Дипломная работа: Автоматизированная система управления компрессорной установки
ВВЕДЕНИЕ
Компрессорные машины - важные виды продукции машиностроения. Они применяются во многих отраслях народного хозяйства: химической, нефтяной, газовой и машиностроительной, на транспорте, в металлургии, геологии, строительстве, агропромышленном комплексе, а также - в новых перспективных направлениях техники и технологии, в частности, в космонавтике, робототехнике, производстве искусственного топлива и др. Сердцем любой холодильной и криогенной установки является компрессор. От эффективности и надежности его работы зависят КПД и долговечность комплекса в целом.
В настоящее время в России и в странах СНГ эксплуатируется свыше 500 тысяч промышленных компрессоров, которые вместе с вентиляторами и насосами потребляют около 20% вырабатываемой в стране электроэнергии. Производством и ремонтом компрессоров занято свыше 1 млн. человек. В связи с этим вопросы повышения технического уровня компрессоров и холодильных установок, в частности, их эффективности и надежности, имеют важное народнохозяйственное значение и поэтому являются основными в деятельности многих научно-исследовательских и конструкторско-технологических организаций, а также промышленных предприятий отрасли холодильного и компрессорного машиностроения.
Основными направлениями развития опытно-конструкторских и научно-исследовательских работ являются:
1. Дальнейшая разработка и создание гибких унифицированных рядов компрессоров общего назначения, на основе которых должны создаваться специальные компрессоры по единичным и малым заказам, совершенствование систем регулирования для расширения диапазона эффективной работы.
2. Дальнейшая разработка и внедрение моноблочных и блочных компрессорных установок с максимальной степенью заводской готовности и установок с воздушным охлаждением, в том числе устанавливаемых на открытых площадках.
3. Проведение мероприятий, направленных на экономию материальных и энергетических ресурсов путем повышения быстроходности компрессоров, совершенствования конструкций теплообменной аппаратуры, использования вторичных энергоресурсов, внедрения прогрессивных технологических процессов и новых материалов, в том числе пластмасс и керамики.
4. Разработка на основе функциональных исследований новых принципов и схем сжатия и перемещения газов, в частности, водорода с использованием гидридов металлов, наддувных волновых компрессоров.
5. Проведение работ по совершенствованию компрессоров путем организации рабочего процесса и конструкций машин на основе фундаментальных экспериментальных и теоретических исследований, математических моделей и подсистем САПР, создание комплексных математических моделей отдельных типов машин, описывающих рабочие процессы с учетом прочности и надежности конструкций и металлоемкости. Создание и внедрение норм расчета, оптимизированных программ экспериментальных исследований, стандартов на методы испытаний компрессоров и их элементов.
6. Исследования и разработка мероприятий по уменьшению шума и вибраций компрессорного оборудования, по повышению его надежности, безопасности и экологичности.
7. Завершение формирования испытательной базы для проведения сертификационных испытаний с целью максимального использования накопленного в компрессоростроении и холодильном машиностроении научно-технического потенциала и обеспечить их аккредитацию органам сертификации. Привлекать к работам по сертификации ведущих специалистов институтов, организаций, предприятий в области компрессоростроения и холодильного машиностроения.
8. Ускорение создания системы стандартизации, внедрение единой классификации, терминологии и обозначений в области компрессоростроения и холодильного машиностроения с учетом международных стандартов.
9. Разработка и создание стандартных и передвижных автоматизированных измерительных комплексов для проведения испытаний компрессоров в соответствии с типовыми методиками при одновременной обработке опытных данных с использованием ЭВМ. Разработка и внедрение типовых схем и программ измерений, увязанных с соответствующими датчиками, преобразователями сигналов, программами обработки и анализа опытных данных в ходе испытаний.
10. Продолжение разработки и создание эффективных устройств очистки и осушки газов перед входом в компрессоры различных типов, а также антиобледелительных систем.
11. Организация на предприятиях-изготовителях сервисного обслуживания выпускаемых машин и введение спецремонта компрессоров.
12. Расширение работ по модернизации эксплуатируемого компрессорного оборудования с сохранением основных, особенно крупногабаритных элементов, и повышению основных технико-экономических характеристик с учетом требований эксплуатации.
13. Продолжение работы по созданию систем охлаждения компрессорных установок и эффективного теплообменного оборудования, обеспечивающих решение вопросов снижения водопотребления и утилизации теплоты сжатия.
Большая часть парка компрессорного и холодильного оборудования в России и СНГ морально и физически изношена, требует в значительной части замены или модернизации. Поэтому в настоящее время более актуальной становится задача по ремонту и модернизации компрессорного и холодильного оборудования, в особенности крупного эксплуатируемого оборудования. При этом заказчик, как правило, выдвигает требования по частичному изменению параметров компрессора или установки в целом, с одновременным повышением критериев по надежности, безопасности, экономичности и экологичности.
В основном, компрессорные установки являются неотъемлемой составной частью большинства промышленных и общественных комплексов (химических, нефтеперерабатывающих, газовых, автомобильных, научно-исследовательских). Основная задача КУ – бесперебойное обеспечение объекта газовой смесью с заранее установленными параметрами. Следовательно отказ КУ приводит к простою всего комплекса или, как минимум, его большую часть, а это колоссальные убытки. Снижение расходов на обслуживание и продление межремонтного срока, а также упрощение диагностики неполадок в совокупности с повышением надежности, позволяет говорить о значительной выгоде связанной с применением новой системы управления вместо традиционной при модернизации существующих станций.
КУ требует постоянного контроля со стороны обслуживающего технического персонала, и предусматривает сохранение нормативных показателей работы основных узлов. Однако нестабильность нагрузки, которой подвергается КУ, приводит сокращению как общих часов наработки, так и межремонтных сроков эксплуатации оборудования. Внедрение новой линейки управляющих средств, так и исполнительных механизмов позволило значительно улучшить показатели надежности, ремонтопригодности и экономической выгоды КУ. В основном, применялось оборудование из семейства, прошедшего тестирование на подобных агрегатах и показавших себя наилучшим образом, с расширенными функциональными возможностями (расширение основной платформы интегрированных модулей, наличие сетевых узлов, оптимизация и упрощение программных компонентов), приемлемыми показателями точности измерений.
1. ОПИСАНИЕ ФУНКЦИОНИРОВАНИЯ КОМПРЕССОРНОЙ УСТАНОВКИ КОМПЛЕКСА ГИДРООЧИСТКИ МОТОРНОГО ТОПЛИВА (Л-24/6)
Компрессорная установка является неотъемлемой частью комплекса гидроочистки моторного топлива. Используемое оборудование должно отвечать нормам и критериям экологичности, безопасности, а главное, обоснованности применения в данной области. Система управления позволяет контролировать КУ, не загружая всю систему в целом, а лишь предоставляя отчет о ведение технологического процесса. Модульность построения архитектуры всего комплекса гидроочистки позволяет производить замену частей оборудования без остановки системы.
Общая характеристика комплекса
Установка гидроочистки Л-24/6 предназначена для удаления сернистых соединений из прямогонных дизельных фракций с содержанием серы до 2,0 %мас., керосиновых фракций с содержанием серы до 1,0 %мас., бензиновых фракций первичного и вторичного происхождения с содержанием серы до 1,0 %, вторичных фракций каталитического крекинга. На установке можно перерабатывать смесь первичных и вторичных дизельных фракций в соотношении 1:1 с содержанием серы до 1,5 %мас. (основное сырье).
Основные реакции каталитического гидрирования
Удаление примесей из нефтепродуктов происходит в результате частичной деструкции в основном сераорганических и частично кислородных и азотистых соединений в присутствии катализатора гидроочистки в среде водородсодержащего газа.
Продукты разложения насыщаются водородом с образованием сероводорода, воды, аммиака и предельных или ароматических углеводородов.
Кроме реакций взаимодействия сернистых, азотистых и кислородных соединений, в процессе гидроочистки протекают также реакции гидрокрекинга, насыщения олефинов, дегидрирования нафтеновых углеводородов, циклизации парафиновых углеводородов в нафтеновые (в области повышенных температур), гидрирования ароматических углеводородов при низких температурах и высоких давлениях.
Факторы, влияющие на ход процесса
В соответствии с механизмом протекания реакций гидроочистки моторных топлив скорость реакции зависит:
־ от химической природы сырья;
־ физических свойств сырья;
־ типа катализатора и его состояния;
־ парциального давления водорода;
־ объемной скорости;
־ конструкции реактора, например, от распределительного устройства газо-сырьевой смеси.
Поскольку скорость реакции является сложной функцией каждого из этих параметров и многие из них взаимосвязаны, очевидно, что количественно оценить влияние каждого параметра раздельно практически невозможно. Практически проанализировав параметры, выявим основные, которые будут наиболее важными при проектировании нашей системы.
1. Температура:
правильно выбранный интервал рабочих температур обеспечивает как требуемое качество, так и длительность безрегенерационного пробега и общего срока службы катализатора. Наиболее благоприятным для загруженных катализаторов является интервал рабочих температур 320 - 380 оС.
Рост степени обессеривания пропорционален повышению температуры до определенных пределов.
Каждый вид сырья имеет свой максимум температур, после которого увеличивается скорость реакций разложения и насыщения непредельных углеводородов по сравнению со скоростью реакций гидрирования сернистых соединений, в связи с чем уменьшается избирательность действия катализатора по отношению к сере и рост степени обессеривания замедляется, возрастает выход газа, легких продуктов и кокса. Увеличивается расход водорода и количество образовавшегося на катализаторе кокса.
Слишком занижать температуру также не следует, так как при этом значительно замедляется скорость реакций обессеривания.
2. Парциальное давление водорода:
повышение давления при неизменных прочих параметрах процесса вызывает изменение степени превращения в результате увеличения парциального давления водорода и углеводородного сырья и содержания жидкого компонента в системах, находящихся при давлениях и температурах соответственно выше и ниже условий начала конденсации.
Первый фактор способствует увеличению степени превращения, второй замедляет протекание реакции.
Увеличение давления в системе до уровня, превышающем давление начала конденсации, при неизменной температуре реакции способствует образованию жидкой фазы, что приводит к замедлению основных реакций процесса.
Сильное увеличение давления ухудшает сепарацию водородсодержащего газа и увеличивает потерю его с сухим газом.
Быстрое понижение давления может привести к повреждению катализатора.
Понижение давления без предшествующего понижения температуры может вызвать образование отложений кокса.
С ростом общего давления в процессе, при прочих равных условиях, растет парциальное давление водорода. Поскольку водород является одним из основных химических реагентов, то повышение его парциального давления ускоряет реакции гидрирования и способствует уменьшению возможности отложения кокса на катализаторе, что увеличивает его срок службы.
Суммарное влияние парциального давления водорода слагается из раздельных влияний:
־ общего давления,
־ концентрации водорода в циркуляционном газе,
Требование к содержанию водорода в циркулирующем газе определяется качеством сырья: прямогонные фракции очищаются при меньшей концентрации, крекинговые - при большей концентрации водорода.
С понижением концентрации водорода в циркуляционном газе несколько уменьшается безрегенерационный цикл работы катализатора.
־ отношения «водород: углеводородное сырье».
В промышленной практике объемное отношение «водород: сырье» (или кратность циркуляции) выражается отношением объема водорода при нормальных условиях к объему сырья.
С точки зрения экономичности процесса заданное отношение целесообразно поддерживать циркуляцией водородсодержащего газа. В этом случае большое влияние приобретает концентрация водорода в циркуляционном газе.
Увеличение отношения «циркуляционный газ: сырье» в значительной степени определяет энергетические затраты. Заметное возрастание скорости реакций при увеличении кратности циркуляции происходит только до определенного предела.
Описание технологической схемы комплекса
Технологическая схема комплекса состоит из следующих блоков:
а) реакторный блок и блок стабилизации первого потока;
б) реакторный блок и блок стабилизации второго потока;
в) блок очистки циркулирующего газа, газа стабилизации и регенерации МЭА.
Описание технологического цикла, в котором участвует компрессорная установка
Реакторный блок - 1 поток.
Исходное сырье - дизельное топливо из сырьевого парка по трубопроводу поступает на прием сырьевых насосов Н-1, 2. С выкида насосов сырье подается на щит смешения с циркулирующим водородосодержащим газом (ВСГ).
Постоянство расхода сырья в тройник смешения поддерживается автоматически регулятором расхода, клапан которого расположен на линии подачи сырья к щиту смешения.
Количество циркулирующего газа, подаваемого с выкида компрессоров ПК-1 (2) на щит смешения, контролируется по показаниям регистрирующего прибора. Сигнал на блокировку по уменьшению расхода циркуляционного водородсодержащего газа поступает от ОПС.
Температура циркуляционного водородсодержащего газа контролируется в САУ, от термопреобразователей, установленных на линии всасывания компрессоров ПК-1,2 и на линии нагнетания компрессоров ПК-1,2.
Давление на линии всасывания компрессоров ПК-1,2,3 контролируется в САУ, на линии нагнетания - манометрами.
Газосырьевая смесь из узла смешения поступает в межтрубное пространство теплообменников Т-1, 2, 3, 4, где нагревается до температуры 290оС за счет тепла газопродуктовой смеси. После теплообменников газосырьевая смесь поступает в печь П-1, где нагревается до температуры реакции 350-4250С.
Температура сырья на выходе из печи П-1 поддерживается автоматически клапанами-регуляторами температуры, которые установлены на линиях подачи топливного газа на форсунки.
Из печи газосырьевая смесь в газожидкостной фазе поступает в два последовательно работающих реактора Р-1, Р-2. Температура в зонах реакции контролируется по показаниям регистрирующих приборов поз.TI 1012, TI 1013, TI 1014, TI 1015, получающих импульсы от двух многозонных термопар в Р-1 и Р-2.
Газопродуктовая смесь выходит из последнего реактора с температурой 350 – 425 оС и направляется в трубное пространство теплообменников Т-4, 3, 2, 1. Из подогревателей Т - 4, 3, 2, 1 газопродуктовая смесь с температурой 1600С поступает в АВГ (секции 2, 3, 4, 5, 11, 12, 13, 14), где охлаждается до температуры 50оС и далее направляется в сепаратор высокого давления С-1.
В сепараторе С-1 при давлении до 42 кгс/см2 происходит разделение гидрогенизата и водородосодержащего газа.
Водородосодержащий газ, насыщенный сероводородом, поступает на очистку от сероводорода в абсорбер К-4.
Очищенный от сероводорода циркулирующий газ с верха абсорбера К-4 направляется на щит отдува и в сепаратор С-7, откуда забирается компрессорами ПК-1 (2) и вновь подается на щит смешения.
Избыток ВСГ сбрасывается со щита отдува в топливную сеть завода или на дежурные горелки ГФХ.
С целью уменьшения перепада давления между приемом и выкидом компрессоров ПК-1 (2) часть циркулирующего ВСГ с выкида компрессора перепускается через кожухотрубный холодильник Х-3. Подача свежего ВСГ предусматривается с установок 35/11-300, 35/11-600 в линию циркуляционного газа из К-4 в С-7 или в линию выхода газопродуктовой смеси из АВГ (секции 2, 3, 4, 5, 11, 12, 13, 14) в С-1. По отдельному трубопроводу в эти же линии осуществляется подача «свежего» ВСГ с установки 35/6.
Постоянство давления в системе реакторного блока поддерживается автоматически регулятором давления, клапан которого расположен на линии очищенного циркулирующего газа из К-4 на щит отдува.
Общие сведения о компрессорной установке, ее составе, назначении отдельных узлов и принципов построения автоматизированной системы
В состав стационарной компрессорной установки входят: поршневой крейцкопфный компрессор, электродвигатель, а также системы охлаждения, смазки, автоматического управления и защиты.
Компрессор:
поршневой крейцкопфный с оппозитным или угловым расположением цилиндров. Конструкции компрессоров построены на основе принятых, на заводе-изготовителе нормальных параметрических рядов диаметров цилиндров. Основой параметрических рядов являются оппозитная база 4M и угловые базы 5П и 2П, однако встречаются и специально разработанные системы для ориентированного производства типа 5ГЦ, 5РЦ.
Компрессор включает следующие основные узлы: базу, цилиндры, систему охлаждения и привод.
База:
состоит из унифицированных узлов кривошипно-шатунного механизма (коленчатого вала, шатуна и крейцкопфа), рамы, блока смазки механизма движения и многоплунжерного насоса (для смазки цилиндров и уплотнительных устройств штоков). В компрессорах без смазки многоплунжерный насос (смазочная станция) отсутствует.
Рама:
чугунная литая, коробчатой формы, с внутренними ребрами усиления. В верхней части рамы предусмотрены плотно закрываемые крышками люки, обеспечивающие доступ к деталям механизма движения. Нижняя часть рамы служит резервуаром для масла. На верхней части рамы установлен указатель уровня масла. Для крепления цилиндров компрессора к раме имеются специальные приливы. В отверстиях поперечных ребер рамы установлены крейцкопфные чугунные гильзы, служащие направляющими для крейцкопфов. Гильзы в случае износа могут быть повернуты или заменены новыми.
Коленчатый вал:
стальной штампованный, с кривошипами для установки шатунов, опирается на роликовые подшипники (для угловых баз коленчатый вал выполняется однокривошипным, для уравновешивания на вал устанавливаются противовесы). На одном конце коленчатого вала установлен ротор электродвигателя (соединение шпоночное), а в закрепленном на торце вала фланце выполнено квадратное отверстие для обеспечения проворачивания вала компрессора с помощью рукоятки перед запуском. (Рукоятка входит в комплект ЗИП). На другом конце вала крепится шестерня для передачи вращения валу масляного насоса блока смазки.
Крейцкопфы:
чугунные или алюминиевые литые или штампованные, изготовляются заодно с ползунами. Крейцкопф соединен со штоком закладной гайкой и контргайкой, законтренными стопорными болтами. С шатунами крейцкопф соединяется посредством пальца.
Пальцы крейцкопфов:
стальные, при сборке запрессовываются в крейцкопф и стопорятся пружинными кольцами.
Шатуны:
стальные штампованные двутаврового сечения. Шатун имеет кривошипную головку с отъемной крышкой и неразъемную крейцкопфную головку. Разъемные вкладыши кривошипной головки с антифрикционным слоем из алюминиевого сплава. В крейцкопфную головку запрессована бронзовая втулка. Смазка пальца крейцкопфа осуществляется через отверстие шатуна.
Крышка кривошипной головки шатуна соединяется со стержнем шатуна, двумя шатунными болтами легированной стали и гайками. На головке каждого шатунного болта указывается его начальная длина, необходимая для оценки остаточного удлинения болта за время эксплуатации.
Цилиндры:
в зависимости от схемы компрессорных машин могут быть одно-, двух- или трехступенчатыми, простого или двойного действия, с уравнительной полостью или без нее.
Одноступенчатые компрессоры имеют цилиндры двойного действия одинакового диаметра.
В двухступенчатых компрессорах установлены цилиндры двойного действия разного диаметра.
В трехступенчатых — цилиндр первой ступени двойного действия, цилиндры второй и третьей ступеней объединены в одном блоке, с дифференциальным поршнем и уравнительной полостью между ступенями.
В четырехступенчатых применяются два цилиндра с дифференциальным поршнем и уравнительной полостью. В пятиступенчатых в одном ряду установлен цилиндр с двумя, а в другом с тремя ступенями сжатия, при этом поршень первой ступени двойного действия.
В шестиступенчатых компрессорах установлены два цилиндра, каждый с тремя ступенями сжатия, цилиндры первой и второй ступеней — чугунные литые с охлаждающими рубашками.
Цилиндры последующих ступеней многоступенчатых компрессоров изготовлены из различных материалов в зависимости от рабочего газа и конечного давления, большинство имеют сменные рабочие гильзы из специального износостойкого чугуна, уплотняемые по диаметру резиновыми кольцами, а по торцу паронитовыми прокладками. Клапаны (всасывающие и нагнетательные): самодействующие пластинчатые кольцевые, прямоточные и ленточные закрепляются в гнездах нажимным стаканом и упорными болтами или нажимными шпильками с колпачковыми гайками. В ступенях высокого давления устанавливаются комбинированные клапаны, состоящие из всасывающих и нагнетательных клапанов.
Уплотнение:
цилиндров, люков, клапанных крышек и фланцевых соединений достигается применением паронитовых прокладок, а на ступенях высокого давления устанавливаются прокладки из мягкой (отожженной) меди.
Поршни:
из чугуна, алюминия или стали. На одно- и двух- ступенчатых компрессорах – дисковые, двойного действия, на многоступенчатых дифференциальные.
Поршневые кольца:
чугунные. В компрессорах без смазки цилиндров применяются кольца из самосмазывающихся композиционных материалов.
Штоки:
из углеродистой стали с поверхностным уплотнением.
Стандартная схема исполнения поршневого компрессора представлена на рис. 1.6.1
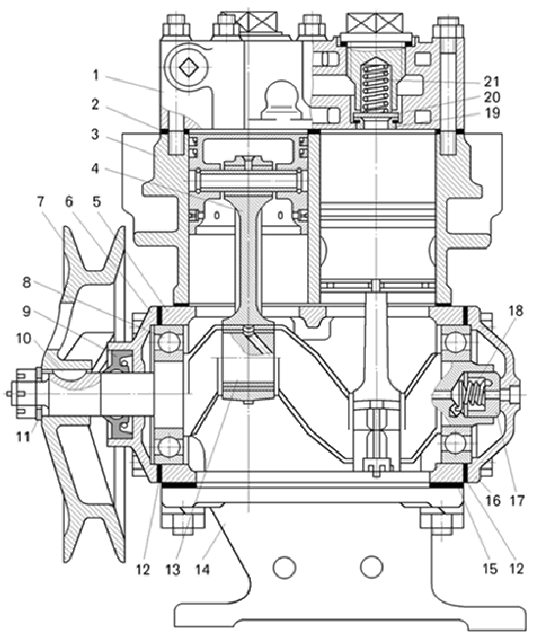
Рис.1.6.1 - Стандартная схема исполнения поршневого компрессора:
1 - головка блока цилиндров;2 - прокладка головки блока; 3 - блок цилиндров; 4 - шатун; 5 - картер; 6 - передняя крышка; 7 - шкив; 8 - шарикоподшипник; 9 - уплотнительная манжета; 10 - шпонка; 11 - шайба;12, 15 - прокладки; 13 - коленчатый вал; 14 - нижняя крышка картера; 16 - задняя крышка; 17 - уплотнитель; 18 - пружина уплотнителя; 19 - седло; 20 - нагнетательный клапан; 21 - пружина клапана;
Основные виды привода компрессора в данной области
Пуск осуществляется от электродвигателя, ротор которого насаживается на вал компрессора, а статор крепится к раме компрессора.
В зависимости от базы компрессора сжимаемого агента (воздух или различные газы) применяются следующие электродвигатели:
1) Воздушные компрессоры на базе 4М
־ двухскоростного асинхронного электродвигателя А2К 85/24-8/16 160/75 кВт, 750/375 об/мин (синхр.), 380 В, 50 Гц.
Пуск двигателя осуществляется при полном напряжении сети при разгруженном компрессоре.
Переход из состояния покоя на частоту вращения 6 с-1 (360 об/мин) – ступенчатым переключением обмотки статора.
Двигатель допускает два пуска подряд на частоту вращения 6,17 с" (370 об/мин) из холодного состояния или один пуск из горячего. Количество пусков в час не более пяти и интервалом не менее 12 мин. Общее количество пусков в год не более 10000. Количество изменений частоты вращения не более 20 в час с интервалом не менее 3 мин.
2) Воздушные компрессоры на базе 5П:
־ синхронного бесщеточного электродвигателя
БСДКМ 15-21-12200 кВт, 500 об/мин, 380 В, 50 Гц;
־ асинхронного электродвигателя АСК 560-12200 кВт, 500 об/мин, 380 В, 50 Гц;
3) Воздушные компрессоры на базе 2П:
־ асинхронного электродвигателя АВ2-101-8 75кВт, 735 об/мин, 380 В, 50 Гц;
Газовые компрессоры на базах 4М, 5П, 2П, 5ГЦ комплектуются электродвигателями во взрывозащищенном продуваемом исполнении «2ExpllTS» (H4TS-П) с аналогичными характеристиками.
Все электродвигатели комплектуются пусковой аппаратурой.
Условные обозначения.
Условное обозначение компрессоров отражает основные характеристики и параметры машины:
Для компрессоров на оппозитной базе 4М
цифра «2», стоящая непосредственно перед буквами «ВМ», «ГМ» и «НП», указывает на то, что компрессор двухрядный;
буквы «ВМ», «ГМ» и «НП» означают, что компрессор предназначен для сжатия воздуха, водорода или невзрывоопасного газа и выполнен на оппозитной базе;
цифра «4», стоящая после букв «ВМ», «ГМ» и «НП», указывает номинальную нагрузку на шток в «тс»;
за цифрой «4» дробью указаны производительность в м3/мин (числитель) и конечное абсолютное давление сжатия в кгс/см' (знаменатель), Для дожимающих компрессоров в знаменателе указываются давления всасывания нагнетания, абс., кгс/см2;
буква «С» означает, что компрессор выполнен без смазки цилиндров и относительная влажность сжимаемого газа должна быть не менее 30%;
«M1», «М2» означает порядковый номер или модернизации.
Буква «С», стоящая непосредственно перед буквами «ГМ» и «НП», указывает на то, что относительная влажность сжимаемого газа не более 30%.
Например: 2СНМ4-24/9CM2 УХЛ4 компрессорная установка двухрядная, для сжатия нейтрального газа относительной влажностью менее 30%, оппозитная, с усилием на штоке поршня 4 тс, производительностью 24 м3/мин, абсолютным конечным давлением 9 кгс/см', работает без смазки цилиндров и уплотнительных устройств, модернизированная.
Климатическое исполнение компрессорной установки — УХЛ4 по ГОСТ 15150-69.
Для компрессоров на угловых базах 5П и 2П:
буквы «ВП» или «ГП» указывают, что компрессор предназначен для сжатия воздуха («В») или газа («Г») и выполнен по прямоугольной схеме («П»);
цифры «2» и «5», стоящие непосредственно перед буквами «ВП», указывают номинальную нагрузку на шток в «тс»;
за буквами «ВП» или «ГП» дробью указаны производительность в м'/мин (числитель) и избыточное конечное давление нагнетания в кгс/см2 (знаменатель);
цифра, стоящая первой, указывает порядковый номер модификации.
Смазка компрессоров:
осуществляется двумя независимыми системами:
־ системой смазки низкого давления (циркуляционной) для подачи масла к механизму базы;
־ системой смазки высокого давления для подачи масла в цилиндр
1. Система смазки низкого давления:
масло заливается в нижнюю часть рамы компрессора. Оттуда через сетчатый фильтр грубой очистки, расположенный в начале масловсасывающей трубы, шестеренчатым насосом подается в блок смазки и далее через напорную трубу во внутренний канал коленчатого вала, который имеет подводы масла на рабочую поверхность кривошипных шеек и к шатунам. Для предотвращения подтекания масла из рамы компрессора на подшипниках коленчатого вала устанавливаются уплотнительные устройства. Масло заливается в раму через одну из люковых крышек; уровень его измеряется стержневым маслоуказателем. Для слива масла из рамы предусмотрен сливной кран.
2. Система смазки высокого давления:
Привод многоплунжерного насоса осуществляется от ведущего валика шестеренчатого насоса блока смазки механизма движения. Масло, пройдя через плунжерный насос, поступает к отверстиям в крышках и гильзах цилиндров, равномерно распределяется по поверхностям трения, обеспечивая смазку.
Контроль подачи масла к цилиндрам через смотровое окно насоса. Для смазки механизма движения могут применяться масла марок И-50А (ГОСТ 20799-75) и MC-20 (ГОСТ 21743-76) К-310 TУ38.401479-84; ИГП-49 ТУ38.101413-90; для цилиндров и уплотнительных устройств масло К-12, К-19 ГОСТ 1861-73 и MC-20 в зависимости от марки компрессора.
В компрессорах без смазки цилиндров система смазки высокого давления с подачей масла в цилиндры и к уплотнительным устройствам не предусмотрена, На таких компрессорах лубрикаторы отсутствуют. Поршни этих компрессоров имеют опорные и разрезные (из двух половин) кольца из самосмазывающихся материалов на основе фторопласта с различными наполнителями.
В компрессорах, предназначенных для сжатия воздуха и влажных газов, поршневые кольца выполняются из фторопласта 4К20. Если давление сжимаемого газа до 0,8 МПа (8 кгс/см'), допускается изготовление колец из материала АФГ-80С, при работе с осушенными газами применяется фторопласт с графитом и дисульфидом молибдена АФГМ или ГФЭ-5м.
Для предотвращения попадания масла из рамы в полость сжатия, каждый цилиндр в компрессорах без смазки цилиндров снабжен фонарем, маслослизывающим уплотнительным устройством, маслоотбойником и маслослизывающими кольцами.
Охлаждение компрессоров:
водяное. Компрессоры поставляются с открытой системой охлаждения (слив воды из компрессора и газоохладителей с разрывом струи через сливные воронки).
При эксплуатации компрессоров с закрытой системой охлаждения должны выполняться требования «Правил устройства и безопасной эксплуатации стационарных компрессорных установок, воздуховодов и газопроводов», утвержденных Госгортехнадзора РФ от 5 июня 2003 г. N 60, для воздушных компрессоров и «Правил устройства и безопасной эксплуатации компрессорных установок с поршневыми компрессорами, работающими на взрывоопасных и вредных газах», ПБ 09-297-03 для газовых компрессоров.
Качество охлаждающей воды должно соответствовать требованиям вышеназванных правил.
Система автоматики:
предназначена для управления работой, защиты и контроля параметров компрессорных машин.
Система автоматики состоит из ряда подсистем и в совокупности с электроприводом в зависимости от предназначения компрессорных машин (для сжатия воздуха или газа) осуществляет аварийное прекращение работы компрессорной установки с остановкой приводного электродвигателя;
1) в компрессорных установках для сжатия газа:
а) при понижении давления воды в системе охлаждения компрессора;
b) при коротких замыканиях и повреждениях в системе электропривода и управления;
с) при падении давления масла в циркуляционной системе смазки механизма движения;
d) при отклонениях давления газа от допустимых значений на линии всасывания;
е) при повышении давления газа выше допустимого после каждой ступени сжатия;
f) при прекращении продувки воздухом корпуса электродвигателя;
g) при повышении давления газа выше допустимого в корпусе компрессора.
Аварийное отключение электродвигателя компрессоров сопровождается подачей светового и звукового сигналов.
В системе автоматики компрессорных машин для сжатия газа предусмотрена дистанционная пневматическая передача показаний контролируемых параметров на приборы релейного шкафа. Расстояние передачи выходного сигнала на пневмотрассе не более 200 м.
Кроме того, системы автоматики компрессоров отличаются в зависимости от модификации функциональными возможностями и элементной базой (релейной, микроэлектронной, микропроцессорной).
Системы автоматики выпускаются в климатическом исполнении У при эксплуатации в помещении для изделий 4 ГОСТ 15150-69.
Технические параметры режима работы компрессорной установки
Таблица 1.1
| Наименование показателей режима | Единица измерения | Допустимые пределы технологических параметров |
Требуемый класс точности измерительных приборов ГОСТ 8.401-80 |
Примечание |
| Давление масла на ПК-1 |
кгс/см2 |
1,2 – 3,0 | 1,0 | Регистр. |
| Давление воды на охлаждение масла |
кгс/см2 |
1,0 – 3,0 | 1,0 | Регистр. |
Температура газа на приеме ПК -1 |
0С |
110 | 0,5 | Регистр. |
| Температура подшипников, не более ПК-1 |
0С |
65 | 1,0 | Регистр. |
| Давление воздуха на обдув электродвигателя компрессора | Мм.вод.ст. | 20 - 40 | 1,0 | Регистр. |
| Перепад давления между приемом и выкидом, не более | 1,8 | 1,0 | Регистр. | |
| Расход циркуляционного газа |
Нм3/час |
20000 - 40000 | 1,0 | Регистр. |
| Температура газа на нагнетании ПК-1 |
0С |
110 | 0,5 | Регистр. |
Показатели режима
Таблица 1.2
Краткая характеристика технологического оборудования
|
Наименование оборудования (тип, наименование аппарата, назначение) |
Номер позиции прибора по схеме, индекс |
Кол-во, шт. | Материал | Техническая характеристика |
| Ресивер азота высокого давления на приеме компрессоров. Вертикальный, цилиндрический аппарат, пустотелый, со сферическими днищами | Б-2 | 1 | Ст. 20 |
Расчетное давление - 64 кгс/см2 Расчетная температура - 40оС Диаметр – 1000 мм Высота - 4000 мм Объем - 4 м3 |
| Сепаратор на приеме ПК. Горизонтальный, цилиндрический, пустотелый аппарат со сферическими днищами |
С-7 С-5 |
2 | Ст.20 |
Расчетное давление - 50 кгс/см2 Диаметр –2000 мм Длина – 7400 мм Объем -20м3 |
| Компрессор для циркуляции ВСГ | ПК-1 | 3 | Сборный |
Марка 5Г-600-42/60 Расход -36000м3/час Давление на приеме -42кгс/см2 Давление на выкиде -60кгс/см2 Мощность ЭД –840 кВт Число оборотов -167 об/мин Исп. ВЗГ |
| Холодильник циркуляционного газа. Горизонтальный, цилдиндр кожухотрубный аппарат, одноходовой по трубному и межтрубному пространству |
Х-3 Х-4 |
2 | Ст.3 |
Расчетное давление в корпусе -60кгс/см2, в трубках - 3 кгс/см2 Температура в корпусе - 60оС, в трубках - 40оС Диаметр корпуса - 425 мм Длина - 6877 мм |
Таблица 1.3
Перечень блокировок и сигнализации
|
Наименование параметра |
Наименование оборудования |
Величина устанавливаемого параметра | Блокировка | Сигнализация | Операции по отключению, переключению и другому воздействию | |||
| Температура газа нагнетания ПК-1 | ПК-1 |
110 0С |
120 0С |
110 0С |
Звуковая и световая сигнализация. Отключение ЭД компрессора ПК-1 |
|||
| Температура подшипников ПК-1 | Подшипники ПК-1 |
60 0С |
65 0С |
60 0С |
Звуковая и световая сигнализация. Отключение ЭД компрессора ПК-1 |
|||
| Давление масла к ПК-1 | ПК-1 | 0,15 МПа | 0,12 МПа | 0,15 МПа |
Звуковая и световая сигнализация. Запрет пуска Отключение ЭД компрессора ПК-1 |
|||
| Давление охлаждающей воды к ПК-1 | ПК-1 | 0,12 МПа | 0,1 МПа | 0,12 МПа |
Звуковая и световая сигнализация. Запрет пуска Отключение ЭД компрессора ПК-1 |
|||
| Давление воздуха под кожухом ПК-1 | ПК-1 | 0,25 МПа | 0,2 КПа | 0,25 КПа |
Звуковая и световая сигнализация. Запрет пуска Отключение ЭД компрессора ПК-1 |
|||
| Перепад давления на ПК-1 | ПК-1 | 1,8 МПа | 2,0 МПа | 1,8 МПа |
Звуковая и световая сигнализация. Отключение ЭД компрессора ПК-1 |
|||
| Давление ВСГ на всасе ПК-1 | ПК-1 | 1,5 МПа | 0,5 МПа | 1,5 МПа |
Звуковая и световая сигнализация. Запрет пуска Отключение ЭД компрессора ПК-1 |
Контрольно-измерительные приборы
Для визуального наблюдения рабочего состояния компрессорной установки непосредственно на контрольных точках установлены дисплеи, отображающие значения измеряемых величин:
־ Датчики давления оснащены ЖК панелями, на которых выводятся параметры, контролируемые операторами;
־ Местные терморезистивные датчики по желанию заказчика оснащаются дисплеями и функциональным полем.
־ Датчики вибрации и система слежения состояния вала компрессора не имеют средств отображения параметров, однако на них размещены световые индикаторы отслеживания параметров.
2. РАЗРАБОТКА СИСТЕМЫ УПРАВЛЕНИЯ КУ
Распределенная автоматизированная система управления (РСУ) технологическим процессом компрессорной представляет собой совокупность технических средств, предназначенных для мониторинга и управления технологическим процессом. Базовым техническим средством данной системы управления является многоконтурный контроллер DeltaV серии M5+.
Верхний уровень данной РСУ представляет собой операторскую станцию на основе персонального компьютера с программным обеспечением DeltaV.
К основным функциям операторской станции можно отнести: мониторинг технологических параметров, управление, возможность записи и хранения истории по важным технологическим параметрам, организация оповещающей сигнализации, фиксации команд оператора и оповещающей сигнализации в журнале событий, возможность отображения истории параметров в виде графиков, организация технологических отчетов, также ряд других сервисных функций.
2.1 Структура системы управления
АСУ ТП предназначена для выполнения следующих задач:
־ Автоматизированного контроля и управления в реальном масштабе времени технологическим процессом сжатия и транспортировки газа, а также поддержание его на регламентированном уровне;
־ Обеспечение высокого уровня безопасности технологического процесса:
־ Постоянство анализа динамики изменения параметров в сторону критических значений и прогнозирование возможных аварийных ситуаций;
־ Проведение операций безаварийного пуска, останова и всех необходимых для этого переключений;
־ Действий средств управления и проектируемых автоматизированных защит, прекращающих развитие аварийных ситуаций;
־ Система управления реализовывает непрерывный контроль за состоянием и режимами работы технологического оборудования и агрегатов, предупредительную и аварийную сигнализацию при отклонении режимных параметров от регламентированных норм и установок, дистанционное управление исполнительными механизмами, противоаварийную защиту технологического оборудования и объектов, расчет технико–экономических показателей, архивирование информации, формирование и печать технологических протоколов, аварийных сообщений и отдельных документов.
АСУ ТП компрессорной установки представлена как иерархическая система оперативного контроля и управления, располагающаяся в центральной операторной.
Иерархическая структура АСУ ТП обеспечивает следующие уровни управления:
־ Уровень оперативно-производственной службы (ОПС) – верхний уровень АСУ ТП;
־ Уровень системы автоматизированного управления (САУ) технологическими объектами – нижний уровень АСУ ТП;
Уровень оперативно-производственных служб
Уровень оперативно-производственных служб предназначен для:
־ Формирования человека -машинного интерфейса;
־ Регистрации и визуализации состояния технологических объектов;
־ Управление в реальном масштабе времени;
־ Сигнализация отклонения параметров технологического процесса от регламентных предупредительных и предаварийных границ;
־ Дистанционное управление исполнительными механизмами и электроприводами агрегатов;
־ Регистрации в базе данных, архивирования событий и изменения значений технологических параметров;
־ Формирование и печати технологических сводок, учетных и отчетных документов.
На данном уровне оперативно-технологическим персоналом, с использованием аппаратно-программных средств АСУ ТП, осуществляется оперативный контроль за текущим состоянием и режимами работы основных и вспомогательных технологических процессов, а также выдача установок по регулированию технологических параметров.
Уровень системы автоматизированного управления
Технологическими средствами данного уровня осуществляется автоматический контроль и управление процессами, поддержание заданных режимов работы, аварийная защита оборудования; и обмен информацией с вышестоящим уровнем.
На данной уровне обеспечивается реализация следующих функций:
־ Измерение технологических параметров;
־ Автоматическое управление режимами работы технологического оборудования;
־ Управление исполнительными механизмами;
־ Контроль безопасности и аварийная защита технологического оборудования.
АСУ ТП включает в себя функционально выделенную систему противоаварийной автоматической защиты (ПАЗ). Система ПАЗ обеспечивает распознавание аварийной ситуации (выход за аварийные пределы технологических параметров) и автоматический перевод технологического оборудования в безопасное состояние. Отработка алгоритмов ПАЗ сопровождается формированием и выдачей оперативно-технологическому персоналу световой и звуковой сигнализации. Основная схема, реализующая данный алгоритм представлена на рис. 2.1
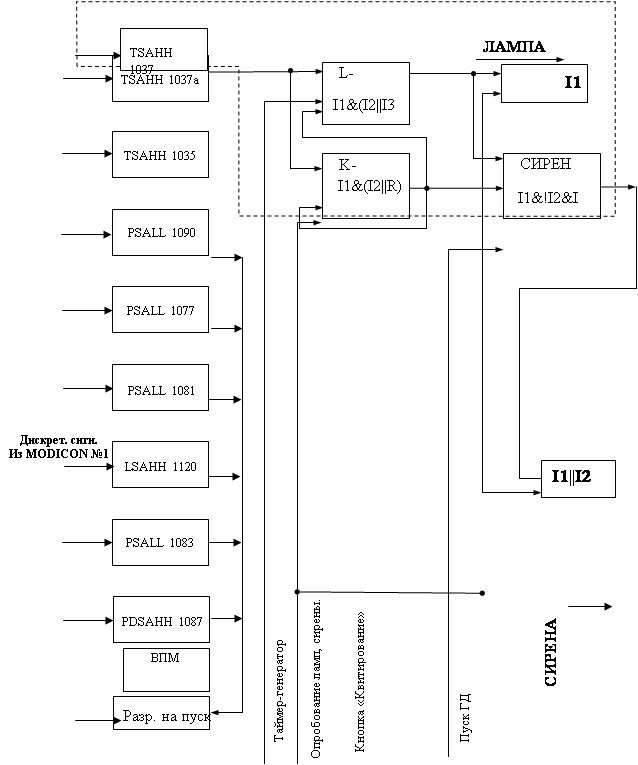
Рис. 2.1 - Логическая схема блока сигнализации и разрешения на пуск компрессора ПК-1
Функционально выделенная система ПАЗ находится в состоянии ожидания на любом этапе пуска, работы и остановки компрессора, в результате чего, перевод системы на безопасный режим осуществляется независимо от состояния системы при условии наличия критического порога, основные параметры которого сведены в таблицу 1.3. Ввиду сложности и большой динамики технологического процесса большое внимание уделяется надежности системы.
2.2 Надежность системы ПАЗ обеспечивается:
־ Аппаратным резервированием (дублированием);
־ Временной и функциональной избыточностью;
־ Наличием систем диагностики и самодиагностики;
־ Охранными порогами перехода системы.
Для обеспечения бесперебойной работы оборудования АСУ ТП электроснабжение производится через источник бесперебойного питания (ИБП). ИБП обеспечивает функционирование системы до переключения фидера питания или на время необходимое для перевода технологического объекта в безопасное состояние.
Применение искробезопасных барьеров защиты при работе современных систем АСУ ТП, работающих на объектах с взрывоопасными средами и построенных на электронных средствах контроля и измерения, является необходимым условием, т.к.: при обрывах в цепях измерений сигналов 4-20мА уровень напряжения в цепи датчика будет равным напряжению источника питания, что витиевато возникновением пожара. Поэтому для искробезопасных барьеров устанавливается порог срабатывания равным 24В. При превышении уровня 24В напряжения источника питания возникает ток утечки в диапазоне 0-4мА, дающий ложный сигнал целостности цепи.
Для предотвращения этого в систему, контролирующую обрыв в цепи датчиков сигналов 4-20мА, напряжение источника питания цепи датчика устанавливать ниже порога защиты срабатывания искробезопасных барьеров защиты на 0,2-0,3В или устанавливать последовательно в цепь источника питания диод. Выбор диода и схема подключения может быть реализован, исходя из рис. 2.2
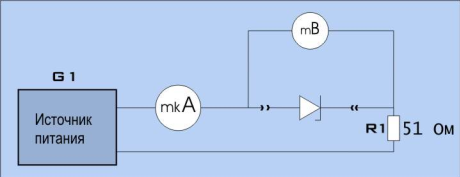
Рис. 2.2
САУ КУ должна удовлетворять требованиям безопасности, охраны труда и производственной санитарии в соответствии с ГОСТ 12.2.003 и Законом РФ «Об охране труда».
Электрооборудование САУ КУ должно отвечать требованиям «Правил устройства электроустановок», «Правил техники безопасности при эксплуатации электроустановок до 1000В», ГОСТ12.2.007.0 и ГОСТ12.2.007.1.
Оборудование САУ КУ должно иметь специальные болты для подключения к системе заземления (см. п.п. 7.2). Заземляющие болты должны иметь маркировочный знак по ГОСТ 2.751.
Сигнальные цвета, размеры, форма и цвет знаков безопасности должны соответствовать ГОСТ 12-4.026.
2.3 Определение основных задач синтеза системы управления КУ
В соответствии с параметрами режима работы, указанных в таблице 1.1, выделим основные задачи управления КУ. Для упрощения логической схемы системы управления весь цикл работы был разбит на функциональные модули, в каждом из которых выполняются свои операции и регистрируются нормативные значения технологических параметров. Весь цикл работы сводится к соблюдению режимов переключения между модулями.
Рассмотрим каждый из них отдельно.
1. Алгоритм пуска компрессора
Пуск компрессора 5ГЦ осуществляется подачей электропитания на электродвигатель. Поэтому данным алгоритмом "Пуска компрессора" предусматривается выполнение всех необходимых операций подготовки к пуску, контроль предпусковых параметров и условий и выдача на "верхний уровень" в систему управления компрессорной установкой сигнала о готовности компрессора к пуску: "Компрессор к пуску готов".
Если хотя бы один параметр или условие не удовлетворяют предпусковым требованиям, сигнал "Компрессор к пуску готов" не должен формироваться. Сигнал о готовности компрессора к пуску должен быть сформирован системой КиПа в виде "сухого контакта", выдаваемого на "верхний уровень", с одновременным выводом на дисплей компьютера надписи "Компрессор к пуску готов" вместо надписи "Подготовка компрессора к пуску".
1.1 Сигнал "Компрессор к пуску готов" должен формироваться при выполнении следующих предпусковых требований:
1.1.1 Давление газа на входе в стойку управления (РТ1), изб., не менее 6,2 кгс/см2;
1.1.2 Давление масла в напорном коллекторе (ВР108), изб., не менее 1,5 кгс/см2;
1.1.3 Температура масла в напорном коллекторе (ВК2), не более 450С.
1.2 В процессе подготовки компрессора к пуску система КиПа должна производить пуск основного маслонасоса при выполнении следующих условий:
При не выполнении хотя бы одного из этих условий система КиПа не должна позволять пуск маслонасоса (блокировать пуск маслонасоса) и должна выводить на дисплей оператора сигнал "Запрет пуска маслонасоса по РТ4 менее 1,5 кгс/см2.
Выбор основного насоса осуществляется путем считывания часов наработки каждого из насосов и включение потока, переключающим цепи управления маслонасосами (выбор осуществляется только при неработающих маслонасосах).
При включении маслонасоса на мнемосхеме должна загораться световая индикация о его включении.
1.3 Момент начала пуска компрессора фиксируется по сигналу из САУ компрессорной установки в виде "сухого контакта" или по достижению частоты вращения ротора значения 300 об/мин. В процессе пуска система КиПа должна контролировать параметры в соответствии с таблицей 1.1 с записью их в память на жесткий диск компьютера и указанием времени пуска. Нормальный пуск (без применения тиристорной системы управления эл. приводом) осуществляется в течении 8¸30 секунд, с момента начала пуска и до выхода на номинальный режим по частоте вращения ротора. На это время уставки на срабатывание предупредительной сигнализации и аварийной защиты должны программно удваиваться по следующим параметрам:
- радиальное виброперемещение шеек ротора (S1B, S1Г, S2B, S2Г);
- осевой сдвиг (OS1, OS2).
1.4 Окончание пуска компрессора и выход его на номинальный режим работы фиксируется системой КиПа по достижению частоты вращения ротора (n) значения 8412 об/мин.
По окончании пуска на дисплей оператора должна выводиться надпись "Работа компрессора".
1.5 При срыве пуска, когда зафиксировано начало пуска по достижению частоты вращения ротора значения 300 об/мин, а фиксации окончания пуска по достижению частоты вращения ротора значения 8412 об/мин не происходит, возможны два варианта развития событий:
1) частота вращения ротора достигла значения 0±10 об/мин. Это означает, что произошел останов компрессорной установки и система КиПа должна отреагировать по алгоритму аварийного останова;
2) частота вращения ротора "зависла" между значениями 0 и 8412 об/мин. Система КиПа должна работать по алгоритму "Пуск компрессора", т.е. ожидать фиксации окончания пуска или аварийного останова.
Вывод: из анализа алгоритма следует, что успешное начало работы зависит как от межмодульных параметров, так и характеристик самой системы (в основном, системы охлаждения и пусковых элементов двигателя).
2. Алгоритм нормальной работы компрессора
В процессе нормальной работы компрессора система КиПа контролирует значения параметров, представленных в таблице 1.1 к настоящим алгоритмам, и обеспечивает возможность вывода текущего значения любого параметра на дисплей в виде графика, в т.ч. группового, и в виде таблицы текущих значений параметров по соответствующей команде оператора.
Через каждые 8 (12) часов работы компрессора система КиПа должна автоматически записать значения контролируемых параметров в память на жесткий диск компьютера.
В процессе работы компрессора система управления должна производить включение резервного маслонасоса в случае снижения давления масла в напорном коллекторе (ВР108) до значения 1,4 кгс/см2 изб. и выключение его при достижении давления ВР108 значения 2,0 кгс/см2.
Сигналом для включения резервного маслонасоса может быть и отключение основного маслонасоса (например: сработала защита эл. привода маслонасоса по перегрузке). В этом случае должен тут же включиться резервный насос. Включение резервного маслонасоса должно происходить по возможности быстрей для того, чтобы не успела сработать аварийная защита по давлению масла в напорном коллекторе.
Однако при срабатывании должна включиться световая и звуковая сигнализация в операторном помещении. Если сработала сигнализация по нескольким параметрам одновременно или последовательно, то каждая из них записывается в своей строке.
При возвращении значения параметра в пределы нормы световая и звуковая сигнализация должны отключиться.
3. Алгоритм нормального останова компрессора
Нормальный останов компрессора, как и пуск, производится независимо от состояния компрессора и системы управления отключением эл. питания привода.
Начало нормального останова может быть зафиксировано по сигналу из САУ компрессорной установки в виде "сухого контакта" или по уменьшению частоты вращения ротора (n) на 10% от номинального значения, т.е. по достижению значения 7570 об/мин. При фиксации начала процесса нормального останова должны быть удвоены уставки на срабатывание предаварийной сигнализации и аварийной защиты по вибрационным параметрам компрессора: радиальному виброперемещению шеек ротора (S1B, S1Г, S2B, S2Г) и осевому сдвигу (OS1, OS2. В процессе нормального останова система управления должна контролировать все параметры в соответствии с таблицей 1.1 с записью их в память на жесткий диск компьютера с указанием времени останова. Запись значений параметров в память должна прекращаться по достижению нулевой частоты вращения ротора (0±10 об/мин). С 5 минутной задержкой после прекращения вращения ротора должен автоматически отключиться работающий (основной или резервный) маслонасос.
Процесс останова компрессора может считаться законченным, если маслонасос отключен, давление масла в напорном коллекторе (ВР108) равно 0±0,05 кгс/см2
4. Алгоритм аварийного останова компрессора
Аварийный останов компрессора может производиться по двум причинам:
1) по параметрам, не входящим в состав системы управления компрессора (параметры компрессора не выходят за пределы нормы);
2) по одному или нескольким параметрам компрессора, входящим в систему управления компрессора, значения которых вышли за пределы аварийных уставок (защит).
Аварийный останов по первой причине производится в точном соответствии с алгоритмом нормального останова.
При срабатывании аварийной защиты по параметру компрессора система управления должна выдать на "верхний уровень" (в САУ установки) сигнал в виде "сухого контакта" на аварийный останов компрессора (на отключение питания эл. привода), включить световую и звуковую сигнализацию в операторном помещении
В остальном аварийный останов производится по алгоритму нормального останова с дополнением при записи параметров в память причины останова (с указанием параметра, по которому сработала защита).
2.4 Временные параметры управления
Система управления должна постоянно контролировать свое собственное состояние и работоспособность отдельных элементов: датчиков, вторичных приборов, блоков питания и т.д. и при необходимости выдавать на дисплей оператора соответствующую информацию.
Алгоритм самодиагностики системы управления разрабатывается в соответствии функциональными нормами, временными характеристиками и из соображения безопасности.
Частота опроса датчиков должна составлять:
- для виброаппаратуры серии ТХ 3654 – 10 000 раз в секунду;
- для датчиков давления Rosemount – не менее 12 раз в секунду;
- для датчиков температуры – не менее 1 раза в секунду;
Частота смены значений параметров на дисплее, в таблице параметров и на групповых графиках – один раз в секунду.
При отказе любого одного датчика на дисплей оператора (в правом нижнем углу) должна выводиться информация в табличном виде об отказе соответствующего датчика и должна включаться предупредительная сигнализация (световая и звуковая).
2.5 Особенности характеристик систем управления
Основным направлением в регулировании потока систем подобного типа является иерархическая завершенность, или обоснованность совмещения оборудования. Данный принцип позволяет пренебречь значениями факторов, оказывающее значительное воздействие на систему. Основные критерии принципа сводятся к разработке системы пуска и поддержания параметров:
1. Регулирование нагнетателей путем изменения частоты вращения Механизм регулирования давления (напора) и подачи компрессора при изменении характеристик сети показан на рис. 2.5.1. Если необходимо обеспечить регулирование напора и его стабилизацию в соответствии с заданным значением HЗ при произвольном изменении характеристик сети от 1 до 3 (см. рис. 2.5.1, а), то выполняют измерение давления в магистрали и с помощью регулятора давления автоматически меняют частоту вращения компрессора (от ω1 до ω2) так, чтобы давление оставалось постоянным. При этом характеристики компрессора изменяются от 1! до 3'. Расход компрессора меняется от QA до QС. Точки А, В, С, на характеристиках компрессора 1!, 2', 3' являются рабочими точками при разных сопротивлениях магистрали, соответствующих характеристикам сети 1, 2, 3. При изменении заданного значения Н3 будут соответственно меняться характеристики и параметры компрессора.
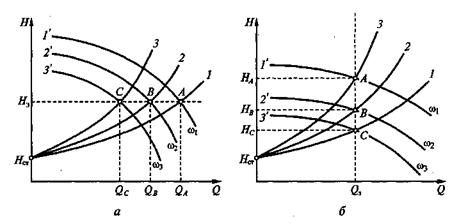
Рис. 2.5.1
Компрессорные агрегаты обычно объединяются в компрессорные станции, при этом несколько компрессоров работает параллельно на одну сеть.
Регулирование подачи компрессорной станции изменением частоты вращения компрессоров, имеющих различные характеристики, иллюстрируется рис. 2.5.2.
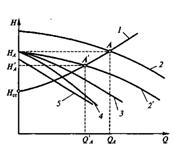
Рис. 2.5.2
Если два компрессора с суммарной характеристикой 2 работают на сеть с характеристикой 1 в точке А с производительностью QA и необходимо уменьшить их производительность до QA', то это можно сделать двумя способами: уменьшить частоту вращения обоих компрессоров (их характеристики 3 и 4 и суммарная характеристика 2') или снизить, но более значительно, частоту вращения одного из компрессоров (характеристика 5 при сниженной частоте вращения). Регулирование производительности изменением частоты вращения одновременно двух компрессоров по своим показателям равноценно регулированию частоты вращения компрессора при его одиночной работе.
С точки зрения экономичности регулирования более выгодным является одновременное изменение частоты вращения всех параллельно работающих компрессоров. Однако это связано с увеличением капитальных затрат на оснащение всех агрегатов регулируемым электроприводом. Поэтому для компрессорных станций достаточно иметь только один регулируемый агрегат и осуществлять более глубокое регулирование отключением отдельных компрессоров.
Ряд применяемых компрессоров, не требует регулирования скорости: подавляющее большинство заводских компрессорных установок и др. Поэтому для них используют асинхронные или синхронные (обычно при мощностях свыше 300 кВт) двигатели переменного тока, управление которыми осуществляется магнитными или бесконтактными пускателями (при малых мощностях), стандартными или специальными пусковыми станциями. Для асинхронных и синхронных двигателей такие станции предусматривают прямой, реакторный и автотрансформаторный способы пуска.
2. Совместная работа нагнетателей
В состав технологических схем подачи, как правило, несколько нагнетателей. Совместная работа нагнетателей в большинстве случаев вызвана следующими причинами:
־ один нагнетатель не может обеспечить требуемую подачу или давление, а замена его другим, более мощным, невозможна;
־ в процессе эксплуатации в соответствии с требованиями технологического процесса возникают режимы, связанные с продолжительным изменением расхода и сопротивления сети (изменение режима осуществляется отключением одного из нагнетателей);
־ требуется обеспечить надежность работы всей системы в целом;
־ архитектурно-планировочные решения зданий приводят к созданию сложных разветвленных сетей, для регулирования которых с наибольшей эффективностью требуется установка нескольких нагнетателей.
Включение нагнетателей в совместную работу может быть параллельным, последовательным и смешанным (комбинированным).
3. Параллельное включение нагнетателей
Параллельное включение двух и большего числа нагнетателей рекомендуется тогда, когда требуется увеличение подачи, а соответствующее увеличение частоты вращения рабочего колеса или размеров нагнетателя невозможно из-за чрезмерного усиления шума, конструктивных или архитектурно-планировочных причин.
Известны три основные схемы параллельного включения нагнетателей: полностью параллельное включение (рис. 2.5.3, а) и полупараллельное включение по схемам, показанным на рис. 2.5.2, б и в.
На рис. 2.5.3 в сеть включены нагнетатели с одинаковыми характеристиками. Для упрощения анализа пренебрежем сопротивлением индивидуальных участков сети (участки 1 - 2). В этом случае, как и в случае любого совместного включения, главным является определение режима работы не только всей системы в целом, но и каждого из нагнетателей. Функциональная зависимость давления нагнетателя от его подачи сложна и чаще всего задается графически в виде характеристики P=f(L), поэтому наиболее простой способ анализа – графический. Обычно применяют метод суммарной характеристики нагнетателей.
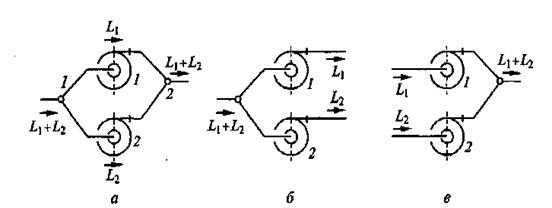
Рис. 2.5.3
Давления, создаваемые каждым нагнетателем в точках 1 и 2, одинаковы, а общая подача равна сумме подач отдельных нагнетателей. Отсюда следует правило построения суммарной характеристики параллельно включенных нагнетателей: при одинаковом давлении нужно сложить подачи.
Построение суммарной характеристики давления показано на рис. 2.5.4. Абсциссы а, представляющие собой подачу одного нагнетателя, суммируются при каждом значении давления. При включении нагнетателей в сеть с характеристикой (1 + 1) режим работы определяется точкой А. При этом суммарная подача нагнетателей определяется величиной LA(1+1) а суммарное давление - величиной Р1(1+1), при этом Р1(1+1) = РА(1+1), т.е. давление, создаваемое каждым нагнетателем при совместной работе, равно суммарному давлению. Подача каждого нагнетателя составляет половину общей и может быть определена графически по положению точки А", т. е. L1(1+1) = 0.5LА(1+1) = LA. КПД обоих нагнетателей равен КПД каждого из них и определяется пересечением ординаты, проходящей через точку А", с характеристикой КПД нагнетателя. Пересечение этой ординаты с характеристикой мощности определяет затраты мощности каждым нагнетателем. Суммарные затраты мощности равны сумме мощностей отдельных нагнетателей: NA(l +1) = 2N1(1+1).
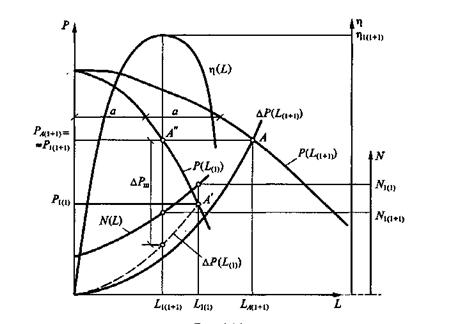
Рис. 2.5.4
При отключении одного из нагнетателей характеристика сети DP(L(1)) становится круче вследствие уменьшения площади поперечного сечения для прохода воздуха между точками 1 и 2. Рабочая точка переходит из положения А в положение А! (см. рис. 4.14). При этом параметрами работы нагнетателя становятся L1(1) > L1(1+1), P1(1) < P1(1+1) и N1(1) > N1(1+1). Это приводит к перегреванию обмоток электродвигателя. Поэтому при выключении одного из нагнетателей его индивидуальный участок необходимо перекрыть клапаном (чтобы исключить бесполезное перетекание газа по нему из-за разности давлений Р2 - Р1), а в сеть оставшегося в работе нагнетателя ввести дополнительное давление DРШ так, чтобы рабочая точка переместилась в положение А". При этом затраты мощности составляют N1(1+1), и перегревания электродвигателя не происходит.
Построение суммарной характеристики нагнетателей с разными характеристиками в принципе не отличается от предыдущего построения.
При параллельной работе нагнетателей с разными характеристиками представляется целесообразным определять средний КПД нагнетателей:
 (2.5.1)
(2.5.1)
Из формулы (2.5.1) следует, что более мощные нагнетатели должны работать с максимальным КПД, а регулировать расход в системе целесообразнее менее мощным нагнетателем.
Рассмотренный выше метод построения суммарной характеристики нагнетателей можно применять при любом числе нагнетателей.
4. Последовательное включение нагнетателей
Последовательное включение двух или большего числа нагнетателей применяется тогда, когда давление, создаваемое одним нагнетателем, недостаточно для преодоления сопротивления сети.
При последовательном включении одно и то же количество газа последовательно перемещается всеми нагнетателями, а давление, необходимое для преодоления сопротивления всей сети, равно сумме давлений, создаваемых каждым нагнетателем. Так как кинетическая энергия, сообщенная потоку первым нагнетателем, не теряется на удар, то общее статическое давление больше суммы статических давлений отдельных нагнетателей. Например, три одинаковых последовательно включенных нагнетателя создают полное давление 3P1(1+1+1).
Если нагнетатель включить последовательно с более мощным, то его подача может увеличиться до значений, гораздо больших, чем его собственная максимальная подача. При этом он станет сопротивлением для более мощного нагнетателя, т. е. при сохранении направления подачи (L > 0) разность давлений с обеих сторон нагнетателя изменит знак.
Работа нагнетателя возможна при L >0 и Р > 0 (1 квадрант), при L < 0 и Р > 0 (II квадрант), при L > 0 и Р < 0 (IV квадрант). Работа нагнетателя в III квадранте невозможна, так как поток не может пойти в обратном направлении через нагнетатель (L < 0) при давлении перед нагнетателем большим, чем за ним. Обычно характеристику снимают только в I квадранте, т. е. при нормальной работе нагнетателя, тем более что для снятия характеристики во II и IV квадрантах требуется специальное оборудование.
5. Система управления компрессором с преобразователем частоты
Наиболее современным является регулирование с помощью преобразователей частоты, которые позволяют плавно регулировать частоту вращения электродвигателя компрессора и поддерживать давление в системе при разных расходах перекачиваемого газа. При малых расходах газа двигатель компрессора вращается с малой скоростью, необходимой только для поддержания номинального давления, и не расходует лишней энергии. При увеличении расхода газа преобразователь увеличивает частоту вращения электродвигателя, повышая производительность компрессора при сохранении заданного давления.
На рис. 2.5.5 показана функциональная схема регулирования электродвигателя компрессора с использованием преобразователя частоты Micromaster440 фирмы «Siemens». На вход системы подаются сигналы задания давления и сигнал реального давления, получаемый с датчика давления, установленного в цепи обратной связи. Отклонение между реальным и заданным значениями давления преобразуется ПИД-регулятором в сигнал задания частоты для преобразователя. Под воздействием сигнала задания преобразователь изменяет частоту вращения электродвигателя компрессора и стремится привести разность между заданным и реальным значениями к нулю.
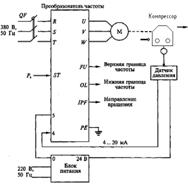
Рис. 2.5.5
Данная схема является модульной и применима для создания проекта, в котором будет реализован алгоритм управления.
Современные преобразователи частоты позволяют создавать системы управления (СУ) без дополнительных аппаратных средств, так как имеют встроенные программные функции, позволяющие реализовывать узел сравнения и ПИД-регулятор. Однако в сложных системах регулирование давление в системе с использованием простых средств регистрации не дает желаемого эффекта. Поэтому, данный способ регулирования совмещают с микропроцессорной системой управления.
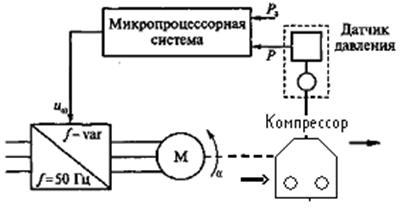
Рис. 2.5.6
Система управления (рис. 2.5.6) включает в себя микропроцессорную систему и преобразователь частоты, позволяющий регулировать подачу компрессора изменением его частоты вращения. Функции принадлежности входных и выходных сигналов, правила принятия решений формируются на основе программы, разработанной и внедренной в контроллер данной системы, следящей за ходом технологического процесса.
Значение давления Р определяется датчиком давления, сигнал с которого после двенадцатиразрядного аналого-цифрового преобразования поступает в микропроцессорную систему управления в виде целого числа (от 0 до 4000).
Для более качественного управления процессом в системе используется динамико математическое моделирование, в котором часто фигурирую сложные формы анализа состояния среды. Система также оперирует косвенными переменными, участвующими в вычислении, в частности такие как: скорость изменения давления vР, которая учитывает динамику протекания процесса, и задает особенности внутреннего лексикона задания переменных регулирования.
Для регулирования с помощью преобразователя частоты скорости электропривода компрессора используется сигнал задания скорости nω, который поступает с выхода цифроаналогового преобразователя микропроцессорной системы управления. Формированием управляющего сигнала обеспечивается изменение частоты вращения ω, которое определяется целым числом. В лингвистических переменных управление изменением частоты вращения может быть представлено несколькими уровнями, в зависимости от степени регулирования и сложности динамики.
На основе принципов работы и регулирования составляются основные правила функционирования. Если анализировать все возможные состояния условий, то для этого составляется сводная таблица условий, в которой столбцы соответствуют условиям одного параметра, строки - условиям другого параметра, а на их пересечениях записываются выводы, соответствующие этим условиям.
Делая вывод, можно сказать что, применение частотно-регулируемого привода дополнительно обеспечивает следующее:
Снижается износ коммутационной аппаратуры из-за отсутствия больших пусковых токов при включении двигателя компрессора.
Оптимизация давления в пневмосети снижает утечки сжатого воздуха.
Увеличивается срок службы электродвигателя из-за снижения его нагрузки и отсутствия тяжёлых пусковых режимов.
3. СОЗДАНИЕ ЛОГИЧЕСКОЙ МОДЕЛИ СИСТЕМЫ УПРАВЛЕНИЯ КУ
3.1 Анализ и разработка структурной схемы конструктивных и технологических элементов механизма движения поршневого компрессора
Поршневой компрессор относится к классу сложных систем. Общая численность конструктивных элементов (КЭ) и технологических элементов (ТЭ) может составлять 104-106 единиц.
Одним из решений проектирования сложных конструктивных схем является внедрение современных информационных технологий и методик в общем и CALS-методологии в частности. Концепция и стандарты CALS определяют набор правил и регламентов, в соответствии с которыми строится взаимодействие субъектов.
Использование новых информационных технологий неизбежно влечет за собой пересмотр существующих принципов и методов проектирования. Сегодня уже не достаточно получения геометрической или математической модели проектируемого изделия и набора чертежей. В процессе моделирования необходимо получать динамические пространственные модели, отражающие полную структуру изделия, его взаимодействие с оборудованием. Создание полной электронной модели изделия - основная задача CALS-технологии.
Согласно принципам разработка любой сложной системы должна начинаться со структурно-функционального анализа и моделирования ее в целом и всех ее подсистем в частности. Для этого применяется семейство методологий моделирования IDEF, позволяющее исследовать структуру, параметры и характеристики объектов моделирования. В настоящее время стек методологий IDEF включает ряд частных методологий для моделирования систем, в том числе:
IDEF0 - методология моделирования, используемая для создания функциональной модели, с помощью наглядного графического языка IDEF0, отображающая структуру, процессы и функции системы в виде набора взаимосвязанных функций (функциональных блоков), а также потоки информации и материальных объектов, преобразуемые этими функциями. Моделирование средствами IDEF0 является первым этапом изучения любой системы;
IDEF1 - применяется для построения информационной модели, отображающей структуру и содержание информационных потоков внутри системы, необходимых для поддержки функций системы. Позволяет отображать и анализировать их структуру и взаимосвязь;
IDEF1X (IDEF1 Extended) - методология построения реляционных структур. IDEF1X относится к типу методологий «Сущность-взаимосвязь» и используется для моделирования реляционных баз данных, имеющих отношение к рассматриваемой системе;
IDEF2 - методология динамического моделирования развития систем, позволяющая создавать динамическую модель меняющихся во времени поведения функций, информации и ресурсов системы;
IDEF3 - методология моделирования процессов, происходящих в системе, предназначенная для создания сценариев и описания последовательности операций для каждого процесса;
IDEF4 - методология объектно-ориентированного проектирования и анализа систем. Средства IDEF4 позволяют наглядно отображать структуру объектов и принципы их взаимодействия, позволяя анализировать и оптимизировать сложные объектно-ориентированные системы;
IDEF5 - методология определения онтологий (словарей) исследования сложных систем. С помощью словаря терминов и правил позволяет описать онтологию системы. В итоге могут быть сформированы достоверные утверждения о состоянии системы в некоторый момент времени, на основе которых делаются выводы о дальнейшем развитии системы и производится её оптимизация.
IDEF9 - методологии моделирования требований.
Основное требование системного подхода при изучении какого-либо объекта – рассмотрение системы как единого целого, т.е. определенной одним функциональным блоком (черным ящиком) со своими входами и выходами. Контекст модели очерчивает границы моделируемого процесса и описывает его взаимосвязи с внешней средой и другими процессами, определяя модель процесса как часть целого. В контекст IDEFO-модели входит определение единственного субъекта моделирования, его полное, точное и адекватное описание, называемое целью модели, созданное с одной точки зрения на модель. Согласно IDEF0 контекст системы представляется контекстной диаграммой, а диаграммы нижнего уровня описывают детализированные аспекты системы.
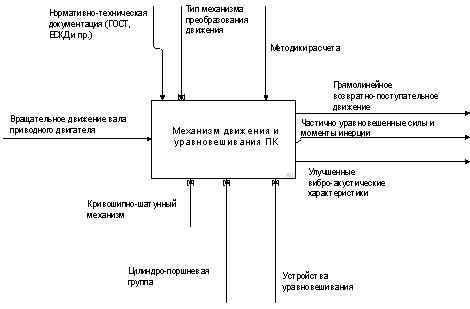
Рис. 3.1- Контекстная диаграмма механизма движения и уравновешивания ПК
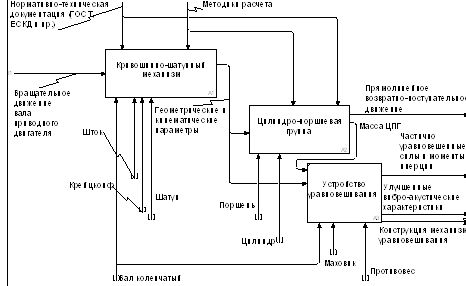
Рис. 3.2 - Структурно-функциональная диаграмма механизма движения и уравновешивания ПК
Контекстная диаграмма механизма движения и уравновешивания ПК приведена на рис. 3.1. На рис. 3.2 представлена структурно-функциональная диаграмма механизма движения и уравновешивания ПК.
В основу методологии IDEF0 положен процесс декомпозиции, основанный на объектно-ориентированном подходе к рассмотрению объекта проектирования как системы взаимосвязанных элементов. Полученная при анализе информация представляется в виде иерархической структуры в графическом виде – диаграммы дерева узлов.
Согласно принципам объектно-ориентированного подхода к процессу проектирования требуется глубокая декомпозиция структуры изделия до уровня КЭ и ТЭ, их идентификации на основе единой системы условных обозначений. Поэтому предлагается к рассмотрению структурная схема механизма движения и уравновешивания поршневого компрессора как системы (СУПК), в которой выделены основные функциональные, конструкторские и технологические элементы, входящие в его состав.
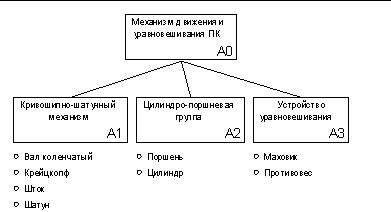
Рис. 3.3 - Верхние уровни (0-й – 2-й) диаграммы узлов
На наивысшем нулевом уровне (рис. 3.3) расположен сам СУПК, принятый к рассмотрению как метасистема. В метасистеме выделены три подсистемы первого уровня – это кривошипно-шатунный механизм, цилиндропоршневая группа и механизм уравновешивания. В процессе дальнейшей декомпозиции к рассмотрению принимаются подсистемы первого уровня и т.д., каждая из которых рассматривается как система более низкого уровня (рис. 3.4).
Декомпозиция каждой из подсистем всех уровней позволила создать диаграмму, представляющую собой структурную схему объекта моделирования, в которой указаны основные КЭ и ТЭ, а также их характеристики. Разработанная схема учитывает характерные особенности конструкции и достаточно полно описывает моделируемую систему до уровня КЭ и ТЭ.
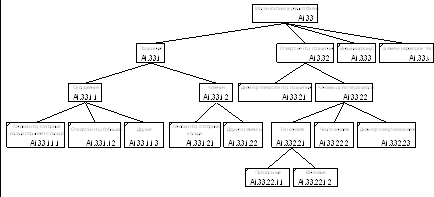
Рис 3.4 - Подсистема четвертого уровня
На основании проведенного анализа полученной диаграммы были получены следующие результаты:
־ создан перечень основных технико-экономических характеристик, которые отражают разнообразие возможных вариантов исполнения данного объекта;
־ определены и разработаны базы данных стандартизованных и унифицированных деталей, необходимые для проектирования СУПК;
־ составлен перечень данных, используемых как исходные, при выполнении проектировочных и поверочных расчетов;
־ определен перечень требуемых математических моделей КЭ и ТЭ для разработки САПР СУПК.
3.2 Рассмотрение виброакустических характеристик полученной модели
В машинах такого типа вследствие возвратно-поступательного движения поршня, возникает нестационарность динамических воздействий, что характеризуется более сложным, в отличие от роторных машин, характером вибрационного состояния. Это приводит к возникновению дополнительных источников вибрации:
неуравновешенные силы инерции вращающихся Fr и поступательно движущихся масс FS;
момент сил инерции Ми вращающихся и поступательно движущихся масс;
опрокидывающий момент Мопр;
крутильные колебания коленчатого вала;
пульсация давления газа в цилиндрах и межступенчатых коммуникациях;
удары элементов механизма движения, цилиндро-поршневой группы (ЦПГ) и клапанов.
Одной из характерных особенностей диагностирования поршневых машин является то, что колебания, проявляющиеся вследствие неисправностей, накладываются на общее вибрационное состояние от неуравновешенности масс. Это приводит к необходимости рассмотрения двух подходов:
1. анализ колебаний компрессора как единого целого, возникающих от его неуравновешенности;
2. анализ вибрации узлов компрессора, возникающей от дефектов.
Другой особенностью поршневых машин является функционирование узлов механизма движения в условиях циклически изменяющихся нагрузок. Это приводит к появлению в них ударов. Расчет скорости соударения и времени появления ударных импульсов для каждого сопряжения позволяет выделить их в виброакустическом сигнале. В результате динамического анализа механизма движения поршневого компрессора с учетом зазоров в подвижных соединениях получили:
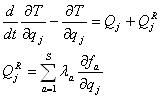 (3.1)
(3.1)
где ![]() а-
множитель, характеризующий реакцию связи а; Т - кинетическая энергия
механической системы (механизма движения компрессора),
а-
множитель, характеризующий реакцию связи а; Т - кинетическая энергия
механической системы (механизма движения компрессора), ![]() и Qj - соответственно обобщенная
реактивная и активная силы; fa - уравнение связи а контактного
движения деталей; R - число обобщенных координат.
и Qj - соответственно обобщенная
реактивная и активная силы; fa - уравнение связи а контактного
движения деталей; R - число обобщенных координат.
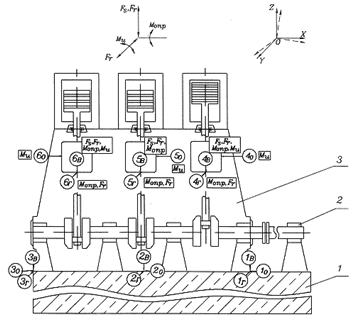
Рис. 3.5 - Схема компрессора с контрольными точками измерения вибрации: 1-6 - контрольные точки; 1 - фундамент; 2 - электродвигатель; 3 - станина компрессора.
При этом в качестве обобщенных координат qj рассматривалось относительное
движение деталей сопряжений в поле зазора и угол поворота колен вала. Зазоры
учитывались в узлах "поршень-цилиндр", "башмак
крейцкопфа-направляющая", а также в крейцкопфном и шатунном подшипниках
скольжения. Введение в уравнения движения реактивной составляющей![]() позволило описать весь цикл виброударного режима
работы механизма с помощью одних и тех же зависимостей.
позволило описать весь цикл виброударного режима
работы механизма с помощью одних и тех же зависимостей.
Для выделения информативных диагностических признаков в амплитудном спектре, по результатам моделирования, был определен основной характер взаимодействия функциональных узлов:
 (3.2)
(3.2)
3.3 Моделирование алгоритма управления в программном пакете математического моделирования MATHLAB
Для выполнения расчетного анализа разработаны математические модели различных схем циклов сжижения: одноступенчатые и двухступенчатые схемы циклов. Модели реализованы в диапазоне давлений и температур газа на входе в УСПГ соответственно 3,5..5,5 МПа и 233..288К.
Моделирование динамики механизма движения компрессора с учетом зазоров позволяет определить силовые параметры в узлах, необходимые для проведения расчета на статическую и усталостную прочность. В настоящее время эти расчеты проводятся в соответствии с методиками, выше, где нормальные и касательные составляющие реакций определяются методом кинетостатики. Однако как показали теоретические исследования, это справедливо лишь в первом приближении. Максимальные значения сил в моменты ударов могут превышать соответствующие значения реакций в механизме без учета зазоров более, чем в 2 раза. Кроме этого, как показано на рис.3.5, в условиях контактного движения деталей, наблюдаются модулированные высокочастотные колебания циклическим характером нагружения узла. При этом величина реакции периодически изменяется от максимального до минимального значения. Частота этих колебаний определяется скоростью вращения колен вала, значениями зазоров во всех сопряжениях механизма, их режимом трения и тому подобное. Установлено, что ВЧ колебания появляются вследствие того, что движение деталей относительно друг друга происходит не плавно, а "рывками" - из-за влияния зазоров в подшипниках.
Для реализации максимально оптимальных характеристик компрессорной установки, на период адаптации, можно пренебречь вибрациями высокого порядка, а малые сравнительно совпадают по частоте с режимом номинальной работы двигателя в установившемся режиме. Однако характеристику установочных звеньев связует число, приведенное к общему уровню взаимодействия, относительно опоры. Поэтому, общую формулу связи входных узлов компрессора и выходных параметров прохождения в трубопровод зададим следующим образом:
![]() ; (3.3)
; (3.3)
При учете наличия в системе мер стабилизации, которые реализуется в виде контура регулирования как скорости, так и тока якоря двигателя, можно пренебречь динамическими коэффициентами сопротивления газа в трубопроводе и толчкообразные сигналы на выходе.
3.4 Синтез системы управления привода компрессорной установки
Составим структурные схемы исходной системы. Определим передаточные функции звеньев.
Таблица 3.1
Определение передаточной функции звеньев
| Название звена | Передаточная функция | |
| Формула | Расчёт | |
| Компрессор |
WК(р)= |
WК(р)= |
| Звено цепи якоря |
W(р)= |
WЦЯ(р)= |
| Механическая часть двигателя |
W(р)= |
WМЧ(S)= |
| Преобразователь |
W(р)= |
WП(S)= |
WИСХ = WП*WЦЯ*WМЧ*WК =
![]()
![]()
![]()
= ![]() (3.4)
(3.4)
Проверим исходную систему на устойчивость, т. е. получим график переходного процесса (рис.3.6):
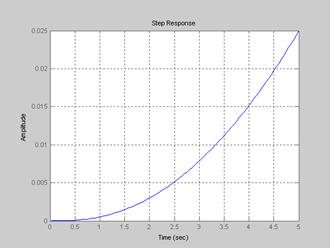
Рис.3.6
Из рисунка видно, что переходный процесс является расходящимся, следовательно исходная система неустойчива и требует регулирования.
Первый контур регулирования
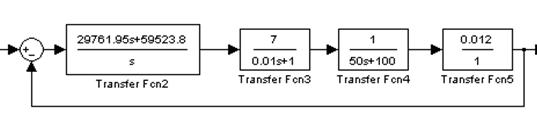
Рис.3.7
КТ = 0.1/8 = 0.012 , (3.5)
Найдем исходную ПФ 1 контура
WИСХ1(p)=WП*WЦЯ*КТ, (3.6)
WИСХ1(р) = ![]()
![]() 0.012 =
0.012 = ![]() , (3.7)
, (3.7)
Будем настраивать внутренний контур на технический оптимум.
При настройке на технический оптимум желаемая передаточная функция имеет вид
Wж1(р)= (3.8)
(3.8)
С другой стороны WЖ1 (р)= Wрег1(р)* Wисх1(р), следовательно
Wрег1(р)= (3.9)
(3.9)
Wрег1(р)=![]() , (3.10)
, (3.10)
Выполним проверку. Найдем
желаемую ПФ замкнутой системы (3.11)
(3.11)
Найдем ПФ замкнутого первого контура
Ф1(S)= =
= ![]() , (3.12)
, (3.12)
Для дальнейших расчетов примем
Ф1(S) ≈![]() ,
(3.13)
,
(3.13)
Расчеты выполнены верно: Ф1(S) = ФЖ1 (S).
Второй контур регулирования
Введем второй контур регулирования

Рис.3.8
К =27.8/8 = 3.5 (3.14)
 (3.15)
(3.15)
Желаемая передаточная функция 2 контура имеет вид
Wж2(р)= (3.16)
(3.16)
Wж2(S)=![]() (3.17)
(3.17)
Wрег2(р)![]() (3.18)
(3.18)
Найдем желаемую ПФ замкнутой системы
 (3.19)
(3.19)
Найдем ПФ замкнутого первого контура
Ф2(р)= 
![]() , (3.20)
, (3.20)
Ф2(S) ≈![]() (3.21)
(3.21)
Третий контур регулирования
Введем третий контур регулирования:

Рис.3.9
КД = 8/60 = 0.14 (3.22)
 (3.23)
(3.23)
Желаемая передаточная функция 3 контура имеет вид
Wж2(р)= , (3.24)
, (3.24)
Wж2(S)=![]() (3.25)
(3.25)
WРЕГ3(р)![]() (3.26)
(3.26)
Найдем желаемую ПФ замкнутой системы
 (3.27)
(3.27)
Найдем ПФ замкнутого первого контура
Ф2(р)= ![]() , (3.28)
, (3.28)
Найдем ПФ замкнутой и разомкнутой системы
Wраз=Ф3*![]()
 , (3.29)
, (3.29)
![]() , (3.30)
, (3.30)
Проверим систему на устойчивость, т. е. получим график переходного процесса (рис.3.10):
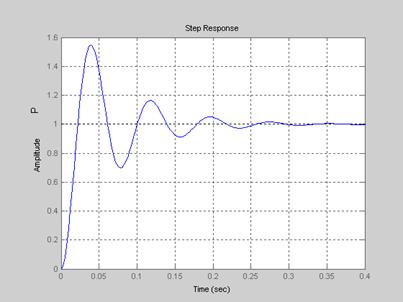
Рис.3.10
Из рисунка видно, что время переходного процесса равно 0.3 сек, следовательно рассчитанный регулятор подходит для данной системы и система является устойчивой.
3.5 Реализация корректирующих устройств на регуляторах
В связи с тем, что контроллер, используемый в системе управления ТП, работает дискретно, то и регуляторы должны быть представлены в дискретном виде (аппроксимация Тустена или Z - преобразования).
Существуют различные методы синтеза цифровых регуляторов, основанные на теории Z - преобразования и пространства состояний. Эти методы требуют очень громоздких математических преобразований и используются в особо точных системах управления.
Рассмотрим более простой подход, состоящий в предварительном синтезе непрерывных регуляторов известными методами теории автоматического регулирования для непрерывных систем и последующем переходе к цифровому регулятору, эквивалентному синтезированному аналоговому.
Задача переоборудования аналоговых регуляторов решается как задача аппроксимации передаточной функции данного регулятора дискретной передаточной функцией цифрового регулятора.
В инженерной практике наибольшее применение нашла аппроксимация, полученная на основе билинейного преобразования или аппроксимация Тустена.
Согласно этой аппроксимации:
 ;
; ![]() , (3.31)
, (3.31)
где Т - интервал дискретизации по времени
Однако, этим методом можно пользоваться только тогда, когда интервал дискретизации по времени для цифровой системы Т мал по сравнению с самой малой постоянной времени системы управления Тm. Согласно теореме Котельникова - Шеннона непрерывный сигнал достаточно точно восстанавливается по совокупности его дискретных значений, если
Т £ 0,5 Тm.. (3.32)
На практике необходимо иметь больший коэффициент запаса
Т £ ( 0,1 - 0,2 ) Тm. (3.33)
Определим период дискретизации (Т): это обратная величина от частоты контроллера, но лучше взять частоту АЦП, которая в нашем случае равна 48КГц=48000Гц. Выбор частоты АЦП связан с тем, что скорость обработки информации в первую очередь зависит от скорости работы АЦП.
![]() , (3.34)
, (3.34)
Проверим соблюдение условия (теорема Котельникова - Шеннона)
Т £ 0,5 Тm.. (3.35)
0.00001 £ 0,5*0.02, (3.36)
0.00001 £ 0.01, (3.37)
Условие соблюдается, следовательно период дискретизации выбран правильно.
Произведем перевод полученных регуляторов в дискретные.
Синтез цифровых регуляторов по средствам программы MatLab
Wрег1(р) =![]() , (3.38)
, (3.38)
Wрег1(z) =![]() , (3.39)
, (3.39)
Wрег1(р) =![]() , (3.40)
, (3.40)
Wрег1(z) =![]() , (3.41)
, (3.41)
Wрег3(р) ![]() , (3.42)
, (3.42)
Wрег3(z) ![]() , (3.43)
, (3.43)
4. Проектирование системы автоматиЧЕСКОГО управления с использованием пакета Rational Rose
Создание протокола записи
На диаграмме вариантов использования видно, что режим работы задается оператором вариантом использования Remote Control. После запуска оператором процесса контроллер, получая данные от датчиков, управляет устройствами. Контроллер выдает информацию о текущем состоянии процесса оператору в виде Out info, что показано на диаграмме вариантом использования. Архивирование работы системы также представлено в виде Out info.
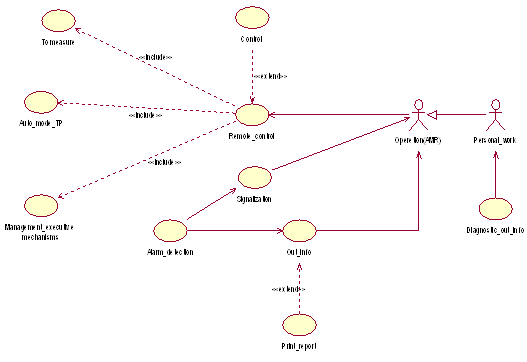
Рис. 4.1 - Диаграмма вариантов использования
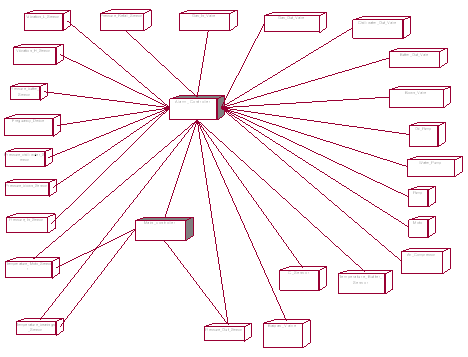
Рис. 4.2 - Диаграмма топологии
4.1 Построение структуры системы
Физическое представление системы управления не может быть полным, если отсутствует информация о том, на какой технологической платформе она реализована. Поэтому после того, как основные функции системы определены, следует определиться с аппаратной частью проектируемой системы. На основании этого построим диаграмму топологии (рис. 4.2). Диаграмма топологии является единой для системы в целом, поскольку должна всецело отражать особенности ее реализации.
Центральным устройством системы управления, функционально связанным со всеми устройствами системы и управляющий ими, является контроллер, что соответствует определенным выше требованиям к системе.
Далее определяем, каким образом устройства, показанные на диаграмме топологии, взаимодействуют между собой. Для этого сначала разделим устройства в зависимости от выполняемых ими функций на следующие категории (классы):
־ Контроллер (класс Controller) – посылает запросы датчикам и управляющих сигналов исполняющим устройствам.
־ Клапаны (класс Valve) - открытие и закрытие.
־ Датчик давления (класс P_Sensor) – измерение давления.
־ Устройство регулирования частоты (класс Frequency_Device) – задание токовых сигналов.
־ Датчик температуры (класс T_Sensor) - измерение температуры.
־ Датчик смещения (класс C_Sensor) – измерение смещения вала ротора.
־ Датчик вибрации (класс V_Sensor) – измерение вибраций.
־ Двигатель (класс Moto) – общий класс объекта ЭД;
־ Воздушный компрессор (класс Air_Compressor) – общий класс объекта компрессор;
־ Насос (класс Pump) – общий класс объекта насос;
־ Ресивер (класс Receiver) – общий класс спускного механизма.
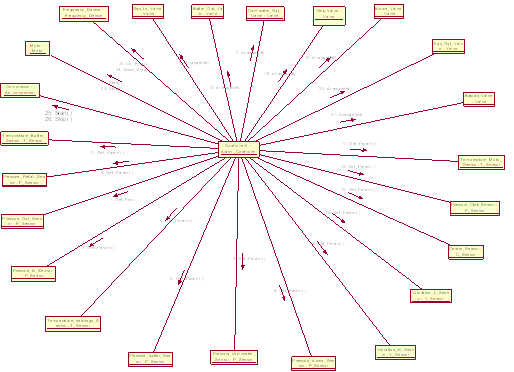
Рис. 4.3 - Диаграмма взаимодействия объектов системы.
После декомпозиции системы (разбиения на классы), представим ее как совокупность взаимодействующих объектов соответствующих классов (рис. 4.3).
На данной диаграмме приняты следующие обозначения:
Frequency_Device – частотный регулятор привода компрессора;
Moto – приводной электродвигатель компрессора;
Compressor – воздушный компрессор подачи охлаждения;
Oil_Pump – маслонасос системы охлаждения;
Water_Pump – водяной насос подачи охлаждения;
Temperature_Buter_Sensor – датчик температуры масла;
Temperature_bearings_Sensor – датчик температуры подшипников;
Temperature_Moto_Sensor - датчик температуры двигателя;
Pressure_In_Sensor - датчик давления газа на входе компрессора;
Pressure_Out_Sensor – датчик давления газа на выходе компрессора;
Pressure_Refall_Sensor - датчик перепада давления;
Pressure_butter_Sensor - датчик давления масла;
Pressure_chill-water_Sensor - датчик давления охлаждающей воды;
Pressure_blown_Sensor - датчик давления обдува воздуха;
Pressure_Stek_Sensor – датчик давления воздуха в стойку;
Vibration_H_Sensor – датчик вибрации горизонтальный;
Vibration_L_Sensor – датчик вибрации вертикальный;
Center_Sensor – датчик осевого сдвига;
Gas_In_Valve – клан подачи газа на вход компрессора;
Gas_Out_Valve – клан выкида газа с компрессора;
Butter_Out_Vale – клапан слива масла;
Chill-Water_Out_Valve – клапан слива охлаждающей воды;
Stek_Valve – клапан подачи воздуха в стойку;
Blow_Valve – клапан подачи воздуха на обдув ЭД;
Baipas_Valve – байпасный клапан.
На диаграмме видно, что всем объектам класса Valve контроллером посылаются управляющие сигналы на закрытие (Close) и открытие (Open) соответствующего клапана. Датчикам T_Sensor, P_Sensor, V_ Sensor, C_ Sensor контроллер посылает запросы на выдачу соответственно сигнала (Get_Param). Объектам класса Pump, Compressor контроллер посылает управляющие сигналы на включение (Start) и отключение (Stop).
Функциональный блок, задающий временные последовательности опроса датчиков, является генератор, при получении от него сигнала контроллер производит опрос датчиков.
После того, как были определена принадлежность объектов тем или иным классам, детализируем каждый класс с целью определения свойств объектов системы.
Класс Valve
Так как клапаны должны выполнять процентную функции открытия и закрытия, класс содержит атрибутов – State, и два метода: Open() и Close().
Класс Sensor
Объединил в себе все измерительные устройства, которые при необходимости запрашивают атрибут Param и метод Get_Param.
Класс Moto
Данное устройство должны выполнять функции включения и выключения, класс содержит атрибутов – State, и два метода: (Start) и (Stop).
Класс Frequency_Device
Устройство производит регулирование частоты вращения двигателя, класс содержит атрибутов m_Freq и два метода: (Up_Freq) и (Down_Freq).
Класс Air_Compressor
Данное устройство должны выполнять функции включения и выключения, класс содержит атрибутов – State, и два метода: (Start) и (Stop).
Класс Pump
Объединил в себе все насосы, которые содержат два метода: (Start) и (Stop) и атрибут – State.
Класс Receiver
Объединил в себя регулирующие органы класса Valve спуска газа.
Класс Controller.
Должен содержать в себе все введенные оператором параметры технологического процесса:
m_P_Gas_In_min – минимальное входное давление;
m_P_Gas_In_max – максимальное входное давление;
m_P_Gas_Out_min – минимальное выходное давление;
m_P_Gas_Out_max – максимальное выходное давление;
m_P_Gas_Defference_max – максимальный перепад давления;
m_T_Gas_Out_max –максимальная температура газа на выходе;
m_T_Gas_In_max – минимальная температура газа на входе;
m_Freq_max – максимальная частота вращения двигателя;
m_C_max – максимальное значение смещения вала;
m_Vibr_max – максимальное значение вибрации вала;
m_T_ bearing_max – максимальная температура подшипника;
m_T_moto_max – максимальная температура двигателя;
m_T_Oil_max – максимальная температура масла;
m_P_Oil_max – максимальное давление масла;
m_P_Oil_Reserv_max – максимальное давление масла с резерва;
m_T_time – время опроса датчиков температуры;
m_P_time – время опроса датчиков давления;
m_C_time – время опроса датчиков смещения;
m_Vibr_time – время опроса датчиков вибрации;
m_P_Water_max – максимальное давление воды;
m_P_Water_min – минимальное давление воды;
m_P_Air_max – максимальное давление воздуха на обдув;
m_P_Air_min – минимальное давление воздуха на обдув;
Все выше сказанное представлено на диаграмме классов рис. 4.4
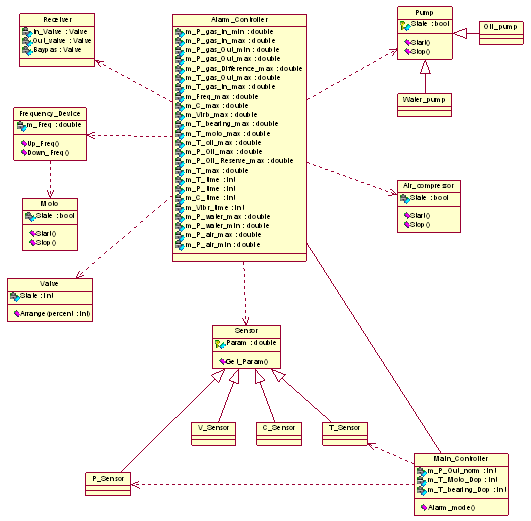
Рис. 4.4 - Диаграмма классов системы
4.2 Построение алгоритма работы системы
Запуск системы управления КУ производится по команде оператора после того, как им были введены параметры протекания процесса. Перед запуском предполагается, что все предпусковые параметры в норме. После запуска система начинает работать в автоматическом режиме, пока не будет остановлена оператором. При этом система должна автоматически обеспечивать предупреждение аварийных ситуаций. При необходимости изменить параметры оператор способен во время работы системы.
Система функционирует следующим образом.
Предполагается, что все внешние параметры протекания процесса сжатия находятся в норме, тогда происходит пуск двигателя.
Если система вовремя работы обнаруживает, что любой параметр предшествует нормальному ходу реакции – подается сигнализация и происходит блокировка соответствующего устройства.
Единственное условие блокировки, лежащего вне цикла работы является давление, температура и расход циркулирующего газа.
Во время работы происходит постоянная обработка входящих величин с датчиков, что говорит о том – система находится в активном состоянии. Дублирование данных и внешний отчет способствует анализу протекания процесса.
Алгоритм обработки данных имеет вид, представленный на рис. 4.5
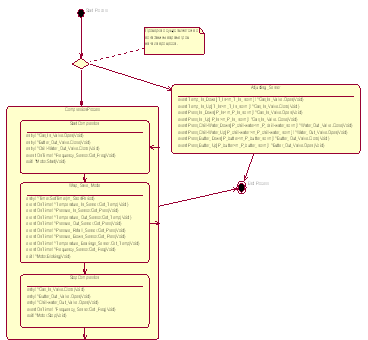
Рис. 4.5 - Диаграмма активности, иллюстрирующая обработку данных
4.3 Генерация программного кода
Класс в Rational Rose — это описание общей структуры (данных и связей) для дальнейшего создания объектов. Для того чтобы генератор Rational Rose имел возможность создавать на основе описанной модели программный код, для каждого класса необходимо указать язык, для которого будет создаваться код. Также необходимо определить компонент, в котором этот класс будет храниться. Если в качестве языка для создания кода указан VC++, то пользователь получает доступ ко всей иерархии классов библиотеки MFC при помощи визуальных средств Model Assistant. Поэтому прежде чем приступить к генерации кода на Visual C++, следует создать диаграмму компонентов, отражающая организацию и взаимосвязи программных компонентов, представленных в исходном коде, двоичных или выполняемых файлах. Связи в данном типе диаграммы представляют зависимости одного компонента от другого и имеют специальное отображение через значок «зависимости».
В данном проекте будет построена упрощенная диаграмма компонентов, на которой каждый из компонентов будет представлять класс или его реализацию, хотя при разработке программного кода в большинстве случаев могут использоваться другие подходы.
Для каждого из классов создается два файла: заголовочный (с расширением .h), который содержит описание класса, и файл реализации (с расширением .cpp), где содержится программная реализация методов класса.
Поэтому каждый класс на диаграмме компонентов будет представлен двумя компонентами: Package Specification и Package Body. Первый компонент представляет собой определение пакета (заголовочный файл с расширением .h), второй – тело пакета (файл с расширением.cpp).
Компоненты на диаграмме (рис. 4.6) для простоты имеют те же названия, что и класс, который они представляют.
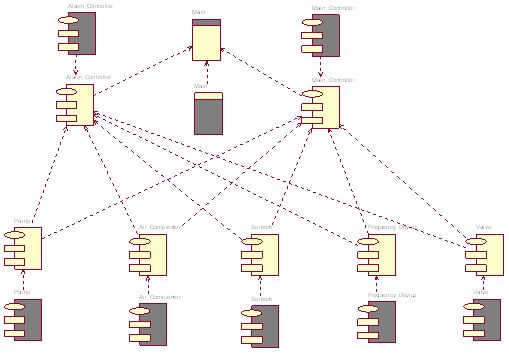
Рис. 4.6 - Диаграмма компонентов
Кроме того, при создании компонентов в спецификации каждого из них задается язык, на котором он будет реализован (в нашем случае – VC++), а также указывается какие классы включаются в компонент (вкладка Realizes спецификации компонента). На приведенной диаграмме в каждый компонент включен только один класс с тем же именем, что и компонент.
После того, как реализация и прототипы функций определены, с помощью инструмента Model Assistant в указанных классах задаем для каждого оператора тип возвращаемого им значения, передаваемых ему параметров и тело функции (Default Code Body). В классе Controller задается определение структуры params и содержащиеся в ней поля, представляющие задаваемые оператором параметры процесса.
Заключительным этапом в создании программного кода на Visual C++ является ассоциирование компонента с проектом Microsoft Visual Studio 6.0. Для этого используется инструмент Component Assignment Tool (меню Tools → Visual C++ → Component Assignment Tool…). Здесь в свойствах компонентов требуется либо указать существующий проект Visual Studio, либо создать новый проект (при этом используются средства Microsoft Visual Studio), в котором создаются классы, включенные в выбранные компоненты. С помощью этого инструмента можно также включать классы в компоненты и ассоциировать их с языком VC++ (если это еще не было сделано), методом Drag’n’Drop. После того как для всех компонентов был указан проект, в который они будут включены, можно приступать к генерации кода (меню Tools → Visual C++ → Update Code…). Если при этом был выделен класс или компонент, то произойдет обновление его кода (или создание, если он еще не был сгенерирован). Полный перечень программного кода, реализованного в данном проекте, представлен в Приложении В.
5. Аппаратная и программная реализация системы управления КУ
5.1 Аппаратная реализация управления
Реализация аппаратной части производится в соответствии с требованиями к системе управления, основные принципы которых излагаются в п.п. 2.3, 2.4 и особенностями технологического процесса, описание которых дается в п. 1.8. Фирмы, занимающиеся проектированием, установкой и наладкой САУ промышленных объектов в нефтехимической отрасли, особенно газоперекачивающей, имеют огромный опыт разработки систем подобного уровня. Поэтому, наиболее разумным было бы обратится к уже готовым решениям как построения самой системы управления, так и внедряемого оборудования. Многие фирмы при проектировании сложных объектов используют методологии, основной принцип которых описан в п. 3.1. Таким образом, можно считать, что данный метод позволит нам более рационально использовать предоставленные ресурсы.
Исходя из разумных принципов, полагаем, что все объекты обладают хорошей совместимостью, отвечают основным требования по качеству и исполнению, экономически обоснованы и имеют необходимые сертификаты соответствия ЕЭС. Архитектура САУ имеет возможность расширения и модернизации, с сохранением или улучшением предъявляемых требований. Наличие в системе контуров диагностики и самодиагностики оборудования, также приветствуется. Важным фактором также является наличие блоков защиты от помех разной природы, как электромагнитных, так и механических.
5.2 Выбор платформы системы управления
Система управления, удовлетворяющая данным требования, должна иметь либо открытый характер, способная интеграции стороннего программного обеспечения, либо поставляться как готовый набор средств программного и аппаратного управления. Остановимся на втором варианте, так как он подразумевает ряд важных особенностей:
־ Полный комплект технической и программной документации на устанавливаемые компоненты;
־ Нет необходимости на дополнительное приобретение программного обеспечения, так как структура и качество САУ подразумевает разработку средств управления четко выполняющие свои функции.
־ Наличие информационного центра технической поддержки;
־ Огромная база принципов реализуемых систем;
Одной из таких является полнофункциональная распределенная система управления технологическим процессом DeltaV. Полевые устройства foundation fieldbus, контроллеры и рабочие станции работают совместно в составе системы, обеспечивая управление каждый на своем уровне.
Данные системы нашли широкое применение на Российском рынке и имеют хорошую репутацию, ввиду того, что обладает достаточным количеством разновидностей устанавливаемых модулей, позволяющих создавать на их базе практически любые сложные системы управления.
Однако для правильного планирования системы DeltaV необходимо четкое формулирование требований к интерфейсу ПО управления процессом и установка этого ПО на должным образом сконфигурированную рабочую станцию.
Системы DeltaV эффективно используются для управления сетями различных размеров. Система DeltaV обладает возможностями гибкого планирования и моделирования размеров сети таким образом, чтобы система наиболее полно отвечала требованиям управления процессом. Минимальный набор компонентов для системы DeltaV представлен на рисунке 5.1, где показано число рабочих станций и контроллеров со всем необходимым оборудованием, которое должно быть включено в систему.
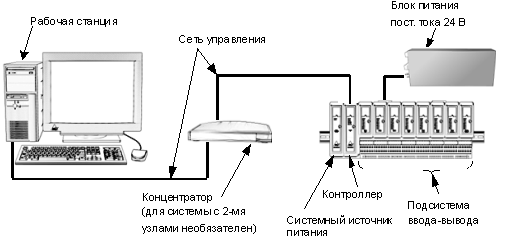
Рис. 5.1 - Минимальный комплект системы DeltaV
В этот комплект компонентов входит:
־ Сеть управления, поддерживающая обмен данными между рабочими станциями и контроллерами.
־ Рабочая станция, предоставляющая графический интерфейс пользователя.
־ Контроллер, выполняющий функции управления и обмена данными между подсистемой ввода-вывода и сетью управления.
־ Подсистема ввода-вывода, обрабатывающая информацию от полевых устройств.
־ Системный источник питания DeltaV
־ Групповой источник питания для полевых устройств, подключенных к системе DeltaV.
־ Несущие панели, монтируемые на рейки DIN, и обеспечивающие распределение питания и обмен данными между контроллером и платами ввода-вывода.
5.3 Выбор сети управления
Сеть управления – изолированная сеть Ethernet, обеспечивающая обмен данными между контроллером и рабочей станцией. Для подключения коммуникационных линий используются концентраторы и коммутаторы Ethernet.
При планировании топологии сети принимаются во внимание следующие соображения:
־ В сети управления может быть до 120 узлов.
־ Сеть управления системы DeltaV должна быть выделенной сетью для обеспечения надежности и высокой производительности. К сети управления DeltaV не должны быть подключены никакие другие устройства или сети.
־ Обмен данными с другими устройствами и сетями, не входящими в DeltaV, должен выполняться через Интеграционные станции.
По представленным топологиям сети управления выберем наиболее нам подходящую, т.е. симплексную сеть управления с резервированными контроллерами, схема которой представлена на рисунке 5.2
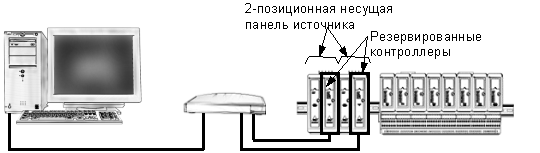
Рисунок 5.2 - Симплексная сеть управления и резервированные контроллеры
Несмотря на то, что резервированный контроллер использует два порта концентратора, он рассматривается как один узел.
При необходимости увеличение расстояния между узлами производится следующими способами:
־ преобразователи среды передачи данных;
־ каскадные концентраторы;
־ концентраторы со стековым соединением;
־ оптоволоконные дистанционные расширители.
Зная возможные способы модернизации нашей системы, рассмотрим один из четырех способов.
Преобразователи среды передачи данных
Преобразователи среды передачи данных служат для перехода от медного кабеля 10BaseT к оптоволоконному кабелю и обратно. Как правило, пара преобразователей подключается между портом концентратора и рабочей станцией или контроллером. Между двумя преобразователями среды передачи данных располагается оптоволоконный кабель, длина которого может составлять несколько сотен или даже тысяч метров. Каждая рабочая станция или контроллер в сети управления может быть подключена к концентратору через преобразователи среды, что позволяет значительно увеличить расстояние между узлами. Используемые в системе DeltaV преобразователи среды передачи данных должны быть совместимы со стандартом IEEE 802.3 (Ethernet), соответствовать спецификации 10Base-FL (для оптоволоконного кабеля) и содержать как минимум один разъем 10BaseT для медного кабеля и одну пару разъемов типа ST для оптоволоконного кабеля. Для каждого оптоволоконного кабеля требуется два преобразователя, один — для перехода от медного кабеля к оптоволоконному, а другой — для обратного перехода к медному кабелю.
Преобразователи среды передачи данных выпускаются многими производителями оборудования. Имеются устройства для передачи сигнала на расстояние от нескольких сотен метров до 15 километров. Среди компаний, выпускающих подобное обордование, можно назвать Black Box (www.blackbox.com), Hirschmann (www.hirschmann.de), Transition Networks (www.transiti o n.com), и другие.
5.4 Выбор структуры контроллера и его состава
Как показано на Рис. 5.2 мы используем резервированный контроллер, что повышает общую надежность функционирования системы. Резервированный контроллер состоит из двух плат. Контроллер выполняет функции управления и контролирует обмен данными между подсистемой ввода-вывода и сетью управления. Контроллер можно сконфигурировать для выполнения следующих функций: сбор данных, вычисления, (последовательное) дискретное управление, непрерывное управление (регулирование) или управление периодическими процессами (рецептурами).
На рисунке 5.3 показан резервированный контроллер, установленный на 2-слотовых несущих панелях.
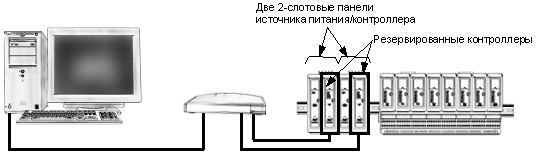
Рисунок 5.3 - Резервированный контроллер и несущие панели
Выбор оборудования контроллера
В системе DeltaV используются контроллеры M3, M5 и М5 Плюс. Условие, ограничивающее расширение системы, говорит о том, что при наличии более 3 контроллеров, добавление каждого следующего контроллера будет приводить к меньшему приросту производительности, чем добавление предыдущего.
Каждый модуль контроллера устанавливается в правый разъем 2-слотовой несущей панели источников питания контроллеров, поэтому для каждого резервированного контроллера устанавливаем две 2-слотовые несущие панели.
Для реализации нашей системы будем использовать контроллер М5 Плюс, т.к. он имеет большую совместимость с программным пакетом Профессиональный Плюс.
Лицензирование контроллер ов
Необходимым условием законченности системы DeltaV является ее лицензирование в масштабе всей системы. Для этого подсчитывается общее число ТПУ (тэги параметров устройств) в системе DeltaV, которые будут использоваться для мониторинга процессов, и общее число ТПУ, которые будут использоваться для управления процессами. Под ТПУ, используемым для мониторинга, понимается ТПУ, выполняющий следующие функции: просмотр, архивирование (запись истории), масштабирование и генерация алармов. ТПУ, выполняющий любые другие функции, кроме перечисленных, рассматривается как ТПУ, используемый для управления.
Тэги только для отображения
Тэги только для отображения (ТДО) не подлежат лицензированию, они не рассматриваются как ТПУ и не включаются в общее число тэгов при подсчете ТПУ. Число ТДО ограничивается функциональными возможностями продуктов DeltaV. Об ограничениях подробно рассказывается в Приложении A. Для использования в системе DeltaV ТДО проходят через контроллер DeltaV и через интеграционную станцию. ТДО не используются никакими модулями или функциональными блоками, реализующими функции управления или функциональность алармов, однако они могут отображаться, регистрироваться в трендах и сохраняться в истории на рабочих станциях.
5.5 Подсистема Ввода/Вывода
Подсистема ввода-вывода DeltaV может включать в себя интерфейсные блоки для традиционного аналогового и дискретного ввода-вывода, модулей HART, последовательного интерфейса, полевой шины FOUNDATION, а также шин AS-i и Profibus DP. Каждый интерфейс состоит из электронной платы в/в и клеммного блока. К контроллеру можно подключить до 64 интерфейсов в любом сочетании, если общее число ТПУ не превышает 500. В системе DeltaV также может присутствовать искробезопасная подсистема в/в для подключения полевого оборудования, размещаемого во взрывоопасной зоне. Рассмотрим интерфейсные блоки необходимые для реализации нашей системы.
К ним относятся блоки традиционного аналогового ввода-вывода, последовательного интерфейса, полевой шины FOUNDATION.
Блоки традиционного аналогового ввода-вывода
Система DeltaV поддерживает унифицированные аналоговые сигналы 4-20 мА, 1-5 В, милливольтные, омические сигналы, стандартные входные сигналы термопары и термосопротивления. Это наиболее подходящий стандарт подключения блоков, т.к. большинство аналоговых сенсоров работает именно в таком режиме (4-20 мА).
Блоки последовательного интерфейса
Каждая плата последовательного интерфейса имеет 2 порта. Каждый порт поддерживает до 16 наборов данных. Набор данных представляет собой непрерывную область до 100 регистров/реле в ПЛК. Если порт настроен как RS-485, то можно использовать шлейфовое подключение устройств. 16 наборов данных могут быть распределены по любому количеству устройств от 1 до 16, в зависимости от объема и структуры данных. В данном случае порт необходим для считывания информации хранящейся в ПЛК, а также для организации местного пульта наблюдения, реализующего функции тестирования.
Блоки полевой шины FOUNDATION
Интеллектуальная несущая панель H1 – это 2-слотовая панель, устанавливаемая рядом с полевыми устройствами. Несущая панель с платой дискретного входа и дискретного выхода обеспечивает преобразование обычных дискретных сигналов в сигнал полевой шины FOUNDATION. Благодаря этому возможна передача дискретных сигналов в том же сегменте полевой шины, где передаются аналоговые сигналы, что способствует сокращению приобретаемых сегментов, а это экономия в потребляемой мощности.
Несущая панель H1 стыкуется с сегментом полевой шины, как любое другое устройство полевой шины. Питание к несущей панели и установленным платам дискретного ввода-вывода подводится от дополнительного внешнего источника. Несущая панель крепится на рейке DIN (возможна установка только на T-рейку), стене или панели. На рисунке 5.4 указаны габаритные размеры несущей панели H1.
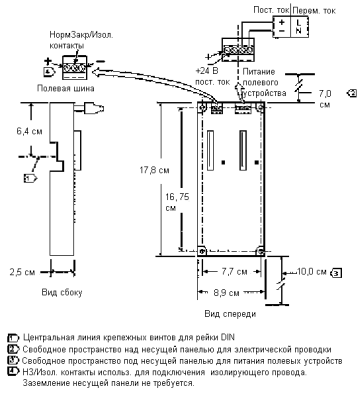
Рисунок 5.4 - Несущая панель H-1
Платы H1 полевой шины FOUNDATION устанавливаются на стандартной 8-слотовой несущей панели DeltaV. Каждый модуль Fieldbus H1 позволяет подключить два сегмента полевой шины. На каждом сегменте H1 система поддерживает до 16 устройств.
В нашей системе будем использовать один модуль Н1 с полной загрузкой обоих сегментов.
Требования, предъявляемые при разработке, во многом соответствуют параметрам выбранного нами оборудования, т.к. указания перечисленные ниже были полностью соблюдены.
1. К одной интерфейсной плате H1 может подключаться до двух сегментов полевой шины.
2. На каждом сегменте полевой шины может быть до 16 устройств (датчиков, клапанов и др.
3. Для каждого сегмента требуется отдельный регулятор напряжения для питания устройств, подключенных к сегменту. Как показано на рисунке 5.5, такой регулятор получает 24 вольт постоянного тока, изолирует его и подает питание на сегмент полевой шины. Напряжение 24 вольт постоянного тока на вход регулятора напряжения обычно берутся с выхода группового блока питания, питающего традиционные приборы и полевые устройства в/в.
4. Суммарная длина всех кабелей сегмента H1 не должна превышать 1.9 километра.
5. Максимальная длина отводного кабеля между устройством и клеммной коробкой составляет 120 метров.
6. Каждый конец магистрального кабеля полевой шины должен заканчиваться терминатором. Левый конец магистрального кабеля терминирован внутренним терминатором регулятора питания.
7. Для сборки магистрального и отводного кабеля (кабелей) используйте стандартные кабели типа A (Belden 3076F), штырьковые коннекторы VE6957 и гнездовые коннекторы VE6958.
8. Все неиспользуемые разъемы клеммных коробок должны быть закрыты заглушками VE6955.
9. На каждом полевом устройстве необходимо установить адаптер кабельного ввода VE6959. Этот адаптер вворачивается в ½-дюймовый NPT кабельный ввод прибора и преобразует клеммник прибора в штырьковой коннектор, к которому подключается гнездовой коннектор VE6958 кабеля полевой шины.
10. Искробезопасная система на базе полевой шины включает в себя 8-канальный аналоговый ввод 4-20 мА, 8-канальный аналоговый вывод 4-20 мА, 16-канальный дискретный ввод, 4-канальный дискретный вывод, а также искробезопасный источник питания. Изолятор локальной шины изолирует искробезопасную подсистему ввода-вывода от контроллера и системного источника питания.
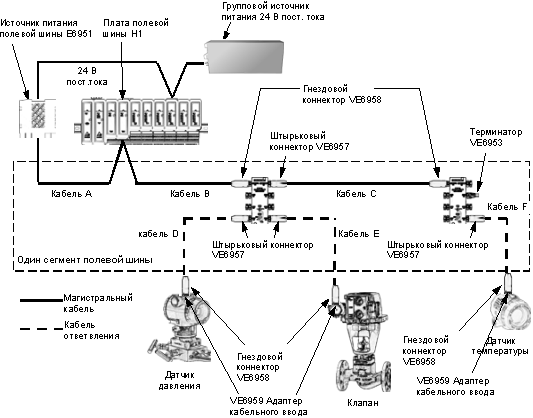
Рисунок 5.5 - Один сегмент полевой шины H1
В общем случае наша система принимает вид, представленный на Рис. 5.6
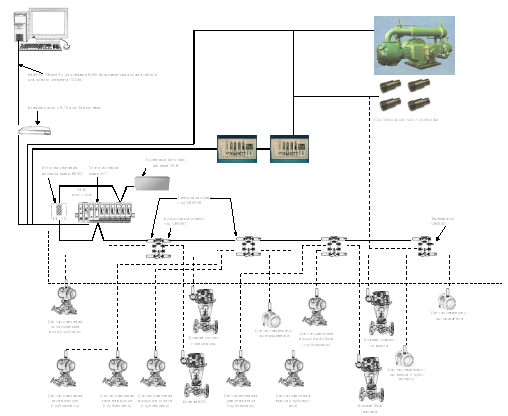 Рис. 5.6 - Структурная
схема САУ компрессора
Рис. 5.6 - Структурная
схема САУ компрессора
Основные характеристики устанавливаемых модулей указано в Приложении А.
5.6 Выбор источника питания
5.6.1 Системный транзитный источник питания VE5002 (12Vdc/12Vdc)
Системный источник питания VE5002, показанный на Рис.5.7, как правило, используется в системах DeltaV с несколькими контроллерами и подсистемами в/в, где общее питание системы осуществляется от сети переменного тока 120/240 Vac. Источник питания VE5002 принимает 12 Vdc и преобразует в необходимые системе напряжения 12 В, 5 В и 3.3 В для питания контроллера и подсистемы ввода-вывода. Этот источник питания устанавливается непосредственно слева от платы контроллера.
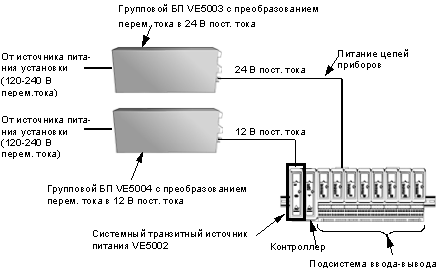
Рисунок 5.7 - Системный транзитный источник питания VE5002
В нашем случае потребуется несколько источников питания ввиду следующих факторов: а) наличия резервного контроллера, б) большого числа плат ввода-вывода, используемых контроллером, в) необходимостью резервирования системного питания.
Вторым источником питания установки 120/240 Vac будем использовать групповой источник питания VE5004 120-240 Vac/12 Vdc.
Заземление системы при использовании источника питания VE5002
Для достижения максимальной производительности системы DeltaV необходимо правильно заземлить эту систему. Заземление для цепей переменного и постоянного тока должно выполняться раздельно вплоть до общей точки заземления установки. На Рис.5.8 приведена электрическая схема заземления системы DeltaV, где используется системный источник питания VE5002.
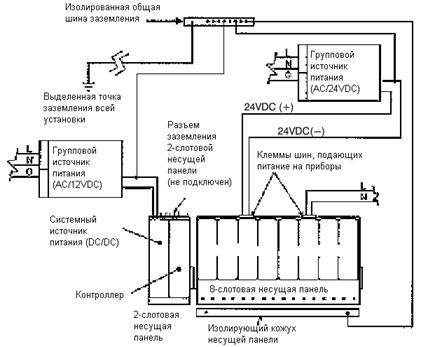
Рисунок 5.8 - Электрическая схема заземления системы DeltaV, где используется транзитный источник питания VE5002
5.6.2 Групповой источник питания VE5004 (120-140 Vac/12 Vdc)
Групповой источник питания VE5004 принимает 120/230 В переменного тока и выдает 24 В постоянного тока, подаваемые на системный источник питания VE5002 или на системный транзитный источник питания VE5008. Групповой источник питания VE5004 обеспечивает мощность, достаточную для питания 4 наборов симплексных контроллеров и модулей ввода-вывода, к каждому из которых подключен источник питания VE5002 (см. Рис. 5.9).
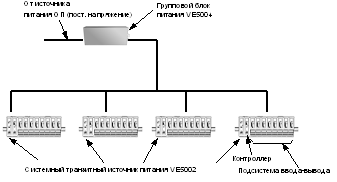
Рис.5.9 - Комбинация источников питания VE5004
Резервирование источников питания VE5002
Если в системе используются резервированные контроллеры, то необходимо использовать вторую пару источников VE5002, как показано на Рис.5.10. Для каждого контроллера требуется выделенный транзитный источник питания, а использование двух источников VE5004 исключает останов системы из-за отказа одного источника питания.
В случае резервированного контроллера вторая 2-слотовая панель обеспечит также посадочное место для второго контроллера резервной пары (см. Рис. 5.10).
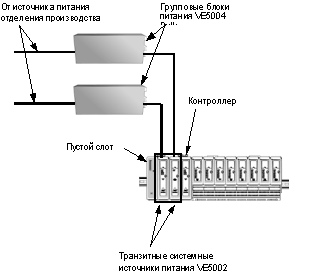
Рис. 5.10 - Резервирование источников питания VE5002 для симплексного контроллера
5.6.3 Системный искробезопасный источник питания
Для питания модулей искробезопасного в/в требуется искробезопасный (ИБ) источник питания. ИБ источник питания принимает напряжение в диапазоне от 18.5 до 36 Vdc и преобразует его в 12 Vdc с максимальным током 5А.
Источник Бесперебойного Питания
Первичный источник питания, обеспечивающий систему DeltaV, не должен допускать перебоев энергоснабжения длительностью долее 20 миллисекунд. Перерыв питания более 20 миллисекунд может привести к потере управления, временной потере конфигурации системы и данных процесса. Если первичная сеть энергоснабжения не удовлетворяет требованию 20 мс, то вместе с оборудованием системы DeltaV следует заказывать Источники Бесперебойного Питания (ИБП).
Для нашей системы будем использовать ИБП модели VE5006. Наличие ИБП оправдано следующими условиями:
־ В системе используется сочетание транзитного системного источника питания VE5002 и группового блока питания VE5004.
־ Необходимо обеспечить бесперебойное питание 24 В для полевых устройств, подключенных к подсистеме ввода-вывода DeltaV.
5.7 Выбор датчиков полевой шины FOUNDATION
Датчиками давления из семейства SMART FAMILY Модели 3051 фирма Rosemount Inc. устанавливает новый стандарт в технологии измерения давления. Этот новейший датчик сочетает в себе бесподобные эксплуатационные качества, гибкость платформы Coplanar и продвижение с технологией будущего. Эксплуатационные характеристики новой Модели 3051 гарантируют точность и стабильность при большинстве требуемых условий.
Модель 3051 переопределяет качество датчиков давления новой характеристикой всесторонней оценки качества. Для обеспечения лучшего измерения качества при условиях реального процесса эта характеристика сочетает в себе оценки эталонной точности, влияния температуры и давления в линии. Теперь вместо того, чтобы полагаться только на одну эталонную точность, мы можем выбрать датчик, основываясь на действительных эксплуатационных характеристиках.
Выбор в пользу датчиков этой серии был сделан исходя из следующих соображений:
־ Постоянство характеристик во времени;
־ Уменьшенная изменчивость (большее время отклика);
־ Техническая развитость модернизации и замены;
־ Гибкость платформы Coplanar;
־ Многообразие выходных сигналов.
־ Жидкокристаллический индикатор;
־ Местная подстройка нуля и регулировка шкалы;
־ Защита от переходных процессов;
־ Большой срок службы.
Все сенсоры, занятые измерением давления, будут этой серии, так как выпускаемые типы полностью подходят для нашей системы.
5.7.1 Датчик перепада давления модели 3051С (используется на трубопроводе между входом и выходом компрессора)
־ Превосходное исполнение: точность 0,075%, изменение шкалы 100:1;
־ Перепад давления: калиброванные шкалы от 0,5 дюймов H2O до 2000 psi;
־ Избыточное давление: калиброванные шкалы от 2,5 дюймов H2O до 4000 psig;
־ Измерение абсолютного давления: калиброванные шкалы от 0,167 psia до 4000 psiа;
־ Нержавеющая сталь, Hastelloy C_ Monel, Тантал (только CD и CG) и покрытые золотом изоляторы технологической среды из Monel;
־ Компактная, жесткая и легкая конструкция для легкой установки.
Разборная схема датчика представлена на Рис. 5.11.
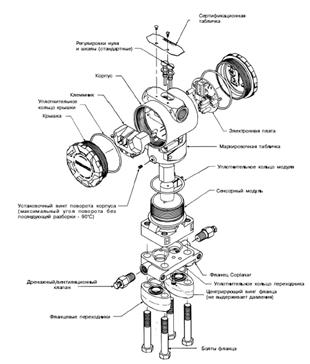
Рис. 5.11 - Типичный датчик 3051 С в разборном состоянии
5.7.2 Датчик избыточного и абсолютного давления модели 3051Т (используется на трубопроводе входа и выхода газа)
־ Превосходное исполнение: точность 0,075%;
־ Абсолютное давление: калиброванные шкалы от 0,3 дюймов H2O до 10000 psia;
־ Избыточное давление: калиброванные шкалы от 0,3 дюймов H2O до 10000 psig;
־ Изоляторы технологической среды из нержавеющей стали и Hastelloy C;
־ Конструкция с одним изолятором;
־ Силиконовая или инертная заполняющая жидкость;
־ Имеются соединения с процессом в стандарте DIN и совместимое с автоклавом;
Монтажная и размерная схемы представлены на Рис. 5.12.
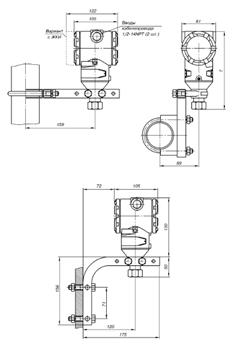
Рис. 5.12 - Монтажная и размерная схема датчика 3051Т
5.7.3 Датчик давления модели 3051S (используется на трубопроводе анализа давления воды, масла воздуха)
־ Smart - единственный в мире экономичный датчик давления
־ Высокое качество, точность 0,075%
־ Модели с измерением перепада, избыточного и абсолютного давления;
־ Полный набор функциональных элементов модели 3051С, включая цифровой индикатор;
־ Работает от источника напряжения 6-12 В постоянного тока;
־ Потребление энергии от 18 до 36 мВт по сравнению с 200 мВт для типовых датчиков с выходом 4-20 мА;
־ Выбираемые выходы 0,8-3,2 и 1-5 вольт;
־ Сенсорный модуль такой же, как у стандартной (4-20 мА) модели 3051С.
־ Калиброванные шкалы от 2,5 дюймов H2O до 2000 psi;
־ Конструкция небольшого объема с фланцем Coplanar обеспечивает снижение температурного эффекта;
־ Большое разнообразие выбора материалов для мембранных систем и соединений с процессом;
־ Уплотнители удовлетворяют санитарному стандарту 3-А;
־ Высокая способность перестройки диапазона сокращает инвентаризационные затраты;
־ Измерение перепада давления и избыточного давления;
־ S1 Одна выносная мембрана;
־ S2 Две выносные мембраны.
Общий вид датчика модели 3051S представлен на Рис. 5.13.

Рис. 5.13 - Датчик модели 3051S в общем виде
5.7.4 Датчик температуры пирометрический серии М18 (используется для анализа температуры воздуха в корпусе двигателя)
־ Диапазон измеряемых температур: 0…300 0С;
־ Длина волны: 8…14 нм;
־ Гистерезис: 5%;
־ Повторяемость: 1 0С;
־ Время отклика выхода: 25 мс;
־ Готовность к работе после включения: 1.5 с;
־ Индикация: два световых диода;
־ Время прогрева: 5 мин.;
־ Класс защиты: IP67;
־ Климатическое исполнение: Т3 (- 20…700С);
־ Материал корпуса: нержавеющая сталь;
Размерная схема представлена на Рис. 5.14.
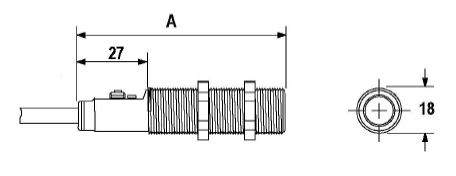
Рис. 5.14 - Размерная схема датчика М18
5.8Выбор аналоговых датчиков
Разнообразие предлагаемых аналоговых датчиков дает огромные возможности в подборе оборудования с необходимыми для нас показателями. Основными факторами при подборе средств измерения были:
־ Широкий функциональный набор;
־ Повышенные термоэлектрическая стабильность и рабочий ресурс;
־ Малый показатель тепловой инерции;
־ Дополнительная защита термоэлектродов от воздействия рабочей среды;
־ Наличие возможности индикации состояния и измеряемых величин;
־ Диагностика и самодиагностика объекта;
־ Взрывозащитное исполнение.
5.8.1 Температурный преобразователь ТСМУ – 274 с унифицированным выходным сигналом (расположен непосредственно в месте анализа температуры смазки компрессора и охлаждающей воды)
־ Выходной сигнал: 4-20 мА;
־ Диапазон преобразуемых величин: 0-180 0С;
־ Предел допускаемой основной приведенной погрешности: 0.25, 0.5;
־ Зависимость выходного сигнала от температуры: линейная;
־ Максимальная температура применения: 8000С;
־ Маркировка взрывозащиты: 1ExdIICT6 с видом взрывозащиты взрывонепроницаемая оболочка d;
־ Показатель тепловой инерции: 40 с;
־ Срок службы: не менее 5 лет;
־ Межповерочный интервал: 1 год;
־ Климатическое исполнение: Т6 (от – 20 0С до + 45 0С).
Габаритные и присоединительные размеры датчика представлены на Рис. 5.15.
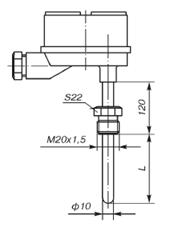
Рис. 5.15 - Температурный преобразователь ТСМУ – 274 с унифицированным выходным сигналом с габаритными размерами
5.8.2 Термоэлектрический преобразователь ТХА 241 (анализ состояния температуры опорного подшипника)
־ Количество чувствительных элементов: 1;
־ Чувствительный элемент: кабель термопарный КТМС;
־ Класс допуска: 2;
־ Диапазон измеряемых температур: - 40…200 0С;
־ Рабочий спай: изолированный;
־ Поверка: раз в год;
־ Климатическое исполнение: Т3 (верхнее значение температуры окружающей среды + 850С);
־ Срок службы: не менее 3 лет.
Габаритные и присоединительные размеры датчика представлены на Рис. 5.16.
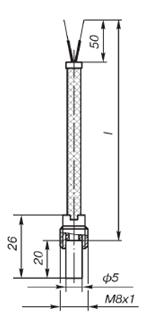
Рис. 5.16 - Термоэлектрический преобразователь ТХА - 241 с габаритными размерами
5.8.3 Датчик вибрации серии ТХ 5634 (анализ состояния двигателя)
־ Диапазон частот: 2 Гц…10 кГц (ускорение), 2 Гц…1 кГц (скорость);
־ Принцип измерения: пьезо электрический;
־ Линейность: ± 1%;
־ Температура окружающей среды: - 25 0С…80 0С;
־ Аналоговый выход: 4-20 мА;
־ Материал: нержавеющая сталь;
־ Исполнение: IP67;
־ Маркировка взрывозащиты: EEX ia I;
־ Максимальная вибрация: 50g;
־ Диапазон измерений: 1,2,5,10,20 g (ускорение), 10,20,25,50,10 мм/с (скорость);
־ Резонанс: 18 кГц (номинал).
Общий вид датчика представлены на Рис. 5.17.

Рис. 5.17 - Датчик вибрации серии ТХ 5634 в общем виде
5.8.4 Измеритель осевого сдвига ротора ТС – 201 А в комплекте с датчиком типа КТ - 136С (анализ состояния двигателя)
Система отслеживания осевого сдвига - одна из главных в общем комплексе мероприятий по защите компрессорных машин. Другие нарушения в работе машин также могут приводить к катастрофическим последствиям, но ухудшение работы или дефект упорного подшипника может произойти при очень слабых признаках опасности и за очень быстрый период, а это приводит к полному разрушению машины. Поэтому в первую очередь требуются технические приемы для измерения осевого сдвига. При этом необходимо избегать ошибок при установке соответствующих систем защиты.
־ Диапазон измерения осевого сдвига ротора: от -2,0 до 1,5 мм;
־ Пределы допускаемой абсолютной погрешности прибора при измерении зазора: (10 + 0,07 •Z) мкм;
־ диапазон значений выходного тока: 4-20 мА;
־ Время установления рабочего режима, не более: 5 мин;
־ Средняя наработка на отказ, не менее: 10000 часов;
־ Средний срок службы, не менее: 8 лет;
־ Среднее время восстановления работоспособности, не более: 2 часов;
־ Температура окружающего воздуха: 10…55 0С;
־ Относительная влажность воздуха при температуре 35 С, (без конденсации): 93.3%.
5.9Функциональный блок MICROMASTER 430
Преобразователи частоты сегодня возрастающими темпами заменяют механические решения регулирования скорости вращения электрических двигателей. Они позволяют осуществлять регулирование проще и с меньшими расходами на техническое обслуживание. Фирма «Сименс» производит преобразователи частоты уже несколько десятилетий.
Сейчас на Российском рынке появились новые преобразователи частоты четвертого поколения, имеющие ещё более широкие возможности. Среди появившихся новшеств следует отметить расширение рабочего температурного диапазона, увеличения выпускаемого диапазона мощностей, невысокую цену, универсальность всех основных опций, и возможность доступа практически ко всем параметрам, что дает возможность «тонко» настроить преобразователь.
Одним из таких является MICROMASTER 430, основные параметры которого представлены ниже:
־ Диапазон мощностей: 7,5 кВт - 250 кВт 400 В 3 AC;
־ Диапазон напряжений: 380 - 480 В +/- 10%;
־ Входная частота: 47- 63 Гц;
־ Коэффициент мощности: cos Φ ≥ 0.7;
־ Пусковой ток: не больше, чем номинальный;
־ КПД: 97%;
־ Рабочая температура: - 10 до +40 °C;
־ Температура хранения: - 40 до +70°C;
־ Допустимая относительная влажность воздуха: 95%;
־ Степень защиты: IP20 / NEMA 1;
־ Выходная частота: 0 - 650 Гц;
־ Разрешение выходной частоты: 0.01 Гц;
־ Перегрузочная способность 110% от номинального тока в течение 60 c, 140% % от номинального тока в течение 3 c ( каждые 300 с.);
־ Способ регулирования: потокосцеплением (FCC), линейный (U/f),
־ квадратичный (U/f2), режим энергосбережения, произвольная настройка;
־ Цифровые воды: 6 (18 функции);
־ Аналоговый вход: 0-10 В, 0-20 мА, -10 В / +10 В биполярный, разрешение 10 бит;
־ Релейный выход: 30 В DC 2 A, 240 В AC 0.8 A параметрируемый;
־ RS485 интерфейс: есть;
־ Способ торможения: генераторное, динамическое, комбинированное;
־ Быстрое ограничение тока: есть;
־ Функции защиты по:
a. пониженному напряжению;
b. перенапряжению;
c. перегрузке;
d. включению на землю;
e. короткому замыканию;
f. блокировке двигателя;
g. перегреву двигателя;
h. перегреву преобразователя;
־ Регулятор: встроенный ПИД- регулятор, Встроенный источник питания 24 В для датчика ПИД-регулятора;
־ Нормы: разрешение Госгортехнадзора.
Основная схема принципа регулирования представлена на Рис. 8.18.
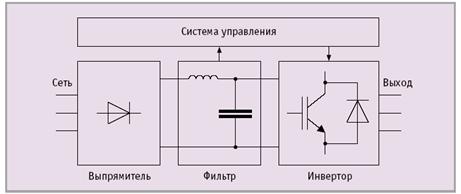
Рис. 5.18 - Структурная схема преобразователя частоты с промежуточным контуром постоянного тока
5.10 Запорная арматура системы управления
Трубопроводная арматура (вентили, обратные клапаны) представляют собой устройства, предназначенные для управления потоками газа, транспортируемого по трубопроводам, отключения одного участка трубопровода от другого, включения и отключения технологических установок, аппаратов, сосудов и т.д.
К характерным особенностям работы запорной арматуры на КУ относятся: высокое давление транспортируемого газа (до 7,5 МПа), относительно высокая температура газа на выходе КС (60-130°С), наличие в составе газа механических примесей и компонентов, вызывающих коррозию, эрозию металла и т.д.
К запорной арматуре предъявляются основные требования: обеспечивать герметичное отключение отдельных участков газопровода, сосудов, аппаратов от технологических газопроводов и длительное время сохранять эту герметичность, иметь высокую работоспособность, быть коррозионно-стойкой и взрывобезопасной.
На КУ применяется запорная арматура различного типа, но для нашей системы будем использовать клапана компании EMERSON Process Management. Возможность использования клапанами коммуникационных протоколов Fieldbus позволяет применять их в составе нашей систем автоматизации.
Клапан конструкции GX
Регулирующий клапан
конструкции GX предназначен для управления потоком среды (регулирование или
отсекание) и представляет собой односедельный клапан с направлением потока
вверх, с ввинчиваемым седлом, с одним из трех типов трима (комплекта внутренних
деталей): с направляющей по штоку, с направляющим седлом или с разгруженным
плунжером. Привод пневматический (МИМ) с несколькими пружинами.
Для клапана каждого размера возможно исполнение с неразгруженным плунжером, которое
исключает "мертвые зоны", с возникающей в них полимеризацией рабочей
среды. Полно поточный трим и трим с ограниченной пропускной способностью могут
иметь как линейную, так и равно процентную характеристику потока.
Ниже перечислены факторы, на основе которых был сделан выбор данного оборудования:
־ стабильность потока через тракт клапана;
־ полный спектр материалов, включая сплавы;
־ исполнения с высокой пропускной способностью;
־ высокая унификация деталей для всех типоразмеров;
־ заменяемый комплект внутренних деталей (трим);
־ реверсируемый в полевых условиях привод;
־ простота технического обслуживания.
Общий вид данного класса представлен на Рис. 5.19.

Рис. 5.19
5.11 Программная реализация обеспечения для контроля и управления
Программное обеспечение для контроля и управления DeltaV поддерживает разработку управляющих стратегий с помощью языков, соответствующих стандарту IEC 61131-3, а также функциональных блоков FOUNDATION fieldbus. Компоновка и изменение этих стратегий производится в графическом режиме. Визуальная разработка стратегий интуитивно понятна, что помогает начинающим пользователям быстро добиться результатов. Языки управления IEC 61131-3, включают в себя Диаграммы функциональных блоков (ДФБ), Диаграммы функциональных последовательностей (ДФП) и структурированный текст (СТ), на основе которых реализуются системы практически любой сложности.
Диаграммы функциональных блоков (ДФБ)
Диаграммы функциональных блоков используются в DeltaV для реализации непрерывно выполняемых вычислений, контроля процесса и стратегий управления. Различные блоки на диаграмме соединяются графическими «проводами». По каждому «проводу» передается один или несколько блоков данных. Весь обмен данными в системе DeltaV выполняется автоматически. Функциональные блоки DeltaV реализованы в соответствии со стандартом FOUNDATION fieldbus, однако расширены и дополнены для большей гибкости при разработке стратегий управления. Совместимые со стандартом полевой шины функциональные блоки позволяют реализовать распределенное управление в полевых приборах.
Структурированный текст (СТ)
С помощью структурированного текста вы можете писать программы сложных расчетов, используя широкий набор алгебраических и тригонометрических функций и операторов. Кроме того, вы можете составлять сложные логические выражения, используя условные и итерационные структуры.
Сбор данных
Отображение, построение трендов, генерация алармов и использование внешних данных таким же образом, как и собственной информации в/в DeltaV. Все приложения DeltaV могут получать доступ к внешним данным, как к собственной информации DeltaV. В процессе выполнения механизм оповещения об исключительных ситуациях передает данные в соответствующее системное приложение. База данных глобальной конфигурации делает управление этими данными и их использование очень простым.
5.11.1 Разработка алгоритмов
Система DeltaV использует параметры в функциональных блоках, модулях, конфигурации Вв/Выв и диагностических функциях. Параметры обеспечивают пользователя значениями переменных, которые являются определенными константами различных приложений и могут описывать эти приложения. Это позволяет пользователю конфигурировать логику в блоке или модуле, читать или писать по конкретным адресам Вв/Выв или диагностировать неисправности системы.
В системе DeltaV используется модульный принцип при разработке стратегии управления. Управляющие модули являются уникальными поименованными управляющими единицами в системе DeltaV. Функциональный блок – это основной компонент управляющего модуля, то есть, это блок, из которых строится управляющий модуль. Каждый функциональный блок содержит в себе управляющий алгоритм (такой, как ПИД, Аналоговый Выход или Аналоговый Вход). Алгоритмы Усовершенствованного Управления процессом также включены в функциональные блоки, например, регулирование с функцией Нечеткой логики. Будучи соединенными вместе в определенной последовательности, несколько функциональных блоков образуют управляющий модуль.
Принцип действия управляющих модулей КУ будет основываться на алгоритмах, описанных в п. 2.3.
Кроме этого, необходимо разработать четкий механизм событий и алармов, согласно которым и будет производится управление и поддержание процесса на необходимом уровне.
Событие – есть важное изменение состояния во время выполнения управляющего процесса. Событие может быть зарегистрировано или использовано для оповещения оператора.
Система DeltaV позволяет создавать уставки (пределы) алармов для функциональных блоков и управляющих модулей. Эти уставки можно использовать для создания звуковой или визуальной сигнализации об аларме для оператора.
Система DeltaV поддерживает и контролирует большое число типов системных и определенных пользователем событий, которые регистрируются в Журнале Событий. Алармы являются специальным типом событий, а именно такие, которые оператор видит в приложении Интерфейс Оператора.
Система DeltaV поддерживает предопределенные (стандартные) алармы, а также алармы, определенные пользователем.
Алармы, определенные пользователем, поддерживаются как для уровня функциональных блоков, так и для уровня модулей (за исключением модулей аппаратов и модулей фазовой логики). Алармы пользователя ссылаются на существующие параметры или выражения, определенные пользователем. Настройка алармов выполняется простым выбором из списка вариантов.
Основные события, протекающие в системе, относятся к состоянию параметров регулируемых величин, т.е. рабочий диапазон, состояние объекта регулирования, события самодиагностики, критичные пределы и авария. Пределы аварийных сигналов формируются на основе нормативных данных регламента всего комплекса гидроочистки. Перечень блокировок и сигнализаций, соответствующий данному регламенту, представлен в таблице 1.3.
Однако каждый Аларм предусматривает взаимодействие нескольких параметров, которые определяют логику включения предупреждения, а затем и перевод системы в другое состояние. Принципиальная схема построения логики предупреждений представлена на Рис. 2.1. Важно отметить, что при срабатывании блокировки по определенному параметру, система запоминает его и предоставляет оператору возможность либо с квитировать его, либо записать в историю процесса для последующего анализа.
Кроме основного алгоритма функционирования система включает в себя малые подпрограммы, реализующие стандартные процедуры:
־ Временные параметры опроса датчиков (см. п. 2.4);
־ Регуляторы температуры;
־ Регуляторы давления;
־ Включения резервного оборудования, в зависимости от процедурного состояния;
־ Самодиагностика сети и оборудования, переключение питающих сетей;
־ Регулирование приводным двигателем компрессора, с подачей сигнала на управляющий блок.
6. ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ
Внедрение автоматической системы управления компрессорной установкой комплекса гидроочистки моторного топлива решает следующие задачи
- Полностью автоматическая система управления компрессорной установкой не требует участия человека в ее рабочем цикле, вследствие чего происходит высвобождение рабочих занятых на Л-24/6 (установка гидроочистки моторного топлива);
- Снижение частоты и трудоемкости обслуживания;
- Повышение надежности системы управления.
- Уменьшение время простоя связанного с технологическим обслуживанием.
Специфика работы Л-24/6 (установка гидроочистки моторного топлива) предусматривает непрерывный цикл производства. Без функционирования КУ невозможна работа всего комплекса в целом, а простой Л-24/6 в течение суток приносит убытки в сумме более 1000000 рублей по причине не выработки сырья. По этому снижение периодичности обслуживания КУ и ее отказоустойчивость способно снизить убытки, возникающие по причине простоя оборудования.
В широко развитой нефтеперерабатывающей отрасли техническое развитие стоит на одном из первых мест, которому уделяют особое внимание, т.к. владельцы сами заинтересованы в повышение энергоемкости своих предприятий. В виду чего, весь механизм работы построен на принципе высоко организованной автоматической системы, где каждый узел имеет свои правила-нормы оперативного контроля.
Как показывает многолетняя практика эксплуатации компрессорных установок, аварийная остановка КУ, связанная с малой технической оснащенностью, отсутствия самодиагностики оборудования и низким критическим порогом обнаружения отклонений, возникает 4-6 раз в году, при этом простой составляет от 4 до 24 часов. Для скорейшего восстановления работоспособности КУ требует постоянное присутствие ремонтного персонала на установке. А это очень дорого обходится, так как персонал практически не задействован, ведь проведения обслуживания механизмов производится в установленное время и требует не более 400 часов рабочего времени в год. Упрощение обслуживания и применение функций самодиагностики позволяют быстро выявлять причину отказа, а модульный принцип построения заменять неисправные компоненты системы. Применение системы раннего оповещения о возникающих неполадках позволяет своевременно их устранить и не останавливать КУ по причине аварии.
До внедрения АСУ, оператору приходилось периодически контролировать работу установки и производить корректировку ее изменений. Неисправности выявлялись специально подготовленным специалистом в течении длительного времени, и устранялись как правило в течение суток. Неисправность определялась, как правило, после аварийной остановки КУ. Не возможно было диагностировать неполадки (только отклонения норм от технических параметров) во время работы системы управления. Требовалось содержать ремонтную бригаду и нескольких операторов.
Теперь же весь контроль работы КУ, производится с центрального пульта управления КУ или щита пульта управления, расположенного непосредственно в КС, причем при наступлении предаварийной ситуации оператор своевременно информируется, что позволяет ему устранить неполадку, диагностика была произведена системой управления до наступления аварийной ситуации. Что позволяет уменьшить количество персонала задействованного для управления КУ и ее ремонта. Для обслуживания нескольких КУ может быть создана одна бригада ремонтников, которая обслуживала бы несколько станций.
Управление компрессорной установкой требовало постоянное присутствие на станции, как минимум одного оператора, который бы контролировал работу КУ и обслуживал ее.
Такой подход позволяет централизовано получать и обрабатывать всю информацию о работе станции одним человеком, что повышает качество принимаемых им управляющих решений.
6.2 Технико-экономические показатели эффективности от внедрения новой системы автоматизации
В условиях бурного развития техники важным является вопрос о соответствии внедренного оборудования на предприятии улучшенным нормам и показаниям работы оборудования. Поэтому необходим точный расчет затрат на покупку и монтаж предлагаемого на рынке оборудования, что позволит сделать правильный его выбор.
6.2.1 Экономия в заработной плате высвобождаемых рабочих
В нашем случае происходит высвобождение 1 оператора и 6 обслуживающего персонала АСУ (КиПА – 2; Электронщики – 2; Наладчики - 2).
Среднегодовая заработная плата оператора составляет 39240 руб. (3270 руб *12).
Среднегодовая заработная плата КиПА составляет 47088 руб. (3924руб.*12)
Среднегодовая заработная плата Электронщик составляет 73260 руб. (6105руб.*12)
Среднегодовая заработная плата Наладчика составляет 31392 руб. (2616руб.*12)
Экономию в заработной плате высвобождаемых в результате внедрения АСУ ТП работников можно определить по формуле:
Зосв = k1k2k3 ּ Зср.р. ּ Nосв.р.; (6.1)
где k1k4 – коэффициенты премиальной надбавки соответственно для рабочих и инженерно-технических работников (ИТР), равны 1,4;
k2 – коэффициент, учитывающий дополнительную зарплату, равен 1,2;
k3 – коэффициент отчислений на социальное страхование, равен 1,356;
Зср.р. – средняя годовая заработная плата высвобождаемых рабочих;
Nосв.р – число высвобождаемых рабочих, 7;
ЗОСВ.ОПЕР = 1,4*1,2*1,365*39240*1 = 89985.168 руб;
ЗОСВ.КиПА = 1,4*1,2*1,365*47088*2 = 215964.4 руб;
ЗОСВ.ЭЛЕКТ = 1,4*1,2*1,365*73260*2 = 335999.66 руб;
ЗОСВ.НАЛАД = 1,4*1,2*1,365*31392*2 = 143976.27 руб;
ЗОСВ.ОБЩ = 785925.5 руб.
Годовая экономия по заработной плате составляет 785925.5 руб.
6.2.2 Расчет стоимости оборудования
Стоимость оборудования, а также амортизационные отчисления на данное оборудование представлены в таблице 6.1.
6.2.3 Годовые затраты на ремонтные работы
Годовые затраты на ремонтные работы КУ (комплекса технических средств) АСУ ТП рассчитываются по формуле:
![]() ; (6.2)
; (6.2)
где kC – средний коэффициент сложности ремонтных работ для данного оборудования %;
CТКС – стоимость оборудования руб.
![]() руб.
руб.
Годовые затраты на ремонтные работы КТС составляют 8527.35 руб.
Таблица 6.1
| Наименование | Число единиц, шт | Стоимость единицы, руб. | Всего, руб. | Срок службы, лет | Норма амортизации, % | Сумма амортизационных отчислений, руб. | Потребляемая мощность, кВт | ||||||
| 2 | 3 | 4 | 5 | 6 | 7 | 8 | |||||||
| До | После | До | После | До | После | До | После | До | После | ||||
| Датчик температуры (подшипника) | 1 | 18600 | 18600 | 4 | 25 | 5115 | 0.0012 | ||||||
| Датчик температуры (масла) | 1 | 1440 | 1440 | 8 | 12.5 | 198 | 0.002 | ||||||
| Датчик температуры (двигателя) | 1 | 18600 | 18600 | 4 | 25 | 5115 | 0.0012 | ||||||
|
Контроллер(min сборка) |
1 | 1 | 120000 | 340000 | 120000 | 340000 | 18 | 5.6 | 7392 | 20944 | 0.032 | 0.03 | |
| Датчик вибрации | 1 | 1200 | 1200 | 12 | 8.3 | 109.56 | 0.0012 | ||||||
| Датчик осевого сдвига | 2 | 3000 | 6000 | 8 | 12.5 | 825 | 0.002 | ||||||
|
Датчик давления газа |
2 | 2 | 26860 | 32670 | 53720 | 65340 | 8 | 12.5 | 7386.5 | 8984.25 | 0.021 | 0.04 | |
|
Датчик перепада давления |
1 | 1 | 27340 | 35810 | 27340 | 35810 | 8 | 12.5 | 3759.25 | 4923.875 | 0.021 | 0.02 | |
|
Датчик давления воды |
1 | 8400 | 8400 | 6 | 16.7 | 1543.08 | 0.012 | ||||||
| Датчик давления масла | 1 | 1 | 7100 | 9200 | 7100 | 9200 | 8 | 12.5 | 976.25 | 1265 | 0.002 | 0.012 | |
| Датчик давления масла (резерв) | 1 | 9200 | 9200 | 8 | 12.5 | 1265 | 0.012 | ||||||
| Датчик давления воздуха | 1 | 9200 | 9200 | 8 | 12.5 | 1265 | 0.012 | ||||||
| Датчик давления обдува ЭД | 1 | 1 | 7100 | 9200 | 7100 | 9200 | 8 | 12.5 | 976.25 | 1265 | 0.002 | 0.012 | |
|
Устройство плавного пуска |
1 | 7100 | 7100 | 16 | 6.25 | 488.125 | 4.8 | ||||||
| Электромагнитная задвижка | 3 | 6 | 2200 | 2200 | 6600 | 13200 | 7.6 | 13.16 | 955.416 | 1910.932 | 18.75 | 38.4 | |
| 9 | 22 | 221860 | 552490 | 21445.66 | 55216.722 | 18.79 | 43.3 | ||||||
| Комплект ЭД | 1 | 1 | 160000 | 160000 | 18 | 5.6 | 9856 | 840 | 840 | ||||
| Комплекс маслонасосов | 1 | 2 | 18000 | 16000 | 18000 | 16000 | 12 | 8.3 | 1643.4 | 1460.8 | 360 | 382 | |
| Холодильная установка | 1 | 1 | 12000 | 12000 | 8 | 12.5 | 1650 | 240 | 240 | ||||
| ИТОГО | 3 | 4 | 190000 | 16000 | 13149.4 | 1460.8 | 1440 | 1462 | |||||
| Всего по КУ | 12 | 26 | 411860 | 568490 | 34595.06 | 56677.522 | 1458.79 | 1505.3 | |||||
6.2.4 Годовые затраты на эксплуатацию
Годовые затраты на эксплуатацию КТС (комплекса технических средств) АСУ ТП рассчитываются по формуле:
![]() ; (6.5)
; (6.5)
где ![]() - годовая заработная плата
рабочих, обслуживающих КТС АСУ ТП;
- годовая заработная плата
рабочих, обслуживающих КТС АСУ ТП;
Среднегодовая заработная плата оператора составляет 39240 руб. (3270 руб *12).
Среднегодовая заработная плата сотрудника малой группы обслуживания (МГО) составляет 83725.8 руб. (6977руб.*12)
Среднегодовая заработная плата Программиста составляет 94191.5 руб. (7849.3руб.*12)
ЗАТК = k1k2k3*Зср*NРАБ; (6.6)
ЗОПЕР = 1,4*1,2*1,365*39240*1 = 89985.168 руб;
ЗМГО = 1,4*1,2*1,365*83725.8*3 = 576000 руб;
ЗПРОГ = 1,4*1,2*1,365*94191.5*1 = 216000 руб;
ЗАТК.ОБЩ = 881985.2 руб.
![]() - годовые амортизационные отчисления, равны 56677.5
руб.;
- годовые амортизационные отчисления, равны 56677.5
руб.;
![]() - годовые затраты на ремонтные работы КТС, равны 8527.35
руб.;
- годовые затраты на ремонтные работы КТС, равны 8527.35
руб.;
![]() - годовые затраты на электроэнергию потребляемую КТС, равны 3163008.6
руб.
- годовые затраты на электроэнергию потребляемую КТС, равны 3163008.6
руб.
![]() руб.
руб.
Годовые затраты на эксплуатацию технических средств составляют 4110198.65 руб.
6.2.5 Годовые затраты на электроэнергию
Годовые затраты на электроэнергию, потребляемую КТС (комплекса технических средств) АСУ ТП, рассчитываются по формуле:
![]() ; (6.7)
; (6.7)
![]() -
максимальная мощность внедряемого комплекса, равна 1505.3 кВт;
-
максимальная мощность внедряемого комплекса, равна 1505.3 кВт;
![]() - коэффициент определяющий среднюю
потребляемую мощность, равен 0.76.
- коэффициент определяющий среднюю
потребляемую мощность, равен 0.76.
![]() - стоимость 1
кВт-ч электроэнергии, равно 0.4 руб.;
- стоимость 1
кВт-ч электроэнергии, равно 0.4 руб.;
![]() - коэффициент
берется в зависимости от количества смен работы линии, в моем случае 2 смены,
равен 1.8;
- коэффициент
берется в зависимости от количества смен работы линии, в моем случае 2 смены,
равен 1.8;
![]() - количество
рабочих часов в году, равно 3840.
- количество
рабочих часов в году, равно 3840.
![]() руб.
руб.
Годовые затраты на электроэнергию потребляемую КУ составляют 3163008.6 руб.
6.2.6 Годовые амортизационные отчисления на оборудование
Годовые амортизационные отчисления рассчитываются по формуле:
![]() ; (6.8)
; (6.8)
Рассчитаем амортизационные отчисления для датчика температуры (подшипника):
![]() руб
руб
где ![]() - средний коэффициент
амортизационных отчислений;
- средний коэффициент
амортизационных отчислений;
![]() - коэффициент, учитывающий расходы на
транспортировку, монтаж и наладку оборудования, равен 0,1;
- коэффициент, учитывающий расходы на
транспортировку, монтаж и наладку оборудования, равен 0,1;
![]() - стоимость единицы оборудования, равна 18600 руб.
- стоимость единицы оборудования, равна 18600 руб.
Аналогично рассчитываем амортизационные отчисления для каждой единицы оборудования.
Расчетные данные для всех компонентов системы, представлены в Таблице 6.1.
Годовые амортизационные отчисления равны:
![]() ;
;
Подтверждение расчетов можно проверить, исходя из следующей формулы:
![]() (6.9)
(6.9)
где n – обозначение единицы оборудования, согласно таблице 6.1
Годовые амортизационные отчисления на установленное оборудование составляют 56677.5 руб.
6.2.7 Экономический эффект за счет уменьшения количества отказов КУ
Известно, что среднее годовое время простоя Л-24/6 (установка гидроочистки моторного топлива), в связи с отказом САУ КУ традиционного типа составляет Tпрост = 52 часов. Разработанная система должна простаивать как минимум на 60% меньше. И время простоя для нее составляет менее 21 часа год. В расчетах будем использовать среднегодовую выработку КУ. Получаем дополнительное время работы КУ 31 часа в год. Это связано с большей надежностью разработанной системы управления КУ. Следовательно, зная стоимость одного руб/м3 производимого КУ аКУ = 0.034 руб/м3. И среднегодовой коэффициент загрузки станции Кз (0.8) можно посчитать экономическую выгоду от повышения надежности КУ. Рассчитаем ее по формуле:
![]() ; (6.10)
; (6.10)
где, VГОД.П2 – годовая выработка сжатого воздуха компрессорной станцией с учетом уменьшения часов простоя:
VГОД.П2 = VКС*k*t*3600 = 11*0.8*(3840 + 21)*3600 = 122316480 м3;
![]() руб.; (6.11)
руб.; (6.11)
где, VГОД = VКС*k*t*3600 = 11*0.8*3840*3600 = 121651200 м3;
VКС – производительность компрессорной станции, м3/с;
k – коэффициент неравномерности;
t - число рабочих часов установки
![]() руб.;
руб.;
Годовая экономия за счет уменьшения количества отказов составляет 3327008.3 руб.
6.2.8 Экономический эффект за счет уменьшения сроков ремонтных работ
Уменьшение трудоемкости обслуживания сокращает сроки проведения плановых ТО. При ежегодном проведении работ по обслуживанию затрачивается на 42 часов меньше времени, чем с традиционной системой управления КУ. Это связано с уменьшением числа объектов, требующих обслуживание и упрощение его проведения, а также система предотвращения вхождения КУ в аварийное состояние – предотвращение поломки и сроков проведения капитальных ремонтов.
Годовая экономия за счет уменьшения объема ремонтных работ можно рассматривать как появление дополнительного рабочего времени, при котором КУ будет вырабатывать газ. Определяется по формуле:
![]() ; (6.12)
; (6.12)
где, Кз – коэффициент средней годовой загрузки КУ 0.8;
VГОД.П1 – годовая выработка сжатого воздуха компрессорной станцией с учетом сокращения сроков ремонтных работ, м3.
VГОД.П1 = VКС*k*t*3600 = 11*0.8*(3840 + 42)*3600 = 122981760 м3;
![]() руб.;
руб.;
Экономия за счет сокращения сроков технического обслуживания КУ составляет 3345103.9 рублей в год.
6.2.9 Прочая экономия
Уменьшение затрат на обучение персонала, сокращение числа обслуживаемых элементов и другие положительные эффекты являются менее значимыми на уровне описанной выше экономии от увеличения продолжительности рабочего времени, однако они так же проявляются.
6.2.10 Годовая экономия от внедрения АТК
В общем случае с учетом всех перечисленных выше факторов годовая экономия от внедрения АТК рассчитывается по формуле:
Эг = Эп1 + Эп2 + Зосв - СГАТК; (6.13)
Эг = 3345103.9 + 3327008.3 + 785925.5 - 4110198.65 = 3347839.05 руб.
Годовая экономия составляет 3347839.05 руб.
6.2.11 Годовой экономический эффект
Годовой экономический эффект от внедрения автоматизации определяется по формуле:
![]() ; (6.14)
; (6.14)
где ![]() - нормативный коэффициент экономической эффективности капитальных
вложений для вычислительной техники обратный по отношению к сроку окупаемости (
- нормативный коэффициент экономической эффективности капитальных
вложений для вычислительной техники обратный по отношению к сроку окупаемости (![]() ). В условиях рыночной
экономики, по мере ускорения научно-технического прогресса, нормативные сроки
окупаемости, при производстве электронно-вычислительной техники последовательно
снижаются – 4; 3; 2,5 и 2 года. Это вызвано быстрым старением компьютеров,
поэтому для различных отраслей промышленности
). В условиях рыночной
экономики, по мере ускорения научно-технического прогресса, нормативные сроки
окупаемости, при производстве электронно-вычислительной техники последовательно
снижаются – 4; 3; 2,5 и 2 года. Это вызвано быстрым старением компьютеров,
поэтому для различных отраслей промышленности ![]() =0.33.
=0.33.
![]() - капитальные вложения на проектирование и внедрение
АСУ ТП, приобретение КТС, проектирование и внедрение специальных технических
средств и т.д., равны 1045739 руб.
- капитальные вложения на проектирование и внедрение
АСУ ТП, приобретение КТС, проектирование и внедрение специальных технических
средств и т.д., равны 1045739 руб.
![]() руб.
руб.
Годовой экономический эффект составляет 3080427.18 руб.
6.2.12 Капитальные затраты на разработку и ввод в эксплуатацию АСУТП
Капитальные затраты на разработку и ввод в действие АСУ ТП рассчитываются по формуле:
![]() ; (6.15)
; (6.15)
где ![]() - стоимость всех работ по разработке проекта и внедрению АСУ ТП (по
договору), равна 150000 руб;
- стоимость всех работ по разработке проекта и внедрению АСУ ТП (по
договору), равна 150000 руб;
![]() - стоимость разработки специального (прикладного) математического
обеспечения (СМО) для управления технологическим процессом, равна 35000 руб.
(по договору);
- стоимость разработки специального (прикладного) математического
обеспечения (СМО) для управления технологическим процессом, равна 35000 руб.
(по договору);
![]() руб.
руб.
Капитальные затраты на разработку и ввод в эксплуатацию АСУ ТП составляют 810339 руб.
6.2.13 Срок окупаемости капитальных вложений
Применительно к проекту АТК для дискретных производств, т.е. требующих больших трудовых ресурсов, срок окупаемости капитальных вложений рассчитывается по формуле:
![]() ; (6.16)
; (6.16)
![]() - годовая экономия, равна 3347839 руб.
- годовая экономия, равна 3347839 руб.
![]()
Срок окупаемости капитальных вложений составляет менее 0.242 года.
6.2.14 Сводная таблица основных параметров
В таблице 6.2 приведены основные параметры, изменившиеся после внедрения новой системы управления.
Таблица 6.2
Технико-экономические показатели внедрения АС
| Показатели |
Ед. Изм. |
Значение показателя |
Экономия (-) Увеличение (+) |
|
| До автоматизации | После автоматизации | |||
| Годовая программа перекачиваемого газа |
м3 |
119655360 | 121651200 | + 1995840 |
| Численность работников в т.ч.: | Чел. | 8 | 5 | -3 |
| Оператор | 2 | 1 | -1 | |
| Работник КиПа | 2 | 0 | -2 | |
| Электронщик | 2 | 0 | -2 | |
| Наладчик | 2 | 0 | -2 | |
| Малая группа обеспечения (МГО) | 0 | 3 | +3 | |
| Программист | 0 | 1 | +1 | |
|
Годовая заработная плата персонала |
Тыс. руб. | 875.9 | 881.9 | + 6. |
| Потребление электроэнергии | кВт. | 1458.79 | 1505.3 | + 46.51 |
|
Простой Л-24/6 в связи с аварией КУ |
Час | 40 | 16 | - 24 |
| Годовая экономия | Тыс. руб. | -- | 3347.8 | + 3347.8 |
| Годовой экономический эффект | Тыс. руб. | -- | 3080.4 | +3080.4 |
| Дополнительные капитало вложения | Тыс. руб. | -- | 810.3 | +810.3 |
| Срок окупаемости | Лет | -- | 0.242 | -- |
Вывод
Из данного расчета и проведенного анализа технико-экономических показателей делаем вывод о целесообразности внедрения «Автоматизированной системы управления компрессорной установкой». Так как в результате годовая экономия затрат от автоматизации системы составляет 3347839.05 рублей. Это достигается за счет экономии в зарплате 785925.5 руб., высвобожденных работников; увеличения объемов транспортируемого газа 1995840 м3. Годовой экономический эффект составляет 3080427.18 рублей; дополнительные капитало вложения 810339 рублей. Ожидаемый срок окупаемости 0.242 года, что ниже нормативного в 12 раз.
7. ОХРАНА ТРУДА И ОКРУЖАЮЩЕЙ СРЕДЫ
7.1 Описание объекта с точки зрения охраны труда
Предлагаемая модернизация внедряется в САУ КУ, которые расположены на установки гидроочистки моторного топлива (Л-24/6).
Вредными и опасными физическими производственными факторами, характерными для данного объекта являются:
- повышенная загазованность воздуха, высокий уровень шума и вибраций, взрывоопасность среды, интенсивное электромагнитное поле промышленной частоты, электрошок.
Рабочие и служащие для защиты от воздействия опасных и вредных производственных факторов обеспечены спецодеждой, спецобувью и предохранительными приспособлениями.
7.2 Разработка требований безопасности труда для обслуживающего персонала
Эксплуатация электрооборудования должна производится в соответствии с требованиями "Правил устройства и безопасной эксплуатации компрессорных установок".
Персонал, занятый обслуживанием электрооборудования системы управления КУ, а также её наладкой и ремонтом, обязан:
- иметь допуск к обслуживанию электроустановок до 1000 В;
- знать действующие правила технической эксплуатации и безопасности обслуживания электроустановок промышленных предприятий;
- руководствоваться указаниями мер безопасности настоящего руководства;
- знать принцип работы электрооборудования и работу его системы автоматического управления.
Запрещается работать под напряжением без специального инструмента и спецодежды. При необходимости, работая под напряжением, следует пользоваться инструментом с диэлектрическими рукоятками, резиновыми ковриками и спецобувью, соблюдая максимальную осторожность.
При ремонте и перерывах в работе вводный выключатель должен быть обязательно отключен и заперт в отключенном состоянии замком.
Необходимо помнить, что при отключенном вводном выключателе его верхние зажимы и вводные клеммы находятся под напряжением питающей сети.
Запрещается работа при неисправности электрической цепи дистанционного отключения вводного выключателя от кнопки "Аварийный стоп".
Для предупреждения о наличии напряжения в станции управления установлено светосигнальное устройство.
Запрещается нарушать противопожарный режим, производственную и трудовую дисциплину: курение, проведение ремонтных работ с нарушениями требований пожарной безопасности и т. д.
Во избежание нарушений противопожарного режима весь персонал, обслуживающий объект, при зачислении на работу, а также при переводе на работу по другой, новой, профессии должен пройти инструктаж по мерам пожарной безопасности и в последующем на взрывопожароопасных объектах подготовку по пожарно-техническому минимуму.
Анализ опасности электроустановок
Все случаи поражения человека током в результате эл. удара, т.е. прохождение тока через человека, являются следствием его прикосновения не менее чем к двум точкам эл. цепи, между которыми существует некоторое напряжение. Опасность такого напряжения оценивается током, проходящим через тело человека IП; или напряжением прикосновения UПР.
Зависит от ряда факторов:
- схемы включения человека в эл. сеть;
- напряжение эл. сети;
- схема самой сети;
- режима ее нейтрали;
- степени изоляции токоведущих частей от земли;
- емкости токоведущих частей относительно земли.
Схемы включения человека в цепь тока могут быть различными. Однако наиболее характерны две схемы включения человека между двумя фазами эл. сети и между одной фазой и землей.
Двухфазное прикосновение, как правило, более опасно, поскольку к телу человека прикладывается наибольшее в данной сети напряжение – линейное, а ток, проходящий через человека, оказываясь независимым от схемы сети, режима ее нейтрали и др. факторов, имеет наибольшее значение
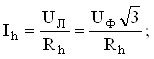 (7.1)
(7.1)
где Rh – сопротивление тела человека.
Случаи двухфазного прикосновения происходят очень редко. Они являются, как правило результатом работы под напряжением в установках до 1000 В – на щитах, сборках, ВЛ эл. передач, применение несправных средств индивидуальной защиты и т.п.
Однофазное прикосновение менее опасно, чем двух фазное, поскольку ток, проходящий через человека, ограничивается влиянием многих факторов. Однако однофазное прикосновение возникает во много раз чаще. Поэтому нужно уделять очень большое внимание мерам предосторожности при работе с эл. установками.
Прикосновения к заземленному проводу нередко считают безопасным, полагая, что напряжение этого провода относительно земли незначительно. В действительности это не всегда так. При прикосновении к заземленному проводу человек оказывается под воздействием напряжения UПР, равного потере U в заземленном проводе на участке от места его заземления и до места касания
UПР=IПГ*rab (7.2)
где IПГ – ток касания;
rab – сопротивление провода на участке «ab».
В нормативных условиях UПР не велико, наибольшее его значение соответствует прикосновению человека к сети и составляет не более 5% от напряжения сети U (поскольку сечения проводов выбираются из условия потери напряжения не более 10%).
Стекание тока в землю происходит только через проводник, находящийся с ней в непосредственном контакте. Причинами стекания тока в землю является замыкание токоведущих частей на заземленный корпус эл. оборудования, падение провода на землю, использование земли в качестве провода и т.п. Во всех случаях происходит резкое снижение потенциала заземлившейся токоведущей части до значения, равного произведению тока, стекающего в землю IЗ, на сопротивление, которое этот ток встречает на своем пути, т.е. сопротивление заземлителя растекания тока к.з.
![]() (7.3)
(7.3)
Это явление, весьма благоприятное по условиям безопасности, используют как меру защиты от поражения током, при случайном появлении напряжения на металлических токоведущих частях, которые с этой целью заземляют.
Мероприятия по обеспечению безопасности электроустановок:
Электрооборудование, токоведущие части и ограждения выбираются с ПУЭ. Для ограждения токоведущих частей в практике предусматриваются сетчатые и сплошные ограждения 1,7 м.
В сетях выше 1кВ осуществляется постоянный и переходный контроль за состоянием изоляции.
Для цеховых установок применяют следующие защитные мероприятия от поражения человека эл. током
1. Обеспечение недоступности токоведущих частей электроустановки
(шкафы, оградительные сооружения и т.п.)
2. Защитное заземление. (ГОСТ 12.1.019-79.ССБТ)
3. Зануление. (ГОСТ 12.1.030-81.ССБТ)
4. Защитное отключение. (ГОСТ 12.1.030-81.ССБТ)
5. Применение малых напряжений
Провода, питающие эл. приемник, располагаются в трубах, во избежании случайных повреждений.
В местах постоянного присутствия дежурного персонала для оказания первой помощи пострадавшим должны иметься: аптечка, развешены плакаты о правилах оказания первой помощи, о технике безопасности при работе на эл. установках.
Осмотр и ремонт РУ, ВЛ и КЛ проводится оперативным персоналом, с обязательным выполнением технических и организационных мероприятий.
К техническим мероприятиям относятся:
- Производственная необходимость отключения и принятия мер, препятствующих подаче напряжения к месту работы, вследствие ошибочного или самопроизвольного включения коммутирующей аппаратуры
- Вывешивание плакатов – предупреждений
- Заземление и проверка отсутствия напряжения
- Ограждение и сигнализация
Организационные мероприятия:
- Оформление работы нарядом.
- Допуск к работе.
- Надзор во время работы.
- Окончание работы.
Основной и легко исполняемой мерой защиты является зануление – преднамеренное электрическое соединение металлических нетоковедущих частей электроустановки, могущих оказаться под напряжением. Назначение зануления - устранение опасности поражения током в случае прикосновения к корпусу электроустановки и другим металлическим нетоковедущим частям, оказавшимся под напряжением относительно земли вследствие замыкания на корпус и по другим причинам (ГОСТ 12.1.030-35. ССБТ).
Принцип действия зануления - превращение замыкания на корпус в однофазное короткое замыкание с целью вызвать ток, способный обеспечить срабатывание защиты и, тем самым, автоматически отключить поврежденную электроустановку от питающей сети. Кроме того, поскольку зануленные корпуса заземлены через нулевой защитный проводник, то в аварийный период проявляется защитное свойство этого заземления - снижение напряжения корпусов относительно земли. Схема зануления многодвигательной установки представлена на рис. 7.1
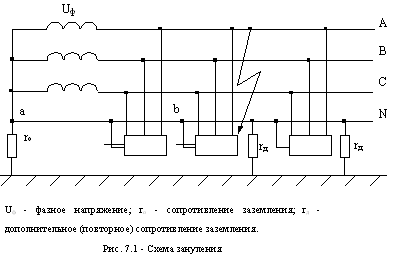
Для того, чтобы снизить опасные потенциалы при замыкании на корпус, используются повторные заземлители с сопротивлением заземлителя не более 10 Ом.
Питание подводится алюминиевым проводом сечением 25 мм, а роль нулевого проводника выполняет стальная полоса сечением 50 мм.
При использовании зануления регулятора частоты двигателя должны быть выполнены следующие условия [16]:
Iкз = k*Iном , (7.4)
где - коэффициент кратности номинального тока Iном (А) плавкой вставки предохранителя, k=3.
Номинальным током плавкой вставки Iном называется ток, значение которого указано непосредственно на вставке заводом-изготовителем. Номинальный ток Iном в помещении 40 А. Значение Iкз зависит от фазного напряжения сети и сопротивления цепи, в том числе от полного сопротивления трансформатора Zт, фазного проводника Zф, нулевого защитного проводника Zнз, внешнего индуктивного сопротивления петли "фазный провод - нулевой защитный провод" (петли "фаза-нуль") Xп, активного сопротивления заземлений нейтрали обмоток трансформатора Rо и повторного заземления нулевого защитного проводника Rп. Поскольку Rо и Rп, как правило, велики по сравнению с другими сопротивлениями, ими можно пренебречь.
Выражение для Iкз будет иметь вид:
Iкз = Uф/(Zт/3 + Zп), (7.5)
где Zп = Zф + Zнз + Xп - комплексное полное сопротивление петли "фаза-нуль".
Удельное сопротивление фазного провода:
p = 0,028 (Ом*мм![]() )/м , Sсеч = 25 мм
)/м , Sсеч = 25 мм![]() ,
,
отсюда сопротивление фазного провода:
rф = р * (Lф / Sф) = 0,028 * 300 / 25 = 0,336 Ом.
Удельное сопротивление нулевого провода:
p = 0,058 (Ом*мм![]() )/м , Sсеч = 50 (мм
)/м , Sсеч = 50 (мм![]() ),
),
отсюда сопротивление нулевого провода:
Rнз = p * (L / S) = 0,058 * 300 / 50 = 0,348(Ом).
Значения Xф и Xнз малы, ими можно пренебречь.
Значение Xп можно определить по формуле:
Xп = 0,145*lg(dср/k![]() * dф) (7.6)
* dф) (7.6)
где k = 0,3894,
dср - расстояние между проводниками,
dф - геометрический диаметр.
Расчеты дают значение Xп = 0,556 Ом.
Сопротивление электрической дуги берем равной
rд = 0,02 (Ом), Xд = 0.
В соответствии с мощностью трансформатора
rт = 0,0044 (Ом), Xт = 0,0127 (Ом)
Полное сопротивление петли "фаза-нуль":
![]() (7.7)
(7.7)
Zп = 0,716 (Ом).
При использовании зануления по требованиям ПУЭ (правила устройства электроустановок):
Rнз/Rф = 0,348/0,336 < 2 , следовательно ПУЭ выполняется.
Iкз = Uф/(Zт/3+Zп) = 220/(0,013+0,716) = 301,6 А.
При попадании фазы на зануленный корпус электроустановки должно произойти автоматическое отключение.
Iкз > k*Iном
301,6 > 3*40 = 120
Защитное зануление выполнено правильно, следовательно, отключающая способность системы обеспечена.
Определим напряжение прикосновения и ток через человека до срабатывания защиты:
Uпр = Iкзh * Rh
 (7.8)
(7.8)
Схема замещения представлена на рис.7.2
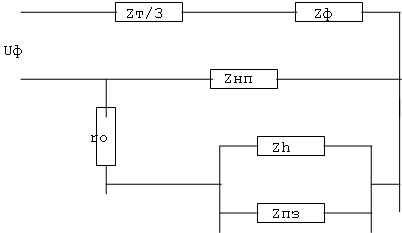
Рис.7.2 - Схема замещения
Rпз = 0,348 (Ом), Rнп = 10 (Ом), Rо = 4 (Ом)
Rh = 1 (кОм)
Uпр = 29,9 (В)
Такое напряжение безопасно для человека при времени воздействия:
tдоп<=50/Ihрасч (7.9)
Iрасч =Uпр/Rh = 29.9/1000=29.9 (мА)
Предельно допустимое время пребывания человека под действием электрического тока:
tдоп <= 50/29,9 = 1,67 (с)
В качестве прибора защитного отключения можно выбрать автоматический выключатель, расчитанный на Iном = 40 А и tср = 0,3 (с) при Iкз = 301 (А).
Tср = tср* Iном/Iкз = 0,11 (с).
Это должно обеспечить надежную защиту, при этом должно выполняться:
K = Iкз/Iном >= 1,4
K = 301/40 = 7,5 >> 1,4
7.3 Мероприятия по производственной санитарии и гигиене труда
В подсистему обеспечения санитарных условий труда (СанПиН 2.2.2.540-96) входят следующие мероприятия:
- Обеспечение нормального микроклимата.
- Чистота воздуха рабочей зоны.
- Защита от электромагнитных полей.
- Защита от шума и вибрации.
Нормирование параметров микроклимата
Нормы допустимых температур, относительной влажности и скорости движения воздуха в рабочей зоне, (СН 251-71) таблица 7.1.
Таблица 7.1
Допустимые параметры микроклимата
| Сезон |
Категория работ |
Температура воздуха, 0С |
Относительная влажность, % |
Скорость воздуха, м.с |
| Холодный |
Легкая-1а Легкая-1б Средней тяжести-IIа Средней тяжести-Iб Тяжелая III |
20-25 19-24 17-23 15-22 13-21 |
70 |
0.1 0.1-02 0.1-0.3 0.2-0.4 0.2-0.4 |
| Теплый |
Легкая-1а Легкая-1б Средней тяжести-IIа Средней тяжести-Iб Тяжелая III |
21-28 20-28 18-27 16-27 15-26 |
55-при 28 0С 60-при 27 0С 65-при 26 0С 70-при 25 0С и ниже |
0.1-02 0.1-0.3 0.1-0.4 0.2-0.5 0.2-0.5 |
Поддержание на заданном уровне параметров, определяющих микроклимат, осуществляется с помощью кондиционирования и вентиляции.
Защита от вредных веществ осуществляется мероприятиями, которые в ряде случаев следует применять комплексно. Основные из них:
- совершенствование конструкций оборудования, при которых исключаются или резко уменьшаются вредные выделения в окружающую среду, что, возможно, например, при герметизации;
- применение газо-пылеулавливающего оборудования.
Защита от вредных газовыделений предусматривает устройство местной вытяжной вентиляции для отсоса газов. Местные отсосы следует по возможности устраивать конструктивно встроенными и сблокированными с оборудованием так, что агрегат нельзя пустить в ход при выключенном отсосе.
В дополнение к общим защитным средствам применяются индивидуальные средства защиты. Для защиты органов дыхания применяют промышленные противогазы и респираторы.
7.4 Мероприятия по устранению шумов и вибраций
Основные параметры шума (ГОСТ 12.1.003-83.ССБТ):
конструкторских
бюро
71
рабочие места
и рабочие зоны
99
Одним из методов уменьшения шума на объектах энергетического производства является снижение или ослабление шума в его источниках - в электрических машинах и трансформаторах, компрессорах, вентиляторах и др.
В машинах часто причиной недопустимого шума является износ подшипников, неточная сборка деталей при ремонтах и т. п. Поэтому в процессе эксплуатации всех видов машин необходимо выполнять соответствующие Правила технической эксплуатации. Ненормальный повышенный шум, создаваемый трансформаторами и электрическими машинами, часто бывает по причине неплотного стягивания пакетов стального сердечника, а в электродвигателях - при их перегрузке или работе при обрыве одного фазного провода в питающей цепи. Своевременное устранение этих причин позволяет снизить уровень шума.
Строительные нормы и правила предусматривают защиту от шума строительно-акустическими методами. При этом для снижения уровня шума предусматриваются следующие меры:
а) звукоизоляция ограждающих конструкций; уплотнение по периметру притворов окон, ворот, дверей; звукоизоляция мест пересечения ограждающих конструкций инженерными коммуникациями; устройство звукоизолированных кабин наблюдения и дистанционного управления; укрытия; кожухи;
б) звукопоглощающие конструкции и экраны;
в) глушители шума, звукопоглощающие облицовки в газовоздушных трактах вентиляционных систем с механическим побуждением и систем кондиционирования воздуха, а также газодинамических установок.
В качестве индивидуальных средств защиты от шума используют специальные наушники, вкладыши в ушную раковину, противошумные каски, защитное действие которых основано на изоляции и поглощении звука.
Одним из эффективных средств защиты от вибрации рабочих мест, оборудования и строительных конструкций является виброизоляция, представляющая собой упругие элементы, размещенные между вибрирующей машиной и основанием. Для виброизоляции электродвигателей применяют пружинные амортизаторы. Для уменьшения вибрации кожухов, ограждений и других деталей, выполненных из стальных листов, применяют вибропоглощение - нанесение на вибрирующую поверхность резины, пластиков, вибропоглощающих покрытий достигается также значительное снижение уровня производственного шума.
В качестве индивидуальной зашиты от вибраций, передаваемых человеку через ноги, рекомендуется носить обувь на войлочной или толстой резиновой подошве. Для защиты рук рекомендуются виброгасящие перчатки.
7.5 Меры по устранению вредного воздействия электромагнитного поля
Источником электромагнитных полей являются установки для индуктивной термообработки металлов, высоковольтные ЛЭП, ОРУ, конденсаторы, трансформаторы. Нормы уровней электрических полей приведены в ГОСТ 12.1.002-84.ССБТ.
Допустимая продолжительность
пребывания человека в течении суток в электрическом поле, мин
Примечание: Нормативы по п. 2, 3, 4, 5 действительны при условии:
Применение средств индивидуальной защиты. Одними из средств защиты от электромагнитного поля являются экранирующие устройства, которые в зависимости от их конструкции и размеров, а также от места и условий размещения могут служить индивидуальными или коллективными средствами защиты людей от воздействия электрического поля при работах в действующих электроустановках промышленной частоты сверхвысокого напряжения. Экранирующие устройства обеспечивают снижение напряженности электрического поля в защищаемом пространстве до значения менее 5 кВ/м. Они в зависимости от их назначения и исполнения подразделяются на стационарные и переносные.
Стационарные экранирующие устройства являются неотъемлемой частью конструкции электроустановки и предназначены для защиты персонала при эксплутационных работах (осмотрах оборудования, оперативных переключениях, выполнении обязанностей наблюдающего за производством работ), а также при выполнении текущих и капитальных ремонтов выключателей и некоторых других работ. Они изготовляются из металла в виде плоских щитов - козырьков, навесов и перегородок.
Переносные экранирующие устройства предназначены для защиты персонал, выполняющего в течение длительного времени эксплутационные, ремонтные или монтажные работы на участках действующей электроустановки, не защищенных стационарными экранами. Они изготовляются в виде переносных или передвижных козырьков, навесов, перегородок, щитов, палаток и подобных им устройств из тех же материалов, что и стационарные экраны.
Заземление экранирующих устройств является исключительно важным для создания защитной зоны, поэтому оно должно выполняться особенно надежно. Каждый экран заземляется посредством присоединения его не менее чем в двух точках к контуру заземления электроустановки или к заземленным металлическим конструкциям.
7.6 Мероприятия по предотвращению электрошока
В электроустановках напряжением до 1000 В применение изолированных проводов уже обеспечивает достаточную защиту от напряжения при прикосновении к ним. Изолированные провода находящиеся под напряжением выше 1000 В, не менее опасны, чем неизолированные, так как повреждения изоляции обычно остаются незамеченными, если провод подвешен на изоляторах.
Чтобы исключить возможность прикосновения или опасного приближения к изолированным токоведущим частям, необходимо обеспечить их недоступность посредством ограждения, блокировок и расположения токоведущих частей на недоступной высоте или в недоступном месте. Расположение токоведущих частей на недоступной высоте или в недоступном месте позволяет обеспечить безопасность без ограждений. При этом следует учитывать возможность случайного прикосновения к токоведущим частям посредством длинных предметов, которые человек может держать в руках. Если к токоведущим частям, расположенным на высоте, возможно прикосновение с мест, редко посещаемых людьми (крыш, площадок и т. п.), в этих местах должны быть установлены ограждения или приняты другие меры безопасности.
7.7 Обеспечение пожаробезопасности
6. авария компрессорного узла;
7. перегрузки и неисправность изоляции.
7.8 Влияние компрессорных установок на окружающею среду
В связи с тем, что работа компрессорной станции связана с выделением значительного количества газообразных веществ, она оказывает большее влияние на атмосферу по сравнению с воздействием на гидросферу и почву. Учитывая это, для снижения техногенного воздействия объекта предлагается ряд мероприятий по снижению выбросов загрязняющих веществ в атмосферу. Перевод газоперекачивающих агрегатов на плавный пуск, например, позволяет уменьшить потери газа на 1,5-2,0 %.
Одним из методов уменьшения потерь газа является утилизация вторичных энергоресурсов, которые используются для теплоснабжения самой компрессорной станции и внешних потребителей: жилых поселков и теплично-овощных комбинатов. Тепло выхлопных газов газоперекачивающих аппаратов может применяться для подогрева воды или генерации пара. В этом случае содержание вредных веществ снижают методом каталитического восстановления газами-восстановителями. Возможно использование вторичных энергоресурсов компрессорной станции для подогрева воды в бассейнах и прудах рыбоводных хозяйств.
Для решения вопросов эффективности экологического контроля и управления, соблюдения природоохранных норм и правил необходимо руководствоваться «Положением об оценке воздействия намечаемой хозяйственной и иной деятельности на окружающую среду в Российской Федерации», принятое в мае 2000 года.
7.9 Мероприятия, проводимые на компрессорной станции в области охраны окружающей природной среды и рационального природопользования
1. Рассмотреть возможность модернизации или замены существующего технологического оборудования компрессорной станции на более современное для снижения выбросов газообразных веществ в атмосферу.
2. Разработать меры по снижению потерь природного газа при залповых выбросах, в частности рассмотреть возможность его утилизации.
3. Регулярно проводить анализ сточных вод перед сбросом их на поля фильтрации.
4. Регулярно проводить наблюдения за качеством ливневоталых сточных вод, а также вод р.
5. Рассмотреть возможность строительства малогабаритных очистных сооружений сточных вод, включающих песколовку и симбиотенк, и замены полей подземной фильтрации на биологические пруды с высшей водной растительностью, для создания технического водооборота
6. Регулярно проводить отбор и анализ проб почв для строгого контроля за их состоянием. Особое внимание обратить на участки, занятые огородами в непосредственной близости от компрессорной станции.
ЗАКЛЮЧЕНИЕ
В результате работы над проектом был проведен анализ компрессорной установки, как объекта автоматизации. Выбрана наиболее подходящая концепция разработки системы управления. Реализована логическая модель, графики функционирования которой подтверждают правильность выбранных управляющих алгоритмов. Разработан макет системы управления, на основе структурно-информационной модели поведения объекта.
Проведен подбор необходимых для реализации системы аппаратных средств и разработан принцип функционирования управляющей среды.
Выполнен экономический анализ эффективности создания и внедрения системы, который показал, что ее внедрение выгодно и обосновано. В виду того, что данная САУ обладает хорошей окупаемостью и экономичностью.
Проведен анализ опасных факторов воздействия на человеческий организм при эксплуатации компрессорных установок, и разработан комплекс мер по охране труда.
На основании чего, можно сказать, что внедрение системы управления позволит повысить эффективность функционирования комплекса гидроочистки за счет оптимального режима работы компрессорной установки, повышения производительности оборудования и оперативности управления технологическим процессом, снижения потребления энергоресурсов, а также снизить аварийность и увеличить срок службы оборудования, уменьшить влияние человеческого фактора в производственном процессе и, одновременно, повысить культуру производства.
Создание системы позволит сделать ее без ограничений по интеграции с другими существующими или вновь создаваемыми системами и при необходимости без значительных затрат наращивать количество выполняемых функций и каналов обработки сигналов.
Библиографический список
1. Чириков К.Ю., Мельник П.В. Использование СПГ в народном хозяйстве. //Сер. ХМ-6. - М.: ЦИНТИ химнефтемаш. - 1991.
2. Бармин И.В., Чечулин Ю.К., Купис И.Д. Сжиженный природный газ - альтернативный энергоноситель и доступное топливо. //Холодильное дело. - 1996. - №3
3. Грезин А.Г., Громов А.В., Мельникова Н.С. и др. Использование сжиженного природного газа в качестве энергоносителя - задача государственной важности. //Холодильная техника. - 1999. - №9.
4. Краковский Б.Д., Попов О.М., Удут В.Н. Выбор схемы сжижения природного газа. //Холодильная техника. - 1999. - №9.
5. V.D. Vidineev, B.A. Ivanov, N.A. Alexandrov, B.T. Marinuk. Analysis and optinuzazation of natural gas liquefaction. Ninth international conference on LNG, vol.1 of2., Nice, France, Octobre 17-20, 1989.
6. Сафин А.Х. Тенденции в технико-экономической структуре производства и развитии компрессорного оборудования. - Компрессорная техника и пневматика. 2002. №2. С.4-9.
7. Пластинин П.И. Поршневые компрессоры. Том.1. Теория и расчет / 2-е изд. переработано и доп. -М.: Колос, 2000. - 456с.
8. Захаренко С.Е., Анисимов С.А., Дмитревский В.А. и др. Поршневые компрессоры. - М.;Л. Машгиз, 1961.- 455с.
9. Гриб В.В., Сафонов Б.П., Жуков Р.В. Динамика механизма движения поршневого компрессора с учетом зазоров в подвижных соединениях. - Вестник машиностроения. 2002. №4. С.3-7.
10. Береснев В.Н. Некоторые результаты исследований виброхарактеристик поршневого компрессора // Машины и аппараты холодильной техники и кондиционирования воздуха. - Л.,1978..№3. С.164-171.
11. Видякин Ю.А., Доброклонский Е.Б., Кондратьева Т.Ф. Оппозитные компрессоры. - Л.:Машиностроение, 1979.- 279с.
12. Сергеев В.И., Юдин К.М. Исследование динамики плоских механизмов с зазорами. - М.: Наука, 1974. -111с.
13. РД 09-102-95. Методические указания по определению остаточного ресурса потенциально опасных объектов, поднадзорных Госгортехнадзору России.
ПРИЛОЖЕНИЕ А
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ БЛОКА ВВОДА\ВЫВОДА
Средства традиционного ввода-вывода (в/в) представляют собой модульную подсистему, обеспечивающую разнообразие вариантов при установке. Ее конструкция предусматривает установку поблизости от полевых устройств. Подсистема традиционного в/в оборудована ключами защиты функциональной совместимости и подключения полевых устройств, которые гарантируют, что плата в/в может быть включена только в совместимый с ней клеммный блок. Модульность, ключи защиты, поддержка принципа включи и работай делают платы традиционного ввода-вывода разумным выбором для нашей системы управления технологическим процессом.
В состав подсистемы традиционного ввода-вывода входят:
־ Несущая панель (монтируется на рейке DIN), на которую устанавливаются все компоненты, осуществляющие ввод-вывод.
־ Групповой источник питания полевых устройств с выходным напряжением 24 В.
־ Интерфейс в/в, состоящий из платы в/в и клеммного блока.
־ Различные платы аналогового и дискретного в/в, имеющие одинаковые внешний корпус и разъемы и легко устанавливающиеся на несущую панель.
־ Различные клеммные блоки, которые устанавливаются на несущую панель и к которым может быть подключена проводка до установки плат в/в.
Все платы в/в помещены в одинаковые корпуса, которые вставляются в несущую панель интерфейсов в/в. На корпусе четко указан тип содержащейся в нем платы. С помощью хорошо заметных светодиодов, расположенных в верхней части платы в/в, можно сразу видеть индикацию подачи питания, ошибки и статуса для каждого из 8 каналов платы.
Для нашего случая производится установка:
־ Двух сегментов панели Н1 (шины FOUNDATION);
־ Двух восьмиканальных плат аналогового ввода с поддержкой HART протокола;
־ Блок последовательного интерфейса (четыре порта);
־ Два резервируемых контроллера;
־ Системный транзитный и группой источники питания;
־ Коммутационные средства (общая длина 400 м);
Общие внешние условия для всех интерфейсов в/в:
Температура хранения: от - 40 до 85 °C (от – 40 до 185 °F);
Рабочая температура: от 0 до 60 °C (от 32 до 140 °F)
Относительная влажность: от 5 до 95% , без конденсации;
Загрязнение воздуха:
־ ISA-S71.04-1985, Класс G3 загрязнений воздуха;
־ Защитное покрытие;
Уровень защиты: IP 20, NEMA 12;
Сертификация для опасных зон:
־ Класс 1, Раздел 2, Группы A, B,C, D; T4;
־ СENELEC Зона 2 IIC T4;
Ударная нагрузка: ½ синусоиды 10 g в течение 11 мс;
Вибрация:
־ Вибрация с полным размахом 1 мм для частот от 5 до 16 Гц;
־ 0,5 g для частот от 16 до 150 Гц;
Размеры:
־ Высота 10,7 см (4,2 дюйма);
־ Ширина 4,1 см (1,6 дюйма);
־ Толщина 10,5 см (4,1 дюйма).
Для тех полевых устройств, которые расположены во взрывобезопасных зонах, или для дискретных полевых устройств, которым требуется больший ток, чем максимальный выдерживаемый платой, предоставляется групповой клеммный блок с 10, 16 или 24-контактамидля соединения с ромежуточными панелями. Низкоуровневые сигналы проводятся по ленточному кабелю 0,093 мм2 (28 по AWG . Американскому сортаменту проводов) или круглому измерительному кабелю. Для полевых устройств, требующих внешнего питания, может поставляться клеммный блок в/в, предназначенный для 4-проводных устройств. Такой клеммный блок в/в используется вместе с платой аналогового ввода 4-20 мА.
ПРИЛОЖЕНИЕ В
ОСНОВНОЙ ПЕРЕЧЕНЬ ЭЛЕМЕНТОВ СКОМПИЛИРОВАННОГО КОДА МОДЕЛИ RATIONAL ROSE
// Copyright (C) 1991 - 1999 Rational Software Corporation
#include "stdafx.h"
#include "P_Sensor.h"
#include "T_Sensor.h"
#include "Main_Controller.h"
//##ModelId=4479BF1400C5
Main_Controller::Alarm_mode()
// Copyright (C) 1991 - 1999 Rational Software Corporation
#if defined (_MSC_VER) && (_MSC_VER >= 1000)
#pragma once
#endif
#ifndef _INC_MAIN_CONTROLLER_4479B91902AE_INCLUDED
#define _INC_MAIN_CONTROLLER_4479B91902AE_INCLUDED
class P_Sensor;
class T_Sensor;
//##ModelId=4479B91902AE
class Main_Controller
public:
//##ModelId=4479BF1400C5
Alarm_mode();
private:
//##ModelId=4479B92B019C
int m_P_Out_norm;
//##ModelId=4479B949004A
int m_T_Moto_Dop;
//##ModelId=4479B96603E6
int m_T_bearing_Dop;
#endif /* _INC_MAIN_CONTROLLER_4479B91902AE_INCLUDED */
// Copyright (C) 1991 - 1999 Rational Software Corporation
#include "stdafx.h"
#include "Valve.h"
#include "Frequency_Device.h"
#include "Receiver.h"
#include "Pump.h"
#include "Air_compressor.h"
#include "Sensor.h"
#include "Alarm_Controller.h"
// Copyright (C) 1991 - 1999 Rational Software Corporation
#if defined (_MSC_VER) && (_MSC_VER >= 1000)
#pragma once
#endif
#ifndef _INC_ALARM_CONTROLLER_427F52EB009B_INCLUDED
#define _INC_ALARM_CONTROLLER_427F52EB009B_INCLUDED
class Valve;
class Frequency_Device;
class Receiver;
class Pump;
class Air_compressor;
class Sensor;
//##ModelId=427F52EB009B
class Alarm_Controller
private:
//##ModelId=428263E300EA
double m_P_gas_In_min;
//##ModelId=4479A7500063
double m_P_gas_In_max;
//##ModelId=4479ADD803CE
double m_P_gas_Out_min;
//##ModelId=4479ADFE00A8
double m_P_gas_Out_max;
//##ModelId=4479AF7C0183
double m_P_gas_Difference_max;
//##ModelId=4479A6E00365
double m_T_gas_Out_max;
//##ModelId=4479ABFF00DF
double m_T_gas_In_max;
//##ModelId=428263F60128
double m_Freq_max;
//##ModelId=446DECFF03D5
double m_C_max;
//##ModelId=446DED1402EF
double m_Virb_max;
//##ModelId=4479AB90000D
double m_T_bearing_max;
//##ModelId=4479AEA500BC
double m_T_moto_max;
//##ModelId=4479ABEC0073
double m_T_oil_max;
//##ModelId=4479AF0903D7
double m_P_Oil_max;
//##ModelId=4479AF2C0034
double m_P_Oil_Reserve_max;
//##ModelId=4479A7280033
double m_T_max;
//##ModelId=4479A99602A4
int m_T_time;
//##ModelId=4479AA2903E6
int m_P_time;
//##ModelId=4479AA4203BA
int m_C_time;
//##ModelId=4479AA55032B
int m_Vibr_time;
//##ModelId=4479B003026E
double m_P_water_max;
//##ModelId=4479B03E0088
double m_P_water_min;
//##ModelId=4479B023030A
double m_P_air_max;
//##ModelId=4479B06F03A9
double m_P_air_min;
#endif /* _INC_ALARM_CONTROLLER_427F52EB009B_INCLUDED *
// Copyright (C) 1991 - 1999 Rational Software Corporation
#include "stdafx.h"
#include "Air_compressor.h"
//##ModelId=4479A1A5002A
Air_compressor::Start()
//##ModelId=4479A1AB0155
Air_compressor::Stop()
// Copyright (C) 1991 - 1999 Rational Software Corporation
#if defined (_MSC_VER) && (_MSC_VER >= 1000)
#pragma once
#endif
#ifndef _INC_AIR_COMPRESSOR_4479A19702A1_INCLUDED
#define _INC_AIR_COMPRESSOR_4479A19702A1_INCLUDED
//##ModelId=4479A19702A1
class Air_compressor
private:
//##ModelId=4479A43A0161
bool State;
public:
//##ModelId=4479A1A5002A
Start();
//##ModelId=4479A1AB0155
Stop();
#endif /* _INC_AIR_COMPRESSOR_4479A19702A1_INCLUDED */
// Copyright (C) 1991 - 1999 Rational Software Corporation
#include "stdafx.h"
#include "Pump.h"
//##ModelId=4479A29E0032
Pump::Start()
//##ModelId=4479A2A7039C
Pump::Stop()
// Copyright (C) 1991 - 1999 Rational Software Corporation
#if defined (_MSC_VER) && (_MSC_VER >= 1000)
#pragma once
#endif
#ifndef _INC_PUMP_4479A25903A4_INCLUDED
#define _INC_PUMP_4479A25903A4_INCLUDED
//##ModelId=4479A25903A4
class Pump
protected:
//##ModelId=4479A3F20031
bool State;
public:
//##ModelId=4479A29E0032
Start();
//##ModelId=4479A2A7039C
Stop();
#endif /* _INC_PUMP_4479A25903A4_INCLUDED */
// Copyright (C) 1991 - 1999 Rational Software Corporation
#include "stdafx.h"
#include "Moto.h"
//##ModelId=42826F9400DA
Moto::Start()
//##ModelId=42826F9D035B
Moto::Stop()
// Copyright (C) 1991 - 1999 Rational Software Corporation
#if defined (_MSC_VER) && (_MSC_VER >= 1000)
#pragma once
#endif
#ifndef _INC_MOTO_42826E470119_INCLUDED
#define _INC_MOTO_42826E470119_INCLUDED
//##ModelId=42826E470119
class Moto
private:
//##ModelId=4479A3D10232
bool State;
public:
//##ModelId=42826F9400DA
Start();
//##ModelId=42826F9D035B
Stop();
#endif /* _INC_MOTO_42826E470119_INCLUDED */
// Copyright (C) 1991 - 1999 Rational Software Corporation
#include "stdafx.h"
#include "Moto.h"
#include "Frequency_Device.h"
//##ModelId=446DE32902E4
Frequency_Device::Up_Freq()
//##ModelId=446DE3380304
Frequency_Device::Down_Freq()
// Copyright (C) 1991 - 1999 Rational Software Corporation
#if defined (_MSC_VER) && (_MSC_VER >= 1000)
#pragma once
#endif
#ifndef _INC_FREQUENCY_DEVICE_446DE26B00F6_INCLUDED
#define _INC_FREQUENCY_DEVICE_446DE26B00F6_INCLUDED
class Moto;
//##ModelId=446DE26B00F6
class Frequency_Device
public:
//##ModelId=446DE32902E4
Up_Freq();
//##ModelId=446DE3380304
Down_Freq();
private:
//##ModelId=446DE34800D6
double m_Freq;
#endif /* _INC_FREQUENCY_DEVICE_446DE26B00F6_INCLUDED */
// Copyright (C) 1991 - 1999 Rational Software Corporation
#include "stdafx.h"
#include "Sensor.h"
//##ModelId=42825D010138
Sensor::Get_Param()
// Copyright (C) 1991 - 1999 Rational Software Corporation
#if defined (_MSC_VER) && (_MSC_VER >= 1000)
#pragma once
#endif
#ifndef _INC_SENSOR_427F542002AE_INCLUDED
#define _INC_SENSOR_427F542002AE_INCLUDED
//##ModelId=427F542002AE
class Sensor
public:
//##ModelId=42825D010138
Get_Param();
protected:
//##ModelId=42825D2201E4
double Param;};
#endif /* _INC_SENSOR_427F542002AE_INCLUDED */
// Copyright (C) 1991 - 1999 Rational Software Corporation
#include "stdafx.h"
#include "Valve.h"
//##ModelId=4281C29C00DA
Valve::Arrange(int percent)
// Copyright (C) 1991 - 1999 Rational Software Corporation
#if defined (_MSC_VER) && (_MSC_VER >= 1000)
#pragma once
#endif
#ifndef _INC_VALVE_427F56A8000F_INCLUDED
#define _INC_VALVE_427F56A8000F_INCLUDED
//##ModelId=427F56A8000F
class Valve
public:
//##ModelId=4281C29C00DA
Arrange(int percent);
private:
//##ModelId=4479A3E60265
int State;
#endif /* _INC_VALVE_427F56A8000F_INCLUDED */
| Интеллектуальные датчики | |
|
Введение Одной из наиболее важных проблем, возникающих при создании и эксплуатации судовых технических систем, является обеспечение требуемого ... В ИД осуществляется дистанционное формирование или модификация пользователем основных настроечных параметров датчики: установка нуля прибора, выбор заданного диапазона измерения ... Датчики давления, датчики состава газа, датчики скорости потока и расхода газа |
Раздел: Рефераты по коммуникации и связи Тип: дипломная работа |
| Совершенствование метрологического обеспечения измерений в ... | |
|
Введение Историческое развитие науки, техники, промышленного производства показало немало моментов, когда метрология становилась действенным ... Рекомендуется заменить прибор А511 (каналы измерения температуры ТВД, ТНД, масла до и после охлаждения, воздуха на входе осевого компрессора), прибор А542 (каналы измерения ... Обвязочные газопроводы, находящиеся на территории и в цехах компрессорной станции, характеризуются высокими давлениями транспортируемого газа, как в самих газопроводах, так и в ... |
Раздел: Промышленность, производство Тип: дипломная работа |
| Универсальная система управления маслонапорной установкой ... | |
|
СОДЕРЖАНИЕ Реферат Список используемых сокращений Введение 1. Описание конструкции и функционирования маслонапорной установки ГЭС 1.1 Краткое описание ... Основные установки управления передаются контроллеру МНУ контроллером ГЭС непосредственно при запуске системы управления маслонапорной установкой, что позволяет каждый раз ... Затем последовательно производится опрос датчиков системы, перед пуском в ручную необходимо было накачать до номинального давления масло в гидроаккумулятор и скорректировать его ... |
Раздел: Промышленность, производство Тип: дипломная работа |
| Характеристика основных факторов и методов мотивации персонала, и ... | |
|
Содержание Введение 1. Технико-экономическое обоснование метода производства полиэтилена низкого давления (ПНД) 1.1 Патентный поиск 1.2 Описание ... Для охлаждения циркуляционного газа на линии нагнетания компрессора поз.10 предусмотрен воздушный холодильник поз.4, имеющий шесть вентиляторов: три на стороне входа газа, три на ... Этилен используется как на наружной установке так и в помещении компрессорной, поэтому необходимо рассчитать категорию компрессорной и наружной установки. |
Раздел: Рефераты по менеджменту Тип: курсовая работа |
| ... и метрологического обеспечения при транспортировке природного газа | |
|
... ПРЕДПРИЯТИЯ 1.1 МЕТРОЛОГИЧЕСКОЕ ОБЕСПЕЧЕНИЕ 1.2 НАЗНАЧЕНИЕ И ЗАДАЧИ МЕТРОЛОГИЧЕСКОЙ СЛУЖБЫ 2. ИЗМЕРЕНИЕ ПАРАМЕТРОВ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА 2.1 ... Рекомендуется заменить прибор А511 (каналы измерения температуры ТВД, ТНД, масла до и после охлаждения, воздуха на входе осевого компрессора), прибор А542 (каналы измерения ... Обвязочные газопроводы, находящиеся на территории и в цехах компрессорной станции, характеризуются высокими давлениями транспортируемого газа, как в самих газопроводах, так и в ... |
Раздел: Промышленность, производство Тип: дипломная работа |