Дипломная работа: Автоматизированный привод станка-качалки на ОАО "Татнефть"
1. Технико-технологическая часть
1.1 Общие сведения об ОАО "Татнефть"
Общие сведения: ОАО "Татнефть" – одна из крупнейших в нефтегазовом комплексе России. Основная деятельность компании "Татнефть" осуществляется на территории Российской Федерации.
ОАО "Татнефть" является холдинговой структурой, в состав которой входят нефтегазодобывающие управления, нефтегазоперерабатывающие, нефтехимические предприятия, а также предприятия и сервисные производства, реализующие нефть, продукты нефтегазо – переработки и нефтехимии.
Ежегодный объем добычи нефти Компанией составляет более 25 миллионов тонн, газа – более 700 млн. куб. м.
ОАО "Татнефть" в настоящее время предоставлены лицензии на разработку 77 месторождений в Республике Татарстан, где сосредоточены основные запасы нефти республики.
Одним из основных приоритетов Компании является охрана окружающей среды и обеспечение поизводственной и промышленной безопасности. Важнейшей составляющей деятельности Компании "Татнефть" является совершенствование и разработка новых методов нефтедобычи. Развитие прогрессивных наукоемких технологий, а также увеличение объемов и видов предоставляемых высокотехнологичных производственных услуг укрепляет инновационный потенциал Компании и обеспечивает одно из значимых конкурентных преимуществ ОАО "Татнефть" в отрасли.
1.2 Применение контроллеров частоты при нефтедобыче
Целью данной работы является анализ внедрения контроллеров частоты различных видов с тем чтобы автоматизировать процесс нефтедобычи и сократить потребление электроэнергии в нефтегазодобывающих управлениях ОАО "Татнефть".
|
|
Если раньше технические средства позволяли лишь периодически проводить измерения технологических параметров на скважинах операторами при помощи переносных комплектов оборудования, то стационарно установленные на месторождениях современные микропроцессорные контроллеры делают возможным непрерывный автоматический их контроль. Применительно к скважинам, эксплуатируемым штанговыми глубинными насосами, это означает измерение таких технологических параметров, как динамограмма (зависимость усилия на полированном штоке от перемещения точки подвеса штанг), динамический уровень, ваттметрограмма (зависимость потребляемой мощности от перемещения точки подвеса штанг), влияние газового фактора, давление на устье скважины, суточная производительность скважины и других. При этом функции управления должны обеспечивать дистанционное включение и отключение приводного электродвигателя, аварийное отключение установки, периодический режим эксплуатации, плавное регулирование скорости вращения при помощи преобразователя частоты.
К настоящему времени известен целый ряд разработчиков и производителей контроллеров и станций управления для установок ШГН. Среди зарубежных фирм это "Lufkin Automation" (США), "eProduction Solutions" (США), "ABB" (США), "Automation Electronics" (США), "DrSCADA Automation" (США), "R&M Energy Systems" (США), "International Automation Resources" (США) и " SPOC Automation" (США). Известны также отечественные разработчики, среди которых можно выделить НПФ "Экос" (Уфа), НПФ "Интек" (Уфа), ГУПНН "Авитрон-Ойл" (Уфа), НПО "Интротест" (Екатеринбург), НПФ "Интеграл +" (Казань), "Шатл" (Казань), ЗАО "Линт" (Казань), ООО "Аякс" (Ульяновск) и других.
Использование современных интеллектуальных контроллеров обеспечивает решение таких задач, как автоматизация работы станка-качалки, оптимизация режимов работы оборудования, оперативное выявление аварийных ситуаций и несоответствия режимов эксплуатации оборудования, оперативная передача информации о состоянии объекта на пульт оператора по системе телемеханики.
Системы телемеханики на сегодняшний день строятся, как правило, с использованием радиоканала. Поэтому типичная станция управления включает в себя контроллер, силовой коммутатор для включения и отключения электродвигателя, радиомодем и набор датчиков технологических параметров. Отдельные станции управления имеют в своем составе преобразователи частоты для регулирования скорости вращения электродвигателя.
Ниже делается попытка рассмотреть функциональные возможности этих контроллеров и сопоставить их характеристики.
1.3 Зарубежные контроллеры ШГН
Разработкой систем автоматизации для нефтедобывающей промышленности и контроллеров ШГН в частности занимаются такие зарубежных фирмы как "Lufkin Automation" (США), "eProduction Solutions" (США), "ABB" (США), "Automation Electronics" (США), "DrSCADA Automation" (США), "R&M Energy Systems" (США), "International Automation Resources" (США) и " SPOC Automation" (США).
Контроллер SAM Well Manager фирмы Lufkin является на сегодняшний день самым распространенным во всем мире. Контроллер предусматривает подключение аналоговых датчиков усилия и положения, а также дискретных датчиков положения, расположенных на валу электродвигателя и выходном валу редуктора. Данные с этих датчиков используются для контроля и управления работой насосной установки и для визуального отображения графических данных на жидкокристаллическом дисплее или на экране портативного компьютера в легком для понимания формате.
Контроллер SAM Well Manager по формируемой динамограмме определяет степень заполнения жидкостью ствола скважины. Если анализ покажет, что скважина опустошена, то насос отключается и скважина переводится в режим накопления. В этом режиме она снова заполняется жидкостью, после чего блок управления включает двигатель насоса и начинает откачку.
Программное обеспечение контроллера SAM Well Manager обеспечивает обнаружение по динамограмме отдельных неисправностей в насосной установке. Непосредственно на скважине могут быть просмотрены "архивные" данные в виде диаграмм и отчетов на встроенном дисплее.
Контроллер SAM Well Manager предусматривает возможность работы с двумя конфигурациями датчиков динамометрирования:
1) датчик усилия располагается на штоке над верхней траверсой (датчик типа Loadtrol), датчик положения, работающий на эффекте Холла, устанавливается на выходном валу редуктора;
2) датчик деформации балансира совмещен с датчиком угла наклона балансира.
Контроллер предусматривает 3 режима работы:
1) все включения и отключения электродвигателя производятся по командам с диспетчерского пункта;
2) включения и отключения электродвигателя производятся по заданным временным уставкам (периодическая эксплуатация);
3) управление осуществляется автоматически по результатам анализа динамограмм.
Контроллер имеет аналоговый выход для подключения частотного преобразователя для плавной регулировки скорости вращения электродвигателя.
В настоящее время данные контроллеры устанавливаются в станции управления "СКАД", выпускаемые АЦБПО ЭПУ ОАО "Татнефть".
Недостатком данной системы является высокая стоимость. Так, например, стоимость только контроллера фирмы "Lufkin" (США) в комплекте с датчиками динамометрирования соизмерима с ценой целой станции управления в полной комплектации отечественного производства.
Фирма "eProduction Solutions" (США) предлагает сразу целый ряд контроллеров для установки на скважинах ШГН. Это контроллеры CAC2000, CAC8800, ePIC, ePAC и iBEAM.
Функциональные возможности первых трех контроллеров аналогичны SAM Well Manager фирмы Lufkin. Предусматривается подключение пассивных датчиков усилия, расположенных на штоке (датчик типа Loadtrol) или на балансире, а также датчиков параметров движения штока нескольких типов: датчиков Холла, расположенных на валу кривошипа, датчиков угла наклона балансира и потенциометрических датчиков угла. Измерение сигналов с аналоговых датчиков производится 12-разрядным АЦП с частотой 20 Гц. Возможно осуществление калибровки датчиков непосредственно на скважине. Имеются клавиатура и графический дисплей для просмотра данных (рисунок 2). Определяется степень сбалансированности противовесов насосной установки. В отличие от предыдущих изделий ePAC представляет собой целую систему регулируемого электропривода для насосной установки. Он позволяет варьировать в широких пределах скорость качаний насоса, а также раздельно оптимизировать время хода плунжера вверх и вниз. Наиболее оригинальной разработкой фирмы является устанавливаемый на балансире станка-качалки контроллер iBEAM. Он укрепляется с помощью струбцины на балансире, на его верхней поверхности расположена солнечная батарея, обеспечивающая автономную работу устройства. Для работы в ночное время имеется встроенная аккумуляторная батарея. Непосредственно рядом с контроллером устанавливаются совмещенные датчики деформации и угла наклона балансира. Измеренные динамограммы передаются с помощью маломощного радиопередатчика на приемный терминал, расположенный возле блока управления электродвигателем.
В данной системе полностью исключаются подвижные кабели от датчиков и кабели подвода питания, а соответственно повышается надежность и долговечность. В настоящее время контроллером iBEAM оснащено около 25 тысяч скважин во всем мире.
В некоторых случаях бывает целесообразно обслуживать одним контроллером целый куст близкорасположенных скважин. Эта возможность реализована в контроллере фирмы "International Automation Resources" (США). Но применение пассивных аналоговых датчиков усилия ограничивает длину соединительных кабелей несколькими десятками метров. Поэтому для подключения удаленных датчиков применяются специальные преобразователи выходных сигналов пассивных датчиков в токовый сигнал 4-20 мА. Однако даже токовый аналоговый сигнал подвержен воздействию электромагнитных помех, и использование датчиков с цифровым выходом было бы в этом случае более целесообразным.
Контроллер AEPOC 2100 фирмы "Automation Electronics" (США) отличается от остальных высокой разрешающей способностью АЦП. Для оцифровки сигналов с датчиков усилия и перемещения используется 16-разрядное АЦП. При этом в качестве датчика перемещения могут использоваться датчики начала хода, потенциометры, "жидкостные" и "сухие" инклинометры. Гибкий алгоритм определения срыва подачи позволяет работать с горизонтальными и сильнозагазованными скважинами.
Мировой лидер в производстве силовой электроники компания "ABB" (США) выпустила контроллер ALC 600. Контроллер предусматривает подключение датчиков усилия и положения и рассчитан на совместную работу с преобразователем частоты. Выпускается 12 вариантов станций управления с этим контроллером для электродвигателей мощностью от 6 до 100 кВА. Для работы в условиях холодного климата в шкафу предусмотрена система подогрева.
Таблица 1.1 Характеристики импортных контроллеров ШГН
| SAM, Lufkin | CAC2000,eps | iBEAM,eps | IAR | AEPOC2100 | ALC600,ABB | |
| Тип датчика усилия |
Loadtrol ДДБ |
Loadtrol ДДБ |
ДДБ | Loadtrol |
Loadtrol ДДБ |
Loadtrol |
| Тип датчиков положения |
ДХ ДУН |
ДХ ДУН ПДУ |
ДУН | ДУН |
ДХ ДУН ПДУ |
ДХ |
| Контроль ваттметрограмм | - | - | - | - | - | - |
|
Управление преобразователем частоты |
+ | + | + | - | - | + |
| Возможность обслуживания нескольких скважин | - | - | - | + | - | - |
| Наличие дисплея и аппаратуры | + | + | + | + | + | - |
|
Интерфейсы RS-232 RS-485 Ethernet |
+ + - |
+ + - |
+ - - |
+ - - |
+ + + |
|
| Разрядность АЦП | 12 | 12 | 12 | 12 | 16 | - |
| Диапазон рабочих температур, гр. С | -40…+85 | -40….+85 | -30…+80 | -40…+70 | -40…+70 | -50… +50 |
ДДБ* – Датчик деформации балансира
ДХ** - Датчик Холла, устанавливаемый на выходном валу редуктора
ДУН*** - Датчик угла наклона балансира
ПДУ**** - Потенциометрический датчик угла
Характеристики импортных контроллеров ШГН приведены в таблице 1.1.
1.4 Отечественные контроллеры ШГН
Рассмотрим функциональные возможности контроллеров управления ШГН отечественной разработки. В данный обзор не вошли некоторые уже морально устаревшие контроллеры, а также контроллеры, не получившие широкого распространения и оставшиеся опытными образцами.
Станция управления "Интел-СУС" (ЗАО "Линт", Казань), в комплекте с контроллером "Телебит" и датчиками динамометрирования ДДС – 04 имеет практически аналогичные импортным системам функциональные возможности и представляет собой законченное изделие. Система комплектуется программным обеспечением на всех уровнях.
Помимо датчиков динамометрирования к контроллеру подключаются датчики ваттметрирования для контроля энергетических параметров: токов и напряжений по каждой фазе, активной и реактивной мощности, коэффициента мощности, проведения технического учета электроэнергии и построения ваттметрограмм.
Широкое применение на промыслах Татарии получили контроллеры "Мега" (НПФ "Интек", Уфа). Настоящие котроллеры работают как с датчиками динамометрирования собственной разработки, так и с ДДС-04.
Функционально контроллер аналогичен описанным выше, система комплектуется собственным программным обеспечением. Часть скважин не оборудована датчиками положения, определение начала хода штока производится путем математического анализа графика изменения усилия.
Контроллер телемеханики скважины КTC.1 (НПО "Интротест", Екатеринбург). Контроллер телемеханики скважины предназначен для телемеханизации посредством радиоканала отдельно стоящих нефтедобывающих скважин, расположенных в радиусе до 6 км от кустовых площадок. При этом кустовой контроллер системы телемеханики будет являться управляющим контроллером.
Контроллер телемеханики скважины состоит из трех блоков:
1) микроконтроллер А812-01;
2) радиомодем "Невод - 5";
3) блок питания БП24В/20W/DIN.
Контроллер комплектуется антенной диапазона 433 МГц, тип которой выбирается в зависимости от условий применения.
К контроллеру подключается динамограф СДА-10-ШГН производства НПО "Интротест", устанавливаемый между траверсами канатной подвески и имеющий форму замкнутого кольца. Выходные сигналы динамографа по каналам измерения усилия и ускорения заводится в контроллер как аналоговые токовые сигналы 4-20 мА.
Следует отметить, что используемый в контроллере микропроцессор ADuC812 на сегодняшний день морально устарел, и его мощность не позволяет в достаточной степени реализовать на месте какие-либо функции анализа режима работы и управления ШГН.
Определенных успехов достигли и разработчики контроллера "Орион" ("Аякс", Ульяновск). Указанные контроллеры на сегодняшний день наиболее приспособлены для совместной работы с элементами системы ДДС-04 в плане сбора и представления информации. Формирование массива динамограммы происходит непосредственно в самом датчике динамографа, контроллеру нужно лишь периодически считывать массив из памяти датчика по цифровому протоколу "Modbus-RTU". В датчике реализована функция сравнения динамограмм, и если форма динамограммы не изменилась, передача массива не требуется, что освобождает каналы связи.
Программное обеспечение системы телемеханики позволяет отправлять измеренные динамограммы и рассчитанные данные по дебиту в корпоративную систему "Армитс", охватывающую все нефтегазодобывающие предприятия ОАО "Татнефть".
Примером законченной отечественной системы автоматизации установки ШГН является станция управления АСУС-02 НПФ "Экос". Автоматизированная станция АСУС-02 имеет силовую часть, специализированный контроллер, выполненный на 16-ти разрядном RISC-процессоре, и радиостанцию, обеспечивающую связь с диспетчерским пунктом.
Отличительной особенностью станции управления АСУС-02 является то, что в ней реализовано ваттметрирование с отлаженным алгоритмом определения таких характеристик как: перегрузка по току, отклонение напряжения от нормы, перекос фаз, отклонение частоты питающего напряжения, коэффициента гармоник, коэффициента мощности, обрыв и проскальзывание ремней, биение в редукторе, разбаланс противовесов, и других. Станция укомплектовывается также элементами систем динамометрирования ДДС-04. Возможность станции управления АСУС-02 совмещать функции ваттметрирования и динамометрирования является важным достоинством, поскольку повышает достоверность диагностики режима работы установки и выявления неисправностей.
Кроме перечисленных выше, станция управления АСУС-02 обладает следующими возможностями:
- точная автоматизированная балансировка станка-качалки;
- подсчет потребленной электроэнергии;
- определение производительности скважинной установки по динамограмме;
- оценка динамики изменения дебита скважины;
- часовой (за последние 24 часа) и суточный (за последние 30 суток) архивы дебита;
- автоматическое управление откачкой в периодическом режиме;
- программируемая задержка автоматического включения при пропадании напряжения в сети;
- автоматическое выключение при аварийных ситуациях;
-построение динамограмм расчетным и экспериментальным способами;
- графики изменения во времени параметров (тренды);
- отчеты текущего состояния и последнего аварийного отключения;
- интеграция в SCADA-системы.
Дополнительно в станцию может быть установлен контроллер расширения с 16 цифровыми и 8 аналоговыми входами, что позваляет подключать к станции дополнительную измерительную, исследовательскую, контрольную аппаратуру скважины и других обьектов и передавать всю эту информацию на диспетчерский пункт. В станцию управления может устанавливаться программируемая панель отображения с графическим жидкокристаллическим индикатором (320х240 точек) и 18-ти кнопочной клавиатурой. Обмен данными и загрузка специализированного программного обеспечения происходит через порт RS-485 по протоколу MODBUS.
В таблице делается сравнение характеристик отечественных контроллеров ШГН. По итогам сравнения можно сделать следующие выводы:
1. Большинство отечественных контроллеров работают с цифровыми датчиками динамометрирования ДДС-04 производства НПП "Грант".
2. Во многих системах предусмотрен контроль ваттметрограмм.
3. Практически все контроллеры не поддерживают управление частотным преобразователем.
4. В отечественных контроллерах отсутствуют встроенные средства ввода/вывода информации непосредственно на скважине – дисплеи и клавиатуры.
Табл. 1.2 Характеристики отечественных контроллеров ШГН
| "Телебит", Линт, Казань | "Мега", Интек, Уфа | "Орион", Аякс, Ульяновск | "ТК166", Экос, Уфа | Сатурн, Авиатрон, Уфа | |
| Тип датчиков усилия | ДДС-04 |
ДДС-04 ДПНТ20 |
ДДС-04 | ДДС-04 | Авиатрон |
| Тип датчиков положения | ДП-04 |
ДП-04 ДУН |
ДП-04 | ДП-04 | Геркон |
| Контроль ваттметрограмм | + | + | - | + | + |
| Управление преобразователем частоты | - | - | - | - | - |
| Наличие дисплея и клавиатуры | - | - | - | - | - |
|
Интерфейсы RS-232 RS-485 Ethernet |
+ + - |
+ + - |
+ + - |
+ + - |
+ + + |
| Разрядность АЦП | 12 | 12 | 12 | 10 | - |
| Диапазон рабочих температур | -40…+70 | -40…+60 | -40…+60 | -40…+60 | -40…+60 |
ДДС-04* – Датчик усилия ДДС-04 производства НПП "Грант".
ДП-04** – Датчик положения ДП-04 производства НПП "Грант", используется датчик Холла, устанавливаемый на выходном валу редуктора, фиксирует нижнюю и верхнюю мертвые точки.
ДУН*** - Датчик угла наклона балансира.
Сравнивая зарубежные и отечественные системы автоматизации ШГН можно заключить:
1. Выполняемые функции анализа динамограмм зарубежных и отечественных систем аналогичны, отличаются лишь алгоритмы их реализации.
2. В импортных системах используются пассивные датчики усилия. Практически все отечественные контроллеры работают с современными датчиками, имеющими цифровой либо токовый выходной сигнал.
3. В большинстве отечественных систем помимо динамометрирования производится еще контроль электрических параметров – ваттметрирование, тогда как в зарубежные контроллерах (например, фирмы Lufkin) эта функция, как правило, отсутствует.
4. В зарубежных контроллерах в большинстве случаев есть средства ввода и отображения информации непосредственно на объекте –графические дисплеи с клавиатурой. В отечественных разработках для настройки предусматривается подключение ноутбука (в станции управления АСУС-02 возможна установка специальной панели отображения информации).
5. В зарубежных контроллерах предусмотрена функция управления частотным регулятором - есть соответствующий выходной сигнал и заложены необходимые алгоритмы управления. Из отечественных разработчиков только фирма "Шатл" имеет опыт управления частотнорегулируемым электроприводом цепной установки. Очевидно, это объясняется тем, что в настоящее время стоимость частотных регуляторов является слишком высокой для массового оснащения ими всего фонда скважин.
6. Стоимость импортных систем существенно выше, чем стоимость отечественных разработок. Кроме того, при использовании отечественных станций управления все проблемы с ремонтом и модернизацией оборудования будут решаться значительно быстрее.
1.5 Отличительные особенности цепного привода от станка качалки
Начало внедрения цепного привода в процесс добычи нефти был начат в 2003 году. Тогда это было сделано лишь в экспериментальных целях. На практике цепной привод показал очень хорошие результаты и одним из этих результатов было снижение энергозатрат на подъём продукции из пласта. В среднем это снижение составляло 10-50%. Вот наглядные данные по преимуществу цепного привода от балансирного станка-качалки:
Таблица 1.3 Сравнение ОПНШ и ПЦ
| Наименование параметров | Величины параметров | |
|
ОПНШ-30 скв. 26529 |
ПЦ-60-18-3-0,5/2,5, скв. 38190 | |
|
Дебит, м3 /сут Мощность электродвигателя, кВт Суточное потребление электроэнергии, кВт*ч Удельные энергозатраты на подъём продукции, кВт*ч/ м3*км Сокращение удельных энергозатрат, % |
7,5 5,5 27,4 24,6 0 |
9,1 2,2 22,2 14,6 41 |
Установлено, что на многих скважинах, эксплуатируемых цепными приводами, возможно снижение мощности электродвигателя с 5,5 до 3 и 2 кВт. Результаты замеров при мощности электродвигателей приводов 5,5 и 2,2 кВт в сравнении со станком-качалкой ОПНШ-30.
Результаты на лицо : даже обычный цепной привод гораздо экономичней станка-качалки. Но не стоит на этом останавливаться – применение датчиков, контроллеров и прочих микропроцессорных средств выведет процесс нефтедобычи на ещё более экономичный уровень.
1.6 "Альметьевнефть": от испытаний до массового внедрения
Внедрение контроллеров фирмы Lufkin является новым крупным проектом ОАО "Татнефть". С импортным оборудованием для контроля добычи в "Татнефти" знакомы еще с середины девяностых, когда проведенные испытания в нефтегазодобывающем управлении "Альметьевнефть" показали эффективность применения контроллеров Baker и DeltaX. Но цены на новое оборудование, согласно проведенным расчетам, тогда сочли слишком высокими для массового внедрения. В то же время, первые попытки выхода на рынок делали и российские производители, компания "Линт" (Казань) и "Интек" (Уфа), имелись разработки и у Fisher Rosemount. Последняя является подразделением компании Emerson Process Management, осуществляющей сборку некоторых продуктов в Челябинске на заводе Мetran, также входящем в состав Emerson. В поиске оптимального решения "Татнефть" провела не один год, пока в 2004 году специалисты производственного управления ОАО "Татнефть" во время посещения летней ежегодной нефтегазовой выставки в Москве не заглянули на стенд компании Lufkin. Сотрудники Lufkin подробно рассказали о результатах применения контроллеров в "Белоруснефти" (см. НГЕ №8, 2006, стр. 16-27) и провели предварительные расчеты. Так с 2005 года контроллер SAM Well Manager, продукт нового поколения компании Lufkin, появился в "Татнефти". От своего предшественника, применяемого в Беларуси, он отличается более широкими возможностями в оптимизации работы скважин.
Немного дороже, намного надежнее
Проведенные в 2007 году испытания первой партии из десяти контроллеров, восемь из которых попали на промыслы "Альметьевнефти", продемонстрировали хорошие результаты, высокие потребительские качества и надежность в эксплуатации. Новый контроллер Lufkin не только передает всю информацию на клиентские места специалистов, но и производит полный ее анализ и управление скважиной по заданным критериям.
У контроллера возможности большие, подтверждают специалисты "Альметьевнефти", перечисляя при этом главные: позволяет оптимизировать эксплуатационные параметры системы "нефтяной пласт – насос", обеспечивает контроль производительности скважины, проводит диагностику оборудования, осуществляет непрерывный контроль состояния глубинно-насосного и поверхностного оборудования.
Работа контроллера основана на математической обработке показаний всего лишь трех датчиков: положения, числа оборотов и нагрузки, которые устанавливаются на кривошип, вал электродвигателя и полированный шток. Причем обработка производится мощным процессором контроллера автономно, непосредственно на скважине.
С 2006 года в систему контроля автоматизированной добычи вошел программно-технический комплекс XSPOC, компании Theta Enterprises, к которому в настоящее время подключены все контроллеры. ПО XSPOC позволяет дистанционно контролировать и анализировать состояние скважины и оборудования. Сегодня специалисты компании, для которых созданы клиентские места для взаимодействия с системой, имеют возможность работать с русифицированной версией этого продукта.
Проблемы разные – решение одно
Стандартные возможности контроллера в "Альметьевнефти" используют с применением наработанного опыта и знаний. Творческий подход специалистов позволяет говорить о "ноу-хау", новых технологиях, разработанных с использованием оборудования Lufkin в качестве эффективного инструмента управления процессом добычи.
Проблема АСПО в "Татнефти" решена эксплуатацией штанг со скребками-центраторами. Однако на ряде скважин структура АСПВ имеет густую жидкую форму, поэтому механический метод борьбы бывает недостаточен. Наиболее тяжелые, часто ремонтируемые из них были оборудованы контроллерами. До внедрения контроллеров на этих скважинах проводилось до 6 профилактических обработок в год, и даже при таком количестве, они были, в основном, неэффективными, поскольку проводились несвоевременно. "Мы опаздывали с обработками, приходили, когда уже появлялась критическая масса отложений парафина. Чтобы не усугублять ситуацию, вынуждены были проводить подземные ремонты. Продолжительность межремонтного периода была низкой, – комментирует Латфуллин. – Сегодня количество профилактических обработок снижено, в среднем, до четырех в год, за счет их своевременности и высокой эффективности. В результате увеличился коэффициент эксплуатации с 0,89 до 0,96 и соответственно увеличился среднесуточный дебит".
Вот наглядный пример работы интеллектуальной скважины. На рис. 1 представлена динамика работы скважины 11 326 с ноября 2007 года по сегодняшний день, где красная кривая – количество циклов работы и накопления, а зеленая – суточная добыча. Стабильность пластового и забойного давлений по данной скважине значительно зависит от стабильности работы нагнетательных скважин. В апреле прошлого года нагнетательная скважина, которая непосредственно влияет на эту скважину, до ноября ушла в капитальный ремонт по причине аварии с глубинно-насосным оборудованием.
Пластовое давление снизилось со 140 до 100 атм., а дебит с 19 до 3 м3/сут. Наличие контроллера на данной скважине позволило обеспечить автоматический перевод работы скважины в саморегулируемый режим откачки по заданному забойному давлению, что является наиболее оптимальным вариантом, при этом количество циклов в некоторые дни доходило до 17. Как видно, за 3,5 месяца после запуска нагнетательной скважины режим работы добывающей скважины полностью восстановлен. Необходимо отметить, что данный процесс происходил без участия специалистов, рабочего персонала нефтепромысла и дополнительных гидродинамических исследований. Единственное, что было задано специалистами заранее – уставка наполнения насоса.
Контроллеры обеспечивают дополнительные возможности
В ближайшем будущем в "Альметьевнефти" контроллеры Lufkin собираются дополнительно задействовать и для контроля нефтепромыслового оборудования, в частности, для защиты эксплуатационной колонны от наружной коррозии, которая осуществляется станциями катодной защиты. Подключив станцию управления к свободному аналоговому входу контроллера Lufkin, контроль над катодной защитой можно будет осуществлять оперативно с диспетчерского пульта.
Помимо контроля над скважинами с ШГН сегодня можно говорить и о возможностях контроля работы ЭЦН, станции управления которых, подключаются к ПТК XSPOC. О состоянии трех скважин, оборудованных ЭЦН, сегодня технологи "Альметьевнефти" могут судить, получая дистанционно данные о динамике работы скважины, давлении на приеме насоса, температуре, вибрации, нагрузке и напряжении погружного электродвигателя.
На четырех площадях Ромашкинского месторождения: Альметьевской, Северо-Альметьевской, Березовской и Миннибаевской, а также на Бухарском месторождении, на девонских горизонтах и залежах высокосернистой нефти – контроллеры Lufkin повсюду продемонстрировали надежность и возможности, ограниченные только фантазией специалистов "Альметьевнефти".
Динамика работы скважины представлена на рисунке 1.1.

Рис. 1.1 Динамика работы скважины
2. Расчетно–техническая часть
2.1 Выбор и согласование параметров частотно – регулируемого асинхронного электропривода
В составе частотно-регулируемого асинхронного электропривода выбор и согласование параметров преобразователя частоты и асинхронного короткозамкнутого двигателя является главным вопросом. Для выбора двигателя и преобразователя частоты нужно учитывать следующие параметры:
- диапазон регулирования частоты вращения двигателя (для определения
числа полюсов двигателя и номинальной частоты вращения двигателя);
- нагрузочную характеристику (она определяет ограничения, связанные с охлаждением двигателя и выходом в зону ослабленного поля, т.е. на частоту вращения ротора двигателя выше его номинальной по техническим условиям на двигатель);
- требуемый крутящий момент двигателя (он требуется для определения мощности двигателя);
- тип и мощность преобразователя частоты, учитывая следующие особенности:
- управление одним двигателем или группой;
- двигатель погружной;
- двигатель взрывозащищенный;
- двигатель двухскоростной.
Выбор преобразователя частоты и двигателя для вентилятора/насоса сводится к выполнению алгоритма. Алгоритмы описываются ниже приведенными формулами. Расчет требуемого крутящего момента на валу двигателя
![]() (2.1)
(2.1)
где РН - мощность нагрузки в кВт;
N - число оборотов двигателя, об/мин;
ТН - крутящий момент на валу двигателя, (н·м) или (кгс·м).
Необходимо проверять мощность на валу с учетом момента нагрузки и условий окружающей среды. Обычно когда температура уменьшается, мощность на валу увеличивается.
2.2 Предварительный выбор двигателя/преобразователя на основе данных и расчетов
а) Выбор мощности двигателя: РДВ. > РНАГРУЗКИ, (кВт).
Мощность двигателя должна быть больше мощности нагрузки.
б) Выбор мощности преобразователя частоты.
Мощность преобразователя частоты выбирается так, чтобы номинальный ток двигателя (IДВ) был меньше или равен току на выходе преобразователя частоты (IПЧ)
Дан асинхронный двигатель (таблица 2.1) с короткозамкнутым ротором типа 4А100L4У3, с моментом статической нагрузки Мс=26,7 Н·м и моментом инерции Jрм=0,1 кг·м2. Определить параметры и составить структурную схему силовой части.
Таблица 2.1 Технические данные двигателя 4А100L4У3
|
Наименование | Размерность | Значение | |||
|
Номинальная мощность, Рном |
кВт | 4 | |||
|
Номинальное напряжение сети, U1л |
В | 380 | |||
|
Номинальная частота питающей сети, fc |
Гц | 50 | |||
|
Синхронная частота вращения, nо |
об/мин | 1500 | |||
|
Номинальное скольжение, sном |
% | 4,6 | |||
|
Скольжение критическое, sкр |
% | 31,5 | |||
|
Отношение Мпуск /Мном |
- | 2,0 |
|
|||
|
Отношение Ммин/Мном |
- | 1,6 |
|
|||
|
Отношение Мкр /Мном |
- | 2,4 |
|
|||
|
Отношение Iпуск /Iном |
- | 6,0 |
|
|||
|
Момент инерции, Jдв |
кг*м2 |
0,011 |
|
|||
|
КПД, cosφном |
% | 87 |
|
|||
|
Коэффициент мощности, cosφном |
- | 0,83 |
|
|||
Таблица 2.2 Параметры схемы замещения в относительных единицах
| Параметры |
Хμ |
В номинальном режиме | При коротком замыкании | |||||
| Статора | Ротора | |||||||
|
R1 |
X1 |
R2 |
X2 |
R2п |
Rкп |
X2 |
||
| В отн. единицах | 2,4 | 0,067 | 0,079 | 0,053 | 0,14 | 0,058 | 0,13 | 0,15 |
Номинальный фазный ток статора определяется по формуле:
![]() (2.2)
(2.2)
Значение параметров схемы замещения в именованных единицах определяются по формулам:
![]() , (2.3)
, (2.3)
![]() (2.4)
(2.4)
где x, r – сопротивление, Ом
X, R – сопротивление, отн. ед.
Результаты расчета сопротивлений в именованных единицах представлены в таблице 2.3.
Таблица 2.3 Параметры схемы замещения в именованных единицах
| Параметры |
Хμ |
В номинальном режиме | При коротком замыкании | |||||
| Статора | Ротора | |||||||
|
R1 |
X1 |
R2 |
X2 |
R2п |
Rкп |
X2 |
||
| Сопротивление в Ом | 59,28 | 1,64 | 1,95 | 1,31 | 3,46 | 1,43 | 3,21 | 3,71 |
В силовую часть электропривода входят асинхронный двигатель с короткозамкнутым ротором и комплектный преобразователь частоты.
Условием выбора преобразователя частоты является соответствие номинального напряжения и тока тиристорного преобразователя номинальным параметрам двигателя, т.е.
UТПном > U1ном, IТПном > I1ном.
Для питания двигателя выбран комплектный электропривод типа АТО4 5,5 (рисунок 2.2.1). Данный преобразователь является тиристорным электроприводом с автономным инвертором напряжения.
Параметры тиристорного преобразователя представлены в таблице 2.4.
Таблица 2.4 Данные комплектного электропривода АТО4 5,5
| Наименование | Размерность | Значение |
|
Напряжение питающей сети, Ucном |
В | 380 |
|
Частота питающей сети, fном |
Гц | 50±2% |
| Число фаз, m | - | 3 |
|
Номинальное напряжение выходное, линейное U1 |
В | 0±380, ±2% |
|
Номинальный ток, I1 |
А | 11 |
|
Выходная частота, f1 |
Гц | 0±400, ±0,05% |
|
Ток перегрузки, Iдоп |
% | 150 |
| Длительность перегрузки, t | с | 60 |
Электропривод АТО4 5,5 предназначен для высокодинамичных электроприводов механизмов с высокими требованиями к регулированию параметров при четырехквадрантном управлении.

Рис. 2.1 Комплектный электропривод АТО4 5,5
B – силовой полууправляемый выпрямитель
ФС – силовой LC-фильтр звена постоянного напряжения;
ТК – тиристорный ключ реостатного торможения (тормозной ключ);
БТР – блок тормозного резистора.
АД асинхронный электродвигатель;
ИП источник питания (конвертор);
ДН датчик напряжения;
ФИ формирователь управляющих сигналов тиристоров (драйвер);
МК микропроцессорный контроллер.
Силовой канал ВФСАИН осуществляет двухступенчатое преобразование электрической энергии выпрямление сетевого напряжения с помощью нерегулируемого выпрямителя В и последующее инвертирование выпрямленного постоянного по величине напряжения посредством автономного инвертора напряжения АИН. Алгоритм ШИМ обеспечивает взаимосвязанное регулирование частоты F и величины U выходного напряжения по заданному закону, а также формирует синусоидальную форму кривой тока приводного АД.
Для реализации режима динамического (реостатного) торможения в звено постоянного тока электропривода включён тормозной тиристорный (IGBT), ключ ТК и внешний блок тормозного резистора БТР. Датчики тока ДТ и напряжения ДН в силовом канале электропривода служат для контроля, регулирования и измерения электрических параметров электропривода, в т.ч. для защиты от токов перегрузки и короткого замыкания, недопустимых отклонений напряжения.
Многоканальный источник питания ИП преобразует сетевое переменное напряжение или выпрямленное напряжение звена постоянного тока в систему напряжений постоянного тока требуемых уровней и степени стабильности, гальванически связанных и не связанных между собой, для питания устройств управления.
Микропроцессорный контроллер МК осуществляет формирование режимов работы электропривода с заданными параметрами с помощью сигналов управления: сигналов ШИМ – управления тиристорами АИН, сигналов защиты и аварийного отключения электропривода, приёма и передачи внешних управляющих, задающих и информационных сигналов.
2.3 Расчет и выбор элементов выходного фильтра
На выходе с автономного инвертора напряжения расположен фильтр. Наиболее распространенным видом выходного фильтра является LC – фильтр. Основным требованием, предъявляемым к фильтру, является обеспечение заданного коэффициента гармоник переменного напряжения в стационарном режиме.
Индуктивность фильтра определяется по формуле:
![]() (2.5)
(2.5)
где Емакс – максимальное напряжение источника постоянного напряжения, В. В данном случае это напряжение в звене постоянного тока с учетом возможного превышения напряжения сети на 10%.
![]() (2.6)
(2.6)
fк – несущая частота, так называемая коммутации ШИМ.
В электроприводе типа АТО несущая частота меняется программно. В данном случае fк=8 кГц. Предельная частота ограничена допустимой частотой переключения тиристоров, она составляет 10 кГц. Численное значение индуктивности фильтра определится:
![]() (2.7)
(2.7)
К установке принимает реактор типа РТСТ – 20,5-2,02У3, параметры которого приведены в таблице 2.5
Таблица 2.5 Техническая характеристика реактора РТСТ – 20,5-2,02У3
| Наименование | Размерность | Значение |
|
Номинальное линейное напряжение питающей сети, Uсном |
В | 410 |
|
Номинальный фазный ток, I1ном |
А | 20,5 |
|
Номинальная индуктивность фазы, Lр |
мГн | 2,02 |
|
Активное сопротивление обмотки, Rp |
мОм | 265 |
Емкость фильтра определится по формуле:
 (2.8)
(2.8)
где Тк – период несущей частоты, с;
![]() (2.9)
(2.9)
kr – коэффициент высших гармоник; kr=0,05;
Численное значение емкости фильтра:
![]() (2.10)
(2.10)
К установке принимается конденсатор типа МБГО–1-400В–2,4мкФ±10%. Дроссели включают в каждую фазу, последовательно с асинхронным двигателем, а конденсаторы соединяют в треугольник и включают параллельно двигателю. Соответственно конденсаторы существенно не влияют на общее сопротивление статорной цепи, поэтому сопротивлением фильтра при расчетах можно пренебречь.
2.4 Расчет и выбор элементов сглаживающего фильтра
Сглаживающие дроссели устанавливаются в звене постоянного тока низковольтных агрегатов и служат для снижения переменной составляющей тока через конденсаторы фильтра и уменьшения зоны прерывистых токов при работе электропривода. Конденсатор предназначен для замыкания реактивной составляющей тока статора.
Качество фильтра определяется коэффициентом сглаживания, который определяется:
![]() (2.11)
(2.11)
где qвх – коэффициент пульсаций на входе фильтра;
qвых коэффициент пульсаций на выходе фильтра принимается в пределах 0,01…0,1; выберем qвых=0,01.
Коэффициент пульсаций на входе фильтра определяется по формуле:
![]() (2.12)
(2.12)
где n – число пульсаций выпрямителя; для трехфазной мостовой схемы n=6;
a - угол управления вентилей выпрямителя; =0, так как напряжение регулируется в АИН.
![]() (2.13)
(2.13)
Численное значение коэффициента сглаживания:
![]()
Емкость фильтра принимается из расчета 100 мкФ на 1 кВт мощности двигателя. Расчетная мощность фильтра определится:
![]() (2.14)
(2.14)
К установке выбирается конденсатор типа МБГО–1-400 В–390мкФ±10%.
Индуктивность фильтра определяется по формуле:
![]() (2.15)
(2.15)
![]() (2.16)
(2.16)
![]()
К установке принимает реактор типа ФРОС–250/0,5У3 параметры, которого представлены в таблице 2.6.
Таблица 2.6 Техническая характеристика реактора ФРОС– 250/0,5У3
| Наименование | Размерность | Значение |
|
Номинальный постоянный ток, I1ном |
А | 320 |
|
Номинальная индуктивность фазы, Lр |
мГн | 4,2 |
|
Активное сопротивление обмотки, Rp |
мОм | 11,5 |
Разработка структурной схемы силовой части.
Силовая часть электропривода состоит из преобразователя частоты и электродвигателя. Структурная схема силовой части представлена на рисунке 2.1

Рис. 2.1 Структурная схема силовой части электропривода
Динамические свойства преобразователя частоты совместно с блоками измерения и преобразования координат могут быть упрощенно учтены апериодическим звеном с передаточной функцией:
![]() (2.17)
(2.17)
где KПЧ эквивалентный передаточный коэффициент преобразователя.
![]() (2.18)
(2.18)
где Udмакс номинальное фазное напряжение на выходе преобразователя, В; Uупр макс максимальное напряжение системы управления, В.
Численное значение коэффициента передачи преобразователя частоты:
![]()
ТТЧ эквивалентная постоянная времени преобразователя, с. Она складывается из времени задержки включения ШИМ и времени, затрачиваемого процессором на преобразование и вычисление сигналов (Тпр=1 мс).
Время задержки ШИМ определится:
![]() (2.19)
(2.19)
Численное значение постоянной времени преобразователя:
![]() (2.20)
(2.20)
Электродвигатель представляется передаточными функциями электромагнитной и механической частей, представленных апериодическим и интегрирующим звеньями, соединенными последовательно.
Электромагнитная часть представляет из себя передаточную функцию от напряжения статора к току статора:
![]() (2.21)
(2.21)
где Rсуммарное сопротивление двигателя определяется по формуле:
![]() (2.22)
(2.22)
здесь Rф2 активное сопротивление выходного фильтра на выходе АИН, Ом;
R1 активное сопротивление обмотки статора, Ом;
R2 приведенное активное сопротивление обмотки ротора, Ом;
k2 коэффициент электромагнитной связи ротора.
Взаимная индуктивность асинхронного двигателя определится:
![]() (2.23)
(2.23)
Индуктивность рассеяния статора:
![]() (2.24)
(2.24)
Полная индуктивность фазы статора:
![]() (2.25)
(2.25)
Индуктивность рассеяния ротора:
![]() (2.26)
(2.26)
Полная индуктивность фазы ротора:
![]() (2.27)
(2.27)
Индуктивность рассеяния асинхронного двигателя:
 (2.28)
(2.28)
или по приближенной формуле
![]() (2.29)
(2.29)
В дальнейших расчетах L 0,0071 Гн.
Коэффициент электромагнитной связи ротора определяется по формуле:
![]() (2.30)
(2.30)
Численное значение суммарного сопротивления двигателя определится:
![]()
Электромагнитная постоянная времени асинхронного двигателя определяется по формуле:
![]() (2.31)
(2.31)
Электромагнитный момент двигателя формируется на основании уравнения:
![]() (2.32)
(2.32)
где рп число пар полюсов обмотки статора, рп=2.
Механическая часть асинхронного двигателя представляется интегрирующим звеном с передаточной функцией:
![]()
Структурная схема силовой части системы ПЧ –АД смоделирована в программе Simulink. Вид модели представлен на рисунке 2.2.

Рис. 2.2 Структурная схема электропривода в числовом виде

Рис. 2.3 Схема исследования по задающему воздействию
Момент статической нагрузки Мс=26,7 Н·м соответствует номинальному моменту двигателя, который определятся:
 (2.33)
(2.33)

Рис. 2.4Переходная характеристика по задающему воздействию
Переходная характеристика характеризует силовую часть электропривода как апериодическое звено с коэффициентом усиления K=21,9.Время переходного процесса в системе равно tпп.зад=0,415 с.

![]()
Рис. 2.5 Частотные характеристики по задающему воздействию
Частотные характеристики показывают, что система является статической, так как наклон низкочастотной части ЛАХЧ нулевой.
Система:
обладает достаточным быстродействием, частота среза ср=190 рад/с;
устойчива с запасом по фазе 59,8 и запасом по амплитуде 16,8 дБ.
Исследование влияния возмущения – статической нагрузки на силовую часть системы ПЧ – АД осуществляется в соответствии со схемой, изображенной на рисунке 2.4.6. Отличие от схемы, изображенной на рисунке 2.4.3 состоит в местах расположения контрольных точек Input и Output .
Результаты исследования системы представлены на рисунках 2.7 и 2.8.

Рис. 2.6 Схема исследования по возмущающему воздействию

Рис. 2.7 Переходная характеристика по возмущающему воздействию
Система ПЧ-АД обладает низким быстродействием (время переходного
процесса tпп.возм=0,412 с). Время переходного процесса скорости при единичном скачке задающего сигнала (tпп.зад=0,415 с) почти не отличается от времени переходного процесса при наличии возмущения. Причем низкое быстродействие системы связано с достаточно большим моментом инерции. Поэтому и коэффициент усиления в системе низкий.
![]() (2.34)
(2.34)

Рис. 2.8 Частотные характеристики по возмущающему воздействию
3. Специальная часть проекта
3.1 Особенности ПЧ основанных на IGBT-транзисторах
Преобразователь построен по принципу двухзвенного преобразования энергии с промежуточным звеном постоянного тока и автономным инвертором напряжения. Функциональная схема преобразователя представлен на рисунке 3.1.
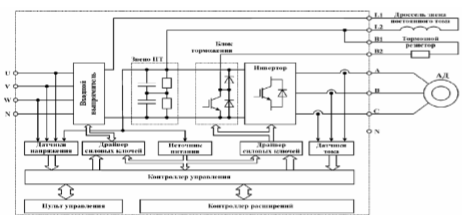
Рис. 3.1 Функциональная схема преобразователя
Силовая часть преобразователя включает в себя трехфазный мостовой выпрямитель (входной выпрямитель), звено постоянного тока (звено ПТ), трехфазный мостовой инвертор (инвертор) и блок торможения. Входной выпрямитель включает в себя цепь предварительного заряда емкостей звена постоянного тока, обеспечивающую ограничение тока заряда и плавное нарастание напряжения на конденсаторах. В преобразователях мощностью 5,5-37кВт входной выпрямитель является неуправляемым, при этом отключение звена постоянного тока преобразователя осуществляется с помощью встроенного электромагнитного реле. В преобразователях мощностью 45-90кВт входной выпрямитель является полууправляемым и выполняет функцию отключения звена постоянного тока преобразователя.
Звено постоянного тока представляет собой емкостной фильтр, служащий источником постоянного напряжения для инвертора. Для уменьшения пульсаций тока в звене постоянного тока и снижения гармонических составляющих тока как в обмотках двигателя, так и потребляемого из сети рекомендуется использование внешнего дросселя постоянного тока, подключаемого к клеммам L1 и L2 преобразователя. При отсутствии дросселя постоянного тока клеммы L1 и L2 соединяются перемычкой, поставляемой в комплекте с преобразователем.
Инвертор, построенный на IGBT-транзисторах, преобразует напряжение звена постоянного тока в переменное напряжение заданной частоты и амплитуды. Блок торможения представляет собой встроенный ключ управления внешним тормозным резистором, подключаемым к клеммам В1 и В2 преобразователя и предназначен для реализации режима динамического торможения двигателя (при необходимости реализации высоких темпов торможения).
Драйверы силовых ключей входного выпрямителя и инвертора обеспечивают управление соответственно тиристорами и затворами IGBT, формируют сигналы защит, а также осуществляют гальваническую развязку силовых и управляющих цепей. В преобразователях мощностью 5,5-37кВт драйвера силовых ключей входного выпрямителя отсутствуют.
Система датчиков преобразователя включает в себя датчики напряжения на входе и в звене постоянного тока преобразователя, датчики выходного тока, а также датчик температуры силовой части преобразователя. Источник питания обеспечивает формирование питающих напряжений, необходимых для работы преобразователя. Также имеется гальванически развязанный канал питания 24В (250мА) для питания внешних устройств, подключаемых к интерфейсному модулю. Контроллер управления управляет согласованной работой всех модулей преобразователя и реализует большинство защитных и сервисных функций. Контроллер расширений включает в себя набор средств взаимодействия с внешними управляющими устройствами. В состав контроллера расширений входят:
• 3 аналоговых выхода (4.20мА) с индивидуальной гальванической развязкой, предназначенные для мониторинга параметров электропривода. Функциональное назначение каждого выхода может быть определено пользователем.
• 2 аналоговых входа (0.20мА или 0.10В) с индивидуальной гальванической развязкой, один из которых предназначен для подключения задатчика уставки и датчика технологического параметра;
• 8 дискретных входов типа "сухой контакт" с групповой гальванической развязкой, для приема управляющих сигналов от устройств автоматики. Функциональное назначение каждого дискретного входа может быть определено пользователем.
• 3 релейных выхода (~250VAC, 3A или 30VDC, 3A), имеющие нормально замкнутые и нормально разомкнутые контакты. Функциональное назначение выходов:
- работа/останов;
- авария/нет аварии;
- включение дополнительного двигателя.
• встроенные источники питания с общей гальванической развязкой:
- 10В (50мА) для подключения потенциометра формирования сигнала задатчика технологического параметра;
- 24В (250мА) для питания датчика технологического параметра или внешних устройств пользователя.
• драйвер интерфейса RS-485 с гальванической развязкой и поддержкой протокола ModBus, предназначенный для подключения пульта дистанционного управления или внешних управляющих контроллеров. Встроенный (местный) пульт управления позволяет выполнять процедуры просмотра, редактирования параметров преобразователя, управления и контроля режимов работы электропривода.
Электромагнитная совместимость (ЭМС).
Преобразователь соответствует требованиям к помехоэмиссии по ГОСТ Р 51317.6.4 и устойчив к электромагнитным помехам по ГОСТ Р 51317.6.2.
Работа преобразователя сопровождается генерацией электрических сигналов с широким спектром частот, что может привести к появлению электромагнитных помех. Распространяться эти помехи могут как по силовым кабелям, подключенным к преобразователю, так и непосредственным излучением в окружающее пространство. Работа вентилей входного выпрямителя вызывает появление негармонического тока потребления, что может привести к ухудшению качественных показателей электрической энергии в точке подключения преобразователя к питающей сети. Это объясняется, во-первых, скачкообразным изменением параметров цепи во время коммутационных процессов в вентильной группе, во-вторых – изменением величины тока нагрузки и связанным с этим падением напряжения на индуктивном сопротивлении сети в коммутационном интервале. Работа силовых элементов преобразователя в ключевых режимах с короткими фронтами импульсов напряжения и тока с частотой следования до нескольких килогерц может сопровождаться появлением индустриальных радиопомех. Приобретенный Вами преобразователь соответствует требованиям к помехоэмиссии и устойчив к электромагнитным помехам. Однако на практике все же возможны ситуации, когда необходимо принимать дополнительные меры в целях минимизации влияния помех, генерируемых преобразователем на работу различного рода оборудования, или наоборот, защищать от помех сам преобразователь. При решении этих задач рекомендуется использовать приведенные ниже общие меры по подавлению помех:
• Не прокладывайте питающие сетевые кабели и кабели подключения двигателя параллельно друг другу или в непосредственной близости друг от друга.
• По возможности используйте экранированные силовые кабели или используйте кабели, проложенные внутри заземленной металлической трубы, которая будет служить для них экраном.
• Максимальная длина кабеля для прямого подключения двигателя к преобразователю не должна превышать 30 метров. При подключении к одному преобразователю нескольких двигателей учитывается суммарная длина кабелей.
• Корпус преобразователя и двигатель необходимо заземлять в одной точке. Для заземления необходимо использовать винты заземления, находящиеся сбоку преобразователя.
• Для линий управляющих сигналов или для подключения датчиков используйте экранированную витую пару. Экран таких кабелей должен быть обязательно заземлен.
• Установить устройство для подавления импульсных помех в оборудовании, расположенном вблизи от преобразователя.
Улучшение электромагнитной совместимости.
Для улучшения электромагнитной совместимости к преобразователю может подключаться следующее дополнительное оборудование:
• сетевой дроссель;
• входной пассивный фильтр;
• входной фильтр подавления радиопомех.
Сетевые дроссели позволяют обеспечить лучшую защиту преобразователя от сетевых перенапряжений и уменьшить гармоники тока, вырабатываемые преобразователем частоты. Использование сетевых дросселей особенно рекомендуется в следующих случаях:
• при параллельном включении нескольких преобразователей с близко расположенными соединениями;
• при наличии в сети питания значительных помех от другого оборудования;
• при асимметрии напряжения питания между фазами >1,8% номинального напряжения;
• при питании преобразователя от линии с низким полным сопротивлением (преобразователь расположен рядом с трансформаторами, в 10 и более раз более мощными, чем преобразователь);
• при установке большого количества преобразователей на одной линии;
• для уменьшения перегрузки конденсаторов, повышающих cosϕ, если установка оснащена батареей конденсаторов для повышения коэффициента мощности. Пассивный фильтр позволяет обеспечить уровень гармоник потребляемого тока меньше 16% или 10%, в зависимости от исполнения фильтра. Входной фильтр подавления радиопомех предназначен для уменьшения наведенного излучения в сети ниже пределов, установленных стандартом EN 55011, группа 1, класс A или B (2). Фильтры не могут применяться в сетях и изолированной нейтралью.
Улучшение совместимости с сетью и нагрузкой
Для улучшения совместимости преобразователя с питающей сетью и с двигателем, увеличения ресурса преобразователя и обеспечения работы в режиме динамического торможения к преобразователю может подключаться следующее дополнительное оборудование:
• дроссель звена постоянного тока;
• тормозной резистор;
• дроссель двигателя;
• выходной синусный фильтр.
Дроссель звена постоянного тока необходим для снижения пульсаций выходного тока и уменьшения гармоник тока, потребляемого из сети. Кроме того, наличие дросселя звена постоянного тока позволяет увеличить ресурс силовых конденсаторов звена постоянного тока, а, следовательно, и ресурс преобразователя в целом. Коэффициент мощности преобразователя нормируется только при использовании дросселя звена постоянного тока.
Тормозной резистор необходим для реализации режима динамического торможения, возникающего при высоких темпах торможения двигателя, особенно в случае механизмов с большим моментом инерции. Выбор параметров тормозного резистора осуществляется в соответствии с конкретными условиями работы привода. Общие рекомендации по выбору тормозного резистора приведены в таблице 3.1. Торможение с высоким темпом при отсутствии тормозного резистора или при некорректном выборе параметров тормозного резистора может привести к аварийному отключению преобразователя с кодом "Авария 05".
Дроссель двигателя позволяет:
• увеличить максимальную длину кабеля между преобразователем и двигателем до 200м;
• ограничить dV/dt до значения 500 В/мкс;
• ограничить пиковые перенапряжения на двигателе;
• отфильтровать помехи, обусловленные срабатыванием контактора,
находящегося между фильтром и двигателем;
• уменьшить ток утечки на землю двигателя.
Выходной синусный фильтр используется в случаях, требующих:
• большой длины кабелей между преобразователем и двигателем (до 1000м);
• применения промежуточного трансформатора между преобразователем и двигателем;
• параллельного включения двигателей.
Таблица 3.1 Выбор тормозного резистора

Дистанционное управление преобразователем
Управление и настройка преобразователя может производиться с использованием пульта дистанционного управления (ПДУ), представляющего собой выносной блок, подключаемый с помощью специального кабеля к каналу связи RS-485;
Полным набором функций управления и контроля обладает местный пульт.
– стандартная опция, поставка которой возможна по согласованию с изготовителем.
ПДУ используется для дистанционного управления преобразователем и позволяет производить следующие основные действия:
• запуск и останов двигателя;
• изменение значения задания поддерживаемого параметра;
• просмотр всех параметров работы преобразователя.
ПДУ подключается к преобразователю при помощи специального соединительного кабеля.
Максимальная длина соединительного кабеля – 300м. Для описания работы с пультом дистанционного управления обратитесь к соответствующему руководству по эксплуатации.
Управление преобразователем.
Способы управления и настройки.
Управление и настройка преобразователя может производиться одним из следующих способов:
• с местного пульта управления, расположенного на передней панели преобразователя;
• с пульта дистанционного управления (ПДУ), представляющего собой выносной блок, подключаемый с помощью специального кабеля к каналу связи RS-485;
• от внешней системы управления или персонального компьютера (используется канал связи RS-485).
Полным набором функций управления и контроля обладает местный пульт. ПДУ
– стандартная опция, поставка которой возможна по согласованию с изготовителем.
ПДУ используется для дистанционного управления преобразователем и позволяет производить следующие основные действия:
• запуск и останов двигателя;
• изменение значения задания поддерживаемого параметра;
• просмотр всех параметров работы преобразователя.
ПДУ подключается к преобразователю при помощи специального соединительного кабеля. Максимальная длина соединительного кабеля – 300м.
Управление преобразователем от внешней системы управления или персонального компьютера осуществляется по каналу связи RS-485, при этом для управления может использоваться один из следующих протоколов:
• протокол ПДУ;
• протокол ModBus-RTU;
• протокол ModBus-ASCII
Местный пульт управления
Местный пульт управления преобразователя имеет 3 варианта исполнения:
• с управляющими кнопками;
• с поворотным энкодером управления;
• с потенциометром пульта.

Двойное нажатие на кнопку ПУСК переводит преобразователь в состояние "работа", при этом производится разгон двигателя в соответствии с заданными настройками. Двойное нажатие на кнопку СТОП переводит преобразователь в состояние "останов", при этом производится останов двигателя в соответствии с заданными настройками.
Строка функций содержит три поля функциональных команд, доступных в текущий момент для выполнения кнопкой выбора, расположенной под соответствующим полем. Строка статуса имеет три поля, в которых отображаются значения текущих параметров преобразователя, выбранных пользователем.
При включении преобразователя на пульте управления выводится экран состояния , на котором крупным шрифтом отображаются поля, заданные для отображения в строке статуса. Выход из экрана ожидания осуществляется при нажатии на любую кнопку. При работе преобразователя вызов экрана состояния осуществляется нажатием на кнопку Отмена при нахождении в главном меню или с помощью соответствующей кнопки выбора с функцией "Инфо".
Для дисплея пульта управления могут быть настроены яркость и контрастность, а также автоматическое гашение подсветки дисплея в случае длительного отсутствия нажатия на кнопки. Световые индикаторы "РЕЖИМ", "АВАРИЯ" и "РАБОТА" отображают состояние преобразователя в соответствии с таблицей 3.1.2.
Таблица 3.2 Отображение световых индикаторов

4. Экономический раздел
4.1 Оценка экономической эффективности мероприятий по экономии топливно-энергетических ресурсов
Основными факторами, влияющими на экономическую эффективность применения и внедрения автоматизированной системы коммерческого учета энергии и мощности (АСКУЭ) являются:
- снижение сезонной и суточной неравномерности графиков электрических нагрузок как следствие осуществления режимов ограничения мощности;
- снижение величины заявленной мощности;
- снижение потерь электроэнергии в питающих и распределительных сетях;
- выбор оптимального сочетания регулировочных мероприятий по снижению договорной мощности и электропотребления;
- сочетание оперативных средств контроля и управления нагрузками с долговременными;
- снижение стоимости технических средств учета контроля и управления электропотреблением.
Эффективность внедрения АСКУЭ на предприятиях нефтегазодобывающего комплекса связана с минимизацией затрат направленных на организацию коммерческого учета на электроэнергию и рассчитывается по следующей методике.
Расчет экономического эффекта от внедрения научно-технического мероприятия проводится согласно требованиям РД 39-01/06-000-89 "Методические рекомендации по комплексной оценке эффективности мероприятия, направленные на ускорение научно-технического прогресса в нефтяной промышленности".
Согласно этой методике суммарный по годам расчетного периода экономический эффект рассчитывается по следующей формуле:
![]() (4.1)
(4.1)
где Эт - экономический эффект научно-технического мероприятия за расчетный период; РТ – стоимостная оценка результатов осуществления научно-технического мероприятия за расчетный период; ЗТ – стоимостная оценка затрат на осуществление научно-технического мероприятия за расчетный период.
Для более правильного
предоставления полученного значения экономического эффекта необходимо привести
все технико-экономические показатели, величины затрат и стоимостей к единому
моменту времени – расчетному (базовому) периоду. В качестве такого периода
обычно выступает предшествующий началу использования новой технологии или
внедрения научно-технического мероприятия календарный год. Подобное приведение
осуществляется при помощи коэффициента приведения ![]() на
который умножаются величины затрат и результатов всех лет рассматриваемого
периода.
на
который умножаются величины затрат и результатов всех лет рассматриваемого
периода.
Величина ![]() определяется по формуле:
определяется по формуле:
![]() (4.2)
(4.2)
где Ен – норматив приведения разноименных затрат и результатов, численно равный нормативу эффективности капитальных вложений; iр – расчетный (базовый) год; i – год, показатели которого приводятся к расчетному.
Величина Рт определяется следующим образом:
![]() (4.3)
(4.3)
где Рi – стоимостная оценка результатов в i-м году расчетного периода;
iн – первый (начальный) год расчетного периода;
iк – последний (конечный) год расчетного периода.
В качестве начального года рассматриваемого периода принимается год начала финансирования работ по осуществлению мероприятия, включая
проведенные научные исследования.
Конечный год расчетного периода может определяться плановыми (нормативными) сроками обновления продукции по условиям ее производства и использования , либо сроками службы средств труда.
Стоимостная оценка результатов мероприятий определяется в виде суммы основных и сопутствующих результатов:
![]() (4.4)
(4.4)
Стоимостная оценка основных результатов мероприятий определяется для т средств руда длительного пользования, использование которых изменяет экономические показатели существующего производства продукции:
![]() (4.5)
(4.5)
где ![]() - изменение объема
выпускающейся продукции в i-м году;
- изменение объема
выпускающейся продукции в i-м году;
![]() - изменение текущих затрат на
производство продукции в i-м
году;
- изменение текущих затрат на
производство продукции в i-м
году;
![]() - изменение капитальных вложений,
связанных с использованием новых предметов и средств труда в i-м году;
- изменение капитальных вложений,
связанных с использованием новых предметов и средств труда в i-м году;
P – стоимость единицы выпускаемой продукции.
Стоимостная оценка сопутствующих результатов включает дополнительные экономические результаты и экономические оценки социальных и экономических последствий реализации научно-технического мероприятия.
Затраты на реализацию научно-технического мероприятия за расчетный период включают затраты при производстве и при использовании продукции:
![]() (4.6)
(4.6)
где ![]() - затраты при производстве
продукции за расчетный период;
- затраты при производстве
продукции за расчетный период;
![]() - затраты на использование продукции
(без учета затрат на приобретение ее) за расчетный период.
- затраты на использование продукции
(без учета затрат на приобретение ее) за расчетный период.
Затраты при производстве (использовании) продукции рассчитывается единообразно:
![]() (4.7)
(4.7)
где ![]() - величина затрат всех
ресурсов в i-м году (включая затраты на получение сопутствующих
результатов);
- величина затрат всех
ресурсов в i-м году (включая затраты на получение сопутствующих
результатов);
![]() - текущие издержки при производстве
(использовании) продукции в i-м
году без учета амортизационных отчислений;
- текущие издержки при производстве
(использовании) продукции в i-м
году без учета амортизационных отчислений;
![]() - единовременные затраты при
производстве (использовании) продукции в i-м году;
- единовременные затраты при
производстве (использовании) продукции в i-м году;
![]() - остаточная стоимость
(ликвидационное сальдо) основных фондов, выбывающих в i-м году (в случае, если на конец
расчетного периода остаются основные фонды, которые можно использовать еще в
течении ряда лет, величина
- остаточная стоимость
(ликвидационное сальдо) основных фондов, выбывающих в i-м году (в случае, если на конец
расчетного периода остаются основные фонды, которые можно использовать еще в
течении ряда лет, величина ![]() определяется как остаточная стоимость указанных
фондов.
определяется как остаточная стоимость указанных
фондов.
Исходные данные для расчета экономического эффекта представлены в таблице 4.1.
Таблица 4.1 Исходные данные для расчета экономического эффекта
| № п/п | Наименование затрат | Ед. изм. |
Базовый вариант |
Частотный регулятор |
| 1 | Стоимость устройства Altivar | тыс. руб. | 112 | |
| Срок сужбы устройства Altivar | лет | 7 | ||
| 2 | Потери электроэнергии до установки | кВт*ч | 4380 | |
| 3 | Транспортные расходы | |||
| УАЗ | руб. / час | 179 | ||
| ЦА-320 | руб. / час | 229 | ||
| АНРВ | руб. / час | 120 | ||
| Время работы техники | час | 8 | 8 | |
| Итого транспортные расходы | руб. | 3264 | 960 | |
| 4 | Трудозатраты | |||
| -оператор добычи 4-го разряда | чел. | 2 | 2 | |
| Тарифная ставка | руб./час | 8,938 | 8,938 | |
| -электросварщик 6-го разряда | чел. | 1 | 1 | |
| Тарифная ставка | руб./час | 12,477 | 12,477 | |
| -слесарь 5-го разряда | чел. | 1 | 1 | |
| Тарифная ставка | руб./час | 10,035 | 10,035 | |
| Количество часав | час | 8 | 4 | |
| Зарплата | руб. | 322,86 | 161,43 | |
| Зарплата с учетом премий и отчислений | руб. | 1321 | 660 | |
| 5 | Цена 1 тонны нефти | руб./т. | 3560 | |
| 6 | Условно – переменные затраты на 1 тонну нефти | руб./т. | 129,81 | |
| 7 | НДПИ | руб./т. | 619,29 | |
| 8 | Объем внедрения | шт. | 12 |
4.2 Методика оценки экономической эффективности новой техники
Внедрение новой техники, совершенствование организации производства требует капиталовложений. От эффективности выбираемых технических решений зависит темп роста производства. В связи с этим важен методологический подход к определению экономической эффективности новой техники.
Для определения экономической эффективности используют следующие технико-экономические показатели:
Дополнительные капиталовложения на внедрение новой техники;
Себестоимость продукции;
Срок окупаемости дополнительных капиталовложений;
Приведенные затраты;
Производительность труда.
По источникам финансирования все мероприятия по внедрению новой техники можно подразделить на финансирующиеся за счет:
Издержек производства;
Капиталовложений.
Выбор наилучшего варианта реализации мероприятия НТП на этапе технико-экономического обоснования сводится к следующему:
- отбираются варианты из потенциально возможных, каждый из которых удовлетворяет всем заданным ограничениям: социальным стандартам, экологическим требованиям, по времени реализации и др. В число рассматриваемых вариантов обязательно включаются наиболее прогрессивные технико-экономические показатели, которые превосходят или соответствуют лучшим мировым достижениям.
При этом должно учитываться возможности закупки техники в необходимом количестве за рубежом, организации собственного производства на основе приобретения лицензии, организации совместного производства с зарубежными странами;
- по каждому варианту из числа допустимых определяются (с учетом динамики) затраты, результаты и экономический эффект;
- лучшим признается вариант, у которого величина экономического эффекта максимальна, либо – при условии тождества полезного результата – затраты на его достижение минимальны.
Экономический эффект рассчитывается по формуле:
Э = З1 - З2 (4.8)
З1 - затраты до внедрения новой техники:
З1 = С1 + ×К1 (4.9)
З2 - затраты после внедрения новой техники:
З2 = С2 + Е ×К2 (4.10)
С1 - текущие затраты после внедрения новой техники.
Сп - текущие затраты на электроэнергию после внедрения новой техники.
Е - нормативный коэффициент окупаемости:
Е = Ен + ЕА + ЕТР (4.11)
Ен - нормативный коэффициент отчислений по отрасли (0,15)
ЕА -нормативный коэффициент отчислений на амортизацию (0,1);
ЕТР -нормативный коэффициент отчислений на текущий ремонт (0,05).
Е = 0,15 + 0,1 + 0,05 = 0,3
Срок окупаемости:
![]() (4.12)
(4.12)
К1, К2 - капитальные вложения до и после внедрения новой техники.
Расчет экономического эффекта от внедрения ЧРП представлен в таблице 4.2
Таблица 4.2 Расчет экономичесого эффекта от внедрения ЧРП
| № п/п | Показатель | Ед. изм. | Годы | |||
| 1 | 2 | 3 | 4 | |||
| I | Инвестиционная деятельность | |||||
| Приобретение частотного регулятора | т.р. | -112 | ||||
| II | Операционная деятельность | |||||
| 1 | Изменение эксплуатационных расходов : | |||||
| -снижение рас хода электроэнергии | т.р. | 89,35 | 89,35 | 89,35 | 89,35 | |
| -снижение трудозатрат | т.р. | 5,33 | 5,20 | 5,10 | 5,00 | |
| 2 | Амортизационные отчисления | т.р. | -10 | -10 | -10 | -10 |
| 3 | НДПИ | т.р. | -15 | -15 | -15 | -15 |
| 4 | Налог на имущество | т.р. | -3,9 | -3,3 | -2,7 | -2,1 |
| 5 | Налогооблагаемая прибыль | т.р. | 65,78 | 66,25 | 66,75 | 67,25 |
| 6 | Налог на прибыль | т.р. | -15,78 | -15,9 | -16 | -16,8 |
| 7 | Чистая прибыль | т.р. | 50 | 50,35 | 50,75 | 50,44 |
| 8 | Сальдо операционной Деятельности (чистая прибыль+амортизация) | т.р. | 60 | 60,35 | 60,75 | 60,44 |
| 9 | Поток наличности | т.р. | - | 8,35 | 60,75 | 60,44 |
| 10 | Коэффициент дисконтирования | д.е. | - | 0,833 | 0,694 | 0,579 |
| 11 | Дисконтированный поток наличности | т.р. | - | 6,95 | 42,14 | 35,00 |
| 12 | Чистая текущая прибыль | т.р. | - | 6,95 | 49,09 | 84,09 |
| 13 | На объем внедрения | т.р. | - | 83,4 | 589 | 1009 |
| 14 | Срок окупаемости | лет | 1,5 |
4.3 Расчет экономической эффективности от внедрения частотно регулированного привода
Современный подход к автоматизации процессов нефтедобычи диктует жесткие требования к программно-аппаратным комплексам контроля и управления штанговыми глубинными насосами (ШГН). Это не в последнюю очередь обусловлено высокой стоимостью электроэнергии. В целях её экономии применяется частотно – регулируемый привод станка – качалки.
Для СКН, работающих постоянно, суммарная потребляемая мощность приблизительно равна:
![]()
Стоимость ЧРП составляет
112 тыс. руб. Для модернизации необходимо закупить 12 ЧРП общей стоимостью: ![]()
Дополнительные капиталовложения на обслуживание ЧРП составят :
∆К=60 тыс. руб.
Экономический эквивалент
мощности при числе трансформаций около трёх может быть ориентировочно принят ![]()
![]() (4.13)
(4.13)
Рр=6
Тм=5500 часов Wa=33 МВт∙час
ϕ1=31,729ϕ2=0
W=К∙ Wa∙(tg ϕ1-tg ϕ2) (4.14)
W=2,44 МВт∙час
∆С= m1∙Pp + m2∙W= 115,2 тыс. руб. (4.15)
где m1=196 руб. m2=0,544 руб.
Добыча нефти за год А1=51903 т
Т.к. добыча нефти не изменится из-за внедрения мероприятия, то экономический эффект составит снижение затрат на электроэнергию:
Эг= (∆С-Ен ∙ ∆К)=89,35 тыс. руб. (4.16)
Срок окупаемости - ∆К/∆С = 1,5 года
Главные экономические показатели приведены в таблице 4.3
Таблица 4.3 Главные экономические показатели
| № | Мероприятия | Ед. изм. | Значение |
| 1 | Изменение капиталовложений ∆К | тыс. руб. | 172,93 |
| 2 | Изменение текущих затрат. ∆С | тыс. руб. | 115,2 |
| 4 | экономический эффект Эг | тыс. руб. | 89,35 |
| 5 | Срок окупаемости Ток | год | 1,5 |
5. Охрана труда и окружающей среды
5.1 Защита электрических установок от перенапряжений и заземляющие устройства
5.1.1 Общие сведения
Изоляция электрооборудования подразделяется на внешнюю, работающую на открытом воздухе, и внутреннюю, работающую в масляной, газовой или иной среде, защищенной от воздействия внешних атмосферных условий. Как внешняя, так и внутренняя изоляция электрооборудования испытывается импульсным напряжением той или иной полярности. Объем и порядок испытаний установлены ГОСТ 1516.1 – 76 и 1516.2 – 76. Полный грозовой импульс должен иметь продолжительность 1,2 ± 0,36 мкс. При испытании внутренней изоляции силовых трансформаторов напряжения и масляных реакторов требуется, чтобы предразрядное время было 2 – 3 мкс.
Внешняя изоляция электрооборудования должна испытываться на прочность в сухом состоянии и под дождем напряжением промышленной частоты плавным подъемом напряжения до значения испытательных напряжений. Внутренняя изоляция должна выдерживать в течении одной минуты установленные ГОСТом испытательные напряжения.
Прочность изоляции любой электроустановки должна быть выше максимального уровня рабочего напряжения данной электроустановки, а также возможного уровня большинства внутренних перенапряжений. С повышением уровня прочности изоляции стоимость электроустановок существенно возрастает. Поэтому оказывается экономически нецелесообразно повышать прочность изоляции до уровня – выше максимально возможного уровня внутренних перенапряжений и тем более выше уровня грозовых перенапряжений.
Внутренние перенапряжения электроустановки могут быть снижены путем надлежащего выбора режима заземления нейтрали, схем электрических станций и сетей, применением в выключателях резисторов,
шунтирующих контакты.
От максимально возможных внутренних перенапряжений, а также от грозовых перенапряжений все электроустановки должны иметь специальную защиту. Основным защитным средством при различных перенапряжениях являются вентильные разрядники различного исполнения. При выполнении электроустановок и осуществлении их защиты важнейшим вопросом является координация изоляции, т.е. установление и обеспечение необходимых соотношений между прочностью изоляции электрооборудования и характеристиками защитных устройств от перенапряжений. При всех возможных режимах работы электрооборудования прочность его изоляции должна быть выше соответствующих характеристик защитных устройств.
Уровень грозовых перенапряжений в конкретной электрической сети не зависит от ее номинального напряжения, а уровень внутренних перенапряжений, наоборот, зависит от номинального напряжения сети. По этой причине выбор уровня изоляции электрооборудования в основном лимитируется уровнем грозовых перенапряжений.
Важным элементом электроустановок являются заземляющие устройства, необходимые для обеспечения нормальных режимов работы электроустановок, осуществления их защиты от перенапряжений, а также создания безопасных условий эксплуатации электроустановок.
5.1.2 Внутренние перенапряжения
Внутренние перенапряжения можно подразделить на коммутационные и квазистационарные. Характер, значение и причины возникновения перенапряжений различны. Коммутационные перенапряжения могут возникнуть при включении и отключении электрических линий, трансформаторов, шунтирующих и дугогасящих реакторов, при возникновении перемежающейся дуги замыкания на землю в системах с незаземленной нейтралью, при коротких замыканиях, коммутациях и при качаниях генераторов электростанций в системах, содержащих длинные электрические линии различного типа. Квазистационарные перенапряжения, существующие продолжительный период времени, могут возникнуть при однофазных
замыканиях и при неполнофазных режимах в энергосистеме, при работе протяженных электрических линий работающих на холостом ходу, при коротких замыканиях, при возникновении в системе параметрического резонанса или феррорезонанса, высших или низших гармониках.
Внутренние перенапряжения характеризуются кратностью. В энергосистемах с учетом возможных уровней перенапряжений и технико-экономических характеристик электрических линий приняты следующие допустимые кратности:
|
UНОМ, кВ |
3 | 6 | 10 | 20 | 35 | 110 | 150 | 220 | 330 | 500 | 750 | 1150 |
|
UРАБ/UНОМ |
1,2 | 1,15 | 1,15 | 1,15 | 1,15 | 1,15 | 1,15 | 1,15 | 1,1 | 1,05 | 1,05 | 1,05 |
| К | 5,2 | 4,6 | 4,25 | 4,25 | 3,8 | 3,2 | 3 | 3 | 3 | 2,5 | 2,2 | 1,8 |
Согласно рекомендациям МЭК уровень изоляции для коммутационных перенапряжений должен составлять примерно 80% импульсного уровня изоляции. Принятый в энергосистемах режим нейтралей, схемы, а также характеристики устройств должны обеспечивать работу электрических сетей с кратностью внутренних перенапряжений не выше допустимой.
5.1.3 Грозовые перенапряжения
Грозовые перенапряжения возникают при разрядах молнии. Ток молнии имеет вид униполярного апериодического импульса и характеризуется амплитудой и длиной импульса.
Зарегистрированы амплитуды токов молнии от сотен ампер до 250 кА с длиной импульса 20 – 80 мкс. Вероятность появления молнии с верхним пределом параметров относительно мала, поэтому в качестве расчетных параметров обычно принимают: IМАКС = 150 кА; ТИ = 40 мкс.
Интенсивность грозовой деятельности характеризуется числом грозовых дней в году или, что более точно числом грозовых часов в году. Так средняя продолжительность грозы составляет 1-2 часа. В среднем на один квадратный километр площади земли приходится примерно 0,1 удара молнии за один грозовой день.
В зависимости от длины электрической линии и высоты опор среднее число ударов молнии в линию за год колеблется от 250 (для линий 750 кВ) до 5 (для линий 35 кВ). При отсутствии специальной грозозащиты и недостаточной импульсной прочности изоляции линий эти удары молнии в большинстве случаев приводили бы к перекрытию изоляции линий и их отключению. Допустимые импульсные напряжения для изоляции электрооборудования определяются гарантированной импульсной прочностью, которая установлена несколько ниже импульсных испытательных напряжений.
5.1.4 Защита электроустановок от перенапряжений
Волны грозовых перенапряжений, возникающие во время грозы в электрических линиях, распространяются по сети и воздействуют на изоляцию как самих линий, так и электрооборудования электрических станций и подстанций.
Защита электроустановок от грозовых перенапряжений осуществляется разрядниками. Простейшим типом разрядника является искровой промежуток, состоящий из двух электродов, один из которых подсоединяется к защищаемому объекту, а второй – к заземлителю. Искровой промежуток пробивается при появлении на нем напряжения, превышающего его импульсное разрядное напряжение. Искровой промежуток срезает волну перенапряжения, приходящую с линии, и тем самым защищает оборудование электроустановки от пробоя или перекрытия. Однако разрядная характеристика искрового промежутка нестабильна и зависит от состояния электродов и внешних атмосферных условий. Кроме того, срабатывание искрового промежутка приводит к появлению опасного короткого замыкания в сети и, следовательно, требует отключения соответствующих элементов электроустановки, что нежелательно. Из-за этого искровые промежутки используются ограниченно и только в качестве дополнительных средств защиты изоляции от перенапряжений. Основным же средством защиты от грозовых перенапряжений являются грозозащитные разрядники. В энергетических системах используют разрядники двух типов : трубчатые и
вентильные. Трубчатые разрядники просты по конструкции и относительно дешевы. Они устанавливаются на линиях, на подходах к подстанциям и используются для защиты изоляции электрических линий, а также в качестве дополнительных средств защиты подстанционной изоляции. Вентильные разрядники являются более совершенными, но и более дорогими аппаратами. Они используются для защиты подстанционной изоляции и устанавливаются: на сборных шинах электроустановок, если к этим шинам подключены воздушные электрические линии; на выводах высшего и среднего напряжения автотрансформаторов; в цепях силовых трансформаторов и отдельных линий, если разрядники, установленные на шинах, не обеспечивают должной защиты оборудования; в нейтралях силовых трансформаторов 110-220 кВ, допускающих работу с изолированной нейтралью.
Для эффективной защиты изоляции электроустановок от перенапряжений требуется, чтобы импульсная вольт-секундная характеристика изоляции во всех точках лежала выше соответствующей характеристики разрядника. Трубчатые разрядники имеют крутые вольт-секундные характеристики и поэтому не пригодны для защиты изоляции трансформаторов, выключателей и электрических машин, имеющих относительно пологие вольт-секундные характеристики изоляции. Необходимыми в этих случаях характеристиками обладают вентильные разрядники. Такие разрядники имеют многократный искровой промежуток и включенный последовательно с ним резистор из вилита или тервита с нелинейной рабочей характеристикой, помещенный в герметизированный фарфоровый цилиндр.
В энергосистемах используются вентильные разрядники типов РВС (разрядник вентильный станционный), РВП (разрядник вентильный подстанционный), РВМГ (разрядник вентильный с магнитным гашением), РВМК (разрядник вентильный с магнитным гашением дуги, комбинированный) и РВВМ (разрядник вентильный для вращающихся машин).
Разрядники по назначению делят на четыре группы: 1(тяжелый режим) – для защиты от грозовых и коммутационных перенапряжений; 2,3,4 (легкий режим) – для защиты от грозовых перенапряжений.
Защита электроустановок от внутренних перенапряжений осуществляется с использованием различных средств и методов. Прежде всего стараются ограничить значение внутренних перенапряжений. Это достигается следующим путями: внедрением устройств релейной защиты и автоматики, ограничивающих как значение, так и длительность перенапряжений; установкой в выключателях резисторов, шунтирующих контакты, что приводит к ограничению внутренних перенапряжений при переходных процессах; схемными мероприятиями.
Для защиты электроустановок от внутренних перенапряжений при переходных процессах используют также вентильные разрядники. Условия работы таких разрядников (коммутационных) существенно отличаются от условий работы грозозащитных разрядников. Коммутационные разрядники должны длительно пропускать и затем обрывать токи при перенапряжениях установившегося режима. Грозозащитные разрядники должны быть способны пропустить кратковременный большой импульсный ток и погасить дугу сопровождающего тока. Таким образом, требования к коммутационным разрядникам в отношении их пропускной и дугогасящей способности выше аналогичных требований к грозозащитным разрядникам.
Для защиты электроустановок от внутренних и грозовых перенапряжений разработаны и в последнее время широко применяются нелинейные ограничители перенапряжений (ОПН) на основе окиси цинка, имеющие лучшие характеристики, чем вентильные разрядники. Использование ОПН в распределительных устройствах 110 – 750 кВ электростанций и подстанций позволяет существенно сократить площади ОРУ до 15 %. Ограничители перенапряжений находят широкое применение в электрических сетях более низкого напряжения, в том числе в сетях собственных нужд электростанций для защиты электродвигателей от перенапряжений.
5.1.5 Заземляющие устройства
Заземляющие устройства представляют собой электротехнические устройства, предназначенные для создания надежных и обладающих небольшим сопротивлением заземлений определенных частей электрических машин, электрических аппаратов, токопроводов и молниеотводов с целью обеспечения принятых режимов работы электроустановок, защиты их персонала от поражения электрическим током, выполнения грозозащиты и зашиты от перенапряжений. Различают грозозащитное, защитное и рабочее заземление.
Грозозащитное необходимо для обеспечения эффективной защиты электроустановок от грозовых перенапряжений. К грозозащитному заземлению относятся заземления стержневых и тросовых молниеотводов, металлических крыш зданий и сооружений, металлических и железобетонных опор электрических линий и порталов распределительных устройств, заземления искровых промежутков и разрядников.
Защитное заземление необходимо для обеспечения безопасности персонала при обслуживании электроустановки. К защитному заземлению относятся заземления внешних металлических частей электрических машин, трансформаторов, электрических аппаратов и токопроводов, в нормальном режиме не находящихся под напряжением. При эксплуатации к этим частям могут прикасаться люди, несмотря на то, что при возможном пробое изоляции на них может появиться напряжение. К защитному заземлению относится также заземление в одной точке вторичных цепей трансформаторов тока и напряжения.
Рабочее заземление необходимо для обеспечения нормальной работы электроустановки, ее частей и сети в соответствии с принятым для них режимом функционирования. К рабочему заземлению относятся заземления нейтралей силовых трансформаторов, генераторов, реакторов поперечной компенсации на длинных электрических линиях, измерительных трансформаторов напряжения и т.п.
Обычно для выполнения всех трех типов заземлений электроустановки используют одно заземляющее устройство. Оно состоит из заземлителя, непосредственно соприкасающегося с землей, и системы проводников, соединяющих заземляемые элементы с заземлителем.
Различают естественные и искусственные заземлители. К естественным относятся: находящиеся в земле металлические трубопроводы (кроме трубопроводов с горючими жидкостями), стальные и свинцовые оболочки кабелей, обсадные трубы артезианских скважин, металлические и железобетонные фундаменты зданий и сооружений и т.п., используемые для отвода тока в землю. Искусственные представляют собой специально зарытые в землю системы жестко связанных (электрически) вертикальных и горизонтальных проводников, служащих для проведения тока в землю. Часто в электроустановках используются и те и другие заземлители, включенные параллельно.
Искусственные заземлители, как правило, выполняют контурными. Такие заземлители обязательны для установок напряжением выше 1000 вольт и рекомендуются в электроустановках напряжением до 1000 вольт.
Контурные заземлители имеют вертикальные стальные электроды длиной 2 – 20 метров, которые располагаются по периметру электроустановки или распределительного устройства (на территории, на расстоянии 3 метра от внешнего ограждения). Электроды заглубляют так, чтобы их верхний конец был ниже поверхности земли на 0,5-0,7 метра. На этом же уровне к электродам сваркой присоединяют проводники, образующие металлическую сетку с шагом не более 6 метров из круглых или прямоугольных стальных проводников. Такая сетка предназначена для выравнивания потенциала на поверхности земли в пределах контурного заземлителя. ПУЭ регламентируют наименьшие размеры стальных заземлителей и заземляющих проводников, проложенных в земле, в зданиях и наружных установках. Так, при прокладке в земле круглые проводники должны иметь диаметр не менее 6 мм, проводники прямоугольного сечения – сечение не менее 48 мм2 и толщину не менее 4 мм.
Основное требование к заземлителю сводится к тому, чтобы он при умеренной стоимости обладал по возможности более низким сопротивлением растеканию тока в земле. Чем ниже сопротивление заземлителя RЗ ,тем эффективнее он выполняет свои функции рабочего, защитного и грозозащитного заземлений.
Согласно ПУЭ сопротивление заземляющих устройств, Ом, должно быть:
1.
в электроустановках
напряжением выше 1000 вольт сетей с эффективным заземлением нейтрали - ![]() ;
;
2.
в
электроустановках напряжением выше 1000 вольт сетей с незаземленной нейтралью -
 ;
;
RЗ ≤ 10 Ом; IЗ – ток замыкания на землю, А.
3.
если заземляющее
устройство одновременно используется также для установок до 1000 вольт, то -  ;
;
В настоящее время, в связи с выявившейся трудностью создания заземляющих устройств, нормированных по допустимому сопротивлению
заземления, существуют предложения по изменению оценки качества заземляющих устройств. Предлагается их нормировать по физически более ясному, с точки зрения безопасности людей, критерию – допустимому напряжению прикосновения или предельно допустимому нефибрилляционному току.
5.2 Расчет молниезащиты подстанции
При проектировании подстанции системы электроснабжения необходимо учитывать и предотвращать возможность их поражения ударами молнии. Особенно это относится к открытым электроустановкам. Прямое попадание молнии в проводник или электрооборудование установки приводит к их электродинамическому разрушению. Во избежание такой опасности установки электроснабжения снабжают молниеотводами.
Для защиты проектируемой подстанции от ударов молнии выбираем тип защиты со стержневым молниеотводом. Подходящую воздушную линию предполагаем защитить тросовым молниеотводом по всей длине.
Тип зоны защиты при использовании стержневых молниеотводов – зона Б. Категория молниезащиты – II.
Исходные данные:
высота защищаемого объекта hx = 6 м;
размеры объекта aґb = 48ґ50 м;
ток молнии Iм = 150 кА;
электрическая прочность воздуха Eв = 500 кВ/м;
электрическая прочность земли Eз = 300 кВ/м.
1.Среднегодовое число ударов молний на 1км2 поверхности земли для нашего района при среднегодовой продолжительности гроз 40-60 часов n=6:
![]() (5.1)
(5.1)
Ожидаемое число поражений молнией в год зданий и сооружений, не оборудованых молнезащитой.
![]() ;
;
2.Амплитудное импульсное напряжение на молниеотводе, вершина которого расположена на высоте hx:
![]() кВ (5.2)
кВ (5.2)
гдеRи = 10 Ом — импульсное сопротивление заземлителя.
3. Расстояние по воздуху должно быть не менее:
 м. (5.3)
м. (5.3)
4. Расстояние в земле
 м. (5.4)
м. (5.4)
При таких значениях расстояний не произойдёт пробоя между молниеотводами и защищаемым сооружением.
5. Защиту выполним двумя отдельно стоящими металлическими молниеотводами стержневого типа высотой h1 = 26,1 м; h2 = 27,2 м;
Определим параметры зоны защиты, учитывая, что L >h, гдеL = a+2·Sз = 40+2·5 = 50 расстояние между опорами молниеотводов, м;
6. Высота, на которой находится вершина кругового конуса:
h0.1 = 0,85∙h1 = 0,85∙26,1 = 22,185 м (5.5)
h0.2 = 0,85∙h2 = 0,85∙27,2 = 23,12 м (5.6)
Радиус круга зоны защиты на уровне земли:
r0.1 = (1,1 – 0,002∙h1)∙h1 = (1,1 – 0,002∙26,1)∙26,1 = 27,34 м (5.7)
r0.2 = (1,1 – 0,002∙h2)∙h2 = (1,1 – 0,002∙27,2)∙27,2 = 28,44 м (5.8)
Зона защиты в середине пролета между молниеотводами:
 (5.9)
(5.9)
Радиус круга зоны защиты на уровне hX = 6 м:
![]() м (5.10)
м (5.10)
![]() м (5.11)
м (5.11)

7. Определим параметры защитной зоны в точке L/2 (посередине между молниеотводами).
Высота:
![]() м (5.12)
м (5.12)
![]() м (5.13)
м (5.13)
![]() м (5.14)
м (5.14)
Внутренняя область защиты на высоте hx:
![]() м (5.15)
м (5.15)
8. Кроме выбора и установки молниеотводов предусматриваем по четыре вертикальных электрода, соединённых между собой стальной полосой. Для защиты объекта от вторичных проявлений молнии, электромагнитной и электростатической индукции, и заноса высоких потенциалов в сооружения предусматриваем следующие мероприятия:
а) для защиты от потенциалов, возникающих в результате электростатической индукции, надёжно заземляем все проводящие элементы объекта, а также оборудование и коммуникации внутри объекта;
б) для защиты от искрения, вызываемого электромагнитной индукцией, все параллельно расположенные металлические коммуникации соединяем металлическими перемычками;
в) для защиты объекта от заноса высоких потенциалов присоединяем все металлические коммуникации и оболочки кабелей (в месте ввода их в помещение) к заземлителю защиты от вторичных воздействий молнии.
5.3 Расчет заземления подстанции
В соответствии с ПУЭ заземления должны применяться при напряжении 380 В и выше переменного тока и 440 В и выше постоянного тока во всех случаях, а в помещениях с повышенной опасностью, особо опасных и в наружных электроустановках — при номинальных напряжениях выше 42 В переменного тока и 110 В постоянного тока.
Согласно ПУЭ сопротивление заземляющих устройств, Ом, должно быть:
4.
в
электроустановках напряжением выше 1000 вольт сетей с эффективным заземлением
нейтрали - ![]() ;
;
5.
в
электроустановках напряжением выше 1000 вольт сетей с незаземленной нейтралью -
; RЗ ≤ 10 Ом; IЗ – ток замыкания на землю, А.
6.
если заземляющее
устройство одновременно используется также для установок до 1000 вольт, то -  ;
;
Заземлению подлежат все части электрооборудования, нормально не находящиеся под напряжением, но могущие оказаться под опасным для жизни напряжением в результате повреждения изоляции.
На современных подстанциях в качестве заземлителей применяются трубы длиной 2–3 м и диаметром 25–50 мм, а также угловая сталь 50ґ50 или 63ґ63 мм. Электроды заглубляют на 0,5–0,7 м от поверхности земли и соединяют между собой стальной полосой толщиной не менее 4 мм или круглой сталью диаметром не менее 10 мм, приваренной к верхним концам электродов.
Внутри распределительного устройства прокладывают заземляющие шины, присоединяемые не менее чем в двух местах к заземляющему контуру. В качестве заземляющих проводников могут быть также использованы нулевые проводники питающей сети. К основным заземляющим проводам присоединяют подлежащие заземлению предметы.
В цепях заземляющих проводов не должно быть разъединяющих приспособлений и предохранителей.
Каждый заземляемый предмет должен быть присоединён к заземляющей сети посредством отдельного ответвления. Последовательное соединение заземляемых предметов не допускается ввиду того, что при отключении от заземляющей сети одного из предметов лишаются заземления все остальные.
Расчёт заземления сводится главным образом к расчёту собственно заземлителя, так как заземляющие проводники в большинстве случаев принимаются по условиям механической прочности и устойчивости к коррозии.
Площадь, занимаемая
подстанцией, составляет 48м![]() 50м.
Район относится ко 2й климатической зоне.
50м.
Район относится ко 2й климатической зоне.
Согласно ПУЭ сопротивление заземляющего устройства для установок 35 кВ не должно быть выше 10 Ом.
Таким образом, в качестве расчетного принимается RЗ=10 Ом.
Искусственный заземлитель отсутствует.
1. Определяем удельное сопротивление грунта для вертикальных и горизонтальных заземлителей:
rрв = kс·r = 2·100 = 200 Ом·м (5.14)
rрг = kс·r = 6·100 = 600 Ом·м (5.15)
гдеkс — коэффициент сезонности, учитывающий промерзание и просыхание грунта;
r = 100 Ом·м — удельное сопротивление грунта (суглинок) в месте сооружения заземлителя.
2. Глубина заложения заземлителей:
![]() м (5.16)
м (5.16)
гдеt0 = 0,5–0,7 — глубина заложения верхнего конца заземлителя, м.
3. Определяем сопротивление растеканию одного вертикального электрода — уголка №50 длиной 3 м:

 Ом (5.17)
Ом (5.17)
гдеrрв — расчётное удельное сопротивление грунта, Ом·м;
lв — длина электрода, м; b — ширина полки уголка, м; t — глубина заложения, м.
4. Примерное число вертикальных заземлителей
![]() (5.18)
(5.18)
гдеkи.в — коэффициент использования вертикальных заземлителей.
5. Определим длину горизонтального заземлителя:
lг = 1,05·nв·a = 1,05 · 9 · 6 = 56,7 м (5.19)
6. Сопротивление растеканию горизонтальных электродов — полос 40ґ4 мм2, приваренных к верхним концам уголков:
![]() Ом (5.20)
Ом (5.20)
7. Уточнённое сопротивление вертикальных электродов:
![]() Ом (5.21)
Ом (5.21)
8. Уточнённое число вертикальных электродов:
![]() (5.22)
(5.22)
Окончательно принимаем 8 уголков.
Дополнительно к контуру на территории подстанции устраивается сетка из продольных полос, расположенных на расстоянии 0,8-1 м от оборудования с поперечными связями через каждые 4 м. Дополнительно для выравнивания потенциалов у входов и въездов, а также по краям контура прокладываются углубленные полосы. Эти неучтенные горизонтальные электроды уменьшают общее сопротивление заземления, проводимость их идет в запас надежности.
6. Гражданская оборона
6.1 Законодательные и нормативно-правовые акты в области ГО
Федеральный закон Российской Федерации от 21.12.1994г. № 68-ФЗ "О защите населения и территорий от ЧС природного и техногенного характера" (в ред. 18.12.06.)
Федеральный закон Российской Федерации от 12.02.1998 г. №28-ФЗ "О гражданской обороне" (в ред. 19.06.07.)
Федеральный закон Российской Федерации от 21.12.1994 г. № 69-ФЗ "О пожарной безопасности" (в ред. 18.12.06)
Федеральный закон Российской Федерации от21.06.1997г. № 116-ФЗ "О промышленной безопасности опасных производственных объектов" (в ред.18.12.06)
Постановление Правительства Российской Федерации от 4.09.2003г. №547 "О подготовке населения в области защиты от чрезвычайных ситуаций природного и техногенного характера" (в ред. 01.02.05)
Постановление Правительства Российской Федерации от 30.12.2003 г. № 794 "О единой государственной системе предупреждения и ликвидации чрезвычайных ситуаций" (в ред. 03.10.06)
Постановление Правительства РФ от 2.11.2000г. № 841 "Об утверждении Положения об организации обучения населения в области ГО" с изменениями, внесенными Постановлениями Правительства РФ от 15.08.2006г. № 501 и от 22.10.2008г. №770 "О внесении изменений в Положение об организации обучения населения в области ГО, утвержденное Постановлением Правительства РФ от 2.11.2000г. №841"
6.2 Организация и проведение аварийно-спасательных и других неотложных работ (АСДНР)
Согласно Положению о гражданских организациях гражданской обороны (постановление Правительства РФ от 10.16.99 г. № 620) формирования ГО (в дальнейшем - формирования) на предприятии ТАТнефтьЭнергосервис создаются для проведения аварийно-спасательных и других неотложных работ и первоочередного жизнеобеспечения работающему персоналу, пострадавшему при ведении военных действий или вследствие этих действий, а также для участия в борьбе с пожарами, в обнаружении и обозначении районов, подвергшихся радиоактивному, химическому, биологическому и иному заражению, обеззараживанию населения, техники, зданий и территорий, срочном восстановлении функционирования необходимых коммунальных служб и других объектов жизнеобеспечения.
Аварийно-спасательные и другие неотложные работы (АСДНР) в очагах ядерного, химического и биологического поражения будут проводиться в сложной обстановке, в условиях полных и сильных разрушений, сплошных завалов, пожаров, заражения атмосферы и местности и возможного затопления.
АСДНР проводятся с целью: спасения людей и оказания помощи пораженным, локализации аварий и устранения повреждений, препятствующих проведению спасательных работ, создания условий для проведения восстановительных работ. Для организации более эффективного управления проведением АСДНР с учетом их характера и объема, рационального использования имеющихся сил и средств на территории объекта определяются места работ, учитывая особенности территории объекта, характер планировки и застройки, расположение защитных сооружений и технологических коммуникаций, а также транспортных магистралей. Аварийно-спасательные и другие неотложные работы имеют различное содержание, но проводятся, как правило, одновременно.
Содержание спасательных работ: ведение разведки маршрутов выдвижения формирований и участков (объектов) работ; локализация и тушение пожаров на участках (объектах) проведения работ и на путях выхода к ним; розыск пораженных и извлечение их из завалов, поврежденных и горящих зданий, загазованных и задымленных помещений; вскрытие разрушенных, поврежденных, заваленных защитных сооружений и спасение находящихся в них людей, а также подача воздуха в заваленные защитные сооружения, оказание первой медицинской и первой врачебной помощи пораженным людям и эвакуация их в лечебные учреждения; вывод населения из опасных мест (сильно зараженных и затапливаемых районов) в безопасные (менее зараженные) или не зараженные районы; санитарная обработка людей и обеззараживание их одежды, территории, сооружений и техники.
Содержание аварийно-спасательных и других неотложных работ: прокладка колонных путей и устройство проездов в завалах и на зараженных участках; локализация аварий на газовых, энергетических и других сетях; укрепление или обрушение конструкций зданий и сооружений, угрожающих обвалом, препятствующих безопасному движению и проведению спасательных работ; восстановление и ремонт поврежденных защитных сооружений для защиты людей от возможных повторных ядерных ударов противника.
АСДНР организуют в минимально короткие сроки и проводят непрерывно днем и ночью, в любую погоду, до полного их завершения. Это требует от начальника ГО, штаба, служб и формирований высокой организованности, а от личного состава высокой морально - психологической стойкости, физической выносливости и мобилизации всех сил.
Успешное проведение аварийно-спасательных и других неотложных работ достигается: своевременной организацией и непрерывным ведением разведки; созданием группировки сил и средств, быстрым их выдвижением на участок (объект) работ; морально-психологической и политической подготовкой личного состава органов управления и формирований; активным участием населения в проведении спасательных работ и умением оказывать первую медицинскую помощь пораженным; умелым руководством со стороны начальников штабов и служб ГО деятельностью подчиненных при организации и проведении АСДНР; организацией и поддержанием непрерывного взаимодействия органов управления, формирований и других сил и средств, привлекаемых к аварийно-спасаьны и другим неотложным работам.
Группировка сил и средств ГО для организованного проведения АСДНР создается в мирное время решением начальника ГО района. Состав и построение группировки уточняются при угрозе нападения противника, а также после нанесения ядерных ударов в соответствии со сложившейся обстановкой, наличием и состоянием сохранившихся сил и средств и объемом работ в очагах поражения.
В группировку сил включаются объектовые и территориальные формирования городских и сельских районов, а также воинские части ГО. Она может состоять из формирований первого эшелона, второго эшелона и резерва. Формирования, входящие в состав эшелонов, распределяются по сменам с соблюдением целостности их организационной структуры и производственного принципа. Состав эшелонов; количество и состав смен определяются исходя из конкретной обстановки сложившейся в очагах поражения, а также наличия сил и средств.
В период приведения ГО в готовность начальник, штаб и службы ГС объекта проводят мероприятия, предусмотренные планом. По распоряжению старшего начальника ГО организуют вывод формирования в загородную зону, в заранее установленные районы расположения. В загородной зоне формирования располагаются в населенных пунктах или на местности, имеющей естественные укрытия. В районе расположения сохраняются организационная структура и целостность формирований; обеспечиваются надежная защита личного состава и техники от воздействия оружия массового поражения, удобство размещения и отдыха благоприятные санитарно-эпидемические условия. Создаются условия для быстрого сбора формирований, подготавливаются пути для выдвижения формирований к объектам работ. В районе расположения организуется наблюдение за зараженностью внешней среды и всестороннее обеспечение.
Штаб и службы ГО объекта организуют управление подчиненными и взаимодействующими формированиями, анализируют полученные и поступающие данные об обстановке, производят расчеты возможного объема спасательных и неотложных аварийно-восстановительных работ и определяют необходимое количество сил и средств для их выполнения. Своевременно доводят все распоряжения и задачи до формирований, оказывают необходимую помощь и осуществляют контроль за их выполнением. Информируют вышестоящий штаб о создавшейся обстановке и ее изменениях, а также действиях сил и средств объекта. Начальник ГО и командиры формирований перед началом спасательных работ устанавливают наиболее целесообразные приемы и способы выполнения работ, определяют порядок использования машин и механизмов, а также других средств механизации и места их развертывания. В ходе проведения спасательных работ командиры формирований ведут разведку участков (объектов) работ, уточняют объем работ и последовательность их проведения, приемы и способы спасения людей из завалов и горящих зданий, защитных сооружений, способы локализации пожаров, порядок использования техники.
Устройство проездов и проходов и тушение пожаров. В первую очередь проводятся работы по устройству проездов и проходов к защитным сооружениям, поврежденным и разрушенным зданиям и сооружениям, где могут находиться пораженные люди, а также в местах аварий, препятствующих или затрудняющих проведение АСДНР.
Для устройства проездов (проходов) используются формирования механизации. Если завал местный, незначительный, проезд (проход) в нем проделывается путем расчистки проезжей части от обломков, а при сплошных завалах высотой более 1 м - проезд прокладывается по завалу. Для одностороннего движения проезд устраивается шириной 3-3,5 м, для двухстороннего - 6-6,5 м. При одностороннем движении через каждые 150- 200 м делаются разъезды протяженностью 15-20 м. Работы по прокладке проездов и проходов обычно выполняются бульдозерно – экскаваторными и краново-погрузочными звеньями. Крупноразмерные элементы удаляются, поверхность завалов разравнивается и уплотняется. Противопожарные формирования приступают к локализации и тушению пожаров. На участках (объектах) работ локализуют и тушат пожары основные силы противопожарной службы. Противопожарные формирования к участкам (объектам) работ выдвигаются одновременно с бульдозерно - экскаваторными звеньями и в первую очередь тушат и локализуют пожары там, где находятся люди (у входов в защитные сооружения, на направлениях ввода и работы формирований, на путях эвакуации пораженных людей). При необходимости часть пожарных машин может использоваться для перекачки воды из удаленных источников.
Спасение людей из разрушенных и заваленных убежищ. Поиск и спасение людей начинается сразу после ввода формирований на участок (объект) работ. Личный состав формирований разыскивает и спасает пораженных людей, разбирает завалы вручную с помощью средств малой механизации, а санитарные дружины оказывают пораженным людям первую медицинскую помощь. Подготавливаются места для установки привлекаемой техники (автокранов, экскаваторов, компрессорных станций и другой специальной техники). Командиры формирований руководят спасательными работами, ставят дополнительные задачи подчиненным и приданым формированиям. Информируют начальника ГО объекта о ходе проведения работ.
Для установления связи с укрывающимися в убежищах используются сохранившиеся средства связи, воздухозаборные отверстия (переговариваются через них); перестукиваются через двери, стены, трубы водоснабжения и отопления.
Убедившись в том, что в убежище находятся люди, а входы, выходы и оголовки убежища завалены, принимается решение о спасении людей. В первую очередь в убежище подается воздух. Для подачи воздуха в убежище расчищают воздухозаборные каналы или проделывают отверстия в стене или перекрытии и подают воздух компрессорами.
Для спасения людей из заваленных убежищ и укрытий последние необходимо вскрывать. Способы вскрытий определяет командир формирования, в зависимости от типа и конструкции убежища, а также характера завала над ним. Способы вскрытия убежищ и укрытий: разборка завала над основным входом с последующим открыванием двери или вырезкой в ней отверстия откопка оголовка или люка аварийного выхода, устройство проемов в стенах убежищ из подземной галереи; разборка завала у наружной стены здания с последующей откопкой приямка в грунте и пробивкой проема в стене убежища, пробивка проема в стене убежища из соседнего примыкающего к нему помещения, разборка завала над перекрытием убежища с последующей пробивкой в нем проема для вывода людей. Убежище может вскрываться несколькими способами. Главное - спасти людей в минимально короткое время имеющимися силами и средствами.
Для обеспечения успешного проведения работ по вскрытию заваленного защитного сооружения необходимо проделать проходы в завалах к основным входам или люкам (оголовкам) аварийных выходов, разобрать над ними завалы, сделать проходы к ограждающим конструкциям убежищ, отрыть приямки, пробить проемы (отверстия) в стенах и перекрытиях.
В тех случаях, когда убежище не имеет аварийного выхода, а приямок сильно и высоко завален, вскрывать убежище рекомендуется через перекрытие и в местах, где завал имеет наименьшую высоту. Для этого необходимо разобрать завал у стены, после чего отрыть приямок в грунте, пробить проем в стене и через проем вывести людей из убежища. При вскрытии защитных сооружений рекомендуется широко использовать машины и различные механизмы. Так, при пробивке проемов в стенах защитных сооружений используются механические, пневматические, электрические или ручные инструменты. Личный состав, работающий на откапывании и вскрытии защитных сооружений, вооружается электро- и газосварочными аппаратами, керосинорезами, огнетушителями и другим инструментом. В том случае, когда не будет машин или доступ их к защитным сооружениям затруднен, заваленные защитные сооружения откапываются и вскрываются вручную.
Обследовать необходимо весь участок (объект) работ. Очень важно установить связь с людьми путем переговоров или перестукиванием и выяснить их количество и состояние.
В поврежденных зданиях поиск людей следует начинать с осмотра здания, оценки его состояния, обращая внимание на наружные стены, балконы, карнизы, лестничные клетки и площадки. Многоэтажные здания необходимо начинать осматривать с нижних этажей: осмотреть внутренние стены, столбы, перегородки, определить местонахождение людей и возможные способы их эвакуации из здания. Принять необходимые меры для укрепления поврежденных конструкций.
Большую опасность для людей представляют горящие здания. Их следует обследовать быстро с соблюдением мер безопасности. Двери в задымленные помещения открывать осторожно, через сильно задымленное здание продвигаться ползком, использовать изолирующий или фильтрующий противогаз с дополнительным патроном Людей рекомендуется разыскивать путем оклика. Места нахождения людей обозначать специальными или изготовленными из подручных материалов знаками.
Перед началом работ по извлечению пораженных людей из-под завалов необходимо осмотреть завал, выбрать к нему подход, устранить возможные обрушения отдельных конструкций зданий, а также потушить тлеющие и горящие обломки разрушенных зданий, так как при горении выделяется окись углерода, что может привести к отравлению людей. Способы извлечения людей из-под завалов определяет командир формирования в зависимости от высоты и состояния завалов, наименьшей трудности и безопасности при его разборке, а также места нахождения и состояния людей в завале. Для извлечения людей из-под завалов могут применяться такие способы, как разборка завала сверху, устройство проходов (галерей), проделывание проемов в стене.
Людей, находящихся в верхних слоях завала, спасают разборкой завала сверху.
Разборку проводят осторожно и так, чтобы не было осадок и перемещения обрушенных элементов конструкций. Людей освобождают от обломков, мусора, других деталей зданий, не причиняя им дополнительных повреждений. В первую очередь освобождают голову, грудь, плечи, ноги, оказывают первую медицинскую помощь и выносят (выводят) из опасной зоны.
Если люди находятся под завалами около или внутри здания, то проделывают к ним проходы. Проходы устраивают в первую очередь у одной из боковых стен и там, где есть пустоты между обрушившимися элементами зданий. В начале проход делают небольшим, а потом его расширяют до размеров, необходимых для освобождения пострадавших людей. Устройство проходов между крупными глыбами опасно и возможно в том случае, когда глыбы держатся прочно, не проваливаются и не опрокидываются. Проход на всем пути укрепляется стойками и распорками. Вынос пораженных людей через устроенный проход может осуществляться различными способами: на руках, плащах, брезенте, пленке, одеяле, волоком и другими способами. Людям оказывается первая медицинская помощь, и они сосредоточиваются в безопасных районах.
Для извлечения людей, находящихся в пристенных пространствах разрушенных зданий, целесообразно проводить проделывание проема в стене здания. Вначале расчищают завал у наружной стены, а при необходимости и отрывают приямок в грунте. После этого в стене пробивают проем размером 0,8 х 0,8м и через этот проделанный проем выносят (выводят) людей, оказывают им первую медицинскую помощь и направляют в безопасную зону.
Для этого привлекаются формирования водопроводно-канализационных сетей, аварийно-газо-технические, аварийно-технические по электросетям. В состав формирований входят звенья по водопроводным, канализационным, тепловым, электрическим, газовым, сантехническим сетям. Они привлекаются к аварийным работам в соответствии с их предназначением. При ликвидации аварий на коммунально-энергетических сетях могут использоваться для выполнения подсобных работ формирования общего назначения.
Неотложные аварийно-восстановительные работы в первую очередь проводятся в местах аварий, препятствующих проведению спасательных работ и угрожающих жизни людей (затопление, загазованность, возникновение пожаров). Успешному проведению неотложных аварийно-восстановительных работ будет способствовать заблаговременное составление плана объекта, на котором указываются места нахождения коммунально-энергетических сетей и направления движения воды, газа и специальных продуктов, по трубопроводам, места расположения смотровых колодцев и камер с регулировочной аппаратурой, а также не заваливаемые ориентиры, к которым привязываются колодцы, насосные станции, скважины и другие важные элементы коммунально-энергетических сетей.
Основной способ локализации аварий и повреждений на коммунально-энергетических и технологических сетях - отключение разрушенных участков и стояков в зданиях. С этой целью используются задвижки в сохранившихся смотровых колодцах и запорные вентили в подвалах. На объект вода подается из городской магистрали или глубоких скважин повысительной насосной станции (водонапорной башни), создаваемой на объекте. Водопроводные трубы, как правило, заглубляются в грунт на 1,7-2,5 м (ниже глубины промерзания). Для удобства их эксплуатации и обслуживания на линии через каждые 50- 100 м устраиваются смотровые колодцы, в которых размещаются регулировочная арматура и пожарные гидранты. Повреждения и аварии в сети водоснабжения могут привести к затоплению подвальных помещений, используемых как убежища, противорадиационные укрытия, склады, помещения для размещения различного технического оборудования, а также затруднить или сделать невозможным тушение пожаров. Особенно большая опасность может возникнуть при сохранении напора воды в водопроводной сети.
На объектах, где сохранилась водопроводная сеть, разбирают завалы под колодцами, в которых установлены пожарные гидранты, с тем чтобы получать воду для тушения пожаров. Для восстановления водоснабжения объекта в первую очередь используются запасные и водонапорные резервуары.
Аварии на электросетях устраняются только после их обесточивания. Для этого отключается распределительная сеть электроснабжения или ее отдельные участки. Распределительные пункты устраиваются обычно в каждом здании и предназначаются для отключения отдельных потребителей или участков сети. Выключаются рубильники на вводах в здания, разъединяются предохранители, перерезаются провода подводящей сети. При первой возможности поврежденные провода изолируются, убираются с земли и подвешиваются к временным опорам. На воздушных электролиниях заземление производится с обеих сторон от места работ на ближайших опорах, в подземных кабелях - с обеих сторон от места разрушения кабеля на ближайших трансформаторных пунктах и с помощью переносного заземления. Такие работы предупредят возникновение пожаров, исключат поражение людей током и создадут благоприятные условия для восстановительных работ.
Восстановление поврежденных отдельных участков воздушных линий производится путем соединения проводов или прокладки новых линий. Поврежденные участки кабельных линий соединяются временной воздушной линией или прокладкой соединительного кабеля на поверхности земли.
Укрепление или обрушение конструкций зданий и сооружений, угрожающих обвалом. Во время проведения АСДНР необходимо исключить возможную опасность обрушения поврежденных конструкций зданий и сооружений на проезжую часть улиц или на вскрываемые защитные сооружения. С этой целью здания и сооружения, грозящие обвалом, обрушают или временно укрепляют. Обрушают неустойчивые угрожающие обвалом части здания с помощью лебедки и троса или трактором. Длина троса должна быть не менее двух высот обрушиваемой конструкции, на которой его закрепляют. По команде командира формирования натягивают трос лебедкой и обрушивают конструкцию. Обрушивать неустойчивые конструкции зданий возможно также подрывным способом.
Стены высотой до 6 м крепятся установкой простых деревянных или металлических подкосов под углом 45- 60° к горизонту. Стены здания высотой 6-9 м укрепляются двойными подкосами, которые устанавливают в каждом простенке здания. Для крепления могут использоваться металлические и деревянные балки, брусья, доски, бревна (элементы разрушенных зданий и конструкций).
Для проведения спасательных работ в первую очередь привлекаются: санитарные дружины, сводные отряды (команды, группы), команды (группы) обеззараживания, формирования механизации. При постановке задач указываются:
- санитарным дружинам и спасательным формированиям - участки и места работ; выделяемый транспорт; порядок оказания первой медицинской помощи, выноса и погрузки пораженных на транспорт, эвакуации их из очага химического поражения;
- сводным отрядам (командам) и формированиям ПР и ПХЗ - средства усиления, участки спасательных работ и места устранения аварий на коммуникациях с АХОВ, дегазации местности и сооружений;
- командам (группам) обеззараживания-средства усиления, участки местности и объекты, подлежащие дегазации; порядок и способы дегазации; пункты приготовления дегазирующих растворов и зарядки машин; время начала и окончания работ;
- формированиям механизации - участки (места) устройства заградительных валов, канав, ограничивающих растекание АХОВ, время начала и конца работ.
Помимо этого, всем формированиям указываются: места забора воды для санитарно-технических нужд, пункты специальной обработки; пункт сбора и порядок действий после выполнения задачи.
Командиры формирований после получения задачи на проведение спасательных работ в очаге химического поражения ставят задачи командирам подразделений и вводят с учетом обстановки формирования в очаг поражения.
| Эксплуатационные скважины для освоения месторождений Западной Сибири | |
|
Содержание Реферат Введение 1. Общая и геологическая часть 1.1 Географо-экономическая характеристика района работ 1.2 Геологические условия 1.3 ... Скважина оборудуется фильтрами для очистки воды, в обвязку скважины входит водопровод диаметром 0,05 м и длиной 60 м. Поражение электрическим током - возможно из-за доступности прикосновения к токоведущим частям, отсутствия защитного заземления, не применения защитных средств при обслуживании ... |
Раздел: Рефераты по геологии Тип: дипломная работа |
| Компенсация реактивной мощности в системах электроснабжения с ... | |
|
СОДЕРЖАНИЕ Введение 1. Исследование методов и устройств компенсации реактивной мощности при электроснабжении нелинейных и резкопеременных нагрузок 1.1 ... В регулятор статического компенсатора, состоящего из конденсаторной батареи и реактора, управляемого тиристорами, содержащий датчики тока нагрузки, датчики напряжения питающей сети ... Область применения защитного разделения сетей - электроустановки напряжением до 1000В, эксплуатация которых связана с повышенной степенью опасности, в частности передвижные ... |
Раздел: Рефераты по физике Тип: дипломная работа |
| Реконструкция подстанции "Гежская" 110/6 кВ | |
|
Аннотация Данный дипломный проект посвящен реконструкции подстанции "Гежская" 110/6 кВ, находящейся в Соликамском районе ОАО "Березниковских ... В интегрированных цифровых комплексах РЗА появляется возможность перехода к новым нетрадиционным измерительным преобразователям тока и напряжения - на основе оптоэлектронных ... Рабочее заземление сети - это соединение с землёй некоторых точек сети (обычно нейтрали обмоток части силовых трансформаторов и генераторов, реакторы поперечной компенсации в ... |
Раздел: Рефераты по физике Тип: дипломная работа |
| Испытательная станция турбовинтовых двигателей ТВ3-117 ВМА-СБМ1 ... | |
|
Міністерство освіти і науки України Запорізький національний технічний університет ПОЯСНЮВАЛЬНА ЗАПИСКА ДО ДИПЛОМНОГО ПРОЕКТУ ВИПРОБУВАЛЬНА СТАНЦІЯ ... Установка двигателя на стенд, подсоединение коммуникаций, необходимых датчиков и котрольно-измерительной аппаратуры должны производиться в соответствии с утвержденными инструкциями ... Для обеспечения запуска двигателя в боксе смонтированы элементы системы запуска - влагоотстойник, фильтр и электропечь подогрева воздуха, поступающего от городской магистрали, и ... |
Раздел: Промышленность, производство Тип: дипломная работа |
| Цифровая защита фидеров контактной сети постоянного тока ЦЗАФ-3,3 кВ ... | |
|
Министерство транспорта Российской Федерации Федеральное агентство железнодорожного транспорта Государственное образовательное учреждение высшего ... Сигналы от датчиков тока и напряжения поступают на БЗА в модуль контроллера защит (МКЗ), где осуществляется измерение тока и напряжения и вычисления производных параметров ... После включения заземляющих ножей и установки переносных заземлений и вывешивания на приводах разъединителей и выключателей нагрузки переносных плакатов "Заземлено" в закрытых ... |
Раздел: Рефераты по физике Тип: дипломная работа |