Курсовая работа: Автоматизированный электропривод машин и аппаратов химических производств
фЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
Кафедра "Методов и средств измерений и автоматизации"_
Курсовой проект защищен с оценкой
_____________________________
Руководитель
работы
(подпись, должность, и.о. фамилия )
«Автоматизированный электропривод машин и аппаратов химических производств»
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К КУРСОВОЙ РАБОТЕ
по дисциплине «Электротехника и электроника»
_________КР 240701.24.000ПЗ________
обозначение документа
Работу выполнил
студентка гр. ____________________
подпись, и.о. фамилия
Руководитель
доцент каф. ______________________
подпись, и.о. фамилия
2008
Задание
Выбрать электродвигатель привода технологического аппарата по исходным данным:
Назначение электродвигателя – для привода с регулированием скорости в широком диапазоне, обеспечивающем хорошие пусковые качества и перегрузочной способностью.
Вид автоматизированного пуска – в функции времени.
По назначению привода определить тип двигателя. Выбор двигателя осуществить по средней мощности нагрузки без проверки его по нагреву. Составить схему автоматизированного пуска двигателя. Описать конструктивные элементы двигателя и пусковой аппаратуры (реле, контакторов, магнитных пускателей, автоматических выключателей)
Таблица 1. Исходные данные
|
Мощность, Р1 |
Мощность, Р2 |
Мощность, Р3 |
Мощность, Р4 |
Мощность, Р5 |
| 25 кВт | 22 кВт | 15 кВт | 17 кВт | 19 кВт |
|
Время , t1 |
Время , t2 |
Время , t3 |
Время , t4 |
Время , t5 |
| 10 мин | 30 мин | 50 мин | 30 мин | 40 мин |
Содержание
Введение
1. Выбор рода тока и напряжения двигателя
2. Выбор номинальной скорости двигателя
3. Выбор конструктивного исполнения двигателя
4. Выбор двигателя по мощности
5. Расчёт мощности и выбор электродвигателя для длительного режима работы
6. Устройство и принцип действия двигателя постоянного тока
6.1. Электромагнитная схема
6.2. Получение постоянной э. д. с. якоря
6.3. Конструкция современной машины постоянного тока
7. Обозначение элементов и изображение схемы автоматизированного пуска двигателя
Контакт размыкающий с выдержкой времени при замыкании
8. Автоматизация пуска двигателя в функции времени
9. Электрические реле
10.Заключение
11. Литература
Введение
Производительность механизма, качественно выпускаемой им продукции или ход технологического процесса во многом зависят от электродвигателя. Правильный выбор типа двигателя и особенно его номинальной мощности имеют большое народнохозяйственное значение, поскольку определяют первоначальные затраты и стоимость эксплуатационных расходов электропровода.
Отечественная электротехническая промышленность выпускает широкую номенклатуру типов электродвигателей различных диапазонов мощностей, частот вращения, конструктивного использования.
В каталогах приводятся номенклатурные данные о механической мощности двигателя, частоте вращения, напряжении, токе, к.п.д., а так же о кратности (по отношении к номинальному) пускового тока, пускового и максимального моментов асинхронных двигателей. Кроме того, приводится сведения о массогабаритных и установочных размерах электродвигателя, его конструктивном исполнении.
В задачу выбора электродвигателя входит:
-выбор рода тока и номинального напряжения;
- выбор номинальной частоты вращения;
- выбор конструктивного исполнения;
-определения номинальной мощности и выбор соответствующего ей двигателя по каталогу.
В производственных условиях не всегда требуется решать весь комплекс этих вопросов. Часть их бывает задана: род тока, напряжение, частота вращения. Основное значение при этом имеет правильное определение мощности и конструктивного типа двигателя.
Прежде чем решать задачу выбора электродвигателя, необходимо чётко представлять себе работу механизма, для которого его подбирают: Будет ли двигатель с механизмом работать длительно или кратковременно, с постоянной или регулируемой скоростью, будет ли изменяться (и как) момент сопротивления и мощность при работе.
1. Выбор рода тока и напряжения двигателя
В основу этого выбора положены экономические соображения. Электродвигатели имеют высокую стоимость, т.к. являются сложными изделиями, в которых используются ценные электротехнические материалы, рассчитанные на длительный срок службы (20 лет). Поэтому выбор начинают с «примерки» пригодности для привода самых простых и дешёвых двигателей – трёхфазных асинхронных с КЗ - ротором и до самых сложных и дорогих – двигателей постоянного тока.
По назначению выбираем тип двигателя – постоянного тока [1, стр.448]. Выбор рода тока электродвигателя определяют и выбор его номинального напряжения, которое обычно берут равным напряжению источника электропитания цеха, завода, стройплощадки (чаще всего это трёхфазная сеть с основным напряжением 380/220 В). Повышение или понижение напряжения для двигателей с помощью трансформаторов, применение выпрямителей для двигателей постоянного тока приводит к увеличению затрат на электрооборудование.
2. Выбор номинальной скорости двигателя
Высокая скорость электродвигателя позволяет уменьшить его габаритные размеры, массу и стоимость. Для согласования скоростей двигателя и механизма ставят редуктор, что удорожает электропривод. Вопрос о рациональном соотношении двигатель – редуктор решается конструктором при проектировании механизма.
3. Выбор конструктивного исполнения двигателя
Конструктивное исполнение современных серий электродвигателей учитывает три фактора: защиту от воздействия окружающей среды, обеспечение охлаждения и способ монтажа.
По способу защиты от воздействия окружающей среды электродвигатели изготавливают в защищённом, закрытом и взрывонепроницаемом исполнении.
Защищённые от попадания мелких предметов и капель двигатели предназначены для работы в сухих непыльных местах.
Закрытые двигатели устанавливают в помещениях с повышенной влажностью, атмосферой, загрязненной пылью с металлическими включениями, парами масла или
керосина.
Взрывозащищенные двигатели имеют корпус, способный выдерживать взрыв газа внутри машины и исключающий при этом выброс пламени в окружающую среду.
По способу охлаждения различают двигатели с естественным охлаждением, самовентиляцией внутренней или наружной и посторонним продувом (принудительным).
По способу монтажа имеются двигатели с горизонтальным расположением вала и станиной на лапах, с вертикальным расположением вала и фланцем на нижнем щите и т.д. Выбираемый двигатель должен иметь тот же способ установки, крепления и соединения с механизмом, что и заменяемый.
4. Выбор двигателя по мощности
Завершающим этапом является определение номинальной мощности двигателя и выбор по ней в каталоге подходящего двигателя. Однако номинальную мощность просто определить только при длительной работе с постоянной нагрузкой, которую и принимают за номинальную. В подавляющем большинстве случаев момент, мощность и ток двигателя изменяются во времени. Нагрузочные диаграммы двигателей многих механизмов включают периоды работы и пауз. При подобной переменной нагрузки двигатель должен условиям допустимого нагрева, обладать максимальным моментом, достаточным для преодоления возможных кратковременных перегрузок и при пуске с большой нагрузкой иметь избыточный пусковой момент для обеспечения разгона привода.
Максимальный момент, характеризующий перегрузочную способность, а так же пусковой момент определяются электромагнитными свойствами двигателя.
5. Расчёт мощности и выбор электродвигателя для длительного режима работы
Определение номинальной мощности двигателя для работы в длительном режиме с переменной нагрузкой сводится к подсчёту мощности Рс исполнительного механизма, приведённой к валу двигателя (с учётом к.п.д. передач, редукторов и т. д.). По полученной мощности Р в каталогах выбирают двигатель с номинальной мощностью РНОМ>Рс
![]()
k=1.1―1.3 , где k - коэффициент запаса.
По [2] выбираем двигатель переменного тока марки 4ПФ132L.
Таблица 2. Справочные данные электродвигателя переменного тока марки
| Номинальная мощность, кВт | 23.6 |
| Напряжение на якоре, В | 440 |
| КПД, % | 83 |
| Частота вращения, об/мин | 1400 |
Электродвигатели постоянного тока часто являются исполнительными звеньями систем автоматического регулирования, а специальные генераторы используются как усилители электрических сигналов управления и как тахогенераторы – датчики частоты вращения.
Наиболее распространены машины общепромышленного применения серии П, выпускаемые как двигатели или как генераторы на мощности 0,15 – 200 кВт, частоты вращения 2870 – 550 об/мин (более мощные – тихоходные), напряжения 110 – 460 В.
При целом ряде преимуществ машины постоянного тока имеют существенный недостаток, связанный с работой так называемого щеточноколлекторного узла. При определённых неблагоприятных условиях щётки могут искрить, что снижает надёжность работы и требует надзора и ухода за машиной.
6. Устройство и принцип действия двигателя постоянного тока
6.1. Электромагнитная схема
В машине постоянного тока создается неподвижное магнитное поле полюсов статора, в котором вращается ротор с расположенными на нем проводниками, образующими рабочую обмотку.
Рассмотрим подробнее схему устройства машины постоянного тока. На рис. 2 показана магнитная система двухполюсной машины и картина поля в ней. Основные полюсы укреплены на внутренней поверхности полого стального цилиндра — станины, являющейся частью магнитопровода. На полюсах находятся катушки-, соединенные последовательно и образующие обмотку возбуждения. Магнитное поле создается током возбуждения Iв в катушках (реже постоянными магнитами). Цепь возбуждения — это вспомогательная цепь машины. Картина магнитного поля изображена на рис. 2 магнитными линиями.
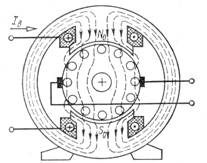
Рис. 2. Магнитное поле машины
Магнитная система и поле машины симметричны относительно продольных осей полюсов N0—S0. Линии, проходящие посередине между смежными полюсами, называют поперечными магнитными осями, а их следы на поверхности якоря — геометрическими нейтралями. Ротор с рабочей обмоткой в машинах постоянного тока называют якорем. Для равномерного распределения магнитной индукции в зазоре между полюсами и якорем служат полюсные наконечники, как бы охватывающие якорь. Обмотка якоря состоит из уложенных на поверхности (в пазах) ротора «активных» проводников, соединенных в витки (секции, см. рис. 10) так, что она всегда представляет собой замкнутый контур.
Поскольку обмотка якоря вращается, соединение с ее внешней цепью осуществляется скользящим контактом с помощью неподвижных электрографитовых щеток. Цепь якоря — это главная цепь машины.
6.2. Получение постоянной э. д. с. якоря
Рассмотрим получение постоянного напряжения между щетками. Для этого изобразим модель якоря между двумя полюсами машины (рис. 3).
Пусть машина используется в качестве генератора и якорь приводится во вращение с постоянной угловой скоростью Ω в указанном на рис. 3 направлении, а внешняя цепь отключена. В проводниках, лежащих в пазах на поверхности и пересекающих линии нормальной к ней составляющей магнитной индукции В в зазоре между полюсом и якорем, при вращении якоря наводятся э. д. с.
e = Blv,
где l — длина проводника (или якоря); ν — линейная (окружная) скорость проводников.
Эти проводники называют активными.
Соединительные проводники на торцовых поверхностях якоря (лобовые части, см. рис. 9 и 10) не пересекают магнитных линий и в них э. д. с, не наводятся.
Применив известное правило правой руки для определения направления э. д. с. в активных проводниках, убедимся, что во всех проводниках, движущихся под одноименными полюсами, э. д. с. направлены одинаково; (крестики или точки). Под северным и южным полюсами направления э. д. с. противоположны. В проводниках, проходящих геометрические нейтрали, э. д. с. не наводятся, так как здесь B = 0. Таким образом, при вращении якоря в его проводниках наводятся переменные э.д.с.
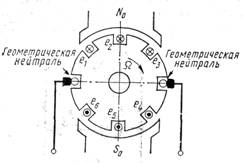
Рис. 3. Модель якоря двухполюсной машины
Как указывалось, обмотка якоря представляет собой замкнутый контур (это легко видеть на изображении простейшей обмотки якоря — бесконечной спирали на тороиде рис. 4, которая применялась в первых машинах).
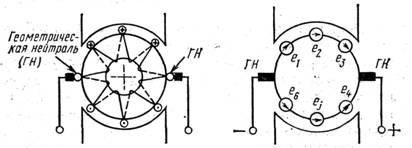
Рис. 4. Простейшая замкнутая обмотка якоря и ее схема
Однако ток в контуре не возникает, так как алгебраическая сумма мгновенных значений э. д. с. е всех последовательно соединенных проводников обмотки равна нулю: обмотка выполняется с равным числом проводников под каждым полюсом, магнитные потоки полюсов одинаковы, полярность полюсов чередуется.
Если установить неподвижные электрографитовые щетки для осуществления скользящего контакту с проводниками, проходящими геометрические нейтрали (см. рис. 3), то между щетками всегда будут находиться проводники обмотки с одинаково направленными э. д. с. е, сумма которых максимальна и постоянна (при сдвиге щеток эта сумма уменьшается).
В действительности щетки касаются не проводников на поверхности якоря, а соединенных с ними соответствующих пластин коллектора (см. рис. 5 и 10). Коллектор — цилиндр, набранный из медных пластин, изолированных одна от другой прокладками, и закрепленный на валу. Щетки устанавливают так, чтобы они касались пластин коллектора, соединенных с проводниками, проходящими геометрические нейтрали.
В результате установки щеток и соединения их с внешней цепью обмотка якоря по отношению к его зажимам оказывается разделенной на параллельно соединенные ветви с одинаковыми э. д. с. Е и сопротивлениями Rа. Из схематически изображенной на рис. 6, а обмотки якоря видно, что э. д. с. якоря Е равна э. д. с. любой из параллельно соединенных ветвей. Внутреннее сопротивление якоря Rя — это эквивалентное сопротивление параллельно соединенных ветвей обмотки. Обычно оно мало (от долей ома у крупных машин до единиц ом у небольших). Если к зажимам якоря генератора присоединить внешнюю электрическую цепь, то э. д. с. якоря создаст в цепи ток якоря (ток нагрузки, рабочий ток). В двигателе ток создается внешним источником и в якоре делится на токи параллельных ветвей. Направление тока во всех проводниках одной параллельной ветви одинаковое, противоположное направлению токов в другой ветви.
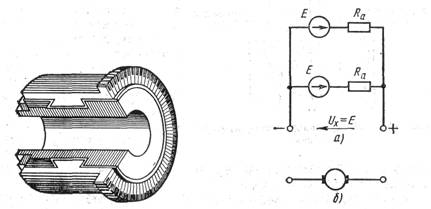
Рис. 5. Коллектор (разрез) Рис. 6. Схема замещения обмотки якоря с двумя параллельными ветвями (а), изображение якоря по ГОСТ (б)
Обычно машина постоянного тока выполняется многополюсной (см, рис. 7 и 8). При этом возрастает число пар щеток и параллельных ветвей якоря.
На электрических схемах якорь машины постоянного тока изображают (ГОСТ 2.756—76) условно в виде окружности с двумя диаметрально расположенными щетками (рис. 6, б), а обмотку возбуждения — как индуктивный элемент.
6.3. Конструкция современной машины постоянного тока
Выше была рассмотрена двухполюсная модель машины постоянного тока. Современные машины имеют не менее четырех полюсов. На рис. 7 показаны основные элементы конструкции четырехполюсной машины, а на рис. 8 — разрез ее магнитной системы.
Станина (6 на рис. 7) представляет собой полый стальной цилиндр, внутри которого укреплены основные полюсы 5 магнитной системы с катушками обмотки возбуждения. Между основными находятся узкие добавочные полюсы 4 со своими катушками
Станину машины отливают или свертывают в цилиндр из толстой листовой стали и сваривают по шву. Полюсы отковывают из мягкой стали или набирают из стальных пластин. К торцам станины прикреплены подшипниковые щиты 1 с подшипниками, в которых вращается вал якоря 3. На щите со стороны коллектора установлены щеткодержатели со щетками 2. Якорь представляет собой стальной барабан, (рис. 9,
Для уменьшения потерь от вихревых токов при перемагничивании его набирают из дисков электротехнической стали толщиной 0,5 мм (рис. 9, в). Барабанная обмотка отличается от спиральной обмотки на тороиде тем, что все проводники укладываются витками на поверхности барабана и являются активными. При этом стороны витка располагаются под разноименными полюсами так, что э. д. с. в них складывается. На рис. 10 схематически показана укладка витков обмотки в пазы и их соединение с коллекторными пластинами. Проводники (витки) обмотки, заключенные между двумя ближайшими пластинами, образуют секцию обмотки (на рис. 10 показаны только две секции). Обмотка имеет несколько десятков секций, столько же и коллекторных пластин.
На корпусе машины имеется коробка с зажимами, куда выведены концы обмотки якоря и обмотки возбуждения. На паспортном щитке указываются номинальные параметры машины: отдаваемая электрическая мощность генератора или механическая мощность двигателя, напряжение, ток, частота вращения, способ возбуждения, к. п. д., масса, номер машины и марка завода-изготовителя.
6.4. Принцип действия генератора
Пусть якорь машины вращается в магнитном поле с помощью какого-либо приводного двигателя (рис. 11, а). Как указывалось, в проводниках вращающегося якоря возникают э. д. с, направление которых можно определить по правилу правой руки
Если к зажимам якоря подключить приемник, то э. д. с. якоря вызовет в цепи ток. Но с появлением тока в проводниках якоря, находящихся в магнитном поле, возникают электромагнитные силы. Определим их направление на рис. 11. Токи в проводниках якоря направлены также, как и вызвавшие их э. д. с. По правилу левой руки найдем, что электромагнитные силы создают момент, противодействующий вращению якоря. Если скорость якоря Ω постоянна, то вращающий момент приводного двигателя равен противодействующему электромагнитному моменту генератора: Mвр=Mпр=M. Таким образом, для производства электрической энергии необходимо затрачивать механическую энергию. В соответствии со схемой замещения цепи якоря генератора (рис. 11, б) запишем уравнение ее электрического состояния:
E = U + RяIя
Умножив это выражение на Iя, получим уравнение баланса мощности цепи якоря:
EIя = UIя + RяI2я
Мощность приемника Р=UIя и мощность, электрических потерь в обмотке якоря ΔPэя = RяI2я составляет электромагнитную мощность EIя = Pэм, развиваемую генератором, травную механической мощности приводного двигателя:
EIя = Pэм = MΩ = Pмех.
6.5. Принцип действия двигателя
Если подать на зажимы неподвижного якоря машины постоянного тока напряжение от какого-нибудь источника, то оно вызовет ток в цепи якоря (рис. 12). Пусть направление токов в якоре будет таким, как на рис. 12, а. Определив направление электромагнитных сил, найдем, что они создают вращающий момент. Машина работает в качестве электродвигателя. Если скорость ротора Ω постоянна, то вращающий момент равен противодействующему моменту сопротивления механизма на валу: Мвр=Мпр=М. Во вращающемся в магнитном поле якоре наводится э. д. с. Определив направление э. д. с. в проводниках якоря на рис. 12, а, найдем, что оно противоположно направлению тока. Ток направлен против э. д. с. Поэтому часто э. д. с. якоря двигателя называют противо-э. д. с. Составив схему замещения цепи якоря двигателя (рис. 12, б), найдем, что приложенное к зажимам якоря двигателя напряжение равно сумме противо-э. д. с. и падения напряжения на внутреннем сопротивлении якоря:
U = E + RяIя
Отсюда ток якоря двигателя
Iя = (U - E)/ Rя
Уравнение баланса мощности цепи якоря двигателя имеет вид
U Iя = E Iя + RяI2я
Оно показывает, что электрическая мощность Рэ = U Iя, подводимая к двигателю от внешнего источника, превращается в электромагнитную мощность Pэм = EIя и мощность потерь в обмотке якоря. Электромагнитная мощность, как и в генераторе, равна механической мощности, развиваемой двигателем:
EIя = Pэм = MΩ.
7. Обозначение элементов и изображение схемы автоматизированного пуска двигателя
Электрические машины, аппараты и устройства управления ими на схемах изображаются условными обозначениями (ГОСТ 2.756-76). В таблице 3 приведены обозначения релейно-контакторных элементов управления электроприводами, которые используются на схеме пуска двигателей параллельного возбуждения в функции скорости.
Таблица 3. Обозначение релейно-контактных элементов управления электроприводом
| Наименование | Обозначение по ГОСТ 2.756 – 76 |
| Обмотка контактора, магнитного пускателя или реле |
|
| Кнопки с замыкающим и размыкающим контактами |
|
| Контакт замыкающий с выдержкой времени при замыкании |
|
| Контакт размыкающий с выдержкой времени при замыкании |
|
8. Автоматизация пуска двигателя в функции времени
Схема реостатного пуска двигателя постоянного тока в функции времени приведена на рисунок 13. Выдержка времени для выведения ступеней пускового реостата обеспечивается реле времени 1РВ и 2РВ.
Нажатие кнопки «Пуск» вызывает подключение контактором Л Цепи якоря к сети и отключение реле 1РВ, которое размыкает свой контакт 1РВ, отключая катушки контакторов ускорения 1У и 2У. Возникает пусковой ток, ограниченный сопротивлением реостата R1+R2. Падение напряжения на резисторе R1 от пускового тока приводит к срабатыванию реле времени 2РВ, размыкающего свой контакт 2РВ.
С определенной выдержкой времени замыкается контакт 1РВ, включающий контактор ускорения 1У, который замыкает ступень Реостата вместе с реле 2РВ. При отпадании якоря 2РВ его контакт 2РВ с выдержкой времени замыкается, включая контактор ускорения 2У. Контакт 2У замыкает ступень реостата R2 — двигатель выходит на естественную механическую характеристику.
9. Электрические реле
Реле – устройство, в котором при достижении определенного значения входной величины выходная величина изменяется скачком – выходные контакторы либо замыкаются – в управляемой цепи появляется ток (напряжение), либо размыкается. Реле применяют в цепях управления с током менее 1А. Входной величиной реле могут быть механические, тепловые, электрически и другие внешние воздействия.
Широкое распространение получили электрические реле (электромагнитные, магнитоэлектрические, электродинамические, индукционные). Которые реагируют изменение тока (напряжения) в обмотке управления (намагничивающей обмотке).
Электронные реле выполняют множество функций, связанных с контролем режимов работы важных элементов электрической цепи – генераторов, трансформаторов, линий передач, различных приёмников.
При нарушении нормального режима того или иного элемента соответствующее реле приводит в действие аппаратуру, которая либо восстанавливает нормальный режим работы, либо отключает повреждённый участок. Такие реле – реле защиты – могут «наблюдать» за током в цепи (токовая защита), напряжением на отдельных участках (защита по напряжению), изменением мощности (реле мощности), изменением частоты тока и т.д. В зависимости от значения или направления входной величины, приводящей к срабатыванию реле, различают реле: максимальные, минимальные, направленного действия, дифференциальные и др.
Тепловое реле состоит из биметаллической пластины, которая находится в тепловом поле нагревателя, включенного последовательно с контролируемым объектом (приёмником), и контактов. Если контролируемый ток больше допустимого, то через некоторое время биметаллическая пластина под действием избыточной теплоты нагревателя изогнётся, так как её нижний слой расширяется (удлиняется) больше, чем верхний. Пластина освобождает защёлку, которая под действием пружины поворачивается, и контакты размыкаются.
Важным параметром реле
является чувствительность, т.е. мощность Ру в цепи управления, при которой
срабатывает реле. У высокочувствительных реле ![]() 10 мВт, реле
нормальной чувствительности срабатывают при Ру =1…5 Вт, реле низкой чувствительности
– при Ру =10…20 Вт.
10 мВт, реле
нормальной чувствительности срабатывают при Ру =1…5 Вт, реле низкой чувствительности
– при Ру =10…20 Вт.
10. Заключение
В данной курсовой работе по назначению привода определяется тип двигателя. Выбранный двигатель работает в длительном режиме с переменной нагрузкой согласно нагрузочной диаграмме. Выбор двигателя осуществляется по средней мощности нагрузки без проверки его по нагреву, которая равна 23.6 кВт, напряжение на якоре – 440В, КПД – 83%, чистота вращения – 1400 об/мин.
11. Литература
1. Электротехника. Зайдель Х. Э., Коген-Далин В. В., Крымов В.В. и др.; Под ред. Герасимова В. Г. – 3-е изд., перераб. и доп.-М.: Высш. шк., 1985.- 480 с., ил.
2. Справочник по электрическим машинам. Под. ред. Копылова