Лабораторная работа: Построение и расчет статических характеристик электропривода системы генератор-двигатель системы Г-Д
Тема проекта:
«Построение и расчет статических характеристик электропривода системы генератор-двигатель системы Г-Д»
Содержание
1. Исходные данные
2. Описание работы электропривода системы генератор-двигатель
3. Выбор генератора
4. Расчет и построение статических характеристик электропривода
5. Определение динамических параметров для электродвигателя
6. Определение коэффициента форсировки
7. Расчет резисторов в цепи обмотки возбуждения генератора
7.1 Определение сопротивления разрядного резистора R4
7.2 Определение сопротивления резисторов R1, R2, R3
Заключение
Список использованной литературы
1. Исходные данные (вариант №5)
1. Тип электродвигателя Д-32
2. Номинальная мощность Рном 12 к Вт
3. Номинальная скорость nном 770 об/мин.
4. Номинальный ток Iном 65 А
5. Суммарное сопротивление электродвигателя Rя.д.+Rдп.д. 0,28 Оm
6. Число активных проводников Wя.д. 558
7. Число параллельных ветвей якоря 2а 2
8. Число полюсов 2р 4
9. Момент инерции якоря Jд 0,425 кг·м2
10.Коэффициент инерции привода Кj 1,6
11.Коэффициент нагрузки привода Кз 1
2. Описание работы электропривода системы генератор-двигатель
Схема управления силовой частью системы Г-Д (рисунок 2.1) обеспечивает две рабочие скорости вращения двигателя М1: основную (номинальную) wдном и половинную, равную 0,5wдном. Управление системой осуществляется с помощью командоаппарата S5, имеющего пять положений. Когда S5 находится в положении 1, двигатель М1 работает на основной характеристике, переключение в положение 2 обеспечивает вращение двигателя с половинной скоростью. В положении 3 обмотка возбуждения генератора LG1.2 отключена. В положениях 4 и 5 двигатель М1 вращается в противоположном направлении (реверс) соответственно с половинной и основной скоростью. При номинальной скорости вращения электродвигателя М1 в цепь возбуждения генератора LG1.2 включены резисторы R1 и R2, при половинной скорости – R1, R2, R3. Пуск электродвигателя осуществляется с форсировкой возбуждения генератора, выполняемой закорачиванием на время переходного процесса резисторов R2 и R3 контактами контактора К5. Отключение форсировки выполняется с помощью реле напряжения К6 и К7, включенных на шины генератора G1 и настроенных на напряжения срабатывания, соответствующие значениям выбранной скорости двигателя. Останов электродвигателя происходит при переводе командоаппарата в положение 3, при этом гашение энергии магнитного поля возбуждения генератора осуществляется в разрядном контуре «обмотка возбуждения LG1.2 – разрядное сопротивление R4».
Схема обеспечивает ряд защит электропривода:
- от снижения тока возбуждения двигателя ниже допустимого – с помощью реле обрыва поля К9;
- от превышения напряжения генератора выше допустимого – реле К8;
- максимальную токовую защиту – реле К11;
- нулевую защиту (от самозапуска ЭП после кратковременного исчезновения напряжения в сети переменного тока) – реле К1.
Все реле защиты воздействуют на реле нулевой защиты К1, отключающее обмотку возбуждения генератора.
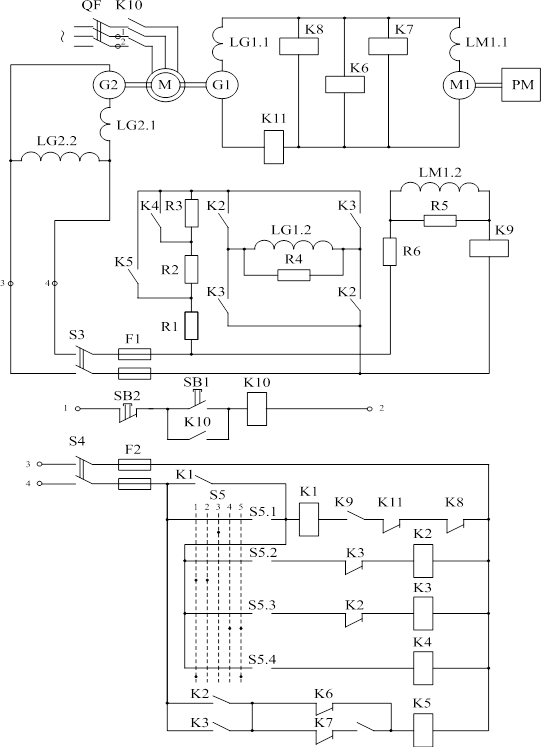
Рисунок 2.1 – Схема электрическая принципиальная системы Г-Д
3. Выбор генератора
Выбор генератора производится по номинальным данным двигателя, при этом номинальное напряжение генератора должно быть приблизительно на 5% больше напряжения двигателя, а
Iн.г. Iн.д. (3.1)
где Iн.г., Iн.Д. – номинальный ток соответственно генератора и двигателя, А.
В соответствии с выше переведенными рекомендациями я выбрала такой генератор:
1. Тип генератора П71
2. Номинальный ток генератора Iн.г. 69.5 А
3. Число витков обмотки якоря Wя.г. 297
4. Сопротивление якоря Rя.г. 0,224 Ом
5. Число витков обмотки последовательного возбуждения WО,В.г. 14
6. Сопротивление ОПВ Rо.вз..г 0,0115 Ом
7. Число витков обмотки возбуждения Wв.г. 950
8. Сопротивление обмотки возбуждения Rв.г. 43 Ом
9. Номинальное напряжение Uн.г. 230 В
10.Номинальная скорость nн.г. 1450 об/мин
11.Число пар полюсов 2р 4
12.Число параллельных ветвей 2а 4
Таблица 3.1- Кривая намагничивания генератора
| F, A | 0 | 1000 | 2000 | 3000 | 4000 | 5000 | 6000 | 8000 |
| Ф,Вб | 0 | 0,0031 | 0,0053 | 0,00687 | 0,0081 | 0,0088 | 0,0094 | 0,0103 |
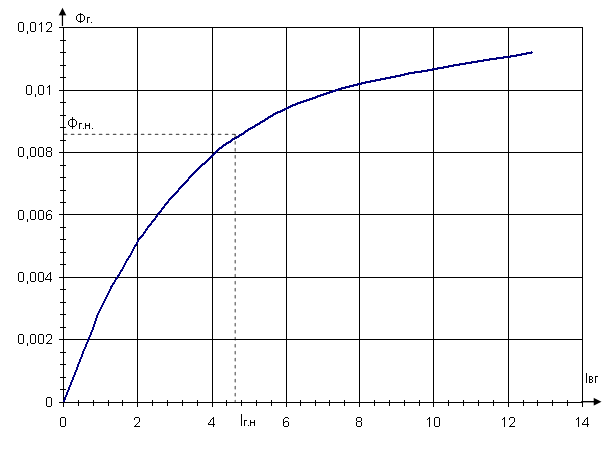
Рисунок 3.1 – График зависимости Фг.н.=f(Iв.г.н.)
Построим характеристику
ЭДС холостого хода генератора ![]() при номинальной скорости вращения генератора
при номинальной скорости вращения генератора ![]() . ЭДС холостого хода
генератора определяем по соотношению:
. ЭДС холостого хода
генератора определяем по соотношению:
![]() ,
(3.2)
,
(3.2)
где Eг. –ЭДС генератора, В;
Кг. – конструктивный коэффициент генератора;
Фг. – поток возбуждения, Вб;
wг.н. – номинальная угловая скорость вращения якоря генератора, рад/с.
![]() (3.3)
(3.3)
где n – номинальная скорость генератора, об/мин.
Конструктивный коэффициент генератора Кг определяется по формуле:
![]()
![]() , (3.4)
, (3.4)
где Wя – число витков обмотки якоря генератора;
р – число пар полюсов обмотки возбуждения генератора;
а – число параллельных ветвей обмотки якоря генератора.
Ток возбуждения генератора Iв.г, А:
![]() , (3.5)
, (3.5)
где F – магнитодвижущая сила, А;
Wов.г. – число витков обмотки возбуждения генератора.
![]()
![]()
Результаты расчетов для построения зависимости ![]() свести в табл. 3.2
свести в табл. 3.2
Таблица 3.2– Расчет характеристики холостого хода генератора
|
Iв.г.,A |
1,052 | 1,95 | 2,105 | 3,157 | 4,21 | 4,68 | 5,263 | 6,315 | 8,421 | 12,631 |
|
Eг., A |
89 | 144,79 | 151,16 | 197,23 | 232,54 | 242,72 | 252,64 | 269,87 | 295,71 | 321,54 |
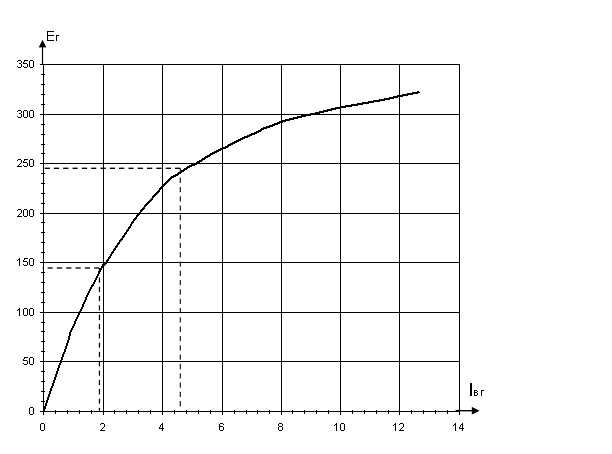
Рисунок 3.2 – Характеристика ЭДС холостого хода генератора
4. Расчет и построение статических характеристик электропривода
Статические характеристик (электромеханическая f(IЯ) и механическая f(М) ) рассчитываются по известным соотношениям для двигателя постоянного тока независимого возбуждения:
![]() (4.1)
(4.1)
 (4.2)
(4.2)
где КД. – конструктивный коэффициент двигателя;
ФН..Д. – номинальный поток его возбуждения, Вб;
![]() - суммарное сопротивление
якорной цепи, Оm.
- суммарное сопротивление
якорной цепи, Оm.
Суммарное сопротивление якорной цепи RяS определяется суммой всех сопротивлений элементов силовой цепи, включенных последовательно с якорем генератора:
![]() = КТ·(RЯД + RДПД+ RЯГ+ RПР+ RДПГ) + 4RЩ, (4.3)
= КТ·(RЯД + RДПД+ RЯГ+ RПР+ RДПГ) + 4RЩ, (4.3)
![]() =КТ·(RЯД + RДПД) + 2RЩ, (4.4)
=КТ·(RЯД + RДПД) + 2RЩ, (4.4)
где КТ – температурный коэффициент, учитывающий увеличение сопротивления при нагреве, КТ – 1,24;
RЯД, RЯГ – сопротивление якорной цепи двигателя и генератора, Оm;
RДПГ,RДПД – сопротивление дополнительных полюсов генератора и двигателя, Оm;
RЩ – сопротивление щеточных контактов, Оm;
RПР – сопротивление соединительных проводов, Оm.
![]() (4.5)
(4.5)
где UЩ – падение напряжения в щеточных контактах,считаем неизменным 1В.
При определении Rпр длину соединительных проводов принять – l=25 м, провода считать медными:
![]() (4.6)
(4.6)
где ρ - удельное сопротивление Ом×мм2/м (для меди r = 0,017);
l – суммарная длина соединительных проводов, м;
j – допустимая плотность тока, j = 4 А/мм2
IН.Д. – ток якорной цепи системы Г-Д, А
![]() ;
; ![]() Оm;
Оm;
Окончательное суммарное сопротивление якорной цепи будет иметь вид:
![]() =1,24(0,00805+0,00655+0,00077+0,00309)+4*0,00145=0,902
Оm;
=1,24(0,00805+0,00655+0,00077+0,00309)+4*0,00145=0,902
Оm;
![]() =1,24·0,28+2·0,0153=0,0129
Оm;
=1,24·0,28+2·0,0153=0,0129
Оm;
Произведение (КД.·ФН.Д.) определяем по паспортным данным двигателя:
![]() , (4.7)
, (4.7)
![]() - номинальная угловая скорость вращения двигателя
- номинальная угловая скорость вращения двигателя
![]()
![]() , (4.8)
, (4.8)
![]() ,
,
Статический момент сопротивления находится из соотношения:
МС=КЗ· МЭМ.Н= 1·148,88 = 148,88, (4.9)
где КЗ – коэффициент нагрузки;
МЭМ.Н. – номинальный электромагнитный момент двигателя М1, Н·м.
![]()
![]() , (4.10)
, (4.10)
Номинальный момент на валу двигателя:
![]()
![]() , (4.11)
, (4.11)
где РН.Д.– номинальная мощность, Вт
Для обеспечения необходимой скорости вращения двигателя ЭДС генератора должна превышать ЭДС двигателя на величину падения напряжения в сопротивлении якорной цепи:
ЕГ=(КД.· ФН.Д.)·Н.Д.IЯ.·RЯ .12
где IЯ. – ток двигателя, А.
Ток статической нагрузки, А:
IЯ.= IН.Д.· КЗ.=65·1=65, (4.13)
ЕГ=2,43·80,6+65·0,724=242,723 В,
Для построения статических характеристик двигателя необходимо знать всего две точки, так как они представляют собой прямую линию. В качестве таких точек удобно принять точки:
1 Точка идеального холостого тока (М=0, Iя=0),
2 Точка, в которой М=МС со скоростью вращения Н.Д.
3 Точка, в которой Iя.= IН.Д. со скоростью вращения Н.Д.
![]() ,
,
![]() ,
,
 ,
,
Также не обходимо построить статические характеристики при ЭДС генератора работающей при половиной скорости от номинальной.
ЕГ/0,5=( КД.· ФН.Д.)·Н.Д/2.IЯ.·RЯ В .15
ЕГ/0,5=2,43·40,3+65·0,721=144,794
![]() ,
,
![]() ,
,
![]() ,
,
Расчет естественной характеристики:
![]() ,
,
![]() ,
,
![]()
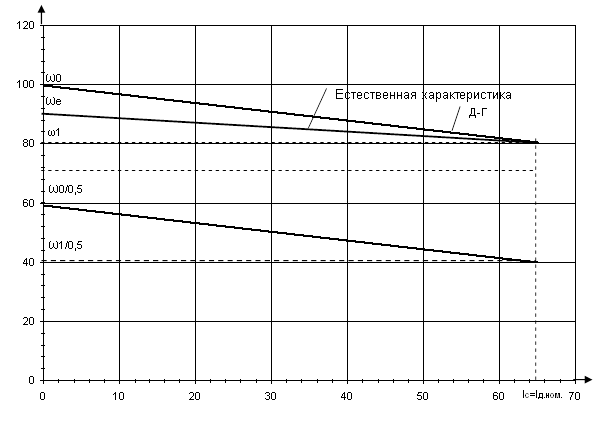
Рисунок 5.1- Электромеханические характеристики систем Д-Г и Д
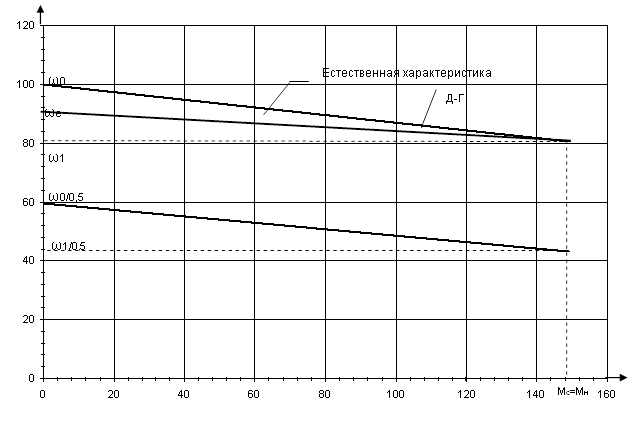 Рисунок 5.2- Механические характеристики систем Д-Г и
Д
Рисунок 5.2- Механические характеристики систем Д-Г и
Д
5. Определение динамических параметров для электродвигателя
Динамическими называются параметры, определяющие характер протекания переходных процессов.
При расчете пренебрегают электромагнитной инерционностью якорной цепи, реакцией якорей генератора и двигателя, влиянием вихревых токов с учетом этих допущений к динамическим параметрам системы генератор-двигатель относятся:
1 Электромагнитная постоянная времени обмотки возбуждения генератора
![]() (5.1)
(5.1)
2 Электромеханическая постоянная времени электропривода - ТМ
 , (5.2)
, (5.2)
где JД – приведенный к валу двигателя эквивалентный момент инерции всей системы ЭП, кг×м2
JД=KJ·JД.=2·10,25=20,5, (5.3)
где KJ – коэффициент инерции привода;
JД – момент инерции якоря привода, кг·м2.
![]() ,
,
где LВСР – индуктивность обмотки возбуждения, Гн;
RВГ - активное сопротивление обмотки возбуждения, Оm.
Индуктивность обмотки возбуждения является переменной величиной и зависит от тока возбуждения. Пользуясь кривой намагничивания ФГ=f(F), найдем зависимость LB=f(IВ.Г.) по формуле:
 , (5.4)
, (5.4)
где ФН.Г,IВГ.Н – номинальное значение потока и тока возбуждения генератора;
н – коэффициент рассеивания магнитного потока при номиналом режиме. н = 1,1.
Расчеты по формуле (5.4) удобно свести в таблицу 5.1
Таблица 5.1- Расчет индуктивности обмотки возбуждения
|
ΔIВГ |
ΔФН.Г |
ΔФН.Г/ΔIВГ |
|
(3)+(4) |
(5)×2рWов.г. |
IВСРj |
| 1,052 | 0,0031 | 0,00208 | 0,00027 | 0,0023 | 12,22 | 0,526 |
| 1,053 | 0,0022 | 0,00149 | 0,0017 | 8,74 | 1,57 | |
| 1,052 | 0,00157 | 0,00168 | 0,00195 | 6,46 | 2,631 | |
| 1,053 | 0,00123 | 0,000647 | 0,00091 | 7,41 | 3,68 | |
| 1,053 | 0,0007 | 0,000855 | 0,0011 | 3,45 | 4,73 | |
| 1,052 | 0,0009 | 0,000427 | 0,00069 | 4,18 | 5,78 | |
| 2,106 | 0,0009 | 0,000213 | 0,0004 | 2,62 | 7,36 | |
| 4,21 | 0,0009 | 0,00294 | 0,0032 | 1,52 | 10,52 |
По
данным таблицы 5.1 строим
зависимость ![]() .
.
 (5.5)
(5.5)
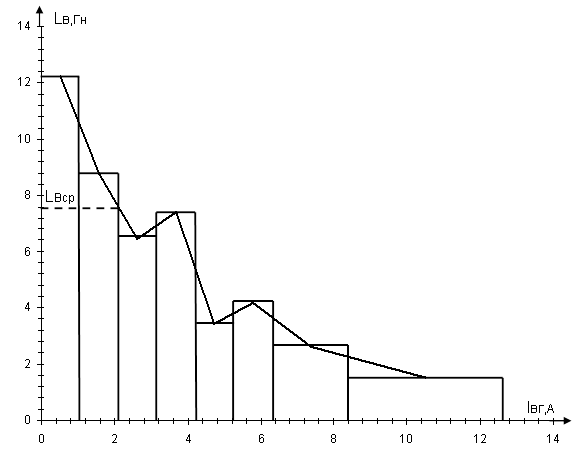
Рисунок 5.1-Расчет LВ.СР.
LВСР= 7,9 Гн,
![]() .
.
6. Определение коэффициента форсировки
Для сокращения длительности переходного процесса в системе генератор-двигатель используется методы форсированного изменения тока возбуждения. Как правело, форсировка возбуждения осуществляется за счет приложения повышенного напряжения UC к цепи возбуждения генератора на период разгона двигателя до основной скорости.
UC=KФ··UВ, (6.1)
где KФ – коэффициент форсировки;
UВ – напряжение на обмотке возбуждения генератора в установившемся
режиме, В.
UВ=IВГН··RВГ=4,68·43=201,24, (6.2)
Предварительное значение коэффициента форсировки определяем из условия, что K1 во время форсировки закорочено, и максимальный ток якоря Iя мах во время пуска не превысит допустимого IДОП=2,25·IД.Н.= 146,25 А.
 (6.3)
(6.3)
где IКЗ – ток КЗ при ЭДС генератора, обеспечивающей номинальную скорость вращения двигателя, А.
IКЗ=ЕГ1/RЯ=242,7/0,721=336,615, (6.4)
где ЕГ1- ЭДС генератора, обеспечивающая основную скорость вращения двигателя, В.
IС=КЗ ·IНД=1 ·65=65, (6.5)
где IС – ток статической нагрузки,А
 ,
,
UC = 1,23 ·201,24=247,52 В,
Принимаем ближайшее большее стандартное значение UC. Данное условие удовлетворяет нашим условиям так как UC =440.
7. Расчет резисторов в цепи обмотки возбуждения генератора
7.1 Определение сопротивления разрядного резистора R4
При выборе разрядного резистора R4 необходимо выполнить два условия.
Во-первых, допустимое перенапряжение на обмотке возбуждения генератора в момент ее отключения, находящейся под номинальным током, не должно превышать десятикратного номинального напряжения возбуждения, т.е.
I н.г ×R4 £ 10×Uг.н. (7.1.1)
С учетом (2.32) для величины сопротивления R4 можно записать первое условие:
R4 £ 10×Uвн / Iвгн, (7.1.2)
или:
R4 £ 10×Rвг. (7.1.3)
Во-вторых, максимальное значение тока якорной цепи при этом не должен превышать допустимого по условиям коммутации:
Iяmax £ kIд.н, (7.1.4)
где k – коэффициент перегрузки по току, k=2,28.
Для расчета R4 пользуются упрощенной зависимостью:
 , (7.1.5)
, (7.1.5)
где Тво – постоянная времени обмотки возбуждения при ее отключении,
Тво=Lвср/(Rвг+R4), c.
С учетом условия (6.1.4) выражение (6.1.5) преобразуется к виду:
 , (7.1.6)
, (7.1.6)
где n=R4/Rвг.
Из (7.1.6) найдем n, для этого сначала найдем левую часть равенства:
![]()
![]()
Теперь из равенства (7.1.6) найдем n, методом подбора

Таблица 7.1.1- опредиленеи n:
| n | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 0,42 | 0,486 | 0,524 | 0,559 | 0,588 | 0,612 | 0,184 | 0,652 | 0,668 |
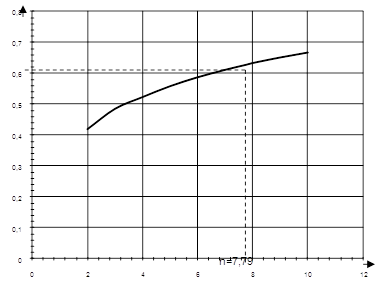
Рисунок 7.1.1-График
зависимости  =f(n)
=f(n)
R4=n·Rв.г.=7,79·43=335 Ом
7.2 Определение сопротивления резисторов R1, R2, R3
Резистор R1 при форсированном пуске служит для гашения избытка сетевого напряжения (напряжение генератора-возбудителя) В,
Uизб = Uс – Кф×Uвр. (7.2.1)
Uизб=440-1,22·201,24=194,5
Сопротивление резистора R1 можно определить по формуле
 , (7.2.2)
, (7.2.2)
где Iвф,А – установившееся значение тока в цепи возбуждения при форсировке;
Iвф = Кф×Iвг +IR4, (7.2.3)
где IВГ,A – ток возбуждения генератора при форсировке:
IВГ=КФ· Iвг=1,22·4,68=5,709,
где IR4,А – ток в разрядном сопротивлении R4, определяемый соотношением
IR4=Кф×Uвр/R4=247,52/335=0,732, (7.2.4)
Таким образом ток в цепи возбуждения при форсировке, A:
Iвф=5,709+0,732=6,44,
Сопротивление резистора: Ом
![]() ,
,
Уточненное значение R1 определяют по формулам:
 (7.2.5)
(7.2.5)
Где: ![]() , (7.2.6)
, (7.2.6)
![]() , (7.2.7)
, (7.2.7)
Таблица 7.2.1 – опредиление сопротивления R1
| R1 | Kф’ | Iя max |
| 30,19 | 1,22 | 178 |
| 40 | 1,067 | 163 |
| 44 | 1,015 | 160 |
| 45,3 | 0,999 | 158 |
 , (7.2.8)
, (7.2.8)
Учитываем то, что К ‘ф не должно быть больше единицы, поэтому R1=45,3 Ом (выбираем из условия при К ‘ф=1). В этом случае форсировка будет реализована посредством постоянно включенного сопротивления R1, а сопротивление R2 будет отсутствовать.
Сопротивление резистора R3 находят из условия получения половинной скорости вращения двигателя:
 , (7.2.9)
, (7.2.9)
где Iвг0,5 – ток возбуждения генератора, обеспечивающий половинную скорость вращения, А. Iвг0,5=1,98
![]() .
.
Заключение
Целью данного курсового проекта было закрепление и углубление теоретических знаний по электромагнитным и электромеханическим свойствам машин постоянного тока, а также изучение физических явлений в системе генератор-двигатель (Г-Д) при переходных режимах, овладение аналитическим методом расчета переходных процессов (п.п.) в нелинейной электромеханической системе электропривода (ЭП) и исследование влияния параметров системы на характер переходных процессов.
Управление по системе «генератор – двигатель» выгодно отличается тем, что оно не требует применения силовых контакторов, реостатов и т. п. Поскольку управление двигателем осуществляется путем регулирования сравнительно небольших токов возбуждения, оно легко поддается автоматизации. Независимое возбуждение генератора обеспечивает широкое, плавное и экономичное изменение напряжения на зажимах якоря двигателя.
Недостатками данной системы являются низкое к.п.д., большая установленная мощность из-за наличия трех машин.
Список источников информации
1. Чиликин М.Г. и др. Основы автоматизированного электропривода. М.: Энергия, 1974. –567 с.
2. Ключев В.И. Теория электропривода: Учеб. для вузов. –М.: Энергоатомиздат, 1985. –560 с.
3. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. –М.: Наука. Гл. ред. физ.мат. лит., 1981. –720 с.
4. Андреев В.П., Сабинин Ю.А. Основы электропривода. –М.; Л.: Госэнергоиздат, 1963. –722 с.
5. Попович М.Г., Борисюк М.Г., Гаврилюк В.А. та ін. Теорія електропривода. –К.: Вища шк.. 1993. –494 с., іл.
6. Методические указания по выполнению курсового проекта по курсу «Теория автоматизированного электропривода» для студентов специальностей 7.092203 (7.092206, 7.090803) /Сост. Клепиков В.Б., Горохов А.Г., Шамардина В.Н., Касторный П.М. – Харьков: НТУ «ХПИ», 2003. - с.