Контрольная работа: Составление уравнений равновесия и расчет действующих сил
Задача С 1
Жестяная рама закреплена в точке А шарнирно, а в точке В прикреплена к шарнирной опоре на катках. На раму действуют пара сил с моментом М = 100H*м и две силы F1 = 10H под углом 30° к горизонтальной оси, приложенная к точке K, и F4=40H под углом 60° к горизонтальной оси, приложенная к точке H.
Определить реакции связей в точках A и В, вызываемые заданными нагрузками. При окончательных подсчетах принять l = 0,5 м
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() 2 l
l
2 l
l
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() Дано: XA F4’ X
Дано: XA F4’ X
М = 100 Н * м A H
![]()
![]()
![]()
![]()
![]()
![]() F 1 = 10 Н F4’’ F4 F1’’ F1 l
F 1 = 10 Н F4’’ F4 F1’’ F1 l
![]()
![]()
![]()
![]() £ 1= 30°
K
£ 1= 30°
K
![]()
![]() F 4 = 40 HF1’
F 4 = 40 HF1’
![]() L = 0,5 м М 3l
L = 0,5 м М 3l
£ 4 = 60° 2l
![]()
![]()
![]()
![]()
![]() RB
RB
![]()
![]() XА, YА, RB
Д
XА, YА, RB
Д
Рис. С 1.0.
Решение:
Рассмотрим равновесие
рамы. Проведем координатные оси XY (начало координат в точке А). На раму
действуют следующие силы: ![]() 1 и
1 и ![]() 4, пара сил моментом М и реакция
связи
4, пара сил моментом М и реакция
связи ![]() A,
A, ![]() A,
A, ![]() B (реакция
неподвижной шарнирной опоры А изображаем двумя ее составляющими, реакция
шарнирной опоры на катках направлена перпендикулярно опорной плоскости).
B (реакция
неподвижной шарнирной опоры А изображаем двумя ее составляющими, реакция
шарнирной опоры на катках направлена перпендикулярно опорной плоскости).
Составляем три уравнения равновесия:
1) ∑ FKX=0; XA+F4*coς 60 °+ F1*coς 30 °=0
2) ∑ FKY=0; YA-F4*ςin 60 °+ F1* ςin 30 °+RB=0
3) ∑ MA (FK)=0; -F4*ςin 60 °*2l+ F1* ςin 30 °*3l+F1* coς 30 °*l-M+RB*5l=0
Из уравнений (1) находим XA:
XA= -F4* coς 60 °-F1* coς 30 °= -40*0,5-10*0,866= -28,66H
Из уравнения (3) находим RB:
RB=![]() =
=
=![]() =
=
![]() =49,12H
=49,12H
Из уравнения (2) находим YA:
YA=
![]()
Проверка:
![]()
![]()
![]()
ð все силы реакции найдены правильно:
Ответ:
![]()
![]()
![]()
Задача С 2
Однородная прямоугольная
плита весом P=5kH со стороны АВ=3l, ВС=2l закреплена в точке А сферическим
шарниром, а в точке В цилиндрическим шарниром (подшипником) и удерживается в
равновесии невесомым стержнем СС! На плиту действуют пара сил с моментом
М=6лН*м, лежащая в плоскости плиты, и две силы. Значения этих сил, их
направления и точки приложения Н, £1=90°с, Д, £2=30°с; при этом силы ![]() и
и ![]() лежат в плоскостях, параллельных
плоскости xy, сила
лежат в плоскостях, параллельных
плоскости xy, сила![]() - в плоскости, параллельной xz,
сила
- в плоскости, параллельной xz,
сила ![]() - в
плоскости параллельной yz. Точки приложения Д и Н находятся в серединах сторон
плиты. Определить реакции связей в(.) А и В, С. При окончательных расчетах
принять l=0,5м.
- в
плоскости параллельной yz. Точки приложения Д и Н находятся в серединах сторон
плиты. Определить реакции связей в(.) А и В, С. При окончательных расчетах
принять l=0,5м.
![]() С1
С1
![]()
![]()
![]()
 Z
Z
![]() Дано:
Дано:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() Y
Y
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Рис С 2.0.
Решение:
1) Рассмотрим равновесие плиты. На нее
действуют заданные силы: ![]() пара сил с моментом М, а также
реакции связей. Реакцию сферического шарнира разложим на 3 составляющие:
пара сил с моментом М, а также
реакции связей. Реакцию сферического шарнира разложим на 3 составляющие: ![]() цилиндрического
шарнира (подшипника) - на две составляющие:
цилиндрического
шарнира (подшипника) - на две составляющие: ![]() (в плоскости перпендикулярной оси
подшипника), реакцию
(в плоскости перпендикулярной оси
подшипника), реакцию ![]() стержня направим вдоль стержня,
предполагая, что он растянут (рис. С 2.0.)
стержня направим вдоль стержня,
предполагая, что он растянут (рис. С 2.0.)
2) Для определения ![]() составляем равновесия,
действующей на плиту пространственной системы сил:
составляем равновесия,
действующей на плиту пространственной системы сил:
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
![]() (4)
(4)
![]() (5)
(5)
![]() (6)
(6)
Из уравнения (4) находим N:

Из уравнения (5) находим ZB:

Из уравнения (1) находим XA:
![]()
Из уравнения (6) находим YB^

Из уравнения (2) находим YA:
![]()
Из уравнения (3) находим ZA:
![]()
Ответ:
XA= -1,67kH
YA= -29,11kH
ZA= -0,10kH
YB=25,11kH
ZB=2,60kH
N= -5,39kH
Знаки указывают, что силы
![]() направлены
противоположно показанным на рис. С 2.0.
направлены
противоположно показанным на рис. С 2.0.
Задача К1
![]() Дано:
Дано:
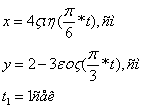
![]() Три движения точки на плоскости
Три движения точки на плоскости
Найти:
![]() - уравнение траектории точки
- уравнение траектории точки
![]() для момента времени
для момента времени
![]()
![]() y
y
B
![]()
x
Рис. К 1.0.
Решение:
1) Для определения уравнения траектории исключим из заданных уравнений движения время t:
![]() (1)
(1)
Преобразуя систему (1), получим:
 (2)
(2)
Поскольку время е входит в аргументы
тригометрических функций, где один аргумент вдвое больше другого, используем
формулу: ![]() то
есть:
то
есть:
![]()
Итак, получаем:
 (3)
(3)
Преобразуя систему (3), получим:
 (4)
(4)
Преобразуем: ![]()
Упрощая выражение, получим:
![]()
![]() (5)
(5)
Выражение (5) – это уравнение траектории точки. График – парабола с вершиной в точке (0;11) на рис. К.1.0 а
2) Скорость точки найдем по ее траектории на координатной оси:
 см/с
см/с
![]() y
y
 (0;11)
(0;11)
y=-0,375x2+11
![]()
(-5,4;0) (5,4;0)
![]() x
x
Рис. К 1.0 а
При t=1 сек, находим ![]()
![]()
![]()

При t=t1=1 сек, находим ![]()
![]()
Находим скорость точки:
![]()
3) Аналогично найдем уравнение точки:

При t=t1=1 сек, находим
При t=t1=1 сек, находим:
![]()
Находим ускорение точки:
![]()
Найдем касательное ускорение, дифференцируя по времени равенства:
![]()
Учитывая найденные значения ![]() при t= 1 сек,
получим:
при t= 1 сек,
получим:
![]()
5)Нормальное ускорение определяется по формуле:
![]()
6)Радиус кривизны траектории определяется по формуле:
![]()
Ответ:
![]()
a1=1,73 см/с2
aT=1,07 см/с2
an=1,36 cм/c2
![]() =7,53 см
=7,53 см
Задача К2
Дано:
![]() l1=0,4 м
l1=0,4 м
l2=1,2 м
l3=1,4 м
l4=0,8 м
![]() =60°
=60°
![]() =60°
=60°
![]() =60°
=60°
![]() =90°
=90°
![]() =120°
=120°
![]() 4=3с-2
4=3с-2
![]() =10с-2
=10с-2
![]()
Найти:
![]() -?
-?
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]() 2
2
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
O1
4
![]()
O2
Рис. К2.0.
Решение:
1) Строим положение данного механизма в соответствии с заданными узлами (рис К2.0)
2)
Определяем
скорость точки ![]() по формуле:
по формуле:
![]()
Точка ![]() одновременно
принадлежит стержню
одновременно
принадлежит стержню ![]()
![]() . Зная
. Зная ![]() и направление
и направление ![]() воспользуемся теоремой
о проекциях скоростей двух точек тела (стержня
воспользуемся теоремой
о проекциях скоростей двух точек тела (стержня ![]() ) на прямую, соединяющую эти точки
(прямая
) на прямую, соединяющую эти точки
(прямая ![]() )
)
Точка В одновременно принадлежит к стержню 3 те к стержню АВ. При помощи теоремы о проекциях скоростей определяем скорость точки А:
Для определения скорости точки D стержня АВ построим мгновенный центр скоростей для звенья АВ (рис. К 2.0)
Определяем угловую скорость звенья 3 по формуле:
Из треугольника АС3В при помощи теоремы синусов определяем С3В:
Т.О., угловая скорость стержня 3 равна:
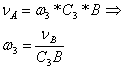
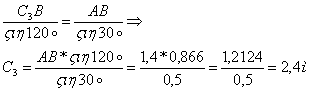
![]()
Скорость точки D стержня АВ определяется по формуле:
![]()
С3D определяем при помощи теоремы синусов:
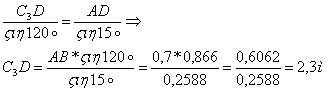
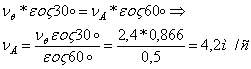
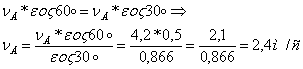
Итак: ![]() =
=![]()
Определяем ускорение точки А.
Т.к., угловая ускорение ![]() известно, то
известно, то
![]()
Найдем нормальное ускорение точки А определяем по формуле:
![]()
Ускорение точки А плоского механизма определяется по формуле:
![]()
Ответ:

Задача Д1
![]() Дано:
Дано:
m=2 кг
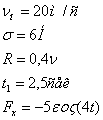
![]()
Найти:
x=f(t) – закон движения груза на участке ВС
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]() А
А
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
C ![]()
![]() В
В ![]()
![]()
![]() D
D ![]()
x 30°
![]()
Рис. D 1.0.
Решение:
1) Рассмотрим движение груза D на участке АВ, считая груз материальной точкой.
Изображаем груз (в произвольном положении) и действующее на него силы:
![]() . Проводим ось AZ в сторону
движения и составляем дифференциальное уравнение движения груза в проекции на
эту ось:
. Проводим ось AZ в сторону
движения и составляем дифференциальное уравнение движения груза в проекции на
эту ось:
![]() (1)
(1)
![]() (2)
(2)
Далее, находим:
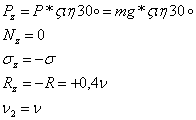 (3)
(3)
Учитывая выражение (3) в (2) получим:
![]() (4)
(4)
![]() (5)
(5)
Принимая g=10ми/с2 получим:
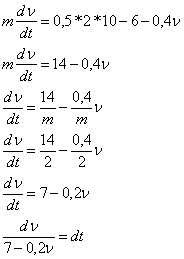
Интегрируем:
Начальные условия:
При t=0; ![]()
![]()
или
ln(7-0,2*![]() )= C1
)= C1
При t=t1=2,5сек, ![]() , получим:
, получим:
![]()
2)
Теперь рассмотрим
движение груза на участке ВС, найденная скорость ![]() будет для движения на этом участке
начальной скоростью
будет для движения на этом участке
начальной скоростью
![]()
Изображаем груз (в произвольном положении) и действующие на него силы:
![]() (рис. D1.0)
(рис. D1.0)
Проведем из точки В ось BX и составим дифференциальное уравнение движения груза в проекции на эту ось:
![]() (6)
(6)
Т.к., ![]() то уравнение (6) примет вид:
то уравнение (6) примет вид:
![]() (7)
(7)
Разделив обе части равенства на m=2 кг, получим
![]() (8)
(8)
![]() (9)
(9)
Умножим обе части уравнения (9) на ![]() и
проинтегрируя, получим:
и
проинтегрируя, получим:
Учитывая начальные условия:
При ![]()
![]()
Т.о., ![]()
Умножим обе части равенства на dt и снова интегрируем, получим:
Начальные условия: при ![]()
Итак:
![]()
Ответ:
![]()
Это закон движения груза D в изогнутой трубе АВС.
| Перевозка грузов на железнодорожном транспорте | |
|
... путей сообщения Кафедра: Коммерческая и грузовая работа Курсовая работа Дисциплина: Организация грузовой и коммерческой работы Тема: Перевозка грузов ... Перевозка грузов малой скоростью по железной дороге может осущевстляться контейнерами, мелкими, малотоннажными, повагонными, групповыми и маршрутными отправками. ный угол между плоскостью груза и горизонтальной плос- |
Раздел: Рефераты по экономике Тип: реферат |
| Проектирование строительства завода цинкования мелкоразмерных ... | |
|
Содержание 1. Задание 2. Введение 3. Общие исходные данные 4. Функционально-технологические условия 5.Технико-экономическое обоснование принятого ... Гибкость стержня относительно оси x: W1 - ветровая нагрузка, действующая параллельно плоскости, на которую установлен кран, на подветренную площадь груза, W1=50Па; |
Раздел: Рефераты по строительству Тип: дипломная работа |
| Механика, молекулярная физика и термодинамика | |
|
Министерство образования Российской Федерации Омский государственный технический университет МЕХАНИКА, МОЛЕКУЛЯРНАЯ ФИЗИКА И ТЕРМОДИНАМИКА Учебное ... 4.Тонкий однородный стержень длиной L=50 см и массой m=400 г вращается с угловым ускорением вокруг оси, проходящей перпендикулярно стержню через его середину. Найти работу подъема груза по наклонной плоскости, если масса груза 100 кг, длина наклонной плоскости 2 м, угол наклона 300, коэффициент трения 0,1 и груз движется с ускорением 1м ... |
Раздел: Рефераты по физике Тип: учебное пособие |
| Схема автоматического регулирования продолжительности выпечки с ... | |
|
СОДЕРЖАНИЕ 1. Технологическая часть 1.1 Анализ работы технологического процесса и описание производственной установки 1.2 Анализ работы оператора 1.3 ... Однако такие уравнения непосредственно нельзя решать совместно, поскольку переменные статора записаны в статорной системе координат, а переменные ротора (помечены верхним индексом ... В блоках 1, 2, 3 производится подача напряжения на пуско-регулирующую аппаратуру механизмов печи и электронагреватели (F1=1, F2=1, F3=1, F4=1, F5=1), задание температурного режима ... |
Раздел: Промышленность, производство Тип: дипломная работа |
| Грузы и их свойства | |
|
Содержание Введение 1. Грузы и их свойства 1.1 Характеристика грузов 1.2 Факторы, влияющие на свойства грузов 2. Технические требования и основные ... Использование средств пломбирования и индикации сокращает финансовые и временные потери, дисциплинирует персонал, увеличивает скорость обработки грузов, позволяет отслеживать груз ... Груз к перевозке должен быть подготовлен таким образом, чтобы были обеспечены сохранность и безопасность его перевозки, рациональное использование подвижного состава, ускорение ... |
Раздел: Промышленность, производство Тип: курсовая работа |