Курсовая работа: Анализ конструкции и методика расчета автомобиля ВАЗ-2108
Федеральное агентство по образованию
Волгоградский Государственный Технический Университет
Кафедра «Автомобильный транспорт»
Автомобили
Курсовой проект
«Анализ конструкции и методика расчета автомобиля ВАЗ-2108»
Выполнил:
студент гр. АР-513
Солдатов П.В
Проверил:
проф. Железнов Е.
Волгоград 2010
Содержание
Техническая характеристика автомобиля
1 Трансмиссия автомобиля
1.1 Сцепление
1.2 Коробка передач автомобиля
1.3 Главная передача автомобиля
1.4 Дифференциалы трансмиссии автомобиля
1.5 Силовые приводы, валы и полуоси трансмиссии автомобиля
2 Ходовая часть шасси автомобиля
2.1 Подвески автомобиля
2.2 Колеса и шины автомобиля
2.3 Полуоси и балка
2.4 Несущая система автомобиля
3 Система управления шасси автомобиля
3.1Тормозная система автомобиля
3.2 Рулевое управление автомобиля
Список использованных источников
Технические характеристики автомобилей семейства ваз 2108
Таблица 1 – Технические характеристики автомобиля ВАЗ 2108
| Общие данные | |
| Модель | ВАЗ-2108 |
| Год выпуска | 1984-1994 |
| Тип кузова | Хэтчбэк |
| Количество дверей/мест | 3/5 |
| Снаряженная масса, кг | 900 |
| Полная масса, кг | 1325 |
| Максимальная скорость, км/ч | 148 |
| Время разгона с места до 100 км/ч, с | 16,0 |
| Объем багажника, min/max, л | 330/600 |
| Размеры, мм | |
| Длина | 4006 |
| Ширина | 1650 |
| Высота | 1402 |
| Колесная база | 2460 |
| Колея передняя/задняя | 1400/1370 |
| Дорожный просвет | 170 |
| Двигатель | |
| Тип | Бензиновый с карбюратором |
| Расположение | Cпереди поперечно |
| Рабочий объем, куб.см | 1300 |
| Степень сжатия | 9,9 |
| Число и расположение цилиндров | 4 в ряд |
| Диаметр цилиндра х ход поршня, мм | 76 x 71 |
| Число клапанов | 8 |
| Мощность, л.с./ об/мин | 64/5600 |
| Максимальный крутящий момент, Нхм / об/мин | 94/3500 |
| Трансмиссия | |
| Тип | Механическая 5-ступенчатая |
| Привод | На передние колеса |
| Подвеска | |
| Передних колес | Независимая, амортизационные стойки, треугольные поперечные рычаги, стабилизатор поперечной устойчивости |
| Задних колес | Полузависимая, продольные взаимосвязанные рычаги, винтовые пружины, телескопические амортизаторы |
| Размер шин | 165/70 SR13 |
| Размер дисков | 4.5Jx13 |
| Тормоза | |
| Передние | Дисковые |
| Задние | Барабанные |
| Расход топлива | |
| Городской цикл, л/100 км | 8,6 |
| Топливо | Бензин А-92 |
| Емкость топливного бака, л | 43 |
1. Трансмиссия автомобиля
1.1 Сцепление
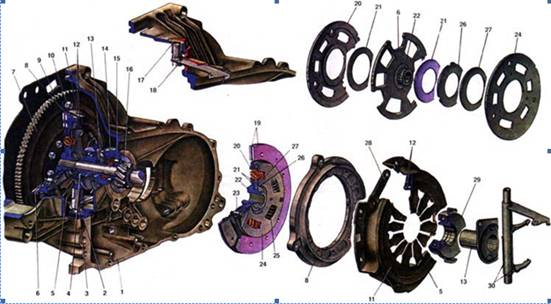
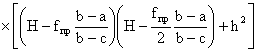
Устройство сцепления автомобиля ВАЗ-2108
1. Картер сцепления; 2. Опорная втулка вала вилки выключения сцепления; 3. Вилка выключения сцепления; 4. Подшипник выключения сцепления; 5. Нажимная пружина; 6. Ведомый диск; 7. Маховик; 8. Нажимной диск; 9. Шкала для проверки момента зажигания; 10. Болт крепления сцепления к маховику; 11. Кожух сцепления; 12. Опорные кольца нажимной пружины; 13. Направляющая втулка муфты подшипника выключения сцепления; 14. Сальник первичного вала коробки передач; 15. Подшипник первичного вала; 16. Первичный вал; 17. Втулка вала вилки выключения сцепления; 18. Защитный чехол вилки выключения сцепления; 19. Фрикционные накладки ведомого диска; 20. Передняя пластина демпфера; 21. Фрикционные кольца демпфера; 22. Ступица ведомого диска; 23. Упор демпфера; 24. Задняя пластина демпфера; 25. Пружина демпфера; 26. Опорное кольцо пружинной шайбы; 27. Пружинная шайба демпфера; 28. Пластина, соединяющая кожух сцепления с нажимным диском; 29. Муфта подшипника выключения сцепления; 30. Соединительная пружина вилки и муфты подшипника выключения сцепления.
Анализ конструкции в соответствии с требованиями
Надежная передача крутящего момента от двигателя к трансмиссии
Максимальное значение передаваемого сцеплением момента определяется уравнением
MCmax = MKmax β.
Обычно принимают коэффициент запаса β = 1,2...2,5 в зависимости от типа сцепления и его назначения. Сцепления с диафрагменными пружинами имеют наиболее низкое значение коэффициента запаса. Большие значения β принимают для сцеплений грузовых автомобилей и автобусов.
Момент Мс, передаваемый сцеплением, создается в результате взаимодействия поверхностей трения ведомого диска с контртелом (маховиком, нажимным диском). Рассмотрим процесс этого взаимодействия, используя рис. 2
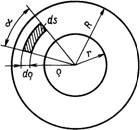
Рисунок 2. Схема к определению расчетного момента сцепления
Выделив на поверхности ведомого диска элементарную площадку ds, найдем элементарную силу трения
dT = po μ ds = po μ p dp dα
и элементарный момент
dM = p0 μ p2 dp dα,
где  - давление, характеризуемое отношением усилия Рпр пружин к
площади ведомого диска; μ — коэффициент трения.
- давление, характеризуемое отношением усилия Рпр пружин к
площади ведомого диска; μ — коэффициент трения.
Момент, передаваемый одной парой поверхностей трения,
 .
.
Подставив значение р0 в это уравнение, получим
М'с = Рпр µ Rср,
где ![]() — радиус приложения результирующей сил трения или средний
радиус ведомого диска, который с достаточной степенью приближения может быть
принят Rср = 0,5 (R + r). Момент, передаваемый сцеплением, у которого i пар трения,
— радиус приложения результирующей сил трения или средний
радиус ведомого диска, который с достаточной степенью приближения может быть
принят Rср = 0,5 (R + r). Момент, передаваемый сцеплением, у которого i пар трения,
MC = MKmax β = Pnp μ Rср i.
Предохранение трансмиссии от динамических нагрузок. Динамические нагрузки в трансмиссии могут быть единичными (пиковыми) и периодическими.
Пиковые нагрузки возникают в следующих случаях: при резком изменении скорости движения (например, при резком торможении с невыключенным сцеплением); при резком включении сцепления; при наезде на неровность.
Наибольшие пиковые нагрузки элементы трансмиссии испытывают при резком включении сцепления. В этом случае трансмиссия закручивается не только крутящим моментом двигателя МК, но в большей степени моментом касательных сил инерции МИ вращающихся частей двигателя
МС=МК + МИ.
При условии, что момент касательных сил инерции полностью используется на закручивание валов,
МИ = сβ αТР,
где сβ — крутильная жесткость трансмиссии; αТР — угол закручивания валов трансмиссии.
Элементарная работа по закручиванию валов трансмиссии dL = сβ αТР dαТР или после интегрирования
L = сβ ![]() /2.
/2.
С учетом принятого выше допущения в момент резкого включения сцепления
Je ![]() /2 = сβ
/2 = сβ ![]() /2
/2
Подставив αТР = МИ / (сβ), получим
![]() .
.
Таким образом, инерционный момент зависит от угловой скорости коленчатого вала в момент резкого включения сцепления и от крутильной жесткости трансмиссии.
Периодические нагрузки возникают в результате неравномерности крутящегомомента двигателя. Они являются источником шума в зубчатых передачах, повышенного напряжения в элементах трансмиссии, а часто — причиной поломок деталей от усталости, особенно при резонансе.
Для гашения крутильных колебаний трансмиссии в сцеплении устанавливают гаситель крутильных колебаний.
Работа трения гасителя определяется усилием Рr, сжимающим его фрикционные кольца, коэффициентом трения ц, средним радиусом rср фрикционных колец, относительным углом φ перемещения элементов (углом буксования), числом пар трения i гасителя крутильных колебаний:
Lтp.г = Рг μ rcp φi = Мтр.г i.
Момент трения Мтр.г = (0,15...0,20)Мкmах. По мере износа фрикционных колец Мтр.г снижается, что может привести к полному прекращению выполнения этим механизмом функций гасителя.
Привод сцепления.
Для гидравлического привода
![]() ;
; ![]() ;
; ![]()
Ход педали зависит от величины s, на которую отводится нажимной диск при выключении сцепления, и зазора Δ2 между рычагами выключения и выжимным подшипником
Sпед = suп.с + Δ2u1.
Нагрузки в сцеплении
Диафрагменная нажимная пружина. Расчетная схема для определения параметров диафрагменной пружины приведена на рис.3.
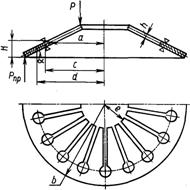
Рис. 3. Расчетная схема диафрагменной пружины
Усилие пружины:
![]()
где E' = E / (1 — μ2) (Е— модуль упругости первого рода; μ — коэффициент Пуассона, μ = 0,25); Н — высота пружины; h — толщина пружины.
Усилие выключения может быть подсчитано из условия равновесия
Рвык
(с — е) = Рпр (b — с); ![]() .
.
Ход подшипника муфты выключения определяется суммой перемещений сечения пружины (принимается недеформируемым в осевом направлении) и лепестков при их деформации:
fпр = f1 + f2; f1 = (c — e) Δα; f2 = Pвык / сл,
где Δα — угловое перемещение; сл — жесткость лепестков.
Наибольшие напряжения испытывает элемент пружины со стороны малого торца при повороте пружины на угол α, т. е. когда пружина становится плоской. Здесь суммируются напряжения растяжения σр и напряжения изгиба σи лепестков:
σр
+ σи = σmax; ![]() .
.
В свободном состоянии α ≈10...12°.
Лепестки диафрагменной пружины испытывают наибольшее изгибающее напряжение у основания:
![]() ,
,
где nл — число лепестков; ωи — момент сопротивления изгибу в опасном сечении.
Фрикционные диски. Основным расчетным параметром является давление
![]() .
.
В выполненных конструкциях р0= 0,15...0,25 МПа.
Пружины гасителя крутильных колебаний
Максимальное усилие, сжимающее одну пружину гасителя:
![]() ,
,
где rпр.г — радиус приложения усилия к пружине; zпр.г — число пружин гасителя. Принимая во внимание большую жесткость пружин гасителя, напряжение пружины следует вычислять с учетом кривизны витка:
![]() ,
,
где kк.в — коэффициент, учитывающий кривизну витка пружины:
![]() ;
; ![]() .
.
Для пружинной стали допускаемое напряжение [τ] =700...900 МПа.
Рычаги выключения сцепления. Изгибающий момент от действия силы, приложенной на концах рычагов, вызывает напряжение изгиба
![]() ,
,
где Р'пр— усилие пружин сцепления при выключении; l — расстояние до опасного сечения; uр— передаточное число рычага; nр— число рычагов; ωи — момент сопротивления изгибу.
Допускаемое напряжение [σи]=300 МПа. Материал рычагов — сталь 10, сталь 15. Иногда материалом рычагов служит ковкий чугун. В этом случае допускаемое напряжение примерно вдвое ниже, чем для стали.
Ступица ведомого диска. Шлицы испытывают смятие и изгиб. Напряжение смятия
![]() ,
,
где Pш = Mкmaxβ / rср; rср = (dн + dв)/4; F = 0,5(dн — dв) lшiш,
lш — длина шлицев; iш —число шлицев; α = 0,75 — коэффициент точности прилегания шлиц; dн и dв — соответственно наружный и внутренний диаметр шлицев.
Напряжение среза
![]() ,
,
где bш — ширина шлица.
Материал ступицы — легированная сталь типа 40Х, допускаемое напряжение смятия [σc] = 15...30 МПа, допускаемое напряжение [τ] =5...15 МПа.
Работа буксования сцепления. Для расчета работы буксования используют формулы, базирующиеся на статической обработке экспериментальных данных. Приведем варианты этих формул.
1) ![]() ,
,
где Мψ — момент сопротивления движению при трогании, приведенный к ведущему валу коробки передач, Jа — момент инерции автомобиля (автопоезда), приведенный к ведущему валу коробки передач; ωe = 0,75ωN — для дизелей; ωe = ωD/3 + 50 π — для карбюраторных двигателей; b = 0,72 — для дизелей, b = 1,23 — для карбюраторных двигателей. Расчет производится для легковых автомобилей и автопоездов на первой передаче; для грузовых одиночных автомобилей на второй передаче.
2) ![]() .
.
Удельная работа буксования сцепления
Lб0 = Lб / Fн.с,
где Fн.с — суммарная площадь накладок сцепления.
Удельная работа буксования при указанных выше условиях трогания автомобиля с места для легковых автомобилей [Lб0] = 50...70 Дж/см2; для грузовых автомобилей [Lб0] = 15...120 Дж/см2; для автопоездов [Lб0] = 10...40 Дж/см2.
Нагрев деталей сцепления. Чрезмерный нагрев деталей сцепления при буксовании может вывести его из строя.
Нагрев деталей за одно включение при трогании с места
ΔT = γ Lб / (mдет сдет),
где γ — коэффициент перераспределения теплоты между деталями (γ = 0,5 — для нажимного диска однодискового сцепления и среднего диска двухдискового сцепления; γ = 0,25 — для наружного диска двухдискового сцепления); сдет—теплоемкость детали; mдет— масса детали.
Допустимый нагрев нажимного диска за одно включение
[ΔT] =10...15°С.
1.2 Коробка передач
Устройство коробки передач автомобиля ВАЗ-2108
1. Задняя крышка; 2. Ведущая шестерня V передачи; 3. Картер коробки передач; 4. Ведущая шестерня IV передачи; 5. Шарик фиксатора; 6. Пружина фиксатора; 7. Сухарь фиксатора; 8. Ведущая шестерня III передачи; 9. Ведущая шестерня II передачи; 10. Ведущая шестерня заднего хода; 11. Ведущая шестерня I передачи; 12. Картер сцепления; 13. Первичный вал коробки передач; 14. Ведущая шестерня главной передачи; 15. Вторичный вал; 16. Ось сателлитов; 17. Сателлит; 18. Полуосевая шестерня; 19. Сальник полуоси; 20. Шестерня привода спидометра; 21. Коробка дифференциала; 22. Ведомая шестерня главной передачи; 23. Шток выбора передач; 24. Рычаг штока выбора передач; 25. Трехплечий рычаг выбора передач; 26. Фиксатор вилки заднего хода; 27. Вилка заднего хода; 28. Выключатель фонаря заднего хода; 29. Промежуточная шестерня заднего хода; 30. Ось промежуточной шестерни заднего хода; 31. Регулировочное кольцо; 32. Ведомая шестерня I передачи; 33. Скользящая муфта включения 1, II передач и заднего хода; 34. Ведомая шестерня II передачи; 35. Ведомая шестерня III передачи: 36. Блокирующее кольцо синхронизатора III и IV передач; 37. Ступица муфты синхронизатора III и IV передач; 38. Скользящая муфта синхронизатора III и IV передач; 39. Ведомая шестерня IV передачи; 40. Ведомая шестерня V передачи; 41. Скользящая муфта синхронизатора V передачи; 42. А выступ блокирующего кольца; а, в, с зазоры; 43. I.Схема работы синхронизатора; 44. II.Нейтральное положение; 45. III.Начало включения; 46. IV.передачи; 47. IV.Завершение выравнивания угловых скоростей шестерни 39 и вала 15; 48. V.Полное включение IV передачи.
Анализ конструкции в соответствии с требованиями
Для анализа и оценки конструкций коробок передач служит ряд оценочных параметров, которые определяются требованиями, предъявляемыми к коробкам передач различного типа.
Диапазон передаточных чисел. Одним из важных оценочных параметров коробки передач является отношение передаточного числа низшей и высшей! передач
Д = uКПmах/ uКПmin.
Это отношение называется диапазоном передаточных чисел или диапазоном коробки передач.
В легковых автомобилях и автобусах малой вместимости на их базе Д = 3…4; в грузовых автомобилях в зависимости от грузоподъемности и назначения Д = 5…8. Такой же диапазон имеют автобусы средней и большой вместимости с механической коробкой передач; автомобили-тягачи и автомобили высокой проходимости имеют Д = 9…13. В этих пределах находится диапазон передаточных чисел коробки передач для автомобилей технологического назначения, у которых должна быть предусмотрена скорость порядка 2...3 км/ч. Устойчивое движение с такой скоростью может быть обеспечено только при большом значении передаточного числа низшей передачи. Следует иметь в виду, что такая скорость может быть получена также, если применяется раздаточная коробка с понижающей передачей.
Синхронизаторы
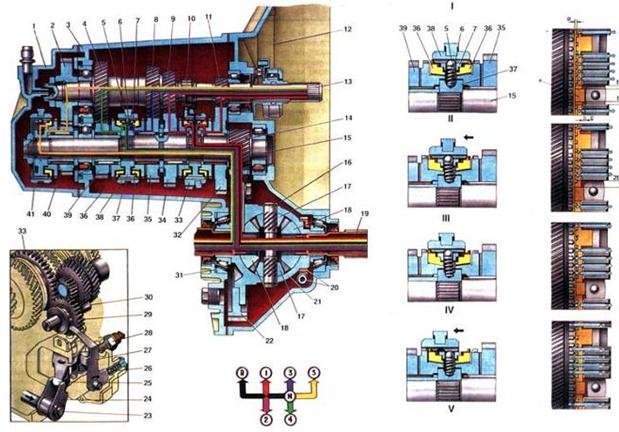
Рисунок 5. Схема динамической системы синхронизатора
Проанализируем рабочий процесс инерционного синхронизатора, рассмотрев последовательно выравнивание угловых скоростей синхронизирующих деталей, блокировку включения передачи до полной синхронизации, включение передачи.
Выравнивание угловых скоростей можно проиллюстрировать динамической системой, принятой для анализа работы инерционного синхронизатора. К подсистеме, имеющей суммарный приведенный момент инерции Jп, относятся детали, связанные с включаемым зубчатым колесом при выключенном сцеплении и нейтральном положении коробки передач: ведомый диск сцепления с ведущим валом и шестерней; промежуточный вал со всеми зубчатыми колесами, закрепленными на нем; зубчатые колеса, свободно устанавливаемые на ведомом валу и находящиеся в постоянном зацеплении с зубчатыми колесами промежуточного вала, а в ряде конструкций и зубчатые колеса заднего хода. Суммарный приведенный момент инерции Jа имеет подсистема, включающая детали, связанные с ведомым (вторичным) валом коробки передач.
Для выравнивания угловых скоростей соединяемых элементов необходимо на поверхностях конусов создать момент трения Мтр. Уравнение динамики Jпdω/dt = Мтр подсистемы с моментом инерции Jп можно проинтегрировать:
 .
.
Считая момент трения Мтр постоянным в течение процесса синхронизации, получим
Мтр =Jп (ω1 — ω2) / t. (1)
Здесь ω2 = ωe/uКПi — угловая скорость ведомого вала до переключения (принято, что за время переключения передачи ω2=const); ω1 = ωe/uКПi+1 — угловая скорость включаемого зубчатого колеса более высокой передачи; t — время выравнивания угловых скоростей (время синхронизации). После подстановки в уравнение (1) значений ω1 и ω2получим
 . (2)
. (2)
Рассмотрим силовое взаимодействие элементов синхронизатора автомобиля ВАЗ 2108.
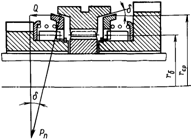
Рисунок 6. Схема инерционного синхронизатора
Момент трения, создаваемый на конусных поверхностях, может быть выражен через нормальную силу Рп на конусах синхронизации:
Мтр = Рп μ rср, (3)
где Рп — нормальная сила на поверхности трения; μ — коэффициент трения; rср — средний радиус конуса.
В свою очередь, нормальная сила может быть выражена через усилие Q, создаваемое водителем при включении передачи,
Рп = Q / sinδ. (4)
Приравняв правые части уравнений (2) и (3), используя зависимость (4), найдем связь между усилием, создаваемым на муфте синхронизатора, и параметрами, характеризующими синхронизатор:
 . (5)
. (5)
В частности, из этого выражения видно, что усилие Q связано с временем синхронизации обратной зависимостью: чем больше усилие Q, тем меньше время синхронизации; усилие Q тем меньше, чем больше плотность ряда коробки передач.
Работа, затрачиваемая на выравнивание угловых скоростей, т. е. работа трения, затрачиваемая на поглощение кинетической энергии вращающихся деталей:
 .
.
Из этого уравнения следует, что работа трения (работа буксования) синхронизатора пропорциональна квадрату разности угловых скоростей соседних передач и не зависит от времени. Для уменьшения работы буксования синхронизатора необходимо увеличивать число передач в коробке, чтобы сблизить передаточные числа соседних передач; при этом также улучшаются тягово-экономические свойства автомобиля. Однако при увеличении числа передач возрастает момент инерции вращающихся деталей и, следовательно, работа буксования синхронизатора, а также усложняется управление коробкой передач. В выполненных конструкциях коробок передач рациональное согласование влияния рассмотренных противоречивых факторов нашло отражение в том, что шаг ряда передаточных чисел выбирают в пределах 1,1... 1,5.
Принято оценивать синхронизатор по удельной работе трения (буксования)
L'C = LC/FC,
где Fc — площадь конуса синхронизатора. По расчетным данным, удельная работа трения (в МДж/см2) синхронизатора автомобилей находится в следующих пределах.
Работа трения синхронизатора сопровождается выделением теплоты. За одно включение температура синхронизатора повышается
ΔT = γcLc/(mcc),
где γc — коэффициент перераспределения теплоты между деталями (для синхронизаторов γc = 0,5); тс — масса синхронизатора; с — коэффициент теплоемкости
За одно выключение синхронизатор может нагреваться на 15...30°С.
Блокировка осуществляется блокирующими устройствами синхронизаторов, препятствующими включению передачи до полного выравнивания угловых скоростей соединяемых элементов.

Рисунок 7. Схемы блокирующих устройств синхронизаторов:
а — с блокирующими зубьями; б — с блокирующими вырезами в цилиндрах; в — с блокирующими пальцами
Окружная сила, прижимающая блокирующие элементы,
Pб = Мтр / rб,
где r6 — радиус расположения блокирующих элементов
Эта сила вызывает реакцию на блокирующих поверхностях
Px = Мтр / (r6 tgβ).
Для того чтобы передача не могла быть включена до полного выравнивания угловых скоростей, сила Q, приложенная к муфте синхронизатора, должна быть меньше Рх:
Q < Px.
С увеличением силы Q растет момент Мтр, а следовательно, увеличивается сила Рх (силы трения на блокирующих поверхностях не учитываются).
Выразив силу Q через параметры синхронизатора, характеризуемые уравнением (5), получим
tgβ = μ rср / (sinδ r6).
Следует особо подчеркнуть, что резкое увеличение усилия Q (при правильно выбранных параметрах синхронизатора) не может привести к преждевременному включению передачи до полной синхронизации и обычно приводит или к ускоренному изнашиванию блокирующих деталей, или к их поломкам.
Если учесть трение на блокирующих поверхностях, то осевая реакция увеличится на величину
P'x = P'п μ'sinβ,
где μ'— коэффициент трения блокирующих поверхностей; Р'п — нормальная сила давления на блокирующих поверхностях. Чтобы не произошло преждевременного включения передачи, достаточно обеспечить неравенство Q < Px — Р'х, которое после преобразований можно записать в следующем виде:
 .
.
В этом случае угол β несколько больше, чем рассчитанный без учета трения на блокирующих поверхностях.
Параметры синхронизаторов выбирают в следующих пределах: μ = 0,06...0,1; δ = 6...12°; β = 25...40°. В качестве материала для конусных колец используют бронзу. На трущиеся поверхности колец наносят канавки для разрушения масляной пленки и увеличения коэффициента трения.
Нагрузки в коробке передач.

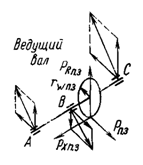
Рисунок 8. Схема сил, действующих в двухвальной коробке передач
На рисунке 8 представлена простейшая схема двухвальной коробки передач при включении одной передачи и схемы сил, действующих на зубчатые колеса и валы. На зубья пары постоянного зацепления привода промежуточного вала действуют следующие силы:
- окружная: Pп.з = Mкmax/r ωп.з;
- осевая (при косозубых колесах): Pхп.з = Pп.з tgβ;
- радиальная: PRп.з = Pп.з tga αω / cosβ;
- нормальная: Pnп.з = Pп.з /(cos αω cosβ).
Здесь αω — угол профиля зуба; (β — угол наклона зубьев; r ωп.з — радиус делительной окружности шестерни ведущего вала. На зубья пары при включении j'-й передачи действуют силы:
- окружная Pi = Mкmax ui / rωi;
- осевая Pхi = P1 tgβ;
- радиальная PRi = Pi tga αω / cosβ;
- нормальная Pni = Pi /(cos αω cosβ).
Здесь ui — передаточное число включенной передачи; rωi — радиус делительной окружности зубчатого колеса ведомого
При вычислении сил, действующих на зубья дополнительной коробки (мультипликатор или демультипликатор), следует учитывать передаточные числа этих коробок.
Зубчатые колеса. Зубчатые зацепления характеризуют следующие основные соотношения: прямозубое mn = dw/z, косозубое ms=dwcosβ/z; cos β = mn / m5, где mn — нормальный модуль, мм; ms—торцовый модуль, мм; dw — диаметр делительной окружности колеса; z — число зубьев.
Ширина зубчатого колеса зависит от передаваемого момента и от расстояния между осями валов. Приближенно ширина зубчатого колеса может быть определена по формуле:
b = (5...8) mn.
При применении зубчатых колес большой ширины повышаются требования к жесткости валов. При недостаточной жесткости валов изгиб последних вызывает концентрацию напряжений на краях зубьев.
Расстояние между осями валов коробки передач
А0 = mn (z1 + z2)/(2cosβ), где z1 + z2 — сумма чисел зубьев пары, находящейся в зацеплении.
Это расстояние связано с передаваемым крутящим моментом следующей зависимостью:
![]() ,
,
где а=14,5...16 для легковых автомобилей и а=17,0...21,5 для грузовых автомобилей. В автомобильных коробках передач, как правило, применяются колеса с корригированными зубьями, что позволяет увеличить прочность зуба. Угол профиля зуба обычно αω = 20°. Нормальный модуль тп выбирают из гостированного размерного ряда; его значение зависит от передаваемого крутящего момента.
Мкmах, Н∙м . . 100...200 201...400
mn, мм . . . 2,25...2,5 2,6...3,75
Мкmах, Н∙м . . 401...600 601...800 800...1000
mn, мм . . . 3,76...4,25 4,26...4,5 4,6...6
Во многих коробках передач нормальный модуль зубчатых колес не одинаков на всех передачах; на низших передачах нормальный модуль имеет более высокое значение.
Угол наклона зубьев β = 25...40° для легковых автомобилей и β = 20...25° для грузовых автомобилей.
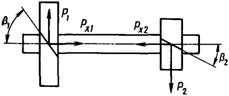
Рисунок 9. Схема сил, действующих на зубчатые колеса промежуточного вала коробки передач
Исходя из равенства осевых сил,
Рх1 = Рх2; Рх1 = P1tgβ1; Рх2 = P2tgβ2;
Рх1 = Мкmaxuп.з / rω1; Рх2 = Мкmaxuп.з / rω2.
где uп.з — передаточное число пары постоянного зацепления; rω1 и rω2 — радиусы делительных окружностей колес промежуточного вала.
Из равенства осевых сил находим
tgβ1 / tgβ2 = rω1 / rω2.
Если модули обоих зубчатых колес одинаковы, то
tgβ1 / tgβ2 = z1 / z2.
Полностью уравновесить осевые силы удается практически не всегда, так как угол наклона зубьев зависит от нормального модуля и расстояния между осями валов. В этом случае подшипники должны быть рассчитаны на восприятие неуравновешенной осевой силы.
На прочность зубчатые передачи рассчитывают в соответствии с ГОСТ 21354—87.
Материалом зубчатых колес служат легированные стали:
- цементуемые — 12ХН3А, 20ХН3А, 18ХГТ, 30ХГТ, 20ХГР и др. (глубина цементуемого слоя 0,8...1,5 мм);
- цианируемые — 35Х, 40Х, 40ХА и др. (глубина цианируемого слоя 0,2...0,4 мм);
- закаливаемые ТВЧ — 45, 55П.
Твердость поверхности зуба 57...64 HRCэ, сердцевины 30...46 HRCэ. Для этих материалов допускаемое напряжение изгиба σFP = 700...800 МПа; допускаемое контактное напряжение σHP = 1000...1200.
Валы. Валы коробок передач воспринимают скручивающие и изгибающие нагрузки. Кроме того, они должны быть достаточно жесткими, чтобы их прогиб не вызывал перекоса зубчатых колес, находящихся в зацеплении. Последовательность определения напряжений в валах: в трехвальных коробках передач — ведомый, промежуточный вал, ведущий вал; в двухвальных коробках передач расчет можно начинать с любого из валов. Пользуясь схемой, определяют силы, действующие на зубчатые колеса на всех передачах, по формулам, приведенным выше. Затем для каждой передачи находят реакции в опорах. После этого строят эпюры моментов и определяют наибольший изгибающий и крутящий моменты.
Результирующее напряжение
![]() ,
,
где dв.o — диаметр вала в опасном сечении.
Шлицованный вал рассчитывают по внутреннему диаметру.
Жесткость валов определяется по их прогибу. Силы Pхl и PRl дают прогиб fв валов в плоскости, в которой лежат оси валов, сила Р1 дает прогиб в перпендикулярной плоскости. Прогиб вала в каждой плоскости должен лежать в пределах 0,05...0,1 мм. Полный прогиб
![]() , fп
≤0,2 мм.
, fп
≤0,2 мм.
Валы должны обладать достаточной жесткостью, поэтому напряжения в них невысокие (200...400 МПа).
Шлицы валов проверяют на смятие [τсм]=200 МПа.
Для изготовления валов применяют обычно те же материалы, что и для зубчатых колес.
Долговечность подшипников. Критерием оценки эксплуатационных свойств подшипников является базовая долговечность, соответствующая 90 %-ной надежности.
Для определения долговечности подшипника необходимо иметь следующие данные: радиальные и осевые силы, действующие на подшипник на каждой передаче; ресурс коробки передач до капитального ремонта (в километрах пробега автомобиля или часах); среднюю техническую скорость движения; распределение пробега на передачах.
Однако при расчете подшипника на долговечность в этих формулах вместо максимального значения крутящего момента двигателя Мкmах следует принимать расчетную величину крутящего момента аМктах (где а — коэффициент использования крутящего момента). Этот коэффициент зависит от отношения мощности двигателя к весу автомобиля и может быть определен по эмпирической формуле:
а = 0,96 — 0,136 ∙ 10-2 + 0,41 ∙ 10-6 N2уд,
где Nуд — удельная мощность, Вт/Н.
Базовая долговечность подшипника определяется в соответствии с ГОСТ 18865—82 по ресурсу (в млн. оборотов)
L10 = (C/P)n
где С — динамическая грузоподъемность подшипника (определяют по каталогу); Р — эквивалентная динамическая нагрузка; р — показатель степени (шариковые подшипники — р = 3, роликовые — р = 3,33).
Эквивалентная динамическая нагрузка на подшипник определяется для условий работы на каждой передаче:
радиальные Pr = (XVFr+YFa)KбKt
радиально-упорные, Pa = (XFr+YFa)KбKt
где Fr, Fa — соответственно радиальная и осевая нагрузки; X, Y — коэффициенты радиальной и осевой нагрузок (по каталогу); V — коэффициент вращения (при вращении внутреннего кольца V = l, при вращении наружного кольца V = l,2); Kб — коэффициент безопасности (для коробок передач Kб = 1); Kt — температурный коэффициент Kt = 1,10 при 150 °С). Следует иметь в виду, что коэффициенты X и Y различны в зависимости от типа подшипника и соотношения осевой и радиальной нагрузок.
Для вычисления эквивалентной динамической нагрузки на подшипник коробки передач необходимо вначале определить долю работы подшипника на каждой передаче, учитывая нагрузку и соответствующее число оборотов за время работы на данной передаче. Суммируя по всем передачам, можно вычислить эквивалентную динамическую нагрузку по формуле:
![]()
 ,
,
где PI, РII, РIII, ... , Рn — эквивалентные нагрузки на подшипник на каждой передаче при долговечности соответственно
LI; LII, LIII ..., Ln; ![]() ,
,
Li = Si / (2πrк uтр ∙ 106),
где Si — пробег автомобиля на каждой передаче; uтр — передаточное число части трансмиссии от вала, на котором установлен подшипник, до вала ведущего колеса автомобиля).
Динамическая грузоподъемность подшипника
![]() .
.
1.3 Главная передача
Применяемая при поперечном расположении двигателя в переднеприводных автомобилях, цилиндрическая главная передача размещается в общем картере с коробкой передач и сцеплением. Шестерня главной передачи закрепляется на ведомом валу коробки передач, а иногда выполняется за одно целое с этим валом и устанавливается консольно. При консольной установке шестерни главная передача и дифференциал могут быть несколько сдвинуты в сторону двигателя, тем самым уменьшается разница длины полуосей. С той же целью колесо закрепляется на картере дифференциала, обычно с левой по ходу автомобиля стороны.
В существующих конструкциях зубья цилиндрической передачи выполняются прямыми («Форд Фиеста»), косыми (ВАЗ-2108, «Фиат Уно»), шевронными (Хонда).
Передаточное число цилиндрической пары обычно принимают 3,5...4,2. Так как число зубьев шестерни для обеспечения плавности зацепления должно быть не менее десяти, то при большем передаточном числе размеры зубчатого колеса увеличиваются, в результате чего снижается дорожный просвет и повышается уровень шума при работе главной передачи. КПД цилиндрической пары — не менее 0,98.
1.4 Дифференциалы трансмиссии автомобиля
Анализ и оценка конструкции дифференциала автомобиля
На автомобиле ВАЗ-2108 применяется симметричный конический сателитный дифференциал. Симметричные конические дифференциалы наиболее распространенные (их часто называют простыми). Применяются они как на легковых, так и грузовых автомобилях, в качестве межколесных, а иногда и межосевых дифференциалов.
Для обеспечения смазки сателлитов оси в месте посадки сателлитов должны иметь лыски или спиральные канавки, удерживающие масло. Сателлиты и полуосевые шестерни выполняются прямозубыми. Число зубьев сателлитов и полуосевых шестерен может быть четным и нечетным, но для обеспечения сборки должно подчиняться условию 2zш / n = k,
где zш — число зубьев полуосевой шестерни; п — число сателлитов, k — целое число.
К преимуществам простого конического дифференциала следует отнести:
- обеспечение устойчивости при движении по скользкой дороге и торможении двигателем благодаря равенству тангенциальных реакций на ведущих колесах;
- простоту устройства, малые размеры и массу, надежность, высокий КПД.
Отрицательным качеством является ограничение проходимости.
Нагрузки в дифференциале
В коническом дифференциале определяют нагрузки на зубья сателлитов, полуосевых шестерен, крестовину и нагрузки со стороны сателлитов на корпус дифференциала.
Нагрузку на зубья сателлита и полуосевых шестерен оределяют из условия, что окружная сила распределена поровну между всеми сателлитами и каждый сателлит передает усилие двумя зубьями. Окружная сила, действующая на один сателлит,
Рс = Мкmах uкп1uгп/(r1 nс),
где r1 — радиус приложения; nс — число сателлитов (рис. 10).
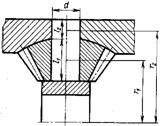
Рисунок 10. Схема сателлита
Напряжение изгиба определяется по ГОСТ 21354—87. Износ зубьев не учитывается.
Материал сателлитов и полуосевых шестерен: сталь 18ХГТ, 25ХГМ, 20ХН2М; [σи] =500...800 MПa.
Шип крестовины (18ХГТ, 20ХНЗА и др.) под сателлитом испытывает:
- напряжение смятия
σсм = Pc/(dl1), [ σсм] =50...60 МПа;
- напряжение среза
τср = 4Рс/(πd2), [τср] =100...120 МПа;
- напряжение смятия в месте крепления в корпусе дифференциала под действием окружной силы Рд = Мкmах uкп1uгп/(r2 nс):
σсм = Pд/(dl2), [σсм] =50...60 МПа.
Давление торца сателлита на корпус дифференциала определяется напряжением смятия:
σсм = Pxc / F, [σсм]=10...20 МПа,
где Pxc = Рс tgαω sinδc (αω — угол зацепления; δc — половина угла конуса сателлита).
1.5 Силовые приводы, валы и полуоси трансмиссии автомобиля
Карданные передачи применяются в трансмиссиях автомобилей для силовой связи механизмов, валы которых не соосны или расположены под углом, причем взаимное положение их может меняться в процессе движения. Карданные передачи могут иметь один или несколько карданных шарниров, соединенных карданными валами, и промежуточные опоры. Карданные передачи применяют также для привода вспомогательных механизмов, например, лебедки. В ряде случаев связь рулевого колеса с рулевым механизмом осуществляется при помощи карданной передачи.
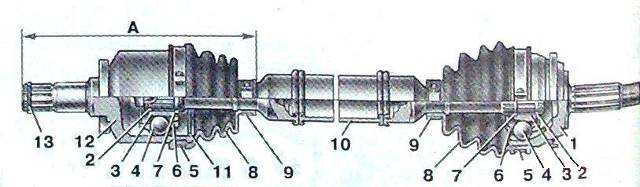
Привод пдреднего колеса:
1 - корпус наружного шарнира; 2 - стопорное кольцо; 3 - обойма; 4 - шарик; 5 - наружный хомут; 6 - сепаратор; 7 - упорное кольцо; 8 - защитный чехол; 9 - внутренний хомут; 10 - вaл привода колеса; 11 - фиксатор внутреннего шарнира; 12- корпус внутреннего шарнира; 13 - стопорное кольцо корпуса внутреннего шарнира; А - контрольный размер
Методика расчёта привода трансмиссии автомобиля
Упругий полукарданный шарнир должен центрироваться, иначе балансировка карданного вала может нарушиться.
В основе всех конструкций карданных шарниров равных угловых скоростей лежит единый принцип: точки контакта, через которые передаются окружные силы, находятся в биссекторной плоскости валов.
Для пояснения этого рассмотрим простейшую модель, приведенную на рисунке 12.
Окружная скорость точки контакта О υO = ω1r1; υO = ω2r2, откуда ω1r1 = ω2r2. Подставив в это равенство значения r1 = AOsinα и r2 = BOsinβ получим ω1AOsinα = ω2BOsinβ. Угловые скорости ведущего и ведомого валов равны, если АО = ВО; α = β.
Легко показать, что в этом случае точка О лежит в биссекторной плоскости. Это видно из равенства треугольников ОО'С и OO'D.
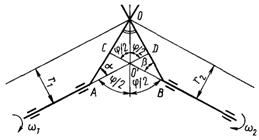
Рисунок 12. Схема карданного шарнира равных угловых скоростей
Расчет размеров деталей карданной передачи
Карданный вал. Во время работы карданный вал испытывает изгибающие, скручивающие и осевые нагрузки.
Изгибающие нагрузки возникают в результате неуравновешенности карданного вала, и в некоторой степени пары осевых сил, нагружающих шипы крестовины карданного шарнира. В эксплуатации неуравновешенность может появиться не только в результате механических повреждений карданного вала, но также при износе шлицевого соединения или подшипников карданных шарниров. Неуравновешенность приводит к вибрациям в карданной передаче и возникновению шума. Карданный вал подвергается тщательной динамической балансировке на специальных балансировочных станках. Допустимый дисбаланс зависит от максимального значения эксплуатационной угловой скорости карданного вала и находится в пределах (15... 100) г∙см.
Даже хорошо уравновешенный вал в результате естественного прогиба, вызванного собственным весом, при некоторой угловой скорости, называемой критической, теряет устойчивость; его прогиб возрастает настолько, что возможно разрушение вала.
Пусть в статическом положении ось вала смещена на расстояние е от оси вращения, а при угловой скорости ω получает прогиб f . Тогда при вращении карданного вала возникает центробежная сила
Pu = mв (e + f) ω 2,
где mв — масса вала.

Рисунок 13. Схема для определения критической скорости карданного вала
Центробежная сила уравновешивается силой упругости вала
Ру = си f,
где си — изгибная жесткость.
Поэтому
![]() или
или ![]()
Если си → mвω2, то f → ∞.
Критическая угловая скорость, вызывающая бесконечно большой прогиб,
![]() ,
,
соответственно критическая частота вращения вала
nкр = 30 ωкр / π
nкр = 30шкр/я,
где си = qвlв / f (qв — вес вала, отнесенный к его длине; lв — длина вала).
Прогиб вала определяется в зависимости от принятой схемы его нагружения. Будем считать карданный вал нагруженной равномерно балкой на двух опорах со свободными концами. Прогиб балки
f = 5qвlв4 / (384EJи),
где E = 2∙105 МПа —
модуль упругости первого рода; ![]() —
момент инерции поперечного сечения вала (dн и dвн
— соответственно
наружный и внутренний диаметры вала).
—
момент инерции поперечного сечения вала (dн и dвн
— соответственно
наружный и внутренний диаметры вала).
Масса вала определяется из выражения
![]() ,
,
где γ — плотность материала вала.
Подставив значения си и тв, получим выражение для критической частоты вращения вала:
полого ![]()
сплошного
![]()
Если считать карданный вал балкой с защемленными опорами, то числовой коэффициент в формуле следует принимать большим в 1,5...2,25 раза.
Критическая частота вращения карданного вала должна быть в 1,5...2 раза больше максимальной эксплуатационной. Для повышения критической частоты вращения следует уменьшать длину вала, что особенно эффективно, и увеличивать как наружный, так и внутренний диаметры. Внутренний диаметр трубчатого вала можно увеличивать до определенного предела (лимитирует прочность вала).
Скручивающие нагрузки:
Трубчатый вал изготовляют из малоуглеродистой стали (сталь 15, сталь 20), не подвергая ее закалке. Толщина стенок обычно не превышает 3,5 мм (для автомобилей ВАЗ — 2 мм; КамАЗ —3,5 мм).
Напряжение кручения трубчатого вала
![]() ; [τкр] = 100...120МПа.
; [τкр] = 100...120МПа.
Приваренные к трубе шлицованный наконечник и вилку изготовляют из легированной или углеродистой конструкционной стали 30, 35Х или 40.
Напряжение кручения сплошного вала
![]() ; [τкр] = 300...400 МПа.
; [τкр] = 300...400 МПа.
При передаче крутящего момента карданный вал закручивается на некоторый угол
![]()
где J0 — момент инерции сечения вала (трубчатого ![]() , сплошного
, сплошного ![]() ); G — модуль упругости при кручении, G = 850 ГПа.
); G — модуль упругости при кручении, G = 850 ГПа.
Допускаемый угол закручивания 7...8° на 1 м длины вала.
Скручивающие нагрузки вызывают смятие и срез шлицев вала. Напряжение смятия шлицев от сил, действующих по их среднему диаметру,
![]() , [σсм] = 15…20 МПа
, [σсм] = 15…20 МПа
где dш.н, dш.вн — наружный и внутренний диаметры шлицевого конца вала; nш — число шлицев; lш — длина шлица.
Напряжение среза (считая, что шлицы срезаются у основания по диаметру dш.вн; bш — ширина шлица)
![]() [τср] =25...30 МПа
[τср] =25...30 МПа
Осевые нагрузки в карданной передаче возникают в шлицевом соединении при перемещениях, связанных с изменением расстояния между шарнирами, например при колебаниях кузова на рессорах. Исследования показали, что даже при наличии большого количества смазочного материала последний не удерживается на поверхности трения и перемещение в шлицевом соединении происходит в условиях граничного трения. При этом коэффициент трения μ = 0,2, а иногда (при появлении задиров) μ = 0,4. При передаче большого крутящего момента в шлицевом соединении происходит защемление, и карданный вал, по существу, передает тяговое усилие. При этом двигатель, установленный на упругих подушках, продольно смещается в некоторых автомобилях на 10 мм, а иногда и больше. Большие осевые силы (в грузовых автомобилях 20...30 кН) независимо от того, смазано шлицевое соединение или нет, создают дополнительные нагрузки на карданные шарниры, промежуточную опору карданной передачи, а также на подшипники коробки передач и главной передачи. Повышенное трение в шлицевом соединении приводит к быстрому изнашиванию шлицев и к нарушению в связи с этим балансировки карданной передачи.
Осевые силы являются одной из главных причин того, что долговечность карданных передач в 2...3 раза ниже долговечности основных агрегатов автомобиля. Осевая сила
![]()
Сечение трубы карданного вала определяют исходя из напряжения на кручение:
τт=16ТmахDн/π(D4н –D4вн),
где τТ — предел текучести материала вала.
2. Ходовая часть шасси автомобиля
2.1 Подвески автомобиля
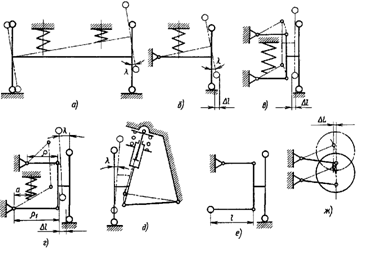
Рисунок 14. Кинематические схемы подвесок автомобиля
а — зависимой; б — однорычажной независимой; в — двухрычажной независимой с рычагами равной длины; г — двухрычажной независимой с рычагами разной длины; д — независимой рачажно-телескопической (ВАЗ-2108); е — независимой двухрычажной с торсионом; ж — независимой с продольным качанием.
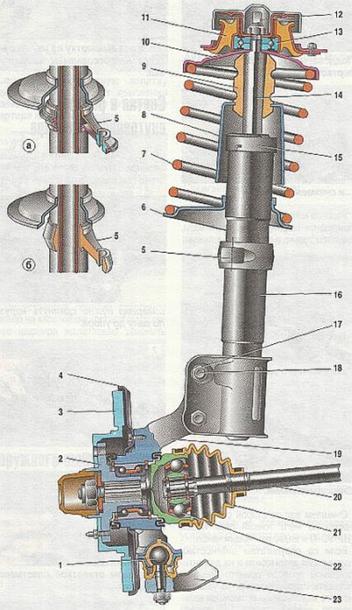
Передняя подвеска автомобиля ВАЗ-2108
1 - шаровая опора; 2 -
ступица; 3 - тормозной диск; 4 - защитный кожух; 5 - поворотный рычаг; 6 -
нижняя опорная чашка; 7 - пружина подвески; 8 - защитный кожух; 9 - буфер
сжатия; 10 - верхняя опорная чашка; 11 - резиновый элемент верхней опоры; 12 -
защитный колпак; 13 - подшипник верхней опоры; 14 - шток; 15 - опора буфера
сжатия; 16 - телескопическая стойка; 17 - гайка; 18 - эксцентриковый болт; 19 -
поворотный кулак; 20 - вал привода переднего колеса; 21 - защитный чехол
шарнира; 22 - наружный шарнир вала; 23 - нижний рычаг; а - стойка с полым
поворотным рычагом; б - стойка с цельнометаллическим поворотным рычагом.
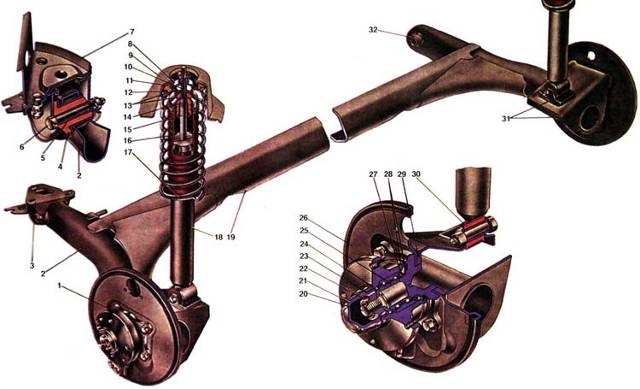
Задняя подвеска автомобиля ВАЗ-2108
1. Ступица заднего колеса; 2. Рычаг задней подвески; 3. Кронштейн креплений рычага подвески; 4. Резиновая втулка шарнира рычага; 5. Распорная втулка шарнира рычага; 6. Болт крепления рычага задней подвески; 7. Кронштейн кузова; 8. Опорная шайба крепления штока амортизатора; 9. Верхняя опора пружины подвески; 10. Распорная втулка; 11. Изолирующая прокладка пружины подвески; 12. Пружина задней подвески; 13. Подушки крепления штока амортизатора; 14. Буфер хода сжатия; 15. Шток амортизатора; 16. Защитный кожух амортизатора; 17. Нижняя опорная чашка пружины подвески; 18. Амортизатор; 19. Соединитель рычагов; 20. Ось ступицы: 21. Колпак; 22. Гайка крепления ступицы колеса; 23. Уплотнительное кольцо: 24. Шайба подшипника; 25. Подшипник ступицы; 26. Щит тормоза; 27. Стопорное кольцо; 28. Грязеотражатель: 29. Фланец рычага подвески; 30. Втулка амортизатора; 31. Кронштейн рычага с проушиной для крепления амортизатора; 32. Резинометаллический шарнир рычага подвески.
Анализ и оценка элементов конструкции подвески автомобиля
Рычажно-телескопическая подвеска передних колес автомобиля —качающаяся свеча (рис. 17) обеспечивает незначительные изменения колеи, развала и схождения колес, при этом замедляется изнашивание шин, улучшается устойчивость автомобиля. Подвеска имеет один поперечный рычаг внизу, ее основной элемент — амортизаторная стойка, имеющая верхнее шарнирное крепление под крылом, что обеспечивает большое плечо между опорами стойки. В верхней опоре имеется подшипник, необходимый для исключения закручивания пружины, что могло бы вызвать стабилизирующий момент и дополнительные изгибающие нагрузки. Малые размеры и масса, большое расстояние по высоте между опорами, большой ход также относятся к преимуществам этой подвески. Конструктивные трудности обусловлены нагружением крыла в точке крепления верхней опоры.
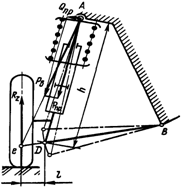
Рисунок 17. Расчетная схема рычажно-телескопической подвески
На рисунке 17 показаны силы, действующие в рычажно-телескопической подвеске. По линии еА действует сила Рв, которая может быть разложена на две составляющие силы: Рпр, действующую на пружины, и Qпр, перпендикулярную оси стойки, приложенную в точке А к опоре стойки. Под действием этой силы повышается трение штока поршня в направляющей стойке. В результате ухудшается реагирование подвески на мелкие дорожные неровности.
При совмещении осевой линии подвески с линией еА силы Рв и Рпр совпадут, а поперечная сила Qпр исчезнет. Для этой цели пружины располагают под углом или смещают пружину в сторону колеса.
Зависимая подвеска отличаются тем, что вертикальное перемещение колеса сопровождается изменением угла λ, что вызывает гироскопический эффект, возбуждающий колебания колеса относительно шкворня.
Нагрузки на подвеску автомобиля
Нагрузки на упругий элемент:
Зависимая подвеска (рис. 18, а). Нагрузка зависит от реакции Rz на колесо и веса неподрессоренных масс Gн.м:
PP = Rz — 0,5 Gн.м
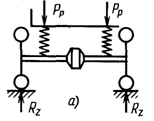
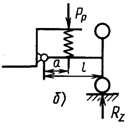
Рисунок 18. Расчетная схема для определения нагрузок на упругие элементы подвески
При этом прогиб упругого элемента равен перемещению колеса относительно кузова fр = fк.
Независимая подвеска.
Для двухрычажной подвески (рис. 19, а) нагрузка на упругий элемент
Pp = (Rz — G'к) l / a,
где G'к — вес колеса и направляющего устройства.
А прогиб fp = fк a / l.
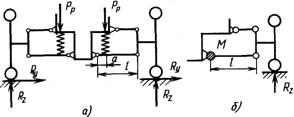
Рисунок 19. Расчетная схема для определения нагрузок на упругие элементы подвески
Пружины в качестве основных упругих элементов широко применяются в подвесках легковых машин повышенной проходимости и в качестве вспомогательных элементов, например ограничителей или корректирующих устройств, на других машинах. В первом случае используются цилиндрические пружины, витые из прутка круглого или прямоугольного сечения; характеристика их линейна. Для ограничителей хода применяются конические пружины.
Усилие, сжимающее пружину, определяется кинематической схемой подвески.
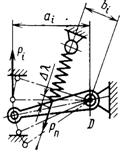
Рисунок 20. Расчетная схема подвески с цилиндрической пружиной
Pn = (Pi ai,)/bi
Усилие Рn может быть выражено также следующим образом:
Pn = λּcn,
Pnmax = λmaxּcn,
где λmах — максимальная деформация пружины; сn — жесткость пружины.

где τmах — максимальное напряжение в пружине; d — диаметр прутка; D — средний диаметр пружины; τдоп — допускаемое напряжение; τдоп = 600-700 МПа.
2.2 Колёса и шины автомобиля
Колесный движитель представляет собой устройство, преобразующее работу двигателя в поступательное движение машины. Он состоит из трех основных частей: шины, обода и ступицы.
Анализ и оценка конструкции автомобильных шин и колес
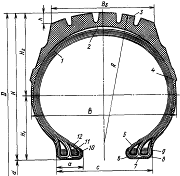
Рисунок 21 - Радиальный разрез покрышки
1— каркас; 2 — брекер; 3 — протектор; 4 — боковина; 5 — борт; 6 — носок борта; 7 — основание борта; 8 — пятка борта; 9 — бортовая лента; 10 — бортовая проволока; 11 — обертка; 12 — наполнительный шнур; H — высота профиля покрышки; H1 — расстояние от основания до горизонтальной осевой линии профиля; H2 — расстояние от горизонтальной оси до экватора; В — ширина профиля; B6 — корона; R — радиус кривизны протектора; D — наружный диаметр шины; d — посадочный диаметр шины; h — стрела дуги протектора; С — ширина раствора бортов; а — ширина борта.
2.3 Полуоси, балка и поворотный кулак автомобиля
Т.к. автомобиль ВАЗ-2108 является переднеприводным значит у него не заднего моста.
При прямолинейном движении значения моментов M и сил P принимаются максимальными. Рассмотрим изгиб балки вертикальной плоскости (рис. 22).
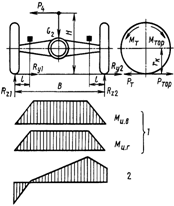
Рисунок 22. Расчетная схема балки ведущего моста и эпюры моментов
Изгибающий момент
Ми.в = R''z1l = R''z2l,
где R''z1 и R''z2 — нормальные реакции опорной поверхности за вычетом веса Колеса GK.
Нормальные реакции опорной поверхности от нагрузки на мост G2
Rz1 = Rz2 = m2G2/2,
где m2 = 1,1...1,2— коэффициент перераспределения нагрузки по мостам.
Изгиб картера в горизонтальной плоскости под нагрузкой от силы тяги Рт
Ми.г = Pт1l = Pт2l,
где Рт1=Рт2 = Rz1φ = Rz2φ, (φ = 0,8...0,9 — коэффициент сцепления шин с опорной поверхностью).
Момент, скручивающий балку, Мкр = Pт1rк = Rт2rк (rк—радиус качения колеса).
Результирующее напряжение от изгиба и кручения для круглого трубчатого сечения
![]() ,
,
где W = 0,2(D4 — d4)/D — момент сопротивления трубчатого сечения.
Для прямоугольного и коробчатого сечения напряжения в вертикальной и горизонтальной плоскостях определяют раздельно и суммируют арифметически: σи = Mи.в / Wв + Mи.г /Wг. Напряжения кручения при этом не суммируют:
τ = Mкр / Wкр = Рт1rк / Wкр = Рт2rк / Wкр,
Максимальные напряжения изгиба относятся к крайним волокнам сечения, а напряжения кручения к средним волокнам сечения.
При заносе балку моста рассчитывают на изгиб в вертикальной плоскости, считая при этом Рт1=Рт2 = 0.
Изгибающие моменты в вертикальной плоскости
Mи1 = R"z1l — Py1rK; Mи2 = R"z2l + Py1rK.
Ry1 и Ry2 — боковые реакции при заносе:
Ry1 = R'z1 φ; R'z1 = 0,5 G2 (1 + 2 φ H / В);
Ry2 = R'z2 φ; R'z2 = 0,5 G2 (1 — 2 φ H / В);
где R'z1 и R'z2 — нормальные реакции опорной поверхности при заносе.
Условно принимается φ = 1.
Эпюры моментов от R'z и Py1 строятся раздельно, а затем складывают. Опасное сечение картера находится в месте крепления рессоры: здесь напряжение изгиба σи = Ми / W.
При динамическом нагружении изгибающий момент в вертикальной плоскости:
Ми = Rz1 Kдl,
где Кд=1,5...3 — коэффициент динамичности.
Напряжение изгиба σи = Ми / W.
Для балок мостов, литых из стали и чугуна, [τи] = 300 МПа, для штампованных из стального листа [τи] = 500 МПа.
Определение нагрузок и расчет переднего моста производят так же, как и заднего моста. При торможении коэффициент перераспределения нагрузки на передний мост m1 = 1,1.„1,2. Необходимо учитывать переменное сечение балки: двутавровое в средней части и после рессорной площадки постепенно переходящее в круглое. Вертикальные реакции Rzl = Rz2 = m1G1/2, где G1 — нагрузка на передние колеса.
Для балки управляемого моста жесткость важна для сохранения углов установки колес. Жесткость ведущего моста влияет на условия зацепления зубчатых передач, на нагрузку подшипников и на нагруженность полуосей.
Прогиб балки равен силе в заданном сечении, отнесенной к жесткости сечения f = Pи / (EJx). Балка нагружена в местах крепления рессор. Переменное сечение балки затрудняет расчет. В таких случаях или упрощают схему и ведут расчет по наиболее опасному сечению, или усложняют расчет, применяя метод конечных элементов.
Прогиб балки грузовых автомобилей достигает 2...3 мм.
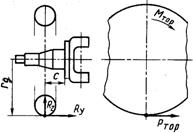
Рисунок 23. Расчетная схема поворотной цапфы
Поворотный кулак (рис. 23). Расчет ведется для тех же трех случаев нагружения: торможения при прямолинейном движении, заноса и динамического нагружения.
При торможении суммарный момент изгиба в вертикальной плоскости
![]() ,
,
где R''z1 = Rzl — Gк; Ртор = Rzφ — тормозная сила на колесе, нагружающая цапфу.
Напряжение изгиба:
σи = Ми / W.
При заносе напряжение изгиба на цапфе при Ртор = 0
σи1=(R''z1 — Ry1rк)/W; σи2=(R''z2с — Ry2rк)/W.
При динамическом нагружении напряжение изгиба
σи = Rz1с Кд / W,
где коэффициент динамичности Кд = 1,5...3.
Для стали 30Х и 40Х допускаемое напряжение [σи] = 500 МПа.
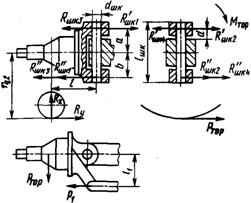
Рисунок 24. Расчетная схема шкворня
Шкворень. Расчетные режимы, применяемые при расчете шкворня, те же, что и при расчете цапф. Наклоном шкворня пренебрегаем.
При торможении реакции, нагружающие верхний R'шк и нижний R''шк концы шкворня, обусловленные действием:
реакции Rz :
R'шк1 = R''шк1 = Rzl / (a + b);
силы Ртор :
R'шк2 = Рторb / (a + b); R''шк2 = Рторa / (a + b);
реактивной силы:
R'шк3 = Р1b / (a + b); R''шк3 = Р1a / (a + b),
где P1 = Рторl / l1;
тормозного момента Мтор = Рторrк
R'шк4 = Рторrк / (a + b).
Суммарная сила, действующая на нижний конец шкворня,
![]() .
.
Суммарная сила, действующая на верхний конец шкворня:
![]() .
.
На шкворень действуют напряжения:
изгиба σи = R''шкΣd / Wи;
среза τcp = 4P''шкΣ / (πd2шк);
смятия σсм = R''шкΣ/(dшкlшк).
Для расчета принимают наибольшее из значений Р'шкΣ, Р''шкΣ.
При заносе действуют только поперечные силы.
От вертикальной реакции:
R'шк1 = R''z1 l / (a + b); R''шк1 = R''z1 l / (a + b),
где R''z1(2) = = R''z1(2) — Gк.
От боковой силы Ry и от момента, создаваемого этой силой:
левый шкворень R'шк1 = R''шк1 = Ry1 l / (a+b)
правый шкворень R'шк1 = R''шк1= Ry2 l / (а+b).
Суммарная нагрузка на левом шкворне:
R'шкΣ = [Ry1(rк—b) — R''z1 l] / (a + b);
R''шкΣ = [Ry1(rк + a) — R''z1 l] / (a + b).
Суммарная нагрузка на правом шкворне:
R'шкΣ = [Ry2(rк—b) — R''z2 l];
R''шкΣ = [Ry2(rк + a) — R''z2 l] / (a + b).
Напряжения определяются так же, как и при торможении.
При динамическом нагружении напряжение изгиба в вертикальной плоскости
σи = Rz1с Кд / W.
Расчетные режимы полуосей. Полуразгруженную полуось рассчитывают на изгиб и кручение так же как балку моста для трех случаев нагружения: прямолинейного движения, заноса и динамического нагружения.
При прямолинейном движении — результирующий изгибающий момент полуоси в вертикальной и горизонтальной плоскостях
![]()
момент кручения полуоси:
Мкр = Ртrк;
сложное напряжение:
![]() .
.
При заносе изгибающие моменты на правом и левом колесах
Mиl=Ry2rк — Rz2b; Mи2 = Ry2 rк + R"z2b.
При динамическом нагружении
вертикальная нагрузка:
Rz1 Kд = Rz2 Kд;
горизонтальная нагрузка:
Rz1 Kд φ = Rz2 Kд φ;
скручивающая нагрузка:
Ртrк = Мкр = Rz1 Kд φrк = Rz2 Kд φrк.
При расчете полуразгруженной полуоси плечо изгиба b определяется как расстояние между плоскостями, проходящими через центр опорной площадки колеса и через центр опорного подшипника.
Полностью разгруженные и разгруженные на три четверти полуоси рассчитывают только на кручение и определяют их жесткость.
Касательное напряжение кручения:
τ = Ртrк / 0,2d3; Мкр = Ртrк.
Угол закручивания полуоси:
θ = (180 / π)(Mкрl / GJкр);
здесь момент инерции Jкр = πd4/32, модуль сдвига G = 85 ГПа. Угол закручивания обычно ограничивается θ = 9...15° на 1 м длины полуоси. Меньшее значение угла закручивания характеризует повышенную жесткость, большее значение — склонность к колебаниям и резонансным явлениям.
Полуразгруженная полуось разрушается в опасном сечении под подшипником. Здесь полуось должна быть утолщена. Разгруженная полуось разрушается в месте начала шлицев. Рекомендуется осадка конца полуоси под шлицевой конец для увеличения диаметра опасного сечения.
2.4 Несущая система автомобиля
Анализ и оценка конструкции несущей системы автомобиля
В США большее распространение получили рамные конструкции, что дает возможность варьировать модели кузовов (включая открытые модификации) и обеспечить лучшую изоляцию кузова от вибрационных нагрузок. В европейских странах наиболее распространены безрамные силовые схемы, обеспечивающие наименьшую массу.
К пассажирским кузовам основные требования сводятся к регламентации планировочных размеров, рабочего места водителя, комфортабельности.
Кузова легковых автомобилей классифицируют на каркасные, скелетные и оболочковые.
Каркасные кузова выполняются из относительно массивных закрытых или открытых профилей, воспринимающих нагрузки. Облицовка из стали, дюралюминия или из стеклопластика формирует объем кузова и повышает его жесткость.
Скелетные кузова имеют каркас, образованный из профилей облегченного типа, приваренных к облицовке.
Оболочковые кузова (рис. 25) выполняются из крупных штампованных деталей, наружных и внутренних панелей, соединенных точечной сваркой в замкнутую силовую систему преимущественно из стального листа толщиной 0,6...0,8 мм. Кузова такого типа наиболее распространены, так как обладают технологическими, преимуществами (автоматическая сварка панелей может выполняться на конвейере).
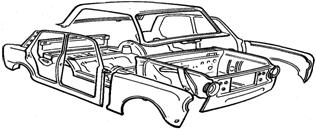
Рисунок 25. Оболочковый кузов легкового автомобиля
Нагрузочные режимы кузовов
На неподвижный автомобиль действуют статические нагрузки от собственной массы и полезной нагрузки. При движении автомобиль испытывает динамические нагрузки от неровностей дороги, от разгона и торможения, при поворотах и от веса агрегатов. Работоспособность кузова характеризуется его прочностью и жесткостью под действием динамических нагрузок.
Кузов подвержен изгибу и кручению: симметричная нагрузка вызывает изгиб, кососимметричная нагрузка — кручение в вертикальной и горизонтальной плоскостях. Статическая нагрузка, умноженная на ускорение, определяет динамическую нагрузку, так же как при нагружении рамы.
Пространственная система кузова трудно поддается расчету на сложные напряжения изгиба и кручения. Поэтому кузов условно расчленяют на отдельные элементы и рассчитывают их на изгиб и кручение раздельно.
Наиболее достоверную информацию о напряженном состоянии кузова получают методом тензометрирования как в стендовых, так и в дорожных условиях.
Прочность оценивают по пределу текучести материалов. При одностороннем растяжении или сжатии допускаемое напряжение:
σ = σ s/ Кбез.
Условия прочности при изгибе:
σст + σд ≤ σи или σст ≤ σs Кбез (1 — Кд)
при кручении σк ≤ σs Кбез (1 + 1 / Кд).
При наличии сложного напряженного состояния эквивалентное напряжение
![]() .
.
Удельная крутильная жесткость характеризует сопротивление кузова закручиванию и представляет собой отношение момента к вызванному углу закручивания на длине базы автомобиля, умноженному на размер базы, для легковых автомобилей она составляет 130...300 Н∙м2/°.
Изгиб кузова в вертикальной плоскости характеризует удельная изгибная жесткость — отношение нагрузки к вызванному прогибу, умноженному на размер базы в третьей степени (прогиб балки пропорционален третьей степени длины пролета); для легковых автомобилей она составляет 850...2200 Н∙м3/мм.
Наиболее полное приближение к результатам натурных испытаний несущей системы дает расчет кузова и рамы с использованием метода конечных элементов. Этот метод расчета многократно статически неопределимых конструкций основан на совместном рассмотрении напряженного состояния системы небольших элементов конечного размера. Метод конечных элементов заключается в том, что реальная конструкция заменяется структурной моделью, состоящей из простейших элементов, таких, как стержни, пластины и др. объемные элементы с известными упругими свойствами. Исходя из того, что упругие свойства отдельных элементов известны, можно определить свойства всей системы в целом при определенных нагрузках. Процесс расчета осуществляется в несколько этапов. На этапе предварительной подготовки конструкцию разбивают на простые элементы. Например, разбиение кузова производят на одной половине по оси симметрии примерно на 200—500 элементов. На этапе получения предварительной модели определяют координаты узловых точек. Эта работа занимает по времени несколько недель или даже месяцев. Затем проводится расчет с использованием ЭВМ по специально разработанным программам. На рисунке 38 показана для примера структурная модель кузова легкового автомобиля, построенная в результате подготовительных этапов с помощью графопостроителя.
Следует помнить, что структурная модель рассмотрена без учета различных мелких элементов (отверстий, гофр, сварки и др.), которые могут оказать заметное влияние на напряженное состояние кузова и нуждаются в последующей экспериментальной проверке.
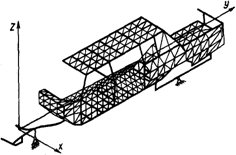
Рисунок 26. Расчетная структурная модель кузова легкового автомобиля
3. Система управления шасси автомобиля
3.1 Тормозная система автомобиля
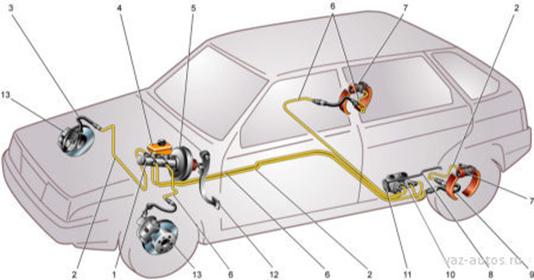
1 – главный цилиндр гидропривода тормозов; 2 – трубопровод контура «правый передний – левый задний тормоз»; 3 – гибкий шланг переднего тормоза; 4 – бачок главного цилиндра; 5 – вакуумный усилитель; 6 – трубопровод контура «левый передний – правый задний тормоз»; 7 – тормозной механизм заднего колеса; 8 – упругий рычаг привода регулятора давления; 9 – гибкий шланг заднего тормоза; 10 – регулятор давления; 11 – рычаг привода регулятора давления; 12 – педаль тормоза; 13 – тормозной механизм переднего колеса.
Анализ и оценка конструкции тормозной системы автомобиля
Тормозной механизм.
Для оценки конструктивных схем тормозных механизмов служат следующие критерии:
Коэффициент тормозной эффективности. Отношение тормозного момента, создаваемого тормозным механизмом, к условному приводному моменту
Кэ = Мтор /(∑Рrтр),
где Мтор — тормозной момент; ∑Р — сумма приводных сил; rтр — радиус приложения результирующей сил трения (в барабанных тормозных механизмах — радиус барабана rб, в дисковых — средний радиус накладки rср).
Тормозная эффективность должна оцениваться раздельно при движении вперед и назад.
Дисковые тормозные механизмы.
Дисковые тормозные механизмы применяются главным образом на легковых автомобилях: на автомобилях большого класса на всех колесах; на автомобилях малого и среднего классов — в большинстве случаев только на передних колесах (на задних колесах применяются барабанные тормозные механизмы).
В последние годы дисковые тормозные механизмы нашли также применение на грузовых автомобилях ряда зарубежных фирм.
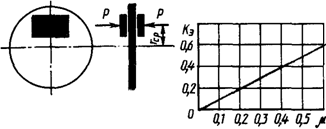
Рисунок 28 - Схема дискового тормозного механизма и его статическая характеристика
Схема и статическая характеристика дискового тормозного механизма приведены на рисунке 28. Для него тормозной момент
Мтр = 2Р μ rср,
а коэффициент эффективности
Кэ = Мтр / (2Р rср) = μ.
При расчетном коэффициенте трения μ = 0,35 коэффициент эффективности Кэ = 0,35. Из этого можно заключить, что дисковый тормозной механизм обладает малой эффективностью (как можно будет увидеть дальше — минимальной сравнительно с другими тормозными механизмами). Так, при расчетном коэффициенте трения μ = 0,35 тормозной момент примерно в 3 раза меньше приводного момента. Основным достоинством дискового тормозного механизма является его хорошая стабильность, что отражено в статической характеристике, которая имеет линейный характер. В настоящее время стабильности отдается предпочтение перед эффективностью, так как необходимый тормозной момент можно получить увеличением приводных сил в результате применения рабочих цилиндров большего диаметра или усилителя.
Барабанные тормозные механизмы.
Рассмотрим силы, действующие на колодку барабанного тормозного механизма (рис. 29, а).
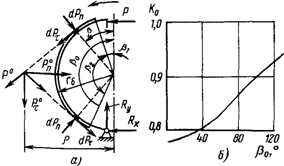
Рисунок 29. Схема сил, действующих на колодку барабанного тормозного механизма, и характеристика
Колодка прижимается к тормозному барабану под действием силы Рτ. При вращении барабана по направлению, указанному стрелкой, между барабаном и накладкой колодки возникают силы взаимодействия. Выделим элементарную нормальную силу dРn и элементарную касательную силу dРτ.
Элементарная нормальная сила
dРn = μ dF = p b rб dβ,
где р — давление на накладки; dF — элементарная площадка накладки; b — ширина накладки; rб — радиус барабана; β — угловая координата элементарной площадки.
Элементарная касательная сила (сила трения)
dРτ = μ dРn = μ p b rб dβ
Тормозной момент, создаваемый колодкой,
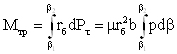 .
.
Чтобы проинтегрировать это выражение, необходимо знать, как изменяется давление по длине накладки. При расчетах обычно принимают равномерное распределение давления или распределение по синусоидальному закону р = pmaxsinβ (возможно применение и других законов изменения давления).
При равномерном распределении давления Mтр = μbrб2pβ0 (β0 = β2 — β1 — угол охвата накладки), а при распределении по синусоидальному закону
Mтр = μbrб2p (cos β1 — cos β2).
С достаточной для практических целей точностью можно принять распределение давления по длине накладки равномерным. Это допущение используется далее при сравнительной оценке различных схем тормозных механизмов.
Как
видно из схемы, равнодействующая сил трения (условная) ![]() приложена на радиусе
ρ, который зависит от угла β0 = = 90...120°. При расчетах
тормозного момента равнодействующую сил трения обычно приводят к радиусу
тормозного барабана, что позволяет использовать упрощенные формулы. С этой
целью вводят коэффициент k0, который можно определить, приравняв
момент трения и колодках Mтр =
приложена на радиусе
ρ, который зависит от угла β0 = = 90...120°. При расчетах
тормозного момента равнодействующую сил трения обычно приводят к радиусу
тормозного барабана, что позволяет использовать упрощенные формулы. С этой
целью вводят коэффициент k0, который можно определить, приравняв
момент трения и колодках Mтр = ![]() ρ расчетному
моменту трения Mтр = = Рτ rб, тогда
ρ расчетному
моменту трения Mтр = = Рτ rб, тогда
Mтр = ![]() ρ
= Рτ rб,
ρ
= Рτ rб,
где Рτ — сила трения, действующая в колодку на плече rб. Отсюда
k0 = rб / ρ = ![]() / Рτ =
/ Рτ = ![]() / Pn;
/ Pn; ![]() =
k0 Pn
=
k0 Pn
Коэффициент k0 может быть найден по графику рисунок.
Тормозной механизм с равными приводными силами и односторонним расположением опор — схема сил, действующих на колодки, и статическая характеристика показаны на рисунке 30.
На схеме Р' = Р" = Р — приводные силы; Р'n, Р"n — равнодействующие нормальных сил, действующих со стороны тормозного барабана на колодки; P'τ, P"τ — силы трения, действующие на колодки; R'x, R''x, R'y, R''y — реакции опор.
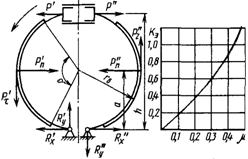
Рисунок 30. Схема тормозного механизма с равными приводными силами и односторонним расположением опор и его статическая характеристика
Для активной колодки сумма моментов сил относительно точки опоры колодки
Ph + P'τ rб — k0P'n a = 0.
Принимая во внимание, что P'τ = μP'n, подставим значение P'n в уравнение моментов и решим его относительно P'τ:
![]() .
.
Момент трения, создаваемый активной колодкой,
![]() .
.
При k0a = μ rб, Мтр = ∞ тормозной механизм заклинивается.
Для пассивной колодки сумма моментов сил относительно точки опоры колодки,
Ph — P''τ rб — k0P''n a = 0.
Момент трения, создаваемый пассивной колодкой,
![]() .
.
Тормозной момент, создаваемый обеими колодками,
 .
.
Реакции опор:
активной колодки:
R'y = P'τ; R'x = P'n — P,
где P'n = P'τ / μ = Ph / (k0a — μ rб);
пассивной колодки:
R''y = P''τ; R''x = P''n — P,
где P''n = Ph / (k0a + μrб).
В дальнейшем для сравнительной оценки различных схем тормозных механизмов введем упрощения — будем считать a ≈ rб; k0 = 1; μ = 0,35. Оценить тормозной механизм можно по следующим параметрам:
отношению тормозных моментов, создаваемых активной и пассивной колодками,
М'тр / М''тр = (k0a + μ rб) / (k0a — μ rб);
или, приняв указанные выше упрощения,
М'тр / М''тр = (1 + μ) / (1 — μ) = 1,35 / 0,65 ≈ 2
При принятых упрощениях активная колодка обеспечивает примерно в 2 раза больший тормозной момент по сравнению с пассивной, что приводит к ускоренному ее изнашиванию. Возможно применение ступенчатых цилиндров, в которых поршень большего цилиндра воздействует на пассивную колодку, но при этом неоправданно усложняется конструкция; причем:
коэффициент тормозной эффективности (при тех же упрощениях)
Кэ = 2 μ /(1 — μ 2) = 0,8;
тормозная эффективность одинакова независимо от направления движения;
статическая характеристика тормозного механизма нелинейна, что свидетельствует о недостаточной стабильности;
в результате неуравновешенности P'n ≠ P''n и P'τ ≠ P''τ, при торможении на подшипники ступицы колеса действует дополнительная нагрузка.
Схема тормозного привода автомобилей ВАЗ-2108 представлена на рисунке 31. Здесь применен главный тормозной цилиндр типа «Тандем», в котором имеются две секции с автономным питанием тормозной жидкостью. Передняя секция связана трубопроводом с задним тормозным контуром, а задняя — с передним контуром.
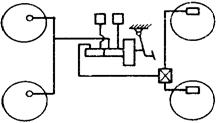
Рисунок 31. Схема двухконтурного тормозного гидропривода автомобиля ВАЗ-21008
Если не учитывать трения, реакции клапанов и усилия пружин, то уравнение равновесия реактивной шайбы примет вид
pж F4 — Pпед uпед — (pБ — pА) F3 = 0, (1)
где pж — давление тормозной жидкости в главном цилиндре; F4 — площадь поршня гидроцилиндра; pА и pБ — давление в полостях соответственно А и Б; F3 — активная площадь поршня.
С достаточным приближением можем считать, что давление р0 во всех точках Реактивной шайбы одинаково.
Тогда
pж F4 = p0 F2; (2)
Pпед uпед = p0 F1, (3)
где F1 и F2 — торцовые площади соотвественно плунжера и реактивной шайбы.
Определим из этих уравнений усилие на штоке
(pБ — pА) F3 = p0 (F2 — F1). (4)
Подставим полученное значение в уравнение (1):
(pБ — pА) F3 = Pпед uпед (F2 — F1) / F1. (5)
Из этого уравнения видно, что усилие, создаваемое усилителем, прямо пропорционально усилию на педали.
Разделив обе части уравнения (6) на Pпед uпед, получим значение коэффициента усиления
Ку = (pБ — pА) F3 / (Pпед uпед) = (F2 — F1) / F1.
Как видно из этого уравнения, коэффициент усиления увеличивается с увеличением площади поршня , с уменьшением торцовой площади плунжера или с ростом площади реактивной упругой шайбы. Следует отметить, что изменение соотношения площадей F2 и F1, в отличие от площади F3, не влияет на усилие, развиваемое усилителем, а только изменяет усилие на педали.
3.2 Рулевое управление автомобиля
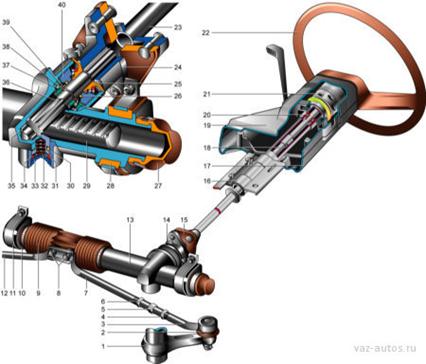
1 – поворотный рычаг; 2 – шаровой шарнир наконечника; 3 – наружный наконечник рулевой тяги; 4, 6 – контргайка; 5 – регулировочная тяга (муфта); 7, 12 – внутренний наконечник рулевой тяги; 8 – болты крепления внутреннего наконечника рулевой тяги к рейке; 9 – защитный чехол; 10, 28 – опоры рулевого механизма; 11 – скоба крепления рулевого механизма; 13 – картер рулевого механизма; 14 – стяжной болт муфты; 15 – эластичная муфта; 16 – кронштейн крепления вала рулевого управления; 17 – нижняя часть облицовочного кожуха; 18 – вал рулевого управления; 19 – верхняя часть облицовочного кожуха; 20 – подшипник; 21 – демпфер; 22 – рулевое колесо; 23 – промежуточный вал рулевого управления; 24 – фланец эластичной муфты; 25 – пыльник; 26 – уплотнительное кольцо; 27 – защитный колпачок; 29 – рейка; 30 – уплотнительное кольцо упора; 31 – упор рейки; 32 – пружина; 33 – гайка упора; 34 – стопорное кольцо гайки упора; 35 – роликовый подшипник; 36 – приводная шестерня; 37 – шариковый подшипник; 38 – стопорное кольцо; 39 – защитная шайба; 40 – гайка подшипника.
Анализ и оценка рулевого управления автомобиля
Минимальный радиус поворота автомобиля. Расстояние от центра поворота до центра пятна контакта шины с дорогой (оси следа) внешнего колеса при наибольшем угле поворота управляемых колес обычно приводится в технических характеристиках автомобилей и называется минимальным радиусом поворота.
Минимальный радиус поворота двухосного, трехосного автомобилей с жестким передними управляемыми колесами
Rнmin = L / sinθнmax
где θнmax — максимальный угол поворота наружного управляемого колеса.
Минимальный радиус поворота автомо-со всеми управляемыми колесами
Rнmin = L / (2 sinθнmax).
При определении Rнmin расстоянием от оси шкворня до центра пятна контакта шины обычно пренебрегают.
Общий КПД рулевого управления. Этот параметр определяется произведением КПД рулевого механизма и рулевого привода:
ηру= ηрм ηрп.
Угловое передаточное число рулевого управления. Отношение элементарного угла поворота рулевого колеса к полусумме элементарных углов поворота наружного и внутреннего колес uω = dα/dθ, (где dθ = (dθн + dθв) / 2) —угловое передаточное число. Оно переменно и зависит от передаточных чисел рулевого механизма uрм и рулевого привода uрп:
uω = uрм uрп.
Передаточное число рулевого механизма uрм — отношение элементарного угла поворота рулевого колеса к элементарному углу поворота вала сошки. В зависимости от конструкции рулевого механизма оно может быть постоянным в процессе Поворота рулевого колеса или переменным. Считается, что рулевые механизмы с переменным передаточным числом (uРМmax соответствует нейтральному положению рулевого колеса) целесообразно применять для легковых автомобилей. Это обеспечивает большую безопасность движения на повышенных скоростях, так как малый угол поворота рулевого колеса не вызывает значительного поворота управляемых колес. Для грузовых автомобилей и особенно для автомобилей высокой проходимости, не оборудованных рулевыми усилителями, целесообразно применять рулевые механизмы, uРМmax которых соответствует крайним положениям рулевого колеса, что облегчает управление автомобилем при маневрировании.
Передаточное число рулевого привода uрп — отношение плеч рычагов привода. Поскольку положение рычагов в процессе поворота рулевого колеса изменяется, то передаточное число рулевого привода переменно: uрп = 0,85...2,0. Большие значения выбирают для специальных автомобилей.
Силовое передаточное число рулевого управления. Его оценивают отношением суммы сил сопротивления повороту управляемых колес к усилию, приложенному к рулевому колесу. Иногда под силовым передаточным числом понимают отношение момента сопротивления повороту управляемых колес Мc к моменту, приложенному на рулевом колесе Мр.к:
uс = Мс / Мр.к.
Силовое передаточное число может служить критерием оценки легкости управления по усилию, приложенному к рулевому колесу для поворота управляемых колес. При проектировании автомобилей ограничивается как минимальное (60 Н), так и максимальное (120 Н) усилие.
Ограничение минимального усилия необходимо, чтобы водитель не терял «чувства дороги». Для поворота на месте на бетонной поверхности усилие не должно превосходить 400 Н. По ГОСТ 21398-75 максимальное усилие при выходе из строя усилителя не должно превышать 500 Н у грузовых автомобилей.
Оценка действующих нагрузок на детали рулевого механизма и рулевого привода автомобиля
КПД рулевого механизма. От КПД рулевого механизма в значительной стегни зависит легкость управления. КПД пулевого механизма при передаче усилия от рулевого колеса к сошке — прямой КПД:
η ↓рм = 1 — Mтр1 / Мр.к,
где Mтр1 — момент трения рулевого механизма, приведенный к рулевому колесу; Мр.к — момент, приложенный к рулевому колесу.
Обратный КПД характеризует передачу усилия от сошки к рулевому колесу:
η ↑рм = 1 — Mтр2 / Мв.с,
где Mтр2 — момент трения рулевого механизма, приведенный к валу сошки; Afn.c — момент на валу сошки, подведенный от управляемых колес.
Как прямой, так и обратный КПД зависят от конструкции рулевого механизма и имеют следующие значения:
η ↓рм = 0,6...0,95; η ↑рм = 0,55...0,85.
Если учитывать трение только в зацеплении рулевой пары, пренебрегая трением в подшипниках и сальниках, то для червячных и винтовых механизмов
η ↓рм = tgβ/tg(β + ρ);
η ↑рм = tg(β — ρ) / tgβ,
где β — угол подъема винтовой линии червяка или винта; ρ — угол трения.
Так, если принять (β =12° и ρ = 8°, то η ↓рм = 0,6, а η ↑рм = 0,33, т. е. обратный КПД в 2 раза ниже прямого. Пониженный обратный КПД, хотя и способствует поглощению толчков на рулевое колесо, но в то же время затрудняет стабилизацию Управляемых колес. При прямом КПД η↓рм ≤ 0,5 обратный КПД η↑рм ~ 0, рулевая пара становится необратимой и стабилизация отсутствует.
Шестеренные рулевые механизмы.
Для анализа рулевого механизма рассмотрим отношение элементарного угла поворота шестерни к элементарному перемещению рейки. При нормальном npoфиле зубьев шестерни и нормальном профиле зубьев рейки это отношение посто-янно: dα/dS = const. Для большинства применяемых реечных рулевых механизмов это отношение постоянно. Однако в последнее время появились реечные рулевые пары с переменным отношением dα/dS, что достигается нарезкой зубьев рейкой специального профиля, причем в зависимости от поставленной задачи это отношение может изменяться по заданному закону.
При установке реечной рулевой пары целесообразно определять угловое передаточное число рулевого управления uω = dα/dθ α — элементарный угол поворота рулевого колеса; dθ — элементарный угол поворота управляемых колес).
Считая dα/dS = const, найдем текущее значение величины S при повороте управляемого колеса на угол ± θ:
S = la sin(θ0 ± θ),
дифференцируя, получим
dS = la cos(θ0 ± θ) dθ.
Сделав допущение, что rdα = dS, т.е. угловое перемещение поперечной тяги мало влияет на перемещение рейки, получим угловое передаточное число рулевого управления:
uω = dα/dθ = la cos(θ0 ± θ) / r.
Таким образом, угловое передаточное число рулевого управления с реечной рулевой парой переменно. Усилие, передаваемое шестерней на зубчатую рейку,
Px = Pр.к Rр.к / rω,
где Pр.к — усилие на рулевом колесе; Rр.к — радиус рулевого колеса; rω — начальный радиус шестерни.
Рулевой привод.
Упругая характеристика рулевого управления. При абсолютно жестких элементах рулевого управления угловое передаточное число отражает жесткую кинематическую связь между углом поворота рулевого колеса и углами поворота управляемых колес. Такое угловое передаточное число принято называть кинематическим.
На современных автомобилях угловая податливость рулевого управления варьируется на легковых автомобилях от 1... 3,5°/(Н-м). Рулевые управления грузовых автомобилей имеют меньшую податливость. Податливость рулевого управления определяют при закрепленных управляемых колесах: измеряют углы поворота рулевого колеса и соответствующие этим углам моменты, приложенные к рулевому колесу. Для некоторых конструкций связь между углами поворота рулевого колеса и приложенными моментами нелинейна. Упругость рулевого управления может оцениваться также частотой собственных Угловых колебаний системы, которая рассматривается как одномассовая:
![]()
где сφ — угловая жесткость рулевого привода; ∑JК — суммарный момент инерции управляемых колес.
Частота собственных угловых колебаний должна быть не ниже 3 Гц.
КПД. При оценке рулевого привода необходимо учитывать потери на трение во всех шарнирных соединениях. По имеющимся данным, КПД рулевого привода лежит в пределах ηрп = 0,92...0,95. Общий КПД рулевого управления ηру = ηрм ηрп.
Нагрузки в элементах рулевого управления автомобиля
Нагрузки в деталях рулевого механизма и рулевого привода можно вычислять двумя способами:
задаваясь расчетным усилием на рулевом колесе;
определяя усилие на рулевом колесе по максимальному сопротивлению повороту управляемых колес на месте, что более целесообразно.
Нагрузки, вычисленные таким образом, являются статическими. При движении автомобиля по дорогам с неровной поверх-ностью или при торможении на дороге с различными коэффициентами сцепления под управляемыми колесами ряд деталей рулевого управления воспринимает динамические нагрузки, которые лимитируют прочность и надежность рулевого управления, поэтому динамические нагрузки учи-тывают коэффициентом динамичности Кд = =1,5...3,0. Его значение выбирают в зависимости от типа автомобиля и условий эксплуатации.
Расчетное усилие на рулевом колесе для легковых автомобилей Рр.к = 400 Н, для грузовых Рр.к = 700 Н. Для определения усилия на рулевом колесе по максимальному сопротивлению повороту управляемых колес на месте необходимо рассчитать момент сопротивления повороту по одной из известных эмпирических или полуэмпирических формул:
![]()
или
![]() ,
,
где φ0 — коэффициент сцепления при повороте колеса на месте (φ0 = 0,9...1,0); Gк — нагрузка на управляемое колесо; Рш — давление воздуха в шине; Jp — полярный момент инерции пятна контакта шины; Fш — площадь поверхности контакта шины с дорогой; l — расстояние от центра отпечатка до пересечения оси шкворня с опорной поверхностью.
Площадь поверхности контакта шины с дорогой может быть приближенно определена по давлению на опорную поверхность. Для шин нормальной конструкции с внутренним давлением Рш > 0,2 МПа на опорную поверхность давление q ≈0,2 МПа, откуда Fш = Gк / q.
Усилие на рулевом колесе для поворота на месте
Рр.к = Мс / (uω Rр.к ηру).
Если вычисленное значение усилия на рулевом колесе превосходит указанное выше условное расчетное усилие, то на автомобиле требуется установка рулевого усилителя.
На основании заданного или вычисленного усилия на рулевом колесе могут быть последовательно определены нагрузки во всех деталях рулевого управления.
Рулевой вал. В большинстве конструкций его выполняют полым.
Рулевой вал нагружается моментом
Mр.к = Рр.к Rр.к.
Напряжение кручения полого вала
![]() ; [τ] = 100 МПа.
; [τ] = 100 МПа.
Проверяется также угол закрутки рулевого вала, который допускается в пределах 5...8° на один метр длины вала.
Рулевой механизм. Для механизма, включающего глобоидный червяк и ролик, определяется контактное напряжение в зацеплении
σ = Px / (Fn),
где Рх — осевое усилие, воспринимаемое червяком; F —площадь контакта одного гребня ролика с червяком (сумма площадей двух сегментов, рисунок 52); n — число гребней ролика. Осевая сила
Px = Mр.к / (rω0 tgβ),
где rω0 — начальный радиус червяка в горловом сечении; β — угол подъема винтовой линии в том же сечении.
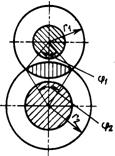
Рисунок 33. Схема для определения контактной площади в червячном рулевом механизме
Площадь контакта одного гребня ролика с червяком
F = 0,5[(φ1 — sin φ1)r21 + (φ2 — sinφ2)/ r22].
Материал червяка — цианируемая сталь 30Х, 35Х, 40Х, 30ХН; материал ролика — цементуемая сталь 12ХН3А, 15ХН; [σ] = 7...8 МПа.
Вал рулевой сошки. Напряжение кручения вала сошки при наличии усилителя
τ = (Мр.к uрм ηрм + рж πD2гц rсек) / (0,2d3),
где d — диаметр вала сошки.
Материал вала сошки — сталь 30, 18ХГТ, 20ХН3А.; [τ] = 300...350 МПа.
Рулевая сошка. Изгиб и кручение — основные виды напряжения. Расчет ведут на сложное сопротивление; шлицы (рифты) рассчитывают на срез. Усилие на шаровом пальце сошки, вызывающее изгиб и кручение (при наличии встроенного усилителя),
Рсош = Мр.к uрм ηрм / ls + рж πD2гц / 4ls,
Напряжение изгиба в опасном сечении А—А
σи = Рсош ln / Wи,
Напряжение кручения
τ = Рсош lк / Wк,
где Wи и Wк — соответственно осевой и полярный моменты сопротивления опасного сечения.
Эквивалентное напряжение рассчитывается по одной из теорий прочности. Материал сошки: сталь 30, 18ХГТ; [Wэ] = 300...400 МПа.
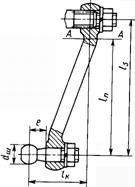
Рисунок 34. Расчетная схема рулевой сошки
Шаровой палец сошки. Напряжение изгиба
σи = Рсош ln / Wи.
Материал: сталь 40Х, 20ХН3А; [σи] = 300...400 МПа. Напряжение смятия (давление, которое определяет износостойкость шарового пальца с диаметром шара dш)
q = 4Pсош / (πd2ш); [q] = 25...35 МПа.
Напряжение среза при площади сечения шарового пальца у основания Fш.п
σcp = Pсош / Fш.п; [σcp] = 25...35 МПа.
Таким же методом определяют нагрузки на шаровые пальцы всех шарнирных соединений рулевого привода в каждом случае с учетом действующих на шаровой палец сил.
Продольная тяга. Сила Pсош вызывает напряжения сжатия-растяжения и продольного изгиба тяги.
Напряжение сжатия
σcж = Pсош / F,
где F — площадь сечения продольной тяги. Критическое напряжение при продольном изгибе
σкp = π2 E I / (L2т F),
где I — экваториальный момент инерции
сечения тяги; ![]() ; Lт — длина продольной тяги (по центрам шарниров). Запас
устойчивости
; Lт — длина продольной тяги (по центрам шарниров). Запас
устойчивости
δ = δкр / δсж = π2 E I / (Pсош L2т).
Материал тяги: сталь 20, сталь 35; [δ] = = 1,5...2,5.
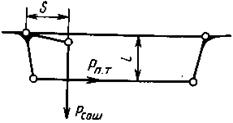
Рисунок 35. Схема для определения нагрузок в элементах рулевой сошки
Поворотный рычаг (рис. 35). Поворотный рычаг нагружается изгибающей силой Pсош и скручивающим моментом Pсошl.
Напряжение изгиба
i>σи = Рсош S / Wи.
Напряжение кручения
τ = Рсош l / Wк.
Материал: сталь 30, сталь 40 40ХГНМ; [σэ] = 300...400 МПа.
Боковые рычаги трапеции: испытывают напряжения изгиба и кручения под действием силы
Pп.т = Рсош S / l.
Напряжение изгиба σи = Рп.т l / Wи.
Напряжение кручения τ = Рп.т l / Wк.
Материал: сталь 30, сталь 40; сталь 40ХНГМ; [ σэ] = 300...400МПа
Поперечная тяга трапеции. Нагруженная силой Pп.т тяга рассчитывается по той же методике, что и продольная тяга т. е. на сжатие и продольную устойчивость ([δ]=1,5...2,5). Для изготовления поперечной тяги используют те же материалы, что и для продольной.
Список использованной литературы
1 Бочаров Н.Ф., Жеглов Л.Ф. Конструирование и расчет колесных машин высокой проходимости: Учебник для втузов/ Бочаров Н.Ф. [и др.]/ - М.: Машиностроение, - 1983, - 299 с., ил.
2 Мелисаров В.М. Анализ конструкций, элементы расчета: методические разработки/ В.М. Мелисаров [и др.]. – Тамбов: Издательство Тамбовского Государственного технического Университета, - 2008, - 84 с.
3 Осепчугов В. В., Фрумкин А. К. Автомобиль: Анализ конструкций, элементы расчета: Учебник для студентов вузов по специальности «Автомобили и автомобильное хозяйство»/Осепчугов В.В. [и др.]. — М.: Машиностроение, 1989.— 304 с, ил.
4 http://www.vaz-autos.ru/ - Ремонт и эксплуатация автомобилей ВАЗ (электронный ресурс)
| Проект придорожной станции технического обслуживания автомобилей | |
|
Содержание Аннотация Введение 1. Технологический расчет СТОА 1.1 Обоснование мощности придорожной станции технического обслуживания 1.2 Расчет ... Регулировка свободного хода рулевого колеса, педали сцепления С целью улучшения условий труда при регулировочных работах подшипников ступиц колес, рулевого управления и тормозной системы для вывешивания колес используются гидравлические ... |
Раздел: Рефераты по транспорту Тип: дипломная работа |
| Рабочие процессы и элементы расчета механизмов автомобиля Ford Fiesta | |
|
Министерство образования Российской Федерации Южно-Уральский Государственный университет Кафедра "Автомобильный транспорт" Курсовая работа на тему ... В данном семестровом задании представлены элементы расчета сцепления, КПП, главной и карданной передач, амортизатора, полуоси пружины, рулевого и тормозного механизмов, а также ... Радиус рулевого колеса ( R ), радиус поворота управляемых колёс ( R1 ), длина траектории поворота ( S ), поступательная скорость автомобиля на повороте ( Va ), усилие прилагаемое к ... |
Раздел: Рефераты по транспорту Тип: курсовая работа |
| Продольно-резательный станок производительностью 350 т/сутки | |
|
АННОТАЦИЯ В дипломном проекте приведен анализ существующих конструкций продольно-резательных станков для картоноделательных машин и рассмотрены ... 1 - вал нижних ножей; 2 - подшипники вала; 3 - шестерня для привода вала; 4 - нижний чашечный нож; 5 - верхний нож; 6 - эксцентричная ось дискового ножа; 7 - подшипники верхнего ... Это удваивает нагрузку на вал, но эта нагрузка является статической, так как при ее воздействии вал не вращается, поэтому допускаемые напряжения изгиба могут быть повышены. |
Раздел: Остальные рефераты Тип: реферат |
| ... технической эксплуатации ходовой части автомобилей "Toyota" | |
|
... национальный технический университет Автотракторный факультет Кафедра "Техническая эксплуатация автомобилей" Расчётно-пояснительная записка к ... Частичное отклонение автомобиля от направления прямолинейного движения ("виляние") в диапазоне скоростей 50...90км/ч. Основные причины: увеличенные зазоры между шаровыми пальцами и ... Регулировку подшипников ступиц колес грузовых автомобилей проверяют при свободно вращающемся тормозном барабане (не должно быть задевания тормозных колодок). |
Раздел: Рефераты по транспорту Тип: курсовая работа |
| Развитие сервисного обслуживания автомобилей | |
|
Введение По причине повышения количества легковых автомобилей в Казани за последние годы, возросла и роль станций технического обслуживания ... - проверка крепления осей педалей сцепления и тормоза, рулевых тяг, люфт рулевого колеса, подшипников ступиц колес; При замене пневмоусилителя гидропривода сцепления выпустить воздух из контура пневмопривода тормозной системы через клапан на воздушном баллоне, снять оттяжную пружину рычага вала ... |
Раздел: Рефераты по транспорту Тип: курсовая работа |