Реферат: Основы взаимозаменяемости
2. Основы взаимозаменяемости
Взаимозаменяемостью называется свойство одних и тех же деталей, узлов или агрегатов машин и т. д., позволяющее устанавливать детали (узлы, агрегаты) в процессе сборки или заменять их без предварительной подгонки при сохранении всех требований, предъявляемых к работе узла, агрегата и конструкции в целом. Указанные свойства изделий возникают в результате осуществления научно-технических мероприятий, объединяемых понятием "принцип взаимозаменяемости".
Наиболее широко применяют полную взаимозаменяемость, которая обеспечивает возможность беспригоночной сборки (или замены при ремонте) любых независимо изготовленных с заданной точностью однотипных деталей в сборочные единицы, а последних — в изделия при соблюдении предъявляемых к ним (к сборочным единицам или изделиям) технических требований по всем параметрам качества. Выполнение требований к точности деталей и сборочных единиц изделий является важнейшим исходным условием обеспечения взаимозаменяемости. Кроме этого, для обеспечения взаимозаменяемости необходимо выполнять и другие условия: устанавливать оптимальные номинальные значения параметров деталей и сборочных единиц, выполнять требования к материалу деталей, технологии их изготовления и контроля и т. д. Взаимозаменяемыми могут быть детали, сборочные единицы и изделия в целом. В первую очередь такими должны быть детали и сборочные единицы, от которых зависят надежность и другие эксплуатационные показатели изделий. Это требование, естественно, распространяется и на запасные части.
При полной взаимозаменяемости:
упрощается процесс сборки — он сводится к простому соединению деталей рабочими преимущественно невысокой квалификации;
появляется возможность точно нормировать процесс сборки во времени, устанавливать необходимый темп работы и применять поточный метод;
создаются условия для автоматизации процессов изготовления и сборки изделий, а также широкой специализации и кооперирования заводов (при которых завод-поставщик изготовляет унифицированные изделия, сборочные единицы и детали ограниченной номенклатуры и поставляет их заводу, выпускающему основные изделия);
упрощается ремонт изделий, так как любая изношенная или поломанная деталь или сборочная единица может быть заменена новой (запасной).
Иногда для удовлетворения эксплуатационных требований необходимо изготовлять детали и сборочные единицы с малыми экономически неприемлемыми или технологически трудно выполнимыми допусками. В этих случаях для получения требуемой точности сборки применяют групповой подбор деталей (селективную сборку), компенсаторы, регулирование положения некоторых частей машин и приборов, пригонку и другие дополнительные технологические мероприятия при обязательном выполнении требований к качеству сборочных единиц и изделий. Такую взаимозаменяемость называют неполной (ограниченной). Ее можно осуществлять не по всем, а только по отдельным геометрическим или другим параметрам.
Внешняя взаимозаменяемость — это взаимозаменяемость покупных и кооперируемых изделий (монтируемых в другие более сложные изделия) и сборочных единиц по эксплуатационным показателям, а также по размерам и форме присоединительных поверхностей. Например, в электродвигателях внешнюю взаимозаменяемость обеспечивают по частоте вращения вала и мощности, а также по размерам присоединительных поверхностей; в подшипниках качения — по наружному диаметру наружного кольца и внутреннему диаметру внутреннего кольца, а также по точности вращения.
Внутренняя взаимозаменяемость распространяется на детали, сборочные единицы и механизмы, входящие в изделие. Например, в подшипнике качения внутреннюю групповую взаимозаменяемость имеют тела качения и кольца.
Уровень взаимозаменяемости производства можно характеризовать коэффициентом взаимозаменяемости Кв, равным отношению трудоемкости изготовления взаимозаменяемых деталей и сборочных единиц к общей трудоемкости изготовления изделия. Значение этого коэффициента может быть различным, однако степень его приближения к единице является объективным показателем технического уровня производства.
Совместимость — это свойство объектов занимать свое место в сложном готовом изделии и выполнять требуемые функции при совместной или последовательной работе этих объектов и сложного изделия в заданных эксплуатационных условиях.
Взаимозаменяемость, при которой обеспечивается работоспособность изделий с оптимальными и стабильными (в заданных пределах) во времени эксплуатационными показателями или с оптимальными показателями качества функционирования для сборочных единиц и взаимозаменяемость их по этим показателям, называют функциональной.
Функциональными являются геометрические, электрические, механические и другие параметры, влияющие на эксплуатационные показатели машин и других изделий или служебные функции сборочных единиц. Например, от зазора между поршнем и цилиндром (функционального параметра) зависит мощность двигателей (эксплуатационный показатель).
В России действуют Единая система допусков и посадок (ЕСДП) и Основные нормы взаимозаменяемости, которые базируются на стандартах и рекомендациях ИСО. ЕСДП распространяется на допуски размеров гладких элементов деталей и на посадки, образуемые при соединении этих деталей. Основные нормы взаимозаменяемости включают системы допусков и посадок на резьбы, зубчатые передачи, конуса и др.
2.1. Основные понятия и определения
Размеры, предельные отклонения и допуски. При конструировании определяются линейные и угловые размеры детали, характеризующие ее величину и форму. Они назначаются на основе результатов расчета деталей на прочность и жесткость, а также исходя из обеспечения технологичности конструкции и других показателей в соответствии с функциональным назначением детали. На чертеже должны быть проставлены все размеры, необходимые для изготовления детали и ее контроля.
Размеры, непосредственно или косвенно влияющие на эксплуатационные показатели машины или служебные функции узлов и деталей, называются функциональными. Они могут быть как у сопрягаемых (например, у вала и отверстия), так и у несопрягаемых поверхностей (например, размер пера лопатки турбины, размеры каналов жиклеров карбюраторов и т. п.)
Параметр — это независимая или взаимосвязанная величина, характеризующая какое-либо изделие или явление (процесс) в целом или их отдельные свойства. Параметры определяют техническую характеристику изделия или процесса преимущественно с точки зрения производительности, основных размеров, конструкции.
Размер — это числовое значение линейной величины (диаметра, длины и т. д.) в выбранных единицах измерения. Размеры подразделяют на номинальные, действительные и предельные.
Номинальный — это размер, относительно которого определяются предельные размеры и который служит также началом отсчета отклонений. Номинальный размер — это основной размер, полученный на основе кинематических, динамических и прочностных расчетов или выбранный из конструктивных, технологических, эксплуатационных, эстетических и других соображений.
Действительный — это размер, установленный измерением с допустимой погрешностью.
Предельные — это два предельно допустимых размера, между которыми должен находиться или которым может быть равен действительный размер.
Предельные размеры на предписанной длине должны быть истолкованы следующим образом:
для отверстий - диаметр наибольшего правильного воображаемого цилиндра, который может быть вписан в отверстие так, чтобы плотно контактировать с наиболее выступающими точками поверхности (размер сопрягаемой детали идеальной геометрической формы, прилегающей к отверстию без зазора), не должен быть меньше, чем проходной предел размера. Дополнительно наибольший диаметр в любом месте отверстия не должен превышать непроходного предела размера;
для валов - диаметр наименьшего правильного воображаемого цилиндра, который может быть описан вокруг вала так, чтобы плотно контактировать с наиболее выступающими точками поверхности (размер сопрягаемой детали идеальной геометрической формы, прилегающей к валу без зазора), не должен быть больше, чем проходной предел размера. Дополнительно минимальный диаметр в любом месте вала не должен быть меньше, чем непроходной предел размера.
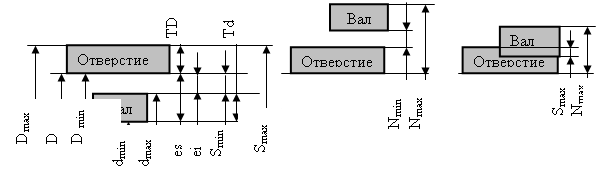
Наибольший предельный размер — это бо'льший из двух предельных, наименьший — это меньший из двух предельных размеров (рис. 2.1). ГОСТом 25346 - 89 установлены связанные с предельными размерами новые термины — "проходной" и "непроходной" пределы.
Термин "проходной предел" применяют к тому из двух предельных размеров, который соответствует максимальному количеству материала, а именно верхнему пределу для вала, нижнему - для отверстия. В случае применения предельных калибров речь идет о предельном размере, проверяемом проходным калибром.
Термин "непроходной предел" применяют к тому из двух предельных размеров, который соответствует минимальному количеству материала, а именно нижнему пределу для вала, верхнему - для отверстия. В случае применения предельных калибров речь идет о предельном размере, проверяемом непроходным калибром.
Отклонение — это алгебраическая разность между размером (действительным, предельным и т. д.) и соответствующим номинальным размером.
Действительное отклонение — это алгебраическая разность между действительным и номинальным размерами.
Предельное отклонение — это алгебраическая разность между предельным и номинальным размерами.
Классификацию отклонений по геометрическим параметрам целесообразно рассмотреть на примере соединения вала и отверстия. Термин "вал" применяют для обозначения наружных (охватываемых) элементов деталей, термин "отверстие" — для обозначения внутренних (охватывающих) элементов деталей. Термины "вал" и "отверстие" относятся не только к цилиндрическим деталям круглого сечения, но и к элементам деталей другой формы (например, ограниченным двумя параллельными плоскостями — шпоночное соединение).
Предельные отклонения подразделяют на верхнее и нижнее. Верхнее — это алгебраическая разность между наибольшим предельным и номинальным размерами, нижнее отклонение — это алгебраическая разность между наименьшим предельным и номинальным размерами.
В ГОСТе 25346 - 89 приняты условные обозначения: верхнее отклонение отверстия ЕS, вала — еs, нижнее отклонение отверстия EI, вала — ei. В таблицах стандартов верхнее и нижнее отклонения указаны в микрометрах (мкм), на чертежах — в миллиметрах (мм). Отклонения, равные нулю, не указываются. На рис. 2.1 даны примеры простановки отклонений на чертежах деталей и соединения.
Допуск—это разность между наибольшим и наименьшим предельными размерами или абсолютная величина алгебраической разности между верхним и нижним отклонениями (см. рис. 2.1). По ГОСТу 25346 - 89 введено понятие "допуск системы" — это стандартный допуск (любой из допусков), устанавливаемый данной системой допусков и посадок.
Нулевая линия — это линия, соответствующая номинальному размеру, от которой откладываются отклонения размеров при графическом изображении допусков и посадок. При горизонтальном расположении нулевой линии положительные отклонения откладываются вверх от нее, а отрицательные — вниз (см. рис. 2.1).
Поле допуска — это поле, ограниченное верхним и нижним отклонениями. Поле допуска определяется величиной допуска и его положением относительно номинального размера. При графическом изображении поле допуска заключено между двумя линиями, соответствующими верхнему и нижнему отклонениям относительно нулевой линии (см. рис. 2.1).
Для упрощения допуски можно изображать графически в виде полей допусков (рис. 2.1, б). При этом ось изделия (на рис. 2.1, б не показана) всегда располагают под схемой.
Соединения и посадки. Две или несколько подвижно или неподвижно соединяемых деталей называют сопрягаемыми. Поверхности, по которым происходит соединение деталей, называют сопрягаемыми. Остальные поверхности называют несопрягаемыми (свободными). В соответствии с этим различают размеры сопрягаемых и несопрягаемых (свободных) поверхностей. В соединении деталей, входящих одна в другую, есть охватывающие и охватываемые поверхности.
Посадкой называют характер соединения деталей, определяемый величиной получающихся в нем зазоров или натягов. Посадка характеризует свободу относительного перемещения соединяемых деталей или степень сопротивления их взаимному смещению.
В зависимости от взаимного расположения полей допусков отверстия и вала посадка может быть: с зазором (см. рис. 2.1, а), натягом или переходной, при которой возможно получение как зазора, так и натяга. Схемы полей допусков для разных посадок даны на рис. 2.2.
0 0 0 0 0 0
а) б) в)
Рис. 2.2. Схемы полей допусков посадок:
а – с зазором; б – натягом; в – переходной
Зазор S - разность размеров отверстия и вала, если размер отверстия больше размера вала. Наибольший, наименьший и средний зазоры определяют по формулам
Smax = Dmax – dmin; Smin = Dmin – dmax; Sm = (Smax + Smin)/2.
Натяг N — разность размеров вала и отверстия до сборки, если размер вала больше размера отверстия. Натяг обеспечивает взаимную неподвижность деталей после их сборки. Наибольший, наименьший и средний натяги определяют по формулам
Nmax = dmax – Dmin; Nmin = dmin – Dmax; Nm = (Nmax + Nmin)/2.
Посадка с зазором — посадка, при которой обеспечивается зазор в соединении (поле допуска отверстия расположено над полем допуска вала, рис. 2.2, а).
Посадка с натягом — посадка, при которой обеспечивается натяг в соединении (поле допуска отверстия расположено под полем допуска вала, рис. 2.2, б).
Переходная посадка — посадка, при которой возможно получение как зазора, так и натяга (поля допусков отверстия и вала перекрываются частично или полностью, рис. 2.2, в).
Допуск посадки — разность между наибольшим и наименьшим допускаемыми зазорами (допуск зазора ТS в посадках с зазором) или наибольшим и наименьшим допускаемыми натягами (допуск натяга ТN в посадках с натягом): ТS = Smax - Smin; ТN = Nmax – Nmin .
В переходных посадках допуск посадки — сумма наибольшего натяга и наибольшего зазора, взятых по абсолютному значению, TSN = Smax + Nmax. Для всех типов посадок допуск посадки численно равен сумме допусков отверстия и вала, т. е. ТS (ТN) = ТD + Тd.
2.2. Взаимозаменяемость гладких цилиндрических деталей
2.2.1. Общие положения
Точность детали определяется точностью размеров, шероховатостью поверхностей, точностью формы поверхностей, точностью расположения и волнистостью поверхностей.
Для обеспечения точности размеров в России действует Единая система допусков и посадок (ЕСДП), которая создана на основе системы ИСО. В 1949 г. было решено в основу системы ИСО положить систему ИСА, опубликованную в бюллетене ISA25 (1940 г.) и отчете комитета ISA-3 об этой системе (декабрь 1935 г.). В настоящее время система ИСО принята большинством стран-членов ИСО.
В ЕСДП в первую очередь стандартизованы базовые элементы, необходимые для получения различных полей допусков, а не посадки и образующие их поля допусков отверстий и валов. Каждое поле допуска можно представить сочетанием двух характеристик, имеющих самостоятельное значение, — величины допуска и его положения относительно номинального размера.
Допуск зависит от квалитета и размера
Т = а×i, (2.1)
где а - число единиц допуска, зависящее от квалитета и не зависящее от номинального размера; i- единица допуска.
Для нормирования требуемых уровней точности установлены квалитеты изготовления деталей и изделий. Под квалитетом (по аналогии с франц. qualiti — качество) понимают совокупность допусков, характеризуемых постоянной относительной точностью (определяемой коэффициентом а) для всех номинальных размеров данного диапазона (например, от 1 до 500 мм). Точность в пределах одного квалитета зависит только от номинального размера. В ЕСДП установлен 21 квалитет: 01, 0, 1, 2, ..., 19. Квалитет определяет допуск на изготовление и, следовательно, методы и средства обработки и контроля деталей машин.
Для квалитетов 5 - 19 число единиц допуска а соответственно равно 7, 10, 16, 25, 40, 64, 100, 160, 250, 400, 640, 1000, 1600, 2500 и 4000.
Единица допуска (мкм) для размеров до 500 мм
i = 0,45![]() ;
(2.2)
;
(2.2)
для размеров свыше 500 до 10000 мм
i = 0,004×D + 2,1, (2.3)
где D — среднее геометрическое крайних размеров каждого интервала, мм.
Для размеров менее 1 мм допуски по квалитетам 14 - 19 не назначают.
Основное отклонение — одно из двух отклонений (верхнее или нижнее), используемое для определения положения поля допуска относительно нулевой линии. В системе ЕСДП таким отклонением является отклонение, ближайшее к нулевой линии.
Основное отклонение (положение поля допуска относительно нулевой линии), зависящее от нормального размера, обозначается буквой латинского алфавита — прописной для отверстий (от А до Z) и строчной - для валов (от а до z) На рис. 2.3 приведены основные отклонения отверстий и валов в системах ИСО и ЕСДП.
Отклонения a – h (A – H) предназначены для образования посадок с зазором, js – zc (Js – ZC) – для посадок с натягами и переходных, причем для переходных обычно применяют отклонения js, k, m, n (Js, K, M, N). Поля допусков вала js и отверстия Js располагаются симметрично по обе стороны от нулевой линии. Для каждого буквенного обозначения абсолютная величина и знак основного отклонения вала определяются по эмпирическим формулам, приведенным в государственном стандарте.
Абсолютная величина и знак основного отклонения отверстия определяются по основному отклонению вала, обозначенному той же буквой, по общему или специальному правилам.
Общее правило определения основных отклонений отверстий — основное отклонение отверстия должно быть симметрично относительно нулевой линии основному отклонению вала, обозначенному той же буквой:
ЕI = - es — для отверстий от А до Н, ЕS = - ei - для отверстий от I до ZC. Исключение составляет отклонение отверстий квалитетов от 9 до 16 размеров свыше 3 мм, у которых основное отклонение ЕS = 0.
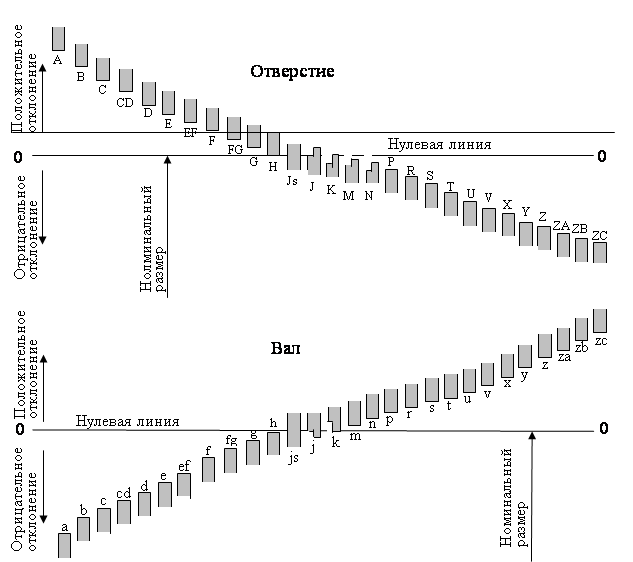
Рис. 2.3. Основные отклонения отверстий и валов
Специальное правило определения основных отклонений отверстий: две соответствующие друг другу посадки в системе отверстия и в системе вала, в которых отверстие данного квалитета соединяется с валом ближайшего, более точного квалитета (например, Н7/р6 и Р7/h6), должны иметь одинаковые зазоры и натяги (рис. 2.4):
Es = - ei + D, (2.4)
где D = ITn – ITn-1, т. е. D равна разности между допуском рассматриваемого квалитета, с которым будет сочетаться данное основное отклонение, и допуском ближайшего, более точного квалитета. Правило действительно для отверстий размером свыше 3 мм: J, K, M и N до IT8 включительно и от Р до ZC до IT7 включительно.
Различают две равноценные системы образования посадок — систему отверстия и систему вала (рис. 2.5). Посадки в системе отверстия — это посадки, в которых различные зазоры и натяги получаются соединением различных валов с основным отверстием. У основного отверстия нижнее отклонение равно нулю, а основное обозначается Н. На чертеже такие посадки обозначаются следующим образом: Æ50Н9/d9; Æ50H7/r6; Æ50H7/k6.
Посадки в системе вала — это посадки, в которых различные зазоры и натяги получаются соединением различных отверстий с основным валом. У основного вала верхнее отклонение равно нулю, а основное обозначается h. На чертеже такие посадки обозначаются, например, Æ50 D9/h9; Æ50R7/h6; Æ50K7/h6.
Посадки в системе вала — это посадки, в которых различные зазоры и натяги получаются соединением различных отверстий с основным валом. У основного вала верхнее отклонение равно нулю, а основное обозначается h. На чертеже такие посадки обозначаются, например, Æ50 D9/h9; Æ50R7/h6; Æ50K7/h6.
Допускается применение комбинированных посадок, в которых отверстие и вал выполнены в разных системах. Например, у посадки Æ50F8/f7 отверстие выполнено в системе вала, а вал – в системе отверстия.
Для построения рядов допусков каждый из диапазонов размеров, в свою очередь, разделен на несколько интервалов. Для номинальных размеров от 1 до 500 мм установлено 13 интервалов: до 3, свыше 3 до 6, свыше 6 до 10 мм, ..., свыше 400 до 500 мм.
Для полей, образующих посадки с большими зазорами или натягами, введены дополнительные промежуточные интервалы, что уменьшает колебание зазоров и натягов и делает посадки более определенными. Для всех размеров, объединенных в один интервал, значения допусков приняты одинаковыми, поскольку назначать допуск для каждого номинального размера нецелесообразно, т. к. таблицы допусков в этом случае получились бы громоздкими, а сами допуски для смежных размеров отличались бы один от другого незначительно.
В формулы (2.2) и (2.3) для определения допусков и отклонений в системе ИСО и ЕСДП подставляют среднее геометрическое крайних размеров каждого интервала:
![]() . (2.4)
. (2.4)
Для интервала до 3 мм принимают ![]() .
.
Диаметры по интервалам распределены так, чтобы допуски, подсчитанные по крайним значениям в каждом интервале, отличались от допусков, подсчитанных по среднему значению диаметра в том же интервале, не более чем на 5—8 %.
Допуски и отклонения, устанавливаемые стандартами, относятся к деталям, размеры которых определены при нормальной температуре, которая во всех странах принята равной +20 °С (ГОСТ 9249 - 59). Такая температура принята как близкая к температуре рабочих помещений машиностроительных и приборостроительных заводов.
Сочетание любых основных отклонений с любым квалитетом ИСО дает свыше 1000 полей допусков для валов и отверстий. Поэтому внедрение системы ИСО происходит на базе отбора ограниченного числа полей допусков из этой системы. Рекомендация ИСО/Р 1829 - 1970 "Отбор полей допусков для общего применения" включает 45 полей допусков для валов и 43 — для отверстий. Из них выделено по 17 полей допусков для валов и отверстий для предпочтительного применения.
Полями допусков предпочтительного применения, выделенными по принципу унификации по ГОСТу 25347 – 82 (для размеров 1 – 500мм) являются 16 полей валов (g6, h6, js6, k6, n6, p6, r6, s6, js7, h7, e7, h8, d9, h9, d11 и h11) и 10 полей отверстий (Н7, Js7, K7, P7, N7, F8, H8, E9, H9 и Н11).
Посадки, как правило, должны назначаться в системе отверстия или системе вала. Применение системы отверстия предпочтительнее. Систему вала следует применять только в тех случаях, когда это оправдано конструктивными или экономическими условиями, например, если необходимо получить разные посадки нескольких деталей с отверстиями на одном гладком валу. При посадке подшипников качения в корпус в первую очередь рекомендуется назначать предпочтительные посадки.
При номинальных размерах от 1 до 500 мм рекомендуется назначать предпочтительные посадки в системе отверстия: Н7/е8; Н7/f7; Н7/g6; Н7/h6; Н7/ls6; Н7/k6; Н7/n6; Н7/р6; Н7/r6; Н7/s6; Н8/е8; Н8/h7; Н8/h8; Н8/d9; Н9/d9; Н11/d11; Н11/h1; в системе вала: F8/H6; Н7/h6; Js7/h6; К7/h6; N7/h6; Р7/h6; Н8/h7: Е9/h8; Н8/h8; Н11/h11.
Кроме указанных посадок допускается применение других посадок, образованных полями допусков валов и отверстий по ГОСТу 25347 – 82*. При этом рекомендуется, чтобы посадка относилась к системе отверстия или системе вала и чтобы при неодинаковых допусках отверстия и вала больший допуск был у отверстия и допуски отверстия и вала отличались не более чем на два квалитета.
Пример . Определить предельные размеры, допуски, зазоры в соединении при посадке с зазором Æ40Н7/f7. Предельные отклонения взяты по ГОСТу 25346—82. Отверстие: номинальный размер 40 мм; ЕS == 0; ЕI == +25 мкм; Dmin == 40 мм; Dmах == 40,000 + 0,025 == 40,025 мм; TD == 40,025 — 40,000 = 0,025 мм. Вал: номинальный размер 40 мм; ei = -50 мкм; es = -25 мкм; dmin = 40,000 – 0,050 = 39,950 мм; dmax = 40,000 – 0,025 = 39,975 мм; Td = 39,975 – 39,950 = 0,025 мм. Соединение: номинальный размер 40 мм; Smax = 40,025 – 39,950 = 0,075 мм; Smin = 40,000 – 39,975 = 0,025 мм; TS = 0,075 – 0,035 = 0,050 мм или TS = TD + Td = 0,025 + 0,025 = 0,050 мм.
Системы допусков и отклонений для размеров св. 500 до 3150 мм установлены по ГОСТу 25346 – 89; для размеров св. 3150 до 10000 мм – по ГОСТу 25348 – 82*; для размеров свыше 10000 до 40000 мм – по ГОСТу 26179 – 84; для деталей из пластмасс - по ГОСТу 25349 – 88.
2.2.2. Обозначение полей допусков, предельных отклонений и посадок на чертежах
Предельные отклонения линейных размеров указывают на чертежах условными (буквенными) обозначениями полей допусков или числовыми значениями предельных отклонений, а также буквенными обозначениями полей допусков с одновременным указанием справа в скобках числовых значений предельных отклонений (рис. 2.6, а и б).
Посадки и предельные отклонения размеров деталей, изображенных на чертеже в собранном виде, указывают дробью: в числителе - буквенное обозначение или числовые значения предельных отклонений отверстия либо буквенное обозначение с указананием справа в скобках их числовых значений, в знаменателе — аналогичное обозначение поля допуска вала (рис. 2.6, в).
Иногда для обозначения посадки указывают предельные отклонения только одной из сопрягаемых деталей (рис. 2.6, г).
В условных обозначениях полей допусков обязательно указывать числовые значения предельных отклонений в следующих случаях: для размеров, не включенных в ряды нормальных линейных размеров, например, 41,5Н7(+0,025); при назначении предельных отклонений, условные обозначения которых не предусмотрены ГОСТом 25347 – 82*, например, для пластмассовой детали с предельными отклонениями по ГОСТу 25349 – 88.
Для поверхности, состоящей из участков с одинаковым номинальным размером, но разными предельными отклонениями, наносят границу между этими участками тонкой сплошной линией и номинальный размер с соответствующими предельными отклонениями указывают для каждого участка отдельно.
2.2.3. Неуказанные предельные отклонения размеров
Предельные отклонения, не указанные непосредственно после номинальных размеров, а оговоренные общей записью в технических требованиях чертежа, называются неуказанными предельными отклонениями. Неуказанными могут быть только предельные отклонения относительно низкой точности.
Основные правила назначения неуказанных предельных отклонений размеров установлены ГОСТом 25670 - 83. Для линейных размеров, кроме радиусов закругления и фасок, неуказанные предельные отклонения могут быть назначены либо на основе квалитетов по ГОСТу 25346 - 89 и ГОСТу 25348 – 82* (по 11—13-му квалитетам для размеров менее 1 мм и по 12 - 17-му квалитетам для размеров от 1 до 10 000 мм), либо на основе спе-циальных классов точности неуказанных предельных отклонений, установленных в ГОСТе 25670 - 83. Эти классы точности имеют условные наименования "точный", "средний", "грубый", "очень грубый". Допуски по ним обозначаются соответственно t1, t2, t3 и t4 и получены грубым округлением допусков по 12, 14, 16 и 17-му квалитетам при укрупненных интервалах номинальных размеров.
Для размеров валов и отверстий неуказанные предельные отклонения допускается назначать как односторонними — "в тело" материала (для валов от нуля в минус, для отверстий - от нуля в плюс), так и симметричными. Для размеров элементов, не относящихся к валам или отверстиям, назначаются только симметричные неуказанные предельные отклонения. Согласно ГОСТу 25670 - 83 допускается четыре варианта назначения неуказанных предельных отклонений линейных размеров (табл. 2.1).
Отклонения по 13-му квалитету могут сочетаться в одной общей записи с классом "средний", а по 15-му квалитету — с классом точности "грубый".
Для радиусов закругления и фасок в ГОСТе 25670 - 83 установлено два ряда особых (более грубых, чем для других линейных размеров) предельных отклонений. Применение этих рядов увязано с квалитетом или классом точности, предписанным в общей записи для других линейных размеров .
Подобным же образом в ГОСТе 25670 - 83 регламентируются неуказанные предельные отклонения углов. Общие записи в технических требованиях чертежа о неуказанных предельных отклонениях рекомендуется давать условными обозначениями, например (для отклонений по 14-му квалитету и классу точности "средний") по:
варианту 1: H14; h14; ±t2/2 или H14; h14; ±IT14/2;
варианту 2: +t2; - t2; ±t2/2;
варианту 3: ±t2/2 или ±IT14/2;
варианту 4: Æ H14; Æh14; ±t2/2 или Æ H14; Æh14; ±IT14/2.
Таблица 2.1
Варианты назначения неуказанных предельных отклонений линейных
размеров по ГОСТу 25670 – 83
| Вариант | Линейные размеры (кроме радиусов закругления и фасок) | ||||
| валов | отверстий | элементов, не относящихся к валам и отверстиям | |||
| с круглым сечением (диаметры) | остальные | с круглым сечением (диаметры) | остальные | ||
| 1 | -IT (h) | +IT (H) | ±t2/2 | ||
| 2 | -t | +t | ±t2/2 | ||
| 3 | ±t2/2 | ±t2/2 | |||
| 4 | -IT (h) | ±t2/2 | +IT (H) | ±t2/2 | ±t2/2 |
Допускается дополнять условные обозначения поясняющими словами, например, "Неуказанные предельные отклонения размеров: Н14; h14; ±t2/2 " или "Неуказанные предельные отклонения размеров: отверстий по Н14, валов по h14, остальных ±t2/2"; "Неуказанные предельные отклонения размеров ±t2/2".
2.2.4. Расчет и выбор посадок
Выбор различных посадок для подвижных и неподвижных соединений можно производить на основании предварительных расчетов, экспериментальных исследований или ориентируясь на аналогичные соединения, условия работы которых хорошо известны.
Посадки с зазором. Рассмотрим один из вариантов расчета посадки подшипника скольжения.
Известно, что при гидродинамическом режиме работы масляный клин в подшипнике скольжения возникает только в области определенных зазоров между цапфой вала и вкладышем подшипника. Поэтому задачей настоящего расчета является нахождение оптимального расчетного зазора и выбор по нему стандартной посадки.
Рассмотрим упрощенный метод расчета и выбора посадок, изложенный в [10].
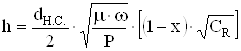
Толщина масляного слоя в месте наибольшего сближения поверхностей
отверстия и вала ![]() ,
,
где S – диаметральный зазор; ![]() - относительный эксцентриситет;
- относительный эксцентриситет;
е – абсолютный эксцентриситет вала в подшипнике при зазоре S.
Принципиальный график зависимости толщины масляного слоя от величины зазора S приведен на рис.2.7.
Как видно из рис.2.7, определенной толщине масляного слоя соответствуют два зазора. Например, [hmin] соответствуют зазоры [Smin] и [Smax]. Допустимая минимальная толщина масляного слоя, при которой еще обеспечивается жидкостное трение:
[hmin] = K×(RZD+RZD+gg) =
=K×(4RaD+4Rad+gg),
где К³2 – коэффициент запаса надежности по толщине масляного слоя; gg – добавка на неразрывность масляного слоя (gg = 2 - 3 мкм).
Поэтому необходимо соблюдать условие
h ³ [hmin], Smin ³ [Smin], (2.1)
где [Smin] – минимальный допустимый зазор, при котором толщина масляного слоя равна допустимой [hmin].
Относительный эксцентриситет хmin, соответствующий зазору Smin, из-за возможности возникновения самовозбуждающихся колебаний вала в подшипнике рекомендуется принимать не менее 0,3, т.е. xmin ³ 0,3.
Для определения х используем полученную в [10] зависимость
 , (2.2)
, (2.2)
где w - угловая скорость вала, рад/с; СR – коэффициент нагруженности подшипника; P – среднее удельное давление (Па),
 .
.
Здесь Fr – радиальная нагрузка на цапфу, Н; l, dH.C. – длина подшипника и номинальный диаметр соединения, м; m - динамическая вязкость смазочного масла при рабочей температуре tn (H×с/м2),
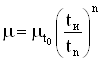 , (2.3)
, (2.3)
где tи – температура испытания масла (50°С или 100°С); ![]() – динамическая вязкость
при tи = 50oC (или 100оС); n – показатель степени, зависящий от кинематической
вязкости масла n
(табл.2.2).
– динамическая вязкость
при tи = 50oC (или 100оС); n – показатель степени, зависящий от кинематической
вязкости масла n
(табл.2.2).
Таблица 2.2
Значения показателей степени n в уравнении (2.3)
| n50 | 20 | 30 | 40 | 50 | 70 | 90 | 120 |
| n | 1,9 | 2,5 | 2,6 | 2,7 | 2,8 | 2,9 | 3,0 |
Обозначив ![]() , из формулы (2.2) получим
, из формулы (2.2) получим
 . (2.4)
. (2.4)
На рис. 2.8 приведены зависимости А от х и отношения l/dH.C. Для определения хmin необходимо по формуле (2.4) определить Аh, соответствующее [hmin]:
 .
.
По рис. 2.8 можно определить хmin – относительный эксцентриситет, соответствующий зазору [Smin]; хопт и Аопт – относительный зазор и параметр А, соответствующие оптимальному зазору Sопт, при котором толщина масляного слоя достигает своего наибольшего значения h/ (см.рис.2.7); Ах – значение параметра А при х = 0,3.
Минимальный допустимый зазор
 ,
,
где Кj - коэффициент, учитывающий угол охвата (табл.2.3).
Максимальный допустимый зазор при h = [hmin]
 .
.
Таблица 2.3
Коэффициенты, учитывающие угол охвата
| Угол охва-та j | Отношение l/dНС | |||||||||||
| 0,4 | 0,5 | 0,6 | 0,7 | 0,8 | 0,9 | 1,0 | 1,1 | 1,2 | 1,3 | 1,5 | 2,0 | |
| 360 | 0,896 | 0,913 | 0,921 | 0,932 | 0,948 | 0,963 | 0,975 | 0,982 | 0,990 | 1,009 | 1,033 | 1,083 |
| 180 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | |
| 120 | 0,958 | 0,921 | 0,908 | 0,907 | 0,891 | 0,872 | 0,860 | 0,852 | 0,829 | 0,821 | 0,814 |
При выборе посадки необходимо выполнить условие
Smax £ [Smax]. (2.5)
При этом
![]() ,
,
где ![]() -
поправка, связанная с различием коэффициентов линейных расширений материалов
вала и втулки или существенным различием температур соединенных деталей,
-
поправка, связанная с различием коэффициентов линейных расширений материалов
вала и втулки или существенным различием температур соединенных деталей, ![]() . Здесь aD, ad – коэффициенты линейного расширения втулки и
вала; DtD, Dtd - разность между
рабочей и нормальной (200С) температурами;
. Здесь aD, ad – коэффициенты линейного расширения втулки и
вала; DtD, Dtd - разность между
рабочей и нормальной (200С) температурами; ![]() - поправка, связанная с наличием
неровностей на поверхностях вала и втулки,
- поправка, связанная с наличием
неровностей на поверхностях вала и втулки, ![]() =8×(RaD + Rad ); Тизн – допуск на износ.
=8×(RaD + Rad ); Тизн – допуск на износ.
Величина допуска на износ может задаваться числовым значением, рассчитанным по требуемой долговечности подшипника, или определяться по предписанному коэффициенту запаса точности КТ:
 ,
,
где ![]() .
.
При выборе посадки необходимо использовать дополнительное условие, по которому средний зазор SC в посадке должен быть примерно равен оптимальному Sопт:
 .
.
Если при выборе посадки не удается выполнить условия (2.1) и (2.5), то следует произвести проверку правильности выбора посадки теоретико-вероятностным методом, определив для этого вероятностные зазоры:
![]() ;
;
![]() .
.
При невыполнении условий ![]() и
и ![]() необходимо
необходимо
провести повторный расчет.
Рекомендации по применению некоторых посадок с зазором. Посадку Н5/h4 (Smin= 0 и Smax = Td +Td) назначают для пар с точным центрированием и направлением, в которых допускается проворачивание и продольное перемещение деталей при регулировании. Эти посадки можно использовать вместо переходных (в том числе для сменных частей). Для вращающихся деталей их применяют только при малых скоростях и нагрузках.
Посадку Н6/h5 назначают при высоких требованиях к точности центрирования (например, пиноли в корпусе задней бабки токарного станка, измерительных зубчатых колес на шпинделях зубоизмерительных приборов), посадку Н7/h6 (предпочтительную) — при менее жестких требованиях к точности центрирования (например, сменных зубчатых колес в станках, корпусов под подшипники качения в станках, автомобилях и других машинах, поршня в цилиндре пневматических инструментов, сменных втулок кондукторов и т. п.). Посадку Н8/h7 (предпочтительную) назначают для центрирующих поверхностей, когда можно расширить допуски на изготовление при несколько пониженных требованиях к соосности.
Посадки Н5/g4; Н6/g5 и Н7/g6 (последняя предпочтительная) имеют наименьший гарантированный зазор из всех посадок с зазором. Их применяют для точных подвижных соединений, требующих гарантированного, но небольшого зазора для обеспечения точного центрирования (например, золотника в пневматической сверлильной машине, шпинделя в опорах делительной головки, в плунжерных парах и т. п.).
Для подвижных посадок наиболее распространены Н7/f7 (предпочтительная), Н8/f8 и подобные им посадки, образованные из полей допусков квалитетов 6, 8 и 9.
Посадки Н7/е8, Н8/е8 (предпочтительные), Н7/е7 и посадки, подобные им, образованные из полей допусков квалитетов 8 и 9, обеспечивают легкоподвижное соединение при жидкостной смазке. Их применяют для быстровращающихся валов больших машин.
Посадки Н8/d9, Н9/d9 (предпочтительные) и подобные им посадки, образованные из полей допусков квалитетов 7, 10 и 11, применяют сравнительно редко. Например, посадку Н7/d8 используют при большой частоте вращения и малом давлении в крупных подшипниках, а также в сопряжении поршень — цилиндр в компрессорах, посадку Н9/d9 — при невысокой точности механизмов.
Посадки Н7/c8 и Н8/с9 характеризуются значительными гарантированными зазорами, используются для соединений с невысокими требованиями к точности центрирования. Наиболее часто эти посадки назначают для подшипников скольжения (с различными температурными коэффициентами линейного расширения вала и втулки), работающих при повышенных температурах (в паровых турбинах, двигателях, турбокомпрессорах, турбовозах и других машинах, в которых при работе зазоры заметно уменьшаются вследствие того, что вал нагревается и расширяется больше, чем вкладыш подшипника).
При выборе посадок (на основе расчета) необходимо учитывать отношение l/d: чем меньше это отношение, тем меньше должен быть наименьший зазор.
Переходные посадки. Переходные посадки Н/js, Н/k, Н/m, Н/n используют в неподвижных разъемных соединениях для центрирования сменных деталей или деталей, которые при необходимости могут передвигаться вдоль вала. Эти посадки характеризуются малыми зазорами и натягами, что, как правило, позволяет собирать детали при небольших усилиях (вручную или с помощью молотка). Для гарантии неподвижности одной детали относительно другой соединения дополнительно крепят шпонками, стопорными винтами и другими крепежными средствами.
Переходные посадки предусмотрены только в квалитетах 4 - 8. Точность вала в этих посадках должна быть на один квалитет выше точности отверстия.
В переходных посадках при сочетании наибольшего предельного размера вала и наименьшего предельного размера отверстия всегда получается наибольший натяг, при сочетании наибольшего предельного размера отверстия и наименьшего предельного размера вала — наибольший зазор.
Посадки с натягом. Посадки с натягом предназначены в основном для получения неподвижных неразъемных соединений без дополнительного крепления деталей. Иногда для повышения надежности соединения дополнительно используют шпонки, штифты и другие средства крепления, как, например, при креплении маховика на коническом конце коленчатого вала двигателя. Относительная неподвижность деталей обеспечивается силами сцепления (трения), возникающими на контактирующих поверхностях вследствие их деформации, создаваемой натягом при сборке соединения.
Рассмотрим общий случай расчета посадок с натягом, когда соединение состоит из полого вала и втулки (рис. 2.9). Разность между диаметром вала и внутренним диаметром втулки до сборки определяет натяг N. При запрессовке деталей происходит растяжение втулки на величину ND и одновременно сжатие вала на величину Nd, причем N = ND + Nd. Из зада-чи определения напряжений и перемещений в толстостен
|
N = p×dНС×[(С1/E1) + (C2/E2)],
где N — расчетный натяг; р — давление на поверхности контакта вала и втулки, возникающее под влиянием натяга; dНС — номинальный диаметр сопрягаемых поверхностей; Еd и ЕD – модули упругости материалов соответственно охватываемой (вала) и охватывающей (отверстия) деталей, Па; Сd и CD –коэффициенты Ламе, определяемые по формулам
 ;
;
 ,
,
где d1 – диаметр отверстия полого вала, м; d2 – наружный диметр охватывающей детали, м; md и mD – коэффициенты Пуассона соответственно для охватываемой и охватывающей деталей. Для сплошного вала (d1 = 0) Cd = 1 - md; для массивного корпуса (d2® ∞) CD = 1 + mD.
Расчет посадок с натягом производят в следующем порядке:
1. По значениям внешних нагрузок – осевой силы, крутящего момента (Fa, TK) и размерам соединения (dH.C, l) определяется требуемое минимальное давление (Па) на контактных поверхностях соединения:
при действии ТК  ;
;
при действии Fa  ;
;
при действии ТК и Fa  ,
,
где Fa – продольная осевая сила, стремящаяся сдвинуть одну деталь относительно другой, Н; ТК – крутящий момент, стремящийся повернуть одну деталь относительно другой, Н×м; l – длина контакта сопрягаемых поверхностей, м; f - коэффициент трения при установившемся процессе распрессовки или проворачивания (табл.2.4).
Таблица 2.4
Коэффициенты трения для материалов
| Материал сопрягаемых деталей | Коэффициент трения |
| Сталь – сталь | 0,06 – 0,13 |
| Сталь – чугун | 0,07 – 0,12 |
| Сталь – латунь | 0,05 – 0,1 |
| Сталь пластмассы | 0,15 – 0,25 |
2. По полученным значениям [Pmin] определяется необходимое значение наименьшего расчетного натяга Nmin (м), который должен обеспечить передачу крутящего момента и осевой силы:
 .
.
3. Определяется величина минимального допустимого натяга с учетом поправок
к ![]() , то
есть
, то
есть
![]() ,
,
где gш – поправка, учитывающая смятие неровностей контактных поверхностей деталей при образовании соединения;
gш = 1,2 (Rzd + RzD) = 5 (Rad + RaD),
где gt – поправка, учитывающая различие рабочей температуры деталей (tD и td) и температуры сборки (tсб), различие коэффициентов линейного расширения материалов соединяемых деталей (aD и ad),
![]() ;
;
gц – поправка, учитывающая ослабление натяга под действием центробежных сил (существенна для крупных быстровращающихся деталей); для сплошного вала и одинаковых материалов соединяемых деталей
 .
.
Здесь V – окружная скорость на наружной поверхности втулки, м/с; r - плотность материала. Поправка gц для стальных деталей диаметром до 500 мм, вращающихся со скоростью до 30 м/с, не учитывается; gn – добавка, компенсирующая уменьшение натяга при повторных запрессовках, определяется опытным путем.
3. Определяется максимальное допустимое удельное давление [Pmax], при котором отсутствует пластическая деформация на контактных поверхностях деталей. В качестве Pmax берется наименьшее из двух значений
 ;
;
 ,
,
где sТd и sТD – предел текучести материалов охватываемой и охватывающей деталей.
4. Устанавливается наибольший расчетный натяг (м)
5.
Определяется величина максимального допустимого натяга, при котором не
произойдет разрушения деталей, с учетом поправок к ![]() :
:
![]() ,
,
где gуд – коэффициент увеличения удельного давления у торцов охватывающей детали, принимается по графику (рис.2.10); gt – температурная поправка, учитываемая, если при рабочей температуре натяг увеличивается.
6. Выбирается посадка из таблиц системы допусков и посадок [10] с соблюдением следующих условий: максимальный натяг Nmax в подобранной посадке должен быть не больше [Nmax], т.е. Nmax £ [Nmax]; минимальный натяг
Nmin в подобранной посадке должен быть больше [Nmin], т.е. Nmin > [Nmin].
7. Рассчитывается необходимое усилие при запрессовке собираемых деталей по формуле
Fn = fn×Pmax×p×dH.C×l,
где fn – коэффициент трения при запрессовке; fn = (1,15-1,2)f; Pmax – удельное давление при максимальном натяге (Nmax),
 .
.
Рекомендации по применению некоторых посадок с натягом. Посадки Н/р; Р/h – "легкопрессовые" - характеризуются минимальным гарантированным натягом. Установлены в наиболее точных квалитетах (валы 4 - 6-го, отверстия 5 – 7-го квалитетов). Применяются в таких случаях, когда крутящие моменты или осевые силы малы или случайное относительное смещение деталей несущественно для их служебной роли; для соединения тонкостенных деталей, не допускающих больших деформаций; для центрирования тяжелонагруженных или быстровращающихся крупногабаритных деталей (с дополнительным креплением).
Посадки H/r; H/s; H/t и R/h; S/h; T/h – "прессовые средние" - характеризуются умеренными гарантированными натягами в пределах (0,0002 – 0,0006)dНС, обеспечивающими передачу нагрузок средней величины без дополнительного крепления. Установлены для относительно высоких точностей деталей (валы 5 – 7-го, отверстия 6 – 7-го квалитетов). Сборка соединений возможна как под прессом, так и способом термической деформации.
Посадки H/u; H/ x; H/z и U/h – "прессовые тяжелые" - характеризуются большими гарантированными натягами (0,001 – 0,002)dНС. Предназначены для соединений, на которые воздействуют тяжелые, в том числе и динамические нагрузки. Применяются, как правило, без дополнительного крепления соединяемых деталей. Сборка обычно осуществляется методом термической деформации. Для посадок с большими натягами предусмотрены относительно широкие допуски деталей (7 – 9-го квалитетов).
2.3. Шероховатость поверхности
Шероховатостью поверхности согласно ГОСТу 25142 - 82 называют совокупность неровностей поверхности с относительно малыми шагами, выделенную с помощью базовой длины. Базовая длина l — длина базовой линии, используемой для выделения неровностей, характеризующих шероховатость поверхности. Базовая линия (поверхность) — линия (поверхность) заданной геометрической формы, определенным образом проведенная относительно профиля (поверхности) и служащая для оценки геометрических параметров поверхности.
Шероховатость поверхности оказывает существенное влияние на эксплуатационные свойства поверхностного слоя, следовательно, детали в целом. К показателям, характеризующим эксплуатационные свойства поверхностного слоя, относятся: действительное напряжение на поверхности двух взаимодействующих тел и, как следствие, контактная жесткость; прочность деталей из-за концентрации напряжений в отдельных рисках на поверхности; характер процесса трения между сопрягаемыми поверхностями в паре трения; изменение посадки в процессе сборки (с натягом) или при эксплуатации (с зазором); антикоррозионная стойкость повехностей; плотность и герметичность соединений; адгезионная способность к гальваническим и лакокрасочным покрытиям; декоративные свойства; удобство содержания поверхностей в чистоте и т. п..
Числовые значения шероховатости поверхности определяют от единой базы, за которую принята средняя линия профиля т, т. е. базовая линия, имеющая форму номинального профиля и проведенная так, что в пределах базовой длины среднее квадратическое отклонение профиля до этой линии минимально. Систему отсчета шероховатости от средней линии профиля называют системой средней линии.
Если для определения шероховатости выбран участок поверхности длиной l, другие неровности (например, волнистость), имеющие шаг больше l, не учитывают.
Длина оценки L - длина, на которой оценивают шероховатость. Она может содержать одну или несколько базовых длин l. Числовые значения базовой длины выбирают из ряда: 0,01; 0,03; 0,08; 0,25; 0,80; 2,5; 8; 25 мм.
Параметры шероховатости. Согласно ГОСТу 2789 – 73* шероховатость поверхности изделий независимо от материала и способа изготовления можно оценивать следующими параметрами (рис. 2.11):
1. Среднее арифметическое отклонение профиля Ra - среднее арифметическое из абсолютных значений отклонений профиля в пределах базовой длины:
 ,
,
где l — базовая длина; n — число выбранных точек профиля на базовой длине; у — расстояние между любой точкой профиля и средней линией (отклонение профиля).
2. Высота неровностей профиля по десяти точкам Rz — сумма средних абсолютных значений высот пяти наибольших выступов профиля и глубин пяти наибольших впадин профиля в пределах базовой длины:
 или
или  ,
,
где ![]()
![]() определяются относительно средней
линии, а hi max, hi min –относительно произвольной прямой, параллельной средней
линии и не пересекающей профиль.
определяются относительно средней
линии, а hi max, hi min –относительно произвольной прямой, параллельной средней
линии и не пересекающей профиль.
3. Наибольшая высота неровностей профиля Rmax — расстояние между линией выступов профиля и линией впадин профиля в пределах базовой длины.
4. Средний шаг неровностей профиля Sm — среднее арифметическое значение шага неровностей профиля в пределах базовой длины:
![]()
![]() ,
,
где Smi — шаг неровностей профиля, равный длине отрезка средней линии, заключенного между точками пересечения смежных выступов и впадин профиля со средней линией.
5. Средний шаг неровностей профиля по вершинам S — среднее арифметическое значение шага неровностей профиля по вершинам в пределах базовой длины:
![]() ,
,
Si — шаг неровностей профиля, равный длине отрезка средней линии, заключенного между проекциями на нее наивысших точек двух соседних местных выступов профиля.
6. Относительная опорная длина профиля tр — отношение опорной длины профиля к базовой длине:
![]() ,
,
где hр - опорная длина профиля — сумма длин отрезков bi, отсекаемых на заданном уровне р в материале профиля линией, эквидистантной средней линии т в пределах базовой длины (см. рис. 2.11):
![]() .
.
Опорную длину профиля определяют на уровне сечения профиля р, т. е. на заданном расстоянии между линией выступов профиля и линией,
пересекающей профиль эквидистантно линии выступов профиля, и строят кривую изменения опорной длины профиля (рис. 2.12). Значение уровня сечения профиля р отсчитывают по линии выступов и выбирают из ряда: 5; 10; 15; 20; 25; 30; 40; 50; 60; 70,; 80; 90 % от Rmax.
Числовые значения параметров шероховатости Ra, Rz, Rmax, Sm, S и tp приведены в ГОСТе 2789 – 73*.
Обозначение шероховатости на чертежах. ГОСТ 2.309 – 73* устанавливает обозначения шероховатости поверхностей и правила нане-
сения их на чертежах изделий.
На рис. 2.13 приведена структура обозначения шероховатости. При обозначении шероховатости только по параметру применяют знак без полки.
Примеры обозначения шероховатости на чертежах приведены на рис. 2.14. В обозначении числового значения
параметра Ra символ не указывается (см. рис. 2.14).
Если параметры Rа, Rz, Rmax определены на базовой длине в соответствии с ГОСТом 2789 – 73*, то эти базовые длины не указываются в требованиях к шероховатости (рис. 2.14, б).
При необходимости дополнительно к параметрам шероховатости поверхности устанавливаются требования по направлению неровностей поверхности (табл. 2.5), а также по способу или последовательности способов получения (обработки) поверхности. При этом способ обработки указывают только в случаях, когда он является единственно приемлемым для получения требуемого качества поверхности.
Таблица 2.5
Направления неровностей поверхности по ГОСТу 2789 – 73*
| Типы направления неровностей | Схематическое изображение | Условное обозначение | ||
| Параллельное | ||||
| Перпендикулярное | ||||
| Перекрещивающееся | ||||
| Произвольное |
|
|||
| Кругообразное | ||||
|
|
При указании двух и более параметров шероховатости поверхности значения параметров записывают сверху вниз в следующем порядке: высота неровностей профиля, шаг неровностей профиля, относительная опорная длина профиля (рис. 2.14, а).
Допускается применять упрощенное обозначение шероховатости поверхностей с разъяснением его в технических требованиях чертежа (рис. 2.14, в).
Допускаемые значения Rа и Rz в зависимости от допуска размера и формы установлены по четырем уровням относительной геометрической точности, определяемых соотношением допусков геометрии и размера соответственно: A=60 %, B=40 %, С=25 % и D < 25% (табл. 2.6).
Таблица 2.6
Параметры шероховатости в зависимости от
допусков размера IT и формы Tф
|
При допуске формы Tф в процентах от допуска размера IT |
Параметр Ra | Параметр Rz |
| А = 60% | Ra £ 0,05IT | Rz = 0,2IT |
| В = 40% | Ra £ 0,025IT | Rz = 0,1IT |
| С = 25% | Ra £ 0,012IT | Rz = 0,05IT |
| D < 25% | Ra = 0,15Tф | Rz = 0,6Tф |
2.4. Точность формы и расположения
Допуски формы и расположения поверхностей деталей машин и приборов, термины, определения, относящиеся к основным видам отклонений, стандартизованы ГОСТом 24642 – 81*.
В основу нормирования и систему отсчета отклонений формы и расположения поверхностей положен принцип прилегающих поверхностей и профилей, элементов, деталей, сборочных единиц (узлов). Все отклонения и допуски подразделяются на три группы: формы; расположения; суммарные – формы и расположения.
2.4.1. Общие термины и определения
Профиль—это линия пересечения поверхности с плоскостью или заданной поверхностью. Различают профили номинальной и реальной поверхностей.
Нормируемый участок - это участок поверхности или линии, к которому относится допуск на отклонение формы или расположение элемента. Нормируемый участок должен задаваться размерами, определяющими его площадь, длину или угол сектора (в полярных координатах). Если нормируемый участок не задан, то допуск или отклонение формы или расположения должен относиться ко всей поверхности или длине рассматриваемого элемента.
База - элемент детали (или выполняющее ту же функцию сочетание элементов), определяющий одну из плоскостей или осей системы координат, по отношению к которой задается допуск расположения или определяется отклонение расположения рассматриваемого элемента. Базами могут быть, например, базовая плоскость, базовая ось, базовая плоскость симметрии.
Комплект баз - совокупность двух или трех баз, образующих систему координат, по отношению к которой задается допуск расположения или определяется отклонение расположения рассматриваемого элемента.
Прилегающая плоскость и прилегающая прямая - плоскость или прямая, соприкасающаяся с реальной поверхностью или профилем и расположенная вне материала детали так, чтобы отклонение от нее наиболее удаленной точки соответственно реальной поверхности или профиля в пределах нормируемого участка имело минимальное значение (рис. 2.15, а).
Прилегающая окружность - это окружность минимального диаметра, описанная вокруг реального профиля (для наружной поверхности вращения), или максимального диаметра, вписанная в реальный профиль (для внутренней поверхности вращения) (рис. 2.15, б и в).
Прилегающий цилиндр - это цилиндр минимального диаметра, описанный вокруг реальной поверхности (для наружной поверхности вращения), или максимального диаметра, вписанный в реальную поверхность (для внутренней поверхности вращения).
Прилегающий профиль продольного сечения цилиндрической поверхности – две параллельные прямые, соприкасающиеся с реальным профилем (двумя реальными образующими, лежащими в продольном сечении) и расположенные вне материала детали так, чтобы наибольшее отклонение точек образующих профиля имело минимальное значение (рис. 2.16).
Общая ось - это прямая, относительно которой наибольшее отклонение осей нескольких рассматриваемых поверхностей вращения в пределах длины этих поверхностей, имеет минимальное значение (рис. 2.17, а). Для двух поверхностей общей осью является прямая, проходящая через оси рассматриваемых поверхностей в их средних сечениях (рис. 2.17, б).
Общая плоскость симметрии - это плоскость, относительно которой наибольшее отклонение плоскостей симметрии нескольких рассматриваемых элементов в пределах длины этих элементов имеет минимальное значение (рис. 2.18).
Выступающее поле допуска расположения – поле допуска или часть его, ограничивающие отклонение расположения элемента за пределами протяженности этого элемента (наружный участок выступает за пределы длины элемента) (рис. 2.19).
Приняты следующие буквенные обозначения: D — отклонение формы или отклонение расположения поверхностей; Т — допуск формы или допуск расположения; L — длина нормируемого участка.
Классификация отклонений и допусков формы и расположения приведена в табл. 2.7.
2.4.2. Отклонения и допуски формы
К отклонениям формы относятся отклонения прямолинейности, плоскостности, круглости, профиля продольного сечения и цилиндричности.
Отклонения формы плоских поверхностей. Отклонение от плоскостности определяют как наибольшее расстояние D от точек реальной поверхности до прилегающей плоскости в пределах нормируемого участка (рис. 2.20, а). Частными видами отклонений от плоскостности являются выпуклость (рис. 2.20, б) и вогнутость (рис. 2.20, в). Отклонение от прямолинейности (см. рис. 2.15, а) определяют как большее расстояние D от точек реального профиля до прилегающей прямой.
Таблица 2.7
Допуски формы и расположения и их условные знаки
| Группа допусков | Вид допуска | Знак | Группа допусков | Вид допуска | Знак |
|
|
Прямолинейности | Суммарные допуски формы и расположения | Радиального биения | ||
| Плоскостности | Торцового биения | ||||
| Круглости | Биения в заданном направлении | ||||
| Профиля продольного сечения | Полного радиального биения | ||||
| Цилиндричности | Полного торцового биения | ||||
|
|
Параллельности | ||||
| Перпендикулярности | Формы заданного профиля | ||||
| Наклона | |||||
| Соосности | |||||
| Симметричности | Формы заданной поверхности | ||||
| Позиционный | |||||
| Пересечения осей |
Отклонения формы цилиндрических поверхностей. Отклонение от круглости - наибольшее расстояние D от точек реального профиля до прилегающей окружности (рис. 2.15, б и в). Частными видами отклонений от круглости являются овальность и огранка (рис. 2.21, а и б). Огранка может быть с четным и нечетным числом граней. Огранка с нечетным числом граней характеризуется равенством размера d (рис. 2.21, б).
Отклонение от цилиндричности — наибольшее расстояние D от точек реальной поверхности до прилегающего цилиндра в пределах нормируемого участка L (рис. 2.21, в).
Отклонение профиля продольного сечения - наибольшее расстояние D от точек образующих реальной поверхности, лежащих в плоскости, проходящей через ее ось, до соответствующей стороны прилегающего профиля в пределах нормируемого участка (см. рис. 2.16). Отклонение профиля продольного сечения характеризует отклонения от прямолинейности и параллельности образующих.
Частными видами отклонения профиля продольного сечения являются конусообразность (рис. 2.21, г), бочкообразность (рис. 2.21, д) и седлообразность (рис. 2.21, е).
Отклонение D от прямолинейности оси (или линии) в пространстве и поле допуска прямолинейности оси Т показаны на рис. 2.21, ж.
2.4.3. Отклонения и допуски расположения
Отклонением расположения поверхности или профиля называют отклонение реального расположения поверхности (профиля) от его номинального расположения. Количественно отклонения расположения оценивают в соответствии с определениями, приведенными ниже. При оценке отклонений расположения отклонения формы рассматриваемых поверхностей (профилей) и базовых элементов (обобщенный термин, под которым понимают поверхность, линию или точку) должны быть исключены из рассмотрения. При этом реальные поверхности (профили) заменяют прилегающими, а за оси, плоскости симметрии и центры реальных поверхностей (профилей) принимают оси, плоскости симметрии и центры прилегающих элементов.
Отклонение от параллельности плоскостей (рис. 2.22, а) - разность D наибольшего и наименьшего расстояний между прилегающими плоскостями в пределах нормируемого участка.
Отклонение от параллельности осей (прямых) в пространстве - геометрическая сумма отклонений от параллельности проекций осей (прямых) в двух взаимно перпендикулярных плоскостях; одна из этих плоскостей является общей плоскостью осей, т. е. плоскостью, проходящей через одну (базовую) ось и точку другой оси (рис. 2.22, б).
Отклонение от перпендикулярности плоскостей показано на рис. 2.22, в.
Отклонение от соосности относительно общей оси - это наибольшее расстояние (D1, D2 …) между осью рассматриваемой поверхности вращения и общей осью двух или нескольких поверхностей вращения на длине нормируемого участка (рис. 2.22, г). Допуск соосности в диаметральном выражении равен удвоенному наибольшему допускаемому значению отклонения от соосности, а в радиусном выражении - наибольшему допускаемому значению этого отклонения. Поле допуска соосности — область в пространстве, ограниченная цилиндром, диаметр которого равен допуску соосности в диаметральном выражении Т или удвоенному допуску соосности в радиусном выражении R, а ось совпадает с базовой осью (рис. 2.22, д). Двоякая количественная оценка соосности (в диаметральном и радиусном выражении) принята по рекомендации ИСО также для симметричности и пересечения осей. Ранее эти отклонения определяли только в радиусной мере.
Отклонение от симметричности относительно базовой плоскости — наибольшее расстояние D между плоскостью симметрии рассматриваемой поверхности и базовой плоскостью симметрии в пределах нормируемого участка (рис. 2.22, е). Допуск симметричности проставляется в диаметральном выражении Т или в радиусном выражении Т/2.
Отклонение наклона – отклонение угла между прилегающей плоскостью (или осью поверхности вращения) и базовой от номинального угла a, выраженное в линейных единицах D на длине нормируемого участка L (рис. 2.22, ж).
Позиционное отклонение — наибольшее отклонение D реального расположения элемента (его центра, оси или плоскости симметрии) от его номинального расположения в пределах нормируемого участка (рис. 2.22, з).
Отклонение от пересечения осей, которые номинально должны пересекаться, определяют как наименьшее расстояние D между рассматриваемой и базовой осями (рис. 2.22, и). Допуск пересечения проставляется в диаметральном выражении Т или в радиусном выражении Т/2.
2.4.4. Суммарные отклонения и допуски формы и расположения поверхностей
Суммарным отклонением формы и расположения называется отклонение, являющееся результатом совместного проявления отклонения формы и отклонения расположения рассматриваемого элемента (поверхности или профиля) относительно заданных баз. Количественно суммарные отклонения оцениваются по точкам реальной нормируемой поверхности относительно прилегающих базовых элементов или их осей.
Радиальное биение поверхности вращения относительно базовой оси является результатом совместного проявления отклонения от круглости профиля рассматриваемого сечения и отклонения его центра относительно базовой оси. Оно равно разности наибольшего и наименьшего расстояний от точек реального профиля поверхности вращения до базовой оси в сечении, перпендикулярном этой оси (D на рис. 2.23, а).
Торцовое биение – разность D наибольшего и наименьшего расстояний от точек реального профиля торцовой поверхности до плоскости, перпендикулярной базовой оси. Определяется на заданном диаметре d или любом (в том числе и наибольшем) диаметре торцовой поверхности (рис. 2.23, б).
Биение в заданном направлении – разность D наибольшего и наименьшего расстояний от точек реального профиля поверхности вращения в сечении рассматриваемой поверхности конусом, ось которого совпадает с базовой осью, а образующая имеет заданное направление, до вершины этого конуса (рис. 2.23, в).
Полное радиальное биение – разность D наибольшего Rmax и наименьшего Rmin расстояний от всех точек реальной поверхности в пределах нормируемого участка L до базовой оси (рис. 2.23, г).
Полное торцовое биение — разность D наибольшего и наименьшего расстояния от точек всей торцовой поверхности до плоскости, перпендикулярной базовой оси (рис. 2.23, д).
Отклонение формы заданного профиля – наибольшее отклонение D точек реального профиля, определяемое по нормали к нормируемому профилю в пределах нормируемого участка L (рис. 2.23, е).
Отклонение формы заданной поверхности – наибольшее отклонение D точек реальной поверхности от номинальной поверхности, определяемое по нормали к номинальной поверхности в пределах нормируемых участка L1, L2 (рис. 2.23, ж).
2.4.5. Зависимый и независимый допуск формы и расположения
Допуски расположения или формы, устанавливаемые для валов или отверстий, могут быть зависимыми и независимыми.
Зависимым называется допуск формы или расположения, минимальное значение которого указывается в чертежах или технических требованиях и которое допускается превышать на величину, соответствующую отклонению действительного размера детали от проходного предела (наибольшего предельного размера вала или наименьшего предельного размера отверстия):
Тзав = Тmin +Tдоп ,
где Тmin - минимальная часть допуска, связанная при расчете с допустимым зазором. ; Тдоп - дополнительная часть допуска, зависящая от действительных размеров рассматриваемых поверхностей.
Зависимые допуски расположения устанавливаются для деталей, которые сопрягаются с контрдеталями одновременно по двум и более поверхностям и для которых требования взаимозаменяемости сводятся к обеспечению собираемости, т. е. возможности соединения деталей по всем сопрягаемым поверхностям. Зависимые допуски связаны с зазорами между сопрягаемыми поверхностями, и предельные отклонения их должны быть в соответствии с наименьшим предельным размером охватывающей поверхности (отверстий) и наибольшим предельным размером охватываемой поверхности (валов). Зависимые допуски обычно контролируют комплексными калибрами, являющимися прототипами сопрягаемых деталей. Эти калибры всегда проходные, что гарантирует беспригоночную сборку изделий.
Пример. На рис. 2.24 показана деталь с отверстиями разных размеров Æ20+0,1 и Æ30+0,2 с допуском на соосность Тmin = 0,1 мм. Дополнительная часть допуска определится по выражению Тдоп = D1дейст - D1min + D2дейст - D2min .
При наибольших значениях действительных размеров отверстий Тдоп max = 30,2 –30 + 20,1 –20 = 0,3. При этом Тзав max = 0,1 + 0,3 = 0,4.
Независимым называют допуск расположения (формы), числовое значение которого постоянно для всей совокупности деталей, изготовляемых по данному чертежу, и не зависит от поверхностей. Например, когда необходимо выдержать соосность посадочных гнезд под подшипники качения, ограничить колебание межосевых расстоя-
ний в корпусах редукторов и т. п., следует контролировать собственно расположение осей поверхностей.
Числовые значения допусков формы и расположения поверхностей. Согласно ГОСТу 24643 - 81 для каждого вида допуска формы и расположения поверхностей установлено 16 степеней точности. Числовые значения допусков от одной степени к другой изменяются с коэффициентом возрастания 1,6. В зависимости от соотношения между допуском размера и допусками формы или расположения устанавливают следующие уровни относительной геометрической точности: А — нормальная относительная геометрическая точность (допуски формы или расположения составляют примерно 60 % допуска размера); В—повышенная относительная геометрическая точность (допуски формы или расположения составляют примерно 40 %. допуска размера); С— высокая относительная геометрическая точность (допуски формы или расположения составляют примерно 25 % допуска размера).
Допуски формы цилиндрических поверхностей, соответствующие уровням А, В и С, составляют примерно 30, 20 и 12 % допуска размера, так как допуск формы ограничивает отклонение радиуса, а допуск размера — отклонение диаметра поверхности. Допуски формы и расположения можно ограничивать полем допуска размера. Эти допуски указывают только тогда, когда по функциональным или технологическим причинам они должны быть меньше допусков размера или неуказанных допусков по ГОСТу 25670 - 83.
2.4.6. Обозначение на чертежах допусков формы и расположения
Вид допуска формы и расположения согласно ГОСТу 2.308 – 79* следует обозначать на чертеже знаками (графическими символами), приведенными в табл. 2.7. Знак и числовое значение допуска вписывают в рамку, указывая на первом месте знак, на втором — числовое значение допуска в миллиметрах, на третьем (при необходимости) - буквенное значение базы (баз) или поверхности, с которой связан допуск расположения.
На рис. 2.25 приведены некоторые правила простановки допусков формы и расположения на чертежах: а – допуск и база А относятся к поверхности, а не к оси (стрелку располагают на некотором расстоянии от конца размерной линии); б – допуск и база Б относятся к боковой поверхности резьбы; в – допуск и база В относятся к оси или плоскости симметрии (конец соединительной линии должен совпадать с продолжением размерной линии этого элемента); г – допуск и база Г относятся к оси резьбы; д – допуск и база Д относятся к общей оси; е – допуск относится ко всей поверхности (длине элемента) и на нормируемом участке, который может занимать любое положение на поверхности; ж – выступающее поле допуска (контур выступающей части нормируемого элемента указывают сплошной тонкой линией).
Кроме нанесения отклонений формы и расположения на чертеже иногда применяют текстовые записи в случаях, когда условные обозначения слишком затемняют чертеж или не раскрывают полностью технических требований к изготовлению детали. В текстовой части дается краткое наименование заданного отклонения и буквенное обозначение или наименование параметра (например, поверхности), для которого задаются отклонение и его числовая величина. Если допускаемое отклонение относится к расположению поверхностей, то показываются еще и базы, относительно которых задано отклонение. Примеры обозначений допусков формы и расположения приведены в табл. 2.8.
2.4.7. Неуказанные допуски формы и расположения
Непосредственно в чертеже указывают, как правило, наиболее ответственные допуски формы и расположения поверхностей.
Таблица 2.8
Примеры обозначения допусков формы и расположения на чертежах
| Вид допуска | Условное обозначение | Указание в чертеже текстовой записью |
| Допуск плоскостности | Допуск плоскостности поверхности не более 0,06 мм | |
| Допуск прямолинейности | Допуск прямолинейности поверхности не более 0,25 мм на всей длине и не более 0,1 мм на длине 300 мм | |
| Допуск цилиндричности, круглости и профиля продольного сечения | Допуск цилиндричности поверхности А не более 01 мм, круглости не более 0,004 мм, профиля продольного сечения не более 0,004 мм | |
| Допуск параллельности | Допуск параллельности общей оси отверстий относительно поверхности А не более 0,01 мм | |
| Допуск перпендикулярности и плоскостности |
Б А |
Суммарный допуск перпендикулярности и плоскостности поверхности Б относительно поверхности А 0,2 мм |
| Допуск соосности | Б А |
Допуск соосности поверхностей А и Б Æ 0,2 мм (допуск зависимый в диаметральном выражении) |
| Допуск симметричности (в диаметральном выражении) | Допуск симметричности поверхностей Б относительно оси отверстия Т 0,04 мм | |
| Допуск наклона |
Б 30о А |
Допуск наклона порверхности Б относительно поверхности А 0,1 мм |
| Допуск пересечения осей (в радиусном выражении) | А | Допуск пересечения осей отверстий Т/2 0,06 мм |
| Окончание табл. 2.8 | ||
| Вид допуска | Условное обозначение | Указание в чертеже текстовой записью |
| Позиционный допуск (в диаметральном выражении) |
A 4 отв.Æ…
|
Позиционный допуск осей отверстий А Æ 0,2 мм (допуск зависимый) |
| Допуск полного радиального биения |
В А Б А Б |
Допуск полного радиального биения поверхности В относительно общей оси поверхностей А и Б 0,1 мм |
| Допуск торцового биения | А Б | Допуск торцового биения поверхности Б относительно оси поверхности А 0,1 мм на диаметре 50 мм |
| Допуск формы заданной поверхности | А | Допуск формы заданной поверхности А Т 0,02 |
По ГОСТу 25069 - 81 все показатели точности формы и расположения, установленные в ГОСТе 24642 – 81*, могут быть подразделены на три группы (табл. 2.9).
Таблица 2.9
Классификация неуказанных допусков формы (по ГОСТ 25069 – 81)
| Характеристика точности формы и расположения по ГОСТ 24642-81* | Способ нормирования неуказанных допусков |
|
Плоскостность Прямолинейность Цилиндричность Круглость Профиль продольного сечения Параллельность |
Допускаются любые отклонения в пределах поля допуска размера рассматриваемой поверхности или размера между рассматриваемой поверхностью и базой. Правило действует независимо от ссылок на стандарт |
|
Перпендикулярность Соосность Симметричность Пересечение осей Радиальное биение Торцовое биение |
Установлены числовые значения неуказанных допусков, выбор которых производится по определяющему допуску размера. Неуказанные допуски должны соблюдаться при наличии ссылок на стандарт |
|
Наклон Позиционный допуск ' Полное радиальное биение Полное торцовое биение Форма заданного профиля Форма заданной поверхности |
Неуказанные допуски не установлены. Данные характеристики косвенно ограничиваются другими видами указанных или неуказанных допусков размеров, формы и расположения. При необходимости прямого нормирования их допуски всегда указываются в чертежах |
К первой группе относятся те показатели, отклонения которых допускаются в пределах поля допуска размера рассматриваемого элемента или размера между рассматриваемыми элементами. Это правило основывается на стандартном определении поля допуска размера и поэтому не должно специально оговариваться в чертежах. Его соблюдение не требует обязательного измерения данного отклонения формы или расположения. Необходимо лишь, чтобы контроль соблюдения поля допуска размера производился с учетом возможных отклонений формы и расположения.
Для определения допусков формы и расположения, относящихся ко второй группе, в ГОСТе 25069 – 81 приведены правила их определения и таблицы допусков.
Для их нахождения по приведенным таблицам необходимо определить базы, номинальный размер и определяющий допуск размера.
Правила определения баз
1. Если деталь имеет более двух элементов, для которых установлены одноименные неуказанные допуски расположения или биения, то эти допуски следует относить к одной и той же базе.
2. Если деталь имеет элементы, для которых установлены одноименные указанные и неуказанные допуски расположения или биения, то неуказанные допуски следует относить к той же базе, что и указанные.
3. При определении неуказанного допуска перпендикулярности за базу принимается поверхность (или ее ось), имеющая больший размер в рассматриваемых перпендикулярных направлениях, а при одинаковых размерах - поверхность, имеющая меньшую шероховатость.
4. При определении неуказанного допуска соосности, пересечения осей, радиального или торцового биения за базу принимается ось поверхности, имеющей большую длину, при одинаковых длинах - ось поверхности с допуском диаметра по более точному квалитету, а при одинаковых длинах и квалитетах - ось поверхности с большим диаметром.
5. При определении неуказанного допуска симметричности за базу принимается плоскость (ось) симметрии элемента, имеющего большую длину в плоскости, параллельной плоскости симметрии, при одинаковых длинах - элемента с допуском размера по более точному квалитету в направлении, перпендикулярном плоскости симметрии, а при одинаковых длинах и квалитетах - элемента с большим размером в направлении, перпендикулярном плоскости симметрии.
Правила определения номинального размера
Под номинальным размером понимается: при определении неуказанных допусков перпендикулярности - номинальная длина рассматриваемого элемента; соосности, пересечения осей, радиального биения и симметричности - больший из номинальных размеров рассматриваемого или базового элемента; торцового биения - номинальный диаметр рассматриваемой торцовой поверхности.
Правила определения определяющего допуска размера
Под определяющим допуском размера понимается:
1. При определении неуказанного допуска перпендикулярности или торцового биения - допуск размера, координирующего расположение рассматриваемого элемента в направлении, параллельном базовому элементу. Если имеется несколько таких размеров различной точности, то выбор неуказанного допуска перпендикулярности или торцового биения производится по более точному квалитету.
2. При определении неуказанного допуска соосности, симметричности, пересечения осей или радиального биения - допуск диаметра рассматриваемого или базового элемента по более грубому квалитету.
Примеры. Определить неуказанные допуски соосности поверхности 1, перпендикулярности поверхностей 2 и 3 и биения поверхности 4 по чертежу, приведенному на рис. 2.26.
1. Соосность поверхности 1 относительно базовой. За базу принимаем ось поверхности А (согласно п. 1.2). Номинальный размер - Æ60 как больший из номинальных размеров рассматриваемого и базового элемента. Определяющий допуск размера - IT14 как допуск диаметра рассматриваемого или базового элемента по более грубому квалитету. Неуказанный допуск соосности согласно ГОСТу 25069 - 81 - 0,40 мм.
2. Перпендикулярность поверхностей 2 и 3. За базу принимаем поверхность 2 как поверхность, имеющую больший размер. Номинальный размер - 60 как номинальная длина рассматриваемого элемента. Определяющий допуск - IT14 как допуск размера 100, координирующего расположение рассматриваемого элемента в направлении, параллельном базовому элементу. Неуказанный допуск перпендикулярности согласно ГОСТу 25069 - 81 - 0,25 мм.
3. Торцовое биение поверхности 4 относительно базовой. За базу принимаем ось поверхности А (согласно п. 1.2). Номинальный размер - 100 как номинальный размер рассматриваемой торцовой поверхности. Определяющий допуск размера - IT14 как допуск размера 90, координирующего расположение рассматриваемого элемента в направлении, параллельном базовому элементу. Неуказанный допуск торцового биения согласно ГОСТу 25069 - 81 - 0,12 мм.
К третьей группе (см. табл. 2.9) относятся показатели, которые нормируются лишь при необходимости и только с помощью указанных в чертеже допусков. При неуказанных допусках эти показатели косвенно ограничиваются допусками других параметров. Например, при неуказанных позиционных допусках точность расположения осей определяется предельными отклонениями межосевых расстояний.
2.5. Волнистость поверхности
Под волнистостью поверхности понимают совокупность периодически повторяющихся неровностей, у которых расстояния между смежными возвышенностями или впадинами превышают базовую длину l. Волнистость занимает промежуточное положение между отклонениями формы и шероховатостью поверхности. Условно границу между различными порядками отклонений поверхности можно установить по значению отношения шага Sw к высоте неровностей Wz. При (Sw/Wz) < 40 отклонения относят к шероховатости поверхности, при 1000 ³(Sw/Wz) ³ 40 — к волнистости, при (Sw/Wz) > 1000 —к отклонениям формы.
Параметры волнистости установлены рекомендацией СЭВ (РС 3951 - 73).
Высота волнистости Wz = (1/5)×(W1+W2+W3+W4+W5).
Наибольшая высота волнистости Wmax — расстояние между наивысшей и наинизшей точками измеренного профиля в пределах длины Lw, измеренное на одной полной волне.
Средний шаг волнистости (рис. 2.27,
б) ![]() .
.
2.6. Система допусков и посадок для подшипников качения
Подшипники качения обладают полной внешней взаимозаменяемостью по присоединительным размерам и неполной внутренней между телами качения и кольцами. Комплекты шариков, роликов и кольца подшипников подбирают селективным методом.
Термины и определения, установленные ГОСТом 25256 - 82 в области допусков на подшипники качения, их детали и отдельные элементы, обязательны для применения в документации, всех видов научно-технической, учебной и справочной литературы.
Основные присоединительные размеры подшипников качения, по которым они монтируются на валах (осях) и в корпусах (корпусных деталях) машин и приборов, установлены ГОСТом 520 – 89*:
d - диаметр отверстия внутреннего кольца радиальных и радиально-упорных подшипников или тугого кольца одинарных упорных подшипников.;
dm = 0,5(dmin + dmax) - средний диаметр отверстия внутреннего кольца, причем dmin и dmax - наибольшее и наименьшее значения диаметра d, определенные двухточечным измерением в одной радиальной плоскости (перпендикулярной оси);
d1 — диаметр отверстия тугого кольца двойных упорных подшипников;
D — наружный диаметр наружного кольца радиальных и радиально-упорных подшипников или свободного кольца упорных подшипников;
Dm = 0,5(Dmin + Dmax) — средний наружный диаметр наружного кольца, причем Dmin и Dmax - наибольшее и наименьшее значения диаметра D, определенные двухточечным измерением в одной радиальной плоскости (перпендикулярной оси).
Допуски подшипников качения. Качество подшипников при прочих равных условиях определяется: 1) точностью присоединительных размеров и ширины колец, а для роликовых радиально-упорных подшипников еще и точностью монтажной высоты; точностью формы и взаимного расположения поверхностей колец подшипников и их шероховатости; точностью формы и размеров тел качения в одном подшипнике и шероховатостью их поверхностей; 2) точностью вращения, характеризуемой радиальным и осевым биениями дорожек качения и торцов колец.
По ГОСТу 520 – 89* установлены девять классов точности, обозначаемых в порядке ее возрастания 8; 7; 0; 6Х, 6; 5; 4; 2; Т. Классы точности 8 и 7 изготавливаются по заказу потребителя.
Поле допуска диаметра отверстия и наружного диаметра подшипника расположено вниз от нулевой линии. В большинстве узлов машин применяют подшипники качения класса точности 0. При повышенных требованиях к точности вращения следует выбирать подшипники более высокого класса точности.
В зависимости от требований по уровню вибрации, волнистости и отклонений по круглости поверхности качения устанавливаются три категории А, В, С.
Категория А включает классы точности 5, 4, 2, Т и дополнительно регламентирует: момент трения; угол контакта; осевое и радиальное биение, соответствующее следующему более точному классу точности.
Категория В включает классы точности 0, 6Х, 6, 5 с дополнительными требованиями по моменту трения; углу контакта; осевому и радиальному биению, соответствующему следующему более точному классу точности.
Категория С включает классы точности 8, 7, 0, 6, к которым не предъявляются требования по уровню вибрации, моменту трения и др.
Выбор посадок подшипников качения. Посадку подшипника качения на вал и в корпус выбирают в зависимости от типа и размера подшипника, условий его эксплуатации, значения и характера действующих на него нагрузок и вида нагружения колец. Согласно ГОСТу 3325 – 85* различают три основных вида нагружения колец: местное, циркуляционное и колебательное.
При местном нагружении кольцо воспринимает постоянную по направлению результирующую радиальную нагрузку Fr (например, натяжение приводного ремня, сила тяжести конструкции) лишь ограниченным участком окружности дорожки качения и передает ее соответствующему ограниченному участку посадочной поверхности вала или корпуса. Такое нагружение возникает, например, когда кольцо не вращается относительно нагрузки (рис. 2.28, а).
При циркуляционном нагружении кольцо воспринимает результирующую радиальную нагрузку Fr последовательно всей окружностью дорожки качения и передает ее всей посадочной поверхности вала или корпуса. Такое нагружение кольца получается при его вращении и постоянно направленной нагрузке Fr или, наоборот, при радиальной нагрузке Fc, вращающейся относительно рассматриваемого кольца (рис. 2.28, б).
При колебательном нагружении невращающееся кольцо воспринимает равнодействующую Fr+c двух радиальных нагрузок (Fr — постоянна по направлению, Fc вращается, причем Fr > Fc) ограниченным участком окружности дорожки качения и передает ее соответствующему ограниченному участку посадочной поверхности вала или корпуса. Равнодействующая нагрузка Fr+c не совершает полного оборота, а колеблется между точками А и В (рис. 2.28, в). Посадки следует выбирать так, чтобы вращающееся кольцо подшипника было смонтировано с натягом, исключающим возможность обкатки и проскальзывания этого кольца по посадочной поверхности вала или отверстия в корпусе в процессе работы под нагрузкой; другое кольцо должно быть установлено с зазором. Следовательно, при вращающемся вале соединение внутреннего кольца с валом должно быть неподвижным, а наружное кольцо установлено в корпусе с небольшим зазором; при неподвижном вале соединение внутреннего кольца с валом должно иметь посадку с небольшим зазором, а наружного кольца с корпусом должно быть неподвижным. Рекомендуемые посадки для подшипников качения и примеры их применения приведены в ГОСТе 3325 – 85*.
Варианты видов нагружения колец шарико- и роликоподшипников приведены в табл. 2.10.
Таблица 2.10
Варианты нагружения колец шарико- и роликоподшипников
по ГОСТу 3325 – 85*
| Радиальная нагрузка, воспринимаемая подшипником | Вращающееся кольцо | Вид нагружения колец | |
| внутреннего | наружного | ||
| Постоянная по направлению | Внутреннее | Циркуляционное | Местное |
| Наружное | Местное | Циркуляционное | |
| Постоянная по направлению и вращающаяся – меньшая по величине | Внутреннее | Циркуляционное | Колебательное |
| Наружное | Колебательное | Циркуляционное | |
| Постоянная по направлению и вращающаяся – большая по величине | Внутреннее | Местное | Циркуляционное |
| Наружное | Циркуляционное | Местное | |
| Постоянная по направлению | Внутреннее и наружное кольца в одном или противоположных направлениях | Циркуляционное | Циркуляционное |
| Вращающаяся с внутренним кольцом | Местное | Циркуляционное | |
| Вращающаяся с наружным кольцом | Циркуляционное | Местное |
Циркуляционно нагруженные кольца должны иметь неподвижную посадку, которая назначается в зависимости от величины и интенсивности нагрузки Рr на посадочной поверхности кольца:
![]() ,
,
где Fr – радиальная нагрузка на подшипник, кН; b – рабочая ширина посадочного
места, м; k1 - динамический коэффициент посадки (при нагрузке с умеренными
толчками и вибрациями k1 = 1,0; при сильных ударах и вибрациях k1 = 1,8); k
2 - коэффициент, учитывающий снижение посадочного натяга (при полом вале или
тонкостенном корпусе k2 >
1, при сплошном вале и толстостенном корпусе k2 = 1); k3 – коэффициент
неравномерности распределения радиальной нагрузки (Fr) между рядами роликов в
двухрядных конических роликоподшипниках или между сдвоенными шарикоподшипниками
при наличии осевой силы Fa на опору. Значения k3, зависящие от  , где b - угол контакта тел
качения с дорожкой качения наружного кольца. Для радиальных и радиально-упорных
подшипников при расположении тел качения в один ряд k3 =1. По подсчитанной
интенсивности нагрузки Pr выбирается посадка.
, где b - угол контакта тел
качения с дорожкой качения наружного кольца. Для радиальных и радиально-упорных
подшипников при расположении тел качения в один ряд k3 =1. По подсчитанной
интенсивности нагрузки Pr выбирается посадка.
Колебательно нагруженные кольца подшипников устанавливаются в корпус с основными отклонениями k и JS, а на вал – с отклонениями k, jS, h. Точность выполнения посадочных поверхностей в корпусе и на валу определяется классом точности подшипника. Для классов точности 0 и 6 рекомендуется для валов назначить квалитет IT6, а для отверстий – IT7, для классов точности 2, 4 и 5 – соответственно IT5 и IT6.
Пример. Для подшипника качения № 6-304 (d = 20 мм; D = 52 мм; B = 15 мм;
r = 2 мм) 6-го класса точности, нагруженного Fr = 6000 H, ![]() . Вращающаяся деталь –
вал, вид нагрузки – с умеренными толчками.
. Вращающаяся деталь –
вал, вид нагрузки – с умеренными толчками.
Решение
1. При вращающемся вале и постоянно действующей силе Fr внутреннее кольцо нагружено циркуляционной, а наружное – местной нагрузками.
2. Интенсивность нагрузки

где k1 = 1; k2 = 1,6; k3 = 1. [10]; b = b-2r = 15 – 4 = 11мм.
3. При Рr = 873 кН/м по [10] для вала выбираем поле допуска k6, для отверстия в корпусе поле допуска Н7.
4. Схемы полей допусков приведены на рис.2.29.
5. По ГОСТу 3325 – 85* принимаем допуски круглости, профиля продольного сечения, торцевого биения и шероховатость вала и отверстия.
6. Для длины участка вала под подшипник назначаем неуказанные предельные отклонения по “среднему” классу точности (ГОСТу 25670-83).
Эскизы подшипникового узла, вала и отверстия приведены на рис.2.30.
Условные обозначения подшипников. Система условных обозначений шарико- и роликоподшипников установлена ГОСТом 3189 - 89. Условное обозначение подшипника дает полное представление о его габаритных размерах, конструкции, точности изготовления, термообработке, величине зазора и т. п.
Полное условное обозначение подшипника состоит из основного и дополнительного.
Основное условное обозначение включает в себя семь цифр (рис. 2.31).
Пример условного обозначения подшипника роликового двухрядного с короткими цилиндрическими роликами типа 182000 (с коническим отверстием внутреннего кольца с бортами на внутреннем кольце), серии диаметров 1, серии ширин 3 с d = 100 мм, D = 150 мм, В=37 мм:
Подшипник 3182120 ГОСТ 7634 – 75*.
Пример условного обозначения подшипника с учетом его точности. Подшипник обозначен А 125 – 205, где А – категория; 1 – ряд момента трения; 2 – группа радиального зазора; 5 – класс точности.
В обозначении А 25 – 205 – нет требований по моменту трения. В обозначении А 5 – 205 – нет требований по моменту трения и по радиальному зазору.
2.7. Допуски на угловые размеры. Взаимозаменяемость конических соединений
Все нормальные углы, применяемые при конструировании, можно разделить на три группы: 1) нормальные углы общего назначения (наиболее распространенные); 2) нормальные углы специального назначения (в стандартизованных специальных деталях); 3) специальные углы (углы, размеры которых связаны расчетными зависимостями с другими принятыми размерами и которые нельзя округлить до нормальных углов; углы, определяемые специфическими эксплуатационными или технологическими требованиями). Размеры углов 1-й группы приведены в ГОСТе 8908 – 81 и ГОСТ 8593 - 81. Размеры углов 2-й группы — в [10].
2.7.1. Допуски угловых размеров
Допуски угловых размеров назначают по ГОСТу 8908 – 81. Допуски углов AT (от англ. Angle toleranc – допуск угла) должны назначаться в зависимости от номинальной длины L1 меньшей стороны угла. Допуск угла может выражаться: 1) в угловых единицах радианной и градусной мер АТa (точное значение) и АТ¢a (округленное значение допуска в градусной мере (рис. 2.32, а и б); 2) длиной противолежащего отрезка на перпендиляре к стороне угла на расстоянии L1 от вершины (этот отрезок приближенно равен дуге с радиусом L1) АТh (рис. 2.32); 3) допуском на разность диаметров в двух сечениях конуса на расстоянии L между ними АТD (рис. 2,32, б).
Допуски углов конусов с конусностью не более 1 : 3 должны назначаться в зависимости от номинальной длины конуса L (разность между длиной конуса и образующей в этом случае не более 2%). При большей конусности допуски назначаются в зависимости длины образующей конуса L1. Связь между допусками в угловых и линейных единицах выражается следующей формулой:
АТh = АТa× L1×10-3 ,
где АТh выражается в мкм; АТa - в мкрад; L1 - в мм.
Для малых углов (С £ 1 : 3) АТD » АТh .
Для конусов с конусностью более
1 : 3 значения АТD определяют по форму-ле
АТD = АТh × cos a/2,
где a - номинальный угол конуса.
Для допусков углов установлено 17 степеней точности. Степени точности выше 1-ой – 01 и 0 – перспективные (для измерительных устройств высшей точности); 1 – 5 – для калибров; 5 – 7 – для сопряжений.
2.7.2. Система допусков и посадок для конических соединений
Коническое соединение по сравнению с цилиндрическим имеет преимущества: можно регулировать величину зазора или натяга относительным смещением деталей вдоль оси; при неподвижном соединении с натягом возможна частая разборка и сборка сборочных единиц (узлов); конические соединения обеспечивают хорошее центрирование деталей и герметичность.
Основные параметры конусов приведены на рис. 2.33.
Угол a/2 между образующей конуса и осью называется углом наклона, а угол a— углом конуса. Отношение разности D – d к длине конуса L равно 2tga/2 и называется конусностью С.
![]() .
.
Уклон i = C/2 = tg a/2. Основная плоскость – плоскость поперечного сече-ния конуса, в которой задают номинальный диаметр конуса (D или d). Базовая плоскость – плоскость, служащая для определения положения ос-новной плоскости (или дан-ного конуса относительно сопрягаемого с ним конуса).
Базорасстояние конуса Ze, Z i – осевое расстояние между основной и базовой плоскостями соответственно для наружного и внутреннего конусов.
Для конусов устанавливают допуски: диаметра конуса в любом сечении ТD, в заданном сечении ТDS; угла конуса АТ, формы конуса (допуск круглости ТFR и допуск прямолинейности образующей ТFL).
Допуски конусов деталей нормируют двумя способами:
1) совместным нормированием всех видов допусков допуском диаметра ТD, одинаковым в любом поперечном сечении конуса; этот допуск ограничивает не только отклонение диаметра, но и отклонения угла и формы конуса, если эти отклонения не ограничены меньшими допусками;
2) раздельным нормированием каждого вида допусков: ТDS - допуск в заданном сечении конуса - по ГОСТу 25307-82, АТ (в угловых АТa или линейных АТD единицах) - по ГОСТу 8908 - 81, ТFR и ТFL - по ГОСТу 24643-81.
По способу фиксации осевого расположения сопрягаемых конусов посадки подразделяют:
1) путем совмещения конструктивных элементов конусов (базовых плоскостей) (рис. 2.34, а); при этом способе фиксации возможно получение посадок с зазором, переходных и с натягом;
2) по заданному осевому расстоянию Zpf между базовыми плоскостями (рис. 2.34, б); при этом способе фиксации возможно получение посадок с зазором, переходных и с натягом;
3) по заданному осевому смещению Ea конусов от их начального положения (рис. 2.34, в); при этом способе фиксации обеспечивается получение посадок с зазором и с натягом;
4) по заданному усилию запрессовки FS, прилагаемому в начальном положении сопрягаемых конусов (рис.2.34, г); при этом способе фиксации возможно получение посадок с натягом.
В посадках с фиксацией путем совмещения конструктивных элементов и по заданному осевому расстоянию между базовыми плоскостями (см. рис.2.34, а и б) допуски конусов предпочтительно нормировать 1-м способом, поскольку в этих посадках величины зазоров или натягов зависят от предельных отклонений диаметров сопрягаемых конусов. В посадках с фиксацией по заданному осевому смещению или по заданному усилию запрессовки (см. рис. 2.34, в и г)допуски конусов предпочтительно нормировать 2-м способом, т.к. в этих посадках величины зазоров или натягов определяются условиями сборки. На неравномерность зазоров или натягов и на длину контакта оказывают влияние только допуски угла и формы конуса, допуски диаметра влияют на базорасстояние соединения
На рис. 2.35 представлены эскизы конического соединения, а также наружного и внутреннего конусов с допусками, проставленными по ГОСТу 2.320 – 82.
Подробный расчет соотношения между допусками диаметра, угла и формы конуса, а также предельных базорасстояний конических соединений приведен в ГОСТе 25307 – 82 и в [10].
2.8. Взаимозаменяемость резьбовых соединений
Резьбовые соединения широко используются в конструкциях машин, аппаратов, приборов, инструментов и приспособлений различных отраслей промышленности.
Классификация резьб. По назначению резьбы разделяют на: 1) общие и 2) специальные. К резьбам общего назначения относятся резьбы, предназначенные для применения в любых отраслях промышленности, например, резьбы крепежные для скрепления деталей и регулировочных устройств; резьбы для преобразования движений в различных винтовых механизмах; трубные и арматурные резьбы для плотного (герметичного) соединения изделий (труб, арматуры и т. д.). Резьбами специального назначения называют такие, которые применяют только в определенных изделиях некоторых отраслей промышленности (например, резьба для цоколей и патронов электрических ламп, резьба для противогаза, окулярная резьба для оптических приборов и т. д.).
По профилю витков (виду контура осевого сечения) резьбы подразделяют на: 1) треугольные, 2) трапецеидальные, 3) упорные (пилообразные), 4) прямоугольные, 5) круглые.
По числу заходов – на: 1) однозаходные и 2) многозаходные (двухзаходные, трехзаходные и т. д.).
По форме поверхностей, на которой нарезана резьба - на: 1) цилиндрические и 2) конические.
В зависимости от направления вращения контура осевого сечения — на: 1) правые и 2) левые резьбы.
По принятой единице измерения линейных размеров — на: 1) метрические и 2) дюймовые.
2.8.1. Основные параметры метрической крепежной резьбы
Параметры цилиндрической резьбы (рис. 2.36, а): средний d2 (D2); наружный d (D) и внутренний d1 (D1) диаметры наружной (внутренней) резьбы; шаг Р (для многозаходной резьбы ход Рh = Рn, где n — число заходов); угол профиля a; высота исходного треугольника Н; длина свинчивания l, рабочая высота профиля Н1 и номинальный радиус закругления впадины резьбы болта R. Профиль, номинальные размеры диаметров, а также параметры Р, a, и Н1 являются общими как для наружной (болта, шпильки, винта и др.), так и внутренней (гайки, гнезда и др.) резьб.
Профиль метрической резьбы для диаметров от 0,25 до 600 мм и размеры его элементов (Н = 0,8660254Р; Н1 = (5/8) Н = 0,541265877Р; R = H/6 = 0,144337567P) регламентированы ГОСТом 9150 - 81, который предусматривает срезы вершин резьбы, равные Н/4 у гайки и Н/8 у болта.
Впадины наружной резьбы выполняют плоскосрезанными или закругленными. При плоскосрезанной форме реальный профиль впадины должен быть расположен между линиями плоского среза на расстоянии Н/4 и Н/8 от вершины исходного треугольника, т. е. в зоне А (рис. 2.36, б). При закругленной форме впадины резьбы, которая является предпочтительной, радиус кривизны ни в одной точке не должен быть менее 0,1Р (рис. 2.36, в), а ее профиль должен находиться в зоне Б. При высоких требованиях к прочности резьбы допускается устанавливать Rmin = 0,125Р. Форма впадины резьбы гайки не регламентируется.
Форма впадины резьбы влияет на циклическую долговечность болтов. Наименьшую циклическую долговечность имеют болты с плоской впадиной профиля, наибольшую — с впадиной, очерченной радиусом R = H/4 » 0,216Р (при закругленной впадине резьбы значительно уменьшается концентрация напряжений).
2.8.2. Общие принципы взаимозаменяемости цилиндрических резьб
Системы допусков и посадок, обеспечивающих взаимозаменяемость метрической, трапецеидальной, упорной, трубной и других цилиндрических резьб, построены на едином принципе: они учитывают наличие взаимосвязи погрешностей отдельных параметров резьбы.
Для обеспечения требований взаимозаменяемости свинчиваемых изделий устанавливают предельные контуры резьбы болта и гайки (рис. 2.36, а). Свинчиваемость резьбовых деталей и требуемое качество соединения обеспечиваются, если действительные контуры болта и гайки не будут выходить за соответствующие предельные контуры на всей длине свинчивания.
Посадки резьбовых соединений (для резьб общего назначения и большинства специальных резьб) определяются в основном характером соединений по боковым сторонам профиля. Расположение полей допусков наружного и внутреннего диаметров исключает возможность получения натяга по вершинам и впадинам резьбы.
Отклонения шага и угла профиля резьбы и их диаметральная компенсация. У всех цилиндрических резьб с прямолинейными боковыми сторонами профиля отклонения шага и угла профиля для обеспечения свинчивания могут быть скомпенсированы соответствующим изменением действительного среднего диаметра резьбы.
Отклонение шага состоит из прогрессивных погрешностей шага, пропорциональных числу витков резьбы на длине свинчивания l, периодических, изменяющихся по периодическому закону, и местных, не зависящих от числа витков резьбы на длине свинчивания. Обычно прогрессивные погрешности шага превышают местные.
При наложении на осевое сечение резьбы гайки, имеющей номинальные профиль и размеры, осевого сечения резьбы болта, у которого на длине свинчивания шаг увеличен на DРn (рис. 2.37), получим перекрытие правых боковых сторон EF профиля резьбы болта и CD профиля резьбы гайки (при совмещенных левых сторонах по линии АВ). В результате эти детали не свинчиваются.
Свинчивание резьбовых деталей, имеющих погрешность шага резьбы, возможно только при уменьшении среднего диаметра резьбы болта или увеличения среднего диаметра резьбы гайки. При уменьшении среднего диаметра резьбы болта на fp профиль его резьбы сместится из положения ЕF в положение Е'F', т. е. свинчивание станет возможным. Величину fp называют диаметральной компенсацией погрешностей шага резьбы.
Из треугольника а'b'с', в котором b'с' = 0,5fp, найдем
0,5fp==0,5×DРn×ctga/2, или fp = DРn×ctga/2.
При несимметричном профиле  ,
,
где g и b - углы профиля резьбы.
Диаметральную компенсацию погрешностей шага необходимо определять исходя из абсолютного значения наибольшего отклонения DРn (накопленной или местной погрешности шага), которая может быть как положительной, так и отрицательной.
При анализе погрешностей угла профиля резьбы обычно измеряют не угол a, а половину угла профиля a/2, которая для метрической резьбы равна 30°. Измеряя a/2, можно установить не только величину a, но и перекос резьбы.
Отклонением половины угла профиля резьбы Da/2 болта или гайки (для резьб с симметричным профилем) называют разность между действительными и номинальными значениями a/2. Эта погрешность может быть вызвана погрешностью полного угла профиля (при равенстве половин угла), перекосом профиля относительно оси детали (когда биссектриса угла симметричного профиля неперпендикулярна оси резьбы) и сочетанием обоих факторов.
Отклонение Da/2 при симметричном профиле резьбы находят как среднее арифметическое абсолютных значений отклонений обеих половин угла профиля: Da/2 = 0,5[(êD(a/2)прê+êD(a/2)левê].
На рис. 2.38 показано сечение резьбы гайки с номинальным профилем 1, на которое наложено сечение резьбы болта 2, имеющего погрешность половины угла профиля Da/2. При равенстве диаметров резьбы болта и
гайки свинчивание этих деталей невозможно вследствие перекрытия профилей резьбы (зона 3). Свинчивание возможно только при наличии необходимого зазора по средним диаметрам, т. е. диаметральной компенсации fa этой погрешности, которая может быть получена в результате уменьшения среднего диаметра резьбы болта или увеличения среднего диаметра резьбы гайки.
Величину fa можно найти из треугольника DEF.
Применив теорему синусов, получим:
 ,
,
где EF = 0,5 fa ; ED = h/соs (Da/2).
После преобразования получим fa = (4h×Da/2)/sina/2 , где Da/2 — в радианах; h и fa в — в миллиметрах. Если Da/2 выразить в угловых минутах, fa - в микрометрах, а h - через шаг резьбы (h = 0,2165Р), то:
![]() .
.
Приведенный средний диаметр резьбы. Значение среднего диаметра резьбы, увеличенное для наружной или уменьшенное для внутренней резьбы на суммарную диаметральную компенсацию отклонений шага и угла наклона боковой стороны профиля, называют приведенным средним диаметром.
Для наружной резьбы d2пр = d2изм +fp + fa ;
для внутренней - D2пр = D2изм - fp - fa.
Здесь d2изм и D2изм —измеренные (действительные) значения среднего диаметра наружной и внутренней резьб. При этом в формулу для определения d2пр fp и fa всегда входят со знаком плюс, а в формулу для D2пр - со знаком минус.
При точном определении значения приведенного диаметра необходимо учитывать отклонения формы боковых поверхностей и другие погрешности резьб.
При наличии погрешностей шага и половины угла профиля резьбы у обеих деталей получаемый в соединении зазор определяется разностью действительных значений приведенных средних диаметров внутренней и наружной резьбы.
Суммарный допуск среднего диаметра резьбы. Вследствие взаимосвязи между отклонениями шага, угла профиля и собственно среднего диаметра допускаемые отклонения этих параметров раздельно не нормируют (за исключением резьб с натягом, резьб калибров и инструмента). Устанавливают только суммарный допуск на средний диаметр болта Td2 и гайки ТD2, который включает допускаемое отклонение собственно среднего диаметра Dd2 (DD2) и диаметральные компенсации погрешности шага и угла профиля:
Td2(ТD2) = Dd2 (DD2) + fp + fa .
Верхний предел суммарного допуска среднего диаметра наружной резьбы ограничивает приведенный средний диаметр d2пр max, а нижний предел - средний диаметр d2min . Для внутренней резьбы - это допуск, нижний предел которого ограничивает приведенный средний диаметр D2пр min, а верхний предел - средний диаметр D2max.
2.8.3. Допуски и посадки резьб с зазором
Допуски метрических резьб с крупными и мелкими шагами для диаметров 1 - 600 мм регламентированы ГОСТом 16093 – 81. Этот стандарт устанавливает предельные отклонения диаметров резьбы в посадках типа скользящих и с зазорами (рис. 2.39).
Установлены ряды основных отклонений: для болтов h, g, f, e, d; для гаек H, G, E, F.
Основные отклонения, определяющие положение полей допусков относительно номинального профиля, зависят только от шага резьбы (кроме h и Н). Для резьбы с данным шагом одноименные основные отклонения для всех (наружного, среднего, внутреннего) диаметров равны (например, g для d, d2 и d1).
Численные значения основных отклонений рассчитываются по формулам: для наружной резьбы: esd = -(80 + 11P);
ese = -(50 + 11P);
esf = -(30 + 11P);
esg = -(15 + 11P);
esh = 0;
для внутренней резьбы:
EIE = (50 + 11P);
EIF = (30 + 11P);
EIG = (15 + 11P);
EIH = 0,
где es и EI – верхнее и нижнее отклонения, мкм; Р – шаг резьбы, мм.
Установлены также следующие степени точности, определяющие значения допусков диаметров наружной и внутренней резьбы:
диаметры болта: наружный d 4, 6, 8;
средний d2 3, 4, 5, 6, 7, 8, 9, 10*;
диаметры гайки: внутренний D1 4, 5, 6, 7, 8;
средний D2 4, 5, 6, 7, 8, 9*.
Примечание. Степени 9* и 10* применяются только для резьб на деталях из пластмасс.
Основным рядом допусков для всех диаметров резьб является 6-я степень точности. Допуски по 6-ой степени точности определяются по формулам:
для наружного диаметра болтов ![]() ;
;
для внутреннего диаметра гаек TD1(6) = 433P – 190×P1,22 при P £ 0,8 мм; TD1(6) = 230P0,7 при P ³ 1 мм;
для среднего диаметра болтов Td2(6) = 90P0,4 ×d0,1;
для среднего диаметра гаек TD2(6) = 1,32Td2(6),
(где Р и d – в мм; Т – в мкм).
Допуски остальных степеней точности определяются умножением допуска 6-ой степени точности на следующие коэффициенты:
Степень точности . . . . . . . . . . . 3 4 5 7 8 9 10
Коэффициент . . . . . . . . . . . . . . 0,5 0,63 0,8 1,25 1,6 2 2,5.
В зависимости от длины свинчивания резьбы разделены на три группы: малые S - длины свинчивания до 2,24Р×d0,2; нормальные N – длины от 2,24Р×d0,2 до 6,7Р×d0,2; большие L – длины свинчивания свыше 6,7Р×d0,2.
В зависимости от точности резьбового соединения установлены три класса точности: точный, средний и грубый (табл. 2.11).
Таблица 2.11
Поля допусков болтов и гаек
| Длина свинчивания | Класс точноcти | Поля допусков гаек | Поля допусков болтов | |||
| Отклонение H | Отклонение G | Отклонение h | Отклонение g | Отклонение d, e, f | ||
| S | Точный | 4H | - | (3h4h) | - | - |
| Средний | 5H | 5G | (5h6h) | 5g6g | - | |
| Грубый | - | - | - | - | - | |
| N | Точный | 5H | - | 4h | 4g | - |
| Средний | 6H | 6G | 6h | 6g | 6d, 6e, 6f | |
| Грубый | 7H | 7G | 8h | 8g | - | |
| L | Точный | 6H | - | (5h4h) | - | - |
| Средний | 7H | (7G) | (7h6h) | 7g6g | (7e6e) | |
| Грубый | 8H | (8G) | - | (9g8g) | - |
Для стандартизованных полей допусков задаются предельные отклонения для резьбы болтов: верхнее — для наружного d, среднего d2 и внутреннего d1 диаметров; нижнее — для наружного d и среднего d2 диаметров. Для внутреннего диаметра резьбы болта нижнее отклонение не регламентируется, но косвенно ограничивается формой впадины болта. При неоговоренной форме впадины оно не должно выходить за линию плоского среза на расстоянии Н/8 от вершины остроугольного профиля (см. рис. 2.36, б). При закругленной впадине резьбы болта радиус кривизны впадины ни в одной из точек не должен быть менее 0,1Р (см. рис. 2.36, в).
Для резьбы гаек задаются следующие предельные отклонения: нижнее для всех трех диаметров (D, D1, D2), верхнее — для среднего D2 и внутреннего D1 диаметров.
Обозначение точности и посадок резьбы. Обозначение поля допуска диаметра резьбы состоит из цифры, показывающей степень точности, и буквы, обозначающей основное отклонение (например, 6h, 6g, 6Н).
Обозначение поля допуска резьбы состоит из обозначения поля допуска среднего диаметра, помещаемого на первом месте, и обозначения поля допуска диаметра выступов (например, 7g6g; 5Н6Н). Если обозначение поля допуска диаметра выступов совпадает с обозначением поля допуска среднего диаметра, его в обозначении поля допуска резьбы не повторяют (например, 6g, 6Н). Если длина свинчивания отличается от нормальной, ее указывают в обозначении резьбы.
Примеры. М24х1,5 – 7g6g – R – 50 (резьба метрическая: наружный диаметр 24 мм; шаг 1,5 мм; поле допуска на средний диаметр 7g; поле допуска на наружный диаметр 6g; R - резьба с закругленной впадиной; длина свинчивания 50 мм).
М12х1LH – 6H/6g (LH - резьба левая; 6Н – поля допусков среднего и внутреннего диаметров гайки; 6g – поля допусков среднего и наружного диаметров болта).
2.8.4. Допуски резьб с натягом и с переходными посадками
Рассматриваемые посадки служат главным образом для соединения шпилек с корпусными деталями, если нельзя применить соединения винтовое или типа болт — гайка. Эти посадки применяют в крепежных соединениях, работающих при ударах, вибрациях, колебаниях температуры, для центрирования деталей на резьбе и т. д.
Посадки с натягом и переходные должны обеспечивать неподвижность собранных деталей, исключающую самоотвинчивание шпилек и возможность вывинчивания их из гнезда под действием моментов, возникающих на другом конце шпилек при отвинчивании гаек. Натяги создаются только по боковым сторонам профиля, т. е. по средним диаметрам сопрягаемых резьб; по наружным и внутренним диаметрам предусматриваются зазоры (рис. 2.40, а). Резьбовые соединения с натягом требуют ограничения допусков на диаметры d2 и D2 и, следовательно, допуска натяга.
ГОСТ 4608 – 81* предусматривает
посадки с натягом только в системе отверстия. Посадки 
 ,
,  и
и  должны осуществляться с
сортировкой наружной и внутренней резьб по собственно среднему диаметру в
средней части резьбы на группы. Число групп (две или три) указано в скобках. Сборка
резьбовых деталей (шпильки, гнезда) должна осуществляться из одноименных
сортировочных групп по схеме, показанной на рис. 2.40, б. Посадки
должны осуществляться с
сортировкой наружной и внутренней резьб по собственно среднему диаметру в
средней части резьбы на группы. Число групп (две или три) указано в скобках. Сборка
резьбовых деталей (шпильки, гнезда) должна осуществляться из одноименных
сортировочных групп по схеме, показанной на рис. 2.40, б. Посадки ![]() и
и ![]() осуществляются
без сортировки. Допускается применение посадок 3Н6Н/3р и 3Н6Н/3n без сортировки
на группы. Указанные посадки относятся к переходным и их применение требует
дополнительной проверки.
осуществляются
без сортировки. Допускается применение посадок 3Н6Н/3р и 3Н6Н/3n без сортировки
на группы. Указанные посадки относятся к переходным и их применение требует
дополнительной проверки.
Допуски среднего диаметра резьбы деталей, сортируемых на группы, не включают диаметральных компенсаций отклонений шага и угла наклона боковой стороны профиля. В этом случае на шаг и угол профиля предусмотрены допуски, которые контролируются только у шпилек, для гнезд эти отклонения обеспечивают при изготовлении резьбообразующего инструмента соответствующей точности.
Предельные отклонения внутреннего диаметра наружной резьбы по дну впадины d3 не устанавливаются. Они ограничиваются положением поля допуска среднего диаметра d2 и предельными отклонениями формы впадины наружной резьбы.
Резьбы с переходными посадками применяют при одновременном дополнительном
заклинивании шпилек по коническому сбегу резьбы, по плоскому бурту и цилиндрической
цапфе. По ГОСТу 24834 – 81* предусмотрены следующие посадки:  ;
;  ;
; ;
;  ;
;  ;
; ![]() .
.
В условных обозначениях резьб с натягом и с переходными посадками поле допуска наружного диаметра d шпильки (болта) не проставляется, поскольку оно постоянное (для резьб с натягом – 6е или 6с, а для резьб с переходными посадками – 6g).
2.8.5. Стандартные резьбы общего и специального назначения
В табл 2.12 приведены наименования стандартных резьб общего назначения, наиболее широко распространенных в машино- и приборостроении, и даны примеры их обозначения на чертежах.
К наиболее распространенным цилиндрическим резьбам специального назначения относятся: метрическая для приборостроения, упорная усиленная 45о, окулярная для оптических приборов, круглая для санитарно-технической арматуры, круглая для цоколей и патронов электрических ламп, для обсадных и колонковых труб геологического бурения, для объективов микроскопов, для масленок консистентной смазки; к коническим резьбам специального назначения относятся: коническая для вентилей и горловин баллонов для газов, замковая для труб геологоразведочного бурения, для обсадных труб и муфт к ним, для насосно-компрессорных труб и муфт к ним.
Таблица 2.12
Резьбы общего назначения
| Тип резьбы | Наименование резьбы | Профиль и угол профиля | Номер стандарта на допуски | Примеры обозначения на чертежах | ||
Для скрепления деталей и регулировочных устройствТреугольный a = 60о |
ГОСТ 9000 - 81 | М0,5 – 4Н5/5h5 | ||||
| с крупным шагом | ГОСТ 16093 – 81 | М20 – 6Н/6g | ||||
| с мелким шагом | М20х2 – 6Н/6g | |||||
| с натягом | ГОСТ 4608 – 81* | М16–2Н5С(2)/3р(2) | ||||
| с переходными посадками | ГОСТ 24834 – 81* | М12-4Н6Н/4j | ||||
| Круглая | Закругленный a = 30о | СТ СЭВ 3962 - 83 | Rd12 – 7H6H/7e6e | |||
Для преобразования движений в винтовых механизмахПилообразный b = 30о; g = 3о |
ГОСТ 25096 - 82 | S80x10 – 7AZ/7h | ||||
| Для плотного (герметичного) соединения труб, арматуры и т. д. | ||||||
|
мовая |
Трубная цилиндрическая |
Треугольный a = 55о |
ГОСТ 6357 - 81 | G2 – A/A | ||
| Трубная коническая | ГОСТ 6211 - 81 |
Rс R |
||||
| Коническая дюймовая |
Треугольный a = 60о |
ГОСТ 6111 – 52* | К3/4" ГОСТ 6111 – 52* | |||
| Коническая метрическая | Коническая метрическая |
Треугольный a = 60о |
ГОСТ 25229 - 82 | МК20х1,5 | ||
|
Примечания: 1. Левая резьба обозначается буквами LH, например, М20 LH – 6Н. 2. Для многозаходной резьбы указывается ход резьбы, а затем в скобках буква Р и численное значение шага, например, Tr20x4(P2) – 8e. |
2.9. Допуски зубчатых и червячных передач
Точность в значительной мере определяет работоспособность зубчатых и червячных передач, так как их погрешности вызывают дополнительные динамические нагрузи, неравномерность вращения, вибрации, шум, концентрацию нагрузок по длине контактных линий и другие дефекты. Существующие системы допусков для зубчатых и червячных передач ограничивают погрешности изготовления с целью получения работоспособных механизмов. Работоспособность передач с учетом условий их работы можно обеспечить, зная, какие основные эксплуатационные показатели определяют точность передач. Эта задача облегчается тем, что по условиям работы все зубчатые и червячные передачи можно подразделить на несколько групп, каждая из которых характеризуется своим основным показателем точности. Так, для отсчетных передач основным точностным требованием является кинематическая точность; для высокоскоростных — плавность работы; для тяжелонагруженных тихоходных — полнота контактных зубьев; для реверсивных (особенно отсчетных) - ограничение величины и колебания бокового зазора.
С учетом условий эксплуатации в стандартах на допуски для зубчатых и червячных передач установлены нормы точности: кинематической, плавности работы и контакта зубьев.
По точности изготовления все зубчатые колеса и передачи разделены на 12 степеней (от 1-й наиболее точной до 12-й наиболее грубой). Для некоторых степеней числовые значения допусков и отклонений пока не предусмотрены. Эти степени точности оставлены для будущего развития. К таким степеням точности относятся: для цилиндрических передач — 1 и 2; для конических – 1 - 3; для червячных - 1 и 2 при m < 1 мм.
Независимо от норм и степеней точности в стандартах предусмотрены необходимые виды сопряжений зубьев, отличающихся наименьшими боковыми зазорами, и виды допусков на боковой зазор.
2.9.1. Система допусков для цилиндрических зубчатых передач [50]
Для эвольвентных цилиндрических зубчатых передач разработан ГОСТ 1643 – 81, который распространяется на эвольвентные цилиндрические зубчатые колеса и зубчатые передачи внешнего и внутреннего зацепления с прямозубыми, косозубыми и шевронными зубчатыми колесами с диаметром делительной окружности до 6300 мм, модулем зубьев от 1 до 55 мм, шириной зубчатого венца или полушеврона до 1250 мм.
2.9.1.1. Кинематическая точность передачи
Для обеспечения кинематической точности предусмотрены нормы, ограничивающие кинематическую погрешность передачи и кинематическую погрешность колеса.
Кинематической погрешностью передачи Fк.п.п. называют разность между действительным j2 и номинальным (расчетным) j2н углами поворота ведомого зубчатого колеса передачи, выраженную в линейных величинах длиной дуги его делительной окружности, т.е. Fк.п.п = (j2 - j2н )×r, где r — радиус делительной окружности ведомого колеса.
Наибольшая кинематическая погрешность F'ior передачи определяется наибольшей алгебраической разностью значений кинематической погрешности передачи за полный цикл изменения относительного положения зубчатых колес (рис. 2.41, а) Здесь и далее штрихом обозначены погрешности, соответствующие однопрофильному зацеплению.
Наибольшая кинематическая погрешность передачи ограничена допуском F'io. Его значения в стандарте не приведены и определяются как сумма допусков на кинематическую погрешность ее колес, т. е.
F'io = F'i1+ F'i2 .
![]()
![]()
![]() Кинематической погрешностью зубчатого колеса
F'к.п.к называют разность между действительным и номинальным (расчетным) углами
поворота зубчатого колеса на его рабочей оси, ведомого точным (измерительным)
колесом при номинальном взаимном положении осей вращения этих колес; ее
выражают в линейных величинах длиной дуги делительной окружности (рис. 2.41,
б).
Кинематической погрешностью зубчатого колеса
F'к.п.к называют разность между действительным и номинальным (расчетным) углами
поворота зубчатого колеса на его рабочей оси, ведомого точным (измерительным)
колесом при номинальном взаимном положении осей вращения этих колес; ее
выражают в линейных величинах длиной дуги делительной окружности (рис. 2.41,
б).
Наибольшая кинематическая погрешность зубчатого колеса F'ir — наибольшая алгебраическая разность значений кинематической погрешности зубчатого колеса в пределах угла jполн полного оборота (см. рис. 2.41, б), Эта погрешность ограничивается допуском на кинематическую погрешность колеса F'i (значения в стандарте не приведены). Он определяется как сумма допусков на накопленную погрешность шага Fр и на погрешность профиля зуба ff: F'i = Fр + ff .
Допускается нормировать кинематическую погрешность колеса на k шагах - F'i kr. Эта погрешность ограничивается допуском F'i k.
Погрешность обката Fcr возникает в результате кинематической погрешности делительной цепи зубообрабатывающего станка. Эту составляющую кинематической погрешности колеса определяют при его вращении на технологической оси, исключив циклические погрешности зубцовой частоты и кратных ей более высоких частот. Погрешность обката ограничивается допуском Fc, выраженным в тех же единицах, что и допуск на кинематическую погрешность колеса.
Накопленная погрешность k шагов Fpkr (рис. 2.42) — наибольшая разность дискретных значений кинематической погрешности зубчатого колеса при номинальном его повороте на k целых угловых шагов:
Fpkr = (j - k×2p/z)×r,
где j — действительный угол поворота зубчатого колеса; z — число зубьев зубчатого колеса; k×2p/z — номинальный угол поворота колеса (k ³ 2 — число целых угловых шагов); r — радиус делительной окружности колеса.
Допуск на накопленную погрешность k шагов обозначают Fpk.
Накопленная погрешность шага зубчатого колеса Fpr — наибольшая алгебраическая разность значений накопленных погрешностей в пределах зубчатого колеса (см. рис. 2.42). Допуск на накопленную погрешность шага зубчатого колеса обозначают Fp. Накопленная погрешность шага зубчатого колеса образуется в основном вследствие погрешности обката и монтажного эксцентриситета зубчатого колеса.
Радиальное биение зубчатого венца Frr — разность действительных предельных положений исходного контура в пределах зубчатого колеса (от его рабочей оси).
Радиальное биение зубчатого венца ограничивается допуском Fr. Практически Frr определяется разностью расстояний от рабочей оси колеса до постоянных хорд Sc зубьев (рис. 2.43, а). Радиальное биение зубчатого венца вызвано неточным совмещением рабочей оси колеса с технологической осью при обработке зубьев, а также радиальным биением делительного колеса станка.
Колебанием длины общей нормали FvWr называют разность между наибольшей и наименьшей действительными длинами общей нормали в одном и том же зубчатом колесе: FvWr = Wнаиб – Wнаим. Оно зависит от тангенциальной составляющей погрешности обката. Эта погрешность ограничена допуском FvW.
Длина общей нормали зубчатого колеса W — расстояние между двумя параллельными плоскостями, касательными к двум разноименным активным боковым поверхностям А и В зубьев колеса (рис. 2.43, б). При этом общая нормаль к эвольвентным профилям является одновременно касательной к основной окружности.
Колебание измерительного межосевого расстояния за оборот колеса F''ir - разность между наибольшим и наименьшим действительными межосевыми расстояниями при двухпрофильном зацеплении измерительного зубчатого колеса с контролируемыми при повороте последнего на полный оборот (рис. 2.44).
Номинальным измерительным межосевым расстоянием а" называют расчетное расстояние между осями измерительного и проверяемого колеса, имеющего наименьшее дополнительное смещение исходного контура. При этом сопряженные зубья колес находятся в плотном двухпрофильном зацеплении.
Здесь и далее двумя штрихами обозначены погрешности, соответствующие двухпрофильному зацеплению. Эти колебания ограничиваются допусками F''i.
2.9.1.2. Плавность работы передачи
Эта характеристика передачи определяется параметрами, погрешности которых многократно (циклически) проявляются за оборот зубчатого колеса и также составляют часть кинематической погрешности. Аналитически или с помощью анализаторов кинематическую погрешность можно представить в виде спектра гармонических составляющих, амплитуда и частота которых зависят от характера составляющих погрешностей. Например, отклонения шага зацепления (основного шага) вызывают колебания кинематической погрешности с зубцовой частотой, равной частоте. входа в зацепление зубьев колес.
Циклический характер погрешностей, нарушающих плавность работы передачи, и возможность гармонического анализа дали основание определять и нормировать эти погрешности по спектру кинематической погрешности.
Под циклической погрешностью передачи fzkor (рис. 2.45, а) и зубчатого колеса fzkr (рис. 2.45, б) понимают удвоенную амплитуду гармонической составляющей кинематической погрешности соответственно передачи или колеса. Для ограничения циклической погрешности установлены допуски:
fzоk — на циклическую погрешность передачи и fzk — на циклическую погрешность зубчатого колеса.
Для ограничения циклической погрешности с частотой повторения, равной частоте входа зубьев в зацепление fzzor и fzzr , установлены допуски на циклическую погрешность зубцовой частоты в передаче fzzo и fzz. Эти допуски зависят от частоты циклической погрешности (равной числу зубьев колес z), степени точности, коэффициента осевого перекрытия eb и модуля m.
Коэффициентом осевого перекрытия косозубой цилиндрической передачи eb называют отношение угла осевого перекрытия зубчатого колеса к угловому шагу. Угол осевого перекрытия jb (рис. 2.46) — это угол поворота зубчатого колеса косозубой цилиндрической передачи, при котором точка контакта зубьев перемещается по линии зуба этого колеса от одного его торца до другого (т. е. угол поворота колеса передачи от положения входа до выхода зуба из зацепления).
Косозубые передачи со значительным коэффициентом осевого перекрытия eb по сравнению с прямозубыми имеют меньший зубцовый импульс (меньшую амплитуду первой гармонической составляющей), поэтому с увеличением eb допуск fzzo уменьшается.
Местные кинематические погрешности передачи f 'ior и зубчатого колеса f 'ir определяются наибольшей разностью между местными соседними экстремальными (минимальными и максимальными) значениями кинематической погрешности передачи или зубчатого колеса за полный цикл вращения колес передачи или в пределах оборота колеса jполн (рис. 2.47). Эти погрешности ограничиваются допусками соответственно f 'io f 'i, причем f 'i = êfPtê + ff.
Погрешность профиля зуба ffr (рис. 2.48) — расстояние по нормали между двумя ближайшими номинальными торцовыми профилями 1, между которыми размещается действительный торцовый активный профиль 2 зуба колеса. Под действительным торцовым профилем зуба понимают линию пересечения действительной боковой поверхности зуба зубчатого колеса плоскостью, перпендикулярной к его рабочей оси.
Погрешности профиля вызывают неравномерность движения колес, дополнительные динамические нагрузки, а также уменьшают поверхность контакта зубьев. Предельная погрешность профиля регламентируется допуском ff.
Действительный профиль рабочего участка зуба может иметь срез у вершины головки, называемый фланком. Применение колес с фланкированными зубьями значительно улучшает плавность работы передачи, обеспечивая более плавный вход зубьев в зацепление и выход из него. Если плавность работы колес соответствует требованиям стандарта, контроль плавности передач не обязателен, и, наоборот, если плавность передачи соответствует нормативам, плавность колес определять не обязательно. Отклонение шага (углового) в колесе fPtr – это кинематическая погрешность зубчатого колеса при его повороте на один номинальный угловой шаг.
Отклонение шага зацепления fPbr — разность между действительным Рд и номинальным Pн шагами зацепления (рис. 2.49).
Установлены верхнее и нижнее предельные отклонения шага ±fPt и шага зацепления (основного) ±fPb. Вместо отклонения шага fPtr можно применять разность любых шагов fvPtr , причем допуск на разность любых шагов fvPtr= 1,6×êfPt ê.
Колебание измерительного межосевого расстояния на одном зубе f''ir - разность между наибольшим и наименьшим действительными межосевыми расстояниями при двухпрофильном зацеплении измерительного зубчатого колеса с контролируемыми при повороте последнего на один угловой шаг (см. рис. 2.44). Эти колебания ограничиваются допусками f''i.
Измерительное межосевое расстояние на одном зубе может изменяться вследствие колебаний положения зуборезного инструмента относительно оси колеса, неравенства шагов зацепления (основных шагов) сопрягаемых колес, погрешностей в направлении зубьев колес и т. п.
2.9.1.3. Контакт зубьев в передаче
Для повышения износостойкости и долговечности зубчатых передач необходимо, чтобы полнота контакта сопряженных боковых поверхностей зубьев колес была наибольшей. При неполном и неравномерном прилегании зубьев уменьшается несущая площадь поверхности их контакта, неравномерно распределяются контактные напряжения и смазочный материал, что приводит к интенсивному изнашиванию зубьев. Для обеспечения необходимой полноты контакта зубьев в передаче установлены наименьшие размеры суммарного пятна контакта.
Суммарным пятном контакта называют часть активной боковой поверхности зуба колеса, на которой располагаются следы прилегания зубьев парного колеса (следы надиров или краски) в собранной передаче после вращения под нагрузкой, устанавливаемой конструктором. Пятно контакта (рис. 2.50) определяется: по длине зуба – отношением расстояния а между крайними точками следов прилегания за вычетом разрывов с, превышающих модуль (в мм), к длине зуба b, т. е. [(а – с)/b]×100 %; по высоте зуба — отношением средней (по длине зуба) высоты следов прилегания hm к высоте зуба соответствующей активной боковой поверхности hp, т. е. (hm/hp)×100 %.
Мгновенное пятно контакта, определяемое после поворота колеса собранной передачи на полный оборот при легком торможении.
На полноту контакта колес влияют погрешности формы зубьев и погрешности их взаимного расположения в передаче.
Отклонением осевых шагов по нормали FPxnr называют разность между действительным осевым расстоянием зубьев и суммой соответствующего числа номинальных осевых шагов, умноженную на синус угла наклона делительной линии зуба b р, т. е. FPxnr = FPxr×sinb (рис. 2.51, a).
Под действительным осевым расстоянием зубьев понимают расстояние между одноименными линиями зубьев косозубого зубчатого колеса по прямой, параллельной рабочей оси. Расстояние между одноименными линиями соседних зубьев является действительным осевым шагом. По Госту 1643 – 81 предусмотрены предельные отклонения осевых шагов по нормали ± FPxn.
Суммарная погрешность контактной линии Fkr— расстояние по нормали между двумя ближайшими номинальными потенциальными контактными линиями 1, условно наложенными на плоскость (поверхность) зацепления, между которыми размещается действительная потенциальная контактная линия 2 на активной боковой поверхности зуба (рис. 2.51, б). Под контактной линией понимают линию пересечения поверхности зуба поверхностью зацепления.
Допуск на суммарную погрешность контактной линии Fk для данного модуля зависит от ширины колеса (или длины контактной линии) и коэффициента eb (с их увеличением допуск увеличивается). Отклонение FPxnr влияет на продольный, а погрешность Fkr — на высотный контакт зубьев.
Погрешность направления зуба Fbr — расстояние по нормали между двумя ближайшими номинальными делительными линиями зуба 1 в торцовом сечении (рис. 2.51, в), между которыми проходит действительная делительная линия зуба 2, соответствующая рабочей ширине венца или полушеврона. Под действительной делительной линией зуба понимают линию пересечения действительной боковой поверхности зуба колеса делительным цилиндром, ось которого совпадает с рабочей осью. Допуск на направление зуба Fb увеличивается с увеличением ширины колеса (или длины контактной линии).
Отклонением от параллельности осей fxr называют отклонение от параллельности проекций рабочих осей зубчатых колес в передаче на плоскость, в которой лежит одна из осей и точка второй оси в средней плоскости передачи (рис. 2.51, г). Средней плоскостью передачи считают плоскость, проходящую через середину рабочей ширины зубчатого венца или (для шевронной передачи) через середину расстояния между внешними торцами, ограничивающими рабочую ширину полушевронов.
Перекос осей fyr — отклонение от параллельности проекции рабочих осей зубчатых колес в передаче на плоскость, параллельную одной из осей и перпендикулярную плоскости, в которой лежит эта ось, и точка пересечения второй оси со средней плоскостью передачи (рис. 2.51, г).
Отклонение от параллельности и перекос осей определяют в торцовой плоскости в линейных единицах на длине, равной рабочей ширине венца или ширине полушеврона. Эти погрешности, характеризующие точность монтажа передачи с нерегулируемым расположением осей, ограничивают допусками fx и fy.
Отклонениями межосевого расстояния far определяется точность монтажа передачи (рис. 2.51, г). Для этой погрешности установлены предельные отклонения ±fa.
При соответствии суммарного или мгновенного пятна контакта требованиям стандарта контроль по другим показателям, определяющим контакт зубьев в передаче, не является необходимым. Допускается определять пятна контакта с помощью измерительного колеса.
2.9.1.4. Боковой зазор
Для устранения возможного заклинивания при нагреве передачи, обеспечения условий протекания смазочного материала и ограничения мертвого хода при реверсировании отсчетных и делительных реальных передач они должны иметь боковой зазор jn (между нерабочими профилями зубьев сопряженных колес). Этот зазор необходим также для компенсации погрешностей изготовления и монтажа передачи и для устранения удара по нерабочим профилям, который может быть вызван разрывом контакта рабочих профилей вследствие динамических явлений. Такая передача является однопрофильной (контакт зубьев колес происходит по одним рабочим профилям).
Боковой зазор определяют в сечении, перпендикулярном к направлению зубьев, в плоскости, касательной к основным цилиндрам (рис. 2.52).
Независимо от степени точности изготовления колес передачи предусмотрено шесть видов сопряжении. Установлено шесть классов отклонений межосевого расстояния, обозначаемых в порядке убывания точности римскими цифрами от I до VI. Соответствие видов сопряжении и указанных классов, приведенных в табл. 2.13, допускается изменять.
На боковой зазор установлен допуск Тjn, определяемый разностью между наибольшим и наименьшим зазорами. По мере увеличения бокового зазора увеличивается допуск Тjn. Установлено восемь видов допуска на боковой зазор: х, у, z, а, b, с, d, h. Каждому виду сопряжения соответствует определенный вид допуска (см. табл. 2.13). Соответствие видов сопряжений и видов допусков допускается изменять, используя при этом и виды допуска x, у и z.
Боковой зазор jn min, необходимый для компенсации температурных деформаций и размещения смазочного материала, определяют по формуле
jn min = V + aw ×(a1×Dto1 - a2×Dto2)×2sina ,
где V —толщина слоя смазочного материала между зубьями; aw — межосевое расстояние; a1 и a2 — температурные коэффициенты линейного расширения материала колес и корпуса; ×Dto1 и ×Dto2 — отклонение температур колеса и корпуса от 20 °С; a — угол профиля исходного контура.
Деформацию от нагрева определяют по нормали к профилям.
Боковой зазор обеспечивают путем радиального смещения исходного контура рейки (зуборезного инструмента) от его номинального положения в тело колеса (рис. 2.54). Под номинальным положением исходного контура понимают положение исходного контура на зубчатом колесе, лишенном погрешностей, при котором номинальная толщина зуба соответствует плотному двухпрофильному зацеплению.
Таблица 2.13
Виды сопряжений и соответствующие им виды допусков на боковой зазор и классы отклонений на межосевое расстояние
| Виды сопряжений с зазором | Обозначение вида сопряжений | Для степеней точности по нормам плавности | Виды допусков на боковой зазор | Классы отклонений на межосевое расстояние |
| I | ||||
| нулевым | H | 3 – 7 | h | II |
| весьма малым | E | 3 – 7 | h | II |
| малым | D | 3 – 8 | d | III |
| уменьшенным | C | 3 – 9 | c | IV |
| нормальным | B | 3 – 11 | b | V |
| увеличенным | A | 3 - 12 | a | VI |
| z, y, x |
Связь смещения исходного контура с боковым зазором jn и утолщением толщины зуба по постоянной хорде Ecs можно установить соответственно из треугольников abc и dbc (см. рис. 2.54):
jn min = 2EHs×sina;
Ecs = 2EHs×tga.
Дополнительное смещение исходного контура ЕHr от его номинального положения в тело зубчатого колеса осуществляют для обеспечения в передаче гарантированного бокового зазора. Наименьшее дополнительное смещение исходного контура назначают в зависимости от степени точности по нормам плавности и вида сопряжения и обозначают: для зубчатых колес с внешними зубьями как - EHs, для колес с внутренними зубьями - через +EHi.
В табл. 2.14 приведены показатели, определяющие гарантированный боковой зазор, допуски и отклонения по нормам бокового зазора.
Таблица 2.14
Показатели бокового зазора
| Контролируемый объект | Показатель | Допуск или отклонение | ||
| Наименование | Обозначе-ние | Наименование | Обозначе-ние | |
| Передача с нерегули-ремым расположени-ем осей | Отклонение меж-осевого расстояния | far | Предельные откло-нения межосевого расстояния | ±fa |
| Передача с регули-руемым положением осей | Наименьший боковой зазор | jn min | Допуск бокового зазора | Tjn |
| Зубчатые колеса | Наименьшее допол-нительное смещение исходного контура | EHs | Допуск на смещение исходного контура | TH |
| Наименьшее откло-нение средней дли-ны общей нормали | EWms | Допуск на среднюю длину общей нормали | Twm | |
| Наименьшее откло-нение длины общей нормали | EWs | Допуск на длину общей нормали | Tw | |
| Наименьшее откло-нение толщины зуба | Ecs | Допуск на толщину зуба | Tc | |
| Верхнее отклонение измерительного межосевого расстояния | Ea''s | Нижнее отклонение измерительного межосевого расстояния | Ea''i |
Примечание. Среднюю длину общей нормали определяют по формуле
Wm = (W1 + W2 + × × × + Wz)/z ,
где W1, W2, × × × Wz – действительные длины общей нормали; z – число зубьев.
Общий боковой зазор должен состоять из гарантированного бокового зазора jn min и зазора Кj, компенсирующего погрешности изготовления зубчатых колес и монтажа передачи и уменьшающего боковой зазор:
jn min + Кj = 2(EHs1 + EHs2)×sina.
Зазор Кj отсчитывают по нормали к зубьям.
Необходимое наименьшее смещение исходного контура на обоих зубчатых колесах
EHs1 + EHs2 = 0,5×( jn min + Кj)/ sina.
Зазор Кj предназначен для компенсации ряда погрешностей изготовления зубчатых колес и монтажа передачи и определяется по формуле
![]() .
.
Наибольший боковой зазор, получаемый между зубьями в передаче, не ограничен стандартом. Он представляет собой замыкающее звено сборочной размерной цепи, в которой составляющими размерами, ограниченными допусками, являются межосевое расстояние и смещение исходных контуров при нарезании обоих колес и др. Поэтому наибольший зазор не может превышать значения, получаемого при наиболее неблагоприятном сочетании отклонений составляющих размеров:
jn max = jn min + 2(TH1 + TH2 + 2fa)×sina.
2.9.1.5. Обозначение точности колес и передач
Точность изготовления зубчатых колес и передач задают степенью точности, а требования к боковому зазору — видом сопряжения по нормам бокового зазора. Примеры условного обозначения: 7 - С ГОСТ 1643 - 81 — цилиндрическая передача со степенью точности 7 по всем трем нормам, с видом сопряжения зубчатых колес С и соответствием между видом сопряжения и видом допуска на боковой зазор (вид допуска с), а также между видом сопряжения и классом отклонений межосевого расстояния; 8 – 7 – 6 - Ва ГОСТ 1643 - 81 — цилиндрическая передача со степенью 8 по нормам кинематической точности, со степенью 7 - по нормам плавности, со степенью 6 - по нормам контакта зубьев с видом сопряжения В, видом допуска на боковой зазор а и соответствием между видом сопряжения и классом отклонений межосевого расстояния.
Пример обозначения передачи со степенью точности 7 по всем нормам, с видом сопряжения колес С, видом допуска на боковой зазор а и более грубым классом отклонений межосевого расстояния — V (при аw = 450 мм и уменьшенном гарантированном боковом зазоре jn min = 128 мкм): 7 - Са/V - 128 ГОСТ 1643 - 81. Здесь уменьшенный гарантированный зазор определен по формуле
j'n min = jn min – 0,68(çf 'aç- çfaç) = 155 – 0,68 (120 – 80) » 128 ,
где f 'a - отклонение межосевого расстояния для более грубого класса; jn min и fa - гарантированный боковой зазор и предельное отклонение межосевого расстояния для данного вида сопряжения найдены по ГОСТу 1643 - 81.
При более точном классе отклонений аw боковой зазор в передаче больше табличного и его в обозначении можно не указывать.
В тех случаях, когда на одну из норм цилиндрических зубчатых передач не задается степень точности, вместо соответствующей цифры указывается буква N. Например, N – 8 – 8 – D ГОСТ 9178 – 81.
2.9.1.6. Выбор степени точности и контролируемых параметров зубчатых передач
Степень точности колес и передач устанавливают в зависимости от требований к кинематической точности, плавности, передаваемой мощности, а также окружной скорости колес. При выборе степени точности учитывают опыт эксплуатации аналогичных передач. При комбинировании степеней точности необходимо учитывать, что нормы плавности работы колес и передач могут быть не более чем на две степени точнее или на одну степень грубее норм кинематической точности; нормы контакта зубьев можно назначать по любым степеням, более точным, чем нормы плавности, а также на одну ступень грубее норм плавности.
Указанные ограничения вызваны наличием определенной взаимосвязи между показателями точности колес. Так, циклическая погрешность является частью кинематической погрешности, многократно повторяющейся за оборот колеса (см. рис. 2.45). Поэтому при сохранении допуска на кинематическую погрешность колеса расширение допуска на циклическую погрешность более чем на одну степень вызывает заметное уменьшение допускаемого значения кинематической погрешности и делает практически невозможным изготовление такого колеса.
Передача не может работать плавно при плохом контакте зубьев. Если контакт смещен к головке или ножке зуба, то зуб работает кромкой на входе или выходе из зацепления, что вызывает неспокойную работу передачи. В большинстве случаев степени точности по нормам контакта совпадают со степенями точности по нормам плавности.
Точность зубчатых колес проверяют различными методами и с помощью различных средств, поэтому установлено несколько равноправных вариантов показателей точности колес. Выбор контролируемых параметров (показателей точности) зубчатых колес зависит от требуемой точности, размера, особенностей производства и других факторов.
Предпочтение следует отдавать комплексным показателям F'ior, fzzor, fzkor и суммарному пятну контакта. При комплексном контроле точность колес и передач оценивают по суммарному проявлению отклонений отдельных параметров, часть из которых может быть увеличена за счет уменьшения других или же вследствие компенсации одних погрешностей другими.
Для контроля кинематической точности, плавности, полноты контакта и бокового зазора колес установлены комплексы контролируемых параметров, приведенные в ГОСТе 1643 – 81.
Показатели кинематической точности, плавности работы и контакта зубьев колес установлены так, что результаты контроля зубчатого колеса по одному из указанных комплексов не противоречат результатам проверки по другому комплексу. Например, если колесо по нормам кинематической точности признано годным по третьему комплексу, то оно не должно быть забраковано при повторном контроле по первому или любому другому комплексу. Для этого допуски различных показателей точности между собой взаимосвязаны.
2.9.2. Допуски зубчатых конических и гипоидных передач
Принципы построения системы допусков для зубчатых конических (ГОСТ 1758 - 81) и гипоидных передач (ГОСТ 9368 – 81) аналогичны принципам построения системы для цилиндрических передач. Установлено 12 степеней точности зубчатых колее и передач, причем для степеней точности 1, 2 и 3 допуски и предельные отклонения не даны (они предусмотрены для будущего развития). Для каждой степени точности установлены нормы: кинематической точности, плавности работы и контакта зубьев колес в передаче. Допускается комбинирование указанных норм различных степеней точности. При этом нормы плавности могут быть не более чем на две степени точнее или на одну степень грубее норм кинематической точности; нормы контакта зубьев нельзя назначать по степеням точности более грубыми, чем нормы плавности.
Независимо от степеней точности и их комбинирования установлено шесть видов сопряжении зубчатых колес в передаче: А, В, С, D, Е и Н (в порядке убывания гарантированного бокового зазора).
На кинематическую точность колес, скомплектованных пар колес и передач кроме параметров, предусмотренных для цилиндрических передач, предусмотрены также следующие специфические параметры:
колебание измерительного межосевого угла пары (измерительной пары) за полный цикл F''iSor (за полный оборот зубчатого колеса F''iSr ), определяемое разностью наибольшего и наименьшего измерительных межосевых углов за полный цикл (оборот колеса) изменения относительного положения зубчатых колее пары при беззазорном их зацеплении;
колебание бокового зазора в передаче Fvjr;
колебание относительного положения зубчатых колеc пары (измерительной пары) по нормали за полный цикл F''inor (за полный оборот зубчатого колеса F''inr ), определяемое наибольшей разностью положений одного колеса пары относительно другого в направлении, перпендикулярном плоскости, проходящей через общую образующую начальных конусов и касательную к ним (применяются вместо F''iSor и F''iSr соответственно).
Показатели плавности работы и контакта зубьев примерно те же, что и для цилиндрических передач.
Для оценки плавности работы предусмотрен специфический параметр - осевое смещение зубчатого венца fAMr, определяемое смещением зубчатого венца вдоль его оси при монтаже передачи от положения, при котором плавность работы и пятно контакта являются наилучшими, установленными при обкаточном контроле пары 1—2 (рис. 2.55). Установлены предельные осевые смещения зубчатого венца ± fAM.
Примеры условного обозначения точности конической передачи:
8 – 7 – 6 - В ГОСТ 1758 – 81.
2.9.3. Допуски червячных цилиндрических передач
Для червячных цилиндрических передач ГОСТ 3675 – 81 устанавливает 12 степеней точности: 1, 2, . . ., 12 (в порядке убывания точности).
Для червяков, червячных колес и червячных передач каждой степени точности установлены нормы: кинематической точности, плавности работы и контакта зубьев и витков. Допускается комбинирование указанных норм разных степеней точности при соблюдении правил, аналогичных правилам, установленным для цилиндрических зубчатых передач.
Независимо от степеней точности установлено шесть видов сопряжении червяка с червячным колесом в передаче: А, В, С, D, Е, Н — и восемь видов допуска Тjn,: х, у, z, а, b, с, d, h. Обозначения даны в порядке убывания бокового зазора и допуска на него.
Показатели кинематической точности червячных колес и передач такие же, что и у цилиндрических зубчатых передач.
Показателями плавности работы червяков являются:
погрешность винтовой поверхности витка червяка fhsr;
радиальное биение витка червяка frr;
отклонение осевого шага червяка fPxr;
накопленная погрешность k шагов червяка fPxkr;
погрешность винтовой линии в пределах оборота fhr и на всей длине червяка fhkr;
погрешность профиля витка червяка fflr.
Показателями плавности работы червячных колес и передачи являются такие же показатели, что у цилиндрических зубчатых передач.
Показателями контакта зубьев червячного колеса с витками червяка являются:
суммарное пятно контакта;
смещение средней плоскости в передаче fxr (рис.2.56, а);
отклонение межосевого расстояния в передаче far (рис. 2.56, б);
отклонение межосевого угла передачи fSr (рис. 2.56, в).
2.10. Взаимозаменяемость шлицевых соединений
Шлицевое соединение можно рассматривать как "многошпоночное" соединение, в котором шпонки выполнены заодно с валом или втулкой и расположены по всей окружности равномерно и параллельно их осям. В зависимости от профиля зубьев шлицевые соединения делятся на шлицевые прямобочные (ГОСТ 1139 – 80*), шлицевые эвольвентные с углом профиля 30° (ГОСТ 6033 – 80*) и треугольные.
Наибольшее распространение получили соединения шлицевые с прямобочным профилем зубьев, расположенных параллельно оси соединения. ГОСТ 1139 – 80* устанавливает число зубьев, номинальные размеры соединений легкой, средней и тяжелой серий, а также допуски для соединений с центрированием по внутреннему и наружному диаметрам и по боковым сторонам зубьев.
Шлицевые соединения называют подвижными, когда детали, насаживаемые на вал, имеют возможность осевого перемещения (например, зубчатые колеса коробок передач, муфты сцепления и другие узлы), и неподвижными, если втулка не может перемещаться относительно вала.
Шлицевые соединения с эвольвентным профилем зубьев, расположенных параллельно оси соединения, с углом профиля 30°, регламентируются ГОСТом 6033 – 80*. Стандарт устанавливает исходный контур, форму зубьев, номинальные диаметры, модули и числа зубьев, номинальные размеры и измеряемые величины при центрировании по боковым поверхностям зубьев, а также допуски и посадки.
Шлицевые соединения с эвольвентным профилем зубьев по сравнению с прямобочными обладают существенными преимуществами: они имеют большую нагрузочную способность и циклическую прочность, обеспечивают лучшее центрирование и направление деталей, проще в изготовлении, так как их можно фрезеровать методом обкатки и т.п.
Выбор типа шлицевых соединений связан с их конструированием и технологическими особенностями.
2.10.1. Допуски и посадки соединений с прямобочным профилем зубьев
По ГОСТу 1139 – 80* установлены допуски для соединений с центрированием по внутреннему d и наружному D диаметрам, а также по боковым сторонам зубьев b. Поскольку вид центрирования непосредственно
связан с выбором полей допусков на отдельные элементы соединения и их посадки, то назначение допусков определяется характером центрирования.
Выбирая вид центрирования шлицевых соединений, учитывают характер и условия работы узла, номинальные размеры соединений легкой, средней и тяжелой серий и исполнение (А, В, С) шлицевых валов (рис. 2.57).
При изготовлении шлицевых валов с применением различных видов центрирования рекомендуется учитывать следующее: в соединениях легкой и средней серий размер d дан для валов исполнения А при изготовлении методом обкатки; валы соединений тяжелой серии исполнения А, как правило, методом обкатки не изготовляются; при центрировании по внутреннему диаметру шлицевые валы изготовляются в исполнениях А и С; при центрировании по наружному диаметру и боковым сторонам зубьев шлицевые валы изготовляются в исполнении В.
Центрирование по внутреннему диаметру d целесообразно, когда втулка имеет высокую твердость и ее нельзя обработать чистовой протяжкой (отверстие шлифуют на обычном внутришлифовальном станке) или когда могут возникнуть значительные искривления длинных валов после термической обработки. Способ обеспечивает точное центрирование и применяется обычно для подвижных соединений. Точные посадки выполняются по размерам d и b.
Центрирование по наружному диаметру D рекомендуется, когда втулку термически не обрабатывают или когда твердость ее материала после термической обработки допускает калибровку протяжкой, а вал — фрезерование до получения окончательных размеров зубьев. Такой способ прост и экономичен. Его применяют для неподвижных соединений, а также для подвижных, воспринимающих небольшие нагрузки. Точные посадки выполняются по размерам D и b.
Центрирование по боковым сторонам зубьев b целесообразно при передаче знакопеременных нагрузок, больших крутящих моментов и при реверсивном движении. Этот метод способствует более равномерному распределению нагрузки между зубьями, но не обеспечивает высокой точности центрирования, поэтому редко применяется. Точные посадки выполняются по размеру b.
Для нецентрирующих диаметров рекомендуемые поля допусков приведены в ГОСТе 1139 – 80*.
Допуски и основные отклонения размеров d, D и b шлицевого соединения назначают по ГОСТу 25346 – 89.
Пример условного обозначения шлицевого соединения с числом зубьев z = 8, внутренним диаметром d = 36 мм, наружным диаметром D = 40 мм, шириной зуба b = 7 мм, с центрированием по внутреннему диаметру d, с посадкой по диаметру d - H8/e8 и по размеру b – D9/f8:
d – 8 ´ 36H8/e8 ´ 40H12/a11 ´ 7D9/f8;
то же, при центрировании по наружному диаметру с посадкой по наружному диаметру D – H7/h7 и по размеру b – D9/f8:
D – 8 ´ 36 ´ 40H7/h7 ´ 7D9/f8;
то же, при центрировании по боковым сторонам зубьев:
b – 8 ´ 36 ´ 40H12/a11 ´ 7D9/f8.
Пример условного обозначения втулки того же соединения при ценрировании по внутреннему диаметру: d - 8 ´ 36Н8 ´ 40Н12 ´ 7D9; вала того же соединения d – 8 ´ 36е8 ´ 40а11 ´ 7f8.
2.10.2. Допуски и посадки шлицевых соединений с эвольвентным профилем зубьев
Номинальные размеры шлицевых соединений с эвольвентным профилем (рис. 2.58), номинальные размеры по роликам (рис. 2.59) и длины общей нормали для отдельных измерений шлицевых валов и втулок должны соответствовать ГОСТу 6033 – 80*.
Допуски и посадки шлицевых соединений установлены ГОСТом 6033 – 80* по трем видам центрирования: по боковым поверхностям зубьев, наружному диаметру и по внутреннему диаметру.
Для шлицевых эвольвентных соединений создана принципиально новая система в рамках международных норм взаимозаменяемости.
Для нормирования точности изготовления ширины впадины втулки и толщины зуба вала установлены два вида допусков: собственно ширины впадины втулки и толщины зуба вала, обозначаемые соответственно Те и Тs, и суммарный допуск Т, включающий отклонение собственно ширины впадины (толщины зуба) и отклонение формы и расположения элементов профиля впадины (зуба). Расположение полей допусков собственно ширины впадины (толщины зуба) и поле допуска для отклонения формы и расположения элементов профиля и посадки приведены на рис. 2.60. Числовые значения номинальных размеров по роликам, длин общей нормали и допусков на эти параметры, а также допусков Те, Тs и Т даны в ГОСТе 6033 – 80*.
Допуски на наружный и внутренний диаметры (центрирующие и нецентрирующие) выполняются по ГОСТу 25347 – 82*.
Поля допусков нецентрирующих диаметров должны соответствовать указанным в ГОСТе 6033 – 80*.
Условные обозначения шлицевых эвольвентных соединений, валов и втулок содержат: номинальный диаметр соединения D, модуль m, обозначение посадки соединения (полей допусков втулки и вала), помещаемое после размеров центрирующих элементов, номер стандарта.
Примеры обозначений эвольвентных соединений:
1) D = 50 мм, m = 2 мм с центрированием по боковым сторонам зубьев, с посадкой по боковым поверхностям зубьев 9H/9g: соединения 50 ´ 2 ´ 9Н/9g ГОСТ 6033 – 80*; втулки 50 ´ 2 ´ 9Н ГОСТ 6033 – 80*; вала 50 ´ 2 ´ 9g ГОСТ 6033 – 80*.
2) D = 50 мм, m = 2 мм с центрированием по наружному диаметру, с посадками по диаметру центрирования H7/g6 и по нецентрирующим боковым поверхностям зубьев 9H/9g: соединения 50 ´ 7H/6g ´ 2 ´ 9H/9g ГОСТ 6033 – 80*; втулки 50 ´ 7Н ´ 2 ´ 9H ГОСТ 6033 – 80*; вала 50 ´ 6g ´ 2 ´ 9g ГОСТ 6033 – 80*.
3) D = 50 мм, m = 2 мм с центрированием по внутреннему диаметру ( i ), с посадками по диаметру центрирования H7/g6 и по нецентрирующим боковым поверхностям зубьев 9H/9h: соединения i 50 ´ 2 ´ 7H/6g ´ 9H/9h ГОСТ 6033 – 80*; втулки i 50 ´ 2 ´ 7Н ´ 9H ГОСТ 6033 – 80*; вала i 50 ´ 2 ´ 6g ´ 9h ГОСТ 6033 – 80*.
2.10.3. Контроль точности шлицевых соединений [50]
Шлицевые соединения контролируют комплексными проходными
Контроль шлицевого вала или втулки комплексным калибром достаточен в одном положении, без перестановки калибра. Контроль поэлементным непроходным калибром необходим не менее чем в трех различных положениях. Если поэлементный непроходной калибр проходит в одном из этих положений, контролируемую деталь считают бракованной.
Допуски калибров для контроля шлицевых прямобочных соединений регламентированы ГОСТом 7951 – 80*, допуски и виды калибров для контроля шлицевых эвольвентных соединений — ГОСТом 24969 – 81*.
2.11. Расчет допусков размеров, входящих в размерные цепи
2.11.1. Основные термины и определения, классификация размерных цепей
При конструировании механизмов, машин, приборов и других изделий, проектировании технологических процессов, выборе средств и методов измерений возникает необходимость в проведении размерного анализа, с помощью которого достигается правильное соотношение взаимосвязанных размеров и определяются допустимые ошибки (допуски). Подобные геометрические расчеты выполняются с использованием теории размерных цепей.
Размерной цепью называется совокупность взаимосвязанных размеров, образующих замкнутый контур и определяющих взаимное положение поверхностей (или осей) одной или нескольких деталей.
Звеном называется каждый из размеров, образующих размерную цепь. Звеньями размерной цепи могут быть любые линейные или угловые параметры: диаметральные размеры, расстояния между поверхностями или осями, зазоры, натяги, перекрытия, мертвые ходы, отклонения формы и расположения поверхностей (осей) и т. д.
Любая размерная цепь имеет одно исходное (замыкающее) звено и два или более составляющих звеньев.
Исходным называется звено, к которому предъявляется основное требование точности, определяющее качество изделия в соответствии с техническими условиями. Понятие исходного звена используется при проектном расчете размерной цепи. В процессе обработки или при сборке изделия исходное звено получается обычно последним, замыкая размерную цепь. В этом случае такое звено именуется замыкающим. Понятие замыкающего звена используется при поверочном расчете размерной цепи. Таким образом, замыкающее звено непосредственно не выполняется, а представляет собой результат выполнения (изготовления) всех остальных звеньев цепи.
Составляющими называются все остальные звенья, с изменением которых изменяется и замыкающее звено.
На рис. 2.62 приведены примеры эскизов детали (а) и сборочного узла (б), а также размерные цепи для них (в виде размерных схем) - детальная (в) и сборочная (г), с помощью которых решаются задачи достижения заданной точности замыкающего звена АD.
Составляющие звенья размерной цепи разделяются на две группы. К первой группе относятся звенья, с увеличением которых (при прочих постоянных) увеличивается и замыкающее звено. Такие звенья называются увеличивающими (на рис. 2.62, а звено А2).
Ко второй группе относятся звенья, с увеличением которых уменьшается замыкающее звено. Такие звенья называются уменьшающими (на рис 2.62, а звено А1и А3).
В более сложных размерных цепях можно выявить увеличивающие и уменьшающие звенья, применив правило обхода по контуру. На схеме размерной цепи исходному звену предписывается определенное направление, обозначаемое стрелкой над буквенным обозначением.
Все составляющие звенья также обозначаются стрелками, начиная от звена, соседнего с исходным, и должны иметь один и тот же замкнутый поток направлений (см. рис. 2.62, а). Тогда все составляющие звенья, имеющие то же направление стрелок, что и у исходного звена, будут уменьшающими, а остальные звенья цепи — увеличивающими.
Размерные цепи классифицируются по ряду признаков (табл. 2.15). Расчет и анализ размерных цепей позволяет: установить количественную связь между размерами деталей машины и уточнить номинальные значения и допуски взаимосвязанных размеров исходя из эксплуатационных требований и экономической точности обработки деталей и сборки машины; определить наиболее рентабельный вид взаимозаменяемости (полная или неполная); добиться наиболее правильной простановки размеров на рабочих чертежах; определить операционные допуски и пересчитать конструктивные размеры на технологические (в случае несовпадения технологических баз с конструктивными).
Таблица 2.15
Классификация размерных цепей [10]
| Классификационный признак | Название размерной цепи | Назначение, характеристика |
| Область применения | Конструкторская | Решается задача обеспечения точности при конструировании изделий |
| Технологическая | Решается задача обеспечения точности при изготовлении изделий | |
| Измерительная | Решается задача измерения величин, характеризующих точность изделий | |
| Место в изделии | Детальная | Определяет точность относительного положения поверхностей или осей одной детали |
| Сборочная | Определяет точность относительного положения поверхностей или осей деталей, входящих в сборочную единицу | |
| Расположение звеньев | Линейная | Звенья цепи являются линейными размерами. Звенья расположены на параллельных прямых |
| Угловая | Звенья цепи представляют собой угловые размеры, отклонения которых могут быть заданы в линейных величинах, отнесенных к условной длине, или в градусах | |
| Плоская | Звенья цепи расположены произвольно в одной или нескольких параллельных плоскостях | |
| Пространственная | Звенья цепи расположены произвольно в пространстве | |
| Характер звеньев | Скалярная | Все звенья цепи являются скалярными величинами |
| Векторная | Все звенья цепи являются векторными погрешностями | |
| Комбинированная | Часть составляющих звеньев размерной цепи — векторные погрешности, остальные — скалярные величины | |
| Характер взаимных связей | Параллельно связанные | Размерные цепи (две или более), имеющие хотя бы одно общее звено |
| Независимые | Размерные цепи, не имеющие общих звеньев |
Расчет размерных цепей и их анализ — обязательный этап конструирования машин, способствующий повышению качества, обеспечению взаимозаменяемости и снижению трудоемкости их изготовления. Сущность расчета размерной цепи заключается в установлении допусков и предельных отклонений всех ее звеньев исходя из требований конструкции и технологии. При этом различают две задачи:
Прямая задача. По заданным номинальному размеру и допуску (отклонениям) исходного звена определить номинальные размеры, допуски и предельные отклонения всех составляющих звеньев размерной цепи. Такая задача относится к проектному расчету размерной цепи.
Обратная задача. По установленным номинальным размерам, допускам и предельным отклонениям составляющих звеньев определить номинальный размер, допуск и предельные отклонения замыкающего звена. Такая задача относится к поверочному расчету размерной цепи.
Решением обратной задачи проверяется правильность решения прямой задачи.
Существуют методы расчета размерных цепей, которые при внедрении результатов расчета обеспечивают полную и неполную (ограниченную) взаимозаменяемость. Кроме того, применяют теоретико-вероятностный метод расчета размерных цепей.
2.11.2. Метод расчета размерных цепей, обеспечивающий полную взаимозаменяемость
Чтобы обеспечить полную взаимозаменяемость, размерные цепи рассчитывают методом максимума-минимума, при котором допуск замыкающего размера определяют арифметическим сложением допусков составляющих размеров. Метод расчета на максимум-минимум, учитывающий только предельные отклонения звеньев размерной цепи и самые неблагоприятные их сочетания, обеспечивает заданную точность сборки без подгонки (подбора) деталей.
Обратная задача. Для вывода уравнений размера, предельных размеров, предельных отклонений и допуска замыкающего звена воспользуемся примером линейной размерной цепи, приведенной на рис. 2.63.
Искомые значения для замыкающего звена определятся выражениями: размер АD = А1 – А2; (2.6)
предельные размеры АDmax = A1max – A2min , АDmin = A1min – A2max; (2.7)
предельные отклонения Еs(AD) = Es(A1) – Ei(A2), Еi(AD) = Ei(A1)–Es(A2); (2.8)
допуск ТАD = ТА1 + ТА2. (2.9)
По аналогии с уравнениями (2.6) – (2.9) зависимости для замыкающего звена при линейной размерной цепи можно представить в общем виде:
размер  ;
(2.10)
;
(2.10)
![]() предельные
размеры
предельные
размеры  ;
;
 ;
;
![]()
|
 ;
;
 ;
;
допуск
![]() ,
(2.12)
,
(2.12)
где n – количество увеличивающих звеньев; k – количество уменьшающих звеньев; m – общее количество звеньв, включая замыкающее звено; Es – верхнее отклонение звена; Ei – нижнее отклонение звена.
Прямая задача. Такая задача встречается на практике чаще. После определения размеров составляющих звеньев в результате конструирования механизма необходимо рассчитать допуски на эти размеры при заданной точности сборки (заданном допуске исходного размера). Точность составляющих размеров должна быть такой, чтобы гарантировалась заданная точность исходного (функционального) размера. Эту задачу можно решать одним из рассмотренных далее способов.
Способ равных допусков применяют, если составляющие размеры имеют один порядок (например, входят в один интервал диаметров) и могут быть выполнены с примерно одинаковой экономической точностью. В этом случае из формулы (2.12) получим средний допуск на звено
ТсАi = TAD/(m-1).
Этот допуск корректируют для некоторых составляющих размеров в зависимости от их значений, конструктивных требований и технологических возможностей изготовления, но так, чтобы выполнялись условия по уравнениям (2.11) и (2.12). При этом выбирают стандартные поля допусков, желательно предпочтительного применения.
Способ равных допусков прост, но недостаточно точен, так как корректировка допусков составляющих размеров произвольна. Его можно рекомендовать только для предварительного назначения допусков составляющих размеров.
Способ допусков одного квалитета применяют, если все составляющие цепь размеры могут быть выполнены с допуском одного квалитета и допуски составляющих размеров зависят от их номинального значения.
Требуемый квалитет определяют следующим образом.
Допуск составляющего размера
ТАi = аi×ii , (2.13)
где i — единица допуска (мкм); а — число единиц допуска, содержащееся в допуске данного размера (определяется по ГОСТу 25346 - 89).
Для размеров от 1 до 500 мм ![]() , где D —
средний геометрический размер (мм) для интервала диаметров по ГОСТу 25346 - 89,
к которому относится данный линейный размер.
, где D —
средний геометрический размер (мм) для интервала диаметров по ГОСТу 25346 - 89,
к которому относится данный линейный размер.
Подставив выражение (2.13) в
уравнение (2.12) и решив его относительно а, получим:  . (2.14)
. (2.14)
По значению ас выбирают ближайший квалитет. Число единиц допуска ас, вычисленное по формуле (2.14), в общем случае не равно како-
му-либо значению а, определяющему квалитет, поэтому выбирают ближайший квалитет. Найдя по ГОСТу 25346 - 92 или по ГОСТу 25347 – 82* допуски составляющих размеров, корректируют их значения, учитывая конструктивно-эксплуатационные требования и возможность применения процесса изготовления, экономическая точность которого близка к требуемой точности размеров. Допуски для охватывающих размеров рекомендуется определять, как для основного отверстия, а для охватываемых — как для основного вала. При этом следует удовлетворить уравнению (2.12).
Найдя допуски, определяют значения и знаки верхних и нижних отклонений составляющих размеров так, чтобы они удовлетворяли уравнениям (2.11).
Решение прямой задачи способом назначения допусков одного квалитета более обосновано, чем решение способом равных допусков.
Пример 1. Рассчитать допуски и предельные отклонения для размеров А1, А3, А4 и А6 (рис. 2.64) при заданном АD = 1…3,5 мм.
Решим эту задачу методом полной взаимозаменяемости способом одного квалитета.
Согласно уравнению размерной цепи (2.10) AD = A2 + A3 + A4 + A5 + A6 - A1 = (25 + 50 + 107 + 21 + 40) – 240 = 3.
Определяем число единиц допуска или коэффициент квалитета. Для этого используем уравнение (2.14):
 ,
,
где iAi приняли по табл.3.3 [10]; k – количество звеньев с заданными допусками.
Зная число единиц допуска ас, по ГОСТу 25347 – 82* определяем номер квалитета. В рассматриваемом случае значение находится между IТ12 (а = 160) и IТ13 (а = 250).
Рекомендуется выбирать допуски по более грубому квалитету. Однако в нашем случае ас ближе к IТ12, поэтому допуски на размер корпуса А1 устанавливаем по IТ13, а на остальные (более технологичные в изготовлении размеры) – по IТ12.
Исходя из номинальных размеров звеньев цепи и выбранных квалитетов, по ГОСТу 25347-82* определяем допуски составляющих звеньев: ТА1 = 720 мкм; ТА3 = 250 мкм; ТА4 = 350 мкм; ТА6 = 250 мкм.
Произведем проверку суммы установленных допусков составляющих звеньев с остатком допуска замыкающего звена, который должен распределиться на оставшиеся составляющие звенья:
![]() .
1500 ¹ 720 + 250 +
350 + 250 = 1570.
.
1500 ¹ 720 + 250 +
350 + 250 = 1570.
Корректируем допуск одного составляющего звена так, чтобы получилось равенство допусков. Так как необходимо уменьшить допуск одного из звеньев, по конструкции узла следует проанализировать, какой размер экономически выгоднее выполнить более точным. Принимаем, что наиболее технологичны размеры А3 и А4.
Выбираем для корректировки размер А4 и уменьшаем допуск на его изготовление на 70 мкм: ТА4 = 280 мкм. В этом случае равенство допусков соблюдено.
Назначаем отклонения для всех составляющих звеньев.
В рассматриваемом примере на все размеры назначаем отклонения в минус, за исключением размеров А1 и А6, для которых отклонения назначаем симметрично.
Проставляем отклонения на размеры: A1 = 240 ± 0,360; A2 = 50 - 0,250;
A4 = 107- 0,280; A6 = 40 ± 0,125.
Производим проверку отклонений составляющих звеньев по отклонениям замыкающего звена: ESAD = ADmax - AD = 3,5 – 3 = + 0,5; EiAD = ADmin - AD = 1 – 3 = -2,0;
![]() .
.
Проверяем соответствие отклонений по уравнениям (2.11):
+0,5 = (0 + 0 + 0 + 0 + 0,125) – (-0,360) = 0,125 + 0,360.
Поставленное условие не удовлетворяется. Тогда принимаем неизвестными
отклонения для того звена, у которого корректировали допуск (нестандартный допуск),
т.е. ![]() .
.
Это звено увеличивающее, значит из уравнения (2.11) определяется его верхнее отклонение: + 0,5 – 0,125 – 0,360 = x; x = + 0,015.
Зная верхнее отклонение и допуск, определим нижнее отклонение по формуле
ei = + es – T; откуда
y = 0,015 – 0,280 = -0,265; ![]() .
.
Проверим второе отклонение по формуле (2.11):
-2,0 = (-0,250) + (-0,5)×2 + (-0,265)+ (-0,125) – (+0,360) = - 2,0.
Равенство удовлетворяется, значит все допуски и отклонения составляющих звеньев определены правильно.
2.11.3. Теоретико-вероятностный метод расчета размерных цепей
При расчете размерных цепей методом максимума — минимума предполагалось, что в процессе обработки или сборки возможно одновременное сочетание наибольших увеличивающих и наименьших уменьшающих размеров или обратное их сочетание. Оба случая наихудшие в смысле получения точности замыкающего звена, но они маловероятны, так как отклонения размеров в основном группируются около середины поля допуска. На этом положении и основан теоретико-вероятностный метод расчета размерных цепей.
Применение теории вероятностей позволяет расширить допуски составляющих размеров и тем самым облегчить изготовление деталей при практически ничтожном риске несоблюдения предельных значений замыкающего размера.
Обратная задача. В результате
совместного влияния систематических и случайных погрешностей центр
группирования может не совпадать с серединой поля допуска, а зона рассеяния — с
величиной допуска. Величина такого несовпадения, выраженная в долях половины
допуска на размер, называется коэффициентом асимметрии,  ,
,
где М(Аi) – математическое ожидание, средний арифметический размер i – го звена; Aсi – размер, соответствующий середине поля допуска.
В этом случае уравнение размерной цепи по средним размерам будет иметь вид
 . (2.15)
. (2.15)
Используя теорему о дисперсии [D(xi)
=si2] суммы независимых случайных величин, можно
записать: ![]() . (2.16)
. (2.16)
Для перехода от средних квадратических отклонений s к допускам или полям рассеяния используют коэффициенты относительного рассеяния li. Он является относительным средним квадратическим отклонением и равен (при поле рассеяния wj = Tj)
lj = 2sj/Tj . (2.17)
Для закона нормального распределения
(при Tj = 6sj )  ;
;
для закона равной вероятности (при ![]() )
)  ;
;
для закона треугольника (Симпсона)
(при ![]() )
)  .
.
Подставив выражение (2.17) в уравнение (2.16), получим:
 или
или  ,
(2.18)
,
(2.18)
где t – коэффициент, зависящий от процента риска и принимаемый по данным [10].
Определив
ТАD по формуле (2.18),
вычисляют среднее отклонение замыкающего звена как Ес(АD) =  (2.19)
(2.19)
и его предельные отклонения:
Еs(АD) = Ес(АD) + TAD/2; Еi(АD) = Ес(АD) - TAD/2. (2.20)
Прямая задача. Допуски составляющих размеров цепи при заданном допуске исходного размера можно рассчитывать четырьмя способами.
При способе равных допусков принимают, что величины ТАj, Ec(Aj) и lj для всех составляющих размеров одинаковы. По заданному допуску TAD по формуле (2.18) определяют средние допуски TcAj:
 .
.
Найденные значения TcAj и Ec(Aj) корректируют, учитывая требования конструкции и возможность применения процессов изготовления деталей, экономическая точность которых близка к требуемой точности размеров. Правильность решения задачи проверяют по формуле (2.18).
При способе назначения допусков
одного квалитета расчет в общем аналогичен решению прямой задачи методом
полной взаимозаменяемости. При этом среднее количество единиц допуска
определится по формуле  .
.
Способ пробных расчетов [50] заключается в том, что допуски на составляющие размеры назначают экономически целесообразными для условий предстоящего вида производства с учетом конструктивных требований, опыта эксплуатации имеющихся подобных механизмов и проверенных для данного производства значений коэффициентов l. Правильность расчета проверяют по формуле (2.18).
Способ равного влияния [50]применяют при решении плоских и пространственных размерных цепей. Он основан на том, что допускаемое отклонение каждого составляющего размера должно вызывать одинаковое изменение исходного размера.
Пример 2. Рассчитать допуски и предельные отклонения для размеров А1, А3, А4
и А6 (см. рис. 2.64) при заданном АD = 1…2,12 мм. ТАD = 1,12 мм.
Воспользуемся способом одного квалитета. Расчет ведется в той же последовательности, что и в примере 1.
Определяем коэффициент квалитета как
 ;
;
 ,
,
где iAi приняли по табл.3.3 [10]; k – количество звеньев с заданными допусками.
По ГОСТу 25347 – 82* определяем, что значение аС, равное 204, находится между по IT12 = 160 и IT13 = 250. По этому же стандарту определяем допуски на все размеры по IT12: ТА1 = 0,460; TA3 = 0,250; TA4 = 0,350; TA6 = 0,250.
Определяем допуск замыкающего звена по уравнению (2.18):
 ,
,
где lАi = 1/3 - коэффициент относительного рассеяния размеров для нормального закона распределения; t = 3 – коэффициент, характеризующий процент выхода расчетных отклонений за пределы допуска, задается в зависимости от процента риска (Р = 0,27%) [10].
Условие не выполнено, т. е. 1,12 ¹ 0,97.
Чтобы получить равенство допусков, допуск одного из звеньев следует увеличить. Для этого выбираем звено А1 (корпус) и определяем его допуск:
 .
.
Назначаем отклонения составляющих звеньев аналогично предыдущему примеру:
A1 = 240 ± 0,355; A2 = 25-0,5; A3 = 50-0,25; A4 = 107-0,35; A5 = 21-0,5; A6 = 40 ± 0,125.
Определяем координаты центров группирования размеров, приняв коэффициент асимметрии ai равным нулю. Это означает, что рассеяние всех составляющих звеньев симметрично относительно середины поля допуска, и координаты центров группирования размеров будут соответствовать координатам середин полей допусков: ЕСА1 = 0; ECA2 = -0,25; ECA3 = -0,125; ECA4 = -0,175; ECA5 = -0,25; ECA6 = 0.
Определяем отклонения и координаты середины поля допуска замыкающего звена: ESAD = ADmax - AD = 2,12 – 3 = - 0,88; iAD = ADmin - AD = 1,0 – 3 = -2,0;
ECAD = ![]()
Проверяем координаты середин полей допусков по уравнению (2.19):
-1,44 ¹ [(-0,25) + (-0,125) + (-0,175) + (-0,25) + 0] – 0 = -0,8.
Для обеспечения равенства корректируем координату середины поля допуска звена А1: ECA1 = -0,8 – (-1,44) = +0,64.
Определяем отклонения звена А1:EsA1 = ECA1 + ТА1/2 = +0,64 + 0,71/2 = +0,995;
EiA1 = ECA1 - ТА1/2 = +0,64 - ,71/2 = +0,285. Звено А1 = 240![]() .
.
Проверка. Так как равенства в уравнениях (2.18) и (2.19) выдержаны, проверяем предельные отклонения замыкающего звена АD по формулам (2.20):
ЕsAD = -1,44 + 1,12/2 = - 0,88; EiAD = -1,44 - 1,12/2 = -2,0.
Требования по замыкающему звену выдержаны.
2.11.4. Метод групповой взаимозаменяемости при селективной сборке [50]
Сущность метода групповой взаимозаменяемости заключается в изготовлении деталей со сравнительно широкими технологически выполнимыми допусками, выбираемыми из соответствующих стандартов, сортировке деталей на равное число групп с более узкими групповыми допусками и сборке их (после комплектования) по одноименным группам. Такую сборку называют селективной.
Метод групповой взаимозаменяемости применяют, когда средняя точность размеров цепи очень высокая и экономически неприемлемая.
При селективной сборке (в посадках с зазором и натягом) наибольшие зазоры и натяги уменьшаются, а наименьшие - увеличиваются, приближаясь с увеличением числа групп сортировки к среднему значению зазора или натяга для данной посадки, что делает соединения более стабильными и долговечными (рис. 2.65). В переходных посадках наибольшие натяги и зазоры уменьшаются, приближаясь с увеличением числа групп сортировки к значению натяга или зазора, которое соответствует серединам полей допусков деталей.
Для установления числа групп п сортировки деталей необходимо знать требуемые предельные значения групповых зазоров или натягов, которые находят из условия обеспечения наибольшей долговечности соединения, либо допускаемое значение группового допуска ТDгр или Tdгр, определяемое экономической точностью сборки и сортировки деталей, а также возможной погрешностью их формы. Отклонения формы не должны превышать группового допуска, иначе одна и та же деталь может попасть в разные (ближайшие) группы в зависимости от того, в каком сечении она измерена при сортировке.
При селективной сборке изделий с посадкой, в которой ТD = Td, групповой зазор или натяг остаются постоянными при переходе от одной группы к другой (см. рис. 2.65, а).
При ТD > Td групповой зазор (или натяг) при переходе от одной группы к другой не остается постоянным (см. рис. 2.65, б), следовательно, однородность соединений не обеспечивается, поэтому селективную сборку целесообразно применять только при ТD =Td.
Селективную сборку применяют не только в сопряжениях гладких деталей цилиндрической формы, но и в более сложных по форме деталях (например, резьбовых). Селективная сборка позволяет в п раз повысить точность сборки (точность соединения) без уменьшения допусков на изготовление деталей или обеспечить заданную точность сборки при расширении допусков до экономически целесообразных величин.
Вместе с тем селективная сборка имеет недостатки: усложняется контроль (требуются больший штат контролеров, более точные измерительные средства, контрольно-сортировочные автоматы); повышается трудоемкость процесса сборки (в результате создания сортировочных групп); возможно увеличение незавершенного производства вследствие разного числа деталей в парных группах.
Для сокращения объемов незавершенного производства, образующегося при селективной сборке, применяют статистические методы анализа фактического распределения размеров по группам и вводят необходимую корректировку в разбиение по группам.
2.11.5. Метод регулирования и пригонки
Метод регулирования. Под методом регулирования понимают расчет размерных цепей, при котором требуемая точность исходного (замыкающего) звена достигается преднамеренным изменением без удаления материала (регулированием) одного из заранее выбранных составляющих размеров, называемого компенсирующим (на схеме размерной цепи компенсирующее звено заключают в прямоугольник). Роль компенсатора обычно выполняет специальное звено в виде прокладки, регулируемого упора, клина и т. д. При этом по всем остальным размерам цепи детали обрабатывают по расширенным допускам, экономически приемлемым для данных производственных условий.
Номинальный размер компенсирующего
звена АК. в соответствии с выражением (2.10)  .
.
Значение АК берут со знаком плюс, если размер является увеличивающим, и минус – для уменьшающих размеров.
Допуск замыкающего звена ![]() ,
,
где ТАD — заданный допуск исходного размера, определяемый исходя из эксплуатационных требований; ТАi — принятые расширенные технологически выполнимые допуски составляющих размеров; VK - наибольшее возможное расчетное отклонение, выходящее за пределы поля допуска исходного звена, подлежащее компенсации.
Замыкающий размер изменяют (регулируют) с помощью компенсаторов, которые могут быть неподвижными и подвижными. Неподвижные компенсаторы чаще всего выполняют в виде промежуточных колец, набора прокладок и других подобных сменных деталей.
Толщина s каждой сменной прокладки должна быть меньше допуска исходного размера ТАD и определяется по выражению s = (VK/N) < TAD, где N – количество прокладок. Необходимо, чтобы N ³ (VK/TAD).
Для условий, когда допуском на изготовление компенсатора ТК можно пренебречь, обычно принимают N = (VK/TAD) + 1. (2.21)
Если этого сделать нельзя, то формула (2.21) принимает вид
N = [VK/(TAD - ТК)] + 1.
Округляя значение s до ближайшего меньшего нормального размера, получают окончательное число сменных прокладок N = (VK/s).
Метод пригонки. При этом методе предписанная точность исходного размера достигается дополнительной обработкой при сборке детали по одному из заранее намеченных составляющих размеров цепи. Здесь детали по всем размерам, входящим в цепь, изготовляют с допусками, экономически приемлемыми для данных условий производства. Чтобы осуществлять пригонку по предварительно выбранному размеру, необходимо по этому размеру оставлять припуск, достаточный для компенсации исходного размера. Этот припуск должен быть наименьшим для сокращения объема пригоночных работ.
2.11.6. Расчет плоских и пространственных размерных цепей
Плоские и пространственные размерные цепи рассчитывают теми же методами, что и линейные. Необходимо лишь привести их к виду линейных размерных цепей. Это достигается путем проектирования размеров плоской цепи на одно направление, обычно совпадающее с направлением исходного (или замыкающего) размера, а пространственной цепи - на две или три взаимно перпендикулярные оси.
По формулам (2.12) и (2.18) определим
допуск замыкающего размера: методом расчета на максимум-минимум  ; (2.22)
; (2.22)
теоретико-вероятностным методом  . (2.23)
. (2.23)
В
соответствие с выражением (2.10) получим уравнение замыкающего
звена  . (2.24)
. (2.24)
По аналоги с уравнением (2.15) определится координата середины поля допуска замыкающего звена при смещении ее относительно середины поля рассеяния при теоретико-вероятностном методе расчета:

 . (2.25)
. (2.25)
В уравнениях (2.22) – (2.25) дАD!дАj — частная производная функция замыкающего размера по j-му составляющему размеру; ее называют также передаточным отношением .
Передаточные отношения характеризуют степень и характер влияния погрешностей размеров составляющих звеньев на замыкающее. Для цепей с параллельными звеньями при расчете допусков все передаточные отношения равны единице (для увеличивающих размеров) или минус единице (для уменьшающих).
Определим размер АD и допуск ТАD замыкающего размера плоской размерной цепи, представленной на рис. 2.66.
Номинальные размеры и отклонения составляющих размеров, а также углы их наклона заданы. Углы b и g допусками не ограничены. Передаточные отношения дАD!дА1 = cosb; дАD!дА2 = 1; дАD!дА3 = cosg.
Номинальный размер по формуле (2.24)
АD = А1 cosb +А2 + А3 cosg.
Допуск замыкающего размера по формуле (2.22)
ТАD = ТА1 cosb + ТА2 + ТА3 cosg.
При расчете цепи теоретико-вероятностным методом следует воспользоваться зависимостями (2.23) – (2.25).
| Практические расчёты посадок, размерных цепей, калибров в ... | |
|
Overview Первое Седьмое Sheet 1: Первое Рaсчёт посадок Dном. ES EI es ei Dmax Dmin dmax dmin Smax Smin Tотв. Tвала Tпосадки Ts 32 0.04 0 32.04 32 32 ... Посадку F9/h8 применяют, например, для подшипников скольжения двухопорных валов, работающих при значительной частоте вращения, а также для валов с широко разнесёнными опорами, для ... По [18] определяем предельные отклонения и допуски резьбы для гайки М2 - 6Н и болта М2 - 6g для всех трёх диаметров. |
Раздел: Рефераты по технологии Тип: реферат |
| Размерный анализ сборочной единицы (промежуточного вала редуктора) | |
|
МIНIСТЕРСТВО ОСВIТИ І НАУКИ УКРАѬНИ ДОНЕЦЬКИЙ НАЦIОНАЛЬНИЙ ТЕХНIЧНИЙ УНИВЕРСИТЕТ КУРСОВИЙ ПРОЕКТ з дисципліни "Взаємозамінність, стандартизація та ... Так как выбор полей допусков отверстия и вала ничем не обусловлен, то назначаю посадку с гарантированным зазором , Допуски диаметров резьбы для 6-й степени точности при нормальной длине свинчивания определяем по [5, с.161.162 ] |
Раздел: Промышленность, производство Тип: курсовая работа |
| Соединения деталей и узлов машин | |
|
РЕФЕРАТ На тему: "Соединения деталей и узлов машин" Проверил: _ Иванов Л. П. >_2008 г. Выполнил: Кузнецов Н.П. >_2008 г. Оренбург 2008 При третьем типе центрирования минимальный зазор устанавливают по боковым сторонам зубьев и значительные зазоры по поверхностям диаметров D и d. Стандартом предусмотрены три формы ... В реальных соединениях имеются погрешности в угловом шаге зубьев вала и втулки, а также радиальные зазоры, которые приводят к существенно неравномерному распределению нагрузки в ... |
Раздел: Промышленность, производство Тип: реферат |
| Технологический процесс изготовления вала ведущего | |
|
Введение Уровень сельскохозяйственного машиностроения является определяющим фактором всего хозяйственного комплекса страны. Важнейшими условиями ... Поверхности 8 детали (рис. 1) предназначена для посадки с зазором на неё колеса зубчатого, а поверхность 8 - для посадки с натягом колеса зубчатого. Жесткость вала допускает получение высокой точности обработки (жесткость вала считается недостаточной, если для получения точности 6.9-го квалитетов отношение его длины l к ... |
Раздел: Промышленность, производство Тип: курсовая работа |
| Технические измерения | |
|
4. Технические измерения 4.1. Линейные измерения Меры длины концевые плоскопараллельные. Широко используются плоскопараллельные концевые меры длины в ... ТPL - допуск наружного и среднего диаметра резьбового проходного и непроходного калибров-пробок; ТR - допуск внутреннего и среднего диаметра резьбового проходного и непроходного ... 4.46) и т. п. Для повышения точности измерения учитывают погрешности диаметра проволочек, шага, угла профиля, угла подъема резьбы, деформации витков и др. |
Раздел: Промышленность, производство Тип: шпаргалка |