Курсовая работа: Проектирование плазменно-ионного двигателя
УДК 629.7.064.5
Инв. № _______
МІНІСТЕРСТВО ОСВІТИ ТА НАУКИ УКРАЇНИ
Національний аерокосмічний університет
ім. М.Є. Жуковського
«Харківський авіаційний інститут»
Кафедра двигунів та енергоустановок ЛА
Проектування плазмово-іонного двигуна
РОЗРАХУНКОВО - ПОЯСНЮВАЛЬНА ЗАПИСКА
до проекту за курсом «Основи теорії та функціонування плазмових прискорювачів і енергетичних установок»
ХАИ.441.06.КР.11.ПЗ.00.00
Виконала
студентка гр.xxxxxx
xxxxxxxx.
Консультант
xxxxxxxxxx.
Нормоконтроль
xxxxxx.
Харків 2006
СОДЕРЖАНИЕ
СОДЕРЖАНИЕ. 2
РЕФЕРАТ. 4
ПЕРЕЧЕНЬ УСЛОВНЫХ ОБОЗНАЧЕНИЙ, СИМВОЛОВ, СОКРАЩЕНИЙ И ТЕРМИНОВ.. 5
ВВЕДЕНИЕ. 11
Задание. 13
1 Расчет тяги ЭРД и определение его электрической мощности. 14
2 Разработка и описание теоретического чертежа размещения ЭРД на спутнике 17
3 Разработка функциональной схемы двигательного блока. Описание схемы.. 18
4 Инженерный расчёт ПИД.. 20
4.1 Принцип работы ПИД и схема его расчета. 20
4.2 Выбор рабочего тела для ПИД.. 21
4.3 Расчет параметров ионно-оптической системы.. 22
4.4 Расчет параметров газоразрядной камеры ПИД.. 27
4.5 Расчёт магнитного поля в ПИД.. 30
5 Разработка и описание теоретического чертежа двигателя. 37
6 Расчёт системы хранения и подачи рабочего тела. 39
6.1 Разработка и описание функциональной схемы системы хранения и подачи рабочего вещества. 39
6.2 Определение основных параметров бака для хранения рабочего вещества 40
6.3 Расчет проектных параметров ресивера. 43
6.4 Расчет проектных параметров термодросселя. 46
6.5 Расчет проектных параметров жиклера. 47
7 Описание функциональной схемы системы электропитания ПИД.. 49
8 Разработка и описание теоретического чертежа двигательного блока. 50
9 Разработка циклограммы энергопотребления. 51
Выводы.. 53
Перечень ссылок. 54
Приложение. 55
РЕФЕРАТ
Страниц — 52, таблиц — 2, рисунков — 3.
Объектом разработки данного проекта является двигательная установка для стабилизации параметров орбиты космического аппарата, целевым направлением которого является наблюдение за поверхностью Земли.
Цель работы – спроектировать электрореактивную двигательную установку на базе плазменно-ионного движителя. В процессе разработки использовались рекомендованные методики.
Произведен расчет параметров и геометрических размеров плазменно-ионного движителя. Разработаны система хранения и подачи рабочего вещества (ксенона), описано функционирование двигательного блока. В соответствии с расчетами разработаны чертежи двигательного блока.
Космический аппарат, плазменно-ионный движитель, ионно-оптическая система, газоразрядная камера, магнитное поле, электрод, катод, ресивер, бак, потенциал ионизации, ускоряющее напряжение, эффективная площадь движителя, плотность тока, цена иона, тяга движителя, массовый расход рабочего тела, удельный импульс движителя, время работы движителя.
ПЕРЕЧЕНЬ УСЛОВНЫХ ОБОЗНАЧЕНИЙ, СИМВОЛОВ, СОКРАЩЕНИЙ И ТЕРМИНОВ
а – радиус орбиты космического аппарата относительно центра земли, км;
B – индукция магнитного поля, ![]()
![]() - ширина полюсных наконечников,
- ширина полюсных наконечников, ![]()
![]() - цена иона, эВ/ион;
- цена иона, эВ/ион;
![]() – коэффициент аэродинамического
сопротивления;
– коэффициент аэродинамического
сопротивления;
![]() - расстояние между электродами ионно-оптической
системы, мм;
- расстояние между электродами ионно-оптической
системы, мм;
![]() - диаметр бака,
- диаметр бака, ![]()
![]() - диаметр движителя, м;
- диаметр движителя, м;
![]() - диаметр проволоки соленоида,
- диаметр проволоки соленоида, ![]()
![]() - диаметр ресивера,
- диаметр ресивера, ![]()
![]() - характерный диаметр космического
аппарата, м;
- характерный диаметр космического
аппарата, м;
![]() - допускаемая
напряжённость электрического поля между электродами, В/см;
- допускаемая
напряжённость электрического поля между электродами, В/см;
G – геометрический параметр ионно-оптической системы;
h – высота орбиты относительно поверхности Земли, км;
![]() - ток соленоида,
- ток соленоида, ![]()
![]() - электронный ток с катода, А;
- электронный ток с катода, А;
![]() - ток ионного пучка, А;
- ток ионного пучка, А;
![]() - разрядный ток в газоразрядной камере, А;
- разрядный ток в газоразрядной камере, А;
![]() - удельный импульс движителя, м/с;
- удельный импульс движителя, м/с;
![]() - плотность тока, А/
- плотность тока, А/![]() ;
;
![]() - плотность тока
соленоида,
- плотность тока
соленоида, ![]()
![]() - коэффициент использования массы;
- коэффициент использования массы;
kз – гравитационный параметр Земли, км3/с2;
kрт - коэффициент, учитывающий потерю рабочего тела при хранении;
![]() - характерный размер камеры, длина
разрядной камеры движителя,
- характерный размер камеры, длина
разрядной камеры движителя, ![]()
![]() - масса конструкции бака,
- масса конструкции бака, ![]()
![]() - масса заправленного бака,
- масса заправленного бака, ![]()
![]() - масса конструкции ресивера,
- масса конструкции ресивера, ![]()
![]() - необходимый запас рабочего
тела, кг;
- необходимый запас рабочего
тела, кг;
![]() - полная масса рабочего вещества в ресивере,
- полная масса рабочего вещества в ресивере, ![]()
![]() - текущая масса рабочего вещества в ресивере,
- текущая масса рабочего вещества в ресивере,
![]() - масса рабочего вещества
покинувшего объём ресивера,
- масса рабочего вещества
покинувшего объём ресивера, ![]()
![]() - масса рабочего вещества,
находящегося в ресивере в момент его заполнения,
- масса рабочего вещества,
находящегося в ресивере в момент его заполнения, ![]()
![]() - секундный массовый
расход рабочего тела, кг/с;
- секундный массовый
расход рабочего тела, кг/с;
![]() - поступление массы рабочего
вещества в ресивер в единицу времени, кг/с;
- поступление массы рабочего
вещества в ресивер в единицу времени, кг/с;
![]() - число катушек соленоида;
- число катушек соленоида;
![]() - мощность, потребляемая двигательной
установкой, Вт;
- мощность, потребляемая двигательной
установкой, Вт;
![]() - средняя потребляемая мощность нагрузки, Вт;
- средняя потребляемая мощность нагрузки, Вт;
![]() - установившаяся мощность солнечной батареи, Вт;
- установившаяся мощность солнечной батареи, Вт;
![]() - число включений и включений
электроклапана;
- число включений и включений
электроклапана;
![]() - плотность ионов, количество
ионов в единице объёма, 1/
- плотность ионов, количество
ионов в единице объёма, 1/![]() ;
;
![]() - плотность электронов, количество электронов в
единице объёма, 1/
- плотность электронов, количество электронов в
единице объёма, 1/![]() ;
;
![]() - число отверстий в ионно-оптической
системе;
- число отверстий в ионно-оптической
системе;
![]() - критическое давление, при
котором происходит фазовый переход р.т.,
- критическое давление, при
котором происходит фазовый переход р.т., ![]()
![]() - максимальное давление, которое
может быть достигнуто в ресивере,
- максимальное давление, которое
может быть достигнуто в ресивере, ![]()
![]() - тяга электроракетного движителя, Н;
- тяга электроракетного движителя, Н;
![]() - первеанс,
- первеанс, ![]()
![]() - давление внутри ресивера,
- давление внутри ресивера, ![]()
![]() - давление внутри движителя,
- давление внутри движителя, ![]()
![]() - принимаемое давление хранения
р.т.,
- принимаемое давление хранения
р.т., ![]()
![]() - универсальная газовая постоянная,
Дж·М/К;
- универсальная газовая постоянная,
Дж·М/К;
Rатм - сила сопротивления атмосферы на заданной орбите;
![]() - радиус Земли, км;
- радиус Земли, км;
![]() - ларморовский радиус электронов,
- ларморовский радиус электронов,
![]()
![]() - ларморовский радиус ионов,
- ларморовский радиус ионов, ![]()
![]() - радиус наконечника катода,
- радиус наконечника катода, ![]()
![]() - расстояние от оси движителя до
полюсных наконечников,
- расстояние от оси движителя до
полюсных наконечников, ![]()
![]() - больший радиус тора, ресивера,
- больший радиус тора, ресивера, ![]()
![]() - характерный размер отверстия в
электродах, м;
- характерный размер отверстия в
электродах, м;
![]() - меньший радиус тора, ресивера,
- меньший радиус тора, ресивера, ![]()
![]() - площадь боковой поверхности
бака,
- площадь боковой поверхности
бака, ![]()
![]() - площадь боковой поверхности
ресивера,
- площадь боковой поверхности
ресивера, ![]()
![]() - площадь отверстий в ионно-оптической
системе,
- площадь отверстий в ионно-оптической
системе, ![]() ;
;
![]() - полная площадь сечения ПИД, м
- полная площадь сечения ПИД, м![]() ;
;
![]() - площадь проволоки соленоида,
- площадь проволоки соленоида, ![]()
![]() - характерная площадь поперечного
сечения космического аппарата,
- характерная площадь поперечного
сечения космического аппарата, ![]() ;
;
![]() - эффективная площадь сечения движителя,
м
- эффективная площадь сечения движителя,
м![]() ;
;
T - период обращения спутника вокруг Земли, с;
![]() - критическая температура, при
которой происходит фазовый переход р.т.,
- критическая температура, при
которой происходит фазовый переход р.т., ![]()
![]() - температура максвелловских электронов, К;
- температура максвелловских электронов, К;
![]() - температура, до которой бак
может разогреться в условиях космического пространства,
- температура, до которой бак
может разогреться в условиях космического пространства, ![]()
![]() - максимальная температура, до которой
ресивер может разогреться в УКП,
- максимальная температура, до которой
ресивер может разогреться в УКП, ![]()
![]() - температура внутри ресивера,
- температура внутри ресивера, ![]()
![]() - принимаемая температура
хранения р.т.,
- принимаемая температура
хранения р.т., ![]()
![]() - время заполнения всего объёма
ресивера, с;
- время заполнения всего объёма
ресивера, с;
![]() - время цикла работы ресивера, с;
- время цикла работы ресивера, с;
![]() - ускоряющее напряжение между электродами ионно-оптической
системы, В;
- ускоряющее напряжение между электродами ионно-оптической
системы, В;
![]() - объём бака,
- объём бака, ![]()
![]() - скорость истечения рабочего
тела,
- скорость истечения рабочего
тела, ![]() ;
;
![]() - скорость космического аппарата на
орбите, км/с;
- скорость космического аппарата на
орбите, км/с;
![]() - объём ресивера,
- объём ресивера, ![]()
![]() - характеристическая скорость космического аппарата
на орбите, км/с;
- характеристическая скорость космического аппарата
на орбите, км/с;
Xe – ксенон, рабочее тело движителя;
![]() - напряжение разряда в газоразрядной камере, эВ;
- напряжение разряда в газоразрядной камере, эВ;
![]() - число ампер витков одной
катушки;
- число ампер витков одной
катушки;
![]() - суммарное число ампер витков;
- суммарное число ампер витков;
α – выработка рабочего тела из бака;
g - коэффициент складирования;
![]() - минимальная толщина стенки
бака,
- минимальная толщина стенки
бака, ![]()
![]() - минимальная толщина стенки
ресивера,
- минимальная толщина стенки
ресивера, ![]()
![]() - толщина ускоряющего электрода ионно-оптической
системы, мм;
- толщина ускоряющего электрода ионно-оптической
системы, мм;
![]() - толщина экранного электрода ионно-оптической
системы, мм;
- толщина экранного электрода ионно-оптической
системы, мм;
![]() - толщина стенки ресивера,
- толщина стенки ресивера, ![]()
![]() - прозрачность
электродов;
- прозрачность
электродов;
![]() - коэффициент полезного действия движителя;
- коэффициент полезного действия движителя;
![]() - плотность композиционного
материала, из которого изготовлен бак,
- плотность композиционного
материала, из которого изготовлен бак, ![]()
![]() – плотность воздуха на
заданной орбите, кг/м3;
– плотность воздуха на
заданной орбите, кг/м3;
![]() - плотность материала ресивера,
- плотность материала ресивера, ![]()
![]() - предел текучести,
- предел текучести, ![]()
![]() - предел прочности,
- предел прочности, ![]()
![]() - время существования космического
аппарата, с;
- время существования космического
аппарата, с;
![]() - максимальное время нахождения космического аппарата
в тени Земли, с;
- максимальное время нахождения космического аппарата
в тени Земли, с;
![]() - минимальное время нахождения космического аппарата
на световом участке, с;
- минимальное время нахождения космического аппарата
на световом участке, с;
![]() - потенциал ионизации рабочего тела, эВ;
- потенциал ионизации рабочего тела, эВ;
![]() - первый потенциал возбуждения рабочего тела, эВ;
- первый потенциал возбуждения рабочего тела, эВ;
ГРК – газоразрядная камера;
ДУ – двигательная установка;
ИОС – ионно-оптическая система;
ИСЗ – искусственный спутник Земли;
КА – космический аппарат;
КЛА – космический летательный аппарат;
КМ – композиционный материал;
КПД – коэффициент полезного действия;
ПИД – плазменно-ионный движитель;
СХПРТ – система хранения и подачи рабочего тела;
УКП – условия космического пространства;
ЭРД – электроракетный движитель;
ЭРДУ - электроракетная двигательная установка.
ВВЕДЕНИЕ
Развитие космических систем различного назначения позволяет в настоящее время ставить и решать многие научно-технические, оборонные и народнохозяйственные задачи непосредственно в космосе
В настоящие время главное внимание уделяется разработкам ЭРДУ для выполнения следующих задач:
· стабилизация спутников: компенсация внешних возмущающих сил, вызываемых микрометеоритами, градиентами гравитационных полей и давлением солнечной радиации, компенсация внутренних возмущений, вызываемых движущимися элементами спутника, в том числе различными маховичными системами;
· орбитальные: коррекция ошибок в запуске, компенсация гравитационных сил, вызванных несферичностью Земли, и давления солнечной радиации.
· в интересах народного хозяйства: использование околоземного пространства для практических задач совершенствования связи, метеорологии, навигации, геодезии, разведки полезных ископаемых, мобилизации дополнительных сельскохозяйственных ресурсов.
Электрореактивные двигатели (ЭРД) открыли новое направление в космическом двигателестроении. ЭРД отличаются от существующих космических двигателей, работающих на химических топливах, более высокой экономичностью, но одновременно значительно меньшей тяговооружённостью, возможностью получения малых единичных импульсов, большим числом включений. Вместе с тем разделение источников энергии и рабочего вещества в ЭРД и использование электромагнитного поля для ускорения рабочего вещества позволяет значительно (на один-два порядка) увеличить удельный импульс, а соответственно и экономичность ЭРД по сравнению с химическими реактивными двигателями. Это предопределяет области применимости ЭРДУ для космических летательных аппаратов с большими временами активного функционирования (5-10 лет).
Задание
Спроектировать электрореактивную двигательную установку на базе плазменно-ионного движителя для ориентации орбиты искусственного спутника Земли.
ИСХОДНЫЕ ДАННЫЕ:
Таблица 1
| 1. Орбита — круговая |
|
| 2. Время существования КА |
|
| 3. Характерный диаметр КА |
|
| 4. КПД ЭРД, движителя |
|
1 Расчет тяги ЭРД и определение его электрической мощности
Определим скорость КА на заданной орбите по формуле:
 (км/с);
(км/с);
где k – гравитационный параметр Земли;
R - средний радиус Земли 6371 км;
h - высота орбиты 400 км.
Движение космического аппарата зависит от возмущающих сил, которые постепенно изменяют элементы орбиты. В первую очередь на орбиту влияют несферичность орбиты Земли и неравномерность распределения масс на ее поверхности и в недрах. Возмущения орбиты возникают также из-за сопротивления земной атмосферы, притяжения других небесных тел, давление солнечного света. Главные возмущения спутниковых орбит вызваны несферичностью Земли и сопротивлением атмосферы.
Включение бортовой двигательной установки на базе ЭРД позволяет компенсировать эти возмущения. При определении тяги ЭРД можно предположить, что для поддержания КА на заданной круговой орбите ЭРД должен компенсировать потерю скорости аппарата, вызванную только сопротивлением, оказываемым атмосферой на заданной орбите:
![]() (1.1)
(1.1)
Sэфф — площадь поперечного сечения аппарата;
Сx=1..2 — коэффициент аэродинамического сопротивления;
ρb=1,57·10-11 — плотность атмосферы на орбите h=400км.
Для начального расчета эффективную площадь можно определить из следующего выражения:
![]() (1.2)
(1.2)
Для выполнения своей задачи ЭРД включается периодически и время его работы составляет 10% от времени функционирования КА на орбите. Тяга ЭРД должна быть увеличена во столько раз, сколько уменьшено время работы двигателя.
РЭРД=![]()
Удельный импульс определим из выражения:
![]() (1.3)
(1.3)
![]() =0.7 - КПД электроракетного
двигателя;
=0.7 - КПД электроракетного
двигателя;
Вычисляем потребную электрическую мощность ЭРД:
![]() (1.4)
(1.4)
По полученному значению удельного импульса ![]() определяем тип ЭРД.
Принимаем в качестве электрореактивного движителя ПИД.
определяем тип ЭРД.
Принимаем в качестве электрореактивного движителя ПИД.
Для обеспечения работы ПИД в течение необходимого времени ЭРДУ должна включать в себя запас рабочего тела. Для того чтобы определить этот запас, необходимо знать расход рабочего тела через движитель. Частично ответ на этот вопрос может дать величина ионного тока. Однако не весь расход, превращаясь в ионы, покидает движитель в виде ионной струи. Часть нейтральных атомов рабочего тела не ионизируется в ГРК и проходит через электроды ИОС. Величиной, характеризующей степень совершенства использования рабочего тела, является hм, или коэффициент использования рабочего тела. Реально достигнутый диапазон hм лежит в пределах 0,8¸0,9. Выбрав оптимальную величину hм, определим реальный секундный расход рабочего тела. Для этого сделаем пересчет скорости истечения рабочего вещества из ПИДа:

 м/с (1.5)
м/с (1.5)
(1.6)
m•эд - реальный секундный расход рабочего тела.
Зная ресурс работы ЭРДУ, найдем общий запас рабочего тела:
![]() (1.6)
(1.6)
где kрт - коэффициент, учитывающий потерю рабочего тела при хранении (kрт~1,01÷1,05), принимаем равным 1,03.
Расчеты проведены по методическому пособию [1].
2 Разработка и описание теоретического чертежа размещения ЭРД на спутнике
На чертеже (ХАИ.06.441п.11.ТЧ.02.) приведен спроектированный космический аппарат (1). Фотоэлектрическая батарея (2) ориентирована и представляет собой 2 панели, в любом положении КА солнечные батареи обеспечивают потребную мощность. Космический аппарат предназначен для дистанционного зондирования Земли.
Двигательная установка (3)
расположена таким образом, что вектор тяги проходит через центр масс аппарата,
и лежит на одной прямой с вектором направления движения. По условиям задания КА
должен двигаться по круговой орбите на высоте h=400км, и в любом месте орбиты продольная ось аппарата должна
быть направленной на землю. Время функционирования составляет 10 процентов от
времени существования КА, т.е. ![]() . Для
выполнения данной задачи, недостаточно применения одного движителя, поэтому
решено установить на КА два движителя, работающих посменно. После того как
первый ПИД отработает свой ресурс, необходимо будет повернуть КА в пространстве
так, чтобы вектор тяги резервного ПИДа проходил через центр масс КА и лежал на
оси направления движения. На борту КА установлена измерительная аппаратура,
позволяющая проводить исследование уровня радиации, зондировать поверхность Земли,
измерять давление и температуру на соответствующей высоте.
. Для
выполнения данной задачи, недостаточно применения одного движителя, поэтому
решено установить на КА два движителя, работающих посменно. После того как
первый ПИД отработает свой ресурс, необходимо будет повернуть КА в пространстве
так, чтобы вектор тяги резервного ПИДа проходил через центр масс КА и лежал на
оси направления движения. На борту КА установлена измерительная аппаратура,
позволяющая проводить исследование уровня радиации, зондировать поверхность Земли,
измерять давление и температуру на соответствующей высоте.
3 Разработка функциональной схемы двигательного блока. Описание схемы
Функциональная схема (ХАИ.06.441.11.СГ.03.) дает подробное представление о работе двигательной установки и представляет собой совокупность функциональных элементов соединенных между собой. На данной схеме представлены прямые и обратные связи, по которым происходит обмен информацией между элементами.
На функциональной схеме представлены следующие элементы
1. Система управления (СУ);
1. Энергоустановка КА;
2. Система управления двигательной установкой (СУДУ);
3. Система электропитания (СЭП);
4. СХПРТ;
5. Двигательный блок (ДБ).
Система управления имеет связи почти со всеми элементами схемы. Это объясняется тем, что она играет главенствующую роль в работе движителя – координирует работу других систем.
Энергоустановка снабжает энергией все элементы движительного блока. Она не является объектом разработки в данной курсовой работе, но без нее работа движителя невозможна. Она имеет прямые и обратные связи с системой управления.
Система хранения и подачи рабочего тела обеспечивает хранение рабочего тела (в нашем случае это ксенон) во время полета, а также дальнейшую его подачу в ДБ через сложную систему датчиков, которые четко регулируют как количество, так и давление рабочего тела в трубопроводе, клапанов, которые используют для своевременной подачи или отключения подачи рабочего тела в полость трубопровода или на его выходе и т.д.
ДБ на структурной схеме состоит из ДБ1 и ДБ2, так как это необходимо для повышения надежности. ДБ является потребителем электроэнергии и рабочего тела.
4 Инженерный расчёт ПИД
4.1 Принцип работы ПИД и схема его расчета
Для проведения инженерного расчёта ПИД необходимо изучить механизм, определяющий его работу и конструктивные особенности. Рисунок 4.1 иллюстрирует процессы, включающие в себя рождение и ускорение ионов. Электроны, эмитируемые катодом, ускоряются электрическим полем (возникающим благодаря напряжению, приложенному к разряду) и соударяются с нейтральными частицами рабочего вещества, ионизируя его. В результате таких столкновений образуются ионы и электроны. Ионы под действием электростатических полей движутся к ИОС, а электроны к аноду. Для увеличения времени жизни электронов, в ГРК движителя создают магнитные поля осевой, радиальной или пристеночной конфигурации. Степень ионизации зависит от энергии электронов и их концентрации в рабочем объёме ГРК, а также от концентрации рабочего вещества. Концентрация рабочего вещества зависит от тяги движителя, которую необходимо обеспечить, и является функцией массового расхода, энергия электронов зависит от тока и напряжения катода.
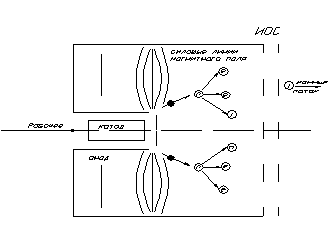
Рисунок 4.1 Схема столкновений в ГРК ПИД.
На рисунке 4.1 чёрными точками обозначены первичные электроны, которые при столкновении с нейтральными атомами (обозначенные буквой n в кружочке) образуют пару электрон-ион. Под действием электростатических сил электроны движутся к аноду, а ионы к ИОС. Столкновения электронов с нейтральными частицами рабочего тела приводит к появлению вторичных электронов и перераспределению между ними энергии. В ПИД первичные и вторичные электроны находятся совместно. Хотя концентрация первичных электронов мала (меньше 10% суммарной концентрации электронов), приблизительно половина всех актов ионизации происходит обычно при их участии.
Ионизация атомов рабочего тела происходит из возбуждённого состояния, реже из метастабильных состояний. Движение ионов в ГРК определяется главным образом потенциалом плазмы. При этом магнитное поле имеет небольшое влияние на направление движения ионов, поскольку величина ларморовского радиуса ионов как минимум на порядок превышает характерный размер движителя.
Ион-ионные столкновения слабо влияют на общее направление движения ионов, т.к. ионы ускоряются в основном в направлении градиента потенциала плазмы, а, следовательно, все ионы в заданной точке двигаются в одном общем направлении. Следовательно, ион-ионные столкновения должны мало влиять на движение потока ионов.
Часть ионов, которая движится к ускоряющим электродам, пересекает плазменный слой около экранирующего электрода и, ускоряясь напряжением в несколько киловольт, покидает электроды ИОС систему ПИД, создавая тягу движителя.
4.2 Выбор рабочего тела для ПИД
На первичном этапе разработки ПИД в качестве рабочих тел использовали металлы. Их выбор был связан в основном с самими ускорителями, а не определялся всей проблемой КЛА в целом. Металлы предпочтительны из-за своего большого атомного веса, высокой плотности рабочего тела, а в случае цезия – из-за низкого потенциала ионизации. Однако, при использование металлических рабочих тел возникает проблема их конденсации на КА, а в случае применения больших космических ЭРДУ существенным является и цена рабочего тела. В связи с этим появляется интерес к газообразным рабочим телам. При выборе рабочего тела необходимо принимать во внимание весь комплекс требований предъявляемых к рабочему веществу. Не одно рабочее тело не обладает такими свойствами, которые одновременно удовлетворяли бы всем предъявляемым к нему требованиям. Поэтому при выборе рабочего тела следует классификацию требований по их значимости для проектируемого движителя, которые определяются конструктором.
В расчёте данного движителя предпочтение отдаётся газообразным рабочим веществам, что связано с простотой СХПРТ, работающем на газообразном рабочем теле, и его малой массой, а также высокой надёжностью ЭРДУ в целом. При выборе рабочего тела необходимо учитывать его удельные и энергетические характеристики. Желательно использовать такие вещества, у которых низкий потенциал ионизации в сочетании с большой молекулярной массой. Низкий потенциал ионизации определяет минимальные затраты энергии подводимой на катод для ионизации рабочего вещества. Масса иона рабочего тела определяет тяговые характеристики движителя, а также объём рабочего вещества, который необходимо запасти для функционирования движителя в течение заданного промежутка времени.
Из всех газообразных веществ, используемых в качестве рабочего тела для ЭРД, в данном проекте выбирается инертный газ ксенон, который имеет малый потенциал ионизации при высокой молекулярной массе иона.
4.3 Расчет параметров ионно-оптической системы
Скорость истечения рабочего тела для ионного движителя равна (для однократно заряженных ионов):
(4.1)
где е – заряд электрона (1,6∙10-19 Кл);
mi – масса иона ( для ксенона ![]() );
);
Uуск – напряжение между электродами ионно-оптической системы, В.
Но так как ν известно из формулы (1.5), то из формулы (4.1) определяем необходимое ускоряющее напряжение:
 (4.2)
(4.2)
 Выражение для тяги ионного движителя с однократно
заряженными ионами запишем так:
Выражение для тяги ионного движителя с однократно
заряженными ионами запишем так:
(4.3)
где PЭРД – тяга ПИД, Н;
Ii – ток ионного пучка, А.
 Из выражения (4.3) можем определить ток ионного пучка Ii, необходимый при заданном напряжении
U для получения тяги R:
Из выражения (4.3) можем определить ток ионного пучка Ii, необходимый при заданном напряжении
U для получения тяги R:
(4.4)
Ионно-оптическая система является одним из основных узлов, определяющих работу плазменно-ионного движителя. Точные расчеты, проектирование и изготовление ее электродов увеличивает тяговый КПД движителя и его ресурс.
При расчете и проектировании ионно-оптических систем необходимо учитывать закономерности интенсивных ионных течений в стационарных электрических полях в условиях вакуума. Мерой интенсивности течений является его первеанс Р, определяемый как отношение тока пучка Ii к ускоряющему напряжению U в степени три вторых:
 (4.5)
(4.5)
Плотность тока для случая одномерного течения однозарядных ионов между плоскими параллельными электродами записывается следующим образом:

(4.6)
где j – плотность тока в ПИД, А/м2;
εо – электрическая постоянная, равная 8,85∙10-12 Ф∙м-1;
d – расстояние между электродами ИОС, м;
δэкр – толщина экранного электрода, м;
δуск – толщина ускоряющего электрода, м;
е – заряд электрона, Кл;
mi – масса иона, кг.
Принимаем δэкр=1∙10-3 м, δуск=1.5∙10-3 м [1].
Выбор расстояния между электродами d зависит от нескольких факторов: во-первых, так как к электродам ИОС приложены различные потенциалы, то действует электростатическая сила схлопывания; во-вторых, неравномерные тепловые потоки вызывают температурные напряжения в сетках, которые приводят к их деформации (в результате этого локальное изменение зазора может быть очень большим); в-третьих, так как между электродами ИОС приложено высокое напряжение, то уменьшение зазора может привести к нарушению диэлектрической прочности и, как следствие, к высоковольтному пробою, что нарушает работу движителя и может вывести его из строя. Примем допускаемую напряженность электрического поля равной Еmax=106 В/м. Таким образом, зная напряжение между электродами ИОС и выбрав допустимую величину Еmax, можем определить зазор между электродами:
 (4.7)
(4.7)
 Вычисляем плотность ионного тока в пучке:
Вычисляем плотность ионного тока в пучке:
(4.8)
 Таким образом, подсчитав плотность тока в ПИД,
определим эффективную площадь сечения:
Таким образом, подсчитав плотность тока в ПИД,
определим эффективную площадь сечения:
(4.9)
 Полная площадь сечения ПИД:
Полная площадь сечения ПИД:
(4.10)
где α – прозрачность электродов, показывающая, какую часть от полной поверхности электрода составляет суммарная площадь всех отверстий.
Из формулы (1.16) видно, что чем больше α, тем более совершенна ионно-оптическая система. Однако максимальная величина α ограничена двумя факторами: во-первых, ресурсом, во-вторых, технологическими возможностями. Более существенным является второй фактор. Следствием большой прозрачности является малая толщина перемычки между отверстиями. В случае получения отверстия методом сверления максимальная прозрачность будет равна α=0,7.
Следовательно, выбрав величину α, можно определить Sполн:
По Sполн находим диаметр ПИД:
(4.11)
 Важной характеристикой фокусируемых пучков является их геометрический параметр, равный отношению диаметра цилиндрического пучка 2∙ro к расстоянию d между
электродами ускорителя, в котором сфокусирован пучок:
Важной характеристикой фокусируемых пучков является их геометрический параметр, равный отношению диаметра цилиндрического пучка 2∙ro к расстоянию d между
электродами ускорителя, в котором сфокусирован пучок:
(4.12)
Опыт создания фокусирующих систем показывает, что фокусировка интенсивных пучков с геометрическим параметром, большим 1-3, представляет собой трудноразрешимую задачу. При R0>3…5 градиенты потенциала в направлении, перпендикулярном оси пучка, становятся столь значительными, что формирование параллельного пучка с помощью внешних фокусирующих электродов становится практически невозможным. Исходя из вышесказанного, задаемся значением R0=2. Считаем, что диаметр отверстий в электродах ускоряющей системы ПИД равен диаметру цилиндрического пучка, тогда получим:
![]()
![]()
 Зная диаметр, а, следовательно, и площадь одного
отверстия, находим их общее число:
Зная диаметр, а, следовательно, и площадь одного
отверстия, находим их общее число:
(4.13)
Наиболее оптимальной является сферическая конструкция ИОС. Её преимуществом (по сравнению с плоской) является однонаправленное изменение формы электродов под действием тепловых нагрузок, в результате чего межэлектродный зазор меняется в процессе работы на незначительную величину. Кроме того, сферические электроды обладают повышенной жёсткостью, что увеличивает их резонансную частоту.
Большое значение для нормальной работы ИОС имеет правильный выбор материала на основе сравнительного анализа наиболее важных характеристик и свойств. Материал сеток должен обладать следующими свойствами: высокой температурой плавления, хорошей теплопроводностью, максимальной работой выхода, хорошей технологичностью. Для изготовления электродов выбираем молибден, т.к. это один из наиболее подходящих материалов, отвечающий перечисленным требованиям.
При конструировании электродов ИОС необходимо выполнять следующие требования:
1. Конструкция должна обеспечивать минимальное изменение величины межэлектродного зазора. В процессе работы ПИД число высоковольтных пробоев должно быть сведено к минимуму.
2. Масса конструкции должна быть минимальной.
3. Резонансная частота сетки должна быть больше 200Гц.
Последнее требование вызвано наличием вибрационных нагрузок, которые испытывает КА при старте с Земли, при выходе на орбиту. Уровень частот вибраций лежит в пределах 130-180 Гц.
4.4 Расчет параметров газоразрядной камеры ПИД
Одним из главных параметров
газоразрядной камеры является напряжение разряда ![]() .
Эта величина зависит от многих факторов и, прежде всего, от первого потенциала
ионизации рабочего тела φi. В идеальном случае:
.
Эта величина зависит от многих факторов и, прежде всего, от первого потенциала
ионизации рабочего тела φi. В идеальном случае:
![]() (4.14)
(4.14)
где ![]() -
работа выхода электрона из материала катода;
-
работа выхода электрона из материала катода; ![]() -
потенциал ионизации рабочего тела, в нашем случае Xe (
-
потенциал ионизации рабочего тела, в нашем случае Xe (![]() =12,13 эВ) [3].
=12,13 эВ) [3].
Однако в реальных системах существуют различные потери, которые требуют увеличения мощности, вкладываемой в разряд, например потери на неупругие соударения, происходящие в результате возбуждения и последующего высвечивания, и перенос энергии электронами к аноду. Другим видом потерь является рекомбинация ионов плазмы на внутренних поверхностях ГРК и последующая ионизация образовавшихся нейтральных атомов. С учётом выше описанного и результатов экспериментальных исследований различных моделей ПИД можно сделать следующий вывод:
![]()
![]() 48,52 эВ (4.15)
48,52 эВ (4.15)
Аналогичное выражение можно вывести для величины разрядного тока Ip, основываясь на экспериментальной связи разрядного тока с током ионного пучка:
![]()
![]() А (4.16)
А (4.16)
Зная ![]() и
и
![]() , по формуле (3.2) [2]
рассчитывается цена иона
, по формуле (3.2) [2]
рассчитывается цена иона ![]() .
Оптимальный уровень величины
.
Оптимальный уровень величины ![]() , лежит
в диапазоне 160…240 эВ/ион, причём нижний уровень характерен для рабочих тел с
невысоким потенциалом ионизации (например, цезий, ртуть).
, лежит
в диапазоне 160…240 эВ/ион, причём нижний уровень характерен для рабочих тел с
невысоким потенциалом ионизации (например, цезий, ртуть).
![]()
![]() 194,08 эВ/ион (4.17)
194,08 эВ/ион (4.17)
Одним из важных узлов ГРК является
катодный узел. Общие требования, предъявляемые к катодам: катод должен быть
сконструирован и изготовлен так, чтобы он обеспечивал необходимый электронный
ток ![]() в течение всего времени
работы движителя. В предположении малости ионного тока на анод можно записать,
что [2]:
в течение всего времени
работы движителя. В предположении малости ионного тока на анод можно записать,
что [2]:
![]()
![]() А (4.18)
А (4.18)
где Iе – электронный ток с катода;
Iр – разрядный ток;
Ii – ионный ток пучка.
Стабильность работы катода в течение длительного времени для ПИД является проблемой, которая полностью не решена. Ресурс наиболее доведённых катодов составляет 10000 ч. Однако к концу ресурса энергетический КПД, как правило, ухудшается на 20% [2].
Вторым электродом (положительным) в
разрядной системе является анод. Анод обычно имеет форму диска, цилиндра или
конуса. Его конструкция и местоположение зависят от типа ГРК. При
конструировании ПИД необходимо знать тепловые характеристики ПИД для того,
чтобы правильно выбрать материалы, из которых изготавливаются различные узлы
движителя и сконструировать отдельные детали движителя и поверхности их
контакта. При определении отдельных конструктивных и рабочих характеристик ПИД
(например, при расчёте величины индукции магнитного поля) необходимо знать
параметры плазмы в объёме ГРК. Для определения плотности тока ![]() и плотности ионов
и плотности ионов ![]() , а также плотности
электронов
, а также плотности
электронов ![]() , необходимо знать
температуру максвелловских электронов (ионов) и температуру первичных
электронов (ионизирующих р.т.), и используя бомовский критерий устойчивости и
уравнение неразрывности для ионов, определяется средняя плотность плазмы.
Бомовский критерий устанавливает минимальную энергию иона, необходимую для
формирования устойчивого слоя. При нормальной работе движителя слои устойчивы,
поэтому можно ожидать выполнения критерия:
, необходимо знать
температуру максвелловских электронов (ионов) и температуру первичных
электронов (ионизирующих р.т.), и используя бомовский критерий устойчивости и
уравнение неразрывности для ионов, определяется средняя плотность плазмы.
Бомовский критерий устанавливает минимальную энергию иона, необходимую для
формирования устойчивого слоя. При нормальной работе движителя слои устойчивы,
поэтому можно ожидать выполнения критерия:
![]() (4.19)
(4.19)
Используя равенство (1.29) определим скорость ионов в ГРК, что позволит в дальнейшем провести расчёт магнитного поля движителя:

![]()
![]() , (4.20)
, (4.20)
где ![]() -
масса иона (
-
масса иона (![]() [3]);
[3]);
![]() - постоянная Больцмана (
- постоянная Больцмана (![]() Дж/град. [3]);
Дж/град. [3]);
![]() - скорость иона в ГРК, м/с;
- скорость иона в ГРК, м/с;
![]() - температура первичных электронов (
- температура первичных электронов (![]() , где
, где ![]() эВ – потенциал ионизации
рабочего тела, известно, что 1эВ=11600 к, тогда
эВ – потенциал ионизации
рабочего тела, известно, что 1эВ=11600 к, тогда ![]() 140708
К [3]).
140708
К [3]).
Используя закон сохранения энергии определим скорость электронов в ГРК движителя:

![]()
![]() , (4.21)
, (4.21)
где ![]() -
масса электрона (
-
масса электрона (![]() [3]);
[3]);
![]() - скорость электронов в ГРК, м/с;
- скорость электронов в ГРК, м/с;
![]() - температура группы медленных
максвеловских электронов (
- температура группы медленных
максвеловских электронов (![]() , где
, где ![]() эВ – первый потенциал
возбуждения рабочего тела, известно, что 1эВ=11600 к, тогда
эВ – первый потенциал
возбуждения рабочего тела, известно, что 1эВ=11600 к, тогда ![]() 98020 К [3]).
98020 К [3]).
Используя уравнение ![]() , где
, где ![]() - плотность ионов
(электронов) в ГРК, а
- плотность ионов
(электронов) в ГРК, а ![]() - скорость ионов
(электронов) в ГРК движителя, и используя уравнения (4.20 и 4.21), можем
определить плотность ионов и плотность электронов в ГРК движителя:
- скорость ионов
(электронов) в ГРК движителя, и используя уравнения (4.20 и 4.21), можем
определить плотность ионов и плотность электронов в ГРК движителя:
![]()
![]() (4.22)
(4.22)
![]()
![]() (4.23)
(4.23)
Таким образом, в результате расчётов определены параметры разряда плазмы в ГРК:
1.
Напряжение
разряда в ГРК, ![]() =48,52 эВ;
=48,52 эВ;
2.
Разрядный ток в
ГРК, ![]() =5,36 А;
=5,36 А;
3.
Цена иона, ![]() =194,08 эВ/ион;
=194,08 эВ/ион;
4.
Электронный ток с
катода, ![]() =6,7 А;
=6,7 А;
5.
Плотность ионов,
количество ионов в единице объёма, ![]() 1/
1/![]()
6.
Плотность
электронов, т. е. количество электронов в единице объёма, ![]() ;
;
Для обеспечения работы ПИД в течение необходимого времени ЭРДУ должна включать в себя запас рабочего тела. Для того чтобы определить этот запас, необходимо знать расход рабочего тела через движитель. Частично ответ на этот вопрос может дать величина ионного тока. Однако не весь расход, превращаясь в ионы, покидает движитель в виде ионной струи. Часть нейтральных атомов рабочего тела не ионизируется в ГРК и проходит через электроды ИОС. Величиной, характеризующей степень полноты использования рабочего тела, является hм, или коэффициент использования рабочего тела. Реально достигнутый диапазон hм лежит в пределах 0,8¸0,9 [1]. Коэффициент использования рабочего тела можно определить из графика зависимости Сi(hм) [1], он равен 0,9.
4.5 Расчёт магнитного поля в ПИД
Наиболее важным фактором, определяющим работу ГРК ПИД, является магнитное поле, его величина, форма силовых линий. Основная роль магнитного поля – увеличить время существования электронов, что улучшает энергетический КПД ГРК. Кроме того, магнитное поле оказывает влияние на распределение плотности плазмы по сечению движителя перед экранным электродом ИОС.
Однородная плотность тока по сечению движителя является одним из условий получения максимальной тяги, которая реализуется при работе всех отверстий электродов ИОС при условиях максимального тока насыщения. Однородность ионного пучка необходима для устранения локальной эрозии сетки ускорителя. Интенсивность эрозии электродов ИОС является функцией скорости резонансной перезарядки, которая пропорциональна местной плотности ионного тока. Для большинства ПИД характерной является пиковая плотность потока и, как следствие, максимальная эрозия электродов по оси движителя.
Исследования профиля ионного пучка в моделях ПИД с осевым магнитным полем показали, что в пучке существует центральная область высокой интенсивности, образованная плотным плазменным столбом, расположенным вдоль оси ГРК. Размер этого столба в области пересечения с экранным электродом (т.е. в том месте, где экстрагируются ионы) определяется диаметром катода, индукцией и формой силовых линий магнитного поля.
Для уменьшения градиента плотности плазмы в радиальном направлении можно использовать, по крайней мере, четыре метода. Первый метод – увеличение площади, с которой эмитируются электроны за счет увеличения площади катода, либо несколькими катодами малого размера, что усложняет систему и увеличивает потери мощности. Второй метод – использование в конструкции дефлектора, что ведёт к механическому усложнению конструкции, затруднению зажигания разряда и увеличению напряжения его горения. Третий метод – изменение формы силовых линий магнитного поля таким образом, чтобы распределение плотности плазмы вдоль экранного электрода было более однородным. Четвёртый метод – освобождение объёма ГРК от силовых линий магнитного поля и сосредоточения их в пристеночных областях.
Наиболее применяемые конструкции – это движители с расходящимся магнитным полем, радиальным и пристеночным (так называемые мультипольные).
Движитель с расходящимся магнитным полем – наиболее отработанная модель. Она появилась в результате развития конструкции движителя с осевым магнитным полем. При отработке этой модели было выявлено важное правило проектирования магнитных полей в объёме ГРК: критические силовые линии магнитного поля, т.е. линии, выходящие из крайних отверстий катодного блока, не должны пересекать анод и экранный электрод. Однако в моделях ПИД с расходящимся магнитным полем не было достигнуто однородности в распределении плотности тока по сечению. Вместе с тем существует конструкция с осевым магнитным полем, индукция которого зависит от радиуса так, что она (индукция) мала в центре камеры и возрастает по мере приближения к аноду. Такая структура поля даёт электронам возможность двигаться по траектории большего радиуса, но заставляет их отражаться обратно, когда они достигают анода. Более однородное распределение плотности ионного тока было получено у моделей ПИД с радиальным магнитным полем. Поскольку коэффициент диффузии в направлении, параллельном линиям магнитного поля, является намного большим, чем при нормальном, такая компоновка должна уменьшить градиент плотности плазмы по радиусу. Магнитное поле движителей с пристеночным магнитным полем сосредоточено у стенок. Его силовые линии закрывают аноды, препятствуя быстрому прохождению электронов к аноду. Поля рассеяния быстро спадают по мере удаления от полюсных наконечников, и напряжённость магнитного поля становится пренебрежимо малой во всём объёме ГРК. Выполнение этого условия обеспечивает свободное прохождение первичных электронов, испускаемых катодом и создание однородной плазмы.
При проектировании магнитных систем ПИД необходимо учитывать, прежде всего, два момента: первый – критические силовые линии магнитного поля не должны пересекать анод и рабочую часть экранного электрода ИОС, второй – величина индукции магнитного поля должна быть такой, чтобы ларморовский радиус первичных электронов был значительно меньше характерного размера, а ларморовский радиус первичных ионов был больше характерного размера, т.е. должно выполнятся следующее условие:
![]()
![]() (4.20)
(4.20)
Зная диаметр разрядной камеры (диаметр ИОС) и исходя из опыта использования ПИД, было установлено, что наиболее целесообразно применять движители, у которых длина ГРК составляет порядка от 0,3 до 0,2 диаметра ИОС.
![]()
![]()
![]() . 4.21)
. 4.21)
Используя уравнение для определения силы Лоренца и второй
закон Ньютона, а, также задавшись ларморовским радиусом ионов, приняв
ларморовский радиус ионов на порядок больше чем характерный размер камеры ![]() м, определим необходимую индукцию
магнитного поля:
м, определим необходимую индукцию
магнитного поля:
![]() (4.22)
(4.22)
Следовательно, индукция магнитного поля будет определяться как:
![]()
![]()
![]() . (4.23)
. (4.23)
Определив необходимую индукцию магнитного поля, рассчитывается ларморовский радиус электронов:
![]()
![]()
![]() . (4.24)
. (4.24)
После определения ларморовского радиуса электронов и ионов, проверяется условие (4.20), если оно выполняется, то расчет проведён правильно.
Исходя из того, что распределение плотности ионного тока у моделей ПИД с радиальным магнитным полем более однородно, чем у движителя с расходящимся или осевым магнитным полем, а, также учитывая, что создание движителя с пристеночным магнитным полем (мультипольное магнитное поле) достаточно сложно с технологической точки зрения, по сравнению с созданием движителя с радиальным магнитным полем. Учтя всё выше сказанное, для проектируемого ПИД, выбирается схема с радиальным магнитным полем. На рисунке 4.2 приведена расчётная схема магнитной цепи для радиального поля.
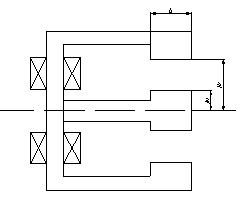
Рисунок 4.2. Расчётная схема магнитной цепи для радиального поля.
Существует две схемы радиального магнитного поля в ПИД: с внешними магнитными полюсами (т.е. магнитный полюс находится за стенкой ГРК, а материал ГРК камеры подбирается магнитопроводящим) и со встроенными полюсами (т.е. магнитный полюс встроен в стенку ГРК). В данном проекте выбирается схема магнитной цепи с внешними полюсами, следовательно, расстояние от оси движителя до полюсных наконечников будет определяться как:
![]()
![]()
![]() . (4.25)
. (4.25)
где ![]() - ширина полюсного наконечника.
- ширина полюсного наконечника.
Исходя из опыта применения полых катодов в ПИД, а, также используя рекомендации, предложенные в методическом пособии, рассчитывается радиус наконечника катода, и ширина полюсных наконечников:
![]()
![]()
![]() . (4.26)
. (4.26)
![]() ,
, ![]()
![]() . (4.27)
. (4.27)
Ширина полюсных наконечников принимается равной от 2 до 5 ларморовских радиусов электрона, так как это позволяет обеспечить минимум два соударения электрона с ионизируемым рабочем телом, что позволяет обеспечить более высокую плотность ионов на входе ИОС, а, следовательно, и большую тягу движителя, также выбор по такому критерию ширины полюсного наконечника увеличивает время жизни электрона.
Таким образом, используя закон Ома для магнитной цепи, определим число ампер-витков необходимые для создания магнитного поля в объёме ГРК с индукцией В:
![]() (4.28)
(4.28)
![]() (4.29)
(4.29)
где ![]() - магнитная
проницаемость среды (
- магнитная
проницаемость среды (![]() ).
).
Для дальнейшего расчёта магнитного поля ПИД необходимо выбрать материал для катушек соленоида и диаметр провода. Как правило, в промышленности используют проводники из алюминия или меди. Определяющими критериями в выборе материала являются его плотность и электропроводность, так как плотность меди в 3-2 раза выше плотности алюминия, поэтому при равных размерах катушка с обмоткой из алюминия оказывается значительно легче, чем катушка из меди. Однако электропроводность алюминия составляет только 60% электропроводности меди, поэтому мощность, потребляемая катушкой из алюминия, в 1,67 раза превышает мощность, потребляемую катушкой из меди, создающей то же поле, если размеры катушки одинаковы. Исходя из всего сказанного выше и учитывая повышенные требования, предъявляемые к энергопотреблению движителя, проводник для катушки выбираем диаметром один миллиметр из меди. По рекомендациям, предложенным в методическом пособии [2], плотность тока в сечение проволоки катушки принимаем равной 3А/мм2, тогда ток, протекающий в катушке соленоида, будет определяться как произведение плотности тока на площадь сечения проволоки:
![]()
![]()
![]() (4.30)
(4.30)
Таким образом, определив ток и задавшись диаметром проволоки соленоида, и зная суммарное число ампер витков, можно сначала определить суммарное число витков соленоида, которое обеспечит необходимую индукцию магнитного поля, а затем, задавшись числом катушек (так для более равномерного распределения магнитного поля в ГРК ПИД и для упрощения конструкции ПИД принимаем число катушек равным шести (n=6).
![]()
![]() (4.31)
(4.31)
определим число витков одной катушки:
![]()
![]() (4.32)
(4.32)
· По результатами расчёта магнитного поля определены следующие величины:
·
Индукция магнитного
поля, ![]() Тл;
Тл;
·
Геометрические
параметры магнитной системы, ![]() м,
м, ![]() м,
м, ![]() м;
м;
·
Ток катушки, ![]() А;
А;
·
Суммарное число
ампер-витков, ![]() ;
;
·
Число катушек, ![]() ;
;
·
Число витков в
одной катушке, ![]() .
.
5 Разработка и описание теоретического чертежа двигателя
Плазменный ионный движитель представляет собой устройство, в котором создание тяги основано на принципе ускорения заряженных частиц.
Общий вид плазменного-ионного двигателя представлен на чертеже ХАИ.06.441п.11.TЧ.04. Заряженные частицы образуются в части движителя, которая называется газоразрядной камерой (ГРК) (6). В состав ГРК входят катодный узел (13), анод (1), и непосредственно корпус газоразрядной камеры (6). Из анода через отверстия коллектора (3) в ГРК поступает рабочее тело - газ (Xe). Из катодного узла (13) в ГРК испускаются электроны. Происходит процесс, т. н. «ионизация ударом» при котором электроны сталкиваются с нейтральными частицами РТ и придают им положительный заряд. Для контроля над процессом ионизации и увеличения коэффициента полезного действия движителя в конструкцию введены дополнительные элементы — магнитопровод (10) и полюсный наконечник (18), которые составляют магнитную систему. Магнитная система создает в ГРК магнитное поле, генерируемое катушками индуктивности (17), которое удерживает электроны в зоне ионизации и не позволяет им оседать на стенки камеры.
Процесс ускорения заряженных частиц осуществляется при помощи ионно- оптической системы ИОС. ИОС представляет собой два разноименно заряженных электрода. Наружный электрод (5) (т. е. ускоряющий электрод) заряжен отрицательно, именно благодаря ему происходит ускорение. Ионы ускоряются электростатическим полем с разностью потенциалов ~ 500 В.
На срезе движителя имеется катод - компенсатор (2), установленный на специальном кронштейне. Задача катода-компенсатора - понижение объемного заряда и нейтрализация ионного пучка на срезе движителя. К катоду-компенсатору подается газ, в катоде образуются электроны, которые и нейтрализуют положительно заряженные ионы. Рабочее тело на анод подается по трубке. Напряжение на элементы ГРК подается по электропроводам. Изоляторы предотвращают возникновение замыкания в ГРК ПИД.
6 Расчёт системы хранения и подачи рабочего
тела
Функциональная схема системы электропитания ПИД представлена на чертеже ХАИ.06.441п.11.СГ.06. Блок системы подачи и хранения рабочего тела предназначен для хранения и подготовки соответствующего фазового состояния, а также для дозировки и подачи рабочего вещества в движитель.
Система хранения и подачи состоит из трёх основных частей:
· а) система хранения;
· б) система дросселирования;
· в) система регулирования и распределения.
Система хранения обеспечивает сохранение рабочего вещества в определённом фазовом состоянии с момента заправки в течение всего срока хранения и эксплуатации ДУ в заданных условиях.
Система дросселирования служит для снижения давления рабочего вещества, поступающего из бака, до определённого уровня и поддержания его на этом уровне в заданных пределах.
Система регулирования и распределения предназначена для обеспечения заданного расхода вещества и подачи его в движитель.
Основными элементами системы хранения являются:
· а) бак, представляющий собой ёмкость сферической формы и предназначенный для хранения рабочего вещества;
· б) заправочная горловина – устройство для заправки и слива рабочего вещества;
· в) датчик давления – прибор, контролирующий давление рабочего вещества в баке;
· г) пироклапан отсекает систему хранения от системы подачи до начала эксплуатации.
Система дросселирования включает:
· а) жиклер, предназначенный для понижения давления до заданного значения;
· б) ресивер – промежуточная ёмкость в магистрали подачи, в которой поддерживается давление рабочего вещества на заданном определённом уровне;
· в) электроклапан, поддерживающий предельно допустимое давление в ресивере.
Система регулирования рабочего вещества состоит из следующих элементов:
· а) жиклёров, электроклапанов, и термодросселей, обеспечивающих заданные расходы в элементы движителя;
· б) электроклапана (ЭК3), предназначенного для стравления воздуха перед началом работы двигателя.
Так как в данной работе учитывается резервирование двигателей. то в СХПРТ предусмотрено две системы подачи рабочего тела отдельно для каждого двигателя.
Расчет системы хранения и подачи рабочего вещества проводим по методическому пособию [3].
6.2 Определение основных параметров бака для хранения рабочего вещества
Бак рабочего вещества по своему размеру и массе составляет наибольшую часть движительной установки. Требования к материалу и конструкции бака определяются видом выбранного рабочего вещества и схемой системы подачи.
Основные требования к баку:
а) малая масса;
б) прочность;
в) герметичность;
г) коррозионная стойкость;
д) совместимость с выбранным рабочим веществом.
Запишем уравнение состояния газа, учитывая то, что газ при заправке находился под давлением Ро и температуре То:
 (6.1)
(6.1)
R=8.31 Дж·М/К– универсальная газовая постояння.
Определим из формулы (6.1) объем бака, т.е. объем рабочего тела Vо, приняв значение Ро=5·106 Па (т.к. не должно превышать критическое давление Ркр) и То=293 К (температура при нормальных условиях):
![]()
![]()
Зная объем бака, найдем его диаметр dб:
 (6.2)
(6.2)
Если изменились условия хранения газа в баке (т.е. То выросла до Тmax), то уравнение состояния газа примет следующий вид:
Разделив уравнения состояния для двух случаев (Р=Рmax, Т=Тmax и Р=Ро, Т=То) друг на друга получим:
 (6.3)
(6.3)
Величину максимальной температуры Тmax примем равную 400 К.
Зная величину Тmax, определяем Рmax:
![]() (6.4)
(6.4)
![]() Па.
Па.
Напряжения, возникающие в стенках бака из-за давления Р, определяются по формуле:
 . (6.5)
. (6.5)
Максимальные напряжения будут возникать в стенках бака при Р=Рmax:
 (6.6)
(6.6)
Зная [σ] (в качестве материала, из которого
изготавливается бак, выбираем титановый сплав ВТ5, для него степень черноты
равна 0,63 [3], допускаемое напряжение (условный предел текучести) – [σ]=800
МПа) и учитывая то, что ![]() ≤[σ],
вычисляем минимальную толщину стенки бака:
≤[σ],
вычисляем минимальную толщину стенки бака:
![]() , (6.7)
, (6.7)
где ![]() - коэффициент запаса.
- коэффициент запаса.
Для обеспечения
достаточной жесткости, чтобы использовать бак, как силовой элемент конструкции
СХПРТ, принимаем, с учетом коэффициента запаса прочности  (для сферы), принимаем
(для сферы), принимаем ![]() , тогда
, тогда ![]()
Масса конструкции бака равна:
![]() (6.8)
(6.8)
![]() .
.
Масса заправленного газом бака равна:
![]() (6.9)
(6.9)
![]()
Важной характеристикой для СХПРТ, является коэффициент складирования, который показывает, во сколько раз масса заправленного бака больше массы хранящегося в нём рабочего тела.
![]()
![]()
Лучшей конструкцией бака считается конструкция, у которой γ принимает наименьшее значение.
Следует учесть то, что в использованных формулах мы пренебрегали изменением объема бака при расширении материала его конструкции при нагревании.
Рассчитанная ёмкость для хранения р.т. имеет следующие конструктивные параметры:
1. Сферическая форма бака;
2.
Масса бака ![]()
![]() ;
;
3.
Масса
заправленного бака ![]()
![]() ;
;
4.
Коэффициент
складирования ![]()
5. Рабочее тело хранится в газообразном состоянии.
6.3 Расчет проектных параметров ресивера
Ресивер служит для сглаживания пульсаций давления при подаче рабочего тела из бака и стабилизации параметров газа в магистрали.
Из бака газообразное рабочее тело поступает в ресивер. Перед ресивером стоит электроклапан, который при открытии открывает доступ газу в ресивер. Электроклапан открывается в том случае, когда давление газа в ресивере упало ниже установленного значения и открывает доступ газу. Как только давление в ресивере достигнет требуемой величины, электроклапан закрывается. Давление в ресивере устанавливается всегда таким, чтобы оно было всегда выше давления в движителе. Величина Pрес min задается системой управления для обеспечения расхода рабочего тела с заданной точностью. Система управления задает работу СХПРТ таким образом, чтобы ΔМрес/Мрес<< 1. При постоянном расходе рабочего тела давление в системе все время меняется.
При работе движителя, как правило, необходимо выполнение условия m•эд=const.
Масса рабочего тела в ресивере:
 . (6.10)
. (6.10)
При m•эд=const получаем:
![]() (6.11)
(6.11)
Время цикла tцикла определяется следующим образом. Из технического задания известно общее время работы движительной установки. Электроклапан перед ресивером имеет гарантированное изготовителем число включений и выключений nвкл, которое, как правило, равно 10000. Учитывая это, получим:
![]() (6.12)
(6.12)
![]()
Тогда определим величину ∆Мрес:
![]() (6.13)
(6.13)
![]()
Выработка из ресивера рабочего тела α за один цикл составляет:
 (6.14)
(6.14)
Как показывают экспериментальные исследования величина α, как правило, не должна превышать 3%. Примем максимальное значение α=0,03.
 Тогда
имеем:
Тогда
имеем:
![]()
Уравнение состояния газа в ресивере запишется следующим образом:
 . (6.15)
. (6.15)
Примем Трес=293 К. Давление в ресивере обычно составляет ~ 2ּ105 Па.
Определим объем ресивера:
![]() (6.16)
(6.16)
Зная геометрическую форму бака, подбираем геометрическую форму ресивера. Форма резервуара ресивера должна быть такой, чтобы компоновочная схема СХПРТ занимала наименьший объём на КЛА. Для бака сферической конфигурации наиболее целесообразно применять ресивер, имеющий конфигурацию тора.
Для определения геометрических параметров тора, необходим выбрать меньший радиус тора, а больший радиус тора будет определяться как функция объёма и выбранного меньшего радиуса тора. Малый радиус тора выбираем равным половине радиуса сферы бака, что позволит сделать наиболее компактную компоновку СХПРТ.
Объем тора определяется как:
![]() (6.17)
(6.17)
Рисунок 6.1 Параметры тора.
![]() , (6.18)
, (6.18)
где ![]() - диаметр
сечения тора,
- диаметр
сечения тора, ![]() - малый радиус
тора.
- малый радиус
тора.
![]() . (6.19)
. (6.19)
Преобразовав уравнение (2.18), получим квадратное уравнение относительно диаметра сечения тора:
![]() . (6.20)
. (6.20)
Малый радиус тора принимается:
![]()
![]()
![]() (6.21)
(6.21)
Уравнение (2.21) имеет два корня: первый корень
отрицательный, второй корень равен ![]() .
.
Зная диаметр сечения тора и малый радиус тора, определяется большой радиус тора:
![]() . (2.23)
. (2.23)
6.4 Расчет проектных параметров термодросселя
Термодроссель применяют для регулирования требуемого расхода рабочего вещества. В нем используют зависимость расхода газа от его температуры при заданном перепаде давления и геометрических параметров капиллярной трубки. Температура газа, в свою очередь, зависит от значения тока, пропускаемого через трубку.
Секундный расход рабочего тела через термодроссель на анод определяется по формуле:
![]() , (6.22)
, (6.22)
где P – усредненное давление (![]() );
);
![]() - давление на входе в термодроссель;
- давление на входе в термодроссель;
![]() - давление на выходе из
термодросселя;
- давление на выходе из
термодросселя;
![]() - внутренний диаметр термодросселя;
- внутренний диаметр термодросселя;
![]() - разность давлений на входе и выходе
из термодросселя;
- разность давлений на входе и выходе
из термодросселя;
T – температура рабочего вещества в
термодросселе ( ![]() );
);
![]() - коэффициент вязкости ( для ксенона
- коэффициент вязкости ( для ксенона ![]() );
);
![]() - длина термодросселя (примем
- длина термодросселя (примем ![]() );
);
R – газовая постоянная для ксенона, R = 63.29 Дж/кг·К.
Давление на входе в
термодроссель равно давлению в ресивере ![]() . Для достижения необходимого
давления на выходе из термодросселя зададимся отношением:
. Для достижения необходимого
давления на выходе из термодросселя зададимся отношением:![]() . Отсюда давление на выходе
из термодросселя равно
. Отсюда давление на выходе
из термодросселя равно ![]() . Усредненное
давление равно:
. Усредненное
давление равно:
![]() (6.23)
(6.23)
Разность давлений равна: ![]()
Определим внутренний диаметр термодросселя:
 (6.24)
(6.24)
6.5 Расчет проектных параметров жиклера
Дальнейшее снижение давления в системе подачи происходит в жиклере, который представляет собой пластинчатую шайбу с отверстием.
Секундный расход рабочего тела через жиклер определяется по формуле:
 , (6.25)
, (6.25)
Sж – площадь поперечного сечения жиклера, приведенная площадь;
![]() - давление в жиклере (принимаем
давление на входе в жиклер
- давление в жиклере (принимаем
давление на входе в жиклер ![]() равным давлению на выходе из ресивера и равным
равным давлению на выходе из ресивера и равным ![]() );
);
k – коэффициент адиабаты (для ксенона k=1,67);
![]() - температура в жиклере (
- температура в жиклере ( ![]() );
);
R – газовая постоянная для ксенона, R = 63.29 Дж/кг·К.
С учетом того, что 90% рабочего вещества поступает в ГРК, а остальные 10% - на катод, имеем:
![]() кг/с,
кг/с,
Приведенная площадь жиклера находится по формуле:
 . (6.26)
. (6.26)

![]() м2 .(6.27)
м2 .(6.27)
Определим диаметр жиклера:
![]() .(6.28)
.(6.28)
Из технологических соображений диаметр жиклера принимаем равным 3мм.
7 Описание функциональной схемы системы электропитания ПИД
На чертеже (ХАИ.06.441п.11.СГ.05) представлена система электропитания (СЭП), основной задачей которой является поддержание работы ЭРД и систем, обеспечивающих его функционирование. На этом рисунке без раскрытия внутренней структуры каналов электропитания приведен общий принцип построения СЭП.
Так все каналы электропитания по входу подключены к общей выходной шине СЭС, от которой они получают электроэнергию. Сигналы, управляющие их работой, поступают с шины обмена информацией с СУ, а точнее с контроллером СЭП, входящим в состав СУ.
Основными датчиками, позволяющими СУ контролировать работу СЭП (а точнее работу отдельных КЭП и их нагрузки) являются датчики тока и напряжения (ДТН), устанавливаемые на выходе каждого КЭП (эти датчики являются составной частью КЭП). Если нагрузкой КЭП является не один потребитель (нагрузка), а целая система однотипных нагрузок (например, датчики давления, установленные в СХПРТ, или такие исполнительные устройства, входящие в СХПРТ, как электроклапаны), то на выходе КЭП имеется совокупность коммутирующих устройств, управляемых сигналом СУ и в цепи каждой нагрузки устанавливаются свои датчики тока и/или напряжения, сигнал с которых подается на СУ.
Поскольку нагрузкой КЭП так же являются газоразрядные промежутки систем ЭРД (КК1, КК2, ОК, ГРК), то к тем же потребителям параллельно подводится напряжение с систем инициирования разряда (СИР), включение которых осуществляется по команде СУ, а результат работы оценивается по изменению тока и напряжения на выходе соответствующего КЭП.
8 РАЗРАБОТКА И ОПИСАНИЕ ТЕОРЕТИЧЕСКОГО ЧЕРТЕЖА ДВИГАТЕЛЬНОГО БЛОКА
Двигательная установка представляет собой совокупность системы хранения и подачи рабочего тела, системы электроснабжения и непосредственно движителя.
На рассматриваемом чертеже (ХАИ.06.441п.11.ТЧ.07.) представлены система хранения и подачи РТ и 2 плазменных ионных движителя.
К баку (1) прикручивается фильтр (2), пироклапан (3) с жиклером (4). Перед редуктором устанавливается электроклапан (5).
Торообразный ресивер (6) с помощью трубопровода подсоединяется к электроклапану (7). Трубопровод, с помощью разделителя разветвляется на четыре канала: электроклапан катода-компенсатора (1), электроклапан катода-компенсатора (2), жиклер основного катода (8), термодроссель анода (11). К баку (1) с помощью болтового соединения присоединяется корпус (16).
Заправка бака производится с помощью заправочного устройства (17).
К основанию корпуса присоединяется ПИД.
Задача катода-компенсатора (14) - понижение объемного заряда и нейтрализация ионного пучка на срезе движителя.
На корпусе (16) кроме четырех отверстий предназначенных для присоединения несущего кольца бака (1) имеется четыре отверстия для присоединения блока к несущей раме КА.
9 Разработка циклограммы энергопотребления
На чертеже (ДУ.06.441п.09.СХ.07.) представлена циклограмма нагрузки, которая характерезует зависимость мощности, потребляемой нагрузкой от времени на протяжении от некоего повторяющегося цикла.
Основные исходные данные для построения циклограммы заданы таблицей 9.1, в которой приведены значения электропотребления с учетом ЭРД.
Таблица 9.1.
|
|
0 | 880 | 925 | 1700 | 1725 | 2261 | 2740 | 2800 | 4940 | 5100 | 5400 | 5610 |
|
|
80 | 800 | 80 | 3241 | 2521 | 80 | 800 | 80 | 275 | 40 | 80 | 80 |
Период обращения КА по орбите определяем из соотношения:
 , (9.1)
, (9.1)
где a=h+Rз=400+6378=6778 км
Rз - радиус Земли.
kз=3.986*105 км2/с2 – гравитационный параметр Земли.
Максимальное время нахождения КА в тени находим из соотношения:

Время нахождения КА на освещенном участке орбиты:
![]() (9.2)
(9.2)
Включение двигателя осуществляем на световом участке орбиты. Время работы двигателя составляет 10% от времени существования КА, мощность двигателя равна N=2.44 кВт.
Определяем среднюю мощность нагрузки по формуле:
![]() . (9.3)
. (9.3)
Установленная мощность БФ (максимальная мощность, которую способна генерировать БФ при работе в номинальных условиях) равна:
![]() , (9.4)
, (9.4)
где ![]() .
.
Выводы
В данной работе была разработана двигательная установка для стабилизации параметров орбиты искусственного спутника Земли.
Спроектирована электрореактивная двигательная установка на базе плазменно-ионного движителя. В конструкторской части произведен расчет параметров и геометрических размеров плазменно-ионного движителя, выбранного в качестве исполнительного органа системы стабилизации параметров орбиты искусственного спутника Земли, предназначенного для наблюдения за поверхностью Земли. Произведен выбор системы хранения и подачи рабочего вещества (ксенона), расчет элементов системы (бак, ресивер, термодроссель, жиклер). В соответствии с расчетами разработаны теоретический чертеж ПИД и движительного блока, функциональные схемы двигателя, системы электропитания, системы подачи и хранения рабочего вещества, циклограмма нагрузки, схема размещения ЭРДУ на борту КА.
В рассчитанной курсовой работе были получены следующие важные характеристики и конструктивные параметры ПИД, которые соответствуют техническому заданию:
1.
Тяга ПИД ![]() 0,089 Н.
0,089 Н.
2.
КПД ПИД ![]() .
.
3.
Ускоряющая
разность потенциалов между экранным и ускоряющим электродом ![]() В.
В.
4.
Диаметр ИОС, ![]() 0.2
0.2 ![]() .
.
5. ПИД с радиальным магнитным полем.
6. В качестве рабочего вещества был выбран инертный газ ксенон.
Структурная схема энергосилового узла и основные геометрические размеры ЭРДУ приведены в приложении.
Перечень ссылок
1.”Оценочные расчеты параметров ракетно-космических систем”-методическое пособие, Безручко К.В., Белан Н.В., Губин С.В., Исаев С.В., Колесник В.П., Харьков.
2. ”Плазменно-ионные двигатели”-методическое пособие, Белан Н.В., Глибицкий М. М., Степанушкин Н.П., Харьков;
3. “Система подачи рабочих веществ”-методическое пособие, Белан Н.В., Коровкин В.Н., Маштылев Н.А.,Харьков,1990.
4. ”Детали машин и механизмов”, Мишарин В.А., Янтовский Е.И., Москва 1985-488 ст.;
5. ”Плазменно ионные двигатели”, учеб. пособие по курсовому и дипломному проектированию, Белан Н.В., Глибицкий М.М., Степанушкин Н.П., Харьков 1983-62ст.;
6. ”Справочник конструктора-машиностроителя”, 1-й т. 2-й т., Анурьев В.И., Москва 1979-560ст.;
7. ”Обработка металлов давлением”, Безручко И.И., Зубцов М.Е., Балакина И.М., Ленинград 1967-320ст.;
8. ”Определение припусков на механическую обработку и технологические расчеты”, В. Ю. Гранин, А. И. Долматов;
9.”Справочник технолога-машиностроителя”, Т1, Т2, под ред. Косилова А.Г., Мещерякова Г. К.
Приложение
ХАИ.441.06.КР.11.ПЗ.00.00 – пояснительная записка, 52 с.
ХАИ.441.06.КР.11.СГ.00.01 – циклограмма энергопотребления, А4.
ХАИ.441.06.КР.11.СХ.00.02 – схема размещения ЭРДУ на КА, А3.
ХАИ.441.06.КР.11.СГ.00.03 – функциональная схема ЭРДУ, А4.
ХАИ.441.06.КР.11.ТЧ.00.04 – теоретический чертеж двигателя, А1.
ХАИ.441.06.КР.11.СГ.00.05 – функциональная системы электропитания, А4.
ХАИ.441.06.КР.11.СГ.00.06 – функциональная схема СХПРТ, А3.
ХАИ.441.06.КР.11.ТЧ.00.07 – теоретический чертеж двигательной установки, А1.
| Общая и неорганическая химия | ||||||||||
|
Квантово-механическая модель атома. Квантовые числа. Атомные орбитали. Порядок заполнения орбиталей электронами Теория строения атома основана на ... Видно, что цинковый электрод отрицательный, т.е. служит источником электронов, которые идут по внешней цепи к медному электроду, где восстанавливаются ионы меди. Электрод называют катодом, если с его поверхности электроны металла переходят на частицы реагирующих веществ, которые при этом восстанавливаются. |
Раздел: Рефераты по химии Тип: учебное пособие |
| Лекции по твердотельной электронике | ||||||||||
|
Московский энергетический институт (технический университет) ТВЕРДОТЕЛЬНАЯ ЭЛЕКТРОНИКА Конспект лекций Москва, 2002 г. Содержание Лекция 1 5 1 ... Напротив в диэлектриках, как правило при комнатной температуре электронов очень мало и их проводимость, в основном носит ионный характер, поэтому она мала ѭ < 10-10 Ом-1см-1. В ... А - анод, К - катод, У - управляющий электрод. |
Раздел: Рефераты по радиоэлектронике Тип: реферат | |||||||||
|