Реферат: Сейсмические средства охранной сигнализации
Сейсмические средства охранной сигнализации
Москва 2007
1. Основные понятия и определения
В настоящее время при организации охраны территории, наряду с другими типами средств обнаружения, достаточно широко применяются сейсмические средства обнаружения, в которых регистрируются и затем обрабатываются сигналы, возникающие в грунте при пересечении человеком охраняемой зоны. К основным достоинствам ССО относятся отсутствие собственного излучения, возможность полного устранения демаскирующих признаков на охраняемом участке за счет установки линейной части в грунт. Сейсмические средства обнаружения, являясь пассивными средствами охраны, не обнаруживаются электронными средствами разведки. Визуальная скрытость ССО резко снижает вероятность их преодоления даже при осведомленности нарушителя о принципах работы и ТТХ средства. Сейсмические средства удобны для блокирования участков на пересеченной местности и широко применяются в целях охраны протяженных рубежей госграницы и периметров объектов.
В качестве чувствительных элементов, преобразующих сейсмические колебания грунта в электрические сигналы, чаще всего используются сейсмоприемники. Небольшие массогабаритные показатели СП в сочетании с простейшими методами обработки сигналов позволили создать портативные автономные средства блокирования малых участков местности радиусом до 5 м. Такие средства применяются для блокирования подходов к местам временного базирования спецгрупп, для обнаружения групп людей и техники на путях их вероятного передвижения.
К недостаткам ССО в целом, а в особенности тех, которые не используют сложных алгоритмов обработки, относятся низкая помехоустойчивость при заданной вероятности обнаружения в условиях воздействия разнообразных сейсмических помех.
Можно отметить, к примеру, что вероятность ложной тревоги от самолета, пролетающего на высоте 3...4 км, превышает 0,1 для большинства ССО, а в целом ряде случаев интенсивность помех бывает такова, что Р^н может снизиться до 0,5. Обычно ССО имеют среднее время наработки на ложное срабатывание Тлт= 20 ч, на 1-2 порядка уступая средствам обнаружения, имеющим активный принцип действия. Низкая помехоустойчивость ограничивает тактические возможности сейсмических средств, снижает доверие обслуживающего персонала к ССО. Однако, несмотря на это и учитывая вышеупомянутые достоинства ССО, на сегодняшний день сохраняется интерес различных служб охраны, а также разработчиков сигнализационной техники к СО данного типа. Возможности доведения ТТХ ССО до приемлемого уровня реализуются в первую очередь за счет усложнения обработки сигналов от ССО.
Принцип действия сейсмических средств охраны основан на регистрации колебаний, возникающих в грунте при перемещении человека по поверхности земли. Чувствительные элементы, установленные в поверхностном слое грунта на глубине 20...50 см, преобразуют сейсмические колебания в электрические сигналы, поступающие на вход СО. Участок местности, преодоление которого должно быть обнаружено сейсмическим средством, называется зоной обнаружения. ССО можно условно разделить на два класса: для блокирования малых участков местности и для охраны протяженных рубежей. Исходя из особенностей решаемых тактических задач, первые обычно имеют 30 близкую по форме к кругу, радиус которого не превышает 3...5 м. Протяженность зоны обнаружения ССО второго класса находится в пределах от 10 до 100 м, а ширина - от 5 до 20 м. В качестве чувствительных элементов используются точечные ЧЭ - сейсмоприемники и протяженные ЧЭ - трибокабели, эластичные трубы с жидкостью, соединенные с датчиками давления, или волоконно-оптические преобразователи.
Одним из самых распространенных вариантов ССО для протяженных рубежей является вариант, когда точечные чувствительные элементы устанавливаются в один или два ряда, образуя линейную часть сигнализационного средства на охраняемом рубеже.
В связи с тем, что на выходе ЧЭ наряду с полезным сигналом S присутствуют помехи n различного происхождения, задача обнаружения ПС носит вероятностный характер, т.е. всегда есть возможность принять помеху за полезный сигнал с вероятностью Pm или не обнаружить полезный сигнал, замаскированный помехами с вероятностью Р". Обычно в тактико-технических требованиях на сигнализационные средства задают среднее время наработки на ложное срабатывание Tm>100...500 ч и вероятность обнаружения Роб„>0,9...0,97 - Вероятностные характеристики должны сохраняться при воздействии помех от автомобильного транспорта, промышленных предприятий, самолетов, колебаний деревьев и кустарника при ветре и т.п.
В дальнейшем будем говорить о ССО применительно к участкам местности. Использование данного типа СО внутри зданий и помещений существенно затруднено ввиду того, что сооружения представляют собой сложные резонирующие структуры с регулярными и нерегулярными узлами жесткости. К тому же в зданиях, как правило, сосредоточены источники разнообразных помех: электродвигатели лифтов и холодильных установок, двери и т.д. Экспериментальные измерения, проведенные для обнаружителя с ССО в помещениях, показывают, что Тпт в этих условиях составляет не более 10...15 мин. При этом не удается обеспечить надежное обнаружение объекта на всей площади охраняемого помещения.
Определенные ограничения существуют и при использовании ССО в условиях города. Трассы движения городского транспорта с интенсивностью потока более одного автомобиля в секунду допустимы на расстояниях свыше 100 м от 30. По территории охраняемого объекта на расстояниях свыше 20 м от зоны обнаружения возможен проезд автомобилей со скоростью до 40 км/ч. Учитывая редкость одиночных проездов, допустимая вероятность ложной тревоги не превышает 0,05...0,1. Пролет реактивного или винтового самолета возможен на высоте более 1...3 км. Обычно интенсивности полетов одного самолета в час соответствует Рлт<0.002.
ССО предназначены для обнаружения человека, перемещающегося шагом и бегом со скоростью 0,5...6 м/с. Наиболее трудно выполнимо требование по вероятности обнаружения человека, движущегося с минимальной скоростью, поэтому в дальнейшем задача обеспечения надежного обнаружения объекта-нарушителя рассматривается применительно к скорости преодоления человеком 30 равной 0,5 м/с.
При установке сигнализационного средства на охраняемом рубеже желательно иметь визуально маскируемую линейную часть, не нарушать экологию окружающей среды, например, не производить засоления почвы с целью предотвращения ее замерзания и т.п. Непосредственно в зоне обнаружения допускается наличие травы, мелкого кустарника, а на расстоянии свыше 5...10 м от зоны обнаружения - крупных деревьев.
К настоящему времени для охраны объектов, периметров и рубежей разработаны комплексы охранной сигнализации, включающие в свой состав станционную аппаратуру управления и отображения информации, а также определенную номенклатуру средств обнаружения. Вновь создаваемые ССО предназначены для расширения функциональных возможностей этих комплексов, в том числе для охраны объектов, расположенных на территориях с сильно пересеченным рельефом местности, а также для блокирования таких участков, где необходима максимальная маскируемость линейной части средства обнаружения. Большое число ССО, устанавливаемых на одном объекте, приводит к необходимости повышения Тлт до 200...500 ч.
2. Основы теории возбуждения и распространения сейсмических волн
Учитывая сложность обработки сейсмосигналов, познакомимся с основами теории, рассматривающей процессы возбуждения сейсмического сигнала и его прохождения от источника до приемника. Это поможет при рассмотрении углубленного подхода к принципам создания и применения ССО.
Факторами, влияющими на характеристики динамических волн в физических средах и, соответственно, - на параметры принимаемого сигнала, являются:
условия возбуждения колебаний;
фильтрующие свойства реальных физических сред, обусловленные их характеристиками, наличием слоистых и местных неоднородностей;
фильтрующие свойства приемной аппаратуры, включая и свойства колебательной системы "приемник-почва".
Механизм возбуждения сейсмических колебаний человеком. Известно большое количество работ, посвященных различным аспектам естественного передвижения человека. Наиболее детальное исследование динамического воздействия человека на опору проведено НА Берштейном. Используя хроно-циклографический метод, группа исследователей под его руководством определила различные характеристики ходьбы и бега при естественных локомоциях человека. Ходьба человека по горизонтальной поверхности представляет собой непрерывный ряд последовательных приподниманий и опусканий всех частей человеческого тела.
В результате неуравновешенности вертикальных смещений общий центр масс тела испытывает периодические колебания сложной формы. В вертикальной плоскости траектория центра тяжести представляет собой кривую, близкую к синусоиде, обладающую периодом одиночного шага и амплитудой 3,5...6 см. Такие изменения положения центра тяжести определяют значения горизонтальной скорости и величины реакции на опору при движении.
При рассмотрении циклограммы видим, что снижение ОЦМТ совпадает со второй половиной опорного времени, т.е. когда опорная нога находится сзади от ОЦМТ. В этом положении нарушено равновесие, и тело начинает падать вперед. Тем временем другая нога выносится вперед и в некоторый момент создает новую опору. Теперь, за счет своей кинетической энергии, ОЦМТ поднимается вверх. И так процесс повторяется снова.
При подхватывании падающего ОЦМТ передней ногой возникает вертикальное усилие в этой ноге, которое превышает массу тела человека, так как оно должно вызвать затем ускорение тела вверх. Опорная реакция передней ноги направлена по одной прямой с инерционным противодействием ОЦМТ, т.е. вверх и назад.
После переноса тела вперед активно осуществляется второй толчок носком опорной ноги от путевой поверхности. Таким образом, кривая вертикальной составляющей опорной реакции имеет достаточно выраженную двухвершинность.
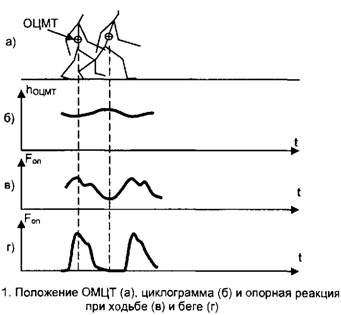
При переходе к бегу двухвершинность графика опорной реакции становится менее выраженной. Амплитуда толчков возрастает, на графике появляется интервал времени, когда отсутствует опорная реакция.
Условия возникновения и распространения сейсмического
сигнала. Определение сейсмического поля в упругом полупространстве при
произвольном, нормальном к поверхности, воздействии относится к решению задачи
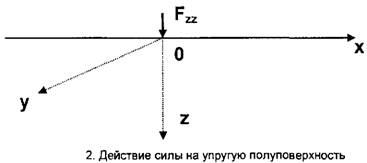
Лэмба. Краткое ее изложение сводится к следующему. На свободной поверхности X,Y полупространства, заполненного
средой с постоянными Ламе![]() и
плотностью среды р, в точке 0 действует нормальная к поверхности сила FZz. Ось Z направлена
внутрь среды. Требуется определить поле смещений внутри и на поверхности
упругой среды.
и
плотностью среды р, в точке 0 действует нормальная к поверхности сила FZz. Ось Z направлена
внутрь среды. Требуется определить поле смещений внутри и на поверхности
упругой среды.
Применяя аппарат комплексных волн, СЛ. Соболев решил эту задачу для смещения в произвольной точке, а решение, в котором используется метод неполного разделения переменных, было получено Г. Петрашенем. Это решение может быть использовано и для слоя, лежащего на упругом полупространстве.
При приеме прямых волн, особое внимание заслуживает
описываемая в поверхностная волна, ослабление амплитуды которой от расстояния г
изменяется как![]() . Этот тип волны
впервые открыл Релей, который показал, что вдоль плоской границы бесконечного
упругого полупространства, на которой отсутствуют напряжения, могут
распространяться плоские гармонические волны, затухающие с глубиной.
. Этот тип волны
впервые открыл Релей, который показал, что вдоль плоской границы бесконечного
упругого полупространства, на которой отсутствуют напряжения, могут
распространяться плоские гармонические волны, затухающие с глубиной.
Релеевская плоская гармоническая волна состоит из двух
неоднородных волн - продольной и поперечной, которые распространяются вдоль
границы полупространства со скоростями: ![]() -
скорость продольной волны;
-
скорость продольной волны; ![]() - скорость
поперечной волны; С - фазовая скорость вдоль оси X. .
- скорость
поперечной волны; С - фазовая скорость вдоль оси X. .
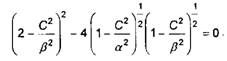
Решение системы уравнений поля смещений частиц упругого полупространства с учетом граничных условий относительно скоростей называется уравнением Релея:
Отношения ![]() и
и ![]() зависят только от
коэффициента Пуассона v, характеризующего параметры
среды:
зависят только от
коэффициента Пуассона v, характеризующего параметры
среды:
![]()
![]()
![]()
![]()
Более подробно описание коэффициентов KR, gR, SR и др., характеризующих среду и параметры распространения сейсмических волн, см. в.
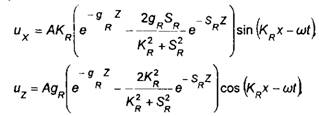
Из видно, что компоненты смещения сдвинуты по фазе на 90°, поэтому траектории частиц в среде представляют из себя эллипсы. Результаты, полученные для плоской гармонической релеевской волны, были обобщены для более общего случая колебаний, в том числе и для многослойного полупространства.
На практике предпринимались попытки приближенно описать распространение поверхностной волны в виде выхода линейного фильтра с коэффициентами, зависящими от расстояния между источником и приемником сейсмических волн. Такое описание для случая сферического источника в упругой среде, позволяет применять достаточно простую физическую интерпретацию результатов и получать законы распространения релеевской волны при любом воздействии.
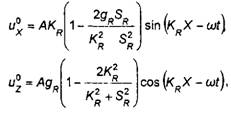
Для амплитуды релеевской волны справедливы следующие приближенные выражения:
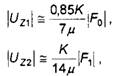
где UZi - амплитуда вертикальных смещений в релеевской волне, возбужденной сосредоточенной нормальной силой F0; - амплитуда вертикальных смещений в релеевской волне, возбужденной сосредоточенной тангенциальной силой F-ь К - коэффициент, зависящий от состава почвы.
График, показывающий изменение амплитуд продольной и поперечной составляющих релеевской волны, приведен на рис 3.

При распространении сейсмических волн в реальных средах, кроме уменьшения амплитуды с увеличением расстояния, происходит еще большее их ослабление, вызванное поглощением сигнала не абсолютно упругой средой.
Явления, которые происходят при поглощении, можно пояснить с помощью теории упругого последействия и теории вязкого трения.
Первая объясняет поглощения тем, что мгновенные значения напряжения определяются не только мгновенным значением деформации, но и ее значениями в предшествующее время. Теория вязкого трения опирается на предположение о наличии вязкого трения между соседними частицами среды, вследствие чего мгновенное значение напряжения дополнительно зависит от скорости деформации.
Затухание плоской гармонической волны в неидеально упругом твердом теле описывается зависимостью
![]()
где Дх - расстояние между точками измерения, у - коэффициент поглощения, а выражение для смещения ur на расстоянии г от источника определяется:
![]()
где и0 - амплитуда смещения вблизи источника. Согласно теории вязкого трения
![]()
где![]() - частота
колебаний; Ь - коэффициент затухания.
- частота
колебаний; Ь - коэффициент затухания.
Теория упругого последействия предсказывает относительно сложный характер связи коэффициентов поглощения с частотой, но в достаточно широкой области частот зависимость близка к линейной:
![]()
где Ь2 - линейный коэффициент затухания.
Математическая модель сейсмического сигнала. Типовые реализации сигналов, возникающих при движении человека через зону обнаружения со скоростью 1 м/с и 4 м/с, приведены на рис.4. Сигналы представляют собой импульсные последовательности. Флюктуации амплитуды импульсов объясняются наличием неровностей рельефа, неоднородностями поверхностного покрова и т.п. Огибающая всей импульсной последовательности определяется скоростью изменения расстояния между точкой воздействия на грунт и местом установки сейсмоприемника.
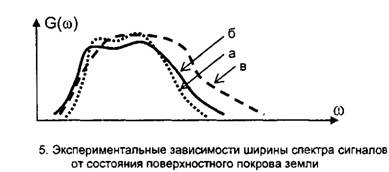
На рис.5 приведены мгновенные спектры сигналов при движении человека со скоростью 0,5 м/с на расстоянии 1 м от СП по дорожке с травяным покровом, по грунтовой дороге с твердым покровом и по асфальтовой дорожке. Ширина спектров сигналов по уровню - 20 дБ составляет соответственно 83 Гц, 92 Гц и 98 Гц, т.е. уменьшается при наличии мягкого поверхностного покрова. Таким образом, экспериментально подтверждается зависимость ширины спектра от состояния поверхностного покрова земли. Мягкая поверхность способствует формированию сигнала со спектром, максимум которого смещается от 50 Гц в низкочастотную область. Однако в большинстве случаев, характерных для охраны объектов, сигнал имеет ширину спектра от 55 до 100 Гц. Наличие отдельных локальных минимумов в спектрах объясняется отражениями сигналов от неоднородностей в грунте и последующим сложением прямого и отраженного сигналов в точке установки СП.

Обобщая результаты анализа процессов, происходящих при формировании сигнала на выходе сейсмоприемника, запишем его выражение для однородного грунта с твердой поверхностью. Полезный сигнал) можно описать выражением
![]()
где N - количество шагов в зоне обнаружения; ![]() - начальная фаза; - функция,
описывающая огибающую пачки импульсов.
- начальная фаза; - функция,
описывающая огибающую пачки импульсов. ![]() Принято
считать, что начальные фазы импульсов cpsi
являются независимыми случайными величинами, имеющими равномерное распределение
от 0 до
Принято
считать, что начальные фазы импульсов cpsi
являются независимыми случайными величинами, имеющими равномерное распределение
от 0 до![]() . Функция
. Функция![]() может быть определена из
анализа спектра сигнала.
может быть определена из
анализа спектра сигнала.
Помехи в ССО.
1-й тип - стационарная помеха во времени и пространстве.
К этому типу помехи следует отнести реализации геосейсмического фона, которые сохраняют свою стационарность в течение периода времени более часа и имеют широкий спектр. Такой тип помехи присутствует всегда, поэтому обнаружить другой тип помехи и полезный сигнал можно лишь при условии, что они отличаются своими статистическими свойствами от помехи 1-го типа. Учитывая, что точность пересекаемого рубежа 300...500 м, можно построить многоканальную систему, состоящую из 40...50 сосредоточенных каналов, по данным из которых во времени и пространстве проверяются гипотезы об однородности выборки из генеральной совокупности. При выборе обрабатывающих алгоритмов обнаружения здесь могут быть полезны как параметрические критерии, так и непараметрические.
Выбор того или другого критерия может быть обоснован статистическими свойствами геосейсмического шума, действующего в данном географическом районе в определенное время суток.
К стационарной во времени и пространстве помехе следует отнести и наличие снежного покрова до 1 м и, промерзание грунта до 1 м. Такой тип помехи действует длительное время и практически однороден по всему пространству. Априори этот тип помехи должен вызывать ослабление сигнала и изменение его спектрального состава. Методы борьбы с помехой типа геосейсмический фон плюс
снежный покров и/или промерзание грунта остаются теми же самыми, что и при действии одиночного геосейсмического шума, но предполагается значительное уменьшение предельной дальности обнаружения.
II - й тип - нестационарная в пространстве и стационарная во времени помеха. К этому типу помех следует отнести помехи, действующие длительное или постоянное время в определенном месте охраняемого рубежа, а именно:
линии электропередачи, расположенные на расстоянии более 100 м от рубежа;
качание ветвей, травы, кустарника и деревьев на рубеже;
волнение моря до 6 баллов и удаление от кромки воды на расстояние более 30 м;
движение железнодорожного электрифицированного транспорта на расстоянии более 500 м от рубежа;
движение колесного автотранспорта;
шум, вызванный жизнедеятельностью населенных пунктов с числом жителей до 10 тыс. и удаленных от рубежа на расстояние более 500 м.
Действие такой помехи может быть либо априори известным, либо обнаружено при сравнении статистических свойств сигналов по времени и пространству ранее перечисленными критериями.
При действии одновременно помех 1-го и 11-го типов значительный интерес представляет определение частотного диапазона действующей помехи, возможность ее ослабления за счет временной фильтрации, а также изучение скоростных параметров волн - помех с целью применения пространственной фильтрации.
Полезным методом борьбы с помехами 11-го типа может явиться компенсационный способ, позволяющий по измеренным внешним параметрам изменить порог обнаружения или непосредственно компенсировать помеху.
III - й тип - нестационарная во времени и стационарная в пространстве помеха. К этому типу следует отнести помехи, действующие на значительной части охраняемого рубежа в течение определенного промежутка времени, а именно:
пролет авиатранспортных средств - как винтомоторных, так и реактивных - на высоте не менее 1000 м над рубежом;
песчано-пылевые бури со скоростью потока до 30 м/с;
осадки в виде дождя интенсивностью до 40 мм/ч;
осадки в виде снега интенсивностью до 10 мм/ч;
раскаты грома;
наводки грозовых разрядов.
Методы обнаружения действия такой помехи основываются на тех же способах, что и при действии помехи ll-го типа, только используемой здесь оценкой будет нестационарность во времени и стационарность в пространстве.
Действие этого типа помех при одновременном действии помех ll-го и 1-го типа может быть ослаблено за счет пространственной и частотной фильтрации, а также действием компенсаторных систем, работающих в нужный момент времени.
IV тип - нестационарная во времени и пространстве помеха. К этому типу можно отнести помехи, действующие в локальном месте охраняемого рубежа и в определенное время, а именно:
перемещения вдоль блокируемого рубежа человека или группы людей со скоростью до 5 км/ч;
пролет вертолетов на высоте не менее 70 м над рубежом;
блуждающие токи земли;
пересечения охраняемого рубежа мелкими и крупными животными.
Этот тип помехи наиболее сходен с полезным сигналом, поэтому при обнаружении действия этого типа помехи при оценке стационарность - нестационарность во времени и пространстве требуется по обнаруженному сигналу определить параметры объекта: скорость, направление движения, массу.
При выделении сигнала при действии помех IV-ro типа полезно использовать следующие три подхода:
многоканальное обнаружение;
методы классификации образов;
таксономическое многоканальное обнаружение.
Первый подход основан на статистических принципах обнаружения детерминированного сигнала с изменяющимся параметром. При работе такого средства обнаружения могут быть получены хорошие результаты при небольшом числе изменяющихся параметров сигнала, известных функциях распределения помехи и линейной зависимости функции сигнала от параметра.
Второй подход в основном использует детерминистские принципы и слабо зашумленную обучающую выборку. Хорошие результаты при этом подходе следует ожидать при неперекрываемости распознаваемых образов.
Третий подход основан на комбинации первых двух. Для его реализации используются как детерминистские, так и статистические принципы. Детерминистский подход основан на поиске "сгустков" реализаций сигналов в гиперпространстве заданных признаков, т.е. на решении задачи таксономии. "Сгустки" точечных реализаций сигнала тесно связаны с совместной плотностью распределения многопараметрического сигнала. Центры выбранных таксонов определяют сигнал, на который должен быть настроен канал, а число таксонов определяет число каналов. Обнаружение в каждом канале осуществляется обычными статистическими методами, например, с помощью корреляционного приема. Это средство обнаружения было опробовано на моделях реальных сигналов и показало практически 100% -е обнаружение при отношении сигнал/шум равном единице.
Таким образом, наиболее вероятный путь решения задачи с применением сосредоточенных приемников - это разделение помех с поэтапным обнаружением и применением интерференционных сейсмических систем.
Система обнаружения такого типа должна включать в себя две подсистемы:
подсистему постоянного слежения;
подсистему детального слежения.
Подсистема постоянного слежения снимает информацию со всего рубежа охраны с разрешением по расстоянию 500...1000 м. В случае появления сигнала, отличного от характеристик сейсмического шума, подсистема постоянного слежения передает "подозреваемый" участок системе детального слежения, которая должна окончательно принять решение о сигнале или помехе. В случае обнаружения помехи П-го и 111-го типа подсистема детального слежения отключается от выбранного участка. Если обнаружена помеха IV-ro типа, то слежение выполняется вначале на этапе отбраковки сигналов вертолетов и животных от людей, а затем, в случае обнаружения человека, идентифицирует объект по координатам местоположения. Подсистема постоянного слежения ведет непрерывное наблюдение за рубежом и должна работать на простых критериях обнаружения. Для приема сигнала эта подсистема должна использовать группы сейсмоприемников для каждого канала с целью увеличения предельной дальности обнаружения.
Одним из возможных вариантов расстановки сейсмоприемников является расстановка вдоль линии охраняемого рубежа через малое расстояние. Сигнал от группы в 20...40 датчиков соответствующим образом суммируется и передается в канал для подсистемы постоянного обнаружения. Для детального обнаружения используется нужная группа из заданного числа датчиков.
Чувствительные элементы ССО.
В качестве чувствительных элементов, предназначенных для преобразования механической энергии сейсмических колебаний в электрический сигнал, могут быть использованы:
точечные чувствительные элементы;
протяженные чувствительные элементы.
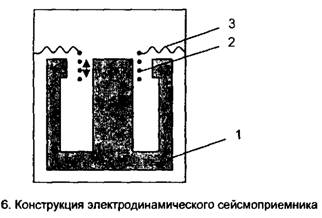
Самым распространенным типом точечного чувствительного элемента является сейсмоприемник электродинамического типа. Такие сейсмоприемники широко используются в геологии при сейсморазведке и выпускаются отечественной промышленностью для этих целей. Конструкция их представляет из себя герметичный корпус, внутри которого находится магнитная система 1.
В зазоре магнитной системы свободно перемещается катушка индуктивности 2, подвешенная на гибких подвесах 3. ЭДС самоиндукции, возникающая при движении катушки, поступает на внешние выводы.
Известны также другие типы точечных чувствительных элементов: пьезоэлектрические, тензометрические и др. Однако в силу различных недостатков они практически не применяются.
В качестве протяженного чувствительного элемента, как правило, используется линия, образованная цепочкой последовательно соединенных электродинамических сейсмоприемников. На выходе такой линии происходит суммирование сигналов от отдельных СП. Типичное количество СП в линии - 10... 20, расстояние между СП - 5...10 м.
Рекомендации по закреплению знаний.
С целью закрепления знаний по данной теме предлагается выполнить лабораторную работу, для чего необходимо изучить названные выше алгоритмы, пользуясь соответствующей литературой. Методика постановки экспериментов с ССО предполагает следующее.
Необходимо выбрать место установки ЧЭ или линейной части, правильно осуществить установку и обеспечить полноту статистики.
ЧЭ следует устанавливать на достаточно плоском участке местности с обеспечением максимально возможной однородности грунта в 30.
При исследовании помехоустойчивости ССО в условиях различных помех должно быть обеспечено наличие источников помех в 30.
Установку ЧЭ или ЛЧ ССО проводят на глубине от 10 до 50 см с обязательным уплотнением грунта вокруг СП для обеспечения хорошей механической связи. Хорошие результаты дает увлажнение грунта. Кроме того, необходимо обеспечить герметичность самого СП и подводящих линий.
Для обеспечения полноты статистики проводят необходимое количество экспериментов в различных условиях, отличающихся:
по характеристикам объекта;
по климато-метеорологическим признакам;
воздействием определенного типа помех.
Количество производимых экспериментов определяется требованиями по вероятности обнаружения при заданной доверительной вероятности.
Для проведения лабораторной работы должны быть предложены реализации полезных и помеховых сигналов, записанные на полигоне, например, в следующих условиях:
сезон - лето, грунт обычной влажности;
объект - человек массой около 60 кг, перемещающийся на расстоянии 2...4 м от СП;
СП - СВ-5;
усилитель - 20 дБ, с границей полосы пропускания 125 Гц;
АЦП - L-202, 12 разрядов;
частота дискретизации - 250 Гц.
При проведении лабораторной работы необходимо будет выполнить следующие этапы:
1. Оценка соотношения сигнал/помеха во входной реализации:
![]()
где Amax - максимальная амплитуда
сигнала; ![]() - диспеосия помехи.
- диспеосия помехи.
2. Вычисление энергетического спектра помехи![]() и сигнала.
и сигнала.
3. Вычисление параметров фильтра![]()
![]()
4. Обработка реализации сигнал плюс помеха.
5. Оценка соотношения сигнал/помеха на выходе фильтра Н: и, соответственно, выигрыша Н^Но при использовании такого фильтра.
Все перечисленные операции должны быть выполнены на ПЭВМ с использованием какого-либо математического пакета, имеющего в своем составе процедуры вычисления статистических характеристик, быстрого преобразования Фурье и реализацию фильтров по заданным характеристикам.
Выводы
1. Сейсмические СО обладают низкой помехоустойчивостью, поэтому используются:
в качестве средств контроля территории;
в составе комбинированных СО;
вне городской черты.
2. Сейсмическое СО является маскируемым.
3. Полезный сигнал в ССО формируется за счет неуравновешенности вертикальных смещений общего центра масс тела человека-нарушителя.
4. Полезный сигнал представляет собой импульсные последовательности.
5. Помехи в ССО делятся на стационарные и нестационарные во времени и пространстве.
6. В качестве чувствительных элементов могут применяться точечные и распределенные датчики.