Курсовая работа: Управляемость автомобиля. Параметры маневра
Белгородский Государственный Технологический Университет
им. В.Г.Шухова
Кафедра «Организация и безопасность движения»
Курсовая работа по дисциплине
«Безопасность транспортных средств»
На тему
«Управляемость автомобиля. Параметры маневра»
Выполнила
студентка гр.БД-43
Боровая Ю.В
Проверил
Новописный Е.А
Белгород 2010г.
ВВЕДЕНИЕ
Под управляемостью понимают способность автомобиля сохранять или изменять направление движения точно в соответствии с приложенными воздействиями. Для сохранения прямолинейного движения управляемые колеса автомобиля и ось подвески устанавливаются под некоторыми углами, что обеспечивает стабилизацию передних колес (возврат в нейтральное положение) при случайных отклонениях после выхода из поворота.
На управляемость автомобиля определенное влияние оказывают некоторые эксплуатационные факторы. Например, снижение давления воздуха в шинах высокого давления увеличивает угол увода, а в широкопрофильных — уменьшает. Радиальные шины лучше противостоят уводу, чем диагональные. Поэтому при установке, к примеру, сзади радиальных шин, а впереди диагональных недостаточная поворачиваемость автомобиля увеличивается, и наоборот.
Повышение нагрузки на ось уменьшает величину увода колес, поэтому опытные водители проходят поворот с небольшим ускорением. Это приводит к увеличению нагрузки на заднюю ось, повышается сцепление задних колес с дорогой, автомобиль более устойчив на поворотах. Тормозить же на повороте не следует, резко возрастает опасность заноса.
Под маневренностью понимается способность автомобиля выполнять разворот на возможно малой площади. Маневренность автомобиля зависит от его габаритных размеров, величины колесной базы, ширины колеи, предельных углов поворота передних колес. Основной параметр, характеризующий маневренность автомобиля — его минимальный радиус поворота. Легковые автомобили обладают лучшей маневренностью (радиус поворота меньше 6 м) по сравнению с грузовыми, и требуют гораздо меньше площади для маневрирования и разворотов. Автопоезда, наоборот, требуют больше места для маневрирования, чем одиночные автомобили.
1 УПРАВЛЯЕМОСТЬ
1.1 Поворот автомобиля
Управляемость автомобиля — одно из важнейших эксплуатационных свойств, определяющих возможность его безопасного движения с большими средними скоростями, особенно на дорогах с интенсивным движением.
Основными параметрами, характеризующими поворот автомобиля, являются радиус поворота и положение центра поворота.
На рисунке 1.1 представлена схема поворота автомобиля с жесткими и эластичными колесами. Точка О представляет собой центр поворота. Она находится на пересечении перпендикуляров, проведенных к векторам скоростей всех колес (мостов) автомобиля. Радиус поворота R (Rэ) представляет собой расстояние от центра поворота до продольной оси автомобиля. Для автомобиля с жесткими колесами (рисунок 1.1), у которого векторы скоростей колес совпадают с плоскостью их вращения, центр поворота лежит на продолжении оси задних колес, а радиус поворота (из ∆ОАБ)
![]() (1)
(1)
где L — база автомобиля; θ — угол поворота управляемых колес.
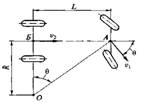
Рисунок 1.1 Схема поворота автомобиля с жесткими колесами:О — центр поворота; А, Б — центры осей передних и задних колес; v1, v2 — векторы скоростей передних и задних колес
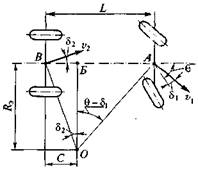
Рисунок 1.2. Схема поворота автомобиля с эластичными колесами:
О — центр поворота; А, В — центры осей передних и задних колес;
С — расстояние между центром В оси задних колес и точкой Б — проекцией центра поворота на продольную ось автомобиля; v1, v2 — векторы скоростей передних и задних колес
Следовательно, радиус поворота автомобиля R с жесткими колесами зависит только от угла поворота управляемых колес.
Для автомобиля с эластичными колесами (рисунок 1.2), векторы скоростей которых не совпадают с плоскостью их вращения, центр поворота находится на некотором расстоянии С от оси задних колес, а радиус поворота (из ∆ОАБ и ∆ОБВ)
![]() (2)
(2)
где δ1,δ2 — углы увода передних и задних колес (мостов).
Таким образом, радиус поворота автомобиля с эластичными колесами зависит от угла поворота управляемых колес и углов увода передних и задних колес, обусловленных их эластичностью при действии боковой силы.
С учетом радиуса поворота R3 находим расстояние С (из ∆ОБВ):
![]() (3)
(3)
Следовательно, положение центра поворота автомобиля с эластичными колесами зависит от угла поворота управляемых колес и углов увода передних и задних колес (мостов).
В технической характеристике автомобиля указывается наименьший радиус поворота по колее переднего наружного колеса. Этот радиус определяется экспериментально при максимальном повороте управляемых колес.
Радиус поворота автомобиля по колее переднего наружного колеса можно определить по следующей формуле:
![]() (4)
(4)
где В – колея передних колес[1].
1.2 Силы, действующие автомобиль при повороте
Процесс движения автомобиля на повороте включает в себя три фазы (рисунок 1.3, а): вход в поворот (участок АБ), поворот (БВ) и выход из него (ВГ).
При входе в поворот управляемые колеса двигавшегося прямолинейно автомобиля поворачиваются, и он движется по кривой уменьшающегося радиуса.
При повороте управляемые колеса повернуты на определенный угол, и движение происходит по кривой постоянного радиуса.
При выходе из поворота управляемые колеса возвращаются в нейтральное положение, и автомобиль движется по кривой увеличивающегося радиуса, а затем — прямолинейно.
Во время движения на повороте на автомобиль (рисунок 1.3, б) действуют следующие силы: центробежная рц и ее поперечная ру и продольная рх составляющие, а также поперечные реакции дороги: Ry1 — на передний и Ry2 — на задний мосты.
Основной действующей силой при повороте является поперечная составляющая ру центробежной силы, которая направлена перпендикулярно продольной оси автомобиля и представляет собой сумму трех сил:
![]() (5)
(5)
Сила P’у всегда возникает при криволинейном движении. Она пропорциональна квадрату скорости и действует в процессе всего поворота. Сила P’’у появляется в результате изменения угла поворота управляемых колес и действует при входе и выходе из поворота. Сила P’’’у возникает вследствие изменения скорости движения и действует только при неравномерном движении на повороте. Из трех указанных составляющих наибольшее значение имеет сила P’у, на долю которой приходится 90 % силы Pу. Поэтому для автомобилей общего назначения и специализированных автомобилей силами P’у и P’’у пренебрегают.
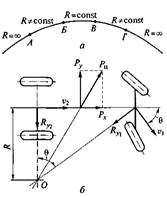
Рисунок 1.3. Поворот автомобиля:
а — фазы процесса попорота; б — силы, действующие при повороте;
А – Г — характерные точки траектории поворота автомобиля;
v1, v2 — векторы скоростей передних и задних колес
Их учитывают только для специальных автомобилей (пожарные, автомобили «скорой помощи» и др.), движущихся на поворотах с более высокими скоростями.
При равномерном движении на повороте поперечная составляющая центробежной силы
![]() (6)
(6)
Она пропорциональна квадрату скорости движения, поэтому быстро возрастает при увеличении скорости.
Поперечные реакции дороги на передний и задний мосты при равномерном движении на повороте
![]() (7,8)
(7,8)
Из этих выражений следует, что центробежные силы, действующие на передний и задний мосты, можно считать пропорциональными приходящемуся на них весу G1, и G2[1].
2 ВЛИЯНИЕ РАЗЛИЧНЫХ ФАКТОРОВ НА УПРАВЛЯЕМОСТЬ АВТОМОБИЛЯ
2.1 Установка управляемых колес
На управляемость автомобиля оказывают влияние различные конструктивные и эксплуатационные факторы. К ним относятся установка и стабилизация управляемых колес, подвеска и шины, техническое состояние рулевого управления, блокировка колес при торможении, колебания управляемых колес, усилители рулевого управления, кузов автомобиля, квалификация водителя и др.
Для создания наименьшего сопротивления движению, уменьшения износа шин и снижения расхода топлива управляемые колеса должны катиться в вертикальных плоскостях, параллельных продольной оси автомобиля. С этой целью управляемые колеса устанавливают на автомобиле с развалом в вертикальной и со схождением в горизонтальной плоскости.
Углом развала управляемых колес ар называется угол (рисунок 2.1, а), заключенный между плоскостью колеса и вертикальной плоскостью, параллельной продольной оси автомобиля. Угол развала считается положительным, если колесо наклонено от автомобиля наружу, и отрицательным при наклоне колеса внутрь.
Угол развала необходим для того, чтобы обеспечить перпендикулярное расположение колес по отношению к поверхности дороги при деформации деталей моста под действием веса передней части автомобиля. Этот угол уменьшает плечо поворота — расстояние между точкой пересечения продолжения оси поворота (шкворня) и точкой касания колеса плоскости дороги. В результате существенно уменьшается момент, необходимый для поворота управляемых колес, и, следовательно, облегчается поворот автомобиля.
При установке колеса с развалом возникает осевая сила, прижимающая ступицу с колесом к внутреннему подшипнику, раз мер которого обычно больше, чем размер наружного подшипника. Вследствие этого разгружается наружный подшипник ступицы колеса. Угол развала обеспечивается конструкцией управляемого моста путем наклона поворотной цапфы и составляет 0...2".
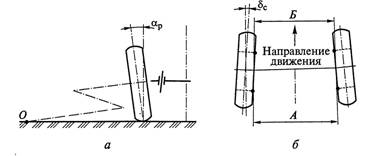
Рисунок 2.1. Схемы установки управляемых колес:
а — развал; б — схождение; О — точка пересечения продолжения оси колеса с плоскостью дороги; А, Б — расстояния между задними и передними частями колес
При наличии развала управляемое колесо стремится катиться в сторону от автомобиля по дуге вокруг точки О (рисунок 2.1, а) пересечения продолжения его оси с плоскостью дороги. Так как управляемые колеса связаны между собой, то их качение по расходящимся дугам сопровождалось бы боковым скольжением. Для предотвращения такого скольжения управляемые колеса устанавливают со схождением, т.е. не параллельно, а под некоторым углом к продольной оси автомобиля.
Угол схождения управляемых колес δС (рисунок 2.1, б) определяется разностью расстояний А и Б между колесами, которые измеряют сзади и спереди по краям ободьев на высоте оси колес. Угол схождения колес у автомобилей находится в пределах 0°20'... 1°, а разность расстояний А и Б между колесами сзади и спереди составляет 2... 12 мм.
Установка управляемых колес с одновременным развалом и схождением обеспечивает их прямолинейное качение по дороге без бокового скольжения. При этом должно быть правильно подобрано соотношение между углами развала и схождения. Каждому углу развала соответствует определенный угол схождения, при котором сопротивление движению, расход топлива и износ шин будут минимальными. Обычно оптимальный угол схождения управляемых колес составляет в среднем 15...20% угла их развала. Однако в процессе эксплуатации управляемые колеса часто устанавливают со схождением несколько большим, чем требуется для компенсации их развала. Это вызвано тем, что у колес вследствие наличия зазоров и упругости рулевого привода может появиться отрицательное схождение. В результате даже при их положительном развале возрастают сопротивление движению, расход топлива и износ шин[3].
2.2 Стабилизация управляемых колес
При движении силы, действующие на автомобиль, стремятся отклонить управляемые колеса от положения, соответствующего прямолинейному движению. Чтобы не допустить поворота управляемых колес под действием возмущающих сил (толчки от неровностей дороги, порывы ветра и др.), управляемые колеса должны обладать стабилизацией.
Стабилизацией управляемых колес называется их свойство сохранять положение, отвечающее прямолинейному движению, и автоматически возвращаться в это положение.
Чем выше стабилизация управляемых колес, тем легче управлять автомобилем, выше безопасность движения, меньше износ шин и рулевого управления.
На автомобилях стабилизация управляемых колес обеспечивается наклоном шкворня или оси поворота колес в поперечной и продольной плоскостях и упругими свойствами пневматической шины, которые создают соответственно весовой, скоростной и упругий стабилизирующие моменты.
Весовой стабилизирующий момент возникает вследствие поперечного наклона шкворня или оси поворота управляемого колеса (при бесшкворневой подвеске). Поперечный наклон оси поворота (рисунок 2.2), характеризуемый углом βш, при повороте колеса вызывает подъем передней части автомобиля на некоторую высоту h’. При этом масса передней части стремится возвратить колесо в положение прямолинейного движения. Создаваемый в данном случае стабилизирующий момент и является весовым.
Хотя весовой стабилизирующий момент меньше, чем стабилизирующий момент шины, он не зависит ни от скорости движения, ни от сцепления колеса с дорогой. У автомобилей угол поперечного наклона шкворня (оси поворота) управляемого колеса βш = 5... 10°. При увеличении угла βш повышается стабилизация управляемых колес, но затрудняется работа водителя[2].
Весовой стабилизирующий момент приближенно можно рассчитать по следующей формуле:
![]() (9)
(9)
где Gк — нагрузка на колесо; lц — длина поворотной цапфы; θ — угол поворота колеса.
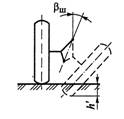
Рисунок 2.2 Поперечный наклон оси поворота управляемого колеса
Скоростной стабилизирующий момент создается в результате продольного наклона шкворня. Продольный наклон оси поворота (рисунок 2.3), определяемый углом γш, создает плечо а действия реакций дороги, возникающих при повороте колеса между шиной и дорогой в месте их касания. Эти реакции помогают возврату колеса в положение, соответствующее прямолинейному движению. Создаваемый в этом случае стабилизирующий момент и является скоростным.
Обычно боковые реакции дороги на колесах возникают вследствие действия на автомобиль центробежной силы, которая пропорциональна квадрату скорости движения на повороте. Поэтому скоростной стабилизирующий момент изменяется пропорционально квадрату скорости движения.
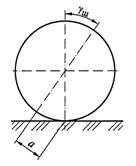
Рисунок 2.3 Продольный наклон оси поворота управляемого колеса
У автомобилей угол продольного наклона оси поворота управляемых колес уш = 0...3,5°. При увеличении угла уш повышается стабилизация управляемых колес, но усложняется работа водителя.
Скоростной стабилизирующий момент
![]() (10)
(10)
где а — плечо действия реакции дороги Ry, rк — радиус колеса; γш — угол продольного наклона шкворня.
Упругий стабилизирующий момент шины создается при повороте управляемого колеса вследствие смещения результирующей боковых сил, действующих в месте контакта шины с дорогой, относительно центра контактной площадки (рисунок 2.4).
Упругий стабилизирующий момент, создаваемый шиной:
![]() (11)
(11)
где Рб — результирующая боковых сил; b — плечо действия силы Рб.

Рисунок 2.4 Схема возникновения упругого стабилизирующего момента шины
Стабилизирующий момент шины достигает значительной величины у легковых автомобилей, которые имеют высокоэластичные шины и движутся с большой скоростью. Он может составлять 200...250Н·м при углах увода колес 4...5°. Поэтому при очень эластичных шинах угол продольного наклона шкворня делают равным нулю, чтобы не усложнять управление автомобилем. Однако при небольшой скорости движения стабилизирующий момент шины не обеспечивает надежной стабилизации управляемых колес. Кроме того, упругий стабилизирующий момент шины резко уменьшается на дорогах с небольшим коэффициентом сцепления (скользких, обледенелых).
Стабилизация управляемых колес неразрывно связана с установкой управляемых колес автомобиля[1].
2.3 Колебания управляемых колес
В процессе движения управляемые колеса автомобиля могут совершать колебания вокруг шкворней (осей поворота) в горизонтальной плоскости. Такие колебания вызывают износ шин и рулевого привода, повышают сопротивление движению и увеличивают расход топлива. Они могут привести к потере управляемости автомобиля и снижению безопасности движения. Причинами, вызывающими эти колебания, являются гироскопическая связь управляемых колес, их неуравновешенность (дисбаланс) и двойная связь колес с несущей системой (рама, кузов) через рулевой привод и подвеску.
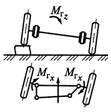
Рисунок 2.5 Схема возникновения самовозбуждающихся колебаний (автоколебаний) управляемых колес при зависимой подвеске
При наездах одного из колес на дорожные неровности при зависимой их подвеске (рисунок 2.5) происходит перекос переднего моста. Управляемые колеса наклоняются, и изменяется положение их оси вращения. Это приводит к возникновению гироскопического момента мrx, который действует в горизонтальной плоскости и поворачивает управляемые колеса вокруг шкворней[3].
Поворот колес вокруг шкворней вызывает возникновение другого гироскопического момента мrz, который действует в вертикальной плоскости и стремится увеличить перекос моста и наклон колес.
Таким образом, перекос моста обусловливает колебания управляемых колес вокруг шкворней, а они, в свою очередь, увеличивают перекос моста, т.е. обе колебательные системы связаны между собой и влияют друг на друга.
Возникающие в этом случае колебания управляемых колес вокруг шкворней непрерывно повторяются (самовозбуждаются), являются устойчивыми и наиболее опасными.
При вращении неуравновешенного колеса (рисунок 2.6) возникает центробежная сила рц. Ее вертикальная составляющая Рz стремится переместить колесо в вертикальном направлении и наклонить его, что вызывает появление гироскопического момента мх. Горизонтальная составляющая рх центробежной силы стремится повернуть колесо вокруг шкворня. Колебания управляемых колес становятся особенно значительными, когда не уравновешены оба колеса и неуравновешенные части располагаются с разных сторон осей вращения, так как в этом случае поворачивающие моменты мх складываются. Колебания также возрастают при увеличении скорости движения автомобиля в связи с тем, что значения составляющих рz и рх центробежной силы рц во многом зависят от скорости[1].
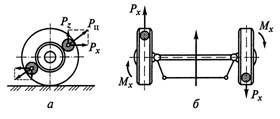
Рисунок 2.6. Дисбаланс управляемых колес:
а — силы, действующие на неуравновешенные колеса; б — схема возникновения поворачивающего момента
Управляемые колеса автомобиля имеют двойную связь с его несущей системой, которая осуществляется через подвеску и рулевой привод.
При вертикальных перемещениях колеса (рисунок 2.7) шарнир А, соединяющий продольную рулевую тягу с рычагом поворотного кулака, должен перемещаться по дуге бб с центром в точке О1, что обусловлено кинематикой рулевого привода.
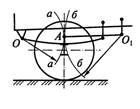
Рисунок 2.7. Связь управляемых колес с несущей системой автомобиля:
А — шарнир; О,О1 — центры колебаний; аа, бб — траектории перемещения шарнира
Кроме того, шарнир А также должен перемещаться по дуге аа с центром в точке О, что связано с особенностями кинематики подвески. Однако дуги аа и бб расходятся, поэтому вертикальные перемещения управляемых колес сопровождаются их поворотом вокруг шкворней.
Колебания управляемых колес вокруг шкворней совершаются с высокой и низкой частотой.
Колебания высокой частоты, превышающей 10Гц, с амплитудой не более 1,5...2° происходят в пределах упругости шин и рулевого привода. Эти колебания не передаются водителю и не приводят к нарушению управляемости автомобиля, так как поглощаются в рулевом управлении. Однако высокочастотные колебания вызывают дополнительный износ шин и деталей рулевого привода, повышают сопротивление движению автомобиля и увеличивают расход топлива.
Колебания низкой частоты (менее 1Гц) с амплитудой 2...3" нарушают управляемость автомобиля и безопасность движения. Для их устранения необходимо снизить скорость автомобиля.
Полностью устранить колебания управляемых колес вокруг шкворней невозможно — их можно только уменьшить. Это обеспечивается применением независимой подвески управляемых колес, что ослабляет гироскопическую связь между ними, применением балансировки колес, благодаря чему устраняется их неуравновешенность, уменьшением влияния двойной связи колес с несущей системой, что достигается принятием различных конструктивных мер[4].
2.4 Увод колес автомобиля
Уводом колеса называется его свойство катиться под углом к плоскости своего вращения вследствие действия боковой силы.
Эластичное колесо (рисунок 2.8) при отсутствии боковой силы катится в плоскости своего вращения, а при действии боковой силы — под некоторым углом.
Угол δув, образованный вектором скорости vK колеса и плоскостью его качения, называется углом увода.
На рисунке 2.9 показана зависимость угла увода колеса от приложенной к нему поперечной силы. Кривая ОАБВ включает в себя следующие характерные участки: OA — увод колеса при отсутствии бокового скольжения шины (δув= 4...6°); АБ — увод с частичным боковым проскальзыванием шины; БВ— полное скольжение шины вбок при Py = Pсц (δув = 12…15°).
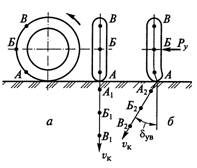
Рисунок 2.8. Качение эластичного колеса при отсутствии (а) и действии (б) боковой силы: А—В, А1—В1, А2—В2 —характерные точки колеса
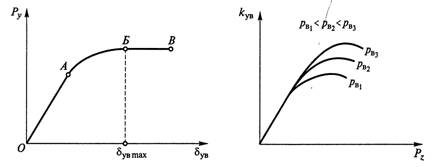
Рисунок 2.9 Зависимость угла увода колеса от поперечной силы: А—В характерные точки кривой
Рисунок 2.10 Зависимости коэффициента сопротивления уводу колеса от вертикальной нагрузки на него и давления воздуха в шине: рв1 – рв3 — значения давления воздуха в шине
Угол увода колеса можно определить по формуле
 (12)
(12)
где kув — коэффициент сопротивления уводу колеса.
Коэффициент сопротивления уводу колеса зависит от размеров и конструкции шины, давления воздуха в ней и вертикальной нагрузки на колесо. Так, при увеличении размеров шины и давления воздуха в ней коэффициент сопротивления уводу возрастает. При увеличении вертикальной нагрузки на колесо он сначала растет, а затем уменьшается (рисунок 2.10). Для шин грузовых автомобилей и автобусов значения этого коэффициента составляют 30...100кН/рад, а для шин легковых автомобилей 15...40кН/рад. От значения коэффициента сопротивления уводу во многом зависит боковое скольжение колеса. Чем меньше этот коэффициент, тем раньше начинается боковое скольжение[1].
2.5 Подвеска и шины
У легковых автомобилей ухудшение управляемости при эксплуатации может быть вызвано остаточной деформацией пружин передней независимой подвески. В результате осадки пружин рычаги подвески при перемещениях изменяют углы развала колес и поперечного наклона шкворней, нарушая при этом установку и стабилизацию управляемых колес. К тому же при осадке одной из пружин подвески указанные углы изменяются только с одной стороны автомобиля. Вследствие этого стабилизирующие моменты на управляемых колесах не будут уравновешиваться при прямолинейном движении и автомобиль начнет уводить в сторону. При уменьшении Давления воздуха в одной из шин колес автомобиля увеличивается ее сопротивление качению и снижается боковая жесткость шины, в связи с этим автомобиль при движении постоянно отклоняется в сторону шины с уменьшенным давлением воздуха[1].
2.6 Блокировка колес при торможении
При торможении автомобиля одновременная блокировка (доведение до юза) передних и задних колес может произойти только на дорогах с определенным оптимальным коэффициентом сцепления φопт = 0,4...0,45. На дорогах с другими значениями коэффициента сцепления происходит блокировка сначала либо передних, либо задних колес. Так, при торможении на дорогах с коэффициентом сцепления меньше оптимального (φх < φопт) у автомобиля первыми блокируются передние управляемые колеса. Это может привести к потере управляемости автомобиля. При торможении на дорогах с коэффициентом сцепления больше оптимального (φх > φопт) у автомобиля первыми доводятся до юза задние ведущие колеса, что может привести к заносу[1].
2.7 Усилители рулевого управления
В рулевых управлениях автомобилей применяют гидравлические, пневматические и электрические усилители. Среди них наибольшее распространение получили гидроусилители. Так, 90% всех автомобилей с усилителями рулевого управления оборудованы гидравлическими усилителями.
Гидроусилитель значительно облегчает работу водителя, который при его наличии прикладывает к рулевому колесу в 2 — 3 раза меньшее усилие, чем без гидроусилителя. Так, например, для поворота автомобиля средней и большой грузоподъемности и автобусов без рулевых усилителей требуется усилие водителя до 400Н и более. Это очень существенно, так как из всей затрачиваемой водителем энергии на управление автомобилем 50% приходится на рулевое управление. Кроме того, гидроусилитель смягчает толчки и удары от дорожных неровностей, передаваемые от управляемых колес на рулевое колесо. Гидроусилитель также повышает безопасность движения при повреждении шин управляемых колес (прокол, разрыв и т.п.) и маневренность автомобиля.
Маневренность автомобиля возрастает при быстром и точном действии гидроусилителя. Так, время срабатывания гидроусилителей составляет 0,2...2,4с (у пневмоусилителей оно в 5 —10 раз больше). Это приводит к высокой точности при управлении автомобилем в процессе поворота на закруглениях дорог[4].
2.8 Кузов автомобиля
Форма кузова легковых автомобилей оказывает существенное влияние на их управляемость, так как она определяет метацентр автомобиля — точку приложения боковой аэродинамической силы Рб (силы ветра). У автомобилей метацентр обычно не совпадает с их центром тяжести. Так, у одних автомобилей метацентр расположен перед центром тяжести, а у других — за ним.
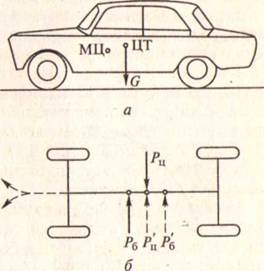
Если метацентр находится перед центром тяжести автомобиля, то при действии бокового ветра двигавшийся прямолинейно автомобиль начнет поворачиваться в направлении действия силы ветра. Это вызовет появление центробежной силы рц (рисунок 2.11), под влиянием которой увеличится склонность автомобиля к повороту.
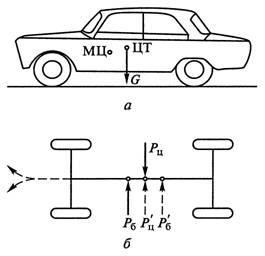
Рис. 8.14. Влияние формы кузова на управляемость автомобиля:
а — расположение метацентра автомобиля; б — схема сил, действующих при боковом ветре; МЦ — метацентр; ЦТ — центр тяжести
Если метацентр находится за центром тяжести автомобиля, то при действии бокового ветра Рб' автомобиль будет стремиться повернуть против ветра. Возникающая при этом центробежная сила Р’ц будет способствовать уменьшению поворота автомобиля.
Таким образом, для обеспечения лучшей управляемости автомобиля при действии бокового ветра необходимо, чтобы метацентр располагался за центром тяжести автомобиля.
Это может быть достигнуто соответствующей формой кузова автомобиля, например с пониженным капотом двигателя, высокими задними крыльями и др[1].
2.9 Квалификация водителя
Управляемость автомобиля и точность выполнения маневра во многом зависят от квалификации водителя.
Управление автомобилем на повороте представляет собой сложный процесс, состоящий из нескольких фаз: вход автомобиля в поворот, его поворот и выход из поворота.
При управлении автомобилем водители, не имеющие достаточного опыта, часто допускают ошибки: выводят автомобиль за осевую линию дороги, за пределы занимаемого ряда и срезают углы при маневрировании. Все подобные действия приводят к нарушению не только управляемости автомобиля, но и безопасности движения[4].
3 МАНЕВРЕННОСТЬ
3.1 Параметры маневра
Автомобили должны обладать хорошей маневренностью. Она требуется при значительном изменении направления движения в условиях города, когда часто приходится совершать повороты на 90°, при необходимости в движении задним ходом или полном развороте. Высокая маневренность также необходима при погрузке и разгрузке автомобилей на небольших площадках.
Маневренность характеризует удобство использования автомобиля и легкость управления им при необходимости движения и выполнения поворотов и разворотов в стесненных условиях, а также проходимость автомобиля при движении по грунтовым дорогам с крутыми поворотами, по пересеченной местности и через лес. От маневренности автомобилей зависят размеры необходимых площадок в местах погрузки и выгрузки, а иногда и затраты времени на выполнение этих операций, требуемая ширина проездов в гаражах, на площадках для стоянки и в зонах обслуживания[3].
Основными параметрами маневра автомобиля (рисунок 3.1) являются минимальный радиус поворота Rmin, внутренний RB и наружный Rн габаритные радиусы поворота, минимальный радиус поворота внутреннего заднего колеса Rвк, поворотная ширина bк по колее колес и поворотная ширина bк автомобиля (коридора).
Минимальный радиус поворота автомобиля представляет собой расстояние от центра поворота до оси колеи переднего наружного управляемого колеса при максимальном угле его поворота.
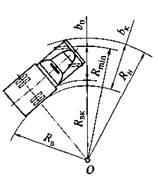
Рисунок 3.1. Показатели маневренности автомобиля:
О — центр поворота
Минимальный радиус поворота, м, указывается в технической характеристике автомобиля. Его можно вычислить по формуле
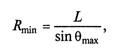 (13)
(13)
где L — база автомобиля; θmах — максимальный угол поворота наружного колеса (рисунок 3.2, а).
Внутренним и наружным габаритными радиусами поворота (RB и RH) называются расстояния от центра поворота до ближайшей и наиболее удаленной точек автомобиля при максимальном повороте управляемых колес.
Поворотная ширина по колее колес — это разность между минимальными радиусами поворота переднего наружного и заднего внутреннего колеса
![]() (14)
(14)
Поворотная ширина по колее колес автомобиля определяет минимально необходимую ширину проезжей части твердого покрытия дороги.
Поворотной шириной автомобиля (коридора) называется разность между наружным и внутренним габаритными радиусами поворота автомобиля:
![]() (15)
(15)
Поворотная ширина коридора определяет минимальную ширину проезда или ширину полосы движения, необходимую при крутых поворотах, а также возможность движения в проездах заданных размеров и формы[1].
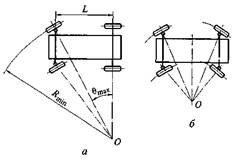
Рисунок 3.2 Схемы автомобилей с передними (а) и всеми (б) управляемыми колесами: О — центр поворота
4 РАСЧЕТНАЯ ЧАСТЬ
Данный раздел содержит в себе расчеты показателей управляемости и маневренности автомобиля ВАЗ-21093. Для выполнения расчетов мне потребовались некоторые технические характеристики автомобиля Ваз-2109, представленные в таблице 1.
Таблица 1
| Колесная база автомобиля (L) | 2460мм |
| Передняя колея (В) | 1400мм |
| Максимальный угол поворота передних колес (θ) | 42° |
Ниже будут рассчитаны следующие характеристики:
· Радиус поворота с эластичными колесами (Rэ)
· Расстояние между центром оси задних колес и проекцией центра поворота на продольную ось автомобиля (С)
· Радиус поворота автомобиля по колее переднего наружного колеса (RПК)
· Минимальный радиус поворота (Rmin)
Радиус поворота вычисляется, с расчетом, что в реальных условиях на автомобиле установлены эластичные колеса, то есть используем формулу (2):
![]()
Угол увода при отсутствии бокового скольжения, то есть в условиях повседневной эксплуатации составляет от 4° до 6°.Так как углы увода на передних и задних колесах различны, причем, так как автомобиль переднеприводный, угол увода передних колес меньше, чем задних, значит принимаем δ1= 4°, δ2=6°. Отсюда получаем:
![]()
Расстояние между центром оси задних колес и проекцией центра поворота на продольную ось автомобиля рассчитывается по формуле (3):
![]()
Радиус поворота автомобиля по колее переднего наружного колеса можно вычислить по формуле (4)
![]()
Минимальный радиус поворота рассчитывается по формуле (13)
![]()
ЗАКЛЮЧЕНИЕ
В результате проделанной работы был произведен расчет показателей управляемости и маневренности автомобиля ВАЗ-21093.
Рассчитав различные радиусы поворота данного автомобиля можно сделать вывод, что они достаточны для эксплуатации машины на дорогах общего пользования, но полученные данные можно улучшить за счет усовершенствования рулевого управления автомобиля и конструкции поворотных механизмов колес.
Такими улучшениями могут служить гидро- или электро-усилитель руля, которые позволят водителю уменьшить время, затрачиваемое на поворот колес, а также изменение конструкции поворотных рычагов колеса или обеспечение конструкцией наклона колеса в сторону поворота, что также значительно уменьшит радиус поворота.
Приведенные улучшения могут значительно увеличить управляемость и маневренность данного автомобиля.
СПИСОК ЛИТЕРАТУРЫ
1. Вахламов В.К. «Автомобили: Эксплуатационные свойства»: Учебник для студ. высш. учеб. заведений.-М.: Издательский центр «Академия», 2005.
2. Кравец В. Н. «Теория автомобиля»: учеб. Пособие / В. Н. Кравец. Нижний Новгород: НГТУ, – 2007.
3. Вахламов В.К. «Конструкция, расчет и эксплуатационные свойства автомобилей»:Учеб. пособие для студ. высш. учеб. заведений / В. К. Вахламов. — М. : Издательский центр «Академия», 2007.
4. Федотов А.И., Зарщиков А.М. «Конструкция, расчет и потребительские свойства автомобилей»:Учебное пособие. Иркутск, 2007.
| Особенности эксплуатации автомобильных шин | |
|
... Государственный Технический Университет (ВолгГТУ) Кафедра "ТЭРА" Спецкурс технической эксплуатации автомобилей Курсовая работа "Особенности ... Особенно вредное влияние оказывает дисбаланс передних колес легковых автомобилей, ухудшая управляемость автомобиля. Для обеспечения безопасности движения не рекомендуется устанавливать шины с отремонтированными местными повреждениями на колеса передних осей автомобилей. |
Раздел: Рефераты по транспорту Тип: курсовая работа |
| ... изготовления дублирующего устройства управления учебным автомобилем | |
|
Министерство образования и науки Российской Федерации Тульский государственный педагогический университет им. Л. Н. Толстого Кафедра машиноведения и ... Состояние ходовой части автомобиля определяют внешним осмотром деталей подвески, дисков, колес и шин, проверкой осевого люфта подшипников колес, углов установки передних колес. Если угол увода зaдней оcи больше, чем у передней, то автомобиль при том же угле поворота управляемых колес движется по кривой меньшего радиуса. |
Раздел: Рефераты по транспорту Тип: реферат |
| Модернизация подвески автомобиля ЗАЗ1102 Таврия | |
|
СОДЕРЖАНИЕ Введение и постановка задачи Условные обозначения 1 Требования к подвеске 2 Подвеска на направляющих пружинах и амортизационных стойках 2.1 ... - Угол продольного наклона оси поворота ѭ = 3o обеспечивает возврат управляемых колес в нейтральное положение при повороте. Перед выездом на линию, водитель проверяет техническую исправность автомобиля: отсутствие подтекания топлива, масла, воды, а у газобаллонных автомобилей герметичность газовой ... |
Раздел: Рефераты по транспорту Тип: дипломная работа |
| Проект легкового автомобиля, грузоподъемностью 4 человека ... | |
|
Введение Цель курсового проекта - закрепить знания по дисциплине "Автомобили", приобрести навыки выполнения тягового расчёта автомобиля, научиться ... Давление на опорную поверхность ро колёс каждой оси принимают ро=рш (рш- давление воздуха в шине). ро = 1,6 кгс/см2 и po = 1,8 кгс/см2 для передней и задней оси соответственно. 7.- график зависимости критических скоростей автомобиля по условиям управляемости от угла поворота управляемых колёс. |
Раздел: Рефераты по транспорту Тип: курсовая работа |
| Проект рулевого управления автомобилем | |
|
Введение С каждым годом автомобильное движение на дорогах России неуклонно возрастает. В таких условиях важнейшее значение приобретает конструкция ... Рулевой привод служит для передачи усилия от рулевого механизма (редуктора) к управляемым колесам автомобиля и для обеспечения необходимого соотношения между углами их поворота. Согласно первому, при ходах отбоя и сжатия подвески не должно происходить поворота управляемых колес; согласно второму, более совершенному, конструктор сознательно задает закон ... |
Раздел: Промышленность, производство Тип: дипломная работа |