Курсовая работа: Синтез системы автоматического регулирования фокусировки пятна
Министерство образования Российской Федерации
Рязанская государственная радиотехническая академия
Кафедра САПР вычислительных средств
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К курсовой работе по дисциплине
«Основы автоматики и системы автоматического управления»
На тему
Синтез системы автоматического регулирования
фокусировки пятна
:
Рязань
Рязанская государственная радиотехническая академия
Кафедра САПР вычислительных средств
ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ
По дисциплине «Основы автоматики и системы автоматического управления» студенту
Тема: Синтез системы автоматического регулирования фокусировки пятна (САРФ)
Срок представления работы к защите: ____________2002г.
Исходные данные для выполнения работы:
Измерение ошибки фокусировки производить по методу частичного перекрытия зрачка;
Вариант |
l, мкм | F |
ky |
Т, с |
dк, мм |
B, т |
Rк, Ом |
W, витков | m, г | m, г/сек | c, н/м |
| 1 | 8 | 150 | 3 |
10-4 |
10 | 1 | 2 | 50 | 10 | 30 | 200 |
Руководитель работы __ _______
Задание выдано ______________ 2002 г.
Задание принято к исполнению ______
Введение
В настоящее время оптические дисковые системы нашли множество применений. Возможность записи значительного объема информации и простота тиражирования делает оптический диск очень привлекательным. В сфере записи и хранения данных системы с прямой оптической записью информации стали штатными периферийными устройствами компьютеров.
Просто осуществляемое сканирование по плоской поверхности диска при считывании, обеспечивающее быстрый доступ к информации, важное качество таких систем. Дополнительным достоинством оптических дисков является отсутствие физического контакта между считывающей головкой и несущем информацию слоем, так как считывание осуществляется пучком света, сфокусированным на этом слое. Защитный прозрачный слой, покрывающий носитель информации, предохраняет мелкие детали от повреждений и затеняющих частичек.
Как и в обычной граммофонной записи, информация расположена по спирали, которая называется дорожкой. Дорожка представляет собой спиральный прерывистый пунктир из меток записи. Метки являются маленькими областями, имеющими оптический контраст с окружающей их зеркальной поверхностью, например черные элементы в виде черточек или продолговатые углубления (питы) на поверхности. Метки вызывают изменение отражения от диска вдоль дорожки. Оптическая считывающая головка, которая в данном случае заменяет механическую иглу граммофона, преобразует изменения отражения в электрический сигнал. Для этого объектив головки фокусирует лазерный луч в маленькое пятно на дорожке и направляет луч, отраженный от диска, на фотоприемник. Таким образом, сигнал с фотоприемника модулируется во времени в соответствии с метками на дорожке вращающегося диска.
В настоящее время оптические дисковые системы снабжены пятью системами автоматизированного регулирования, а именно:
– Вращения диска (САРВ);
– Тангенциального слежения (САРТ);
– Радиального слежения за дорожкой (САРД);
– Радиального перемещения каретки (САРРП);
– Вертикального слежения за фокусировкой (САРФ).
1. Описание работы САР
На рис.1. схематически показана САРФ
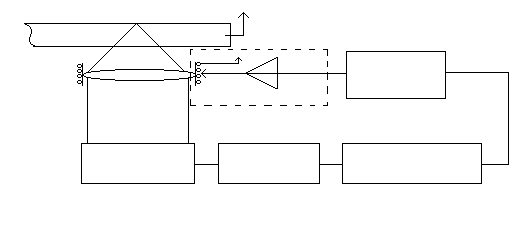
Рис.1. САРФ
Датчик положения обеспечивает сигнал в виде напряжения постоянного тока, приблизительно пропорциональный ошибке фокусировки. После усиления и коррекции этот сигнал преобразуется в ток, протекающий по катушке, находящейся в магнитном поле (местный электродвигатель), что вызывает появление вертикально направленной силы, приложенной к объективу. Он перемещается в направлении уменьшения ошибки. Из рисунка видно, что САРФ является системой с замкнутой петлей обратной связи.
Для работы такой системы требуется наличие биполярного сигнала ошибки фокусировки. Этот сигнал получают оптическими средствами. Большинство методов получения сигнала ошибки фокусировки основаны на том факте, что лазерный луч отражается диском точно в обратном направлении только в случае, когда фокус находится точно на поверхности диска. Если внести некоторую асимметрию в оптический путь отраженного луча, то появляется возможность выделять сигнал отклонения фокуса от поверхности диска. При этом диск не должен найти никакой информации специально для фокусировки. К наиболее широко используемым методам выделения сигнала ошибки фокусировки относится метод ножа Фуко, метод частичного перекрытия зрачка и астигматический метод.
Во всех методах при выделении и формировании сигналов ошибки высокочастотные составляющие сигнала с фотоприемника интереса не представляют. Сигнал с фотоприемника поступает на низкочастотный фильтр, который подавляет высокочастотные колебания, обусловленные питами или отверстиями. Можно сказать, что питы так быстро движутся перед объективом, что сливаются в единую дорожку усредненной промежуточной интенсивности.
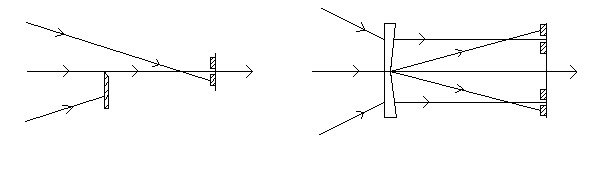
Рассмотрим работу датчика положения, использующего для получения сигнала ошибки метод частичного перекрытия зрачка. На рис.2 изображена схема метода.
D1
D2
D1
X Х
D2
H D3
D3
Рис.2. Метод частичного перекрытия зрачкас помощью непрозрачного экрана Н(а), и при замене его бипризмой (б).
В данном методе край непрозрачного экрана расположен вдали от точки фокуса отраженного пучка, а двух площадочный детектор в согласованном состоянии (фокус на дорожке диска) расположен точно в фокусе. В этой точке распределение света в пятне сложное, но с достаточной точностью можно считать, что оба детектора освещены равномерно. Однако уже на небольшом расстоянии X от фокуса становится допустимым геометрическое приближение и расфокусировка приводит к увеличению освещенности одной половины экрана относительно другой. Если в плоскости экрана расположить два детектора D1 и D2 (рис.2a), то сигнал ошибки фокусировки Uф будет равен:
Uф=UD1-UD2 ,
где: UD1, UD2 – сигналы, снимаемые с детекторов D1 и D2.
Сигнал ошибки фокусировки изменяется от максимального положительного до максимального отрицательного значения при перемещении фокуса. Это расстояние, измеренное на детекторе, соответствует двойному перемещению диска вследствии отражательного характера системы.
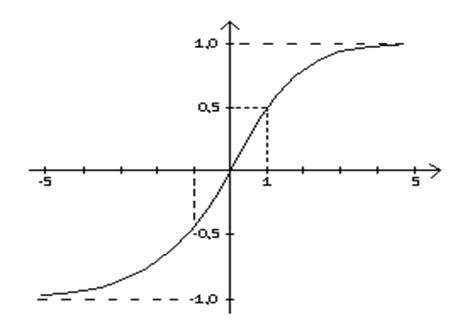
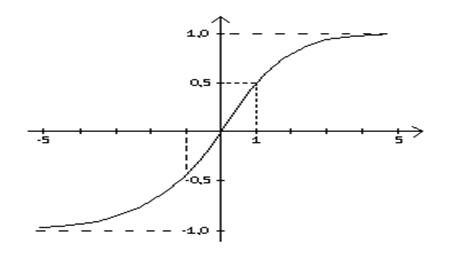
Для уменьшения чувствительности метода к расстройке элементов из-за температурных и механических деформаций вместо экрана обычно применяют бипризму и два двухплощадочных детектора вместо одного (рис.2б), что существенно сближает эту чувствительность. На рис.3. показан сигнал ошибки фокусировки, полученный по этому методу.
 UФ
UФ
х [мкм]
Рис.3. Характеристика сигнала расфокусировки, полученного методом частичного перекрытия зрачка
Вдоль оси X отложены значения величины расфокусировки пятна относительно оптического диска. По вертикальной оси -относительные значения сигнала Uф получаемого с двух пар детекторов по формуле:
UФ= ( UD1-UD2 )+( UD4-UD3)
1.1 Построение структурной схемы
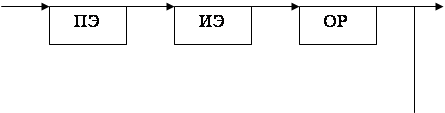
На рис.4 . показана общая структура САРФ.
 |
|||||
Рис.4
Где СЭ - сравнивающий элемент, который выделяет сигнал пропорциональный ошибке;
ПЭ - промежуточный элемент (электронная схема);
ИЭ - исполнительный элемент (двигатель);
ОР - объект регулирования (оптическая система).
На рис.5 . показана структурная схема САРФ.
 |
|||
Рис.5
где
Wсэ (S) – передаточная функция СЭ;
Wпэ (S) – передаточная функция ПЭ;
Wмэ (S) – передаточная функция ИЭ;
Wор (S) – передаточная функция ОР.
1.2 Расчётная часть
1.2.1 Определение параметров датчика положения
При проектировании систем, использующих такой метод определения ошибки расфокусировки необходима дополнительная проверка максимального отклонения от фокуса. Для проведенной характеристики должно выполнятся условие |XMAX| < 3мкм. Таким образом, при использовании метода определения ошибки фокусировки, датчик положения можно условно представить в виде схемы, приведенной на рис.6., состоящей из суммирующего усилителя с коэффициентом передачи КУ и фильтра низких частот.
|
D1
D2 R UДП КУ
D3 U∑ С
D4
|
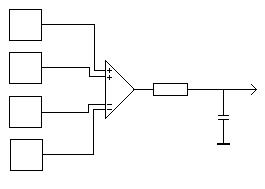
Рис.6. Схема датчика положения.
Уравнения, описывающие эту схему при неограниченной мощности усилителя и бесконечно большом входном сопротивлении следующего каскада, имеют вид:
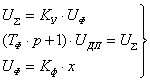
Где UФ - сигнал расфокусировки;
RУ - коэффициент передачи суммирующего усилителя;
UДП - сигнал на выходе датчика положения;
![]() - постоянная времени фильтра
низких частот;
- постоянная времени фильтра
низких частот;
![]() - оператор дифференцирования;
- оператор дифференцирования;
x – сигнал ошибки фокусировки;
kФ – крутизна характеристики сигнала расфокусировки.
На рис.7. показана структурная схема датчика положения.
X UФ Uå UДП
Рис.7
Значение kФ определяется путем линеаризации характеристики в точке начала координат, т.е.
 Uф
Uф
X max
UФ = 1;
x = 2 * 10 –6 (м)
kФ = UФ / x = 0,5 * 10 6
TФ - скорость потока данных, считываемых с дорожки диска может быть выбрана по выражению
![]() >(3
>(3![]() 5)
5)![]()
Где λ – максимальное расстояние между двумя переходами от пита к ленду в канальном ходе на дорожке диска ;
f – скорость считывания канального хода (потока данных) бит/с.
![]() =(3
=(3![]() 5)
5)![]() = p * 8 / 2*p*
14*150000 = 10 –6
= p * 8 / 2*p*
14*150000 = 10 –6
Значение передаточной функции датчика положения определяется по формуле
Wдп (S) = Ky * Kф / (Тф S + 1) = 3 * 2*10 6 / (10 – 6 * S + 1)
1.2.2 Определение параметров двигателя
Сигнал выхода усилителя мощности поступает на исполнительный двигатель, как правило линейный электродвигатель (ЛЭД), работающий по принципу громкоговорителя. Составными частями такого двигателя являются: катушка, постоянный магнит и, возможно, магнитопровод из магнитномягкого железа.
Пригодные к применению конструкции ЛЭД могут быть разделены на две основные группы с подвижной катушкой и с подвижным магнитом.
Альтернативным решением может быть конструкция с подвижным постоянным магнитом и неподвижной катушкой. В этом случае отвод тепла от катушки не является серьезной проблемой (низкое RT) и максимально допустимая температура катушки Ткат max может быть выше, так как она изолирована от объектива. Но развиваемая ЛЭД сила будет меньше из-за ослабления магнитного поля (низкое В), поскольку объем магнита меньше. Увеличение же магнита нежелательно, так как приводит к возрастанию массы подвижной части, что ухудшает динамические свойства САРФ.
Поэтому в реальных конструкциях применяется ЛЭД с подвижной катушкой.
Поскольку оба типа ЛЭД являются одинаковыми по принципу действия и различаются лишь подвижностью составляющих их частей, уравнения, описывающие их поведение можно представить в виде
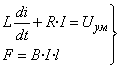
где: L – индуктивность катушки;
R=Rк+Rум - сопротивление катушки и внутреннее сопротивление усилителя мощности;
I - ток катушки;
В – магнитная индукция;
l – длина проводника катушки в магнитном поле;
F – сила действующая на катушку;
UУМ – напряжение на выходе усилителя мощности,
или в операторной форме
(Т·Р+1) F=LлэдUум
где ![]() - постоянная времени
ЛЭД;
- постоянная времени
ЛЭД;
![]() - коэффициент передачи ЛЭД;
- коэффициент передачи ЛЭД;
l = π dk W;
W – число витков катушки ЛЭД.
На рис.8. показана структурная схема двигателя.
 |
Рис.8.
Определяем длину проводника катушки в магнитном поле
l = π* dk * W = π * 0,01 * 50 = 1,571 (м)
Определяем коэффициент передачи ЛЭД:
![]() = 1* 1, 571 / 2 = 0,785 (м /Ом)
= 1* 1, 571 / 2 = 0,785 (м /Ом)
Значение передаточной функции ЛЭД находим по формуле
Wдв (S) = Kлэд / (Т*S +1) = 0,785 / ( 10 – 4 * S +1)
1.2.3 Определение параметров объекта регулирования
Основная цель, стоящая при разработке подвески, обеспечить движение головки только по жестко заданным направлениям. Подвески могут быть с помощью линейных подшипников механического или электромагнитного типа и пружинных гибких направляющих. В первом случае перемещение в направлении регулирования ничем не ограничивается, а в перпендикулярных направлениях предотвращается путем выбора соответствующих подшипников с минимально возможными допусками у механических и максимальной жесткостью у электромагнитных. Тогда с учетом демпфирования в подвесе и диссинации энергии в катушке, уравнения движения подвижной части имеют вид
![]()
Так как головка имеет пружинную подвеску, то ее движение описывается уравнением
![]()
![]()
где с - жесткость пружин,
![]() - коэффициент вязкого трения,
- коэффициент вязкого трения,
или в операторной форме:
![]()
где ![]() - постоянная времени
пружинной подвески;
- постоянная времени
пружинной подвески;
![]() - относительный коэффициент затухания;
- относительный коэффициент затухания;
![]() .
.
Плоские параллельные пружины, использующиеся в подвеске для системы фокусировки, должны иметь очень высокую жесткость при изгибе в направлении фокусирования жесткость должна быть мала.
Определяем постоянную пружинной подвески:
![]() =
=![]() = 7,071*10 - 3
= 7,071*10 - 3
Определяем относительный коэффициент затухания
![]() =
= ![]() = 0,011
= 0,011
Определяем коэффициент К:
К= 1/с = 1/200 = 0,005
Находим передаточную функцию объекта регулирования:
Wор (S) = Kор / ![]() = 0,005 / 0,00005*S2 + 0,00015*S +1
= 0,005 / 0,00005*S2 + 0,00015*S +1
1.2.4 Определение передаточных функций разомкнутой и замкнутой систем
Находим передаточную функцию разомкнутой системы по формуле:
Wразомк. (S) = Wдп (S) * Wдв (S) * Wор (S) =
=(1,5*106*0,785*0,005)/ (10-6*S+1)(104*S+1)(0,00005*S2+10-4*S+1)=
= 5887,5/(0,00005*S2+10-4*S+1)
Находим передаточную функцию замкнутой системы по формуле:
Wзамк. (S) = Wразомк. (S) / (1 – Wразомк. (S)) =
= 5887,5/(0,00005*S2+10-4*S – 5886,5)
2. Синтез корректирующего устройства
При синтезе корректирующего устройства нужно исходить из того, что объект регулирования - неизменная часть, а синтезу подлежат корректирующие устройства или регулятор - изменяемая часть системы.
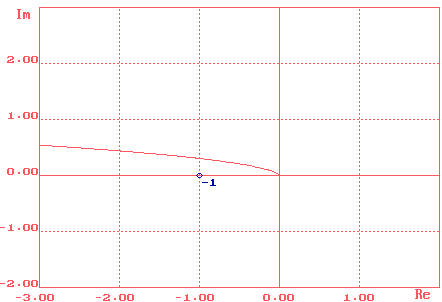
Рис.9. Годограф нескорректированной системы
При отсутствии корректирующего устройства КУ, то есть при Wку(s)=1, получены следующие характеристики:
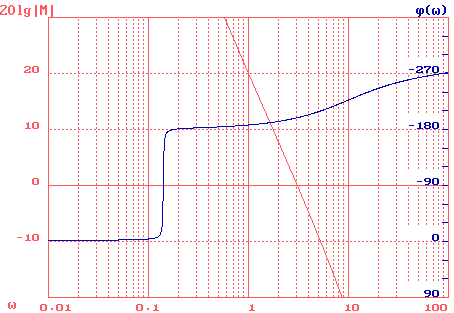
Рис.10. ЛАЧХ и ЛФЧХ нескорректированной системы
Приведённые выше характеристики были получены при общем коэффициенте усиления разомкнутой системы K, при котором должна обеспечиваться заданная точность xmax.
Так как данная система статическая , то общий коэффициент усиления разомкнутой системы определяется из соотношения:
![]()
При подстановке числовых значений получаем, что
К = 499
Об устойчивости системы можно судить по ее годографу (АФХ). В устойчивой системе кривая годографа не должна охватывать точку с координатами (-j, 0).
В данном случае полученная система неустойчива и поэтому производим расчет корректирующего устройства, используя частотный метод синтеза, основанный на построении желаемой ЛАХ.
После ввода корректирующего устройства были получены следующие характеристики:
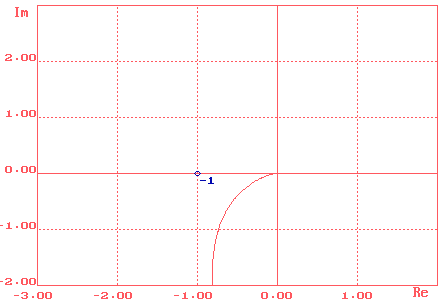
Рис.11. Годограф с КУ
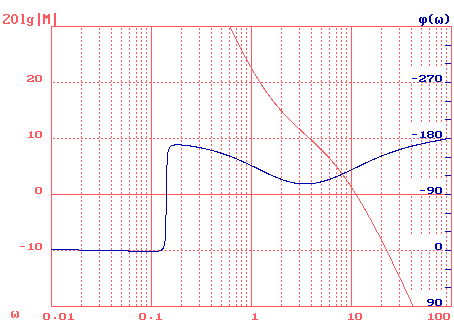
Рис.12. ЛАЧХ и ЛФЧХ с КУ
При построении характеристик (смотри рис.12) было произведено масштабирование по оси частот, то есть частота была уменьшена на три порядка (в 1000 раз).
Значит реальное корректирующее устройство имеет следующие параметры
w0 = 3090 (1/с).
 0,0006054 (сек.)
0,0006054 (сек.)
![]() = 0,0001009 (сек..)
= 0,0001009 (сек..)
запишем передаточную функцию реального КУ:
![]()
Определяем запас устойчивости по фазе и по амплитуде (см. рис.12.):
запас устойчивости по фазе на частоте среза c равен 57°, запас устойчивости по амплитуде равен , определяемый на частоте где j(w)=-180°, 7 дб.
При задающем воздействии, равным единице (f (t) =1), процесс регулирования выглядит следующим образом (см. рис.13.).
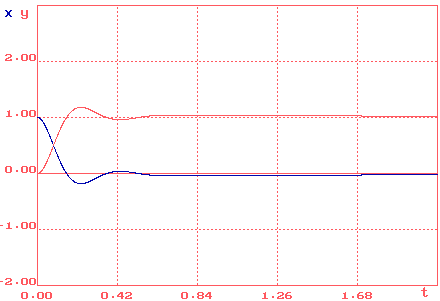
Рис.13. Процесс регулирования.
3. Заключение
В данной курсовой работе были выполнены следующие задачи:
· Построение характеристик (годограф, ЛАЧХ и ЛФЧХ) разомкнутой системы без корректирующего устройства и с корректирующим устройством;
· Расчёт передаточных функций отдельных звеньев и передаточных функций замкнутой и разомкнутой систем;
· Расчёт общего коэффициента усиления разомкнутой системы К;
· Расчёт корректирующего устройства, определение постоянных времени: Т и t ;
По результатам курсовой работы можно сделать следующие выводы:
· При введении корректирующего устройства разомкнутая система становится устойчивой, то есть годограф не охватывает точку с координатами (-j ; 0);
· Запас устойчивости по фазе и по амплитуде лежат в пределах нормы;
· Процесс регулирования при входном синусоидальном воздействии при заданных параметрах не возможен, но возможен при
g max = 1, x max = 2 мкм, w max = 20 (1/сек.)
4. Список литературы
1. Теория автоматического управления / Под ред. А.А.Воронова. - М. : Высшая школа. -1977.-Ч.I.-304с.
2. Бесекерский В.А., Попов Е.П. Теория автоматического регулирования. - М. : Наука, 1974.
3. Егоров К.В. Основы теории автоматического управления. – М. : Энергия 1967