Реферат: Применение гироскопов
ПРИМЕНЕНИЕ ГИРОСКОПОВ
Гироскопом называется массивное тело, быстро вращающееся вокруг одной из своих главных осей инерции. Изменение вектора момента количества движения гироскопа в результате действия на него внешних сил называется прецессией. Точный расчет скорости прецессии сложен. В первом приближении принимают, что ось вращения гироскопа, мгновенная ось вращения и направление вектора момента количества движения совпадают. Поэтому прецессию можно наблюдать, если следить за движением оси гироскопа.
Существуют гироскопы с тремя степенями свободы (оси возможного вращения) ротора гироскопа обеспечиваются двумя рамками карданова подвеса. Если на такое устройство не действуют внешние возмущения, то ось собственного вращения ротора сохраняет постоянное направление в пространстве. Если же на него действует момент внешней силы, стремящийся повернуть ось собственного вращения, то она начинает вращаться не вокруг направления момента, а вокруг оси, перпендикулярной ему (прецессия).
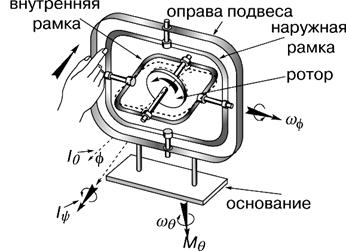 |
Рис. 1. ГИРОСКОП С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ (с двумя рамками карданова подвеса), кинематическая схема. Iy – ось собственного вращения ротора, вдоль которой направлен его кинетический момент; I0 – опорное направление кинетического момента; j – угол отклонения внутренней рамки карданова подвеса; wj – угловая скорость поворота внутренней рамки подвеса (прецессия); Mq – момент возмущающей внешней силы; wq – угловая скорость поворота внешней рамки подвеса (нутация).
В хорошо сбалансированном (астатическом) и достаточно быстро вращающемся гироскопе, установленном на высокосовершенных подшипниках с незначительным трением, момент внешних сил практически отсутствует, так что гироскоп долго сохраняет почти неизменной свою ориентацию в пространстве. Поэтому он может указывать угол поворота основания, на котором закреплен. Именно так французский физик Ж.Фуко (1819–1868) впервые наглядно продемонстрировал вращение Земли. Если же поворот оси гироскопа ограничить пружиной, то при соответствующей установке его, скажем, на летательном аппарате, выполняющем разворот, гироскоп будет деформировать пружину, пока не уравновесится момент внешней силы. В этом случае сила сжатия или растяжения пружины пропорциональна угловой скорости движения летательного аппарата. Таков принцип действия авиационного указателя поворота и многих других гироскопических приборов. Поскольку трение в подшипниках очень мало, для поддержания вращения ротора гироскопа не требуется много энергии. Для приведения его во вращение и для поддержания вращения обычно бывает достаточно маломощного электродвигателя или струи сжатого воздуха.
На рис.1 изображен гироскоп, укрепленный в кардановом подвесе. Наружное кольцо А карданова подвеса может свободно поворачиваться вокруг вертикальной оси аа. Внутреннее кольцо Б связано с кольцом А горизонтальной осью бб. В кольце Б укреплен гироскоп Г, ось вращения которого ев перпендикулярна оси бб. Центр тяжести гироскопа находится на пересечении всех трех осей и при любом повороте колец сохраняет свое положение в пространстве.
Движение гироскопа с закрепленным центром тяжести Описывается уравнением моментов
![]()
где М — момент внешних сил, N — момент количества движения гироскопа. Дальнейшие выкладки поясняются векторной схемой рис. 2; расположение гироскопа и обозначения осей те же, что и на рис. 1.
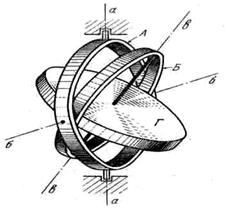
рис.1.
Пусть вначале М =0, а гироскоп вращается с угловой, скоростью , так что N=Jw (J момент инерции гироскопа относительно оси вращения). Если затем к оси гироскопа приложить вертикальную внешнюю силу Р, то возникнет момент сил М, лежащий в горизонтальной плоскости. Обратившись к уравнению (1) и рис. 2 и 3, нетрудно понять, что векторы М и N ортогональны друг другу, а вектор dN направлен так же, как и М, поэтому сила Р, не изменяя величины вектора /V, заставляет его конец описывать окружность в горизонтальной плоскости. За
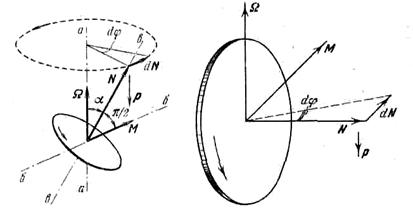
рис.2 рис.3
время dt проекция вектора N на горизонтальную плоскость повернется на угол dj, причем, как следует из (1) и рис. 2,
![]()
где а — угол, который вектор N составляет с вертикалью. Таким образом, угловая скорость Q вращения вектора N равна
![]()
или, в векторной форме,
[W N]=M (2`)
Если ось гироскопа горизонтальна (рис. 3), то вместо .(2) получим
W=M/N (2``)
В быстро вращающемся гироскопе направление вектора момента количества движения приблизительно совпадает с направлением оси самого гироскопа. Поэтому под действием внешнего момента М ось гироскопа тоже начнет вращаться вокруг вертикальной оси с угловой скоростью W, описывая в пространстве конус. Поскольку вектор М поворачивается вместе c N таким образом, что их взаимное расположение не меняется со временем, вращение оси гироскопа при постоянной силе Р оказывается равномерным. Это вращение называется регулярной прецессией, а величина W — угловой скоростью прецессии.
Как уже отмечалось выше, приведенные рассуждения справедливы лишь для быстро вращающегося гироскопа, т. е. при
W<<w (3)
В- этих условиях можно считать, что N»Jw, где J — момент инерции гироскопа относительно его собственной 'оси вращения. Тогда
![]() (4)
(4)
Скажем несколько слов по поводу неравенства (3). Нетрудно видеть, что вектор полного момента количества движения гироскопа при наличии прецессии содержит две компоненты: Jw) и J1W (J1 — момент инерции гироскопа относительно его диаметра). Таким образом, вектор полного момента количества движения N, строго говоря, не совпадает по направлению с вектором угловой скорости w (с осью гироскопа). Этим несовпадением можно, однако, пренебречь при J1w<< Jw. Моменты инерции J и J1в нашем случае оказываются величинами одного порядка; в этом случае условием применимости формулы (4) является неравенство (3), которое. в обычных гироскопах выполняется очень хорошо (величины W и w отличаются друг от друга по крайней мере на три порядка).
В настоящей работе требуется определить угловую скорость вращения гироскопа по его регулярной прецессии.
Экспериментальная установка и методика измерения. Гироскоп (рис. 1) представляет собой миниатюрный электромотор 1, подвешенный к горизонтальному стержню. Стержень вместе с гироскопом может вращаться в вертикальной плоскости вокруг оси, укрепленной в вилке 2. Вращение в горизонтальной плоскости происходит вместе с вилкой в подвесе 3. Для увеличения момента инерции мотор снабжен маховиком 4. Мотор питается постоянным током.
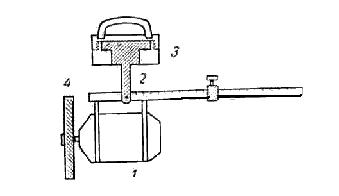
Рис.1
Уравновесим гироскоп и включим мотор. Даже при всей возможной тщательности в уравновешивании гироскоп начинает медленно прецессировать, поворачиваясь в горизонтальной плоскости. Это происходит, очевидно, потому, что вертикальная ось вращения гироскопа не проходит точно через его центр масс. Следовательно, момент силы тяжести, а также момент силы трения относительно вертикальной оси отличен от нуля. Уравнение (2) для этого случая можно записать в виде:
где My — момент сил тяжести и трения относительно вертикальной оси.
Заменяя в уравнении (4) угловую скорость периодом, получим:
![]() (5)
(5)
Сохраняя скорость вращения гироскопа неизменной (не меняя напряжения, поданного на мотор);
нагрузим свободный конец
стержня гироскопа гирькой весом Pi, подвесив ее на расстоянии, /I от вертикальной оси вращения. Момент силы тяжести примет новое значение:
![]() (6)
(6)
но
![]() и следовательно
и следовательно![]() (7)
(7)
Поделив (5) на (7), получим
![]() (8)
(8)
Последнее равенство может служить для проверки соотношения (2).
Задание. Произведите измерение скорости прецессии уравновешенного
гироскопа при трех положениях (/![]() груза, отличных от положения равновесия.
груза, отличных от положения равновесия.
Для измерения подайте на обмотки двигателя напряжение 220 В, и выждите 2—3 мин, удерживая стержень в горизонтальном положении. Плавно отпустите стержень и подсчитайте с помощью секундомера время трех полных оборотов стержня. Закончив измерения скорости прецессии, подайте на обмотки мотора напряжение 200 В. Дайте мотору раскрутиться, а затем выключите его и в течение времени, пока движение мотора замедляется, сделайте 3—4 замера периода прецессии. Произведите проверку равенства (8) по данным измерений.
Контрольные вопросы. 1. Какое допущение лежит в основе приближенной теории гироскопа? 2. Какая часть момента инерции осталась неучтенной при расчете момента инерции маховика? Как грубо учесть ее? 3. Какой качественный вывод можно сделать из наблюдения прецессии при выключенном двигателе? 4. Объясните возникновение прецессии детского волчка.
Применение гироскопов.
Гироскоп - основная часть таких приборов, как указатель курса, поворота, горизонта, сторон света, гирокомпас. Внутри этих приборов вращаются со скоростью в несколько десятков тысяч оборотов в минуту небольшие роторы-волчки, укрепленные в кардановом подвесе. Корпус прибора можно поворачивать как угодно, при этом ось вращающегося гироскопа будет сохранять неизменное положение в пространстве.
Большое применение находят гироскопические приборы для автоматического управления движением самолетов и кораблей. Для поддержания заданного курса корабля служит <авторулевой>, а самолета - <автопилот>.
В приборе <авторулевой> применен свободный гироскоп с большим собственным моментом импульса и малой силой трения в местах карданова подвеса. Направление движения корабля задается направлением оси свободного гироскопа. При любых отклонениях корабля от курса, ось гироскопа сохраняет свое прежнее пространственное направление, а карданов подвес поворачивается относительно корпуса корабля. Поворот рамы карданова подвеса отслеживается при помощи специальных устройств которые выдают команды автоматам на поворот руля и возвращение корабля на заданный курс.
<Автопилот> снабжен двумя гироскопами. У одного из них ось располагают вертикально и в таком положении раскручивают гироскоп. Вертикально расположенная ось гироскопа задает горизонтальную плоскость. Ось второго гироскопа располагают горизонтально, ориентируя ее вдоль оси самолета. Этот гироскоп постоянно "знает" курс самолета. Оба гироскопа дают соответствующие команды механизмам управления, поддерживающим полет самолета по заданному курсу.
В настоящее время автопилотами оборудованы все современные самолеты, предназначенные для длительных полетов. Гироскоп служит важной составной частью в системах управления космических аппаратов.
Гироскопы применяют так же в системах навигации.
Инерциальная навигация относится к такому способу определения
местоположения в пространстве, при котором не используются данные каких-либо
внешних источников. Все чувствительные элементы находятся непосредственно на
борту транспортного средства. Инерциальные измерители линейных ускорений - акселерометры
установлены на так называемой гиростабилизированной платформе.
Эта платформа, используя свойства гироскопа - сохранять неизменной ориентацию
своей оси в пространстве, обеспечивает строго горизонтальное положение осей
чувствительности акселерометров (с точностью до единиц угловых секунд).
Измеренные ускорения дважды интегрируются, и, таким образом, получается
информация о приращении местоположения подвижного объекта. Объединенные общей
задачей определения координат подвижного объекта, гироскопы и акселерометры
образуют инерциальную навигационную систему (ИНС). Помимо
этой задачи ИНС поставляет информацию об угловой ориентации объекта: углах
крена, тангажа и рыскания (курса) и о скорости объекта.
Конструкция современной ИНС вобрала в себя последние достижения точной
механики, теории автоматического управления, электроники и вычислительной
техники.
Конструктивно ИНС можно разделить на два класса: платформенные и бескарданные.
В первых гиростабилизированная платформа реализована физически в виде рамы
трехстепенного карданного подвеса. В таких системах используются традиционные
гироскопы с вращающимся ротором. Точность таких систем может достигать 1
морской мили (900 м) за час работы. Эти системы входят в состав бортового
навигационного оборудования тяжелых самолетов.
Другой класс - бесплатформенные ИНС (БИНС) отличаются
тем, что плоскость горизонта в них реализована математически, используя данные
гироскопов и акселерометров. В этих системах могут быть использованы лазерные и
волоконно-оптические гироскопы. Здесь нет вращающихся частей, а об угловой
скорости судят по фазовой задержке лазерного луча пробегающего по замкнутому
контуру. Точность этих систем 1 морская миля за час. Они существенно
конструктивно проще и дешевле платформенных. По последним данным лучшие образцы
БИНС способны показывать точность, сравнимую с точностью платформенных систем.
Гироскоп чаще всего применяется как чувствительный элемент указывающих гироскопических приборов и как датчик угла поворота или угловой скорости для устройств автоматического управления. В некоторых случаях, например в гиростабилизаторах, гироскопы используются как генераторы момента силы или энергии.
Основные области применения гироскопов – судоходство, авиация и космонавтика.
Рассмотрим инерциальную навигацию подробно - метод измерения ускорения судна или летательного аппарата и определения его скорости, положения и расстояния, пройденного им от исходной точки, при помощи автономной системы. Системы инерциальной навигации (наведения) вырабатывают навигационную информацию и данные для управления на борту самолетов, ракет, космических аппаратов, морских судов и подлодок.
Теоретические основы. Ускорение есть быстрота изменения скорости, а скорость – быстрота изменения положения. Измеряя ускорение движения, можно путем его интегрирования вычислять скорость. Интегрированием же скорости можно определять текущее местоположение (координаты) летательного аппарата или судна. Таким образом, система инерциальной навигации есть система счисления пути.
Ускорение является векторной величиной, которая имеет не только численное значение, но и направление. Следовательно, система датчиков, определяющая ускорение, должна измерять и его величину, и его направление. Акселерометр измеряет величину. Информацию о направлении дают гироскопы, обеспечивающие опорную систему координат для акселерометров.
Акселерометры, измеряя фактическое ускорение, скажем, летательного аппарата, в то же время реагируют на гравитационное поле. Для компенсации этого ускорения система инерциальной навигации вычитает из выходных данных акселерометров вычисленное значение g. Величина g вычисляется как функция местоположения (координат), в частности долготы и широты.
Итак, система инерциальной навигации измеряет кажущееся ускорение, в которое входит ускорение свободного падения. Затем она, дважды интегрируя эту величину, находит местоположение. И наконец, исходя из этого вычисленного местоположения, вычисляет величину g, которая вычитается из кажущегося ускорения. Такая система с обратной связью второго порядка (рис. 1) ведет себя, как генератор колебаний очень низкой частоты в двух ортогональных горизонтальных направлениях. Период колебаний на уровне моря равен 84 мин; они называются колебаниями Шулера по имени немецкого изобретателя М.Шулера, запатентовавшего в 1908 первый практически пригодный гирокомпас.
 |
Рис. 1. ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА с обратной связью. Система измеряет кажущееся ускорение (в которое входит ускорение свободного падения g) и, дважды интегрируя его, находит местоположение, затем с учетом последнего определяет ускорение g и, вычитая его из кажущегося ускорения, находит истинное ускорение движения летательного аппарата или судна.
Варианты системы. В прежних системах инерциальной навигации опорная система координат обеспечивалась установкой акселерометров и гироскопов на стабилизированной платформе в кардановом подвесе. Такой подвес изолировал платформу от поворотов летательного аппарата или судна. Это позволяло удерживать акселерометры в неизменной ориентации относительно Земли при движении объекта.
В современных системах инерциальной навигации применяются компьютеры, следящие за ориентацией акселерометров. Такие системы называются бесплатформенными. Выходные данные гироскопов поступают непосредственно на компьютер, который вычисляет мгновенное направление акселерометров в опорной системе координат и соответствующие корректирующие сигналы.
Инерциальные приборы. Основными приборами системы инерциальной навигации являются акселерометры и гироскопы. Акселерометр наиболее распространенного вида представляет собой чувствительную массу, связанную с корпусом пружиной того или иного рода. Пружина может быть механической, но чаще всего это электрическое (электромагнитное, электростатическое или пьезоэлектрическое) устройство, которое создает противодействующую силу. При отклонении корпуса (относительно массы), вызванном приложенным ускорением, появляется сигнал. Электронный усилитель, усилив этот сигнал, создает соответствующую ускорению противодействующую силу пружины (приложенную к массе), которая в системе обратной связи сводит сигнал рассогласования к нулю (рис. 2).
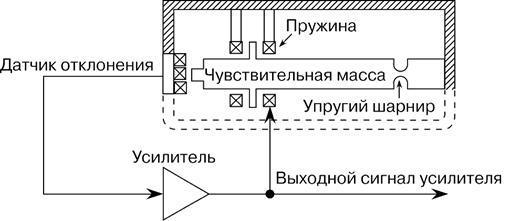 |
Рис. 2. АКСЕЛЕРОМЕТР. Ускорение движения вызывает отклонение чувствительной массы, закрепленной на упругом шарнире. Сигнал датчика отклонения усиливается и создает пропорциональную ускорению противодействующую силу пружины, приложенную к чувствительной массе, тем самым возвращая сигнал датчика к нулевому значению.
 |
В системах наведения баллистических ракет и космических летательных аппаратов, где точность определения скорости является критически важной, в качестве противодействующей силы ранее использовалась реакция гироскопа, а ускорение автоматически интегрировалось для нахождения скорости. В обычном механическом гироскопе посредством вращающегося ротора, подобного юле, поддерживается фиксированное направление в пространстве. Чтобы прибор был достаточно стабилен для целей инерциальной навигации, должны быть исключены трение и другие возмущающие воздействия. Поэтому огромное значение имеют точные
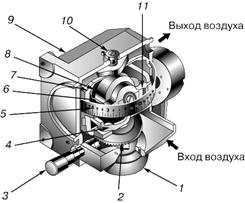
Рис. 2. АВИАЦИОННЫЙ ГИРОУКАЗАТЕЛЬ КУРСА с воздушным приводом. Пример применения трехстепенного гироскопа. Арретир служит для удержания оси собственного вращения ротора в горизонтальном положении при вводе азимута по шкале. 1 – основание; 2 – зубчатое колесо синхронизатора; 3 – ручка арретира; 4 – арретир; 5 – шкала азимута; 6 – воздушное сопло; 7 – наружная рамка; 8 – ротор; 9 – корпус; 10 – полуось наружной рамки с фиксаторной гайкой; 11 – внутренняя рамка.
расчеты и тщательность изготовления гироскопических приборов. Тем не менее, основной причиной возникновения ошибки в механическом гироскопе является трение в движущихся частях.
Пример применения трехстепенного гироскопа в авиационном указателе курса (гирополукомпасе). Вращение ротора в шарикоподшипниках создается и поддерживается струей сжатого воздуха, направленной на рифленую поверхность обода. Внутренняя и наружная рамки карданова подвеса обеспечивают полную свободу вращения оси
ДВУХСТЕПЕННЫЙ ГИРОСКОП
Во многих гироскопических приборах используется упрощенный, двухстепенный вариант гироскопа, в котором наружная рамка трехстепенного гироскопа устранена, а полуоси внутренней закрепляются непосредственно в стенках корпуса, жестко связанного с движущимся объектом. Если в таком устройстве единственная рамка ничем не ограничена, то момент внешней силы относительно оси, связанной с корпусом и перпендикулярной оси рамки, заставит ось собственного вращения ротора непрерывно прецессировать в сторону от этого первоначального направления. Прецессия будет продолжаться до тех пор, пока ось собственного вращения не окажется параллельной направлению момента силы, т.е. в положении, при котором гироскопический эффект отсутствует. На практике такая возможность исключается благодаря тому, что задаются условия, при которых поворот рамки относительно корпуса не выходит за пределы малого угла.
Если прецессия ограничивается только инерционной реакцией рамки с ротором, то угол поворота рамки в любой момент времени определяется проинтегрированным ускоряющим моментом. Поскольку момент инерции рамки обычно сравнительно мал, она слишком быстро реагирует на вынужденное вращение. Имеются два способа устранить этот недостаток.
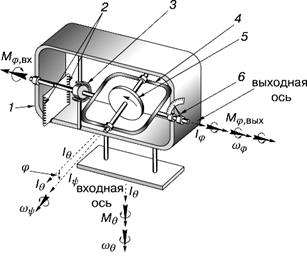
Противодействующая пружина и вязкостный демпфер. Датчик угловой скорости. Прецессию оси вращения ротора в направлении вектора момента силы, направленного вдоль оси, перпендикулярной оси рамки, можно ограничить пружиной и демпфером, воздействующими на ось рамки. Кинематическая схема двухстепенного гироскопа с противодействующей пружиной представлена на рис. 3. Ось вращающегося ротора закреплена в рамке перпендикулярно оси вращения последней относительно корпуса. Входной осью гироскопа называется направление, связанное с основанием, перпендикулярное оси рамки и оси собственного вращения ротора при недеформированной пружине.
собственного вращения ротора. По шкале азимута, прикрепленной к наружной рамке, можно ввести любое значение азимута, выровняв ось собственного вращения ротора с основанием прибора. Трение в подшипниках столь незначительно, что после того как это значение азимута
Рис. 3. ДВУХСТЕПЕННЫЙ ГИРОСКОП с противодействующей пружиной, вязкостным демпфером и стрелочным индикатором угловой скорости (вязкостный демпфер служит только для успокоения колебаний). 1 – корпус; 2 – пружины; 3 – вязкостный демпфер; 4 – рамка; 5 – ротор; 6 – указатель выходного угла рамки j.
 |
введено, ось вращения ротора сохраняет заданное положение в пространстве, и, пользуясь стрелкой, скрепленной с основанием, по шкале азимута можно контролировать поворот самолета. Показания поворота не обнаруживают никаких отклонений, если не считать эффектов дрейфа, связанных с несовершенствами механизма, и не требуют связи с внешними (например, наземными) средствами навигации
Момент внешней силы относительно опорной оси вращения ротора, приложенный к основанию в тот момент времени, когда основание не вращается в инерциальном пространстве и, следовательно, ось вращения ротора совпадает со своим опорным направлением, заставляет ось вращения ротора прецессировать в сторону входной оси, так что угол отклонения рамки начинает увеличиваться. Это эквивалентно приложению момента силы к противодействующей пружине, в чем состоит важная функция ротора, который в ответ на возникновение входного момента силы создает момент силы относительно выходной оси (рис. 3). При постоянной входной угловой скорости выходной момент силы гироскопа продолжает деформировать пружину, пока создаваемый ею момент силы, воздействующий на рамку, не заставит ось вращения ротора прецессировать вокруг входной оси. Когда скорость такой прецессии, вызванной моментом, создаваемым пружиной, сравняется с входной угловой скоростью, достигается равновесие и угол рамки перестает изменяться. Таким образом, угол отклонения рамки гироскопа (рис. 3), указываемый стрелкой на шкале, позволяет судить о направлении и угловой скорости поворота движущегося объекта.
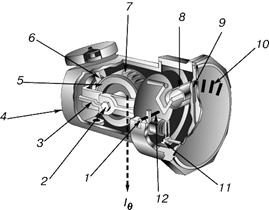 |
На рис. 4 показаны основные элементы указателя (датчика) угловой
Рис. 4. УКАЗАТЕЛЬ УГЛОВОЙ СКОРОСТИ – авиационный прибор с двухстепенным гироскопом. 1 – регулировка противодействующей пружины; 2 – ось собственного вращения ротора; 3 – рамка; 4 – корпус; 5 – ротор; 6 – воздушное сопло; 7 – турбинный обод ротора; 8 – демпфер рамки; 9 – стрелка; 10 – шкала; 11 – указывающая система; 12 – противодействующая пружина.
скорости, ставшего в настоящее время одним из самых обычных авиакосмических приборов.
В последнее время механические гироскопы все чаще заменяются оптическими. Последние особенно подходят для бесплатформенных систем инерциальной навигации. Оптические гироскопы основаны на принципе Саньяка, названном по имени французского физика С.Саньяка, который в 1913 построил оптический интерферометр для измерения скорости вращения.
Лазерный гироскоп (рис. 3) представляет собой кольцевой резонатор с тремя или четырьмя зеркалами, расположенными по углам треугольника или квадрата. Два лазерных пучка, генерируемые в самой системе, проходят по резонатору в противоположных направлениях. Интерферируя, они дают картину из светлых и темных пятен. Эта картина сохраняет свое положение в пространстве, и при повороте резонатора (корпуса гироскопа)
 |
Рис. 3. ЛАЗЕРНЫЙ ГИРОСКОП. Два лазерных луча, генерируемые разрядом между анодами и катодом, распространяются навстречу друг другу в кольцевом резонаторе, образованном зеркалами. Взаимодействуя, лучи дают интерференционную картину в виде системы пятен, по перемещению которой можно определить поворот ротора гироскопа
фотоприемник регистрирует поворот, считая пробегающие по нему пятна.
Работе лазерного гироскопа вредит обратное рассеяние, т.е. рассеяние лазерного луча на поверхностях зеркал и на молекулах газа, встречающихся на пути луча. Обратное рассеяние нарушает картину пятен таким образом, что она поворачивается вместе с корпусом. Устранение и сведение к минимуму обратного рассеяния требуют высочайшей точности при проектировании и изготовлении лазерных гироскопов.
Существуют лазерные гироскопы. Лазерный гироскоп включает в себя угловую шкалу, задаваемую длиной волны лазерного излучения. Это качественно другая угловая шкала, в которой отсутствуют ошибки делительной машины.
Известно, что лазерные гироскопы с успехом используются в системах навигации самолетов, ракет, наземных средств передвижения.
Менее известно применение лазерных гироскопов в машиностроении, приборостроении и метрологии. Вместе с тем их использование дает широкие перспективы для улучшения параметров различных приборов, в которых проводится измерение углов.
В машиностроении лазерные гироскопы могут использоваться в высокоточных делительных столах, в приборах для высокоточного измерения угла поворота вала, для контроля погрешности высокоточных датчиков угла, в приборах для контроля углов угловых мер, образцовых многогранных призм , штриховых лимбов и т.д.
Интересным является использование лазерного гироскопа в приборах для измерения профиля зубчатых колес.
Волоконно-оптический гироскоп (рис. 4) действует по принципу интерферометра Саньяка. Свет в нем направляется по замкнутому пути с помощью оптического волновода. Для увеличения длины оптического пути и повышения чувствительности гироскопа оптическое волокно свернуто в спираль. В волоконно-оптическом гироскопе используется внешний лазерный источник света. И здесь обратное рассеяние остается серьезной проблемой
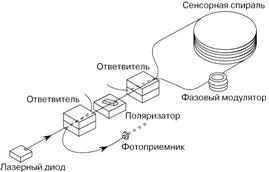
Рис. 4. ВОЛОКОННО-ОПТИЧЕСКИЙ ГИРОСКОП. Лазерные лучи распространяются по замкнутому пути, частью которого является свернутое в спираль оптическое волокно. Поворот гироскопа определяется посредством фотоприемника, регистрирующего интерференционную картину пятен, создаваемую лучами.
Достоинства и недостатки. Поскольку системы инерциальной навигации автономны, на их работе не сказываются погодные условия. Они не поддаются радиоэлектронному подавлению и обеспечивают скрытность (не генерируют электромагнитного излучения, выдающего присутствие летательного аппарата).
Одним из недостатков систем инерциальной навигации является то, что их необходимо настраивать (выставлять) не только по скорости и местоположению, но и по пространственному положению (ориентации относительно заданной базы, например горизонта). Пространственное положение можно задать, пользуясь акселерометрами для определения направления вертикали и гироскопами для определения вращения Земли. Этими векторами определяются оси опорной системы координат (но только не в том случае, когда объект находится на Южном или Северном полюсе; в этом случае направление вертикали коллинеарно оси земного вращения и система не может определить азимут). Процесс выставки занимает несколько минут или более. Общее правило таково, что чем меньше время выставки, тем ниже чувствительность и точность системы.
Большим недостатком системы инерциальной навигации является то, что ее ошибка со временем накапливается. Это обусловлено интегрирующим действием самой системы. Скорость вычисляется интегрированием ускорения, и постоянная ошибка ускорения преобразуется в непрерывно нарастающую ошибку скорости. Благодаря обратной связи по ускорению свободного падения нарастание ошибки происходит лишь в пределах одного периода колебаний Шулера (84 мин). Однако для баллистических ракет и это много. Кроме того, из-за многочисленных малых погрешностей измерения амплитуда этих колебаний со временем увеличивается. В связи с ошибками гироскопа возникают ошибки направления при измерении кажущегося ускорения и ускорения свободного падения, что тоже приводит к нарастанию дополнительных ошибок.
Вспомогательные навигационные средства. Если накопленная ошибка становится слишком большой, ее можно корректировать с помощью внешних вспомогательных средств. Конечно, тогда система становится неавтономной. К внешним навигационным средствам относятся доплеровские радиолокационные станции, системы астроориентации, радиолокационные средства определения местоположения, навигационные спутники и различные электронные системы наземного базирования («Такан», «Лоран», «Омега»).
Для оптимального использования данных, поступающих от внешних вспомогательных средств, нужно, чтобы тщательно учитывались характеристики и погрешности этих и бортовых навигационных средств. Оптимальное объединение данных разных источников обеспечивает «обобщенный фильтр Калмана», названный по имени американского математика венгерского происхождения Ф.Калмана, опубликовавшего в 1961 свой метод фильтрации. Эта вычислительная процедура представляет собой алгоритм, допускающий компьютерную реализацию. Он применяется почти во всех инерциальных навигационных системах
Почти каждое морское судно дальнего плавания снабжено гирокомпасом для ручного или автоматического управления судном, некоторые оборудованы гиростабилизаторами. В системах управления огнем корабельной артиллерии много дополнительных гироскопов, обеспечивающих стабильную систему отсчета или измеряющих угловые скорости. Без гироскопов невозможно автоматическое управление торпедами. Самолеты и вертолеты оборудуются гироскопическими приборами, которые дают надежную информацию для систем стабилизации и навигации. К таким приборам относятся авиагоризонт, гировертикаль, гироскопический указатель крена и поворота. Гироскопы могут быть как указывающими приборами, так и датчиками автопилота. На многих самолетах предусматриваются гиростабилизированные магнитные компасы и другое оборудование – навигационные визиры, фотоаппараты с гироскопом, гиросекстанты. В военной авиации гироскопы применяются также в прицелах воздушной стрельбы и бомбометания.
Гироскопы разного назначения (навигационные, силовые) выпускаются разных типоразмеров в зависимости от условий работы и требуемой точности. В гироскопических приборах диаметр ротора составляет 4–20 см, причем меньшее значение относится к авиационно-космическим приборам. Диаметры же роторов судовых гиростабилизаторов измеряются метрами.
| Оборудование летательных аппаратов | |
|
Практическая работа N12-6 СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ СВС-72-3 (Продолжительность практической работы - 4 часа) I. ЦЕЛЬ РАБОТЫ Целью работы ячвляется ... Трехстепенной астатический гироскоп не обладает в отличие, например, от магнитного компаса, способностью устанавливаться по направлению меридиана, так как его главная ось сохраняет ... При этом гироскоп потеряет одну степень свободы и под действием момента М? станет, как обычное твердое тело, ускоренно вращаться вокруг оси наружной рамы с увеличивающейся угловой ... |
Раздел: Рефераты по авиации и космонавтике Тип: реферат |
| Разработка алгоритмов контроля и диагностики системы управления ... | |
|
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ "ХАРКІВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ" Факультет І Кафедра "Системи та процеси ... Наряду с динамическими уравнениями рассматриваются кинематические уравнения, связывающие угловые скорости j с углами поворота триэдра осей Oxyz относительно триэдра осей некоторой ... Наибольшее распространение в бесплатформенных системах ориентации и навигации получают прецизионные датчики угловых скоростей (ДУС) и гироскопы на электростатическом подвесе ... |
Раздел: Рефераты по авиации и космонавтике Тип: реферат |
| Лазерная технология | |
|
ПЛАН 1. История открытия 2. Принцип работы лазера 2.1 Сущность явления усиления света 2.2 Активные вещества 2.3 Резонаторы 2.4 Устройства накачки 3 ... Лазерные лучи строго монохроматичны и когерентны, имеют очень малую угловую расходимость, имеют огромную мощность излучения. Перечень областей применений лазерного луча в наши дни был бы не полон, если бы мы не вспомнили полиграфию с ее лазерными принтерами и настольными печатными машинами, экологический ... |
Раздел: Рефераты по физике Тип: реферат |
| Модернизация подвески автомобиля ЗАЗ1102 Таврия | |
|
СОДЕРЖАНИЕ Введение и постановка задачи Условные обозначения 1 Требования к подвеске 2 Подвеска на направляющих пружинах и амортизационных стойках 2.1 ... Мягкие пружины и большие хода подвески являются предпосылкой высокой плавности хода автомобиля, достаточной свободы продольных угловых колебаний кузова и хорошего держания, дороги ... Если упругим элементом служат продольные торсионы, поперечная рессора или в верхней опорной точке фиксируется только шток, а не пружина подвески, то при повороте руля происходит ... |
Раздел: Рефераты по транспорту Тип: дипломная работа |
| Механика, молекулярная физика и термодинамика | |
|
Министерство образования Российской Федерации Омский государственный технический университет МЕХАНИКА, МОЛЕКУЛЯРНАЯ ФИЗИКА И ТЕРМОДИНАМИКА Учебное ... Угловое перемещение - вектор, численно равный углу поворота тела за время и направленный вдоль оси вращения так, что если смотреть вдоль него, то поворот тела наблюдается ... Определить зависимость угловой скорости и углового ускорения от времени для твердого тела, вращающегося вокруг неподвижной оси z по закону j=at-bt2, где a=20 рад/с, b=1 рад/с2. |
Раздел: Рефераты по физике Тип: учебное пособие |