Курсовая работа: Основные характеристики пусковых систем
СОДЕРЖАНИЕ
ВВЕДЕНИЕ
1. Основные зависимости, характеризующие работу пусковых систем
2. РАСЧЁТНАЯ ЧАСТЬ
2.1 Выбор стартера
2.1.1 Расчёт моментов сопротивления двигателя
2.1.2 Расчёт мощности стартера
2.2 Расчёт стартерного электродвигателя
2.2.1 Определение размеров электродвигателя стартера
2.2.2 Расчёт обмотки якоря
2.2.3 Расчёт размеров пазов и зубцов якоря
2.2.4 Расчёт коллектора и щёточного аппарата
2.2.5 Расчёт магнитной цепи
2.2.6 Расчёт обмотки возбуждения
3. Тяговые электромагнитные реле: конструкция, классификация, работа
ЗАКЛЮЧЕНИЕ
СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ
1. ОСНОВНЫЕ ЗАВИСИМОСТИ, ХАРАКТЕРИЗУЮШИЕ РАБОТУ ПУСКОВЫХ СИСТЕМ
Характеристиками
пусковых систем являются по существу характеристики электродвигателя стартера.
Это зависимости мощности, частоты вращения якоря и крутящего момента стартера
от силы тока, потребляемого стартером. Однако данные зависимости не только
определяются характеристиками самого электродвигателя, обусловленными особенностям
и конструкции. Большое влияние, как важнейший элемент пусковой системы,
оказывает аккумуляторная батарея, так как является источником ограниченной
мощности и напряжение на ее выводах величина не постоянная, а падает с
увеличением нагрузки. Если принять во внимание то обстоятельство, что в стартерах
применяются электродвигатели последовательного возбуждения, то для описания
выходных характеристик систем пуска можно использовать широко известные в электротехнике
формулы. Крутящий момент, ![]() развиваемый стартером,
определяется формулой:
развиваемый стартером,
определяется формулой:
![]() (1.1)
(1.1)
где ![]() —
электромагнитный крутящий момент;
—
электромагнитный крутящий момент;
![]() — механические
потери на трение в подшипниках и щетках;
— механические
потери на трение в подшипниках и щетках;
р — число пар полюсов;
N — число проводов обмотки якоря;
a — число пар параллельных ветвей обмотки якоря;
I — ток якоря;
Ф — основной магнитный поток, проходящий через воздушный зазор и якорь стартера;
![]() —коэффициент.
—коэффициент.
Величину
механических потерь с некоторым приближением можно считать постоянной. Тогда
величина крутящего момента определяется конструктивными параметрами, влияющими
на коэффициент![]() , и значениями магнитного потока
возбуждения и тока якоря электродвигателя. Частота вращения якоря может быть
определена из формулы обратной ЭДС, индуктируемой в обмотке якоря:
, и значениями магнитного потока
возбуждения и тока якоря электродвигателя. Частота вращения якоря может быть
определена из формулы обратной ЭДС, индуктируемой в обмотке якоря:
![]() . (1.2)
. (1.2)
Для электрической цепи электродвигателя постоянного тока последовательного возбуждения, к которому приложено напряжение аккумуляторной батареи, согласно второму закону Кирхгофа можно записать:
![]() , (1.3)
, (1.3)
где ![]() — напряжение
аккумуляторной батареи;
— напряжение
аккумуляторной батареи;
![]() — сопротивление
подводящих проводов;
— сопротивление
подводящих проводов;
![]() — сопротивление
обмоток электродвигателя стартера;
— сопротивление
обмоток электродвигателя стартера;
![]() — переходное
сопротивление в месте контакта щеток и коллектора;
— переходное
сопротивление в месте контакта щеток и коллектора;
![]() — сопротивление
электрической цепи, зависящее от
— сопротивление
электрической цепи, зависящее от ![]() ,
, ![]() и
и ![]() .
.
Подставим значение обратной ЭДС, полученное из последнего уравнения в формулу, определяющую обратную ЭДС, и выразив из нее частоту вращения, получим:
 . (1.4)
. (1.4)
Из полученной формулы видно, что частота вращения якоря тем больше, чем больше напряжение аккумуляторной батареи и чем меньше падение напряжения в цепи стартера и величина магнитного потока. Используя зависимости между частотой вращения якоря и моментом стартера, можно построить зависимость характеристик в функции тока стартеа (рис.1.1).
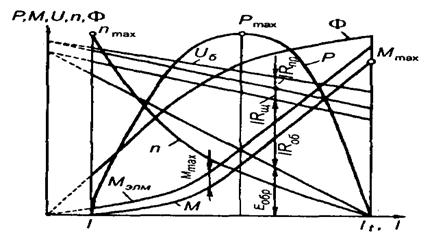
Рисунок 1.1 - Характеристики стартера в функции тока стартера.
Примем,
что напряжение аккумуляторной батареи уменьшается с увеличением нагрузки
линейно. Очевидно, что ток стартера будет нарастать от нуля до максимального
значения, которое возникает при полном затормаживании вала якоря, когда частота
вращения обратная ЭДС равны нулю. Этот ток называют током полного торможения (![]() ). Напряжение
на стартере будет меньше напряжения аккумуляторной батареи на величину падения
напряжения в подводящих проводах (
). Напряжение
на стартере будет меньше напряжения аккумуляторной батареи на величину падения
напряжения в подводящих проводах (![]() ). Известно, что падение напряжения
на щетках (
). Известно, что падение напряжения
на щетках (![]() )
можно принять постоянным. Оставшееся напряжение распределится между падением
напряжения на обмотках электродвигателя (
)
можно принять постоянным. Оставшееся напряжение распределится между падением
напряжения на обмотках электродвигателя (![]() ) и обратной ЭДС (
) и обратной ЭДС (![]() ). Так как при токе
). Так как при токе ![]() , а
, а ![]() при I=0, то получим график, показанный на
рис.1.1. Магнитный поток стартера Ф при увеличении тока изменяется соответственно
кривой намагничивания. При малых нагрузках он пропорционален току, а при
больших приближается к магнитному потоку насыщения и растет очень медленно.
Поэтому при больших нагрузках его можно считать постоянным. Тогда электромагнитный
момент
при I=0, то получим график, показанный на
рис.1.1. Магнитный поток стартера Ф при увеличении тока изменяется соответственно
кривой намагничивания. При малых нагрузках он пропорционален току, а при
больших приближается к магнитному потоку насыщения и растет очень медленно.
Поэтому при больших нагрузках его можно считать постоянным. Тогда электромагнитный
момент ![]() сначала
будет расти по параболе, а при больших нагрузках - пропорционально току.
Крутящий момент на валу стартера
сначала
будет расти по параболе, а при больших нагрузках - пропорционально току.
Крутящий момент на валу стартера ![]() будет меньше электромагнитного на величину
механических потерь
будет меньше электромагнитного на величину
механических потерь ![]() .
.
Значение тока
![]() , при котором
, при котором ![]() , соответствует режиму холостого хода. В этом режиме момент на валу
стартера равен нулю и поэтому частота вращения якоря максимальна. Затем при
малых нагрузках частота вращения уменьшается приблизительно по гиперболе, так
как магнитный поток увеличивается линейно, а обратная ЭДС уменьшается. В зоне
больших нагрузок, где магнитный поток можно считать постоянным, график
уменьшения частоты вращения приближается к абсциссе. В режиме полного
торможения - зона токов, меньших тока холостого хода, зависимости выходят за
пределы режима работы стартера (пунктирные линии на рис.1.1). Механическая
мощность на валу стартера определяется выражением:
, соответствует режиму холостого хода. В этом режиме момент на валу
стартера равен нулю и поэтому частота вращения якоря максимальна. Затем при
малых нагрузках частота вращения уменьшается приблизительно по гиперболе, так
как магнитный поток увеличивается линейно, а обратная ЭДС уменьшается. В зоне
больших нагрузок, где магнитный поток можно считать постоянным, график
уменьшения частоты вращения приближается к абсциссе. В режиме полного
торможения - зона токов, меньших тока холостого хода, зависимости выходят за
пределы режима работы стартера (пунктирные линии на рис.1.1). Механическая
мощность на валу стартера определяется выражением:
![]() . (1.5)
. (1.5)
В режиме холостого хода,
когда ![]() , и
в режиме полного торможения, когда п = 0, механическая мощность стартера равна
нулю. Кривая Р=f(I) идет вверх от нуля при
, и
в режиме полного торможения, когда п = 0, механическая мощность стартера равна
нулю. Кривая Р=f(I) идет вверх от нуля при ![]() к максимуму (
к максимуму (![]() ) при 1=0,5
) при 1=0,5![]() , а затем снова
снижается к нулю при 1=
, а затем снова
снижается к нулю при 1=![]() .
.
2. РАСЧЕТНАЯ ЧАСТЬ
2.1 Выбор стартера
2.1.1 Расчёт моментов сопротивления
Используя зависимости относительно момента сопротивления от вязкости масла и скорости прокручивания, расчёт моментов сопротивления двигателя ведётся в следующем порядке
М![]()
![]() =
=![]() (2.1)
(2.1)
где Pт – среднее значения давления трения для данного типа двигателя.
Находим давление среднего
трения P![]() для карбюраторного рядного четырехцилиндрового
двигателя, 1000 см
для карбюраторного рядного четырехцилиндрового
двигателя, 1000 см![]() , t=-25
, t=-25![]() С
С
М![]()
![]() =
=![]()
Таблица 2.1 – Зависимость
![]()
| Тип двигателя |
Значения |
| 500 1000 2000 3000 4000 6000 8000 10000 12000 | |
| Карбюраторный | |
| рядный четырехцилиндровый 0,64 0,78 1,0 1,22 1,36 1,66 1,8 2,07 2,1 |
Строим график m![]() =f(v) (гр.1)
=f(v) (гр.1)
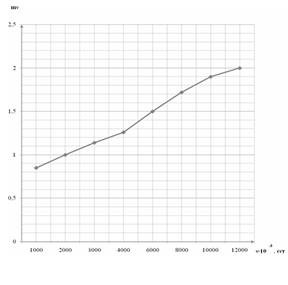
Рисунок 2.1 – Зависимость относительного момента сопротивления двигателя от вязкости масла
Определяем по графику 1
значение mv для t= -25°С. Момент сопротивления двигателя при n=const равенMν = M2000![]() mν; (2.2)
mν; (2.2)
Mν =2,4![]() 1,35=3,24
1,35=3,24 ![]()
Таблица 2.2 – Зависимость
![]()
|
Тип двигателя Значения
|
| 25 50 75 100 125 150 175 200 |
| Карбюраторный |
| рядный четырехцилиндровый 0,77 1,0 1,17 1,29 1,38 1,45 |
Находится момент сопротивления для скоростей, отличных от 100 об/мин по формуле:
![]() . (2.3)
. (2.3)
М n =0,77![]() 3,24=2,49 Н·м.
3,24=2,49 Н·м.
Таблица 2.3 – Расчет моментов сопротивления двигателя
| Параметр | Частота вращения коленчатого вала, об/мин | |||||||
| 25 | 50 | 75 | 100 | 125 | 150 | 175 | 200 | |
| Момент сопротивления, Н·м | 2,49 | 3,24 | 3,79 | 4,18 | 4,47 | 4,70 | - | - |
По полученным значениям
момента сопротивления для различных температур и скоростей прокручивания
коленчатого вала строится зависимость ![]() при постоянной температуре пуска
двигателя (рисунок 2.2).
при постоянной температуре пуска
двигателя (рисунок 2.2).
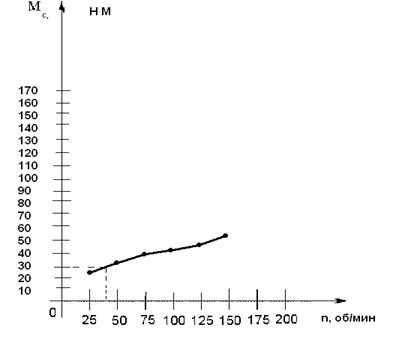
Рисунок 2.2 – Зависимость момента сопротивления двигателя прокручиванию от частоты вращения коленчатого вала
Из рисунка 2.2 видно, что
при скорости прокручивания, n =48
об/мин момент сопротивления двигателя М![]() = 30 Нм=3
= 30 Нм=3 ![]()
2.1.2 Рассчитаем необходимую мощность стартера
n![]()
![]() = 48 об/мин
= 48 об/мин
М![]() =30
=30 ![]() =3
=3 ![]()
![]() (2.4)
(2.4)
2.2Расчёт стартерного электродвигателя
2.2.1 Определение размеров электродвигателя стартера
Машинная индукция в зазоре при nn min=48 об/мин
nH= nn ![]() i; (2.5)
i; (2.5)
где, i = 12,67 -передаточное число от стартера к двигателю.
nH = 48![]() 12,67 = 608,16 об/мин
12,67 = 608,16 об/мин
![]() Вт об/мин
Вт об/мин
![]() (2.6)
(2.6)
где a - коэффициент полюсной дуги, a = 0,6-0,7;
Вd - магнитная индукция в воздушном зазоре, Тл;
AS - линейная нагрузка якоря, А/м.
![]() м3/Вт·с.
м3/Вт·с.
 ; (2.7)
; (2.7)
 Вт
Вт
где η – КПД зубчатой
передачи стартер – венец маховика, ![]() =0,52.
=0,52.
Расчет диаметра якоря
 (2.8)
(2.8)
где Ра – расчетная мощность электродвигателя, Вт.
 (м)
(м)
Расчет длины якоря
![]() (2.9)
(2.9)
![]()
Окружная скорость вращения якоря
![]() (2.10)
(2.10)
![]() м/с
м/с
Число полюсов стартера ![]()
![]() ;
;
Полюсное деление
![]() (2.11)
(2.11)
![]() ;
;
Расчетная полюсная дуга
![]() (2.12)
(2.12)
![]()
Частота перемагничивания
![]() (2.13)
(2.13)
![]()
Воздушный зазор, выбирается минимально возможным, однако чтобы магнитное поле не меняло знака, на протяжении дуги необходимо выполнение условия:
![]() ЭДС возможного зазора и зубцовой
зоны при
ЭДС возможного зазора и зубцовой
зоны при ![]()
![]() (2.14)
(2.14)
![]()
2.2.2 Расчет обмотки якоря
Параметры обмотки якоря
![]() - применяются простые волновые
обмотки
- применяются простые волновые
обмотки
Ф – полезный поток одного полюса машины:
![]() (2.15)
(2.15)
![]() Вб
Вб
Ток якоря для стартера
![]() ; (2.16)
; (2.16)
Предварительное значение тока возбуждения может быть принято равным 10-20% от величины полного тока.
![]()
Число параллельных ветвей равно числу полюсов
![]() ;
;
Число проводников обмотки якоря
![]() (2.17)
(2.17)
![]() (2.18)
(2.18)
![]() (2.19)
(2.19)
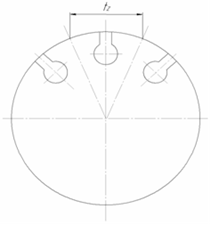
Число пазов якоря
![]() ; (2.20)
; (2.20)
![]()
Число коллекторных пластин
![]() , (2.21)
, (2.21)
где ![]() - элементарное число
пазов,
- элементарное число
пазов,
![]()
![]()
Число витков в секции обмотки
![]() (2.22)
(2.22)
Уточненное число проводников якоря
![]() (2.23)
(2.23)
Число проводников в пазу
![]() (2.24)
(2.24)
В стартерном двигателе используют простую волновую обмотку.
Шаг по коллектору
![]() (2.25)
(2.25)
Первый частичный шаг
![]() (2.26)
(2.26)
Второй частичный шаг
![]() (2.27)
(2.27)
После определения параметров якорной обмотки вычерчивается её схема.
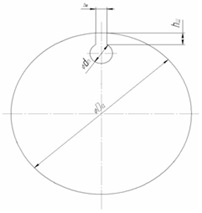
2.2.3 Расчёт размеров зубцов и пазов якоря
В машинах постоянного тока используются пазы круглой, овальной и трапецеидальной формы. Наиболее простые пазы круглой формы, поэтому вначале проверяют возможность применения именно круглого паза.
Рассчитываем интенсивность теплового нагрева
![]() Вт/м2 (2.28)
Вт/м2 (2.28)
где, ![]() - окружная скорость
якоря, м/с;
- окружная скорость
якоря, м/с;
![]() - коэффициент теплоотдачи
поверхности якоря;
- коэффициент теплоотдачи
поверхности якоря; ![]() , Вт/к
, Вт/к![]() м2
м2
![]()
![]() - предельно-допустимое превышение
температуры корпуса над температурой окружающей среды.
- предельно-допустимое превышение
температуры корпуса над температурой окружающей среды. ![]() (
(![]() );
);
![]()
Окружная скорость якоря
![]() (2.29)
(2.29)
![]()
![]()
![]()
![]()
![]()
Плотность тока
![]() об/мин.
об/мин.
![]() =
=![]()
Предварительное сечение проводников обмотки якоря
![]() (2.30)
(2.30)
Диаметр провода
![]() (2.31)
(2.31)
Принимаем провод ПЭВ-1
![]()
![]()
![]()
Величина площади паза якоря рассчитывается по формуле:
![]() (2.32)
(2.32)
где, ![]() - сечение
изолированного провода;
- сечение
изолированного провода;
![]() - число проводников пазов
- число проводников пазов
![]() - коэффициент заполнения паза.
- коэффициент заполнения паза. ![]()
![]()
Высота щели ![]()
Ширина щели ![]()
![]()
Диаметр вала якоря
![]()
Зубцовое деление
![]() (2.33)
(2.33)
Диаметр паза
![]() (2.34)
(2.34)
![]() - высота щели, выбирается от 1 до
1,5 мм
- высота щели, выбирается от 1 до
1,5 мм
![]() - ширина щели,
- ширина щели, ![]() , где
, где ![]() - диаметр
изолированного провода
- диаметр
изолированного провода
 (2.35)
(2.35)
Максимальная ширина зуба
![]() (2.36)
(2.36)
2.2.4 Расчёт коллектора и щёточного аппарата
Диаметр коллектора
![]()
Толщина кольца коллектора
![]() (2.37)
(2.37)
Ширина коллекторной
пластины ![]()
Толщина изоляции между
пластинами ![]()
Коллекторное деление
![]() м (2.38)
м (2.38)
Ширина щётки
![]() (2.39)
(2.39)
Принимаем 10
Принимаем щётки
![]() - ширина
- ширина
![]() -осевой размер
-осевой размер
![]() - высота
- высота
Активная длина коллектора
![]() (2.40)
(2.40)
![]()
Полная длина коллектора
![]() (2.41)
(2.41)
2.2.5 Расчёт магнитной цепи
Коэффициент воздушного зазора
![]() (2.42)
(2.42)
![]()
Воздушный зазор
![]() (2.43)
(2.43)
Высота сердечника полюса
![]() (2.44)
(2.44)
Осевая длина полюса
![]() (2.45)
(2.45)
Сечение сердечника полюса
![]() (2.46)
(2.46)
Ширина сердечника
![]() (2.47)
(2.47)
Сечение магнитопровода станины
![]()
![]() (2.48)
(2.48)
Высота сердечника станины
![]() (2.49)
(2.49)
МДС воздушного зазора
![]() (2.50)
(2.50)
![]()
МДС зубцовой зоны
![]() , (2.51)
, (2.51)
где ![]() -высота паза (
-высота паза (![]() )
)
Магнитная индукция в зубе
![]() (2.52)
(2.52)
По кривой намагничивания
![]()
AWZ = 2HZ·hП. (2.53)
![]()
МДС сердечника якоря
![]() (2.54)
(2.54)
Средняя линия магнитной силовой линии
![]() (2.55)
(2.55)
![]() - высота станины якоря
- высота станины якоря ![]()
![]()
По кривой намагничивания ![]()
![]() (2.56)
(2.56)
МДС полюсов машины
![]() (2.57)
(2.57)
![]()
МДС станины
![]() (2.58)
(2.58)
Средняя длина магнитной силовой линии в станине
![]() (2.59)
(2.59)
![]()
![]()
Результирующая МДС
![]() (2.60)
(2.60)
![]()
2.6 Расчёт обмотки возбуждения
Сила тока возбуждения
![]() (2.61)
(2.61)
Число витков обмотки возбуждения
![]() (2.62)
(2.62)
Плотность тока в обмотке возбуждения
![]() (2.63)
(2.63)
Сечение провода обмотки возбуждения
![]()
![]() (2.64)
(2.64)
Принимаем провод
![]()
![]()
Площадь окна для обмотки возбуждения
![]() (2.65)
(2.65)
Фактическая площадь окна
![]() (2.66)
(2.66)
![]()
ЗАКЛЮЧЕНИЕ
Курсовой проект закрепил и углубил теоретические и практические навыки, полученные за период обучения, развил и закрепил навыки самостоятельной работы с учебной и справочной литературой, нормативными документами, ГОСТами, а также навыков в выполнении технологических расчётов и графических работ. Курсовой проект развил способности к исследовательской работе, научился правильно формулировать и обосновывать задачи проекта, основываясь на базовых теоретических положениях. Задачи, самостоятельно решаемые в ходе выполнения проекта, явились эффективным средством более глубокого усвоения теоретического материала. В курсовом проекте проведены следующие расчёты: расчёт моментов сопротивления двигателя, мощности стартера, спроектирован стартерный электродвигатель, по проведённым расчётам обмотки якоря, размерам зубцов и пазов якоря, коллекторного и щёточного аппарата, магнитной цепи, обмотки возбуждения.
СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ
1. Боровских Ю.И. «Электорооборудование автомобилей». Справочник, М. Транспорт 1971
2. Боровских Ю.И. Гутенёв Н.И. «Электорооборудование автомобилей». Учебник, Киев: Высш. школа, 1988
3. «Электорооборудование автомобилей». Справочник, под ред-ей Ю.П. Чижкова. М. Транспорт, 1993
4. Ю.П. Чижков «Электорооборудование автомобилей». Курс лекций, ч. 1,2. Москва Машиностроение, 2003
5. И.С. Туревский «Электорооборудование автомобилей». Москва. Форум- Инфа М. 2005 ч.1,2.
6. М.М. Кацман «Электрические машины». Москва. 2001
7. Калисский В. С., Манзон А. И., Нагула Г. Е. Автомобиль категории «С». Учебник водителя. – М.: Транспорт, 1984. – 349 с.
8. Трантер А. Электрооборудование автомобилей. Руководство. СПб.: Алфамер Паблишинг, 2003. – 288 с.