Реферат: Стабилизаторы напряжения
Учреждение образования
БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
Кафедра систем телекоммуникаций
РЕФЕРАТ
На тему:
«Стабилизаторы напряжения»
МИНСК, 2008
СТ характеризуются следующими
параметрами (рис. 1, а): максимальное (оно же номинальное) выходное напряжение U2 mах , диапазон его регулирования и допустимая
относительная нестабильность ![]() ; максимальный (он же номинальный)
ток IН нагрузки и диапазон его изменений DIН (обычно принимают IН min = 0 и DIН
= IН max , иначе СТ может выйти из строя при холостом
ходе или в моменты включения при индуктивном характере нагрузки); выходное сопротивление
; максимальный (он же номинальный)
ток IН нагрузки и диапазон его изменений DIН (обычно принимают IН min = 0 и DIН
= IН max , иначе СТ может выйти из строя при холостом
ходе или в моменты включения при индуктивном характере нагрузки); выходное сопротивление
![]() ; коэффициент
стабилизации
; коэффициент
стабилизации ![]() коэффициент полезного действия
коэффициент полезного действия ![]() (U1 ном , I1 ном – номинальные входные напряжение и ток). Временной (температурный)
дрейф характеризуют абсолютным либо относительным изменением выходного напряжения
за определенное время (в определенном диапазоне температур).
(U1 ном , I1 ном – номинальные входные напряжение и ток). Временной (температурный)
дрейф характеризуют абсолютным либо относительным изменением выходного напряжения
за определенное время (в определенном диапазоне температур).
|
а
б Рис. 1. Функциональные схемы cтабилизатров напряжения: а – общая; б – параллельного типа |

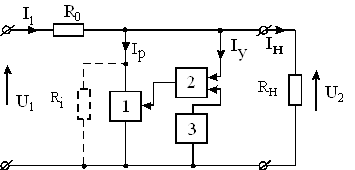
СТ бывают параллельного и
последовательного типов. Параллельный СТ (рис.1, б) содержит регулирующий 1 и опорный
3 элементы, сравнивающий и усилительный элемент 2. В нем при пренебрежении током
через внутреннее сопротивление Ri элемента
1 выполняется условие ![]()
![]() , откуда [4]
, откуда [4]
![]() ,(1)
,(1)
где DIУ , DIР , DIН , DU1 , DU2 – приращения (изменения) соответственно токов сравнивающего, регулирующего элементов и нагрузки, входного и выходного напряжений.
В реальных СТ IУ << IР. С учетом этого при DU1 = DU2 = 0 (неизменное входное и идеальная стабилизация выходного
напряжений) следует DIР
= – DIН , т.е. токи нагрузки и регулирующего элементов
изменяются противоположно. Если же IН = const, то ![]() – изменение тока прямо пропорционально
приращению напряжения U1. Из этого вытекает, что минимальный ток
IР min регулирующего элемента соответствует максимальному току IН max нагрузки и минимальному входному напряжению U1 min . Тогда при
– изменение тока прямо пропорционально
приращению напряжения U1. Из этого вытекает, что минимальный ток
IР min регулирующего элемента соответствует максимальному току IН max нагрузки и минимальному входному напряжению U1 min . Тогда при ![]()
![]()
![]() .
.
Очевидно, IР ном >> IР min, если сопротивление R0 СТ мало. Максимальный ток IР max , по которому подбирают элемент 1, соответствует режиму холостого хода и напряжению U1 max :
![]()
где I1 min = IР min + IН max – минимальный входной ток параллельного СТ.
Полагая DU1 = 0, подставляя ![]() и
и ![]()
![]() , приходим к выражению для выходного
сопротивления СТ
, приходим к выражению для выходного
сопротивления СТ
![]() , (2)
, (2)
где ![]() – так называемое характеристическое
сопротивление, равное выходному сопротивлению активной части СТ (при
– так называемое характеристическое
сопротивление, равное выходному сопротивлению активной части СТ (при ![]() );
);
RУ – суммарное входное сопротивление элемента 2 с учетом элемента 3;
Ki – суммарный коэффициент усиления тока элементов 2 и 1.
Часто ![]() . Тогда
. Тогда ![]() .
.
Подставляя ![]() ,
, ![]() и
и ![]()
![]() , можно получить
, можно получить
 . (3)
. (3)
В большинстве случаев ![]() , поэтому
, поэтому ![]() , т.е. для увеличения
коэффициента стабилизации надо уменьшать характеристическое сопротивление. Это же
необходимо для снижения выходного сопротивления. Требуемое достигают повышением
коэффициента Ki усиления.
, т.е. для увеличения
коэффициента стабилизации надо уменьшать характеристическое сопротивление. Это же
необходимо для снижения выходного сопротивления. Требуемое достигают повышением
коэффициента Ki усиления.
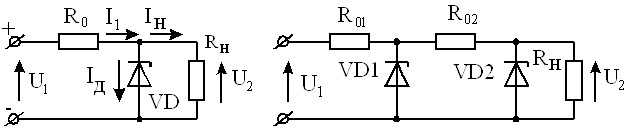
На практике часто применяют
простейший параллельный СТ напряжения, называемый параметрическим (рис. 2, а). Стабилитрон
VD совмещает функции опорного и регулирующего
элементов. Колебания напряжения U1
или тока IН приводят к изменению тока Iд = Iст
, но напряжение U2 = Uст изменяется незначительно: Uст » const. Поэтому DU1 = DUR0
и ![]() , где DU1 , DUR0 , DIст – изменения соответственно напряжений
U1, UR0
и тока Iст стабилитрона; R0 – балластное сопротивление (рис. 2, в).
, где DU1 , DUR0 , DIст – изменения соответственно напряжений
U1, UR0
и тока Iст стабилитрона; R0 – балластное сопротивление (рис. 2, в).
|
а б |
|
в Рис. 2. Параметрические стабилизаторы напряжения: а, б – схемы; в – характеристики |

Для рассматриваемого диодного СТ справедливы соотношения (1 – 2) при Ki = 0 и
![]()
![]() ,
,
где rд – дифференциальное сопротивление стабилитрона, который
подбирают исходя из значений напряжения U2 и тока IН
. Очевидно, при Ki = 0 ![]() = rд, т.е. в диодных СТ характеристическое сопротивление является
величиной заданной. Соответственно
= rд, т.е. в диодных СТ характеристическое сопротивление является
величиной заданной. Соответственно ![]() и
и ![]() . Ток Iст min выбирают в пределах 2…3 мА для маломощных и 3…5 мА для мощных
стабилитронов. Сопротивление rд
, зависящее от тока
Iст , принимают равным номинальному (среднему)
значению. Исходя из допустимого тока Iст доп оценивают
максимальный ток нагрузки.
. Ток Iст min выбирают в пределах 2…3 мА для маломощных и 3…5 мА для мощных
стабилитронов. Сопротивление rд
, зависящее от тока
Iст , принимают равным номинальному (среднему)
значению. Исходя из допустимого тока Iст доп оценивают
максимальный ток нагрузки.
Диодные СТ просты и надежны, но их недостатками являются невозможность регулировки выходного напряжения и невысокий коэффициент стабилизации (порядка 15…50), особенно при больших токах нагрузки IН > Iст ном . Возможный способ увеличения параметра K – применение каскадных схем (рис. 2, б). Расчет такого СТ выполняется “справа налево”. Выходное сопротивление определяется стабилитроном VD2. Диодные СТ применяются в основном в качестве источников опорного напряжения в более мощных СТ и для питания слаботочных схем, например, цепей смещения. В этом случае удается обеспечить условие IН max £ Iст min , при котором стабильность может быть приемлемой. Температурный и временной дрейф параметрического СТ такой же, как у отдельного стабилитрона. В широком интервале температур дрейф напряжения U2 доходит до 10% и более, т.е. намного превышает нестабильность напряжения U1 и тока IН . Анализ показывает, что однокаскадный параллельный СТ (содержит однокаскадный регулирующий элемент) не имеет преимуществ перед диодным, а двухкаскадный (с двухкаскадным регулирующим элементом) уступает двухкаскадному последовательному СТ.
Последовательный СТ (рис.3)
напряжения содержит регулирующий 1 и опорный 3 элементы, сравнивающий и усилительный
элемент 2. В нем выполняется условие ![]() (Ri – внутреннее сопротивление элемента 1), откуда для приращений
(Ri – внутреннее сопротивление элемента 1), откуда для приращений
![]() . (4)
. (4)
|
Рис. 3. Функциональная схема стабилизатора напряжения последовательного типа |

В реальных СТ IУ << IН . С учетом этого при DU1 = DU2 = 0 следует DIР = DIН , т.е. ток регулирующего элемента повторяет
изменение тока нагрузки. Если же IН
= const, то ![]()
![]() – изменение тока элемента 1 противоположно
изменению тока через сопротивление Ri, которым принципиально нельзя пренебрегать. Из этого следует,
что в последовательном СТ максимальный ток IР max регулирующего элемента соответствует максимальному току IН max нагрузки и минимальному входному напряжению U1 min.:
– изменение тока элемента 1 противоположно
изменению тока через сопротивление Ri, которым принципиально нельзя пренебрегать. Из этого следует,
что в последовательном СТ максимальный ток IР max регулирующего элемента соответствует максимальному току IН max нагрузки и минимальному входному напряжению U1 min.: ![]()
![]() (часто с запасом принимают
(часто с запасом принимают ![]() ). Последовательный
СТ не может работать в режиме холостого хода (в этом случае IР < 0). Для нормального функционирования через элемент
1 должен протекать минимальный (остаточный) ток
). Последовательный
СТ не может работать в режиме холостого хода (в этом случае IР < 0). Для нормального функционирования через элемент
1 должен протекать минимальный (остаточный) ток ![]()
![]() . Ток IН min обеспечивают подключением на выходе постоянного сопротивления (шунта). Тогда
по отношению к внешней нагрузке холостой ход допустим, но под током IН max надо понимать сумму токов собственно нагрузки и шунта IШ = IН
min . В рабочем режиме напряжение на регулирующем
элементе UР = U1 – U2
. Но в момент включения
(с учетом емкости на выходе) и при коротком замыкании UР = U1 , из-за чего регулирующий элемент выбирают
из условия UР max = U1 max .
. Ток IН min обеспечивают подключением на выходе постоянного сопротивления (шунта). Тогда
по отношению к внешней нагрузке холостой ход допустим, но под током IН max надо понимать сумму токов собственно нагрузки и шунта IШ = IН
min . В рабочем режиме напряжение на регулирующем
элементе UР = U1 – U2
. Но в момент включения
(с учетом емкости на выходе) и при коротком замыкании UР = U1 , из-за чего регулирующий элемент выбирают
из условия UР max = U1 max .
Полагая в (3) DU1 = 0, ![]() и
и ![]() , имеем
, имеем
![]() , (4)
, (4)
где параметры ![]() , RУ , Ki аналогичны параметрам параллельного СТ, а подставляя сюда же
, RУ , Ki аналогичны параметрам параллельного СТ, а подставляя сюда же ![]() и те же DIР и DIУ
, находим коэффициент
стабилизации
и те же DIР и DIУ
, находим коэффициент
стабилизации
 . (5)
. (5)
В последовательных СТ, как
и в параллельных, ![]() . Поэтому
. Поэтому ![]() . Из-за неидеальных свойств
регулирующего элемента
. Из-за неидеальных свойств
регулирующего элемента ![]() , и коэффициент стабилизации имеет
конечное значение.
, и коэффициент стабилизации имеет
конечное значение.
Однокаскадный последовательный СТ и его малосигнальная эквивалентная схема приведены на рис. 4, а, б. Усилительная часть представлена транзистором VT, опорная – стабилитроном VD, стабилизированным напряжением Е0 и балластным сопротивлением R0 . По-существу, СТ представляет собой эмиттерный повторитель, потенциал базы которого стабилизирован, а напряжение коллекторного питания изменяется в широких пределах.
Сравнивая схемы рис. 3 и рис.
4, а, б, устанавливаем: ![]() ,
, ![]() ,
, ![]() ,
, ![]() =
= ![]() , где rЭ , rБ ,
, где rЭ , rБ ,![]() , b – параметры транзистора VT в схеме с ОЭ; rд – дифференциальное сопротивление стабилитрона
VD. Количественные расчеты показывают, что
при средних значениях параметров транзисторов средней мощности
, b – параметры транзистора VT в схеме с ОЭ; rд – дифференциальное сопротивление стабилитрона
VD. Количественные расчеты показывают, что
при средних значениях параметров транзисторов средней мощности ![]() = 5 кОм, rБ = 20 Ом, b = 30, IК = 0,25 А и rд = 10 Ом выходное сопротивление и коэффициент стабилизации примерно
равны 1 Ом и 125 раз. Величина K приемлема, но Rвых сравнительно велико и ограничивает максимальный
ток нагрузки в однокаскадном СТ.
= 5 кОм, rБ = 20 Ом, b = 30, IК = 0,25 А и rд = 10 Ом выходное сопротивление и коэффициент стабилизации примерно
равны 1 Ом и 125 раз. Величина K приемлема, но Rвых сравнительно велико и ограничивает максимальный
ток нагрузки в однокаскадном СТ.
В рассматриваемом СТ напряжение
Е0 предполагалось абсолютно постоянным. На практике диодный СТ питается
от того же источника. Обозначив DЕ0 = h×DU1 (h < 1) и включив этот источник переменного напряжения последовательно
с сопротивлением R0 , можно показать, что коэффициент стабилизации
уменьшается в (1+![]() ) раз. Наиболее часто балластное сопротивление
R0 подключают ко входу СТ напрямую, что резко
снижает значение K. Действительно, в
этом случае изменения выходного и опорного напряжений примерно одинаковы (изменением
напряжения база – эмиттер транзистора VT пренебрегаем).
Поэтому коэффициент стабилизации СТ близок к аналогичному опорной части, который
по причине небольшого значения R0 (100…300 Ом) не превышает 10…20.
) раз. Наиболее часто балластное сопротивление
R0 подключают ко входу СТ напрямую, что резко
снижает значение K. Действительно, в
этом случае изменения выходного и опорного напряжений примерно одинаковы (изменением
напряжения база – эмиттер транзистора VT пренебрегаем).
Поэтому коэффициент стабилизации СТ близок к аналогичному опорной части, который
по причине небольшого значения R0 (100…300 Ом) не превышает 10…20.
Основной недостаток однокаскадного
последовательного СТ – сравнительно большое выходное сопротивление. Лучшие свойства
имеет двухкаскадный СТ (рис. 4, в), в котором транзистор VT1 является регулирующим элементом, а транзистор
VT2 – сравнивающим и усилительным. В этом случае ![]() ,
, ![]()
![]() ,
, ![]() и
и ![]() =
= ![]() , где IК1, b1 – ток коллектора
транзистора VT1 и коэффициент передачи его тока в схеме
с ОЭ; Rвх2 , rБ2 , rЭ2 , b2
– входное сопротивление и параметры транзистора VT2; rд – дифференциальное сопротивление стабилитрона
VD. Например, при IК2 = 10 мА, rБ2 = 50 Ом, b1 = b2 = 30 и rд =10 Ом имеем Rвых » 0,15 Ом. Выигрыш по сравнению с однокаскадной схемой значительный.
Соответственно возрастает и коэффициент стабилизации: K » 1000.
, где IК1, b1 – ток коллектора
транзистора VT1 и коэффициент передачи его тока в схеме
с ОЭ; Rвх2 , rБ2 , rЭ2 , b2
– входное сопротивление и параметры транзистора VT2; rд – дифференциальное сопротивление стабилитрона
VD. Например, при IК2 = 10 мА, rБ2 = 50 Ом, b1 = b2 = 30 и rд =10 Ом имеем Rвых » 0,15 Ом. Выигрыш по сравнению с однокаскадной схемой значительный.
Соответственно возрастает и коэффициент стабилизации: K » 1000.
|

а б

в г
д е Рис. 4. Схемы последовательных стабилизаторов на дискретных элементах |



Обычно минимальный ток стабилитрона
VD превышает ток IБ2 транзистора VT2. Поэтому вводят дополнительное смещение с помощью сопротивления
Rд от ИП напряжением –Ед (показано
пунктиром): ![]() (Iд (IRд) – ток стабилитрона (через сопротивление
Rд)). Для исключения токопроводящей цепи стабилитрон VD включают в цепь эмиттера транзистора VT2, а базу последнего соединяют с выходом СТ (см. рис. 4, в). В
такой схеме транзистор VT2 работает
при низком напряжении коллектор – база UКБ2 = UБЭ1
<< U2, что является дополнительным преимуществом. Недостаток
– повышенное входное сопротивление
(Iд (IRд) – ток стабилитрона (через сопротивление
Rд)). Для исключения токопроводящей цепи стабилитрон VD включают в цепь эмиттера транзистора VT2, а базу последнего соединяют с выходом СТ (см. рис. 4, в). В
такой схеме транзистор VT2 работает
при низком напряжении коллектор – база UКБ2 = UБЭ1
<< U2, что является дополнительным преимуществом. Недостаток
– повышенное входное сопротивление ![]() . Из-за этого возрастает выходное сопротивление
. Из-за этого возрастает выходное сопротивление
![]() , что снижает
коэффициент стабилизации, по сравнению с базовым включением, в три с лишним раза.
, что снижает
коэффициент стабилизации, по сравнению с базовым включением, в три с лишним раза.
Типовые значения параметров двухкаскадных последовательных СТ составляют Rвых = 0,1…0,5 Ом, K = 200…800 и IН = 0,2…0,5 А. В случае бóльших токов (мощностей) и повышенных требований к коэффициенту стабилизации необходимо дальнейшее уменьшение характеристического сопротивления посредством увеличения коэффициента Ki . Это достигается либо использованием многокаскадных усилителей в сравнивающем и усилительном элементе СТ, либо применением в качестве VT1 составного Т, что наиболее часто используют на практике. Выпускаются составные (из двух элементов) Т, специально предназначенные для СТ. В такой схеме сопротивление Rвых может составлять сотые (тысячные) доли ома.
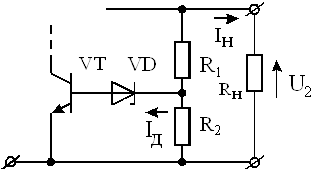
Рассмотренные СТ обеспечивают
выходное напряжение U2 » Uст (Uст – напряжение стабилизации диода VD). На практике часто необходимо иметь отличную от Uд = Uст величину, регулируемую ступенями. Наиболее
распространенный способ повышения U2 представлен
на рис. 4, г. Он пригоден также в параллельных СТ. Полагая UБЭ » 0, имеем ![]() . Для уменьшения параметра RУ сопротивление R2 выбирают малым, так что
. Для уменьшения параметра RУ сопротивление R2 выбирают малым, так что ![]() и
и ![]() . При таком низкоомном делителе, сделав
сопротивления переменными, можно плавно регулировать выходное напряжение.
. При таком низкоомном делителе, сделав
сопротивления переменными, можно плавно регулировать выходное напряжение.
По теореме об эквивалентном
генераторе рассматриваемая схема переходит в схему рис. 4, д, в которой ![]() и
и ![]()
![]() . В отсутствие делителя приращение
входного тока составляет
. В отсутствие делителя приращение
входного тока составляет ![]() , с ним –
, с ним – ![]() , т.е. делитель уменьшает
приращение DIУ при одинаковом изменении DU2. Это равносильно повышению RУ и соответственно
, т.е. делитель уменьшает
приращение DIУ при одинаковом изменении DU2. Это равносильно повышению RУ и соответственно ![]() . Поэтому коэффициент стабилизации
ухудшается:
. Поэтому коэффициент стабилизации
ухудшается:
![]() ,
,
где K0 – коэффициент стабилизации без делителя.
Очевидно, даже в предельном
случае Rдел = 0 СТ с делителем в ![]() раз хуже (
раз хуже (![]()
![]() ). Поэтому при регулировании выходного
напряжения параметры СТ изменяются и оптимальны при U2 = U2 min .
). Поэтому при регулировании выходного
напряжения параметры СТ изменяются и оптимальны при U2 = U2 min .
Для получения малых регулируемых
напряжений применяют схему рис. 4, е, в которой при ![]() через сопротивление R1 протекает заданный ток
через сопротивление R1 протекает заданный ток ![]() . Поэтому, изменяя R1, можно получить как большие, так и малые напряжения U2 (близкие к 0 В). Практически U2 min » UБЭ = 0,7 В.
. Поэтому, изменяя R1, можно получить как большие, так и малые напряжения U2 (близкие к 0 В). Практически U2 min » UБЭ = 0,7 В.
В СТ выходное напряжение равно U2 = Uд + UБЭ (Uд (UБЭ) – напряжение опорного элемента (база – эмиттер Т)) либо пропорционально этой сумме. Поэтому временной и температурный дрейф напряжения U2 определяется изменениями DUд и DUБЭ при неизменных значениях U1 и RН . Временной дрейф параметра Uд практически отсутствует, аналогичный параметра UБЭ является хаотическим и во многом зависит от качества Т. Температурные зависимости Uд = = f1 (Т ) и UБЭ = f2 (Т ) определяются температурным коэффициентом e напряжения. Применительно к стабилитронам e > 0 и возрастает с повышением номинала Uд и ростом тока Iд. Коэффициент e транзисторов является отрицательным при малых токах и уменьшается по модулю при увеличении тока IЭ . Практически положительная составляющая температурного коэффициента превалирует и напряжение U2 возрастает при увеличении температуры, так что его суммарный коэффициент составляет eст = 2…5 мВ/град. Если это неприемлемо, то применяют составной опорный элемент, сочетающий прямое и обратное включение стабилитронов. Он позволяет снизить значение eст до 0,1 мВ/град, но взаимная компенсация присутствует лишь в узком диапазоне тока Iд , что необходимо учитывать.
Выходное сопротивление транзисторных
СТ, особенно многокаскадных, очень мало, но это справедливо для статической величины
Rвых . При скачкообразных изменениях тока IН коэффициент b транзисторов в первый момент равен нулю, соответственно Ki (0) = 0, и начальное выходное сопротивление
Rвых (0) » ![]() (0) » rд
+ rБ + rЭ может на порядок превышать значение Rвых . Восстановление происходит через время, определяемое постоянной
tb времени Т. Для исключения этого выход
СТ шунтируют достаточно большой емкостью С, выбираемой по условию СRвых ср >> tо, где tо – эквивалентная
постоянная времени, равная в первом приближении сумме постоянных tb всех транзисторов СТ;
(0) » rд
+ rБ + rЭ может на порядок превышать значение Rвых . Восстановление происходит через время, определяемое постоянной
tb времени Т. Для исключения этого выход
СТ шунтируют достаточно большой емкостью С, выбираемой по условию СRвых ср >> tо, где tо – эквивалентная
постоянная времени, равная в первом приближении сумме постоянных tb всех транзисторов СТ; ![]()
![]() – усредненное по интервалу переходного
процесса выходное сопротивление. При Rвых ср = 0,1
Ом и tо = 10 мкс необходимое значение С составляет сотни микрофарад.
– усредненное по интервалу переходного
процесса выходное сопротивление. При Rвых ср = 0,1
Ом и tо = 10 мкс необходимое значение С составляет сотни микрофарад.
Коэффициент стабилизации K как функция характеристического сопротивления ![]() – тоже комплексная величина.
Ее модуль уменьшается с повышением частоты пульсаций и скорости изменения напряжения
U1. Но скачкообразные изменения DU1 маловероятны, так как СТ питается от выпрямителя
с фильтром.
– тоже комплексная величина.
Ее модуль уменьшается с повышением частоты пульсаций и скорости изменения напряжения
U1. Но скачкообразные изменения DU1 маловероятны, так как СТ питается от выпрямителя
с фильтром.
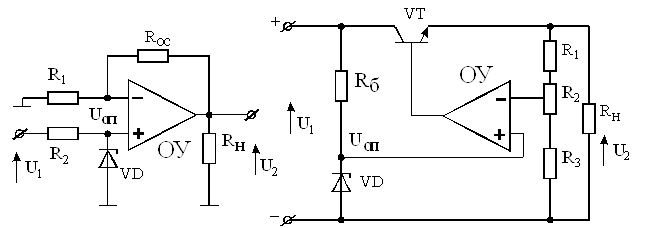
СТ с активным регулирующим
элементом часто называют компенсационным. Большое распространение получили СТ на
операционных усилителях. Простейшая схема такого СТ, используемая при малых токах
нагрузки, приведена на рис. 5, а. Напряжение ![]()
![]() (Kоу – коэффициент усиления с ОС) остается постоянным при изменении
нагрузки. Изменяя сопротивление Rос
, можно регулировать
величину U2. При большом токе IН применяют компенсационный СТ последовательного типа на операционном
усилителе (рис. 5, б). В нем требуемый диапазон регулирования выходного напряжения
выбирается с помощью сопротивлений R1, R2 и R3.
(Kоу – коэффициент усиления с ОС) остается постоянным при изменении
нагрузки. Изменяя сопротивление Rос
, можно регулировать
величину U2. При большом токе IН применяют компенсационный СТ последовательного типа на операционном
усилителе (рис. 5, б). В нем требуемый диапазон регулирования выходного напряжения
выбирается с помощью сопротивлений R1, R2 и R3.
В последнее время выпускаются СТ полностью в интегральном исполнении. Они представляют собой трехполюсники (рис. 5, в, г), конструируются на положитель-ные и отрицательные выходные напряжения величиной 5, 6, 8, 12, 15, 18 и 24 В при токах нагрузки до 3 А. Для увеличения значения IН вместе с ним можно применять проходные Т. Такие СТ называются еще преобразователями постоянного тока в постоянный с высокой фильтрующей способностью (стабилизируют напряжение U2 в пределах 5 мВ).
|
в
г Рис. 5. Построение СТ на интегральных схемах |


|
а б |
В них в качестве источника опорного напряжения помимо стабилитрона применяют Т по схеме с ОБ. Регулирующий элемент представляет составной Т из двух (нескольких) Т. Усилительным элементом является операционный усилитель или (в некоторых случаях) просто дифференциальный каскад. Используется та либо другая форма внутреннего ограничения тока и защита от температурных перегрузок. Отечественной промышленностью выпускаются СТ последовательного типа на гибридных и монолитных интегральных схемах.
Параллельные СТ нечувствительны
к токовым перегрузкам, так как с увеличением тока IН уменьшается ток IР. При значениях
IН >> IН max регулируемый Т запирается.
В случае короткого замыкания на выходе напряжение U1 полностью падает на балластном сопротивлении R0. Последовательные СТ чувствительны к перегрузкам, поскольку
токи IН и IР изменяются одинаково. При значениях IН > IН
max усилительный и опорный элементы заперты,
а регулируемый Т работает с максимальным базовым током IБ, определяемым токоотводящим сопротивлением и разностью напряжений
U1 – U2. Короткое замыкание увеличивает ток IБ, напряжение на Т возрастает в ![]() раз. Это резко повышает
рассеиваемую мощность, и Т выходит из строя. Поэтому последовательные СТ дополняют
защитным реле. При одинаковом значении IН в параллельных СТ необходимы более сильноточные (примерно вдвое)
Т, чем в последовательных. Последние обладают более высоким коэффициентом полезного
действия. Но при решении конкретных задач параллельные СТ могут быть практически
равноценными, а с учетом их нагрузочной способности – даже оптимальным вариантом.
раз. Это резко повышает
рассеиваемую мощность, и Т выходит из строя. Поэтому последовательные СТ дополняют
защитным реле. При одинаковом значении IН в параллельных СТ необходимы более сильноточные (примерно вдвое)
Т, чем в последовательных. Последние обладают более высоким коэффициентом полезного
действия. Но при решении конкретных задач параллельные СТ могут быть практически
равноценными, а с учетом их нагрузочной способности – даже оптимальным вариантом.
ЛИТЕРАТУРА
1. Ильинков В.А., Капуро П.А., Румянцев А.В. Схемотехника устройств и систем телевидения. Ч. 1: Схемная реализация основных преобразований в телевидении: Учебное пособие по курсу “ Схемотехника устройств и систем телевидения” для студентов специальности “Телекоммуникационные системы”: В 2-х ч.– Мн.: БГУИР, 2007.– 126 с.
2. Степаненко И. П. Основы теории транзисторов и транзисторных схем. – 4-е изд., перераб. и доп. – М.: Энергия, 2003. – 608 с.
3. Бытовая радиоэлектронная техника: Энциклопедический справочник/ Под ред. А.П. Ткаченко. – Мн.: Бел. Энциклопедия, 2005. – 832 с.
4. Хохлов Б. Н. Декодирующие устройства цветных телевизоров. – 3-е изд., перераб и доп. – М.: Радио и связь, 2008. – 512 с.