Реферат: Архитектура микроконтроллеров
Томский политехнический университет
Государственное образовательное учреждение высшего профессионального образования
«ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Реферат на тему
«Архитектура микроконтроллеров C51, AVR, ARM»
Томск 2009
Содержание
Введение
1. Архитектура микроконтроллеров MCS-51
1.1. Блок управления и синхронизации
2. Архитектура микроконтроллеров ARM
2.1. Основные характеристики ядра ARM7
3. Архитектура микроконтроллера AVR
3.1. Микропроцессор
3.2. Память
3.2.1. Память программ (Flash ROM или Flash ПЗУ)
3.2.2. Память данных
3.2.3. Регистровая память (РОН и РВВ)
3.2.4. Энергонезависимая память данных (EEPROM)
3.2.5. Оперативная память (ОЗУ или RAM)
3.3. Периферия
3.3.1. Порты ввода/вывода (I/O)
3.3.2. Прерывания (INTERRUPTS)
3.3.3. Таймеры/счетчики (TIMER/COUNTERS)
3.3.4. Сторожевой таймер (WDT)
3.3.5. Аналоговый компаратор (AC)
3.3.6. Аналого-цифровой преобразователь (A/D CONVERTER)
3.3.7. Универсальный последовательный приемопередатчик (UART или USART)
3.3.8. Последовательный периферийный интерфейс SPI
3.3.9. Двухпроводной последовательный интерфейс TWI
3.3.10. Интерфейс JTAG
3.3.11. Тактовый генератор
3.3.12. Система реального времени (RTC)
3.4. Питание
3.4.1. Сброс при снижении напряжения питания (BOD)
Заключение
Список литературы
Введение
Микроконтроллер (MCU) — микросхема, предназначенная для управления электронными устройствами. Типичный микроконтроллер сочетает в себе функции процессора и периферийных устройств, может содержать ОЗУ и ПЗУ. По сути, это однокристальный компьютер, способный выполнять простые задачи. Использование одной микросхемы, вместо целого набора, как в случае обычных процессоров, применяемых в персональных компьютерах, значительно снижает размеры, энергопотребление и стоимость устройств, построенных на базе микроконтроллеров.
Микроконтроллеры являются основой для построения встраиваемых систем, их можно встретить во многих современных приборах, таких, как телефоны, стиральные машины и т. п. Большая часть выпускаемых в мире процессоров — микроконтроллеры[3].
В отличие от микросхем "жесткой логики", микроконтроллер - это микросхема, у которой, во-первых, зависимость выходных сигналов от входных определяется исключительно правилами, заложенными разработчиком заранее (это называется программированием, а сами правила - программой), а во-вторых, нет четкого деления выводов на входы и выходы - обычно почти все выводы микроконтроллера в зависимости от желания и намерения разработчика могут быть как входами, так и выходами (и даже менять свое назначение в процессе работы).
1. Архитектура микроконтроллеров MCS-51
Архитектура семейства MCS-51 в значительной мере предопределяется ее назначением - построение компактных и дешевых цифровых устройств. Все функции микроЭВМ реализуются с помощью единственной микросхемы. В состав семейства MCS-51 входит целый ряд микросхем от самых простых микроконтроллеров до достаточно сложных. Микроконтроллеры семейства MCS-51 позволяют выполнять как задачи управления различными устройствами, так и реализовывать отдельные узлы аналоговой схемы. Все микросхемы этого семейства работают с одной и той же системой команд, большинство из них выполняется в одинаковых корпусах с совпадающей цоколевкой (нумерация ножек для корпуса). Это позволяет использовать для разработанного устройства микросхемы разных фирм - производителей (таких как Intel, Dallas, Atmel, Philips и т.д.) без переделки принципиальной схемы устройства и программы.[5]
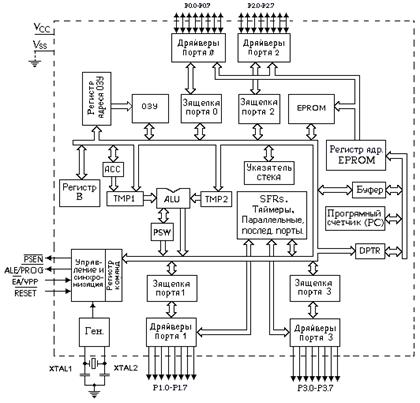
Рис 1. Структурная схема контроллера К1830ВЕ751
Структурная схема контроллера представлена на рис.1. и состоит из следующих основных функциональных узлов: блока управления, арифметико-логического устройства, блока таймеров/счетчиков, блока последовательного интерфейса и прерываний, программного счетчика, памяти данных и памяти программ. Двусторонний обмен осуществляется с помощью внутренней 8-разрядной магистрали данных. Рассмотрим подробнее назначение каждого блока. По такой схеме построены практически все представители семейства MCS-51. Различные микросхемы этого семейства различаются только регистрами специального назначения (в том числе и количеством портов). Система команд всех контроллеров семейства MCS-51 содержит 111 базовых команд с форматом 1, 2 или 3 байта и не изменяется при переходе от одной микросхемы к другой. Это обеспечивает прекрасную переносимость программ с одной микросхемы на другую.
1.1 Блок управления и синхронизации
Блок управления и синхронизации (Timing and Control) предназначен для выработки синхронизирующих и управляющих сигналов, обеспечивающих координацию совместной работы блоков ОЭВМ во всех допустимых режимах ее работы.В состав блока управления входят:
· устройство формирования временных интервалов,
· логика ввода-вывода,
· регистр команд,
· регистр управления потреблением электроэнергии,
· дешифратор команд, логика управления ЭВМ.
Устройство формирования временных интервалов предназначено для формирования и выдачи внутренних синхросигналов фаз, тактов и циклов. Количество машинных циклов определяет продолжительность выполнения команд. Практически все команды ОЭВМ выполняются за один или два машинных цикла, кроме команд умножения и деления, продолжительность выполнения которых составляет четыре машинных цикла. Обозначим частоту задающего генератора через Fг. Тогда длительность машинного цикла равна 12/Fг или составляет 12 периодов сигнала задающего генератора. Логика ввода - вывода предназначена для приема и выдачи сигналов, обеспечивающих обмен информации с внешними устройствами через порты ввода вывода Р0-Р3.
Регистр команд предназначен для записи и хранения 8-ми разрядного кода операции выполняемой команды. Код операции, с помощью дешифратора команд и логики управления ЭВМ, преобразуется в микропрограмму выполнения команды.
Регистр управления потреблением (PCON) позволяет останавливать работу микроконтроллера для уменьшения потребления электроэнергии и уменьшения уровня помех от микроконтроллера. Еще большего уменьшения потребления электроэнергии и уменьшения помех можно добиться, остановив задающий генератор микроконтроллера. Этого можно достичь при помощи переключения бит регистра управления потреблением PCON. Для варианта изготовления по технологии n-МОП (серия 1816 или иностранных микросхем, в названии которых в середине отсутствует буква 'c') регистр управления потреблением PCON содержит только один бит, управляющий скоростью передачи последовательного порта SMOD, а биты управления потреблением электроэнергией отсутствуют.
Арифметико-логическое устройство (ALU) представляет собой параллельное восьмиразрядное устройство, обеспечивающее выполнение арифметических и логических операций. АЛУ состоит из [5]:
· регистров аккумулятора, регистров временного хранения TMP1 и TMP2,
· ПЗУ констант,
· сумматора,
· дополнительного регистра (регистра В),
· аккумулятора (ACC),
· регистра состояния программ (PSW).
Регистр аккумулятор и регистры временного хранения - восьмиразрядные регистры, предназначенные для приема и хранения операндов на время выполнения операций над ними. Эти регистры программно не доступны.
ПЗУ констант обеспечивает выработку корректирующего кода при двоично-десятичном представлении данных, кода маски при битовых операциях и кода констант.
Параллельный восьмиразрядный сумматор представляет собой схему комбинационного типа с последовательным переносом, предназначенную для выполнения арифметических операций сложения, вычитания и логических операций сложения, умножения, неравнозначности и тождественности.
Регистр B - восьмиразрядный регистр, используемый во время операций умножения и деления. Для других инструкций он может рассматриваться как дополнительный сверхоперативный регистр.
Аккумулятор - восьмиразрядный регистр, предназначенный для приема и хранения результата, полученного при выполнении арифметико-логических операций или операций сдвига
Блок последовательного интерфейса и прерываний (ПИП) предназначен для организации ввода - вывода последовательных потоков информации и организации системы прерывания программ. В состав блока входят:
1. буфер ПИП,
2. логика управления,
3. регистр управления,
4. буфер передатчика,
5. буфер приемника,
6. приемопередатчик последовательного порта,
7. регистр приоритетов прерываний,
8. регистр разрешения прерываний,
9. логика обработки флагов прерываний и схема выработки вектора.
Счетчик команд (Program Counter) предназначен для формирования текущего 16-разрядного адреса внутренней памяти программ и 8/16-разрядного адреса внешней памяти программ. В состав счетчика команд входят 16-разрядные буфер РС, регистр РС и схема инкремента (увеличения содержимого на 1).
Память данных (RAM) предназначена для временного хранения информации, используемой в процессе выполнения программы.
Порты P0, P1, P2, P3 являются квазидвунаправленными портами ввода - вывода и предназначены для обеспечения обмена информацией ОЭВМ с внешними устройствами, образуя 32 линии ввода-вывода.
Регистр состояния программы (PSW) предназначен для хранения информации о состоянии АЛУ при выполнении программы.
Память программ (EPROM) предназначена для хранения программ и представляет собой постоянное запоминающее устройство (ПЗУ). В разных микросхемах применяются масочные, стираемые ультрафиолетовым излучением или FLASH ПЗУ.
Регистр указателя данных (DPTR) предназначен для хранения 16 - разрядного адреса внешней памяти данных или памяти программ.
Указатель стека (SP) представляет собой восьмиразрядный регистр, предназначенный для организации особой области памяти данных (стека), в которой можно временно сохранить любую ячейку памяти.
2. Архитектура микроконтроллеров ARM
Широкое портфолио микроконтроллеров ARM позволяет использовать эти устройства в большом числе приложений, но лучше всего их преимущества могут раскрыться в портативных приложениях, так как эти микроконтроллеры предлагают наиболее гибкое управление энергопотреблением за счет большого числа режимов работы, вариантов синхронизации и других особенностей. За счет этого, ARM-микроконтроллеры STM позволяют добиться лучших характеристик энергопотребления в этом классе устройств.[4]
Эти микросхемы имеют пять режимов пониженного энергопотребления[3]:
• Режим ожидания (WAIT), при котором приостанавливается работа ядра, но продолжается функционирование периферии с сохранением содержимого регистров;
• Замедленный режим (SLOW), при котором тактовая частота замедляется до CLK/16 или 32 кГц;
• Режим глубокого понижения с ожиданием (LPWAIT). В этом режиме вводятся ограничения режимов WAIT и SLOW;
• Режим останова (STOP). Вся синхронизация останавливается, но состояние микроконтроллера, RAM и регистров сохраняется (поддерживается питание, нет сброса);
• Дежурный режим (STANDBY). Выключаются стабилизатор напряжения, питание ядра. Работает только RTC.
Микроконтроллеры ARM имеют высокую производительность, гибкое управление энергопотреблением, качественную Flash-память и наиболее широкий набор периферии из всех производителей ARM-микроконтроллеров.
Ниже приведена структура микроконтроллера ARM компании STMicroelectronics [4] .

Рис. 2. Структура микроконтроллера STR710
2.1. Основные характеристики ядра ARM7
· 32-разрядный RISC процессор (32-разрядные шины данных и адреса) с производительностью 17 MIPS при тактовой частоте 25 МГц (пиковая производительность 25 MIPS)
· 32-разрядная адресация - линейное адресное пространство в 4 Гбайта - исключает потребность в сегментированной, разделенной на банки или оверлейной памяти
· Тридцать один 32-разрядный регистр общего назначения и шесть регистров состояния
· Регистры адресов, записи и конвейера
· Циклическое сдвиговое устройство и перемножитель
· Трехуровневый конвейер (выборка команды, ее декодирование и выполнение)
· Рабочие режимы Big Endian и Little Endian
· Напряжение питания 3,3 и 5 В
· Малое потребление 0,6 мА/МГц, при изготовлении по CMOS технологии с топологическими нормами 0,8 мкм.
· Полностью статическая работа, позволяющая дополнительно снижать потребление за счет уменьшения тактовой частоты, что идеально для критичных к потреблению применений
· Быстрый отклик на прерывания применений реального масштаба времени
· Поддержка систем виртуальной памяти
· Простая но мощная система команд
Необходимо отметить, что перевод ядра на технологию с уменьшенными топологическими нормами позволяет как повысить его производительность, так и еще больше снизить потребление.
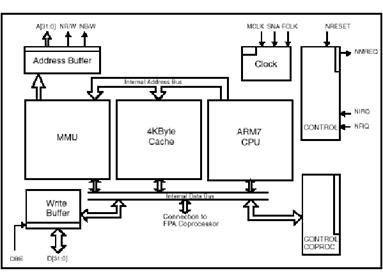
Рис. 3.Блок-схема ядра ARM7
32-разрядная система команд ядра ARM7 содержит одиннадцать базовых типов команд[3]:
· Два типа используют встроенное арифметико-логическое устройство, циклическое сдвиговое устройство и умножитель при операциях над данными в банке из 31 регистра, форматом по 32 разряда каждый;
· Три класса команд управления перемещением данных между памятью и регистрами, один оптимизированный на обеспечение гибкости адресации, другой под быстрое контекстное переключение и третий под подкачку данных;
· Три команды управляют потоком и уровнем привилегии выполнения;
· Три типа предназначены для управления внешними сопроцессорами, что позволяет расширить функциональные возможности системы команд за пределами ядра.
Система команд ARM хорошо обрабатывается компиляторами языков высокого уровня. В отличие от некоторых RISC процессоров, процессор ARM7, при возникновении необходимости в некотором уменьшении объема кодов, допускает программирование и на ассемблере.
Предоставляя, на лицензионной основе, ядро ARM7 своим кремниевым партнерам фирма ARM на основе разработала микроконтроллеры ARM7100, ARM7500 и ARM7500FE и, пожалуй, небольшое описание этих микроконтроллеров позволит оценить возможности, предоставляемые ядром ARM7.
Микроконтроллер ARM7100 можно назвать микроконтроллером широкого применения, поскольку он ориентирован на использование в таких устройствах как: персональные информационные устройства (PDA) и органайзеры, интеллектуальные мобильные телефоны и многофункциональные пейджеры, карманные измерительные устройства и системы сбора данных - в двух словах - от карманных игр до офисного оборудования. Микроконтроллер организован по модульному принципу с использованием внутренней шины AMBA, организующей взаимодействие ядра со стандартными библиотечными ячейками периферии.
Два других микроконтроллера ARM7500 и ARM7500FE являются однокристальными микрокомпьютерами, ориентированными реализацию мультимедиа устройств, портативных и настольных компьютеров, карманных вычислительных и измерительных устройств, интерактивных приставок цифрового TV, игровых консолей. Эти два микроконтроллера отличаются друг от друга наличием в приборе ARM7500FE ускорителя операций с плавающей точкой (FPA) и, соответственно, его более высокой производительностью. Они также реализованы по модульному принципу и объединяют ядро ARM7 с самодостаточными макроячейками видео, звука, FPA (ARM7500FE) и стандартных библиотечных ячеек периферии.
Общим для всех трех микропроцессоров является использование ядра ARM7, встроенного единого кэш команд и данных емкостью 8 Кбайт (ARM7100) и 4 Кбайт (ARM7500 и ARM7500FE), MMU, буфера записи, наличие режимов энергосбережения.
3. Архитектура микроконтроллера AVR
Микроконтроллер AVR содержит: быстрый RISK-процессор, два типа энергонезависимой памяти (Flash-память программ и память данных EEPROM), оперативную память RAM, порты ввода/вывода и различные периферийные интерфейсные схемы.[2]
3.1. Микропроцессор
Сердцем микроконтроллеров AVR является 8-битное микропроцессорное ядро или центральное процессорное устройство (ЦПУ), построенное на принципах RISK-архитектуры. Основой этого блока служит арифметико-логическое устройство (АЛУ). По системному тактовому сигналу из памяти программ в соответствии с содержимым счетчика команд (Program Counter - PC) выбирается очередная команда и выполняется АЛУ. Во время выбора команды из памяти программ происходит выполнение предыдущей выбранной команды, что и позволяет достичь быстродействия 1 MIPS на 1 МГц.
АЛУ подключено к регистрам общего назначения РОН (General Purpose Registers - GPR). Регистров общего назначения всего 32, они имеют байтовый формат, то есть каждый из них состоит из восьми бит. РОН находятся в начале адресного пространства оперативной памяти, но физически не являются ее частью. Поэтому к ним можно обращаться двумя способами (как к регистрам и как к памяти). Такое решение является особенностью AVR и повышает эффективность работы и производительность микроконтроллера.
Отличие между регистрами и оперативной памятью состоит в том, что с регистрами можно производить любые операции (арифметические, логические, битовые), а в оперативную память можно лишь записывать данные из регистров.
3.2. Память
В микроконтроллерах AVR реализована Гарвардская архитектура, в соответствии с которой разделены не только адресные пространства памяти программ и памяти данных, но и шины доступа к ним. Каждая из областей памяти данных (оперативная память и EEPROM) также расположена в своем адресном пространстве.
3.2.1. Память программ (Flash ROM или Flash ПЗУ)
Память программ предназначена для хранения последовательности команд, управляющих функционированием микроконтроллера, и имеет 16-ти битную организацию. Все AVR имеют Flash-память программ, которая может быть различного размера - от 1 до 256 КБайт. Ее главное достоинство в том, что она построена на принципе электрической перепрограммируемости, т. е. допускает многократное стирание и запись информации. Программа заносится во Flash-память AVR как с помощью обычного программатора, так и с помощью SPI-интерфейса, в том числе непосредственно на собранной плате. Возможностью внутрисхемного программирования (функция ISP) через коммуникационный интерфейс SPI обладают все микроконтроллеры AVR, кроме Tiny11 и Tiny28.
Все микроконтроллеры семейства Mega имеют возможность самопрограммирования, т. е. самостоятельного изменения содержимого своей памяти программ. Эта особенность позволяет создавать на их основе очень гибкие системы, алгоритм работы которых будет меняться самим микроконтроллером в зависимости от каких-либо внутренних условий или внешних событий.
Гарантированное число циклов перезаписи Flash-памяти у микроконтроллеров AVR второго поколения составляет не менее 10 тыс. циклов при типовом значении 100 тыс. циклов. (В официальной технической документации Atmel Corp. указывается значение 10 тыс. циклов.)
3.2.2. Память данных
Память данных разделена на три части: регистровая память, оперативная память (ОЗУ - оперативное запоминающее устройство или RAM) и энергонезависимая память (ЭСППЗУ или EEPROM).
3.2.3. Регистровая память (РОН и РВВ)
Регистровая память включает 32 регистра общего назначения (РОН или GPR), объединенных в файл, и служебные регистры ввода/вывода (РВВ). И те и другие расположены в адресном пространстве ОЗУ, но не являются его частью.
В области регистров ввода/вывода расположены различные служебные регистры (регистры управления микроконтроллером, регистры состояния и т. п.), а также регистры управления периферийными устройствами, входящими в состав микроконтроллера. По сути, управление микроконтроллером заключается в управлении этими регистрами.
3.2.4. Энергонезависимая память данных (EEPROM)
Для долговременного хранения различной информации, которая может изменяться в процессе функционирования микроконтроллерной системы, используется EEPROM-память. Все AVR имеют блок энергонезависимой электрически перезаписываемой памяти данных EEPROM от 64 Байт до 4 КБайт. Этот тип памяти, доступный программе микроконтроллера непосредственно в ходе ее выполнения, удобен для хранения промежуточных данных, различных констант, коэффициентов, серийных номеров, ключей и т.п. EEPROM может быть загружена извне как через SPI интерфейс, так и с помощью обычного программатора. Число циклов стирание/запись - не менее 100 тыс.
3.2.5. Оперативная память (ОЗУ или RAM)
Внутренняя оперативная статическая память Static RAM (SRAM) имеет байтовый формат и используется для оперативного хранения данных.
Размер оперативной памяти может варьироваться у различных чипов от 64 Байт до 4 КБайт. Число циклов чтения и записи в RAM не ограничено, но при отключении питающего напряжения вся информация теряется.
Для некоторых микроконтроллеров возможна организация подключения внешнего статического ОЗУ объемом до 64К.
3.3. Периферия
Периферия микроконтроллеров AVR включает: порты (от 3 до 48 линий ввода и вывода), поддержку внешних прерываний, таймеры-счетчики, сторожевой таймер, аналоговые компараторы, 10-разрядный 8-канальный АЦП, интерфейсы UART, JTAG и SPI, устройство сброса по понижению питания, широтно-импульсные модуляторы.
3.3.1. Порты ввода/вывода (I/O)
Порты ввода/вывода AVR имеют число независимых линий "вход/выход" от 3 до 53. Каждая линия порта может быть запрограммирована на вход или на выход. Мощные выходные драйверы обеспечивают токовую нагрузочную способность 20 мА на линию порта (втекающий ток) при максимальном значении 40 мА, что позволяет, например, непосредственно подключать к микроконтроллеру светодиоды и биполярные транзисторы. Общая токовая нагрузка на все линии одного порта не должна превышать 80 мА (все значения приведены для напряжения питания 5 В).
Архитектурная особенность построения портов ввода/вывода у AVR заключается в том, что для каждого физического вывода (пина) существует 3 бита контроля/управления, а не 2, как у распространенных 8-разрядных микроконтроллеров (Intel, Microchip, Motorola и т.д.). Это позволяет избежать необходимости иметь копию содержимого порта в памяти для безопасности и повышает скорость работы микроконтроллера при работе с внешними устройствами, особенно в условиях внешних электрических помех.
3.3.2. Прерывания (INTERRUPTS)
Система прерываний - одна из важнейших частей микроконтроллера. Все микроконтроллеры AVR имеют многоуровневую систему прерываний. Прерывание прекращает нормальный ход программы для выполнения приоритетной задачи, определяемой внутренним или внешним событием.
Для каждого такого события разрабатывается отдельная программа, которую называют подпрограммой обработки запроса на прерывание (для краткости - подпрограммой прерывания), и размещается в памяти программ.
При возникновении события, вызывающего прерывание, микроконтроллер сохраняет содержимое счетчика команд, прерывает выполнение центральным процессором текущей программы и переходит к выполнению подпрограммы обработки прерывания.
После выполнения подпрограммы прерывания осуществляется восстановление предварительно сохраненного счетчика команд и процессор возвращается к выполнению прерванной программы.
Для каждого события может быть установлен приоритет. Понятие приоритет означает, что выполняемая подпрограмма прерывания может быть прервана другим событием только при условии, что оно имеет более высокий приоритет, чем текущее. В противном случае центральный процессор перейдет к обработке нового события только после окончания обработки предыдущего.
3.3.3. Таймеры/счетчики (TIMER/COUNTERS)
Микроконтроллеры AVR имеют в своем составе от 1 до 4 таймеров/счетчиков с разрядностью 8 или 16 бит, которые могут работать и как таймеры от внутреннего источника тактовой частоты, и как счетчики внешних событий.
Их можно использовать для точного формирования временных интервалов, подсчета импульсов на выводах микроконтроллера, формирования последовательности импульсов, тактирования приемопередатчика последовательного канала связи. В режиме ШИМ (PWM) таймер/счетчик может представлять собой широтно-импульсный модулятор и используется для генерирования сигнала с программируемыми частотой и скважностью. Таймеры/счетчики способны вырабатывать запросы прерываний, переключая процессор на их обслуживание по событиям и освобождая его от необходимости периодического опроса состояния таймеров. Поскольку основное применение микроконтроллеры находят в системах реального времени, таймеры/счетчики являются одним из наиболее важных элементов.
3.3.4. Сторожевой таймер (WDT)
Сторожевой таймер (WatchDog Timer) предназначен для предотвращения катастрофических последствий от случайных сбоев программы. Он имеет свой собственный RC-генератор, работающий на частоте 1 МГц. Как и для основного внутреннего RC-генератора, значение 1 МГц является приближенным и зависит прежде всего от величины напряжения питания микроконтроллера и от температуры.
Идея использования стоpожевого таймеpа предельно проста и состоит в pегуляpном его сбpасывании под упpавлением пpогpаммы или внешнего воздействия до того, как закончится его выдеpжка вpемени и не пpоизойдет сбpос пpоцессоpа. Если пpогpамма pаботает ноpмально, то команда сбpоса стоpожевого таймеpа должна pегуляpно выполняться, пpедохpаняя поцессоp от сбpоса. Если же микpопpоцессоp случайно вышел за пpеделы пpогpаммы (напpимеp, от сильной помехи по цепи питания) либо зациклился на каком-либо участке пpогpаммы, команда сбpоса стоpожевого таймеpа скоpее всего не будет выполнена в течение достаточного вpемени и пpоизойдет полный сбpос пpоцессоpа, инициализиpующий все pегистpы и пpиводящий систему в pабочее состояние.
3.3.5. Аналоговый компаратор (AC)
Аналоговый компаратор (Analog Comparator) сравнивает напряжения на двух выводах (пинах) микроконтроллера. Результатом сравнения будет логическое значение, которое может быть прочитано из программы.
Выход аналогового компаратора можно включить на прерывание от аналогового компаратора. Пользователь может установить срабатывание прерывания по нарастающему или спадающему фронту или по переключению.
Присутствует у всех современных AVR, кроме Mega8515.
3.3.6. Аналого-цифровой преобразователь (A/D CONVERTER)
Аналого-цифровой преобразователь (АЦП) служит для получения числового значения напряжения, поданного на его вход. Этот результат сохраняется в регистре данных АЦП. Какой из выводов (пинов) микроконтроллера будет являться входом АЦП, определяется числом, занесенным в соответствующий регистр.
3.3.7. Универсальный последовательный приемопередатчик (UART или USART)
Универсальный асинхронный или универсальный синхронно/асинхронный приемопередатчик (Universal Synchronous/Asynchronous Receiver and Transmitter - UART или USART) - удобный и простой последовательный интерфейс для организации информационного канала обмена микроконтроллера с внешним миром. Способен работать в дуплексном режиме (одновременная передача и прием данных). Он поддерживает протокол стандарта RS-232, что обеспечивает возможность организации связи с персональным компьютером. (Для стыковки МК и компьютера обязательно понадобится схема сопряжения уровней сигналов. Для этого существуют специальные микросхемы, например MAX232.)
3.3.8. Последовательный периферийный интерфейс SPI
Последовательный периферийный трехпроводный интерфейс SPI (Serial Peripheral Interface) предназначен для организации обмена данными между двумя устройствами. С его помощью может осуществляться обмен данными между микроконтроллером и различными устройствами, такими, как цифровые потенциометры, ЦАП/АЦП, FLASH-ПЗУ и др. С помощью этого интерфейса удобно производить обмен данными между несколькими микроконтроллерами AVR.
Кроме того, через интерфейс SPI может осуществляться программирование микроконтроллера.
3.3.9. Двухпроводной последовательный интерфейс TWI
Двухпроводной последовательный интерфейс TWI (Two-wire Serial Interface) является полным аналогом базовой версии интерфейса I2C (двухпроводная двунаправленная шина) фирмы Philips. Этот интерфейс позволяет объединить вместе до 128 различных устройств с помощью двунаправленной шины, состоящей из линии тактового сигнала (SCL) и линии данных (SDA).
3.3.10. Интерфейс JTAG
Интерфейс JTAG был разработан группой ведущих специалистов по проблемам тестирования электронных компонентов (Joint Test Action Group) и был зарегистрирован в качестве промышленного стандарта IEEE Std 1149.1-1990. Четырехпроводной интерфейс JTAG используется для тестирования печатных плат, внутрисхемной отладки, программирования микроконтроллеров.[2]
Многие микроконтроллеры семейства Mega имеют совместимый с IEEE Std 1149.1 интерфейс JTAG или debugWIRE для встроенной отладки. Кроме того, все микроконтроллеры Mega с флэш-памятью емкостью 16 кбайт и более могут программироваться через интерфейс JTAG.
3.3.11. Тактовый генератор
Тактовый генератор вырабатывает импульсы для синхронизации работы всех узлов микроконтроллера. Внутренний тактовый генератор AVR может запускаться от нескольких источников опорной частоты (внешний генератор, внешний кварцевый резонатор, внутренняя или внешняя RC-цепочка). Минимальная допустимая частота ничем не ограничена (вплоть до пошагового режима). Максимальная рабочая частота определяется конкретным типом микроконтроллера и указывается Atmel в его характеристиках, хотя практически любой AVR-микроконтроллер с заявленной рабочей частотой, например, в 10 МГц при комнатной температуре легко может быть "разогнан" до 12 МГц и выше.
3.3.12. Система реального времени (RTC)
RTC реализована во всех микроконтроллерах Mega и в двух кристаллах "classic" - AT90(L)S8535. Таймер/счетчик RTC имеет отдельный предделитель, который может быть программным способом подключен или к источнику основной тактовой частоты, или к дополнительному асинхронному источнику опорной частоты (кварцевый резонатор или внешний синхросигнал). Для этой цели зарезервированы два вывода микросхемы. Внутренний осциллятор оптимизирован для работы с внешним "часовым" кварцевым резонатором 32,768 кГц.
3.4. Питание
AVR функционируют при напряжениях питания от 1,8 до 6,0 Вольт. Ток потребления в активном режиме зависит от величины напряжения питания и частоты, на которой работает микроконтроллер, и составляет менее 1 мА для 500 кГц,5 ... 6 мА для 5 МГц и 8 ... 9 мА для частоты 12 МГц.
AVR могут быть переведены программным путем в один из трех режимов пониженного энергопотребления.
· Режим холостого хода (IDLE). Прекращает работу только процессор и фиксируется содержимое памяти данных, а внутренний генератор синхросигналов, таймеры, система прерываний и сторожевой таймер продолжают функционировать. Ток потребления не превышает 2,5 мА на частоте 12 МГц.
· Стоповый режим (POWER DOWN). Сохраняется содержимое регистрового файла, но останавливается внутренний генератор синхросигналов, и, следовательно, останавливаются все функции, пока не поступит сигнал внешнего прерывания или аппаратного сброса. При включенном сторожевом таймере ток потребления в этом режиме составляет около 80 мкА, а при выключенном - менее 1 мкА. (Все приведенные значения справедливы для напряжения питания 5 В).
· Экономичный режим (POWER SAVE). Продолжает работать только генератор таймера, что обеспечивает сохранность временной базы. Все остальные функции отключены.
3.4.1. Сброс при снижении напряжения питания (BOD)
Схема BOD (Brown-Out Detection) отслеживает напряжение источника питания. Если схема включена, то при снижении питания ниже некоторого значения она переводит микроконтроллер в состояние сброса. Когда напряжение питания вновь увеличится до порогового значения, запускается таймер задержки сброса. После формирования задержки внутренний сигнал сброса снимается и происходит запуск микроконтроллера.
Заключение
Микроконтроллеры развиваются невероятными темпами и их можно встретить в огромном количестве современных промышленных и бытовых приборов: станках, автомобилях, телефонах, телевизорах, холодильниках, стиральных машинах... и даже кофеварках. Среди производителей микроконтроллеров можно назвать Intel, Motorola, Hitachi, Microchip, Atmel, Philips, Texas Instruments, Infineon Technologies (бывшая Siemens Semiconductor Group) и многих других.
Список литературы
1. Фрунзе А.В. Микроконтроллеры фирмы Philips семейства х51 Том 1. - Додэка-XXI, 2005г.
2. Белов А.В. Самоучитель разработчика устройств на микроконтроллерах AVR. - Наука и техника, 2008г.
3. Фрунзе А. В. Микроконтроллеры? Это же просто. - Додэка-XXI, 2007г. Мартин Т. Микроконтроллеры ARM7. - Додэка-XXI, 2006г.
5. Таненбаум Э. Архитектура компьютера. — СПб: Питер, 2007г.
| Разработка программатора микросхем ПЗУ | |
|
СОДЕРЖАНИЕ Введение 1 Обоснование технических решений 2 Конструкторская часть 2.1 Назначение 2.2 Принцип действия 2.3 Конструкция печатной платы ... Универсальность программатора заключается в его схемотехнике, позволяющей программировать кроме обычных ПЗУ и микроконтроллеров, микросхемы программируемой матричной логики (ПЛМ) и ... В данном случае у микроконтроллеров AVR три типа памяти FLASH, EEPROM и Locks&Fuse - состоит из двух байтов. |
Раздел: Рефераты по радиоэлектронике Тип: реферат |
| Охранная система с дистанционным управлением | |
|
Содержание Введение 1. Обзор существующих схем 1.1 Простейшая система оповещения 1.2 Ультразвуковое охранное устройство 1.3 Охранная система с ... AVR-архитектура, на основе которой построены микроконтроллеры семейства AT90S, объединяет мощный гарвардский RISC-процессор с раздельным доступом к памяти программ и данных, 32 ... Периферия МК AVR включает: таймеры-счётчики, широтно-импульсные модуляторы, поддержку внешних прерываний, аналоговые компараторы, 10-разрядный 8-канальный АЦП, параллельные порты ... |
Раздел: Рефераты по информатике, программированию Тип: дипломная работа |
| Разработка системы теплоснабжения | |
|
города Самары ВВЕДЕНИЕ Развитие современной вычислительной техники, электроники и радиотехники позволяет создавать сложные системы, предназначенные ... С точки зрения программиста AVR представляет собой 8-разрядный RISC микроконтроллер, имеющий быстрый Гарвардский процессор, память программ, память данных, порты ввода/вывода и ... Тоже самое происходит и со стороны тепловычислителя: микроконтроллер обменивается командами с тепловычислителем через одну из микросхем DD4..DD5, т.к. тепловычислитель сопрягается ... |
Раздел: Рефераты по информатике, программированию Тип: реферат |
| Распределенная автоматизированная система управления | |
|
Содержание Содержание Введение 1. Общая и иерархическая структуры тепличного комбинатов. 2. Смесительное устройство 2.1. Математическая модель ... Все микроконтроллеры AVR имеют встроенную память программ с возможностью внутрисхемного программирования через последовательный интерфейс. Для целей управления микроконтроллеры AVR делает привлекательным их хорошо-развитая периферия, которая включает в себя: таймеры-счётчики, широтно-импульсные модуляторы, поддержку ... |
Раздел: Рефераты по коммуникации и связи Тип: дипломная работа |
| Автомобильные часы-термометр-вольтметр на базе микроконтроллера | |
|
КУРСОВОЙ ПРОЕКТ Автомобильные часы-термометр-вольтметр на базе микроконтроллера Содержание Введение 1. Описание объекта и функциональная спецификация ... Однокристальные (однокорпусные) микроконтроллеры представляют собой приборы, конструктивно выполненные в виде БИС и включающие в себя следующие составные части: микропроцессор ... Имеет 15 линий ввода/вывода, один 16-разрядный таймера/счетчика событий, полнодуплексный порт (UART) пять векторных двухуровневых прерываний, встроенный прецизионный аналоговый ... |
Раздел: Рефераты по коммуникации и связи Тип: курсовая работа |