Изложение: Опір матеріалів: інженерні методи розрахунків
1. Предмет і завдання опору матеріалів
Інженерам будь якої спеціальності необхідно створювати надійні споруди, машини і прилади. Надійними прийнято вважати такі конструкції, які є достатньо міцними, достатньо жорсткими та достатньо стійкими. Міцність – здатність чинити опір не руйнуючись. Жорсткість – здатність деформуватися в заданих межах. Стійкість – здатність зберігати початкову форму рівноваги. Таким чином, опір матеріалів – наука про інженерні методи розрахунків на міцність, жорсткість, стійкість. ОМ – розділ механіки твердого тіла, який опирається на знання фізики, математики і теор. мех. і є основою для спец дисциплін. Н-д теорії машин і мех-мів, теорія споруд, деталі машин, спец машини і прилади і т д. Об’єктом вивчення в ОМ є реальне тверде тіло, що здатне деформуватись, тобто змінювати форму і розміри під навантаженням.
2. Сили та деформації
В ОМ сили поділяються на 2 класи:
· Зовнішні
· внутрішні
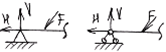
Зовнішні – результат дії інших тіл на дане тіло. Зовнішні сили поділяються на:
♦ поверхневі - прикладені до поверхні тіла. В свою чергу вони поділ на:
- зосередженні (Н)
- розподілені по поверхні або вздовж лінії (Н/м)
- За площею (Н/м2)
- Об’ємні (Н/м3) - сила гравітації, електромагнітна дія, теплова дія.
♦ об’ємні - прикладені до кожної частки тіла.
♦ постійні
♦ тимчасові – за х-ром дії
♦ статистичні – при яких відсутні пришвидшення точок
♦ динамічні – при яких виникають значні пришвидшення точок тіла, внаслідок чого є додаткові сили інерції, які необхідно враховувати.
Внутрішні – в ОМ розглядаються тільки ті внутр сили, які виникають внаслідок навантаження, їх називають силами опору.
Існує 4 простих деформації:
1. розтяг або стиск
2. зсув
3. кручення
4. згин
Розтяг або стиск стрижня спричиняється силами, що діють вздовж його осі. Зсув – коли на тіло діють поперечні сили. Кручення – спричинюється парами сил, площини дії яких перпендикулярні до осі стрижня. Коли присутній крутний момент Т. Згин – вісь балки деформується в площині, що збігається з силовою. Присутні згинаючі моменти.
3. Реальне деформоване тіло та його модель
В ОМ реальне тверде тіло моделюють з допомогою наступних гіпотез:
◄ Матеріал суцільний і однорідний
◄ Матеріал ізотропний (ізо – однаковий, тропія - властивості) – має однакові властивості в усіх напрямках. Але є й анізотропні матеріали: дерево, залізобетон, бетон.
◄ Матеріал ідеально пружний – повністю відновлює форму і розміри після навантаження.
◄ М-л підкоряється законові Гука (існують винятки)
◄ Гіпотеза плоских перерізів – перерізи, що є плоскими і нормальними до осі до деформації залишаються такими і після деформації.
Якщо справедливими є гіпотез 4 і 5 то це дозволяє застосовувати принцип незалежності дії сили (результат дії суми сил може визначатися як сума результатів дії кожної сили окремо).
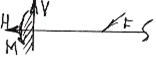
4. Внутрішні сили. Метод перерізів
Внутрішні сили – в ОМ розглядаються тільки ті внутр сили, які виникають внаслідок навантаження, їх називають силами опору. Внутрішні сили визначають методом перерізів. Розглянемо сис-му відліку. Помістимо в ній тверде тіло.
Внутрішні сили можуть бути визначеними з умов рівноваги залишеної частини тіла.
Σx = 0; Σy = 0;Σz = 0;
Σmx = 0; Σmy = 0; Σmz = 0.
Якщо цієї умови достатньо для визначення внутр сил, то такі задачі назив. статично визначеними. Якщо ж цієї умови недостатньо, то такі зад назив. статично невизнач. і розв’язують спец методами.
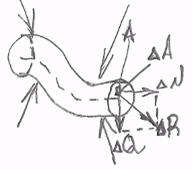 |
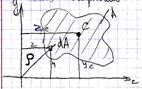
5. Напруга – міра інтенсивності внутр сил. Деформації в точці навантаженого тала
∆А – невелика площина
∆R – рівнодійна внутр сил на даній площині
Якщо ∆R/∆А то ми знайдемо середню напругу: ∆R/∆А = Pm [Па] – сер мех. напруга на площині ∆А
lim∆А→0∆R/∆А = P – мех. напруга в точці навантаження тіла (повна)
∆N – нормальна складова внутр сили
∆Q – дотична складова внутр сили
lim∆А→0∆N/∆А = σ – нормальна напруга
lim∆А→0∆Q/∆А = τ – дотична напруга
Р2 = σ2 + τ2 – зв’язок між напругами
Поділ напруг на нормальну і дотичну має глибокий фізичний зміст, кожна з цих напруг спричиняє свій х-тер руйнування:
σ – руйнування відривом
τ – руйнування зсувом або зрізом
6. Поняття про основні конструктивні форми. Вади простих деформацій бруса
Основними конструктивними формами є:
Брус - тіло у якого поперечні розміри і довжина відрізняються на порядок. Вони бувають криволінійні, прямолінійні, сталого попер перер.
Пластина – тіло обмежене 2-ма площинами на близькій відстані одна від одної.
Оболонка – тіло обмежене 2-ма криволінійними поверхнями на близькій відстані одна від одної. Вони бувають сферичними, циліндричними, конічними.
Масив – тіло що має всі розміри одного порядку. До таких відносять: основи та фундаменти, греблі, підпорні стіни та ін..
Існує 4 простих деформації бруса:
5. розтяг або стиск
6. зсув
7. кручення
8. згин
Розтяг або стиск стрижня спричиняється силами, що діють вздовж його осі. Зсув – коли на тіло діють поперечні сили. Кручення – спричинюється парами сил, площини дії яких перпендикулярні до осі стрижня. Коли присутній крутний момент Т. Згин – вісь балки деформується в площині, що збігається з силовою. Присутні згинні моменти.
7. Механічні х-тики будівельних матеріалів. Діаграми розтягу і стиску
Міцність м-лу залежить від його фізичної природи, отже виникає потреба визначити деякі числові х-ки міцності та пластичності м-лів, такі х-ки визначають експериментально. Числові х-ки міцності та практичності називають механічними х-ками і визначають випробовуючи спец зразки на спец лаб обладнанні. Стандартні зразки на розтяг: циліндричний та призматичний. Стандартні зразки на стиск: циліндри та куби. Такі зразки випробовують на спец випробовувальних машинах з гідравлічним або механічним принципом дії. Випробовування виконують при статичному навантаженні зразка.
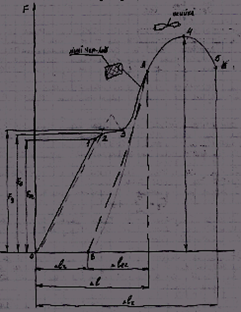
Точка 1 відповідає границі пропорційності м-лу. Границею пропорційності є відношення:
σpr = Fpr /A0
A0 – початкова площа поперечного перерізу.
σpr – границя пропорційності – це така найбільша нормальна напруга, до якої спостерігається прямо пропорційна залежність між силою та подовженням.
На ділянці 0-1 має місце лише пружна деформація матеріалу. На ділянці 1-2 починається відхилення від прямо пропорційної залежності. Т 2 відповідає границі пружності матеріалу і визначається за ф-лою: σe = Fe/Ao
Границя пружності – це така найб нормальна напруга при якій залишкова деформація не перевищує нормативного значення (0,001-0,05%). На ділянці 1-2 спостерігається нормативна залишкова деформація. Ділянка 2-3 називається площиною текучості матеріалу. Т 3 відповідає границі текучості матеріалу, яка визначається за ф-лою:
σy = Fy/Ao
Границя текучості – це така найб норм напруга при якій ріст деформації відбувається без помітного затрачання сили. Ділянка 3-4 відповідає так званому зміцненню матеріалу, що відбувається за рахунок так званого „внутрішнього тертя”. Т 4 відповідає границі міцності матеріалу
σu = Fu/Ao
σu – границя міцності матеріалу – найб норм напруга до руйнування.
8. Метод розрахунків в ОМ. Основні види задач ОМ
Статично невизначена задача визначення силового стану конструкції розв’язують розглядаючи 4 сторони задачі:
1 – статична сторона задачі: складають всі можливі рівняння рівноваги.
2 – геометрична сторона задачі: складають додатково до рівнянь рівноваги, так звані рівняння сумісності деформацій розглядаючи здеформований стан конструкції в цілому.
3 – фізична сторона задачі: на основі закону Гука та закону лінійного теплового розширення виражають зусилля через деформацію, або навпаки.
4 – синтез: розв’язують сумісно статичні, фізичні та геометричні р-ня.
 |
9. Деформація розтягу та стиску: поздовжня сила, напруга, з-н Гука, коеф Пуассона
В поперечному перерізі стрижня виникає нормальна напруга σ, яка рівномірно розподілена в площині цього перерізу, а отже може визначатися за формулою:
σ = N/A [Па] (1)
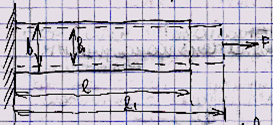
l1 – l = ∆l (2) - абсолютне подовження
b1 – b = ∆b (3) - абсолютне звуження
∆l/ l = ε (4) – відносне подовження
∆b/ b = ε'(5) – відносне звуження
|ε'/ ε| = ν (6) – коеф Пуассона
ν – є фізичною константою даного матеріалу.
Між напругою та деформацією існує фізичний зв’язок за законом Гука
σ = Е*ε (7)
Е – модуль Юнга(модуль пружності)
Е = [Па] – фізична константа матеріалу
Підставимо 1 і 4 в 7 і одержимо
∆l = Nl/EA
EA – жорсткість при розтязі, стиску.
10. Розрахунок на міцність при розтязі, стиску. Врахування власної ваги бруса при розтязі та стиску, брус рівного опору
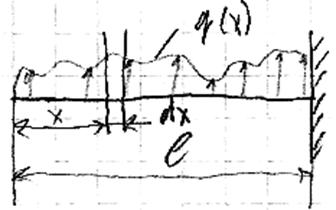
При великих довжині та густині матеріалу необхідно враховувати вплив власної ваги стрижня на напругу та деформацію. Це стосується таких конструкцій як фундаменти, під будівлі та обладнання, греблі ... Розглянемо стрижень під дією зовн сил і власної ваги. Визначимо нормальну напругу в поперечних перерізах стрижня враховуючи його вагу. За методом перерізів (Q(x) - вага)
N(x) = + F + Q(x) = F + ρgAx
Визначимо напругу в тому ж перерізі:
σ(x) = N(x)/A = F/A + ρgx
Якщо F = 0, то σ(x) = ρgx – напруга лише від власної ваги. Аналізуючи цю формулу зауважимо, що напруга залежить від матеріалу, довжини і не залежить выд площі. Подовження від власної ваги визначають за ф-лою:
∆l = Ql/2EA
∆l = Nl/EA – з-н Гука
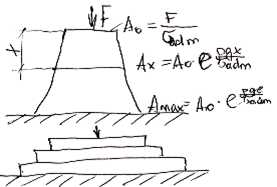 |
Отже подовження від власної ваги є в 2 рази меншим ніж від такої ж за величиною зовнішньої сили. Для заощадження матеріалу при значному впливі власної ваги треба створювати брус рівного опору. Тобто такий, в якому напруга в усіх перерізах однакова і рівна допустимій. Практична реалізація такого стрижня складна, і тому практично реалізовуються ступінчаті стрижні.
11. Статично невизначені стрижневі сис-ми та метод визначення зусиль у таких сис-мах
Статично невизначеними називають сис-ми, силові фактори в елементах яких тільки з рівнянь рівноваги визначити не можна. У таких сис-мах зв’язків більше ніж потрібно для рівноваги.
Статично невизначена задача визначення силового стану конструкції розв’язують розглядаючи 4 сторони задачі:
1 – статична сторона задачі: складають всі можливі рівняння рівноваги.
2 – геометрична сторона задачі: складають додатково до рівнянь рівноваги, так звані рівняння сумісності деформацій розглядаючи здеформований стан конструкції в цілому.
3 – фізична сторона задачі: на основі закону Гука та закону лінійного теплового розширення виражають зусилля через деформацію, або навпаки.
4 – синтез: розв’язують сумісно статичні, фізичні та геометричні р-ня.
12. Основні властивості статично невизначених сис-м. Початкові та температурні зусилля
Основні в-ті стат невизначених сис-м:
◄ Розподілення зусиль між стрижнями статично невизначеної конструкції залежить від відношення жорсткостей цих стрижнів та від геометрії будови самої конструкції.
◄ Більше зусилля виникає в тому стрижні, що має більшу жорсткість.
◄ Відношення жорсткостей може мати нескінченну к-ть значень, тобто у стат невизначених конструкціях може мати місце нескінченна к-ть варіантів розподілу зусиль.
Із останньої властивості випливає можливість оптимізації розподілу зусиль у стат невизн конструкціях: необхідно знайти таку конструкцію, яка задовольняє умови міцності, жорсткості та стійкостіі є оптимальною за витратами матеріалу, коштів, енергоресурсів, тобто за зведеними витратами.
Початкові зусилля – це зусилля, що виникають до прикладання корисного навантаження. При прикладанні корисних напружень виникає наступний перерозподіл сил: 1-ша група елементів ще більше напружується, але при цьому інша зазнає розвантаження.
При в елементах стат невизн конструкцій виникає так звана температурна напруга. Внаслідок зміни температури стрижня на ∆t непіддатливі опори будуть реагувати на розширення стрижня тобто виникнуть р-ції R1 i R2. Температурна напруга залежить лише від матеріалу і зміни температури, але не залежить від поперечного перерізу.
13. Поняття про статичний момент плоского перерізу. Визначення центра мас складеної плоскої фігури.
Нехай маємо довільну сис-му координат. За аналогією з моментом сили відносно осі можемо записати вирази:
dSz = y*dA (1)
dSy = z*dA
Sz = ∫AydA
Sy = ∫AzdA (2)
Sz i Sy – статичні моменти плоского перерізу відносно осей координат.
Нехай т С є центром мас попер перер , yc, zc – координати центра мас.
Sz = ycА
Sy = zcА (3)
yc = Sz/А
zc = Sy/А (4)
Враховуючи, що інтеграл за всією площею рівний сумі інтегралів за окремими її складовими, що має n частин:
 (5)
(5)
простим перерізом вважається такий в якого відомо положення центра мас (Ο, ∆, □, прокатні профілі, кутик, швелер, двотавр). Будь який складений переріз має у своєму складі декілька простих перерізів. Для будь якого складеного перерізу ф-лу 4 можна записати у вигляді
 (6)
(6)
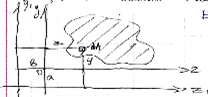
14. Моменти інерції плоскої фігури. Моменти інерції простих перерізів
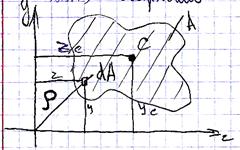 |
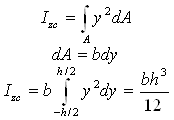
Використовуючи рисунок запишемо вирази:
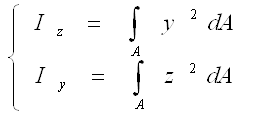 [м4]
[м4]
- осьові моменти інерції плоского перерізу.
І
> 0 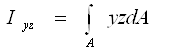 [м4]
[м4]
- відцентровий момент інерції
Iyz > 0; Iyz < 0; Iyz = 0. Iyz = 0 в тому випадку коли хоча б одна з осей є віссю симетрії перерізу, а також відносно головних осей.
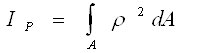
- полярний момент інерції.
Якщо співпадають початки координат у полярній та Декартові сис-мах то ρ2 = z2+y2
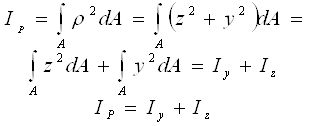
Отже, полярний момент інерції рівний сумі осьових моментів інерції.
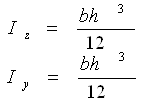
а) прямокутний
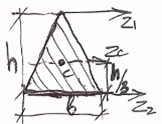 |

б) трикутний
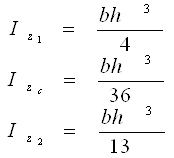
в) круглий

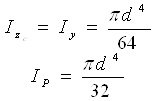
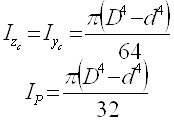
г) кругле кільце
Моменти інерції прокатних профілів див у табл. сортаменту.
 |
15. Залежність між моментами інерції при паралельному перенесенні осей
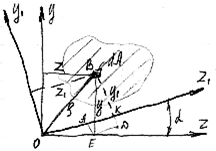
В результаті паралельного зміщення сис-ми координат, координати елементарної площинки dA перетворяться наступним чином
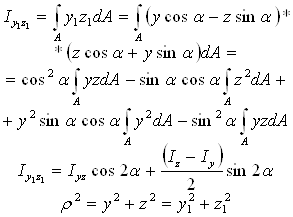
Визначимо моменти інерції відносно осей y1 i z1
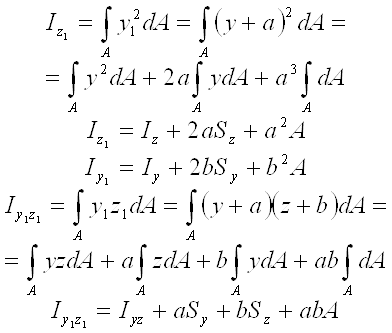
Найчастіше розгул задачі про паралельне перенесення центральних осей. В такому випадку SZc = 0;SYc = 0 а ф-ли 1, 2, 3 набувають вигляду
Аналізуючи 4 зауважуємо, що найменше значення моменти інерції мають відносно центральних осей. Віддаляючи паралельно вісь від центральної осі спостерігаємо суттєве збільшення момента інерції на величину а2А.
 |
16. Залежність між моментами інерції при повороті осей
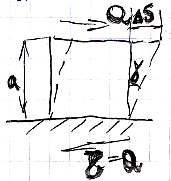
Повернемо вправо Декартову сис-му координат в додатному напрямі на деякий кут α. В новій сис-мі координат z1 i y1. Змінились координати:
Z1 = | OA | + | ED | = zcosα + ysinα (1)
Y1 = | BD | - | AE | =ycosα – zsinα (2)
1 і 2 – є відомими ф-лами перетворення координат при повороті сис-ми відліку. Визначимо моменти інерції перерізу в новій сис-мі координат.
а) осьові моменти інерції:
б) відцентрові моменти інерції
Таким чином, можна зробити висновок, що при повороті сис-ми координат сума моментів інерції залишається сталою і рівною полярному моменту інерції відносно початку координат. Тобто:
Iy + Iz = Iy1 + Iz1 = IP
17. Головні центральні осі та головні моменти інерції
Головними осями інерції називаються такі осі відносно яких моменти інерції набувають екстремальних значень. Головні осі, що проходять через центр мас поперечного перерізу називають головними центральними осями. Визначимо положення головних центральних осей:
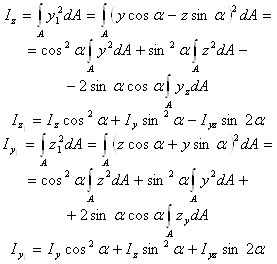
Дослідимо ф-лу
![]()
на екстремум, як Iz1 = f(α)
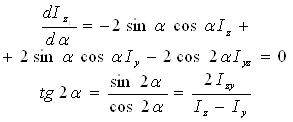
З ф-ли 3 визначаємо 2 значення α0: власне α0 і α0 + 90º. Тобто при Iz = екстремуму і Iy має максимальне значення. При Iz = Іexstr і Iy = Іexstr(4).
Головні осі, зазвичай, позначають спеціальними символами u та v. Порівнявши 1 і 2 можна зауважити, що Іuv = 0. Таким чином, відносно головних осей відцентровий момент інерції = 0. Ф-ла 4 – є необхідною умовою екстремуму осьових моментів інерції. Знаючи положення головних осей можна найкращим чином орієнтувати переріз стосовно навантаження, щоб отримати найбільший опір.
 |
18. Розрахунки на міцність при зсуві. Закон Гука при зсуві
Зсув – виникає тоді коли при дії поперечних сил відбувається паралельне зміщення сусідніх поперечних перерізів при незмінній відстані між ними. ∆S – абсолютний зсув. γ – доволі малий кут згідно гіпотези малих деформацій
 (1)
(1)
При зсуві в межах пружності матеріалу виконується з-н Гука, який можна записати наступним чином
τ = Gγ (2)
τ – дотична напруга в площині зсуву, при рівномірному розподілі цієї напруги в площині зсуву її можна визначати за ф-лою
τ = Q/A (3)
G – модуль зсуву.
Врахувавши
1 і 3, 2 можна представити у вигляді:![]() (4)
(4)
GA – жорсткість при зсуві.
Умова міцності при зсуві має вигляд:
 (5)
(5)
τadm – допустима дотична напруга.
19. Розрахунки на міцність заклепочних та зварних з’єднань
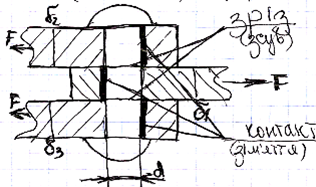
В такому з’єднанні площина зрізу буде визначатися за ф-лою:
n3 – к-ть площин зрізу однієї заклепки.
n – к-ть заклепок.
Тоді умова міцності для такого з’єднання матиме вигляд:
Найчастіше із ф-ли 3 визначають d або n.
Крім міцності на зріз таке з’єднання повинно мати міцність на зім’яття. Вважають, що площа контакту:
![]()
d – діаметр
![]() - найменша
сума товщин з’єднувальних деталей, що зсуваються в один бік.
- найменша
сума товщин з’єднувальних деталей, що зсуваються в один бік.
Умова міцності матиме вигляд:

Після підстановки в 5 ← 4 отримаємо:
Заклепки повинні одночасно задовольняти обидві умови міцності 3 і 6.
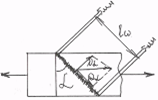 Зварне з’єднання
розглянемо на прикладі стикового зварного з’єднання двох пластинок певної
товщини за допомогою електро або газозварювання:
Зварне з’єднання
розглянемо на прикладі стикового зварного з’єднання двох пластинок певної
товщини за допомогою електро або газозварювання:
lp = lw + 10мм (7)
lp – проектна довжина шва
10мм – технологічна поправка на „непровар”.
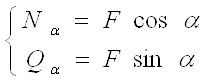 (8)
(8)
Nα – створює нормальну напругу в шві
Qα – створює дотичну напругу в шві
Тобто зварний шов працює на розтяг та зріз. Умови міцності матимуть вигляд:
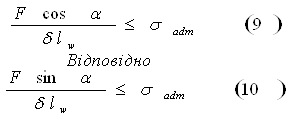
Міцний шов повинен задовольняти одночасно 2 умови.
20. Згин прямого бруса в головній площині. Типи балок, опори та опорні реакції
Брус, що працює на згин називається балкою. Якщо навантаження на балку лежить в головній площині інерції, то балка зігнута. Такий згин називається прямим або плоским. Балки можуть опиратися на:
- шарнірно рухома опора
![]() - шарнірно-нерухома опора
- шарнірно-нерухома опора
 - жорстке защеплення
- жорстке защеплення
Опорні реакції можуть визначатись їз загальних умов рівноваги, якщо балка є статично визначена, або за спеціальними методами розкривання статичної невизначеності, якщо балка стат невизн. Основні типи статично визначених балок:
- консоль
 - двохопорна статично
визначена балка
- двохопорна статично
визначена балка
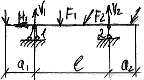 - багато опорні балки з
проміжними шарнірами
- багато опорні балки з
проміжними шарнірами
Для таких балок крім р-нь рівноваги можна також складати додаткове р-ня:
![]()
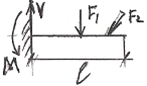
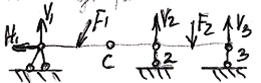
21. Побудова епюр згинних моментів та поперечних сил. (П-д побудови)
Визначають опорні реакції із умов рівноваги балки.
Q(x) = 0
M(x) = +M0
0 = x = l
Q(x) = +F
M(x) = -Fx
M(0) = 0
M(l) = -Fl

0 = x = l
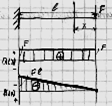
Q(x) = +qx
Q(0) = 0
Q(l) =ql
![]()

M(0) = 0
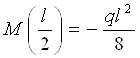
0 = x = l
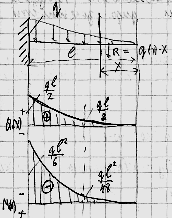
Q(0) = 0

22. Диференціальні залежності Журавського при згині та їх застосування для контролю побудови епюр Q(x) та M(x)
Складемо умови рівноваги внутр і зовн сил
Σx = 0 Qy + qdx - Qy – dQy = 0

- перша похідна Qy по х = інтенсивності розподілу сили. Σmc = 0;
-Mz + Mz + dMz – Qxdx – dQY0.5dx = 0
![]()
Використовуючи властивості похідних функції однієї залежності можна сформулювати наступні правила контролю:
Якщо q = 0 то Qy = const
Якщо q = const то Qy = лінійна ф-я
Якщо q = лінійні ф-я то Qy = квадратна парабола
Якщо Qy = 0 то Mz = const
Якщо Qy= лінійні ф-я то Mz= квадр парабола
Якщо Qy= const то Mz = лін ф-я
Якщо Qny то Mn+1z
Якщо q ↑ 0 то Qy ↑ ф-я
Якщо Qy ↓ 0 то Mz ↓
23. Нормальна напруга при згині
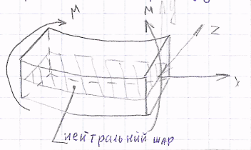
Розглянемо чистий згин балки прямокутного поперечного перерізу.
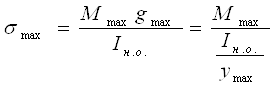
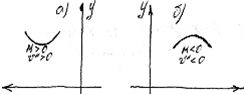
Із рис бачимо, що при М > 0 верхня частина волокон стискується, нижня – розтягується. Є шар волокон довжина яких не змінюється, такий шар називається нейтральним. Лінія перетину нейтрального шару з площиною поперечного перерізу і до і після деформації – пряма лінія. Таким чином результатом дії згинного моменту є нормальна напруга розтягу чи стиску. Цю нормальну напругу визначають за ф-лою Нав’є:
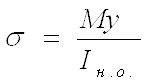
σ - нормальна напруга в довільній точці довільного перерізу балки.
М – згинний момент в даному перерізі балки
y - відстань від н.о. до т К в якій визначають напр. σ
Ін.о. – мом інерції перерізу балки відносно нейтральної осі.
Аналізуючи цю ф-лу зауважимо, що σ є ф-єю від y, бо М = const, Iн.о.= const, σ = f(y) – лінійна залежність.
σ = σmax при y = ymax . Отже найб σ завжди ивникає в точках найб віддалених від н.о.
σ = σmin = 0 ; y = 0
В точках, що належать н.о. нормальна напруга 0. З ф-ли яку ми розглядали нормальна напруга не змінюється за шириною перерізу. Отже, графік залежності σ = f(y) можна будувати в плоскому зображенні. Такий графік називається епюрою розподілу напруг. Визначимо
Якщо балка має сталий попер перер.


24. Дотична напруга при згині
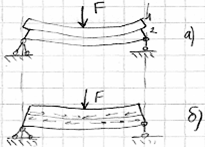
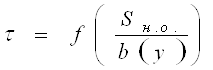
Рис б підтверджує, що в площині дотику обох скріплених балок виникає дотична напруга. Отже така напруга виникає і в суцільній. За законом парності дот напруг така напруга виникає і в попер перер. Цю ж напругу визначають за ф-лою Журавського.

τ – дотична напруга в довільній точці, довільного перер балки.
Q – поперечна сила в даному перерізі
Sвн.о. – статичний момент відносно центральної осі тієї частини перерізу, що лежить над точкою К
Sвн.о. = Авус
b(y) – ширина перерізу на рівні т.К
Ін.о. – момент перерізу балки відносно н.о. Із розглянутої вище ф-ли випливає, що
τ = τmax при y = 0
Отже найб дот напруга виникає в т , що лежить на н.о.
τ = τmin при y = ymax
Отже в т найбільш віддаленій від н.о. дотична напруга = 0.
τ – є сталим за шириною перерізу
25. Р-ки на міцність при згині. Раціональна форма поперечного перерізу балки
Міцна балка повинна одночасно задовольнити 2 умови:
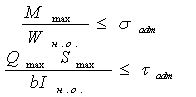
Qmax – максимальна поперечна сила з епюри
Smax – статистичний момент частинки перерізу над н.о.
b – ширина перерізу на рівні н.о.
Із цих умов можна розв’язувати всі три типи задач ОМ.
Якщо проаналізувати епюру розподілу напруг, то можна зауважити, що в районі н.о. балка недонапружена. Отже матеріал потрібно переміщувати як найдалі від н.о. В цьому випадку найб раціональним перерізом є двотавр.
26. Напружений і здеформований стан у точці навантаженого тіла. Види напруженого стану
Напружений стан за своєю природою не може залежати від сис-ми координат тобто є інваріантним. Тому його описують не тільки компонентами тензора
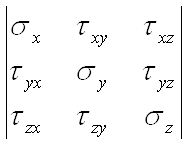 ,
,
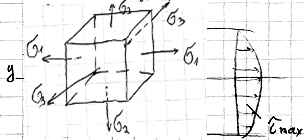
але й напругами, що не залежать від сис-ми відліку. Такі напруги називаються інваріантами напруженого стану. Теорією пружності доведено, що через будь яку точку завжди можна провести 3 взаємно перпендик площинки на яких буде відсутня дотична напруга. Такі площинки називаються головними. Нормальну напругу, що виникає в цих площинах називають головною напругою. В залежності від наявності головних напруг розрізняють наступні види напруженого стану:
- об’ємний напружений стан
тристороннього
розтягу. Н-д в точці
контакту колеса з
рейкою, кулі з
обоймою.
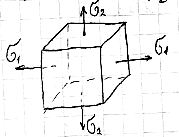
- плоский напружений стан двостороннього розтягу
Н-д в стінці
резервуара, що
знаходиться під
дією внутр тиску
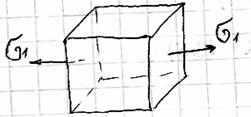
- Лінійний напружений стан
Н-д розтяг,
Стиск
27. Закон парності дотичних напружень
Дотичні напруги на двох взаємно перпендикулярних площинах рівні за величиною і обернені за напрямком. Закон парності дотичних напружень має загальний характер і діє завжди, коли в точці навантаженого тіла з будь яких причин виникає дотична напруга.
28. Напруга в нахилених площинах при лінійному напруженому стані
 Розглянемо напружений
стан звичайного центрального розтягу.
Розглянемо напружений
стан звичайного центрального розтягу.
А – площина попер перер
Аα – площина нахиленого перер
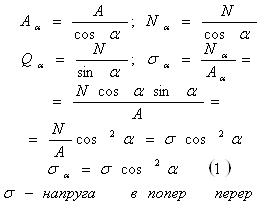
Дослідимо 1 і 2 на екстремуми
σα = σmax = σ при α = 0
Отже, найб норм напруга виникає в попер перер.
σα = σmin = σ при α = 90º
в поздовжніх перерізах стрижнів прямолінійна напруга відсутня, тобто поздовжні волокна матеріалу не натикуються одне на одне
τα = τmax = σ/2 при α = 45º
τα = τmin = 0 при α = 0
Тобто в поперечних перерізах дотична напруга відсутня, отже попер перер є головною площиною.
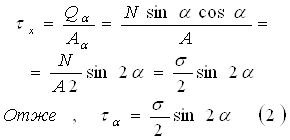
 29. Напруга в нахилених
площинах при плоскому напруженому стані.
29. Напруга в нахилених
площинах при плоскому напруженому стані.
Розгляне плоский напружений стан двостороннього розтягу. Визначимо σα τα використавши принцип незалежності дії сил і ф-ли:
Дослідимо 3 на екстремуми
Звідси випливає, що τ = 0 тобто найб норм напруга виникає в тих площинках де немає дотичної напруги, тобто в головних площинах.

31. Кручення прямого круглого стержня. Розрахунки на міцність та жорсткість при крученні
Брус, що працює на кручення називається валом. При чистому крученні в поперечному перерізі вала виникає лише крутний момент Т. Його визначають методом перерізів, згідно з яким, крутний момент = алгебраїчній сумі зовнішніх зкручуючих моментів на один бік від перерізу. Графік залежності Т(х) називають епюрою згинних моментів.
Надійні вали повинні одночасно задовольняти 2 умови:
а) Умову міцності:
2 – умова міцності для ділянки вала
Умова міцності для всього вала:

з допомогою 2 і 3 р-нь можна розв’язати всі три типи задач ОМ.
б) Умову міцності:
θadm – допустиме значення відносного кута закручування.
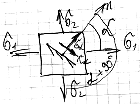
32. Головні напруги при згині. Повна перевірка міцності балок
Визначимо головні напруги τ1 τ3 використавши графічну побудову Мора.
 Виконуємо цю побудову для
т. 4, якщо σх = σ; σy = 0; τyx = τxy = τ.
Визначимо σ1 σ3 α - ? Т.А враховує
напружений стан на боковій вертикальній грані. Т.В зображує напружений стан на
горизонтальній грані. АВ – є діаметром круга Мора. Т.С є центром круга Мора. ДЕ
точки, що зображують напружений стан на головних площинах, де τ = 0.
Визначимо σ1 і σ3 використавши виконану
побудову
Виконуємо цю побудову для
т. 4, якщо σх = σ; σy = 0; τyx = τxy = τ.
Визначимо σ1 σ3 α - ? Т.А враховує
напружений стан на боковій вертикальній грані. Т.В зображує напружений стан на
горизонтальній грані. АВ – є діаметром круга Мора. Т.С є центром круга Мора. ДЕ
точки, що зображують напружений стан на головних площинах, де τ = 0.
Визначимо σ1 і σ3 використавши виконану
побудову
Узагальнюючи 1 і 2 можна записати у вигляді:

Обов’язковою умовою є, що σ1 > 0; σ3 > 0.
Із побудови Мора можна визначити не тільки величину головних напруг, але й їх напрямки. Напрям головної напруги σ1 збігається з з напрямком променя ЕА, що складає кут α з віссю σ. Визначимо кут α:
Головна площина зорієнтована під кутом 90º до напряму σ1.
Повна перевірка міцності балок:
1) Повинна задовольнятись умова міцності за нормальними напругами в найб віддалених від н.о. точках, того перерізу, де виникає найб згинний момент.
2) Повинна виконуватися умова за дотичними напругами в точках, що належать н.о. того перерізу в якому виникає найб попер сила
3) Повинна виконуватися умова міцності за вибраною теорією міцності в точках де
різко змінюється ширина перерізу біля його краю, в якому поперечна силу Q, та згинний момент M одночасно найб або близькі до найб.
33. Переміщення при згині. Метод інтегрування найблженого диференціального рівняння зігнутої осі балки
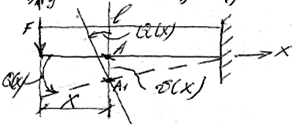
Внаслідок навантаження балки центр мас А перерізу балки з координатою х здійснює переміщення в положення А1. Згідно з гіпотезою малих деформацій будемо вважати, що центр мас попер перер зміщується вертикально. Vx – прогин балки в даному попер перер. Qx – поворот балки, θx – кут повороту попер перер балки в наслідок навантаження.
Таким чином при згинанні має місце 2 переміщення: Qx - кут переміщення, Vx
- прогин балки.
![]()
Отже кут повороту є першою похідною прогину. Ф-я Vx є р-ням пружної лінії балки – це геометричне місце центра мас попер перер.
На переміщення Vx та θx при поперечному згині балок впливають згинний момент М(х)та поперечна сила Q(x). Якщо не враховувати впливу Q(x) на переміщення V(x) та θ(x) то криву балки можна записати згідно з-ну Гука для згину
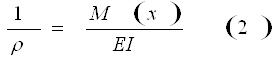
де ρ – радіус кривизни
М(х) – згинний момент в перерізі з координатою х.
Е – модуль пружності м-лу
І – мом інерції перерізу балки відносно нейтральної осі
ЕІ – жорсткість при згині
З математичного аналізу крива вираховується наступним чином

Прирівнявши праві частини 2 і 3 одержимо:

 |
4 – є точним диф. р-ням пружної лінії балки, якщо визначається із знаком в правій частині.