Реферат: Віброізоляція та врівноваження машин
Содержание
1. Принципи віброізоляції
1.1 Віброзахисні системи з однією мірою свободи
2. Пружний підвіс твердого тіла
2.1 Схеми пружних підвісів і їх розрахунок
3. Динамічне гасіння коливань
3.1 Принципи динамічного гасіння коливань
3.2 Пружинний інерційний динамічний гаситель однієї маси
4. Характеристика віброізоляторів
5. Балансування роторів машин
5.1 Основні поняття
1. Принципи віброізоляції
1.1 Віброзахисні системи з однією мірою свободи
Елементи розрахункової моделі і їх характеристика. У розрахунковій моделі віброзахисної системи можна виділити три основні частини: джерело обурень (або стисло джерело), об'єкт захисту (об'єкт) і віброізолюючий пристрій (ВП). У простому випадку джерело і об'єкт вважаються твердими тілами, які рухаються поступально уздовж деякої осі X (рис.1а). Прикладені до системи зовнішні сили F (збудження), а також внутрішні сили R і R', з якими віброізолюючий пристрій, розташований між джерелом і об'єктом, впливає на них, вважаються спрямованнимі уздовж осі X; тим самим вісь X служить віссю даного віброізолюючого пристрою.
У більшості випадків маса одного з тіл системи - джерела або об'єкта - істотно перевищує масу іншого тіла - відповідно об'єкта або джерела. Тоді рух тіла "великої" маси може вважатися незалежним від руху тіла "малої" маси.
Якщо, зокрема, "велику" масу має об'єкт, то його, як правило, вважають нерухомим; рух системи викликається в цьому випадку прикладеними до джерела зовнішніми силами, що становлять силове збудження F = F (t) (рис.1б).
Якщо "велику" масу має джерело, то закон його руху ζ=ζ (t) можна вважати заданим; цей рух грає роль кінематичного збудження системи (точніше - об'єкта; рис.1в). У обох випадках тіло "великої" маси називають таким, що несе, або підставою, тіло "малої" маси - несомим.
Схему, наведену на рис.1б, як правило, використовують тоді, коли мова йде про захисти будівель, споруд, перекриттів або фундаментів від динамічних дій, що порушуються встановленими на них машинами з неврівноваженими рухомими частинами або іншим віброактивним устаткуванням.
Схему, зображену на рис.1в, використовують у завданнях віброзахисту приладів, апаратів, точних механізмів або верстатів, тобто устаткування, чутливого до вібрацій і встановлюваного на основах, що коливаються, або на рухомих об'єктах.
Віброізолюючий пристрій становить найважливішу
частину віброзахисної системи; його призначення полягає у створенні такого
режиму руху, що ініціюється заданими збудженнями, при якому реалізується мета
захисту об'єкта. У багатьох випадках це виявляється досяжним при використанні
безінерційного віброізолюючого пристрою, який для схем, зображених на рис.1,
становлять одноосьовий віброізолятор. Для такого віброізолятора реакції R і R'
збігаються за величиною (R = R'), причому в простому випадку, що розглядається
нижче, реакцію R можна вважати пропорційною деформації ![]() і швидкості деформації віброізолятора
і швидкості деформації віброізолятора
![]() :
:
![]() (1)
(1)
Залежність (1) описує лінійну характеристику простого безінерційного віброізолятора; коефіцієнти с і b називаються відповідно жорсткістю і коефіцієнтом демпфірування. При b = 0 (1) описує характеристику лінійного ідеально пружного елемента (пружини); при c = 0 - характеристику лінійного в'язкого демпфера.
Таким чином, модель віброізолятора з характеристикою (1) можна подати у вигляді паралельного з'єднання пружини і демпфера (рис.2).
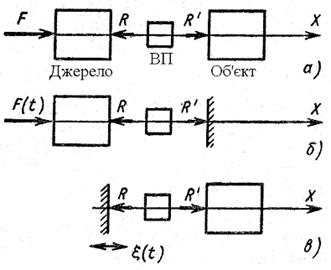
Рисунок 1 - Принципова схема віброзахисної системи: а - загальний випадок; б - силове збудження F = F (t); в - кінематичне збудження ζ=ζ (t)
Коефіцієнт жорсткості с віброізолятора з лінійною характеристикою (1) визначає власну частоту системи
![]() (2)
(2)
Демпфірувальні властивості системи, зображеної представленої на рис. 2, характеризуються коефіцієнтом демпфірування
![]() (3)
(3)
і відносним демпфіруванням
![]() (4)
(4)
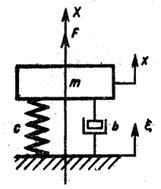
Рисунок 2 - Розрахункова модель простої віброзахисної системи з однією мірою вільностісвободи: m, x - відповідно маса і координата несомого тіла; F-сила, прикладена до несомого тіла; ζ - координата основи; с,b - відповідно жорсткість і коефіцієнт демпфірування віброізолятора
Ефективність віброзахисту. Коефіцієнти ефективності при гармонійному збудженні
Під ефективністю віброзахисту розуміється ступінь реалізації віброзахисним пристроєм цілей віброзахисту.
При силовому гармонійному збудженні
![]()
де F0 і ω - відповідно амплітуда і частота сили, що збуджує коливання; мета захисту може полягати у зменшенні амплітуди R0 сили, яка передається на нерухомий об'єкт
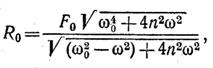 (5)
(5)
або в зменшенні амплітуди Х0 сталих вимушених коливань джерела:
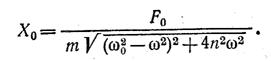 (6)
(6)
При кінематичному гармонійному збудженні
![]() (7)
(7)
мета захисту може полягати у зменшенні амплітуди абсолютного прискорення (перевантаження) об'єкта
 (8)
(8)
а також у зменшенні амплітуди його коливань щодо підстави:
 (9)
(9)
Кількісно ступінь реалізації мети віброзахисту можна охарактеризувати значеннями безрозмірних коефіцієнтів ефективності. Для розрахункової моделі, зображеної на рис.2, при силовому збудженні вводять коефіцієнти
 (10)
(10)
У разі кінематичного збудження розглядають коефіцієнти
 (11)
(11)
![]() Величини kR і k X називають
відповідно коефіцієнтом віброізоляції і коефіцієнтом динамічності.
Величини kR і k X називають
відповідно коефіцієнтом віброізоляції і коефіцієнтом динамічності.
Залежність kR, kX і kX’ від безрозмірних параметрів
і ν має вигляд

 (12)
(12)
Умови ефективності віброзахисту за критеріями kR, kX, kX’.
Умови ефективності віброзахисту за критеріями kR, kX, kX’ формулюють у вигляді нерівностей
![]() (13)
(13)
Оскільки вказані коефіцієнти залежать від
частоти, можна говорити про ефективність віброзахисту на даній частоті z або в заданому частотному діапазоні ![]() Аналіз
співвідношень (13) приводить до таких висновків.
Аналіз
співвідношень (13) приводить до таких висновків.
![]() 1. Ефективність віброзахисту за критерієм забезпечується при будь-якому
рівні демпфірування в частотному діапазоні
1. Ефективність віброзахисту за критерієм забезпечується при будь-якому
рівні демпфірування в частотному діапазоні
![]() (14)
(14)
![]() При будь-якому z з діапазону (14) ефективність тим вища, чим
слабкіше демпфірування; найкращу ефективність має ідеально пружний віброізолятор
(ν=0).
При будь-якому z з діапазону (14) ефективність тим вища, чим
слабкіше демпфірування; найкращу ефективність має ідеально пружний віброізолятор
(ν=0).
2. Ефективність віброзахисту за критерієм також забезпечується в діапазоні (14) при будь-яких значеннях ν.
При віброзахист ефективний у всьому

![]()
діапазоні частот

при ефектівність має місце в діапазоні
![]() (15)
(15)
![]() При
фіксованій величині z ефективність
підвищується із зростанням демпфірування.
При
фіксованій величині z ефективність
підвищується із зростанням демпфірування.
3. Виброзахист за критерієм ефективний в усьому частотному діапазоні,
 (16) якщо, а при - в діапазоні
(16) якщо, а при - в діапазоні 
Ступінь ефективності на фіксованій частоті підвищується із зростанням демпфірування; у найгіршому випадку (при ν = 0) діапазон ефективності відповідає смузі
![]() (17)
(17)
Залежності при 
фіксованих ν наведені на рис.3-5. Ці залежності можна розглядати як амплітудно-частотні характеристики даної системи, відповідно при кінематичному і силовому збудженні коливань об'єкта віброзахисту. На Рис.6 і 7 зображені фазочастотні характеристики віброзахисної системи
 , (18)
, (18)
 (19)
(19)
![]() що становлять залежність
фазових зрушень процесів відповідно
що становлять залежність
фазових зрушень процесів відповідно ![]() [формула (18)] і [формула (19)] відносно
збуджень F (t) і ζ (t).
[формула (18)] і [формула (19)] відносно
збуджень F (t) і ζ (t).
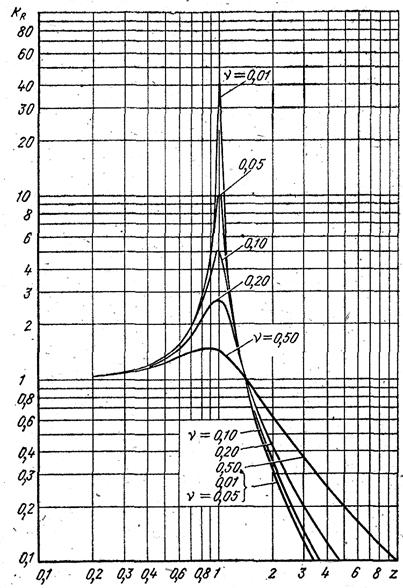
Рисунок 3 - Залежність коефіцієнта віброізоляції kR від відносної частоти z
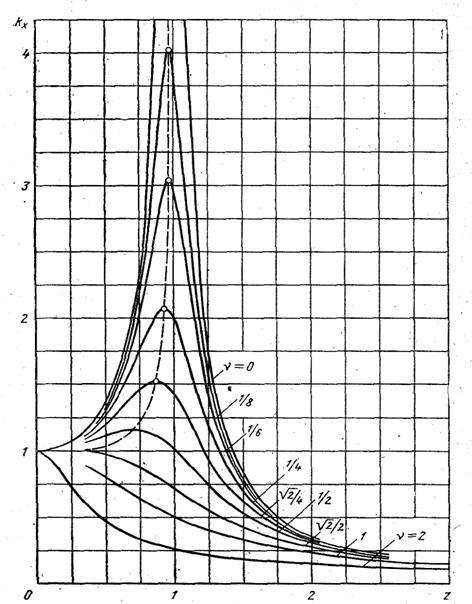
Рисунок 4 - Залежність коефіцієнта ефективності kХ від відносної частоти z
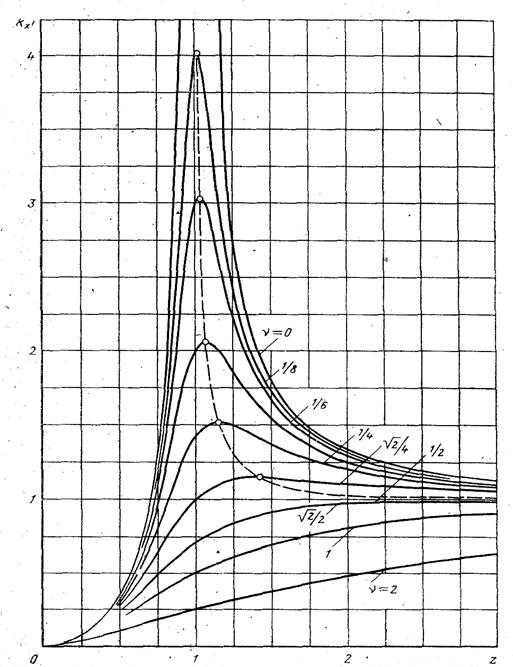
Рисунок 5 - Залежність коефіцієнта ефективності kX’ від відносної частоти z
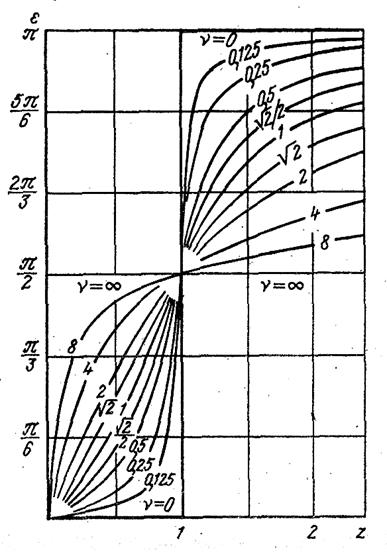
Рисунок 6 - Залежність фазового зрушення ε від відносної частоти z
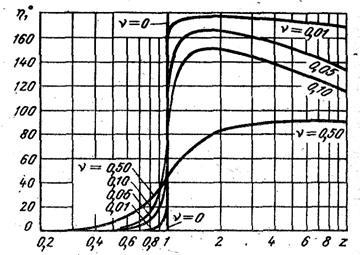
Рисунок 7 - Залежність фазового зрушення η від відносної частоти z
2. Пружний підвіс твердого тіла
2.1 Схеми пружних підвісів і їх розрахунок
Загальні положення. Віброізоляцію як принцип захисту устаткування, чутливого до динамічних навантажень, широко застосовують у різних галузях техніки. При цьому в одних випадках системи віброізоляції можна конструювати в комплексі з об'єктом, що захищається, як його невід'ємну частину (наприклад, підвіси залізничних вагонів і автомобілів, корабельних дизельних установок і т.п.); у інших випадках, наприклад при захисті від вібрації радіоелектронної апаратури, де одні і ті ж прилади і устаткування залежно від місць установки піддаються абсолютно різним за формою або інтенсивністю збудженням, проектування віброзахисних систем має індивідуальний характер і виконують його за наслідками статичного і динамічного розрахунків.
У простій моделі віброзахисної системи, що дозволяє вивчити просторовий рух джерела і об'єкта, обидва ці тіла вважаються абсолютно твердими. Сукупність віброізоляторів, що їх сполучають, утворює пружний підвіс несомого тіла. Підвіси розрізняються схемами, тобто числом віброізоляторів, орієнтуванням їх осей, прихильністю точок кріплення до джерела і об'єкта.
Розрахунок підвісу, як правило, складається з двох частин: статичного, який полягає в обчисленні статичних реакцій і статичних деформацій віброізоляторів, і динамічного, такого, що полягає у визначенні власних частот пружно-підвішеного несомого тіла і обчисленні характерних параметрів його руху.
Статичні і динамічні реакції віброізоляторів. Характеристикою віброізолятора називається залежність його реакції від деформації пружного елемента. Якщо деформація обумовлена дією статичних сил, то відповідна характеристика буде статичною. У разі динамічних навантажень розрізняють динамічні і ударні характеристики.
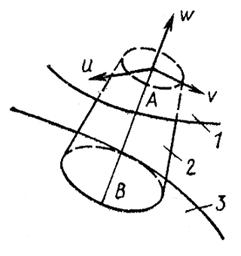
Рисунок 1 - Схема кріплення віброізолятора: 1 - об'єкт; 2 - віброізолятор; 3 – джерело
Рисунок 2 - Розрахункова схема підвісу
Всякий віброізолятор має три взаємно ортогональні головні осі жорсткості u, v і w, причому вісь w проходить через точки кріплення віброізолятора до джерела і об'єкта і, як правило, збігається з лінією дії статичного навантаження (рис.1). Властивість головних осей полягає в тому, що сила, спрямована по одній з них, викликає деформацію тільки по тій самій осі. Відповідно до цього підвіс з N віброізоляторів можна вважати еквівалентним підвісу з 3N пружних елементів, кожен з яких реагує лише на стиснення-розтягування. Нумерацію цих елементів зручно вводити таким чином: номерами від 1 до N позначати елементи, що описують пружні властивості віброізоляторів в осьових напрямах ш, а номери від N + 1 до 3N привласнити елементам, що характеризують роботу віброізоляторів у поперечних напрямах u і v.
Динамічна реакція Rj j-го
пружного елемента залежить від його деформації ![]() і
швидкості деформації
і
швидкості деформації ![]() (j = 1,
2,…, 3N); таким чином, рівняння
динамічної характеристики має вигляд
(j = 1,
2,…, 3N); таким чином, рівняння
динамічної характеристики має вигляд
![]() (1)
(1)
Для металевих (пружинних) і резинометалічних
віброізоляторів статичні характеристики можуть бути отримані з (1) при ![]()
![]()
У окремому випадку лінійних характеристик мають місце співвідношення
![]() (2)
(2)
де cj, bj - коефіцієнти жорсткості і демпфірування j-го пружного елемента;
cj0 - його статична жорсткість, яку у відмічених вище випадках допустимо ототожнювати з динамічною жорсткістю cj.
Рівняння статики віброзахисних систем. Виберемо нерухому систему координат OXYZ, що збігається з головними центральними осями інерції CΞHZ тіла при рівновазі останнього. Тоді рівняння статики просторового підвісу (рис.2) наберуть вигляду
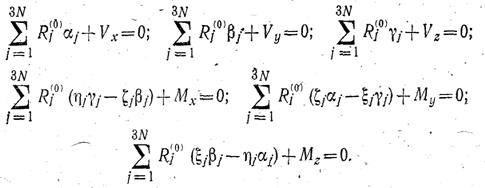 (3)
(3)
Тут
![]() - статична реакція j-го пружного елемента;
- статична реакція j-го пружного елемента;
![]() - напрямні косинуси
його осі;
- напрямні косинуси
його осі;
![]() - координати точки
кріплення j-го віброізолятора до
- координати точки
кріплення j-го віброізолятора до
несомого тіла;
![]() - проекції на осі OXYZ головного вектора і головного моменту сил, що створюють
статичне навантаження.
- проекції на осі OXYZ головного вектора і головного моменту сил, що створюють
статичне навантаження.
Рівняння статики односпрямованого підвісу у разі, коли статичним навантаженням є вага тіла Р, а площина OXY розташована горизонтально, виходить з (3) при
![]()
![]()
і мають вигляд
 (4)
(4)
![]() Статичний
розрахунок підвісу. Визначення розрахункових статичних реакцій. При фіксованих
точках кріплення віброізоляторів до тіла невідомими в рівняннях статики будуть
статичні реакції), число яких, як правило, перевищує число рівнянь (3) або (4).
Відповідні підвіси називаються статично невизначеними. Статична
визначеність підвісу має місце лише у разі N = 1 (просторова схема), N = 2
(плоска односпрямована схема) і N = 3 (просторова односпрямована схема).
Статичний
розрахунок підвісу. Визначення розрахункових статичних реакцій. При фіксованих
точках кріплення віброізоляторів до тіла невідомими в рівняннях статики будуть
статичні реакції), число яких, як правило, перевищує число рівнянь (3) або (4).
Відповідні підвіси називаються статично невизначеними. Статична
визначеність підвісу має місце лише у разі N = 1 (просторова схема), N = 2
(плоска односпрямована схема) і N = 3 (просторова односпрямована схема).
![]()
![]()
![]() Реакції
статично визначеного підвісу обчислюють безпосередньо з рівнянь статики. Якщо підвіс статично невизначений, до рівнянь статики
додають умови розподілу статичного навантаження, що не суперечать ним, в
числі, необхідному для однозначного визначення всіх. Як правило, додаткові
умови мають вид лінійних рівнянь відносно. Реакції підвісу, що задовольняють
рівнянням статики і додатковим умовам розподілу статичного навантаження, називаються
розрахунковими статичними реакціями. Основні вимоги до динамічних
властивостей підвісу. Раціонально спроектований підвіс повинен перш за все
виключати можливість виникнення резонансних коливань системи. За аналогією до
висновків, отриманих для віброзахисних систем з простою розрахунковою моделлю, необхідно,
щоб при відносно низькому рівні демпфірування частоти домінуючих гармонік
зовнішнього обурення перевищували найбільшу з власних частот системи. Підвіси,
що реалізують ці умови, називають м'якими. Якість віброзахисту значною мірою залежить
також від взаємної близькості власних частот системи. Проектуючи, підвіси на основі
принципу "зближення" власних частот (у ідеалі - до їх повного збігу),
можна не тільки підвищити ступінь настроювання від резонансів, але і зробити
несоме тіло менш чутливим (по переміщенню) до зміни напряму статичного
навантаження.
Реакції
статично визначеного підвісу обчислюють безпосередньо з рівнянь статики. Якщо підвіс статично невизначений, до рівнянь статики
додають умови розподілу статичного навантаження, що не суперечать ним, в
числі, необхідному для однозначного визначення всіх. Як правило, додаткові
умови мають вид лінійних рівнянь відносно. Реакції підвісу, що задовольняють
рівнянням статики і додатковим умовам розподілу статичного навантаження, називаються
розрахунковими статичними реакціями. Основні вимоги до динамічних
властивостей підвісу. Раціонально спроектований підвіс повинен перш за все
виключати можливість виникнення резонансних коливань системи. За аналогією до
висновків, отриманих для віброзахисних систем з простою розрахунковою моделлю, необхідно,
щоб при відносно низькому рівні демпфірування частоти домінуючих гармонік
зовнішнього обурення перевищували найбільшу з власних частот системи. Підвіси,
що реалізують ці умови, називають м'якими. Якість віброзахисту значною мірою залежить
також від взаємної близькості власних частот системи. Проектуючи, підвіси на основі
принципу "зближення" власних частот (у ідеалі - до їх повного збігу),
можна не тільки підвищити ступінь настроювання від резонансів, але і зробити
несоме тіло менш чутливим (по переміщенню) до зміни напряму статичного
навантаження.
Істотною характеристикою підвісу є ступінь зв'язаності власних коливань системи. За інших однакових умов найбільш переважними є підвіси з повною розв'язкою частот, коли обурення по будь-якій з узагальнених координат викликає коливання лише по цій узагальненій координаті; при неможливості повної розв'язки слід прагнути до розв'язки часткової. Як приклад розглянемо вільні коливання плоскої системи з двома мірами вільності, показаної на рис.3. Позначимо через с1 і с2 коефіцієнти жорсткості пружин, а через m і ρ - масу і радіус інерції тіла щодо осі, що проходить перпендикулярно до площини креслення через центр тяжіння. За узагальнені координати візьмемо вертикальне переміщення центра тяжіння тіла у і кут повороту тіла φ. Подібна система дуже часто має місце при проектуванні систем віброізоляції.
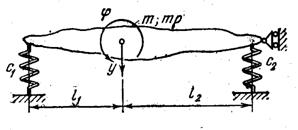
Рисунок 3 - Модель виброзахисної системи
Для складання рівнянь коливань запишемо кінетичну і потенціальну енергію коливань у вигляді
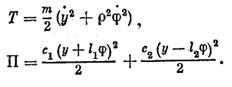
Відповідно до цього рівняння Лагранжа набирають форми

Тепер припустимо, що параметри даної системи задовольняють два прості (і реально здійсненні) співідношення:
![]() (5)
(5)
тоді замість отриманих діференційних рівнянь маємо
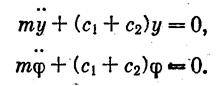 (6)
(6)
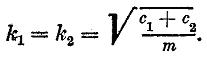
Отже, інерційні коефіцієнти і узагальнені коефіцієнти жорсткості в даному випадку визначаються за формулами:

Тоді обидві частоти даної системи дорівнюють одна одній. Втім, це видно безпосередньо з рівнянь (6), оскільки
Зважаючи на незалежність рівнянь (6), постійні інтегрування одного рівняння не пов'язані з постійними інтегрування іншого рівняння:
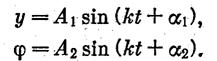
![]()
Для визначення постійних служать початкові умови.
3. Динамічне гасіння коливань
3.1 Принципи динамічного гасіння коливань
Метод динамічного гасіння коливань полягає в приєднанні до об'єкта віброзахисту додаткових пристроїв з метою зміни його вібраційного стану. Робота динамічних гасителів базується на формуванні силових дій, переданих на об'єкт. Цим динамічне гасіння відрізняється від іншого способу зменшення вібрації, що характеризується накладенням на об'єкт додаткових кінематичних зв'язків, наприклад, закріплення окремих його точок.
Зміна вібраційного стану об'єкта при приєднанні динамічного гасителя може здійснюватися як шляхом перерозподілу коливальної енергії від об'єкта до гасителя, так і у напрямі збільшення розсіяння енергії коливань. Перше реалізується зміною настроювання системи об 'єкт-гаситель стосовно частот вібраційних збуджень, що діють шляхом корекції пружно-інерціоних властивостей системи. В цьому випадку приєднувані до об'єкта пристрої називають інерційними динамічними гасителями. Інерційні гасителі застосовують для пригнічення моногармонійних або вузькосмугових випадкових коливань. предпочтительным
При дії вібраційних навантажень ширшого частотного діапазону переважним виявляється другий спосіб, що базуеться на підвищенні диссипативних властивостей системи шляхом приєднання до об'єкта додаткових спеціально демпфованих елементів. Динамічні гасителі диссипативного типу отримали назву поглиначів коливань. Можливі і комбіновані способи динамічного гасіння, що використовують одночасну корекцію пружно-інерціонних і дисипативних властивостей системи. В цьому випадку говорять про динамічні гасителі з тертям.
При реалізації динамічних гасителів протидія коливанням об'єкта здійснюється за рахунок реакцій, передаваних на нього приєднаними тілами. З цієї причини значні зусилля при обмежених амплітудах мас, що коригують, можуть бути досягнуті лише при великій масі (моменті інерції) приєднаних тіл, складаючих, як правило, зазвичай ~5-20% приведеної маси (моменту інерції) початкової системи за відповідною формою коливань, в околі частоти, гасіння якої виконується.
Як правило, динамічні гасителі використовують для досягнення локального ефекту: зниження віброактивності об'єкта в місцях кріплення гасителів. Часто це може бути пов'язано навіть з погіршенням вібраційного стану об'єкта в інших, менш відповідних місцях.
Динамічні гасителі можуть бути конструктивно реалізовані на основі пасивних елементів (мас, пружин, демпферів) і активних, таких, що мають власні джерела енергії. В останньому випадку мова йде про застосування систем автоматичного регулювання, що використовують електричні, гідравлічні і пневматичні керовані елементи. Вдалим є їх комбінування з пасивними пристроями. Використання активних елементів розширює можливості динамічного віброгасіння, оскільки дозволяє проводити безперервне підстроювання параметрів динамічного гасителя у функції збуджень, що діють, і, отже, здійснювати гасіння в умовах змінних вібраційних навантажень. Аналогічний результат може бути досягнутий іноді і за допомогою пасивних пристроїв, що мають нелінійні характеристики.
Динамічне гасіння застосовне для всіх видів коливань: повдовжніх, згинальних, крутних і т.д.; при цьому вид коливань, здійснюваних приєднаним пристроєм, як правило, аналогічний виду пригнічуваних коливань.
3.2 Пружинний інерційний динамічний гаситель однієї маси
Простий динамічний гаситель виконується у вигляді твердого тіла, пружно-приєднаного до демпфованого об'єкта в точці, коливання якої потрібно погасити. Істотний вплив на результуючі характеристики руху об'єкта з гасителем надають дисипативні втрати в гасителеві.
Почнемо розгляд з простого випадку (рис.1а), коли демпфований об'єкт моделюється зосередженою масою m, прикріпленою до основи лінійною пружиною з жорсткістю с. Коливання об'єкту збуджуються або періодичною силою
![]() , що діє на об'єкт,
або вібраціями основи згідно із законом
, що діє на об'єкт,
або вібраціями основи згідно із законом
За допомогою ![]() співвідношення
співвідношення ![]() можна
здійснити еквівалентну заміну кінематичного збудження силовим збудженням.
можна
здійснити еквівалентну заміну кінематичного збудження силовим збудженням.

Рисунок 1 - Динамічне гасіння коливань пружинним гасителем: а, б - подовжніх; 1 - демпфований об'єкт; 2 – гаситель
Під дією прикладеного збудження об'єкт здійснює одновимірні коливання з амплітудою
де![]() - власна частота
демпфованого об'єкта.
- власна частота
демпфованого об'єкта.
При коливання об'єкта істотно зростають. Для їх зменшення до нього приєднується динамічний гаситель 2 (рис.1б), що має зосереджену масу mг, пружину з жорсткістю Сг і в'язкий демпфер з коефіцієнтом тертя bг.
Диференціальні рівняння коливань системи з гасителем мають такий вигляд:
 (1)
(1)
де х, хг - абсолютні координати переміщень мас.
Визначаючи розв’язок системи рівнянь (1) у формі
![]() (2)
(2)
де а, аг - комплексні числа, після перетворень отримаємо такі вирази для
амплітуд коливань об'єкта гасителя:
 (3)
(3)
При цьому введені позначення

Тут ![]() - критичне
демпфірування парціальних коливань динамічного гасителя.
- критичне
демпфірування парціальних коливань динамічного гасителя.
З (3) випливає, що при
![]() (4)
(4)
тобто при настроюванні парціальної частоти пружних коливань гасителя ωг на частоту зовнішнього збудження ω "залишкові" коливання об'єкта виявляються пропорційними втратам в гасителеві:
 (5)
(5)
Таким чином, при вказаній настройці при величина![]()
![]()
тобто коливання демпфованої системи повністю усуваються. Згідно з (4) реакція гасителя при цьому дорівнює по величині зовнішньому збудженню:
![]() (6)
(6)
і, як легко показати, протилежна йому за знаком, що і забезпечує відмічену компенсацію коливань.
На рис.2 наведені амплітудно-частотні
характеристики даної системи з гасителем (див. рис.1б), побудовані при. Для
порівняння ![]() на рис.2а
штрихованою лінією нанесена амплітудно-частотна характеристика об'єкта (див. рис.1
а). При вибраній настройці приєднання гасителя утворює таку результуючу систему
з двома ступенями вільності, у якої на частоту
на рис.2а
штрихованою лінією нанесена амплітудно-частотна характеристика об'єкта (див. рис.1
а). При вибраній настройці приєднання гасителя утворює таку результуючу систему
з двома ступенями вільності, у якої на частоту ![]() збудження припадає
антирезонанс. При цьому частота антирезонансу збігається також з резонансною
частотою початкової системи. Остання обставина не є обов'язковою, оскільки
настройка забезпечує антирезонанс на будь-якій фіксованій частоті збудження,
проте ефект динамічного гасіння виявляється найсильніше саме при
збудження припадає
антирезонанс. При цьому частота антирезонансу збігається також з резонансною
частотою початкової системи. Остання обставина не є обов'язковою, оскільки
настройка забезпечує антирезонанс на будь-якій фіксованій частоті збудження,
проте ефект динамічного гасіння виявляється найсильніше саме при
![]() ,
, ![]() оскільки при коливання
демпфованого об'єкту за відсутності гасителя не такі значні.
оскільки при коливання
демпфованого об'єкту за відсутності гасителя не такі значні.
При правильній настройці інерційного пружинного гасителя (ωг=ω) співвідношення (6) забезпечується при будь-якій амплітуді G0 зовнішнього збудження, тобто даний інерційний гаситель здійснює стеження за інтенсивністю збудження, змінюючи відповідним чином амплітуду своїх коливань | аг |.
Якщо розмах коливань гасителя лімітується міцністними або габаритними обмеженнями, то його зменшення згідно з (6) може бути досягнуте збільшенням маси гасителя mг.
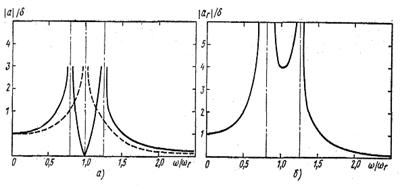
Рисунок 2 - Амплітудно-частотні характеристики системи з одним ступенем вільності, забезпеченої лінійним пружинним гасителем: а - демпфований об'єкт; б – гаситель
![]() Специфіка
інерційного динамічного гасіння, пов'язана із здійсненням умов антирезонансу,
приводить до того, що по обидва боки від настроювальної частоти пружинного
гасителя виникають резонансні частоти (рис.2), тому розлад системи з гасителем,
викликаний, наприклад, зміною частоти збудження або параметрів системи, може
повністю змінити ситуацію, привівши до небезпечного розгойдування.
Специфіка
інерційного динамічного гасіння, пов'язана із здійсненням умов антирезонансу,
приводить до того, що по обидва боки від настроювальної частоти пружинного
гасителя виникають резонансні частоти (рис.2), тому розлад системи з гасителем,
викликаний, наприклад, зміною частоти збудження або параметрів системи, може
повністю змінити ситуацію, привівши до небезпечного розгойдування.
Чутливість системи до вказаного розладу визначається залежністю власних частот системи з гасителем від параметрів системи. З виразу для власних частот випливає, якщо прирівняти до нуля знаменник в (4) при і розв’язати отримане рівняння відносно ω, позначив ω через ωj.

На рис.3 наведена ця залежність. Із збільшенням параметра μ відмічена чутливість може бути декілька знижена. Проте практична область застосування простого інерційного пружинного гасителя - пригнічення коливань постійної частоти, що виникають, наприклад, при роботі синхронних електродвигунів, генераторів змін струму і так далі. Згідно з (5) ефективність його роботи при правильній настройці (4) досягається мінімізацією дисипативних втрат в гасителеві.
Рисунок 3 - Вплив відношення μ мас гасителя і об'єкта на власні частоти системи з гасителем
![]()
Конструктивне збільшення μ може бути здійснено, наприклад, установкою на об'єкті декількох гасителів, налаштованих однаково на частоту збудження.
4. Характеристика віброізоляторів
Класифікація віброізоляторів. Компонування підвісу здійснюється, як правило, з віброізоляторів, що випускаються серійно, розрізняються упругодемпфірувальними характеристиками, різним поєднанням віброізолючих і ударозахисних властивостей, довговічністю, здатністю функціонувати в тих або інших кліматичних умовах, а також чисто конструктивними особливостями - габаритами, способом монтажу і так далі. Всі перелічені властивості певною мірою зберігаються для віброізоляторів одного і того ж виду всіх типорозмірів.
Сучасні віброізолятори прийнято класифікувати в основному за виглядом або способом введення демпфірування або за матеріалом пружного елемента. Розрізняють гумометалеві, пружинні і суцільнометалеві віброізолятори з повітряним або сухим тертям, а також недемпфовані. До останніх відносять віброізолятори, демпфірвальні властивості яких визначаються внутрішнім тертям в матеріалі пружного елемента.
Гумометалеві віброізолятори. Пружним елементом віброізоляторів цього типу є фасонний гумовий масив, сполучений з деталями металевої арматури за допомогою вулканізації. Переваги резинометалічних віброізоляторів полягають в простоті їх конструкції, в широкому діапазоні зміни їх пружних характеристик, що визначаються як властивостями використовуваної гуми, так і конфігурацією пружного елементу, в можливості довільного орієнтування віброізоляторів щодо основи. Особливі властивості гуми визначають, проте, і їх недоліки; зміна динамічних властивостей при тривалій експлуатації, пов'язана з так званим "старінням" гуми; недостатня надійність з'єднання гумового масиву з металевою арматурою; погіршення віброзахисних властивостей в умовах, що відрізняються від нормальних (наприклад, при підвищеній або зниженій температурі і вологості); недостатнє в окремих випадках демпфірування; неможливість використання в атмосфері, що містить пари бензину, масла і тому подібне.
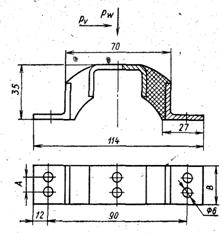
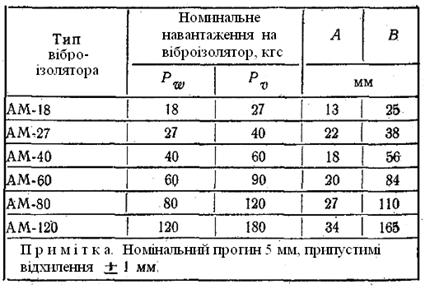
Віброізолятори типу AM. Гумометалеві віброізолятори AM використовують для віброзахисту порівняно великовантажного устаткування. Їх гумовий масив, що працює на зрушення, привулканізований до металевої арматури, що складається з двох кутів (для кріплення до основи) і скоби таврового профілю (для з'єднання з об'єктом). Креслення, основні розміри і параметри віброїзоляторів цієї серії, названі також скобовими, зображені на рис.1, статичні характеристики в осьовому напрямі - в табл.1. Конструкція забезпечує задовільну роботу і в бічному напрямі.
![]()
Рисунок 1 - Віброізолятор типу AM
Таблиця 1 - Статичні характеристики в осьовому напрямі
віброізолятор типу АМ
Віброізолятори типу АКСС. Ці віброізолятори призначені для захисту достатньо масивного устаткування; їх пружний елемент виконаний з маслостійкої гуми і допускає тривалу експлуатацію в умовах зміни температури від - 5 °С до +70 °С. Підвищена жорсткість віброізоляторів типу АКСС робить їх ефективними при захисті від інтенсивних ударних дій. Креслення і розміри віброізоляторів наведені на рис.2, параметри, що характеризують їх віброзахисні властивості - в табл.2. і на рис.3.
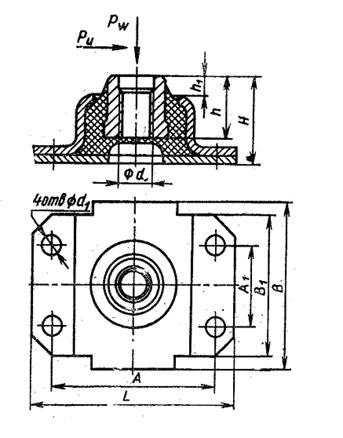
Рисунок 2 - Віброізолятор типу АКСС
Таблиця 2 - Статичні і динамічні характеристики віброізоляторів
типу АКСС
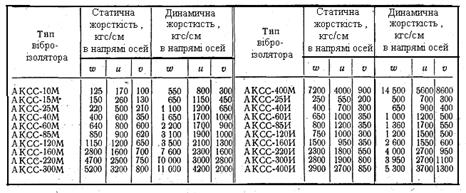
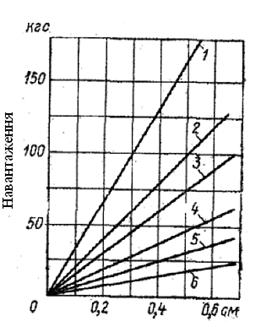
Рисунок 3 - Статичні характеристики віброізоляторів: 1 - АМ-120; 2 - AМ-80; 3 - АМ-60; 4 - АМ-40; 5 - АМ-27; 6 - AМ-18
5. Балансування роторів машин
5.1 Основні поняття
Типи роторів. Ротором є тіло, що утримується при обертанні своїми несучими поверхнями в опорах. Несучими є поверхні цапф або поверхні, що їх замінюють. Пряма, що сполучає центри тяжіння контурів поперечних перетинів середин несучих поверхонь, називається віссю ротора. За числом опор ротори бувають дво- і багатоопорними. Ротор може бути міжопорним, якщо значна частина його маси (М) розміщена між опорами, консольним, якщо істотна частина його маси знаходиться за однією з крайніх опор, і двоконсольним при розміщенні істотної частини його маси за двома крайніми опорами.
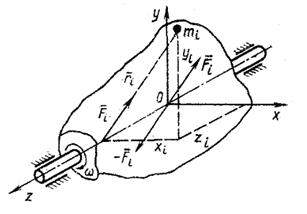
Рисунок 1 - Схема сил, що діють на ротор
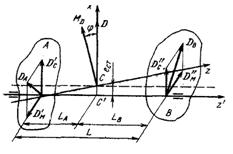
Рисунок 2 - Еквівалентна система з двох дисбалансів
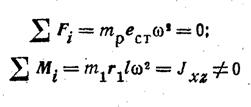
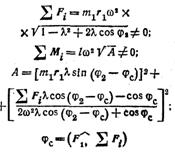
Умови динамічної рівноваги. Не схильне до дії зовнішніх сил тіло, що обертається з постійною кутовою швидкістю навколо однієї зі своїх головних центральних осей інерції, знаходиться в стані динамічної рівноваги, що характеризується рівністю нулю головного вектора і моменту неврівноважених сил (рис.1):
 (1)
(1)
Тут![]() - відповідно
неврівноважена точкова маса, її
- відповідно
неврівноважена точкова маса, її
ексцентриситет і дисбаланс;
![]() - маса і
ексцентриситет ротора;
- маса і
ексцентриситет ротора;
D, MD - головний вектор і головний момент дисбалансів.
Для виконання умови (1) необхідно і досить,
щоб вісь обертання ротора проходила через йог ![]() о центр мас і щоб
вісь обертання ротора збігалася з однією із його головних осей інерції, тобто
щоб дорівнювавали нулю його відцентрові моменти інерції. При обертанні ротора
навколо осі, що не звігається з головною центральною віссю інерції, він стає
неврівноваженим. Неврівноваженість - це стан ротора, що характеризується
таким розподілом мас, який під час обертання викликає змінні навантаження на
опорах ротора і його вигин. Мірою неврівноваженості вважають дисбаланс D.
Для порівняння роторів різних мас вводять питомий дисбаланс, що чисельно
дорівнює ексцентриситету:
о центр мас і щоб
вісь обертання ротора збігалася з однією із його головних осей інерції, тобто
щоб дорівнювавали нулю його відцентрові моменти інерції. При обертанні ротора
навколо осі, що не звігається з головною центральною віссю інерції, він стає
неврівноваженим. Неврівноваженість - це стан ротора, що характеризується
таким розподілом мас, який під час обертання викликає змінні навантаження на
опорах ротора і його вигин. Мірою неврівноваженості вважають дисбаланс D.
Для порівняння роторів різних мас вводять питомий дисбаланс, що чисельно
дорівнює ексцентриситету: ![]()
Види неврівноваженості. Залежно від взаємного розташування осі ротора z' і його головної центральної осі інерції z розрізняють три види неврівноваженості. При статичній неврівноваженості осі z' і z паралельні. Ця неврівноваженість повністю визначається головним вектором дисбалансів D або ексцентриситетом eст.
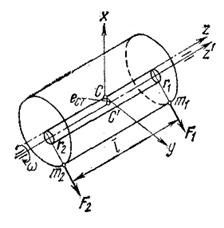
Рисунок 3 - Cхема ротора з неврівноваженими масами
Формули для визначення головного вектора і головного моменту системи сил:

При моментній неврівноваженості вісь ротора і його головна центральна вісь інерції перетинаються в центрі мас. Моментна неврівноваженість повністю визначається головним моментом дисбалансів ротора MD або його відцентровими моментами інерції.
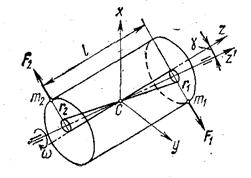
Рисунок 4 - Cхема ротора з неврівноваженими масами
Формули для визначення головного вектора і головного моменту системи сил:
При динамічній неврівноваженості, що складається із статичної і моментної, вісь ротора і його головна центральна вісь інерції перетинаються не в центрі мас ротора. Динамічна неврівноваженість визначається головним вектором і моментом дисбалансів ротора.
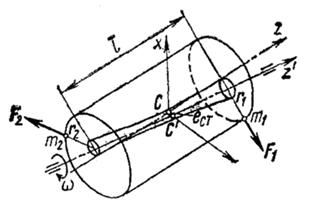
Рисунок 5 - Cхема ротора з неврівноваженими масами
Формули для визначення головного вектора і головного моменту системи сил моменту системи сил:
Еквівалентні системи дисбалансів. Головний вектор і момент дисбалансів можна замінити еквівалентною системою, що складається з двох дисбалансів: DА і DB, розташованих в двох довільних, перпендикулярних до осі ротора площинах А і В (рис.2). Розрахунок еквівалентної системи проводиться за правилами статики:
![]()
Перпендикулярна до осі ротора площина, в якій задають значення і кут дисбалансу, називається площиною приведення дисбалансу.
Часто необхідно переходити від однієї еквівалентної системи до іншої, розміщеної в інших площинах приведення. При такому переході можуть змінюватися не тільки величини дисбалансів, а і кути між ними.
Балансування ротора. Оскільки неврівноваженість твердого тіла може бути замінена еквівалентною системою двох дисбалансів, розташованих в двох поперечних перетинах ротора, ротор завжди може бути приведений у стан динамічної рівноваги за допомогою двох коригуючих мас, розташованих в двох довільних площинах корекції. Коригуючі маси можна додавати або видаляти з тіла ротора або переміщати по ньому. Процес визначення значень і кутів дисбалансів ротора і зменшення їх коригуванням мас називають балансуванням ротора. Вимірювати дисбаланс і зменшувати його при балансуванні можна послідовно як самостійні операції і одночасно, як при автоматичному балансуванні.
Балансування можна виконувати двома методами.
1. Коригуючі маси встановлюють, видаляють або переміщають так, щоб головна центральна вісь інерції наближалася до осі ротора. Коригування мас проводять в одній або декількох точках однієї площини корекції або в декількох площинах корекції одночасно або послідовно. Коригування мас проводять свердлінням, фрезеруванням, наплавленням, наварюванням, загвинчуванням або вигвинчуванням гвинтів, випалюванням електричною іскрою, променем лазера, електронним пучком, електролізом і тому подібне.
2. Цапфи переміщають або обробляють так, щоб вісь ротора збігалася з головною центральною віссю інерції. Метод має обмеження у застосуванні, оскільки він викликає загальний зсув ротора, неприпустимий, наприклад, через зміну геометрії зубчастих зчеплень і лабіринтових ущільнень, зазорів між ротором і статором, небезпеки зачіпання в апараті лопатки турбін і так далі.
Дисбаланси, що мають місце до і після балансування, називають відповідно початковим і залишковим дисбалансами. Найбільший залишковий дисбаланс, взятий за норми балансування, називається допустимим дисбалансом або відповідно допустимим питомим дисбалансом.
Гнучкість ротора. Ротори ділять на жорсткі
і гнучкі залежно від використовуваних методів балансування. Жорстким
вважають ротор, який може бути збалансований на частоті обертання nб, меншій за першу критичну n1 в двох довільних площинах корекції
і у якого залишкові дисбаланси не перевищуватимуть допустимих на всіх частотах
обертання до найбільшої експлуатаційної ne. Іноді жорстким називають ротор,
у якого ![]()
![]() . Значення коефіцієнта
k береться
0,2-0,7. Відповідно гнучким вважають ротор, який не може бути збалансований на
частоті nб<n1 в двох довільних площинах
корекції так, щоб значення його залишкових дисбалансів не перевищували допустимих
на деяких частотах обертання до ne.
. Значення коефіцієнта
k береться
0,2-0,7. Відповідно гнучким вважають ротор, який не може бути збалансований на
частоті nб<n1 в двох довільних площинах
корекції так, щоб значення його залишкових дисбалансів не перевищували допустимих
на деяких частотах обертання до ne.
Методи балансування жорстких і гнучких роторів істотно відрізняються. Існують ротори з геометрією або масою, що змінюється, для яких застосовують спеціальні методи балансування, зокрема автоматичне балансування на ходу.