Лабораторная работа: Определение основных параметров автомобиля ЗИЛ-131
Федеральное агентство железнодорожного транспорта
Сибирский государственный университет путей сообщения
Кафедра “Механизация путевых, погрузочно-разгрузочных и строительных работ”
Расчетно-графическая работа по дисциплине
“Автомобили и тягачи”
Определение основных параметров автомобиля
АТ.М311.00.09.00.00.00.ПЗ
Разработал
студент гр. М-311
Стрижкин Е.В.
Руководитель
доцент
Сырямин Ю.Н.
2008
Содержание
1. Выбор прототипа и описание его общего устройства
2. Определение массы автомобиля
3. Выбор шин
4. Определение мощности двигателя
5. Построение внешней характеристики
6. Выбор передаточных чисел трансмиссии
7. Определение рабочего объема двигателя
8. Геометрические характеристики проходимости автомобиля
9. Построение динамической характеристики автомобиля
10. Построение графика ускорений автомобиля
11. Построение графика тормозного пути автомобиля
Список литературы
1. Выбор прототипа и описание его общего устройства
В качестве прототипа выбран автомобиль ЗИЛ-131 (рисунок 1).
ЗИЛ-131 - трехосный автомобиль, выпускается автомобильным заводом имени Лихачева. Кузов автомобиля – деревянная платформа с задним открывающимся бортом, боковые борта снабжены откидными скамейками Борта имеют гнезда для установки дуг тента. Кабина - трехместная цельнометаллическая. На автомобиле установлен карбюраторный, V - образный, четырехтактный, 8 – цилиндровый двигатель.[1]
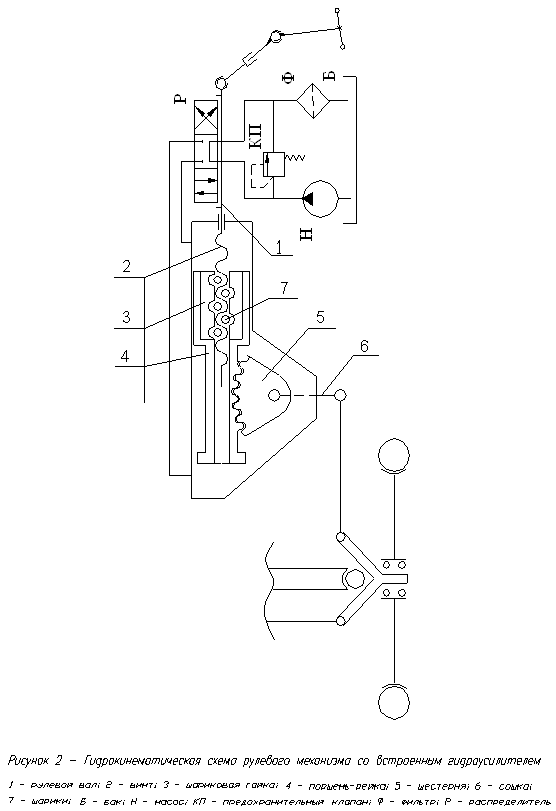
Трансмиссия механическая, многоступенчатая. В трансмиссии применена пятиступенчатая коробка передач, с пятью передачами для движения вперед и одной для движения назад, с двумя синхронизаторами инерционного типа для включения 2-ой и 3-ей, 4-ой и 5-ой передач. Передаточные числа: I - 7,44; II - 4,10; III - 2,29; IV - 1,47; V - 1,00; заднего хода - 7,09.[1] Кинематическая схема трансмиссии приведена на рисунке 2.
Сцепление - однодисковое, сухое, с пружинным гасителем крутильных колебаний.[1]
Рулевой механизм - с гидравлическим усилителем, расположенным в общем картере с рулевым механизмом; рабочая пара – винт с гайкой на циркулирующих шариках и рейка, зацепляющая с зубчатым сектором. Передаточное число рулевого механизма - 20.[1]
Рабочая тормозная система - колодочная, барабанного типа; действует на все колеса, привод пневматический. Стояночный тормоз – барабанного типа, действует на трансмиссию; привод механический.
Полная масса прототипа 6700 кг.[1]
Распределение массы по мостам:
На переднюю ось 3195 кг - это примерно 46% от полной массы,
На тележку 3505 кг - 54%.[1]
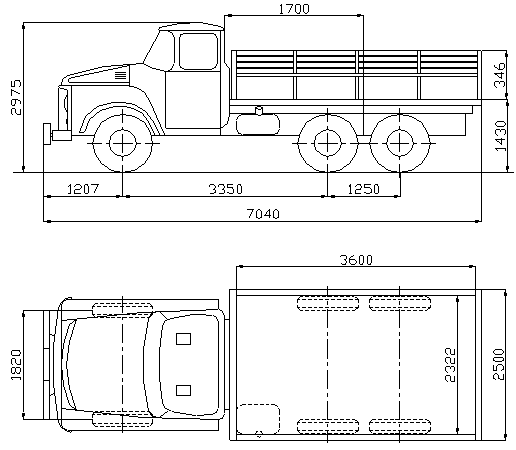
Рисунок 1 – Габаритные размеры автомобиля ЗИЛ-131
Работа рулевого управления со встроенным гидроусилителем:
Гидрокинематическая схема рулевого управления приведена на рисунке 3.
Рулевой вал 1, установленный в шариковых подшипниках, имеет на конце винт 2. На винте закреплена шариковая гайка 3, входящая в поршень-рейку 4. Поршень-рейка, которая одновременно является поршнем гидравлического усилителя и рейкой рулевого механизма, находится в зацеплении с зубчатым сектором 5, выполненным заодно с валом сошки 6. При повороте рулевого вала поршень-рейка перемещается внутри картера рулевого механизма. Осевое перемещение поршня рейки, имеющей на наружной поверхности зубья, вызывает поворот вала сошки, а следовательно, и управляемых колес. Для уменьшения трения в паре винт-гайка вместо обычной резьбы выполнены полукруглые винтовые канавки, в которые заложены шарики 7.
Картер рулевого механизма является одновременно цилиндром гидроусилителя. В гидросистему усилителя входят также лопастной насос, приводимый в действие от вала двигателя, бачок, фильтр, предохранительный клапан и распределитель. Распределитель состоит из корпуса, в котором расположен золотник, закрепленный на валу винта. Золотник с валом фиксируется в нейтральном положении пружинами с двумя реактивными плунжерами каждая. Длина золотника больше длины отверстия для него в корпусе распределителя, поэтому золотник и винт могут перемещаться в осевом направлении на 1 мм в каждую сторону от среднего положения.[1]
Гидроусилитель работает следующим образом. При прямолинейном движении машины золотник расположен в нейтральном положении, масло свободно перекачивается насосом в бачек, поскольку нагнетательная и сливная линии соединены между собой. При повороте машины, в случае повышенного сопротивления повороту управляемых колес – на винте возникает реактивное осевое усилие, сдвигающее винт. Вместе с винтом сдвигается золотник, преодолевая при этом усилие пружин, действующих на реактивные плунжеры. Это усилие передается на рулевое колесо. При этом одна из внутренних полостей цилиндра отключается, а в другую увеличивается подача масла. Давление масла в этой полости возрастает, и поршень-рейка, перемещаясь, поворачивает зубчатый сектор и вал рулевой сошки и через рулевой привод – колеса машины. При прекращении поворота золотник под действием реактивных плунжеров возвращается в нейтральное положение, и действие гидроусилителя прекращается.[1]
2. Определение массы автомобиля
Полная масса автомобиля ma , кг [2]:
![]() , (1)
, (1)
где mH - грузоподъемность автомобиля, кг (mH = 5200 кг); nб – коэффициент, учитывающий снаряжение автомобиля; mП – масса пассажира, кг (mП = 80 кг);
zП - число пассажиров (zП = 3).
 , (2)
, (2)
где ne - коэффициент использования массы, (ne = 1,7 [2]).
 .
.
![]() .
.
Масса порожнего автомобиля m0 , кг:
![]() , (3)
, (3)
![]() .
.
3. Выбор шин
Шины выбираются по
нагрузке на наиболее нагруженное колесо по ГОСТ 5513-84. Как правило, нагружают
больше ведущий мост с целью увеличения сцепления с дорогой. У грузовых
автомобилей с колесной схемой ![]() при полном использовании грузоподъемности
на переднюю ось приходится около 30% нагрузки. На задних осях автомобиля обычно
монтируют по две шины, каждая из которых может испытывать примерно такую же
нагрузку, как и шина переднего колеса. Все колеса автомобиля по конструкции
почти всегда одинаковы и взаимозаменяемы. Отличие может быть только во
внутреннем давлении в шинах.
при полном использовании грузоподъемности
на переднюю ось приходится около 30% нагрузки. На задних осях автомобиля обычно
монтируют по две шины, каждая из которых может испытывать примерно такую же
нагрузку, как и шина переднего колеса. Все колеса автомобиля по конструкции
почти всегда одинаковы и взаимозаменяемы. Отличие может быть только во
внутреннем давлении в шинах.
Нагрузка, приходящаяся на задние мосты mз , кг:
![]() , (4)
, (4)
где λ – коэффициент, учитывающий распределение нагрузки по осям (λ = 0,7).
![]() .
.
Нагрузка, приходящаяся на каждое колесо mв(1) , кг:
 . (5)
. (5)
Нагрузка, приходящаяся на передний мост mп , кг:
![]() , (6)
, (6)
![]() .
.
Нагрузка, приходящаяся на каждое колесо mп(1) , кг:
 . (7)
. (7)
Исходя из наибольшей нагрузки на каждое колесо по справочнику [3] приняты шины 260-508Р:
Таблица 1 – Основные параметры шины
| Обозначение шины | 260-508Р |
| Тип рисунка протектора | Универс. |
| Масса шины, кг | 60 |
| Норма слойности | 12 |
| Обозначение обода | 178 - 508 |
| Наружный диаметр, мм | 1020 ± 10 |
| Ширина профиля, мм | 262 |
| Статический радиус, мм | 476 ± 5 |
| Максимальная нагрузка, кгс | 2050 |
| Внутреннее давление в шине кгс/см2 | 6,5 |
| Максимальная допустимая скорость, км/ч | 100 |
4. Определение мощности двигателя
Мощность двигателя Pev , кВт должна быть достаточна для обеспечения заданной максимальной скорости движения Vmax по дороге с минимальным заданным коэффициентом сопротивления перекатыванию [2]:
 , (8)
, (8)
где Vmax – максимальная скорость, м/с (Vmax = 85 км/ч = 23,6 м/с); Ga – вес автомобиля, Н; f – коэффициент сопротивления перекатыванию kB – аэродинамический коэффициент обтекаемости, Н•с2/м4 (kB = 0,6 Н•с2/м4),
A - лобовая площадь автомобиля, м2; ηтр - КПД трансмиссии (ηтр = 0,9 [2]).
![]() , (9)
, (9)
где g – ускорение свободного падения, м/с2 (g = 9,8 м/с2).
![]() .
.
![]() , (10)
, (10)
![]() .
.
![]() , (11)
, (11)
где B – колея автомобиля, м (B = 1,82 м); H – высота автомобиля, м (H = 2,975 м).
![]() .
.

В общем случае частота вращения вала двигателя nmax при максимальной скорости движения не равна частоте вращения np , соответствующей максимальной мощности двигателя и следовательно, Pev ≠ Pmax [2].
Для нахождения максимальной мощности используется эмпирическая формула Лейдермана:
 , (12)
, (12)
где a, b- эмпирические коэффициенты аппроксимирующего перегрузочную ветвь внешней характеристики кубического трехчлена (a = 0,87, b = 1,13 – для дизельных двигателей [2]).
У современных ДВС отношение nmax / np = 1,2 [2].
![]() .
.
5. Построение внешней характеристики
Внешняя характеристика – графическая зависимость мощности и крутящего момента от частоты вращения коленчатого вала.
Задаваясь значениями ne , которые соответствуют отношениям ne /np = 0,2; 0,4; 0,6; 0,8; 1; 1,2, определяем величину соответствующих мощностей Pe , заносим их в таблицу и строим внешнюю характеристику ДВС.
Для построения внешней характеристики формула (12) записывается в следующем виде:
 , (13)
, (13)
где Pe – текущее значение мощности двигателя; ne – текущие значения частоты вращения коленвала; np – номинальная частота вращения (np = 3200 об/мин = 53 об/с).
Текущее значение крутящего момента:
 , (14)
, (14)
Значения, необходимые для построения внешней характеристики рассчитываются по формулам 13 и 14. Результаты приведены в таблице 2.
Таблица 2 – Расчет внешней характеристики
| Отношение ne /np | ||||||
| Показатели | 0,2 | 0,4 | 0,6 | 0,8 | 1,0 | 1,2 |
| ne , об/с | 10 | 20 | 30 | 40 | 50 | 60 |
|
|
62,8 | 125,6 | 188,4 | 251,2 | 314 | 376,8 |
|
|
18 | 40,6 | 62,3 | 81,3 | 93 | 91,1 |
|
|
287 | 323 | 331 | 334 | 279 | 242 |
Внешняя характеристика представлена на рисунке 4.
6. Выбор передаточных чисел трансмиссии
Передаточное отношение главной передачи iгл определяется из условия обеспечения заданной максимальной скорости Vmax :
 , (15)
, (15)
где nmax – максимальная частота вращения коленчатого вала, об/с (nmax = 60 об/с); rк – радиус колеса, м (rк = 0,476 м);Vmax – максимальная скорость, м/с (Vmax = 23,6 м/с); iкв – передаточное число КПП на высшей передаче (iкв = 1); iр – передаточное число раздаточной коробки (iдв = 1);
 .
.
Передаточное число первой передачи в КПП определяют из условия обеспечения движения при заданном максимальном дорожном сопротивлении.
 , (16)
, (16)
где ψmax - максимальный коэффициент дорожного сопротивления (ψmax = 0,23); Tmax - максимальный момент двигателя, Н•м (Tmax = 410 Н•м), ηтр – КПД трансмиссии (ηтр = 0,9).
 .
.
Полученное по формуле (16) значение iк1 необходимо проверить по условию отсутствия буксования:
 , (17)
, (17)
где Gсц – вес, приходящийся на ведущие колеса, Н; φ – коэффициент сцепления (φ = 0,7).
![]() , (18)
, (18)
![]()
 .
.
![]()
Условие отсутствия буксования (17) выполняется.
Передаточное число любой передачи КПП можно определить по формуле:
![]() , (19)
, (19)
где n – число передач, исключая заднюю (n = 5), k – номер передачи.
Передаточное число второй передачи КПП:
![]()
Передаточное число третьей передачи КПП:
![]()
Передаточное число четвертой передачи КПП:
![]()
Пятая передача – прямая, передаточное число iк5 = 1.
Передаточное число задней передачи КПП:
![]() , (20)
, (20)
![]() .
.
Максимальная скорость автомобиля при соответствующей передаче:
 , (21)
, (21)
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
![]() .
.
7. Определение рабочего объема двигателя
Рабочий объем двигателя Vh определяется из условия обеспечения требуемой мощности:
 , (22)
, (22)
где z – тактность двигателя (z = 4); Pmax – максимальная мощность двигателя, Вт (Pmax = 108,1 кВт); pep – среднее эффективное давление при максимальной мощности, Па (pep = 0,6 МПа); np – частота вращения коленвала при максимальной мощности, об/с (np = 50 об/с).
 .
.
Диаметр цилиндра:
 , (23)
, (23)
где i – число цилиндров (i = 8).
 .
.
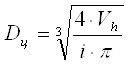
8. Геометрические характеристики проходимости автомобиля
К геометрическим характеристикам проходимости машины относятся:
-дорожный просвет δ, мм;
-углы въезда αП и съезда βП, град;
-радиусы продольной Rпр и поперечной проходимости Rпоп , м.
Дорожный просвет δ характеризует возможность движения автомобиля без задевания сосредоточенных на дороге препятствий. По [1] принят минимальный дорожный просвет δ = 245 мм.
Т.к. данный автомобиль
повышенной проходимости, дорожный просвет увеличиваем на 25...30%: ![]()
Углы въезда αП и съезда βП характеризуют проходимость автомобиля по неровностям в момент въезда на препятствие и съезда с него. По [1] приняты αП = βП = 40˚ для автомобиля повышенной проходимости.
Радиусы продольной Rпр и поперечной проходимости Rпоп определяют очертания препятствия, преодолеть которые автомобиль может, не задевая его. В соответствии с рисунком 5 и рисунком 6, выполненными в масштабе 1:50, приняты Rпр = 2200 мм, Rпоп = 1100 мм.
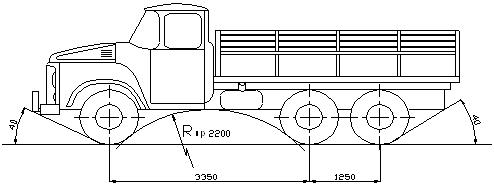
Рисунок 5 – Определение продольной проходимости
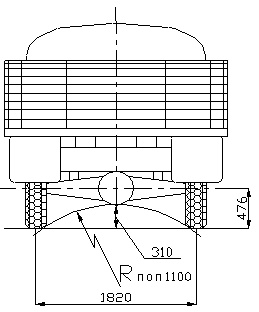
Рисунок 6 – Определение поперечной проходимости
9. Построение динамической характеристики автомобиля
Удельная свободная сила тяги, расходуемая на преодоление дорожных сопротивлений и разгон автомобиля, называются динамическими факторами. Он определяется на каждой передаче при работе с полной нагрузкой и выдвинутой рейкой топливного насоса.
Для каждой из передач, задаваясь последовательно значениями частоты вращения, определены соответствующие им значение скорости, м/с:
 , (24)
, (24)
где nei – текущая частота вращения коленвала, об/с; iтрi = передаточное число трансмиссии на соответствующей передаче;
![]() , (25)
, (25)
На первой передаче: iтр1 = 4 • 1 • 7,6 = 30,4;
На второй передаче: iтр2 = 2,83 • 1 • 7,6 = 21,5;
На третьей передаче: iтр3 = 2• 1 • 7,6 = 15,2;
На четвертой передаче: iтр4 = 1,41• 1 • 7,6 = 10,7;
На пятой передаче: iтр5 = 1• 1 • 7,6 = 7,6.
Сопротивления от ветровой нагрузки FВ , Н:
![]() , (26)
, (26)
где kB – аэродинамический коэффициент обтекаемости, Н•с2/м4 (kB = 0,6 Н•с2/м4), A - лобовая площадь автомобиля, м2 (A = 5,41 м2).
Динамический фактор:
 , (27)
, (27)
где ηтр – КПД трансмиссии (ηтр = 0,9);
Ga – вес автомобиля, Н (Ga = 83280 Н).
Значения, необходимые для построения динамической характеристики рассчитываются по формулам 24 - 27. Результаты приведены в таблице 3.
Таблица 3 – Расчет динамической характеристики
|
|
n, об/с | V, м/с | Т, Н•м | FВ, Н | D | |
| iтр1 = 30,4 | nmin | 10 | 0,98 | 287 | 3,1 | 0,198 |
| nТ | 30 | 2,95 | 331 | 28,3 | 0,228 | |
| nP | 50 | 4,92 | 279 | 77,7 | 0,192 | |
| nmax | 60 | 5,9 | 242 | 113 | 0,166 | |
| iтр2 = 21,5 | nmin | 10 | 1,39 | 287 | 6,28 | 0,140 |
| nТ | 30 | 4,17 | 331 | 56,5 | 0,161 | |
| nP | 50 | 6,95 | 279 | 157 | 0,134 | |
| nmax | 60 | 8,34 | 242 | 226,1 | 0,115 | |
| iтр3 = 15,2 | nmin | 10 | 1,97 | 287 | 12,6 | 0,099 |
| nТ | 30 | 5,9 | 331 | 113 | 0,113 | |
| nP | 50 | 9,84 | 279 | 315 | 0,093 | |
| nmax | 60 | 11,8 | 242 | 453 | 0,078 | |
| iтр4 = 10,7 | nmin | 10 | 2,79 | 287 | 25,3 | 0,069 |
| nТ | 30 | 8,38 | 331 | 228 | 0,080 | |
| nP | 50 | 14 | 279 | 637 | 0,060 | |
| nmax | 60 | 16,8 | 242 | 917,3 | 0,050 | |
| iтр5 = 7,6 | nmin | 10 | 3,93 | 287 | 50,2 | 0,049 |
| nТ | 30 | 11,8 | 331 | 452,5 | 0,052 | |
| nP | 50 | 19,7 | 279 | 1261 | 0,033 | |
| nmax | 60 | 23,5 | 242 | 1795 | 0,021 |
Так как для порожнего автомобиля D0 = Ga • D / G0 , то масштаб ординаты нужно уменьшить в Ga / G0 = 2,58 раз.
Динамический фактор ограничивается по сцепления:
 , (28)
, (28)
где Fφ – сила тяги по сцеплению, Н.
Так как при движении в условиях, когда может наступить буксование скорость машины невелика, то сопротивлением ветрового напора можно пренебречь (FВ = 0), то формула (28) принимает вид:
![]() , (29)
, (29)
где φ – коэффициент сцепления (φ = 0,7).
![]() .
.
Вывод: для заданных дорожных условий, буксования не наступит при движении на любой передаче.
Динамическая характеристика приведена на рисунке 7.
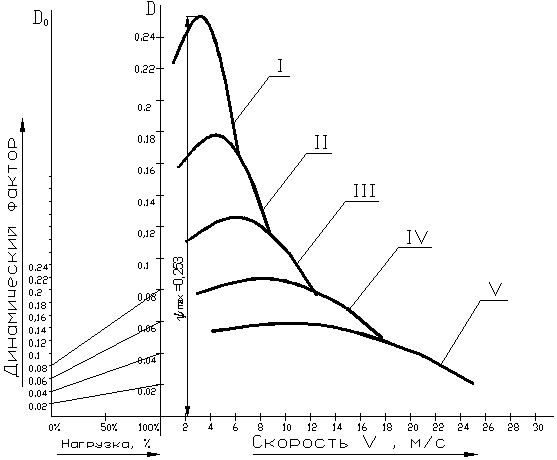
Рисунок 6 – Динамическая характеристика автомобиля
10. Построение графика ускорения автомобиля
Важнейшим динамическим свойством автомобиля является способность к быстрому разгону.
Из уравнения тягового баланса ускорение определяется:
 , (30)
, (30)
где β – коэффициент учета вращающихся масс; ψ – суммарный коэффициент дорожных сопротивлений (ψ = 0,025 [2]); D - динамический фактор.
![]() , (31)
, (31)
где a – коэффициент дорожных сопротивлений (a = 0,06)
Значения, необходимые для построения графика ускорений рассчитываются по формулам 30 - 31. Результаты приведены в таблице 4.
Таблица 4 – Данные для построения графика ускорений
|
|
n, об/с |
V, м/с |
β |
j, м/с2 |
|
|
iк1 = 4 |
nmin |
10 |
0,98 |
1,96 |
0,87 |
|
nТ |
30 |
2,95 |
1,02 |
||
|
nP |
50 |
4,92 |
0,84 |
||
|
nmax |
60 |
5,9 |
0,7 |
||
|
iк2 = 2,83 |
nmin |
10 |
1,39 |
1,48 |
0,76 |
|
nТ |
30 |
4,17 |
0,9 |
||
|
nP |
50 |
6,95 |
0,72 |
||
|
nmax |
60 |
8,34 |
0,6 |
||
|
iк3 = 2 |
nmin |
10 |
1,97 |
1,24 |
0,59 |
|
nТ |
30 |
5,9 |
0,70 |
||
|
nP |
50 |
9,84 |
0,54 |
||
|
nmax |
60 |
11,8 |
0,42 |
||
|
iк4 = 1,41 |
nmin |
10 |
2,79 |
1,12 |
0,39 |
|
nТ |
30 |
8,38 |
0,48 |
||
|
nP |
50 |
14 |
0,31 |
||
|
nmax |
60 |
16,8 |
0,22 |
||
|
iк5 = 1 |
nmin |
10 |
3,93 |
1,06 |
0,22 |
|
nТ |
30 |
11,8 |
0,25 |
||
|
nP |
50 |
19,7 |
0,07 |
||
|
nmax |
60 |
23,5 |
-0,04 |
График ускорений автомобиля приведен на рисунке 8.
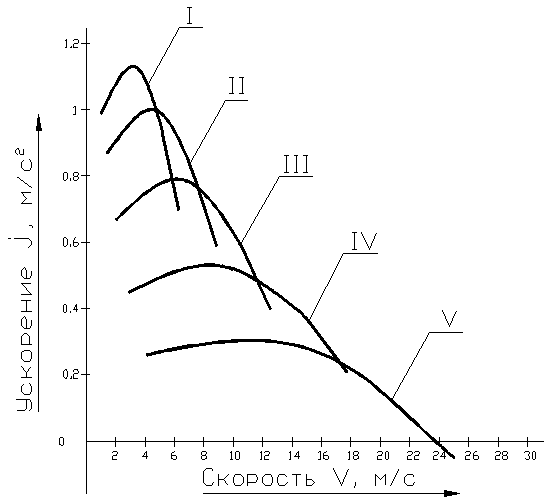
Рисунок 8 – График ускорений автомобиля
11. Построение графика тормозного пути автомобиля
Динамические и тормозные свойства автомобиля взаимосвязаны. Чем выше средняя скорость движения, тем лучше должны быть тормозные свойства, т. е. его хорошая динамика.
Построение графика минимального пути торможения автомобиля идет с максимальной скорости 0,9•Vmax до полной остановки V = 0.
Тормозной путь, м:
 , (32)
, (32)
где β – коэффициент учета вращающихся масс (β = 1 [2]);
φ – коэффициент сцепления (φ = 0,7).
Согласно рекомендации Европейской экономической комиссии ООН (ЕЭКООН) тормозной путь не должен превышать:
![]() . (33)
. (33)
Значения, необходимые для построения графика тормозного пути рассчитываются по формулам 32 - 33. Результаты приведены в таблице 5.
Таблица 5 – Данные для построения графика тормозного пути
| Параметр | Значение | |||||||
| V, км/ч | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 75 |
| V, м/с | 2,8 | 5,6 | 8,3 | 11,1 | 13,9 | 16,7 | 19,4 | 20,8 |
| SТmin , м | 0,6 | 2,3 | 5 | 9 | 14 | 20,3 | 27,4 | 31 |
| ST , м | 2,7 | 7,2 | 13,2 | 21,2 | 31,1 | 42,6 | 55,5 | 75 |
Вывод: тормозной путь получившийся в результате расчетов меньше максимально допустимого ЕЭКООН.
График тормозного пути автомобиля приведен на рисунке 9.
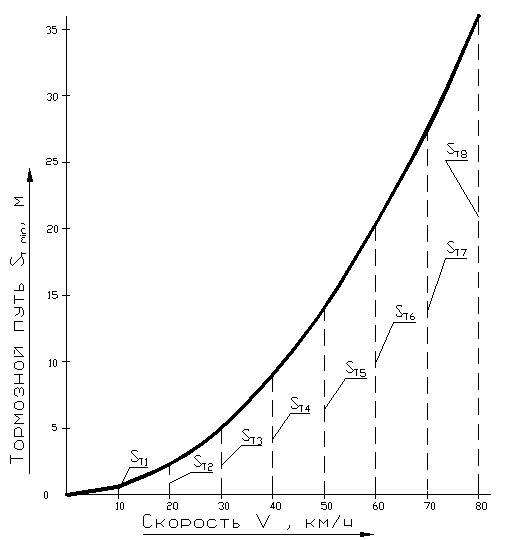
Рисунок 8 – График тормозного пути автомобиля
Список литературы
1. Краткий автомобильный справочник, НИИАТ, М.,1982. 223с.
2. Краткие методические указания к выполнению курсовой работы по дисциплине «Автотракторный транспорт и двигатели внутреннего сгорания»/ Ю.Н. Сырямин. Новосибирск, 1995. 28с.
3. Гуревич А.М. Тракторы и автомобили. М., 1983. 336 с.
4. СТО СГУПС 01.01-2007. Курсовой проект и дипломный проект. Требования к оформлению. Новосибирск, 2007. 60 с.
| Тяговый и динамический расчет автомобиля ВАЗ-21093 | |
|
Содержание Введение 1 Тяговый расчет автомобиля 1.1 Определение полной массы автомобиля 1.2 Распределение полной массы по мостам автомобиля 1.3 Подбор ... В предположении отсутствия буксования сцепления и ведущих колес автомобиля связь между частотой вращения коленчатого вала двигателя ne и скоростью V находится из соотношения: С целью построения динамической характеристики воспользуемся безразмерной величиной D - динамическим фактором, равным отношению свободной силы тяги (Fк - Fв) к силе тяжести ... |
Раздел: Рефераты по транспорту Тип: курсовая работа |
| ... изготовления дублирующего устройства управления учебным автомобилем | |
|
Министерство образования и науки Российской Федерации Тульский государственный педагогический университет им. Л. Н. Толстого Кафедра машиноведения и ... К ним относятся рулевое управление, с помощью которого изменяют направление движения автомобиля, и тормозная система, позволяющая уменьшить скорость или остановить автомобиль. Тормозной путь легкового автомобиля должен быть не более 12,2 м, а для автомобилей выпуска до 1 января 1981 года - до 14,5 м. При этом все колеса должны тормозить с одинаковой ... |
Раздел: Рефераты по транспорту Тип: реферат |
| ... диагностики, ремонта, технического обслуживания легковых автомобилей | |
|
... станция технического обслуживания для диагностики, ремонта, технического обслуживания легковых автомобилей. Выполнен анализ рынка сбыта легковых ... при контрольно-диагностических и крепежных работах - сошки и маятникового рычага рулевого управления, рулевого привода, рулевых тяг на шаровых пальцах и шаровых пальцев в гнездах ... регулировочных - регулировка свободного хода педали сцепления и тормоза, действия рабочей и стояночной тормозных систем, свободного хода рулевого колеса и зазора в соединениях ... |
Раздел: Рефераты по транспорту Тип: дипломная работа |
| ... технической эксплуатации ходовой части автомобилей "Toyota" | |
|
... национальный технический университет Автотракторный факультет Кафедра "Техническая эксплуатация автомобилей" Расчётно-пояснительная записка к ... Частичное отклонение автомобиля от направления прямолинейного движения ("виляние") в диапазоне скоростей 50...90км/ч. Основные причины: увеличенные зазоры между шаровыми пальцами и ... В настоящее время амортизаторы по влиянию на безопасность движения ставят в один ряд с такими элементами и системами активной безопасности автомобиля, как шины, тормозные системы и ... |
Раздел: Рефераты по транспорту Тип: курсовая работа |
| Тормозная система автомобиля | |
|
Оглавление. 1. Введение. 2.Анализ тормозных систем армейских автомобилей. 2.1 Требования, классификация, применяемость тормозных систем современных ... В этом случае для включения тормозных механизмов и создания, необходимых для быстрого торможения автомобиля тормозных моментов на колесах используется энергия двигателя приводящего ... Наибольший эффект регулирования тормозных сил автомобиля обеспечивает регулятор тормозных сил в пневмоприводе тормозов, имеющих упругую связь с задним мостом, который учитывает ... |
Раздел: Рефераты по транспорту Тип: реферат |