Курсовая работа: Расчет коробки подач горизонально-фрезерного станка
Министерство образования и науки Украины
ДОНЕЦЬКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Механический факультет
Кафедра: "Металорізальні верстати та інструмент"
КУРСОВИЙ ПРОЕКТ
По предмету: "Металообрабатывающее оборудование"
На тему: "Расчет коробки подач горизонально-фрезерного верстата"
Исполнитель
Студент гр. МВС-03а Горбатов А.С.
Консультант ГусевВ.В.
Нормо контролер Гусев В.В.
Донецьк 2007
РЕФЕРАТ
Курсовой проект: с., табл., рис., источников, приложения.
Объект исследования – коробка подач горизонтально – фрезерного станка.
В курсовом проекте выбран электродвигатель, определены передаточные отношения каждой ступени коробки, а также мощности, крутящие моменты, частоты вращения каждого вала. Рассчитаны модули для каждой передачи. Определены основные размеры зубчатых колёс. Спроектированы передачи и проведён расчёт наиболее нагружённого вала. Выбрана система смазки и смазочный материал деталей станка. Выбраны электромагнитные муфты и подшипники качения, а также выбраны и рассчитаны шпоночные соединения. Выполнены чертежи развёртки и свёртки коробки подач, общего вида горизонтально – фрезерного станка, кинематическая схема и график частот вращения.
СТАНОК, ВАЛ, ПОДШИПНИК, КОРОБКА ПОДАЧ, ЗУБЧАТЫЙ БЛОК, КИНИМАТИЧЕСКАЯ СТРУКТУРА, МОДУЛЬ, ПЕРЕДАТОЧНОЕ ОТНОШЕНИЕ, ЗУБЧАТОЕ КОЛЕСО.
ЗАДАНИЕ
Согласно [2, с.8, табл. 2.1] номеру варианта №97 выбираем задание.
Спроектировать коробку подач для горизонтально – фрезерного станка.
Исходные данные:
Основной размер 400×1600 – размер стола.
Знаменатель геометрической
прогрессии: ![]() .
.
Предельные значения подач: ![]() м/мин.
м/мин.
Примечание ЧПУ
СОДЕРЖАНИЕ
1. Общая характеристика и назначение металлорежущих станков, для которых проектируется привод
1.1 Общие сведения о группе станков, для которых проектируется привод
1.2 Особенности привода
1.3 Особенности проектирования привода
1.4 Технологическое обоснование технических характеристик станков
2. Выбор предельных режимов резания и электродвигателя
2.1 Размеры заготовок и инструментов
2.2 Выбор предельных режимов резания
2.2.1 Выбор предельных режимов резания Vmax
2.2.2 Выбор предельных режимов резания Vmin
2.3 Определение предварительной мощности электродвигателя главного движения
2.4 Выбор электродвигателя
3. Технические требования к приводу станка
4. Кинематический расчет привода станка
4.1 Диапазоны регулирования станка
4.2 Разработка и построение структурных сеток и графиков чисел оборотов
4.3 Выбор чисел зубьев и определение действительных частот вращения
4.3.1 Подбор чисел зубьев
4.3.2 Расчет погрешностей кинематических цепей станка
4.3.3 Разработка кинематической схемы привода
5. Силовой расчет привода станка
5.1 Расчет коэффициента полезного действия
5.2 Мощность холостого хода
5.3 Расчетный КПД станка
5.4 Мощность главного двигателя
5.5 Определение коэффициента полезного действия
5.6 Расчет крутящих моментов на валах приводов станков
6. Прочностной расчет основных элементов коробки скоростей
6.1 Расчет на прочность зубчатых колес
6.1.1 Расчет первой передачи
6.1.2 Расчет второй передачи
6.1.3 Расчет третьей передачи
6.2 Расчет геометрических параметров зубчатых колес
6.3 Предварительный расчет диаметров валов
6.4 Уточненный (проверочный) расчет валов
7. Выбор и расчет шпоночных соединений
7.1 Выбор шпоночных и шлицевых соединений
7.2 Расчет шпоночного соединения
8. Выбор и расчет подшипников
8.1 Выбор подшипников
8.2 Проверочный расчет подшипников расчетного вала
9. Выбор ирасчет муфт
9.1 Выбор и расчет электромагнитных муфт
10. Разработка системы управления
11. Определение системы смазки
ЗАКЛЮЧЕНИЕ
СПИСОК ЛИТЕРАТУРЫ
ВВЕДЕНИЕ
Перед станкостроением всегда будет стоять задача – создание металлорежущих станков, отвечающих современным требованиям машиностроения. Следовательно, требуется создание станков высокой производительности, точности и экономичности.
В настоящее время наблюдается тенденция на повышение уровня автоматизации производственных процессов. В производство все более внедряется автоматизированное оборудование, работающее без непосредственного участия человека или значительно облегчающее труд рабочего. Это позволяет сократить трудоемкость производственного процесса, снизить себестоимость выпускаемой продукции, увеличить производительность труда. Поэтому главная задача инженеров – разработка автоматизированного оборудования, расчет его основных узлов и агрегатов, выявление наиболее оптимальных технических решений и внедрение их в производство.
Целью данного курсового проекта является разработка автоматической коробки подач горизонтально – фрезерного станка, переключение передач в которой осуществляется при помощи электромагнитных муфт.
1. Общая характеристика и назначение металлорежущих станков, для которых проектируется привод
1.1 Общие сведения о группе станков, для которых проектируется привод
В станках шестой (фрезерной) группы (по классификации ЭНИМС) инструмент имеет вращательное движение резания, а движения подачи чаще всего получает заготовка, закрепленная на столе или барабане станка. Станки имеют много разновидностей: вертикальные и горизонтальные консольные, непрерывные, копировальные, бесконсольные вертикальные, широкоуниверсальные, продольные и др. Обычные фрезерные станки предназначены для работы насадными, торцовыми, концевыми и другими фрезами при обработке плоскостей, пазов, канавок и т. п.
Станки предназначены для выполнения разнообразных фрезерных работ цилиндрическими, торцевыми, концевыми, фасонными и другими фрезами. Применяются для обработки горизонтальных и вертикальных плоскостей, пазов, рамок, углов, зубчатых колес, спиралей, моделей штампов, пресс-форм и других деталей из стали, чугуна, цветных металлов, их сплавов и других материалов. Высокая жесткость станков позволяет применять фрезы, изготовленные из быстрорежущей стали, а также инструмент, оснащенный пластинками из твердых и сверхтвердых синтетических материалов. Большая мощность привода главного движения и тяговое усилие продольной подачи стола позволяют производить за один проход обработку широких горизонтальных поверхностей набором цилиндрических или фасонных фрез, установленных на горизонтальной оправке.
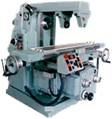
Рис.1.1 Горизонтально-фрезерный станок 6Т82
Станки моделей 6Т82 и 6Т83 оснащены столом, поворачивающимся вокруг вертикальной оси на угол ±45њ, что обеспечивает возможность нарезания косозубых зубчатых колес, червяков и других деталей, имеющих обрабатываемую поверхность в виде спирали.
Горизонтально-фрезерные консольные станки отличаются наличием консоли и горизонтальным расположением шпинделя при обработке цилиндрическими, угловыми и фасонными фрезами плоских и фасонных поверхностей заготовок из различных материалов. Могут также использоваться торцовые и концевые фрезы. Универсальные станки этого вида отличаются тем, что их стол может поворачиваться относительно вертикальной оси ±45°, что позволяет вести обработку винтовых канавок на цилиндрических поверхностях с использованием делительной головки. Столы этих станков имеют размер от 160 х 630 мм (мод. 6Н80Г) до 400 х 1600 мм (мод. 6М83) и имеют продольные Т-образные пазы для установки различных приспособлений. Ширина этих пазов обычно 14—28 мм. Этот размер следует учитывать при подборе или конструировании приспособления.
Станки фрезерной группы включают металлорежущее оборудование, предназначенное для обработки конкретных заготовок или видов поверхностей: резьбофрезерные, шпоночно-фрезерные, шлицефрезерные, а также станки для обработки шлицев корончатых гаек, канавок спиральных и центровочных сверл, канавок шпоночных и дисковых фрез, плоскостей слитков и т. д.
Основные узлы и рабочие движения консольных станков. Консольные фрезерные станки отличаются от бесконсольных устройством механизма вертикальной подачи: консоль, несущая стол станка, имеет возможность вертикального перемещения. У бесконсольных станков вертикальную подачу совершает шпиндельная бабка. Исследования показывают более высокую точность бесконсольных (горизонтальных и вертикальных) станков. Для повышения точности станков консольного типа применяют специальные поддержки скрепляющие консоль с хоботом станка.
Универсально-фрезерный консольный станок мод. 6Р82, показанный на рис. 2, предназначен для фрезерования заготовок из стали, чугуна и цветных металлов твердосплавными и быстрорежущими фрезами. Шпиндель 5 станка расположен горизонтально. Станок имеет электродвигатель 3 привода вращения шпинделя с фрезой и электродвигатель подачи 13.
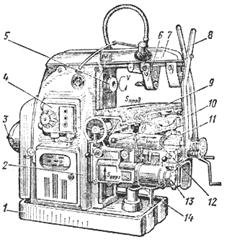
Рис.1.2 Горизонтально-фрезерный станок 6Р82
Изменение частоты вращения шпинделя посредством коробки скоростей 4, расположенной внутри станины 2, и величины подачи стола с помощью коробки подач 14, находящейся внутри консоли 11 станка, осуществляется преселективно, т, е. поворотом лимба без прохождения промежуточных ступеней. Стол перемещается в трех взаимно перпендикулярных направлениях с рабочими подачами Sпрод, Sпоп, sb и ускоренно. Стол 9 универсального станка может поворачиваться относительно вертикальной оси, что позволяет обрабатывать винтовые канавки сверл, червяков и т. п. Станок покоится на фундаментной плите 1. Стол перемещается в направляющих поворотной плиты 10, расположенной на поперечных салазках 12. Оправка с фрезой поддерживается подвесками 6, перемещаемыми на хоботе 7 станка.
1.2 Особенности привода
Приводы металлорежущих станков предназначены для осуществления рабочих, вспомогательных и установочных перемещений инструментов и заготовки. Их делят на приводы главного движения – скорости резания и приводы подач – координатных перемещений и вспомогательных перемещений. К каждому виду привода, с учетом служебного назначения станка, предъявляют свои требования по передаче силы, обеспечению постоянства скорости, ее изменения и настройки, точности перемещения и погрешности позиционирования узла, быстродействию, надежности, стоимости, габаритным размерам.
В данном курсовом проекте будет рассматриваться привод главного движения с бесступенчатым регулированием. Основными достоинствами привода с бесступенчатым регулированием является повышение производительности обработки за счет точной настройки оптимальной по режимам резания скорости, возможность плавного перемещения скорости во время работы, простота автоматизации процесса переключения скоростей. Для бесступенчатого изменения скорости применяют регулируемые двигатели.
Для бесступенчатого регулирования скорости применяют двигатели постоянного тока с тиристорной системой управления. Эти двигатели применяют в станках с ЧПУ, большинство многооперационных станков оснащают такими двигателями.
В приводе главного движения применяют регулируемые за счет изменения частоты тока асинхронные электродвигатели. Эти двигатели обладают высокой надежностью, жесткой характеристикой и обеспечивают регулирование с постоянной мощностью во всем диапазоне.
1.3 Особенности проектирования привода
Приводы главного движения различают по виду приводного двигателя, способу переключения частот вращения и компоновке.
Способ переключения передач определяется назначением станка и в основном от частоты переключения, необходимости автоматизации и дистанционного управления приводом.
В автоматических станках переключение скоростей часто осуществляется с помощью электромагнитных фрикционных или зубчатых муфт. Применение электромагнитных фрикционных муфт позволяет переключать скорости в процессе работы станка, однако уменьшает КПД станка, так как все зубчатые передачи находятся в зацеплении, и существует повышенное трение в дисках.
Автоматические коробки скоростей с элекромуфтами (АКС) выпускают, централизовано с 9, 12 и 18 ступенями семи габаритов, рассчитанные на мощности от 1,5 до 55кВт. Так как электромагнитные муфты нежелательно встраивать в шпиндельные бабки станков, то в станках с ЧПУ в приводах с двигателем постоянного тока применят зубчатые передачи, переключаемые автоматически с помощью электромеханических приводов.
Компоновка привода главного движения определяется общей компоновкой станка, связанной с его служебным назначением и компоновкой станка и типоразмером, а также связями между отдельными элементами привода. При раздельном приводе механическая часть состоит из двух узлов: коробки скоростей и шпиндельной бабки, соединяемой ременной передачей. По такому примеру конструируют приводы станков с ЧПУ с обычным асинхронным двигателем и АКС.
1.4 Технологическое обоснование технических характеристик станков
Горизонтально-фрезерные консольные станки отличаются наличием консоли и горизонтальным расположением шпинделя при обработке цилиндрическими, угловыми и фасонными фрезами плоских и фасонных поверхностей заготовок из различных материалов. Могут также использоваться торцовые и концевые фрезы. Универсальные станки этого вида отличаются тем, что их стол может поворачиваться относительно вертикальной оси ±45°, что позволяет вести обработку винтовых канавок на цилиндрических поверхностях с использованием делительной головки. Столы этих станков имеют размер от 160 х 630 мм (мод. 6Н80Г) до 400 х 1600 мм (мод. 6М83) и имеют продольные Т-образные пазы для установки различных приспособлений. Ширина этих пазов обычно 14—28 мм. Этот размер следует учитывать при подборе или конструировании приспособления.
Основные узлы и рабочие движения консольных станков. Консольные фрезерные станки отличаются от бесконсольных устройством механизма вертикальной подачи: консоль, несущая стол станка, имеет возможность вертикального перемещения. У бесконсольных станков вертикальную подачу совершает шпиндельная бабка. Исследования показывают более высокую точность бесконсольных (горизонтальных и вертикальных) станков. Для повышения точности станков консольного типа применяют специальные поддержки скрепляющие консоль с хоботом станка.
Технологические возможности станка могут быть расширены применением делительной головки, поворотного круглого стола и накладной- универсальной головки. Станок может быть настроен на ряд автоматических циклов. Горизонтальный станок отличается от описанного отсутствием возможности поворота стола, а вертикальный также и компоновкой шпиндельного узла (см. рис. 153,а). На консольных фрезерных станках обрабатывают вертикальные, горизонтальные и наклонные плоскости, пазы, углы, уступы и т. п.
Вспомогательный инструмент и нормальные приспособления станков. Приспособления для закрепления режущего инструмента на фрезерных станках или вспомогательные инструменты фрезерных станков позволяют устанавливать на станке насадные, хвостовые, концевые фрезы и фрезерные головки. Конструкция вспомогательного инструмента зависит от конструкции крепежно-присоединительной части фрезы, оформления присоединительных элементов станка, соотношения размеров фрезы и шпинделя и ряда других факторов. Фрезы, имеющие цилиндрический хвостовик, закрепляются в цанговые или других центрирующих ось фрезы патронах, а сам патрон крепится в шпинделе станка. Фрезы с коническим хвостовиком могут крепиться непосредственно в шпинделе или через втулку. Следует отметить, что конус шпинделя ряда станков имеет конусность 7:24, при этом угол конуса превышает угол трения втулки о шпиндель и соединение становится несамотормозящим, что требует принудительной затяжки инструмента в отверстие шпинделя. Эта затяжка осуществляется так называемым шомполом, т. е. длинной шпилькой, ввернутой в резьбовое отверстие хвостовика фрезы. Крутящий момент передается со шпинделя через сухари и торцовые пазы втулки на корпус фрезы. Насадные фрезы своим отверстием базируются на оправке. При консольном расположении фрезы крутящий момент передается продольной шпонкой, а винт закрепляет фрезу на оправке. Цилиндрические насадные фрезы закрепляются на длинной оправке. Положение набора фрез вдоль оси фиксируется также установочными кольцами. Оправка 5 одним концом крепится в шпинделе 1, а другим — в серьге или подвеске станка. Двухопорное закрепление повышает жесткость технологической системы. При работе набором фрез для регулировки расстояния между фрезами иногда используется раздвижное кольцо 3. Торцовые фрезы большого диаметра (свыше 250 мм) крепятся на шпинделе четырьмя винтами, центрируются пояском шпинделя, а крутящий момент передается двумя торцовыми шпонками.
Станочные приспособления используются для установки заготовок на столе, т. е. для ориентации заготовки относительно координатных осей и для надежного закрепления ее в этом положении. Для фрезерных станков характерно широкое применение таких универсальных приспособлений, как станочные тиски, столы, делительные головки и элементарные зажимные устройства (рис. 156). В условиях серийного и массового производства применяют специальные приспособления для обработки конкретной заготовки или группы заготовок. В ряде случаев используют дополнительные устройства, расширяющие технологические возможности фрезерных станков: головки, изменяющие положение шпинделя, что позволяет работать фрезой с горизонтальной или вертикальной осью; головки, позволяющие долбить заготовку, вести копировальные работы на обычных фрезерных станках и т. п. Станочные тиски могут иметь, кроме винтовых, зажимные элементы в виде эксцентриков, пневматических камер, гидравлических цилиндров, пружин, рычагов и т. п. Различают тиски неповоротные и поворотные относительно двух взаимно перпендикулярных осей. Тиски обеспечивают надежное, быстрое закрепление заготовки при малых собственных размерах и высокой жесткости. Известны тиски с одной подвижной губкой, самоцентрирующие (с двумя подвижными губками), с "плавающими" губками и т. п. В ряде случаев применяют специальные губки, по форме зажимной поверхности для закрепления заготовок сложной формы (цилиндрических, для лопаток турбин и т. п.).
2. Выбор предельных режимов резания и электродвигателя
2.1 Размеры заготовок и инструментов
| ТИП СТАНКА | Диаметр заготовки или инструмента, мм. | |
|
Dmax |
Dmin |
|
|
Горизонтально-фрезерный со столом шириной Вс, мм. |
(0,4-0,5)Вс |
(0,1-0,2)Вс |
Размеры заготовок и инструментов подлежащих обработке на универсальных станках, определяются из экономичских соображений, связывая их с одной из размерных характеристик станка. В таблице 1.1 приведены ориентировочные значения предельных размеров заготовок и инструментов, которые принимаются при проектировании универсальных станков.
Расчитуем диаметр инструмента:
Dmax.=0.4*400=160мм.
Dmin =0.15*400=60мм.
Таблица 2.2 Ширина фрезерования
| ТИП СТАНКА | Расчетная ширина фрезерования, мм | |
| Вmax | Bmin | |
|
Горизонтально-фрезерный со столом шириной Вс, мм. |
(0.75-1.0)Dфр.мах. |
(0,75-1,0)Dфр.min |
Исходя из таблицы 2.2 расчитуем ширину фрезерования:
Вмах.=0,75*160=120мм.
Вmin=0,75*60=45мм.
2.2 Выбор предельных режимов резания
2.2.1 Выбор предельных режимов резания Vmax
Наибольшая скорость резания Vmax.
Заготовка: Стальная заготовка Ġв=500МПа.
Инструмент: Цилиндрическая фреза, пластинки из твердого сплава Т15К6.
Vmax.= ![]() ;
;
В=45; t=2; Sz=0,17; Cv=390; qv=0.17; yv=0.28; Uv=0,05; Pv=0.1; m=0.33;T=120мин.; Z=14;
Vmax = ![]()
![]() об/мин.
об/мин.
Сила резания определяется по формуле:
![]()
Сp=101; Xp=0.88; Yp= 0.75; Up=1.0; ωp=0; qp=0.87;
![]()
2.2.2 Выбор предельных режимов резания Vmin
Инструмент: Цилиндрическая фреза, быстрорежущая сталь Р18;
![]() ;
;
B=120; t=2,5; Sz=0.12; Cv=55; qv=0,45; Xv=0.3; Yv=0.4; Uv=0.1; Pv=0.1; m=0.33; Т=120мин.; Z=8;
![]()
![]() об/мин;
об/мин;
Сила резания определяется по формуле:
![]()
Сp=68,2; Xp=0.86; Yp= 0.72; Up=1; ωp=0; qp=0,86;
![]()
Условная расчетная частота:
![]() ;
;
![]() ;
;
![]() об/мин;
об/мин;
Условная расчетная частота попадает в диапазон частот данный по заданию.
2.3 Определение предварительной мощности электродвигателя главного движения
Предварительное определение мощности электродвигателя главного движения определяется по формуле:
![]()
где ŋ – КПД цепи главного движения ( ŋ = 0,7-0,85).
![]()
![]()
![]()
2.4 Выбор электродвигателя
Выбираем двигатель серии
4П, ближайший по мощности двигатель 4ПФ112S с креплением на фланце, мощностью ![]() кВт, частотой вращения
кВт, частотой вращения ![]() .
. ![]() ;
; ![]() ;
;
![]() ;
; ![]()
3. Технические требования к приводу станка
Приводы металлорежущих станков предназначены для осуществления рабочих, вспомогательных и установочных перемещений инструментов и заготовки. Их делят на приводы главного движения - скорости резания и приводы подач – координатных перемещений. К каждому виду привода, с учетом служебного назначения станка ,предъявляют свои специфические требования по передаче силы, обеспечению постоянства скорости, ее изменения и настройки, точности перемещения и погрешности позиционирования узла, быстродействию, надежности, стоймости, габаритным размерам.
Важнейшим и исходными данными для проектирования привода главного движения являются диапазон регулирования частоты вращения и мощности передаваемые приводом.
В данном проекте рассматривается привод с бесступенчатым регулированием скорости. Основные достоинства приводов с бесступенчатым регулированием – повышение производительности обработки за счет точной настройки оптимальной по режимам резанием скорости, возможность плавного перемещения скорости во время работы, простота автоматизации процесса переключения скоростей. Производительность станка определяется его способностью обеспечивать обработку определенного числа деталей в единицу времени.
Для сравнительной характеристики технического уровня станков и его оборудования используют набор показателей таких как: производительность, надежность, эффективность, удобство в обслуживании.
Свойство станка обеспечивать бесперебойный выпуск годной продукции в заданном количестве в течении определенного срока службы называют надежностью станка. Надежность станка определяется долговечностью и ремонтноспособностью станка.
Точность станка предопределяет в основном точность обработанных на нем изделий. Различают геометрическую точность, кинематическую точность а также жесткость станка.
4. Кинематический расчет привода станка
4.1 Диапазоны регулирования станка
Определяем диапазоны регулирования привода:
Определяем диапазоны регулирования двигателя:
![]()
Определяем диапазоны регулирования двигателя при постоянной мощности:
![]()
Определяем диапазоны регулирования двигателя при постоянном моменте:
![]()
Определяем диапазоны регулирования шпинделя при постоянной мощности:
![]()
Для определения бесступенчатого регулирования частоты вращения шпинделя при постоянной мощности знаменатель ряда передаточных отношений передач коробки скоростей φ1 принимаем равным RдР.
Требуемое число ступеней коробки скоростей:
![]()
Принимаю Z=2
При постоянной мощности диапазон регулирования шпинделя:
![]() .
.
Минимальная частота вращения при постоянной мощности:
![]()
4.2 Разработка и построение структурных сеток и графиков чисел оборотов
По заданному числу z=2 определяем возможные типы схем сложенных структур , т.к. простые множительные структуры не используем.
Общий вид типовой структуры главного привода станка на рис. 4.1
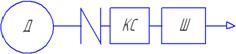
Рисунок 4.1 -Типовая структура главного привода станка.
Структурная сетка коробки скоростей приведена на рис. 4.2
![]()
Рисунок 4.2 - Структурная сетка.
График чисел оборотов приведен на рис.4.3
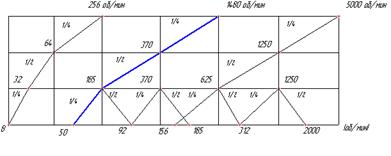
Рисунок 4.3-График чисел оборотов
4.3 Выбор чисел зубьев и определение действительных частот вращения
4.3.1 Подбор чисел зубьев
Для подбора чисел зубьев воспользуемся графиком чисел оборотов (рис.4.3) и значениями передаточных отношений I между звеньями коробки главного движения.
Передаточные отношения:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]()
Подбираем числа зубьев [5,стр.121,табл.3]:
z1 = 16; z2 = 64; z3 = 30; z4 = 60; z5 = 40; z6 = 40; z7 = 16; z8 = 64; z9 = 30; z10 = 60;
4.3.2 Расчет погрешностей кинематических цепей станка
![]()
![]()
 ,
,
![]()

![]()

![]()

![]()

В результате проверки всех основных цепей можно сделать вывод, что числа зубьев колес подобраны правильно и погрешности цепей не превышают допустимую погрешность.
4.3.3 Разработка кинематической схемы привода
На основании графика частот вращения и найденных значений чисел зубьев составляем принципиальную кинематическую схему привода главного движения станка (рис.5.1).
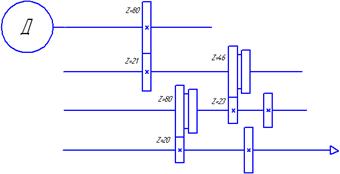
Рисунок 5.1 - Кинематическая схема привода главного движения станка
5. Силовой расчет привода станка
5.1 Расчет коэффициента полезного действия
Определяем эффективную мощность станка затрачиваемую на процесс резания:
![]()
5.2 Мощность холостого хода
Для станков с главным вращательным движением приблизительно можем найти по такой формуле:
![]()
![]()
где dср. – среднее арифметическое в мм. диаметров всех опорных (подшипниковых) шеек валов коробки скоростей станка. dср=30…50мм. dшп. - среднее арифметическое в мм. диаметров всех опорных шеек шпинделя. (70…120мм.). С =2 (для подшипников скольжения); n1, n2, n3 – частоты вращения в мин-1 валов коробки скоростей.
5.3 Расчетный КПД станка
Определяют в зависимости![]() :
:
![]() ;
;
![]()
5.4 Мощность главного двигателя
Мощность главного двигателя определяют по формуле:
![]()
![]()
Из выше перечисленных
расчетов можновыбрать двигатель безступенчатым изменением скоростей. Выбираем
двигатель серии 4П, ближайший по мощности двигатель 4ПФ112S с креплением на фланце, мощностью ![]() кВт, частотой вращения
кВт, частотой вращения ![]() .
. ![]() ;
; ![]() ;
; ![]() ;
; ![]()
5.5 Определение коэффициента полезного действия
![]()
Определение коэффициента полезного действия станка производим позависимости:
![]() ;
;
Где Nдв.ф. – мощность электродвигателя по подобраному каталогу.
КПД станков с главным вращательным движением должен быть не ниже 0,7.
![]()
5.6 Расчет крутящих моментов на валах приводов станков
Мкр.вал = 9740![]() [Н·м];
[Н·м];
где ![]() - номинальная мощность главного
электродвигателя в кВт;
- номинальная мощность главного
электродвигателя в кВт;
![]() - кпд механизма от вала
электродвигателя до рассматриваемого вала;
- кпд механизма от вала
электродвигателя до рассматриваемого вала;
![]() -расчетная частота вращения вала в
мин-1;
-расчетная частота вращения вала в
мин-1;
Mkp.1 = 9750· Н·м;
Н·м;
M’kp.2 = 9750·![]() Н·м;
Н·м;
M’’kp.3 = 9750· Н·м;
Н·м;
M’kp.4= 9750·![]() Н·м;
Н·м;
6. Прочностной расчет основных элементов коробки скоростей
6.1 Расчет на прочность зубчатых колес
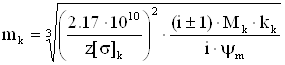
Рассчитываем модуль зубчатой передачи не только по напряжениям изгиба, но и по контактным напряжениям; из двух величин выбираем большую и приводим к стандартному значению:
6.1.1 Расчет первой передачи
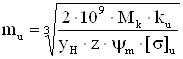 , мм.
, мм.
 , мм.
, мм.
где ![]() - расчетами крутящий момент на валу
шестерни (меньшего колеса) передачи в н м,
- расчетами крутящий момент на валу
шестерни (меньшего колеса) передачи в н м,
z - число зубьев шестерни;
i - передаточное число, равное отношению
числа зубьев большего колеса к числу зубьев меньшего колеса (![]() ), независимо от того,
понижающей передача или повышающая;
), независимо от того,
понижающей передача или повышающая;
![]() - знак плюс для подач наружного зацепления, минус внутреннего;
- знак плюс для подач наружного зацепления, минус внутреннего;
![]() - коэффициент
формы зуба, для z=20
- коэффициент
формы зуба, для z=20 ![]() =0,4
=0,4
![]() ,
,
b - рабочая ширина зубчатого венца колеса в мм;
![]() - коэффициенты, учитывающие увеличение
нагрузки на передачу по сравнению с номинальной вследствие неравномерного
характера процесса резания в работы привода;
- коэффициенты, учитывающие увеличение
нагрузки на передачу по сравнению с номинальной вследствие неравномерного
характера процесса резания в работы привода;
![]()
![]()
где ![]() ‑ коэффициент перегрузки,
‑ коэффициент перегрузки, ![]() =1,4;
=1,4;
![]() ,
,![]() ‑
коэффициенты динамичности нагрузки, из-за изготовления и монтажа
‑
коэффициенты динамичности нагрузки, из-за изготовления и монтажа
При ![]() и
и
![]() ;
;![]() =1,35;
=1,35; ![]() =1,23;
=1,23;
![]() коэффициенты неравномерности
распределения нагрузки по длине зуба;
коэффициенты неравномерности
распределения нагрузки по длине зуба;
для ![]()
![]() ;
;
![]() - допускаемое напряжение на изгиб и
контактную прочность в
- допускаемое напряжение на изгиб и
контактную прочность в ![]() определяются по
формулам:
определяются по
формулам:
![]() =2,9·108·0,9·1,3=3,4·108
Па,
=2,9·108·0,9·1,3=3,4·108
Па,
![]() =11·108·0,71=7,8·108 Па.
=11·108·0,71=7,8·108 Па.
![]() ‑ длительные пределы
выносливости зубьев при расчете на изгиб и контактную прочность в
‑ длительные пределы
выносливости зубьев при расчете на изгиб и контактную прочность в ![]()
![]() ‑ коэффициент, учитывающий
влияние режима шлифования зубьев на величину допускаемого изгибного напряжения,
‑ коэффициент, учитывающий
влияние режима шлифования зубьев на величину допускаемого изгибного напряжения,
![]() =0,9;
=0,9;
![]() ‑ коэффициенты переменности
режима работы,
‑ коэффициенты переменности
режима работы,
 ,
,
где ![]() - расчетное (базовое) число циклов
нагружения при испытании материала шестерни на усталостную прочность,
- расчетное (базовое) число циклов
нагружения при испытании материала шестерни на усталостную прочность, ![]() =1,2·108
=1,2·108
![]() - количество
передач в группе,
- количество
передач в группе, ![]() =2
=2
![]() - расчетная частота вращения шестерни в мин-1;
- расчетная частота вращения шестерни в мин-1; ![]() =370об./мин,
=370об./мин,
![]() ‑ коэффициенты увеличения
‑ коэффициенты увеличения ![]() и
и ![]() , зависящие от степени
универсальности станка в расположения передачи (ближе к выходному валу).
, зависящие от степени
универсальности станка в расположения передачи (ближе к выходному валу).
![]() ;
;
![]() ;
;
![]() ;
;
![]() ,
,
таким образом
 мм,
мм,

Принимаем по стандартному ряду m=2,5мм.
6.1.2 Расчет второй передачи
![]() - коэффициент
формы зуба, для z=23
- коэффициент
формы зуба, для z=23 ![]() =0,4
=0,4
![]() ,
,
b - рабочая ширина зубчатого венца колеса в мм;
Принимаем ![]() ;
;
![]() - коэффициенты, учитывающие увеличение
нагрузки на передачу по сравнению с номинальной вследствие неравномерного
характера процесса резания в работы привода;
- коэффициенты, учитывающие увеличение
нагрузки на передачу по сравнению с номинальной вследствие неравномерного
характера процесса резания в работы привода;
![]() ;
;
![]() ;
;
где ![]() ‑ коэффициент перегрузки,
‑ коэффициент перегрузки, ![]() =1,4;
=1,4;
![]() ,
,![]() ‑
коэффициенты динамичности нагрузки, из-за изготовления и монтажа
‑
коэффициенты динамичности нагрузки, из-за изготовления и монтажа
При ![]() и
и
![]() ;
;![]() =1,15;
=1,15; ![]() =1,1;
=1,1;
![]() коэффициенты неравномерности
распределения нагрузки по длине зуба;
коэффициенты неравномерности
распределения нагрузки по длине зуба;
для ![]()
![]() ;
;
![]() - допускаемое напряжение на изгиб и
контактную прочность в
- допускаемое напряжение на изгиб и
контактную прочность в ![]() определяются по
формулам:
определяются по
формулам:
![]() =2,9·108·0,9·1,3=3,4·108
Па,
=2,9·108·0,9·1,3=3,4·108
Па,
![]() =11·108·0,98=10,8·108
Па.
=11·108·0,98=10,8·108
Па.
![]() ‑ длительные пределы
выносливости зубьев при расчете на изгиб и контактную прочность в
‑ длительные пределы
выносливости зубьев при расчете на изгиб и контактную прочность в ![]()
![]() ‑ коэффициент, учитывающий
влияние режима шлифования зубьев на величину допускаемого изгибного напряжения,
‑ коэффициент, учитывающий
влияние режима шлифования зубьев на величину допускаемого изгибного напряжения,
![]() =0,9;
=0,9;
![]() ‑ коэффициенты переменности
режима работы,
‑ коэффициенты переменности
режима работы,
 ,
,
где ![]() - расчетное (базовое) число циклов
нагружения при испытании материала шестерни на усталостную прочность,
- расчетное (базовое) число циклов
нагружения при испытании материала шестерни на усталостную прочность, ![]() =1,2·108
=1,2·108
![]() - количество
передач в группе,
- количество
передач в группе, ![]() =2
=2
![]() - расчетная частота вращения шестерни в мин-1;
- расчетная частота вращения шестерни в мин-1; ![]() =185об./мин,
=185об./мин,
![]() ‑ коэффициенты увеличения
‑ коэффициенты увеличения ![]() и
и ![]() , зависящие от степени
универсальности станка в расположения передачи (ближе к выходному валу).
, зависящие от степени
универсальности станка в расположения передачи (ближе к выходному валу).
![]() ;
;
![]() ;
;
![]() ;
;
![]() ,
,
таким образом
 мм,
мм,

Принимаем по стандартному ряду m=3мм.
6.1.3 Расчет третьей передачи
![]() - коэффициент
формы зуба, для z=20
- коэффициент
формы зуба, для z=20 ![]() =0,4
=0,4
![]() ,
,
b - рабочая ширина зубчатого венца колеса в мм;
Принимаем ![]() ;
;
![]() - коэффициенты, учитывающие увеличение
нагрузки на передачу по сравнению с номинальной вследствие неравномерного
характера процесса резания в работы привода;
- коэффициенты, учитывающие увеличение
нагрузки на передачу по сравнению с номинальной вследствие неравномерного
характера процесса резания в работы привода;
![]() ;
;
![]() ;
;
где ![]() ‑ коэффициент перегрузки,
‑ коэффициент перегрузки, ![]() =1,4;
=1,4;
![]() ,
,![]() ‑
коэффициенты динамичности нагрузки, из-за изготовления и монтажа
‑
коэффициенты динамичности нагрузки, из-за изготовления и монтажа
При ![]()
![]() ;
;![]() =1,35;
=1,35; ![]() =1,23;
=1,23;
![]() коэффициенты неравномерности
распределения нагрузки по длине зуба;
коэффициенты неравномерности
распределения нагрузки по длине зуба;
для ![]()
![]() ;
;
![]() - допускаемое напряжение на изгиб и
контактную прочность в
- допускаемое напряжение на изгиб и
контактную прочность в ![]() определяются по
формулам:
определяются по
формулам:
![]() =2,9·108·0,9·1,3=3,4·108
Па,
=2,9·108·0,9·1,3=3,4·108
Па,
![]() =11·108·0,98=10,8·108
Па.
=11·108·0,98=10,8·108
Па.
![]() ‑ длительные пределы
выносливости зубьев при расчете на изгиб и контактную прочность в
‑ длительные пределы
выносливости зубьев при расчете на изгиб и контактную прочность в ![]()
![]() ‑ коэффициент, учитывающий
влияние режима шлифования зубьев на величину допускаемого изгибного напряжения,
‑ коэффициент, учитывающий
влияние режима шлифования зубьев на величину допускаемого изгибного напряжения,
![]() =0,9;
=0,9;
![]() ‑ коэффициенты переменности
режима работы,
‑ коэффициенты переменности
режима работы,
 ,
,
где ![]() - расчетное (базовое) число циклов
нагружения при испытании материала шестерни на усталостную прочность,
- расчетное (базовое) число циклов
нагружения при испытании материала шестерни на усталостную прочность, ![]() =1,2·108
=1,2·108
![]() - количество
передач в группе,
- количество
передач в группе, ![]() =3
=3
![]() - расчетная частота вращения шестерни в мин-1;
- расчетная частота вращения шестерни в мин-1; ![]() =50об./мин,
=50об./мин,
![]() ‑ коэффициенты увеличения
‑ коэффициенты увеличения ![]() и
и ![]() , зависящие от степени
универсальности станка в расположения передачи (ближе к выходному валу).
, зависящие от степени
универсальности станка в расположения передачи (ближе к выходному валу).
![]() ;
;
![]() ;
;
![]() ;
;
![]() ,
,
таким образом
 мм,
мм,

Принимаем по стандартному ряду m=4мм.
6.2 Расчет геометрических параметров зубчатых колес
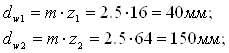
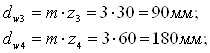
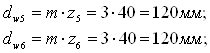
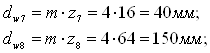
Диаметры делительных окружностей определяются по зависимости:
![]() ;
;
Диаметры окружностей вершин определяются по зависимости:
![]() ;
;
Диаметры окружностей впадин определяются по зависимости:
![]() ;
;
Определяем межцентровые расстояния между валами по формуле:
![]() ;
;
Определяем ширину зубчатых венцов по зависимости:
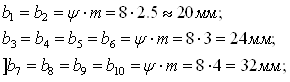

![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]()
![]() ;
;
![]()
 [м];
[м];
![]() = 30 Мпа (для стали 40)
= 30 Мпа (для стали 40)

принимаем d=20 мм,

принимаем d=30 мм,

принимаем d=40 мм,

принимаем d=60 мм,
6.4 Уточненный (проверочный) расчет валов
Для наглядности изобразим схему зацепления, на которой покажем все силы, действующие на валы.
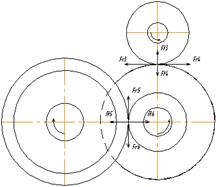
Рисунок 6.1 –Схема сил действующих на валы.
Окружные силы:
![]()
 ;
;
![]() ;
;
Радиальная сила:
![]()
![]() ,
,
![]()
![]()
![]()
![]()
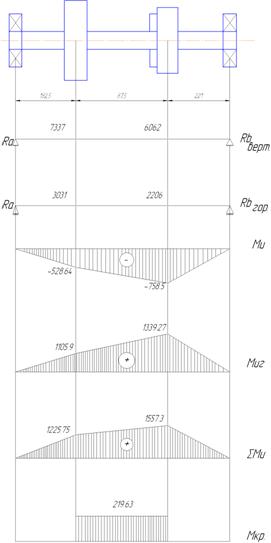
Рис. 6.2.-Эпюры изгибающих и крутящих моментов.
гор.:
∑ У=0:
Ra+Rв-7337-6062=0,
∑Ma=0: 7337∙182,5+6062∙(182,5+87,5)-Rв∙491=0,
Rв=7040Н,
Rа=6359Н,
верт.:
∑ У=0:
Ra+Rв-3031,1-2206=0,
∑Ma=0:
3031,1∙182,5+2206∙(182,5+87,5)-Rв∙491=0,
Rв=3466Н,
Rа=1771,1Н.
Расчет валов на прочность производят по формуле:
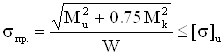 Н/м2
Н/м2
где ![]() ‑ приведенное напряжение (изгиб плюс
кручение) в Па;
‑ приведенное напряжение (изгиб плюс
кручение) в Па;
![]() ‑ расчетный крутящий момент на валу в
Н·м;
‑ расчетный крутящий момент на валу в
Н·м;
![]() ‑ наибольший изгибающий момент в
опасном сечении вала (шпинделя) в Н·м:
‑ наибольший изгибающий момент в
опасном сечении вала (шпинделя) в Н·м:
![]()
где ![]() - максимальные изгибающие моменты в
опасном сечении в Н·м,
- максимальные изгибающие моменты в
опасном сечении в Н·м,
![]() ,
,
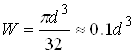
![]() - момент сопротивления изгибу в опасном
сечении в м3;
- момент сопротивления изгибу в опасном
сечении в м3;
 ,
,
![]() ‑
допускаемое напряжение на изгиб в Н/м2,
‑
допускаемое напряжение на изгиб в Н/м2,
Принимаем для валов сталь
35 нормализованную с ![]() .
.
 .
.
7. Выбор и расчет шпоночных соединений
7.1 Выбор шпоночных и шлицевых соединений
1) Шпоночное соединение колеса с валом.
Шпонка ![]() ГОСТ 23360-78
ГОСТ 23360-78 ![]()
2) Шпоночное соединение колеса с валом.
Шпонка ![]() ГОСТ 23360-78
ГОСТ 23360-78 ![]()
Второй вал
1)Шпоночное соединение, колеса с валом.
Шпонка ![]()
![]() ГОСТ
23360-78
ГОСТ
23360-78 ![]()
2) Шпоночное соединение муфты с валом.
Шпонка ![]()
![]() ГОСТ
23360-78
ГОСТ
23360-78 ![]()
Третий вал
1) Шпоночное соединение муфты с валом.
Шпонка ![]()
![]() ГОСТ
23360-78
ГОСТ
23360-78 ![]()
2) Шпоночное соединение муфты с валом.
Шпонка ![]()
![]() ГОСТ
23360-78
ГОСТ
23360-78 ![]()
7.2 Расчет шпоночного соединения
Выбранная шпонка проверяется на смятие, по формуле:
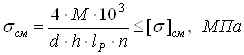
где ![]() – вращательный момент,
передаваемый шпонкой;
– вращательный момент,
передаваемый шпонкой;
![]() – диаметр вала;
– диаметр вала;
![]() – высота шпонки;
– высота шпонки;
![]() – рабочая длина шпонки,
– рабочая длина шпонки, ![]() ;
;
![]() – количество шпонок;
– количество шпонок;
![]() – допускаемое напряжение смятия,
– допускаемое напряжение смятия, ![]() .
.
Пример: Шпонка ![]()
![]() ГОСТ
23360-78
ГОСТ
23360-78 ![]()
![]()
![]()
8. Выбор и расчет подшипников
8.1 Выбор подшипников
Подшипники выбираем, пользуясь справочником [9].
Первый вал
Радиальный шариковый подшипник ГОСТ 8338 – 75.
303: ![]()
Второй вал
Радиальный шариковый подшипник ГОСТ 27365 – 87.
305: ![]()
Третий вал
Радиальный шариковый подшипник ГОСТ 8338 – 75.
307: ![]()
Четвертый вал
Радиальный шариковый подшипник ГОСТ 8338 – 75.
311: ![]()
8.2 Проверочный расчет подшипников расчетного вала
Основным расчетным параметром, который определяет работоспособность подшипниковой опоры, является долговечность подшипника, определяемая по формуле [8]:
где ![]() – динамическая
грузоподъемность;
– динамическая
грузоподъемность;
![]() – коэффициент формы тела качения,
– коэффициент формы тела качения, ![]() ;
;
![]() – частота вращения подвижного кольца;
– частота вращения подвижного кольца;
![]() – приведенная нагрузка,
– приведенная нагрузка,
![]()
![]() – коэффициент кольца,
– коэффициент кольца, ![]() ;
;
![]() – коэффициент безопасности, из
таблицы 8.1 [8]
– коэффициент безопасности, из
таблицы 8.1 [8] ![]() ;
;
![]() – коэффициент температурного режима,
из таблицы 8.2 [8]
– коэффициент температурного режима,
из таблицы 8.2 [8] ![]() ;
;
![]() ,
, ![]() –
коэффициент приведения(
–
коэффициент приведения(![]() ,
, ![]() );
);
![]() – радиальная и осевая нагрузка на
подшипники:
– радиальная и осевая нагрузка на
подшипники:
![]() ,
, ![]() –
с.м. пункт 6.2;
–
с.м. пункт 6.2;
![]()
![]()
![]()
![]()
Для проверки правильности выбора подшипника, необходимо чтобы выполнялось условие
![]()
Опора А: ![]()
Опора В: ![]()
Выбранный подшипник удовлетворяет условию.
9. Выбор ирасчет муфт
9.1 Выбор и расчет электромагнитных муфт
При выборе, муфта должна удовлетворять пяти условиям:
1. Номинальный
передаваемый момент муфты ![]() должен
быть больше максимального приведенного к ней статического момента нагрузки
должен
быть больше максимального приведенного к ней статического момента нагрузки ![]() :
:
![]() ,
,
где ![]() – коэффициент запаса,
– коэффициент запаса, ![]() .
.
![]() Нм;
Нм; ![]() Нм;
Нм;
![]() ,
, ![]() .
.
2. Вращающий момент муфты
![]() должен быть больше
максимального приведенного к муфте момента трогания механизма
должен быть больше
максимального приведенного к муфте момента трогания механизма ![]() , т.е.
, т.е. ![]() .
.
3. Муфта должна
обеспечивать заданные для механизма длительность разгона ![]() , торможения
, торможения ![]() и реверса
и реверса ![]() .
.
![]() ,
,
![]() ,
,
![]() ,
,
где ![]() – приведенный момент
инерции,
– приведенный момент
инерции, ![]() ;
;
![]() – частоты вращения,
– частоты вращения, ![]() ;
;
![]() – моменты вращения и сопротивления
движения,
– моменты вращения и сопротивления
движения, ![]() .
.
4. Остаточный
передаваемый момент: ![]() должен быть
меньше приведенного к валу муфты минимального момента сопротивления механизма
должен быть
меньше приведенного к валу муфты минимального момента сопротивления механизма ![]() при движении на холостом
ходу, т.е.
при движении на холостом
ходу, т.е. ![]() , где
, где ![]() .
.
5. Средняя мощность
потерь ![]() должны быть меньше
мощности допустимых потерь
должны быть меньше
мощности допустимых потерь ![]() для
выбираемой муфты.
для
выбираемой муфты.
![]() ,
,
где ![]() – потери на трение;
– потери на трение; ![]() – потери холостого хода;
– потери холостого хода; ![]() – относительная
продолжительность включения муфты, %;
– относительная
продолжительность включения муфты, %; ![]() –
джоулевы потери в обмотке муфты.
–
джоулевы потери в обмотке муфты.
Потери на трение при разгоне
![]() ,
,
где ![]() – число включений муфты в
течение часа.
– число включений муфты в
течение часа.
Потери на трение при торможении
![]()
Потери на трение при реверсе
![]() .
.
Потери холостого хода
![]() ,
,
где ![]() – относительная частота
вращения дисков при отключенной муфте.
– относительная частота
вращения дисков при отключенной муфте.
10. Разработка системы управления
Для управления коробкой скоростей станка с ЧПУ применяются контактные электромагнитные муфты ЭМ…2 и бесконтактные электромагнитные муфты ЭМ…4. Применение таких муфт позволяет осуществлять переключение передач во время работы станка, как в холостом режиме работы, так и под нагрузкой [3]. Для питания электромагнитных муфт обычно применяются селеновые выпрямители. На рисунке 8 показана система питания группы электромагнитных муфт. Муфты включают и отключают по посредством управляющих контактов УК1, УК2 и т. д. При отключении муфты исчезающее магнитное поле наводит в её катушке э. д. с. Большой величины. Она может вызвать пробой изоляции катушки. Чтобы понизить э. д. с. нужно замедлить уменьшение магнитного поля. Это достигается применением резисторов R1, R2. Э. д. с. самоиндукции направлена в сторону убывающего тока; под ее действием по замкнутому через резистор контуру будет некоторое время протекать затухающий ток, который замедлит изменение магнитного потока и уменьшит величину э. д. с. Часто применяют вентили В1, В2. Они не пропускают тока через разрядные резисторы R1, R2, когда муфты включены, и в это время не будет потерь энергии в резисторах.
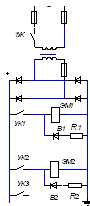
Рис. 10.1 – Схема питания электромагнитных муфт
11. Определение системы смазки
Смазочная система станка служит для подачи смазочного материала ко всем трущимся поверхностям.
Существует несколько схем подвода смазочного материала к трущимся поверхностям.
Индивидуальная схема служит для подвода смазочного материала к одной смазочной точке, централизованная к нескольким точкам. В нераздельной схеме нагнетательное устройство присоединено к смазочной точке постоянно, в раздельной оно подключается только на время подачи смазочного материала. В проточной системе жидкий или пластичный материал используется один раз. В циркуляционной системе жидкий материал подается повторно. В системах дроссельного дозирования объем смазочного материала, подаваемого к смазочной точке, регулируется дросселем. В системах объемного дозирования могут регулироваться не только доза, но и частота подачи. В комбинированных системах могут быть предусмотрены объемное и дроссельное регулирование. Системы с жидким смазочным материалом в зависимости от способа его подачи к поверхностям трения могут быть разбрызгивающими, струйными, капельными, аэрозольными [3].
Для смазки данного станка принимаем комбинированную смазочную систему, которая состоит, из централизованной импульсной системы. Смазочный материал подается к каналам расположенных в нутрии валов под давлением, при этом происходит смазывание подшипников и охлаждение электромагнитных муфт. Смазка зубчатых передач осуществляется аэрозольным методом. Схема импульсной системы приведена на рисунке 9 состоящая из: 1 – указатель уровня смазочного материала; 2 – приемный фильтр; 3 – насос; 4 – фильтр напорной магистрали; 5 – манометр; 6 – смазочный дроссельный блок с ротаметрическими указателями; 7 – реле расхода смазочного материала; 8 – точки смазывания; 9 – указатель потока; 10 – точки смазывания с форсункой; 11 – точки смазывания; 12 – смазочный дроссельный блок; 13 – сливной магнитосетчатый фильтр; 14 – предохранительный клапан;15 – реле уровня; 16 – фильтр; 17 – резервуар.
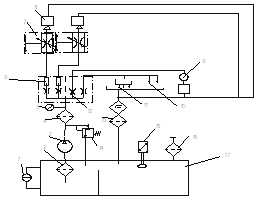
Рис.11.1 – Схема импульсной централизованной смазочной системы
ЗАКЛЮЧЕНИЕ
В результате проделанной работы был произведен расчет коробки скоростей горизонтально-фрезерного станка, выбор и расчет параметров отдельных ее элементов: электромагнитных муфт, обеспечивающих автоматическое переключение передач коробки скоростей; подшипников качения, служащих опорами валов и зубчатых колес; системы смазки и смазочного материала, обеспечивающих непрерывный подвод смазочного материала ко всем механизмам станка. Были разработаны компоновочная схема и чертеж коробки скоростей с указанием его основных элементов.
Выполнен чертеж общего вида горизонтально-фрезерного станка модели 6Р82, где указаны его основные элементы, а также схематически показаны структурная сетка, график частот вращения и кинематическая схема проектируемой коробки скоростей.
СПИСОК ЛИТЕРАТУРЫ
1. Справочник технолога машиностроителя. В 2-х т. Т.2/ Под ред. А.Г. Косиловой и Р.К. Мещерякова. – 4-е изд., перераб. и доп. – М.: Машиностроение, 1985. – 496 с.
2. Методические указания к курсовому проекту по курсу "Металлорежущие станки и промышленные роботы" (для студентов специальности 0501) / Сост.: Ю.А. Сапронов, В.Г. Кочергин, Н.В. Вяльцев, А.Е. Горша. – Донецк: ДПИ, 1987. – 48 с.
3. Кочергин А.И. Конструирование и расчет металлорежущих станков и станочных комплексов. Курсовое проектирование: Учеб. пособие для вузов. – Мин.: Выш. шк., 1991. – 382 с.
4. Методичні вказівки до виконання курсового проекту з деталей машин. "Вибір електродвигуна та визначення вихідних даних для розрахунку приводу" (для студентів напрямку "Інженерна механіка"). / Автори: Оніщенко В.П., Ісадченко В.С., Недосекін В.Б., – Донецьк: ДонНТУ, 2005. – 36 с.
5. Методичні вказівки до виконання курсового проекту з деталей машин. Розділ 2 "Проектування зубчастих черв'ячних передач" (для студентів напрямку "Інженерна механіка"). / Автори: В.П. Блескун, С.Л. Сулійманов.– Донецьк.: ДонНТУ, 2005. – 48 с.
6. Решетов Д.Н. Детали машин: Учебник для студентов машиностроительных и механических специальностей вузов. – 4-е изд., перераб. и доп. – М.: Машиностроение, 1989. – 496 с.
7. Проектирование механических передач: Учебно-справочное пособие для вузов /С.А. Чернавский, Г.А. Снесарев, Б.С. Козинцов и др. – 5-е изд., перераб. и доп. – М.: Машиностроение, 1984. – 560 с.
8. Методичні вказівки до виконання курсового проекту з деталей машин. Розділ 3. Проектування валів та їх опор на подшипниках кочення (для студентів напрямку "Інженерна механіка)/ Автори: О.В. Деркач, О.В. Лукічов, В.Б. Недосєкин, Проскуряков С.В. – Донецьк: ДонНТУ, 2005. - 106 с.
9. Подшипники качения: Справочник/ Под. ред. В.Н. Нарышкина и Р.В. Коросташевского. - М.: Машиностроение, 1984 - 280с.
10. Методичні вказівки до виконання курсового проекту з деталей машин. Конструювання муфт і корпусів (для студентів напрямку "Інженерна механіка") / Сост. : В.С. Ісадченко, П.М. Матеко, В.О. Голдоб.н. – Донецьк: ДонНТУ, 2005. – 40 с.
| Модернизация поперечно-строгального станка с ходом ползуна 700 мм на ... | |
|
Введение Важнейшими условиями увеличения роста промышленной продукции является развитие электрификации, комплексной механизации и автоматизации ... От вала ускорения через зубчатые колеса, звездочку и цепь движение передается на механизм коробки подач, который сообщает ускоренное движение поперечине станка. При этом нужно обеспечить возможность перемещения подвижных зубчатых колес и муфт, размещения механизмов управления, регулирования подшипников, сборки и разборки узла, а также ... |
Раздел: Промышленность, производство Тип: дипломная работа |
| Технология обработки конструкционных материалов | |
|
Конспект лекций "Технология обработки конструкционных материалов" ЛЕКЦИЯ 1 Основы металлургического производства. Производство чугуна Основы ... Главная линия прокатного стана состоит из рабочей клети и линии привода, включающей двигатель, редуктор, шестеренную клеть, муфты, шпиндели. Горизонтальные плоскости фрезеруют на горизонтально-фрезерных станках цилиндрическими фрезами (рис. |
Раздел: Промышленность, производство Тип: учебное пособие |
| Технология выполнения токарных работ | |
|
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ Уральский политехнический колледж Федерального государственного бюджетного образовательного учреждения высшего ... На токарном станке в процессе резания вращение заготовки, закрепляемой в патроне зажимном или в центрах, осуществляется от привода главного движения, обеспечивающего ступенчатое ... В привод главного движения токарного станка могут входить одно- и многоскоростной асинхронный электродвигатель и многоступенчатая коробка скоростей и механический вариатор либо ... |
Раздел: Промышленность, производство Тип: отчет по практике |
| Модернизация привода главного движения станка модели 6С12 | |
|
Министерство образования и науки Украины Донецкий национальный технический университет Факультет Механический Кафедра "Металлорежущие станки и системы ... СТАНОК, ВАЛ, ШПОНКА ПОДШИПНИК, СИСТЕМА СМАЗКИ, ШПИНДЕЛЬ, ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА В результате проделанной работы был произведена модернизация привода главного движения вертикально-фрезерного станка модели 6С12, выбор и расчет параметров отдельных ее элементов ... |
Раздел: Промышленность, производство Тип: курсовая работа |
| Расчет режимов резания при фрезеровании (Методические рекомендации) | |
|
МИНИСТЕРСТВО СЕЛЬСКОГО ХОЗЯЙСТВА И ПРОДОВОЛЬСТВИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ ДЕПАРТАМЕНТ КАДРОВОЙ ПОЛИТИКИ И ОБРАЗОВАНИЯ Московский государственный ... На мощных фрезерных станках при работе торцовыми фрезами глубина резания может достигать 25 мм. Приводом главного движения резания является совокупность механизмов от электродвигателя до шпинделя станка, а его мощность определится исходя из мощности электродвигателя и потерь ... |
Раздел: Рефераты по технологии Тип: реферат |