Контрольная работа: Виды передаточной характеристики
Контрольная работа по дисциплине "Автоматика и управление"
Вариант 1 - РС-711511.
Вид передаточной характеристики:
![]()
Входное воздействие: ![]()
Структурная схема звена имеет вид:
![]()
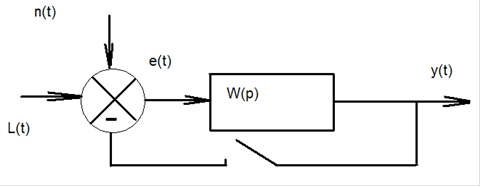
Записать передаточные функции системы в замкнутом и разомкнутом состоянии и определить устойчивость.
![]()
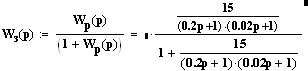
Передаточная функция системы в замкнутом виде записывается в виде:
![]()
![]()
![]()
![]()
Предполагается, что система автоматики может находиться в двух состояниях - устойчивом и неустойчивом.
Устойчивость системы определяем по критерию Гурвица.
Для этого составляем характеристическое уравнение с учётом передаточной функции системы в разомкнутом состоянии в виде:
![]()
И так как левое выражение имеет дробно-рациональный вид, то, приравняв к нулю числитель выражения, стоящий в левой части, перепишем его в виде:
![]()
![]()
![]()
Это выражение равно нулю, если:
![]() или
или
![]()
Для оценки устойчивости системы радиоавтоматики необходимо вычислить определитель Гурвица. Составим матрицу Гурвица:
![]()
![]()
![]()
![]()
![]()
Система радиоавтоматики устойчива.
Построить переходную характеристику системы в замкнутом состоянии и определить перерегулирование в системе.
Переходной характеристикой называется реакция системы на воздействие на неё единичного сигнала:
![]() , где
, где ![]()
![]()

Разложим эту дробь в сумму обыкновенных дробей:
![]()
![]()
Домножаем числители каждой дроби
на ![]() :
:
![]()
![]()
![]()
Группируем множители:
![]()
![]()
Получаем систему уравнений:
![]()
![]()
![]()
![]()
Решением этой системы уравнений являются следующие значения:
![]()
![]()
![]()
Таким образом,
![]()
![]()
Домножаем на 1000 элементы второй дроби:
![]()
"Делим" числитель
второй дроби, чтобы избавиться от суммы (![]() ):
):
![]()
Преобразуем множители к виду функционального преобразования Лапласа:



Воспользуемся формулами обратных преобразований Лапласа:
![]() ,
, ![]() ,
, ![]()
Получаем следующее выражение для переходной характеристики:

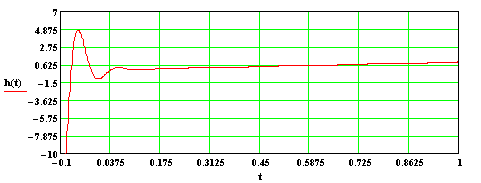
По графику переходной характеристики необходимо определить величину перерегулирования γ.
Установившееся значение выходного сигнала системы вычисляется следующим образом:
![]() ,
,
где ![]() -
передаточная характеристика системы в замкнутом состоянии.
-
передаточная характеристика системы в замкнутом состоянии.
![]()
![]()
Перерегулирование γ равно отношению максимального значения выходного сигнала в переходном процессе к установившемуся значению:
![]()
Определить динамическую ошибку при входном воздействии λ (t).
Динамической ошибкой называется ошибка в установившемся режиме работы системы при действии на неё нестационарного сигнала.
Значение динамической ошибки при входном воздействии λ (t) определяется по формуле:
![]()
где Ci - коэффициенты ошибки от воздействия λ (t), которые находятся по формулам:
![]() , при p=0,
, при p=0,![]()
![]() ,
,
где We - передаточная функция ошибки, которая вычисляется по формуле:
![]()


![]()
Найдем производную передаточной функции ошибки:
![]()
Подставив в производную значение p=0, получаем:
![]()
Найдём ![]() :
:
![]() ,
, ![]()
Подставив полученные значения коэффициентов и производных в формулу, получим:
![]()
![]()
![]()