Реферат: Методы расчета БИХ-фильтров
Введение
Цифровые системы - это системы с цифровыми сигналами на входе и выходе. Их ядром обычно является ЦВМ. Человечество создало мало объектов, имеющих цифровую природу, поэтому общий термин цифровая система применяется редко. Гораздо чаще встречаются термины цифровой фильтр или система цифрового управления, которые ярко отражают основную область применения этих систем. Нередко систему цифрового управления, так же называют цифровым фильтром. Итак, цифровой фильтр - это дискретно-временная система, выходной сигнал которой является модифицированной версией входного сигнала.
Фильтры являются основой для большинства приложений обработки сигналов. Типичное назначение - это извлечение или вырезка области спектра входного сигнала или определенной частоты. Используемые для кондиционирования сигналов фильтры нередко называются частотно селектирующими, поскольку обычно разрабатываются на основе требований к частотной характеристике.
Методы расчета БИХ-фильтров
Расчет БИХ-фильтров можно вести в частотной и временной областях. При расчете в частотной области используется синтез по аналоговому и цифровому прототипам. Численные методы расчета разработаны для применения в частотной и временной областях.
Синтез по аналоговому прототипу основан на преобразовании p-плоскости в z-плоскость, а характеристик и параметров аналоговых фильтров в соответствующие характеристики и параметры цифровых фильтров. Передаточная функция аналогового фильтра на p-плоскости в общем виде может быть записана так
 . (1)
. (1)
Для перехода к функции ![]() и разностному уравнению
ЦФ существуют следующие четыре метода.
и разностному уравнению
ЦФ существуют следующие четыре метода.
Метод 1. Отображение дифференциалов. Это наиболее простой метод, сущность которого заключается в замене дифференциалов на конечные разности. В операторном уравнении (1), если дифференциалы заменяются прямыми разностями, то
 или
или ![]() ,
,
а если обратными, то
 или
или 
Недостатком метода является неполное соответствие частотно-избирательных свойств ЦФ свойствам аналогового прототипа. Кроме того, при использовании прямых разностей устойчивый аналоговый фильтр - прототип отображается в неустойчивый ЦФ. Поэтому, несмотря на простоту, применять этот метод не рекомендуется.
Метод 2. Инвариантное преобразование импульсной характеристики (стандартное Z-преобразование). Сущность метода заключается в расчете импульсной характеристики (ИХ) ЦФ по аналоговому прототипу и вычислении системной (передаточной) функции ЦФ.
Достоинством данного метода является
подобие импульсных характеристик ЦФ и аналогового прототипа; простота.
Недостатком же является наличие эффекта наложения частотных характеристик ЦФ,
если полоса пропускания аналогового прототипа превышает ![]() . Поэтому точность расчетов
ЦФ по данному методу тем выше, чем меньше отношение
. Поэтому точность расчетов
ЦФ по данному методу тем выше, чем меньше отношение
![]()
где ![]() - верхняя частота полосы
пропускания ЦФ;
- верхняя частота полосы
пропускания ЦФ; ![]() - частота дискретизации.
- частота дискретизации.
Метод 3. Согласованное Z-преобразование. Полюсы и нули аналогового прототипа на p-плоскости отображаются в полюсы и нули ЦФ на z-плоскости по правилу
![]()
Для реализации этого метода передаточную функцию аналогового прототипа представляют в виде произведения сомножителей
где ![]() ,
, ![]() - действительные или
комплексно-сопряженные коэффициенты. Метод согласованного Z-преобразования не применим, если
передаточная функция аналогового прототипа имеет только полюсы (нули
расположены в бесконечности). Для устранения этого недостатка при расчетах
фильтров с нулями в бесконечности рекомендуется вводить полюс того же порядка,
что и нуль, в точке
- действительные или
комплексно-сопряженные коэффициенты. Метод согласованного Z-преобразования не применим, если
передаточная функция аналогового прототипа имеет только полюсы (нули
расположены в бесконечности). Для устранения этого недостатка при расчетах
фильтров с нулями в бесконечности рекомендуется вводить полюс того же порядка,
что и нуль, в точке ![]() .
.
Метод 4. Билинейное (дробно-линейное)
Z-преобразование. При отображении p-плоскости в z-плоскость вся мнимая ось ![]() ,
, ![]() отображается в единичную
окружность. Для этого необходимо выбирать нелинейную монотонную функцию
частоты. Эта функция должна изменяться в пределах от
отображается в единичную
окружность. Для этого необходимо выбирать нелинейную монотонную функцию
частоты. Эта функция должна изменяться в пределах от ![]() до
до ![]() на оси частот дискретизации при
изменении
на оси частот дискретизации при
изменении ![]() от
от
![]() до
до ![]() . В качестве
такой функции комплексных частот можно выбрать гиперболический тангенс
. В качестве
такой функции комплексных частот можно выбрать гиперболический тангенс
![]() или
или ![]() , (2)
, (2)
которому при ![]() соответствует обычный тангенс
соответствует обычный тангенс
![]() .
.
Гиперболический тангенс в выражении (2) можно представить следующим образом
 . (3)
. (3)
Таким образом, комплексная плоскость p преобразуется в комплексную z-плоскость заменой переменных (3).
С помощью билинейных Z-преобразований можно от аналогового ФНЧ прототипа перейти к ЦФ нижних частот (НЧ), верхних частот (ВЧ), полосовому, режекторному, гребенчатому и др.
Билинейное Z-преобразование обладает следующими достоинствами: во-первых, физически реализуемый и устойчивый аналоговый фильтр отображается в физически реализуемый и устойчивый ЦФ: во-вторых, отсутствуют проблемы, связанные с наложениями: в-третьих, нелинейность шкалы частот ЦФ, преобразованного из прототипа, можно учесть для широкого класса фильтров.
Недостатком этого метода является не совпадение импульсной и фазовой характеристик рассчитанного прототипа, поэтому необходимо вводить корректоры и усложнять конструкцию ЦФ. Тем не менее метод билинейного Z-преобразования является самым распространенным аналитическим методом расчета ЦФ.
Для синтеза БИХ ЦФ по цифровому
прототипу используются преобразования ЦФ НЧ с безразмерной частотой среза ![]() в ЦФ НЧ с
другой частотой среза, ЦФ ВЧ, полосовой, режекторный или гребенчатый фильтры. Методика
расчета по цифровому прототипу проще, чем методика расчета по аналоговому
прототипу, так как в ней отсутствует этап перехода от аналогового фильтра -
прототипа к ЦФ.
в ЦФ НЧ с
другой частотой среза, ЦФ ВЧ, полосовой, режекторный или гребенчатый фильтры. Методика
расчета по цифровому прототипу проще, чем методика расчета по аналоговому
прототипу, так как в ней отсутствует этап перехода от аналогового фильтра -
прототипа к ЦФ.
Применение методов оптимизации для расчета БИХ-фильтров
В последние годы широкое распространение получил другой класс методов расчета БИХ-фильтров, называемых методами оптимизации. Отличительной чертой этих методов является то, что система уравнений, составленная относительно коэффициентов фильтра, не может быть решена в явной форме. Поэтому для нахождения коэффициентов приходится использовать численные методы оптимизации, минимизирующие, согласно выбранному критерию, некоторую ошибку.
В качестве такого критерия используется критерий минимума среднеквадратической ошибки. При этом целевая функция задачи имеет вид

где ![]() - (
- (![]() )-мерный вектор искомых коэффициентов,
)-мерный вектор искомых коэффициентов,
![]() -
получаемая амплитудная характеристика фильтра,
-
получаемая амплитудная характеристика фильтра, ![]() - заданная амплитудная
характеристика фильтра,
- заданная амплитудная
характеристика фильтра, ![]() ,
, ![]() - дискретный ряд частот, на
которых вычисляются отклонения получаемой и заданной характеристик фильтра.
- дискретный ряд частот, на
которых вычисляются отклонения получаемой и заданной характеристик фильтра.
Минимизация функции ![]() сводится к нахождению
оптимального значения параметрического вектора весовых коэффициентов фильтра
сводится к нахождению
оптимального значения параметрического вектора весовых коэффициентов фильтра ![]() . Так как
функция
. Так как
функция ![]() является
нелинейной, для ее минимизации необходимо использовать эффективные методы
оптимизации.
является
нелинейной, для ее минимизации необходимо использовать эффективные методы
оптимизации.
При использовании методов оптимизации
учитывается поведение только амплитудной характеристики, поэтому некоторые
полюсы или нули после завершения итераций могут оказаться за пределами
единичного круга. В этом случае можно прежде всего заменить полюс с полярными
координатами ![]() , оказавшийся вне единичного
круга, на полюс с координатами
, оказавшийся вне единичного
круга, на полюс с координатами ![]() , находящийся внутри единичного
круга. Амплитудная характеристика фильтра при такой замене остается неизменной,
так как полюс заменяется своим зеркальным отображением. После того, как все
полюсы оказываются внутри единичного круга, появляется возможность с помощью
дополнительного анализа еще больше оптимизировать квадрат ошибки. Такая
ситуация возникает достаточно часто, и в этих случаях оптимизация должна производиться
двумя этапами:
, находящийся внутри единичного
круга. Амплитудная характеристика фильтра при такой замене остается неизменной,
так как полюс заменяется своим зеркальным отображением. После того, как все
полюсы оказываются внутри единичного круга, появляется возможность с помощью
дополнительного анализа еще больше оптимизировать квадрат ошибки. Такая
ситуация возникает достаточно часто, и в этих случаях оптимизация должна производиться
двумя этапами:
1.
Использование
программы оптимизации для минимизации функции ![]() без каких-либо ограничений на
расположение нулей и полюсов.
без каких-либо ограничений на
расположение нулей и полюсов.
2.
После завершения
итераций инвертирование всех полюсов и нулей, оказавшихся вне единичного круга.
После этого продолжение оптимизации для нахождения нового минимума ![]() .
.
Расчет БИХ фильтров во временной области
Наряду с методами расчета фильтров, обладающих заданными частотными характеристиками, существуют методы расчета фильтров с заданными импульсными характеристиками. Пусть z-преобразование импульсной характеристики h(k) фильтра равно
 (1)
(1)
причем требуется, чтобы импульсная характеристика аппроксимировала заданную последовательность g(k) в диапазоне 0 ≤ k ≤ Р-1. Используя различные предположения, Баррас и Парке, а также Брофи и Салазар и другие авторы показали, что можно найти такой набор коэффициентов аi и bi что
![]() (2)
(2)
будет минимальной. Здесь w(k) — положительная весовая функция последовательности ошибки. Поскольку характеристика h(k) нелинейно зависит от параметров фильтра {аi} и {bi}, в общем случае задача минимизации е может быть решена только методом последовательных приближений. В частном случае, когда Р = n+m-1, искомые параметры фильтра, минимизирующие величину , можно найти, решив систему из (n+m) линейных уравнений. Рассмотрим этот метод подробнее. Для этого (считая, что а0= b0=1) представим импульсную характеристику фильтра в виде
![]() (3)
(3)
![]() (4)
(4)
В предположении, что g(k)= h(k) при k = 1, 2, . . ., m, решим систему уравнений вида (4.141) относительно коэффициентов ai, что дает g(k) = h(k) при k = m + 1, m + 2, . . ., m + n. Решив систему уравнений вида (4.140) при определенных значениях ai, найдем такие значения коэффициентов bi, для которых g(k} = h(k) при k = 1, 2, . . ., m. Эта процедура сводится к приравниванию первых (n+m+1) членов степенного разложения передаточной функции (1) z-преобразованию заданной импульсной характеристики фильтра g(k), усеченному за (n+m)-м членом. Такой метод аппроксимации степенных рядов рациональной функцией часто называют аппроксимацией Падэ. При аппроксимации заданной импульсной характеристики цифрового фильтра путем воспроизведения ее первых (n+m+1) отсчетов предполагается, что в целом импульсная и частотная характеристики получаемого в результате аппроксимации фильтра не будут существенно отличаться от заданных характеристик. Однако простого метода для нахождения хотя бы даже приближенно оценок отклонений любой из этих характеристик пока не существует. Приведем несколько конкретных примеров использования Лого метода для расчета КИХ-фильтров (примеры взяты из статьи Брофи и Салазара).
На фиг. 6 и 7 представлены характеристики двух фильтров, рассчитанных с использованием аппроксимации Падэ, которые предназначены для работы в системах передачи данных. Кривая А на фиг. 6 представляет собой требуемую амплитудную характеристику полосового фильтра. Частота дискретизации в данном и последующем примерах равна 7200 Гц. Этот фильтр должен обладать следующими характеристиками: ослабление на 3 дБ на частотах 200 и 3200 Гц, размах пульсаций в полосе пропускания менее 0,25 дБ, линейные фазовые характеристики в полосе пропускания и крутизна спада в полосе непропускания не менее 12 дБ на октаву. Кривой Б представлена амплитудная характеристика фильтра 24-го порядка, рассчитанного методом аппроксимации Падэ. Наибольшая абсолютная величина ошибки отсчетов импульсной характеристики фильтра равна 0,0018. Фазовая характеристика рассчитанного фильтра приведена на фиг. 6 внизу.
Аналогичные кривые для полосового фильтра 10-го порядка, рассчитанного методом аппроксимации амплитудной характеристики в предположении, что она имеет спады косинусоидальной формы, представлены на фиг. 7.
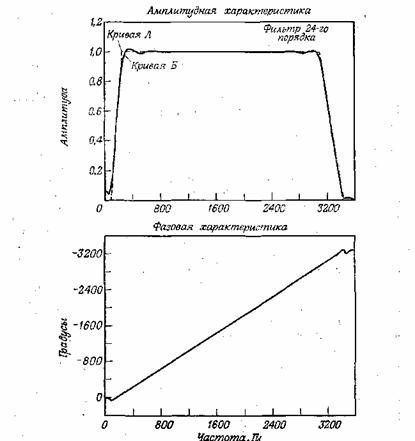
Фиг. 6. Расчет полосового фильтра с использованием аппроксимации методом Падэ (по Брофи и Салазару)
Необходимо учитывать, что, так как при аппроксимации методом Падэ фильтр рассчитывается только во временной области, получающаяся при этом аппроксимация амплитудной характеристики в частотной области, как правило, не обеспечивает в полосе непропускания ослабления, превышающего 40 дБ. Однако коэффициенты фильтра, найденные этим методом, часто можно использовать в качестве начальных значений при расчете БИХ-фильтров, обладающих заданными частотными свойствами, более сложными методами оптимизации.
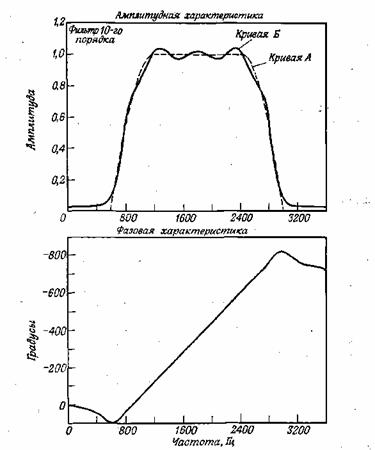
Фиг. 7. Расчет полосового фильтра с использованием аппроксимации методом Падэ (по Брофи и Салазару)
Список литературы
1. Балашов Е.П. и др. Микро- и мини-ЭВМ / Е.П. Балашов, В.Л. Григорьев, Г.А. Петров: Учебное пособие для вузов. – Л.: Энергоатомиздат. Ленингр. отд-ние, 1984
2. Калабеков Б.А. Микропоцессоры и их применение в системах передачи и обработки сигналов: Учеб. пособие для вузов. – М.: Радио и связь, 1988.
3. Микропроцессорный комплект К1810: Структура, прграммирование, применение: Справочная книга/ Ю.М. Казаринов, В.Н. Номоконов, Г.С. Подклетнов, Ф.В. Филиппов; Под ред. Ю.М. Казаринова.- М.: Высш. шк., 1900.
4. Микропроцессоры: системы программирования и отладки / В.А. Мясников, М.Б. Игнатьев, А.А. Кочкин, Ю.Е. Шейнин; Под ред. В.А. Мясникова, М.Б. Игнатьева. – М.: Энергоатомиздат, 1985.