимальной задержкой выявления;
- изолировать отказы датчиков и исполнительных механизмов путем построения схем изоляции Франка или Кларка.
Наблюдатели неизвестного входа позволяют создать надежные алгоритмы диагностики отказов. Такие алгоритмы позволяют создать систему диагностики отказов чувствительную только отказам, при наличии отличия модели от реальной системы управления, тем самым позволяя минимизировать возможность возникновения ложных сигналов отказов.
Метод диагностики, основанный на использовании наблюдателей позволяет выполнить диагностику отказов датчиков и исполнительных механизмов. Задача изоляции отказов объекта управления в этом методе не рассматривается. Для решения этой задачи было предложено использовать классификационные нейронные сети.
Для исследования методики диагностики, в качестве тестового примера, была рассмотрена система регулирования уровня жидкости в баке. Было предложено два варианта решения задачи диагностики. Первый основан на принципе формирования рассогласований с помощью наблюдателей состояния, второй на наблюдателях при неизвестном входе. Так же было выполнено проектирование системы диагностики, имитационное моделирование, анализ полученных результатов.
Литература
1. Chen J. and Patton R. J. Robust Model-Based Fault Diagnosis for Dynamic Systems. – Kluwer: Academic Publisher, 1999. – 326с.
2. Silvio Simani, Cesare Fantuzzi and Ron J. Patton. Model-based fault diagnosis in dynamic systems using identification techniques. – Springer-Verlag, 2002.
3. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами. – Л.: Энергоиздат, 1082. – 392 с.
4. Безопасность жизнедеятельности: Методические указания по дипломному проектированию. Под ред. Пожбелко Г.С. – Челябинск: Изд-во ЮУрГУ, 1999. – 12с.
5. Головко В.А. Нейронные сети: обучение, организация и применение. – М.: ИПРЖР, 2001. – 256 с.
6. ГОСТ 12.0.003-74. Опасные и вредные производственные факторы.
7. ГОСТ 12.1003-91. Шум. Общие требования безопасности.
8. ГОСТ 12.1.004-91. Пожарная безопасность.
9. ГОСТ 22269-76. Система «человек-машина». Рабочее место оператора.
10. Зинкевич В.С., Баев Л.А. Сетевые методы планирования и управления: Методические указания к курсовому проекту для студентов приборостроительного факультета – Челябинск: Изд. ЮУрГУ, 1998. – 22с.
11. Злакоманов В. В. Проектирование средств автоматики и управления в технических системах: Методическое руководство по дипломному проектированию. — Челябинск: Из-во ЮУрГУ, 2004. — 122 с.
12. Касюк С. Т. Разработка программного обеспечения автоматизированной системы: Методическое руководство по дипломному проектированию для студентов специальности 210100. — Челябинск: Из-во ЮУрГУ, 2006. — 158 с.
13. Медведев В.С., Потемкин В.Г. Нейронные сети: Matlab 6. – М.: Диалог-МИФИ, 2002. – 489с.
14. Мицкевич Ю.Г., Богатова Л.С. Автоматическое управление технологическими процессами радиохимических производств – М.: Атомиздат, 1970. – 424 с.
15. Основы автоматизации химических производств. Под редакцией П.А. Обновленского. – М.: Химия, 1975. – 528с.
16. СанПиН 2.2.2/2.4.1340-03. Санитерно-эпидемиологические правила и нормативы.
17. Стандарт предприятия. Курсовое и дипломное проектирование. Общие требования к оформлению. СТП ЮУрГУ 04-2001/Составители: Сырейщикова Н.В., Гузеев В.И., Сурков И.В., Винокурова Л.В., — Челябинск: ЮУрГУ, 2001. — 49 с.
18. Управление и информатика в технических системах: Методическое руководство по преддипломной практике и дипломному проектированию для студентов специальности 2101 / А. Д. Чесноков, Л. С. Казаринов, А. Е. Гудилин, А. В. Ящиков, В. Ф. Постаушкин, А. Н. Салтыков, В. И. Иванов, О. Н. Казьмин, Г. Б. Барменков; Под ред. Л.С.Казаринова. — Челябинск: ЧГТУ. 1995. — 30 с.
19. Франкс Р. Математическое моделирование в химической технологии. – М.: «Химия», 1971. – 272 с.
20. Чернобыльский И.Н. Машины и аппараты химических производств. – М.: Атомиздат, 1964. – 623с.