Курсовая работа: Расчет пути и времени обгона
Исходные данные для расчёта
1 Расчёт времени и пути завершённого обгона
1.1 Расчёт пути и времени обгона с постоянной скоростью
1.2 Расчёт пути и времени обгона с возрастающей скоростью
2 Расчёт времени и пути незавершённого обгона
2.1 Первый этап незавершённого обгона
2.2 Второй этап незавершённого обгона
2.3 Третий этап незавершённого обгона
Список использованных источников
Приложения
Исходные данные для расчёта
V1,км/ч
V2,км/ч
L2,м
f0, м2
F,м2
k, ![]()
Технические характеристики:
Тип платформы.………….бортовой
Количество дверей……….2
Число мест для сиденья…2
Колёсная формула……![]()
Габаритные размеры, мм:
длина![]() ширина
ширина![]() высота (по кабине)…6675
высота (по кабине)…6675![]() 2510
2510![]() 2400
2400
Размеры грузовой платформы (внутр.)
длина![]() ширина
ширина![]() высота……………..-
высота……………..-![]() -
-![]() -
-
Колея передних(задних) колес………1800(1850)
Дорожный просвет, мм …………...……..-
Колесная база, мм…………………….3800
Масса снаряженного автомобиля, кг 4300
Полная масса, кг……………..............10525
Масса допустимая прицепа, кг...………8000
Грузоподъемность, кг……...………….2000
Двигатель (модель/тип)
Компоновочная схема…...….ЗИЛ-130/Карбюраторный
Рабочий объём двигателя, л…….2,445
Мощность двигателя, кВт (л.с.)…110(150)
Крутящий момент, Нм…………...410
Трансмиссия:
привод…………………………….задний
коробка передач……..……..…….мех. пятиступенчатая
Максимальная скорость, км/ч….90
Время разгона до скорости 60 км/ч, с……...-
Расход топлива на 100 км пути: при скорости 60 км/ч, л
(по ГОСТ 20306-90) ……….……………...29
Шины……………..…………..……………260R508
1. Расчёт времени и пути завершённого обгона
|
|
Расчёт пути и времени обгона с постоянной скоростью производится по формулам (1.4) и (1.5).
Расстояние, необходимое для безопасного обгона, называемое путь обгона, Sоб1, м, может быть определено по формуле:
![]() (1.1)
(1.1)
или
Sоб1=V1tоб1 (1.2)
где: D1 и D2 - дистанции безопасности между обгоняющим и обгоняемым автомобилями в начале и конце обгона, м;
L1 и L2 - габаритные длины обгоняющего и обгоняемого автомобилей, м;
S2, - путь обгоняемого автомобиля, м;
V1 - скорость обгоняющего автомобиля, м/с;
tоб1 - время обгона с постоянной скоростью, с.
Путь обгоняемого автомобиля:
![]() (1.3)
(1.3)
![]() м.
м.
где V2 - скорость обгоняемого автомобиля, м/с.
Следовательно, путь обгона можно определить по следующей зависимости:
![]() (1.4)
(1.4)
![]() м.
м.
Время обгона:
![]() (1.5)
(1.5)
![]() с.
с.
Величины дистанций безопасности D1 и D2 в большой степени зависят от дорожных условий, типа автомобиля, опыта и квалификации водителя. Точный их расчёт невозможен, поэтому правилами дорожного движения предусматривается, что дистанция между автомобилями выбирается водителем, который учитывает не только возможность экстренного торможения переднего автомобиля, но и вероятность его в данной дорожной обстановке. При временном интервале между следующими один за другим автомобилями менее 9... 10 с на величину дистанции влияет также автомобиля. Наименьшие дистанции выдерживают при следовании легкового автомобиля за легковым, а максимальные - при движении грузового автомобиля за легковым. Характер зависимости дистанции от скорости одинаков для взаимодействующих автомобилей всех типов.
На основе накопленных экспериментальных данных первая дистанция безопасности может быть представлена в виде функции скорости обгоняющего автомобиля:
![]() (1.6)
(1.6)
![]() м.
м.
а вторая - в виде функции скорости обгоняемого автомобиля:
|
|
![]() (1.7)
(1.7)
![]() м.
м.
где ![]() и
и ![]() - эмпирические коэффициенты, зависящие от типа
обгоняемого автомобиля, их значения приведены в таблице 1.1.
- эмпирические коэффициенты, зависящие от типа
обгоняемого автомобиля, их значения приведены в таблице 1.1.
Вторая дистанция безопасности короче первой, так как водитель обгоняющего автомобиля стремиться быстрее возвратиться на свою полосу движения и иногда «срезает угол». Кроме того, скорость V1 обгоняющего автомобиля больше скорости V2 обгоняемого, поэтому если в момент завершения обгона дистанция между автомобилями и окажется короче допустимой, то она очень быстро увеличится. После проведённых расчётов необходимо построить график и схему обгона (рисунок 1.1), считая движение обоих автомобилей равномерным, и соответствующим зависимости S=S(t). Эта зависимость представляет собой прямые линии 1 и 2 соответственно для обгоняющего и обгоняемого автомобилей.
В начале обгона расстояние между передними частями обгоняющего и обгоняемого автомобилей равно D1+L2. Точка А пересечения прямых 1 и 2 характеризует момент обгона, в который оба автомобиля поравнялись (время tA)после чего обгоняющий автомобиль начинает выходить вперед. Чтобы определить минимально необходимые время и путь обгона, нужно найти на графике такие две точки В и С на линиях 1 и 2, расстояние между которыми по горизонтали было бы равно сумме D1+L2. Тогда абсцисса точки В определит путь обгона, а ордината - время обгона.
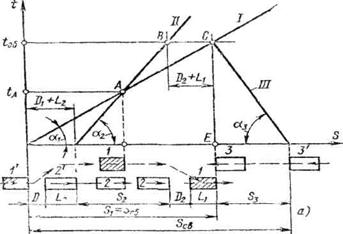
Рисунок 1.1 - Характеристики обгона при равномерном движении обгоняющего и обгоняемого автомобилей.
Определяем минимальное расстояние Sсв1, которое должно быть свободным перед обгоняющим автомобилем в начале обгона:
 (1.8)
(1.8)
![]() м.
м.
или с учётом (1.4):
![]() (1.9)
(1.9)
где Sз и V3 - путь и скорость встречного автомобиля, м/с.
Скорость встречного автомобиля в действительных условиях движения практически невозможно определить с высокой степенью точности и водитель, как правило, определяет её на основе своего опыта интуитивным путём. Для расчётов же примем следующую её зависимость от скорости обгоняющего автомобиля:
![]() (1.10)
(1.10)
![]() м/c
м/c
После проведения расчётов и построения на их основе соответствующих зависимостей необходимо проанализировать, какие факторы влияют на путь и время обгона, а также условия движения, в которых возможен и практикуется такой маневр.
1.2 Расчёт пути и времени обгона с возрастающей скоростью
Обгон с возрастающей скоростью характерен при высокой интенсивности движения при движении сплошным потоком. В этих условиях быстроходный автомобиль, догнав медленно движущийся автомобиль, уменьшает скорость, и некоторое время движется позади него с той же скоростью. Водитель заднего автомобиля внимательно следит за потоком и при появлении перед обгоняемым автомобилем достаточного свободного расстояния начинает обгон, сочетая его с разгоном. Для того чтобы путь и время обгона были минимальными, интенсивность разгона должна быть максимально возможной.
Для расчета пути и времени обгона с возрастающей скоростью необходимо вначале построить график интенсивности разгона, характеризующий зависимость между путем и временем движения обгоняющего автомобиля при максимально возможном ускоренном движении.
Для построения указанного графика нужно предварительно произвести расчёт динамической характеристики (зависимость динамического фактора от скорости движения), а затем определить зависимость ускорения обгоняющего автомобиля от скорости движения V1.
Динамический фактор определяется по формуле:
 , (1.11)
, (1.11)
![]()
где Рm- сила тяги, Н;
Рв - сила сопротивления воздуха, Н;
Ga - вес автомобиля, Н (Ga = gma);
Ме - крутящий момент двигателя, Н-м;
Ик - передаточное число коробки передач (для каждой i-ой передачи имеет своё значение);
И0 - передаточное числа главной передачи;
![]() - механический коэффициент
полезного действия трансмиссии;
- механический коэффициент
полезного действия трансмиссии;
rк - радиус колеса, м;
к - коэффициент обтекаемости, Н-с2/м4;
F- лобовая площадь, м2;
Va - скорость автомобиля, м/с.
Эффективный крутящий момент двигателя определяется по следующей зависимости:
 (1.12)
(1.12)

где Nmax - максимальная мощность двигателя, кВт;
а, b, с - эмпирические коэффициенты (для бензиновых двигателей a=0,8, b=1, с=0,9; для дизельных а=0,53; 6=1,56; с=1,05);
ne - частота вращения двигателя при расчётной скорости на соответствующей ей передаче, мин" ;
nn - частота вращения, соответствующая максимальной мощности, мин-1 .
Обороты, на которых работает двигатель, ne, мин-1 , следует задавать для расчётов в диапазоне [0,1nn;nn], принимая соответствующий шаг для 8... 10 значений, при выполнении обязательного условия nemin > 600 мин-1.
Скорость движения автомобиля рассчитываем по выражению:
![]() (1.13)
(1.13)
Таблица 1.2 - Значения коэффициента полезного действия для различных трансмиссий
![]()
Значения коэффициента
полезного действия, ![]() принимаются по таблице 1.2.
принимаются по таблице 1.2.
| Тип транспортного средства | Значение коэф-та |
| Легковые | 0,92-0,9 |
| Двухосные грузовые и автобусы с одинарной главной передачей | 0,90-0,88 |
| Двухосные грузовые и автобусы с двойной главной передачей, а также автомобили повышенной проходимости (4x4) | 0,88-0,85 |
| Трехосные грузовые и автобусы (6x4) | 0,86-0,83 |
| Грузовые (6x6) | 0,85-0,83 |
Если расчёт ведется для автопоезда, следует учитывать, что динамический фактор автопоезда корректируется с учётом массы прицепа:
![]() , (1.14)
, (1.14)
где mа- полная масса автомобиля-тягача, кг;
mпр- полная масса прицепа, кг;
n-количество прицепов.
Ускорение автомобиля рассчитывается по формуле:
![]() , (1.15)
, (1.15)
![]()
где ji - ускорение автомобиля на i-й передаче при скорости движения V м/с2;
Di - динамический фактор на i-й передаче при указанной скорости;
![]() i - коэффициент сопротивления дороги;
i - коэффициент сопротивления дороги;
![]() вр - коэффициент учёта вращающихся
масс.
вр - коэффициент учёта вращающихся
масс.
При проведении расчётов рассматриваем
движение по горизонтальной дороге, поэтому![]() (
(![]() -коэффициент сопротивления качению
колеса с учётом скорости движения).
-коэффициент сопротивления качению
колеса с учётом скорости движения).
Значение коэффициента
сопротивления качению колеса,![]() , необходимо рассчитывать по
формуле:
, необходимо рассчитывать по
формуле:
![]() , (1.16)
, (1.16)
![]()
где ![]() -коэффициент
сопротивления качению колеса (см. Приложение А).
-коэффициент
сопротивления качению колеса (см. Приложение А).
Коэффициент сопротивления качению колёс автопоезда:
![]() , (1.17)
, (1.17)
Коэффициент ![]() вр,
учитывающий наличие в движущемся автомобиле вращающихся масс, определяется:
вр,
учитывающий наличие в движущемся автомобиле вращающихся масс, определяется:
![]() , (1.18)
, (1.18)
![]()
где ![]() j - коэффициент,
учитывающий инерционный момент колёс (
j - коэффициент,
учитывающий инерционный момент колёс (![]() 1=0,04)
1=0,04)
![]() 2 - коэффициент, учитывающий
инерционный момент маховика (при расчётах принимают следующие значения: 0,0007
- для легковых автомобилей и для грузовых с дизельным двигателем; 0,0004 - для
грузовых с бензиновым двигателем).
2 - коэффициент, учитывающий
инерционный момент маховика (при расчётах принимают следующие значения: 0,0007
- для легковых автомобилей и для грузовых с дизельным двигателем; 0,0004 - для
грузовых с бензиновым двигателем).
Расчёт рекомендуется производить в табличной форме (таблица 1.3) для 8... 10 значений скорости на каждой рассматриваемой передаче до скорости, равной 0,9 от максимальной скорости, на высшей передаче.
Таблица 1.3 - Расчёт динамической характеристики автомобиля
| Параметры | Текущие значения параметров | |||||||||||||||||||||
|
|
0,1 | 0,2 | 0,3 | 0,4 | 0,5 | 0,6 | 0,7 | 0,8 | 0,9 | 1 | ||||||||||||
|
|
600 | 877,8 | 1156 | 1433 | 1711 | 1989 | 2267 | 2544 | 2822 | 3100 | ||||||||||||
|
|
360,6 | 379,4 | 394 | 404 | 409,6 | 411 | 408 | 401 | 389 | 373 | ||||||||||||
| 1-я передача | ||||||||||||||||||||||
|
|
0,681 | 0,996 | 1,31 | 1,63 | 1,943 | 2,258 | 2,57 | 2,89 | 3,2 | 3,52 | ||||||||||||
|
|
0,696 | 0,732 | 0,76 | 0,78 | 0,79 | 0,793 | 0,79 | 0,77 | 0,75 | 0,72 | ||||||||||||
|
|
0,03 | 0,03 | 0,03 | 0,03 | 0,03 | 0,03 | 0,03 | 0,03 | 0,03 | 0,03 | ||||||||||||
|
|
2,588 | 2,588 | 2,59 | 2,59 | 2,588 | 2,588 | 2,59 | 2,59 | 2,59 | 2,59 | ||||||||||||
|
|
2,521 | 2,658 | 2,76 | 2,84 | 2,878 | 2,888 | 2,87 | 2,81 | 2,72 | 2,61 | ||||||||||||
| 2-я передача | ||||||||||||||||||||||
|
|
1,236 | 1,808 | 2,38 | 2,95 | 3,525 | 4,097 | 4,67 | 5,24 | 5,81 | 6,39 | ||||||||||||
|
|
0,383 | 0,403 | 0,42 | 0,43 | 0,434 | 0,436 | 0,43 | 0,42 | 0,41 | 0,39 | ||||||||||||
|
|
0,03 | 0,03 | 0,03 | 0,03 | 0,03 | 0,03 | 0,03 | 0,03 | 0,03 | 0,03 | ||||||||||||
|
|
1,51 | 1,51 | 1,51 | 1,51 | 1,51 | 1,51 | 1,51 | 1,51 | 1,51 | 1,51 | ||||||||||||
|
|
2,293 | 2,421 | 2,52 | 2,59 | 2,624 | 2,63 | 2,61 | 2,55 | 2,47 | 2,35 | ||||||||||||
| 3-я передача | ||||||||||||||||||||||
|
|
2,213 | 3,23 | 4,26 | 5,29 | 6,311 | 7,336 | 8,36 | 9,38 | 10,4 | 11,4 | ||||||||||||
|
|
0,214 | 0,22 | 0,23 | 0,24 | 0,24 | 0,239 | 0,24 | 0,23 | 0,22 | 0,21 | ||||||||||||
|
|
0,03 | 0,03 | 0,03 | 0,03 | 0,031 | 0,031 | 0,03 | 0,03 | 0,03 | 0,03 | ||||||||||||
|
|
1,187 | 1,18 | 1,19 | 1,19 | 1,187 | 1,187 | 1,19 | 1,19 | 1,19 | 1,19 | ||||||||||||
|
|
1,517 | 1,60 | 1,67 | 1,71 | 1,727 | 1,721 | 1,69 | 1,64 | 1,57 | 1,47 | ||||||||||||
| 4-я передача | ||||||||||||||||||||||
|
|
3,447 | 5,04 | 6,64 | 8,24 | 9,832 | 11,43 | 13 | 14,6 | 16,2 | 17,8 | ||||||||||||
|
|
0,136 | 0,14 | 0,15 | 0,15 | 0,148 | 0,145 | 0,14 | 0,13 | 0,13 | 0,11 | ||||||||||||
|
|
0,03 | 0,03 | 0,03 | 0,03 | 0,032 | 0,032 | 0,03 | 0,03 | 0,03 | 0,04 | ||||||||||||
|
|
1,1 | 1,1 | 1,1 | 1,1 | 1,1 | 1,1 | 1,1 | 1,1 | 1,1 | 1,1 | ||||||||||||
|
|
0,946 | 0,99 | 1,03 | 1,04 | 1,032 | 1,005 | 0,96 | 0,89 | 0,8 | 0,7 | ||||||||||||
| 5-я передача | ||||||||||||||||||||||
|
|
5,068 | 7,41 | 9,76 | 12,1 | 14,45 | 16,8 | 19,1 | 21,5 | 23,8 | 26,2 | ||||||||||||
|
|
0,135 | 0,14 | 0,14 | 0,14 | 0,138 | 0,132 | 0,12 | 0,11 | 0,1 | 0,08 | ||||||||||||
|
|
0,03 | 0,03 | 0,03 | 0,03 | 0,034 | 0,035 | 0,04 | 0,04 | 0,04 | 0,04 | ||||||||||||
|
|
1,1 | 1,1 | 1,1 | 1,1 | 1,1 | 1,1 | 1,1 | 1,1 | 1,1 | 1,1 | ||||||||||||
|
|
0,933 | 0,96 | 0,98 | 0,97 | 0,926 | 0,861 | 0,77 | 0,66 | 0,52 | 0,35 | ||||||||||||
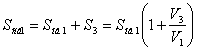
После проведённых вычислений необходимо построить графические зависимости ускорения разгоняющегося автомобиля от скорости (рисунок 1.3) и динамического фактора от скорости (рисунок 1.4).
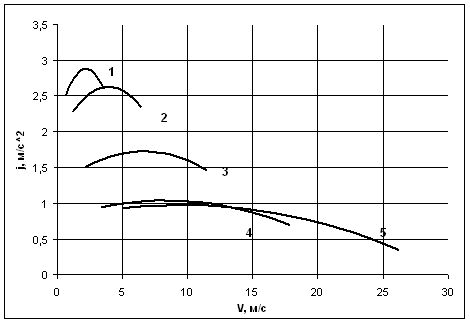
Рисунок 1.3 - Зависимость ускорения от скорости
Рисунок 1.4 - Зависимость динамического фактора от скорости
Дальнейший расчёт рекомендуется производить в табличной форме от значения скорости, равной скорости обгоняемого автомобиля. При этом принимается, что разгон осуществляется до максимально возможной скорости на каждой из передач с последующим переключением на высшую передачу. Передача, с которой начинается разгон, определяется по таблице 3.3, либо по Приложению Б.1.
Для расчета ![]() и
и ![]() в данных
условиях можно воспользоваться графоаналитическим методом. Для этого кривую
ускорения на одной из передач разбивают на ряд интервалов, начиная со скорости,
соответствующей скорости обгоняемого автомобиля. При этом считаем, что в каждом
интервале скоростей автомобиль движется с постоянным ускорением
в данных
условиях можно воспользоваться графоаналитическим методом. Для этого кривую
ускорения на одной из передач разбивают на ряд интервалов, начиная со скорости,
соответствующей скорости обгоняемого автомобиля. При этом считаем, что в каждом
интервале скоростей автомобиль движется с постоянным ускорением ![]() , величину которого
определяют по формуле:
, величину которого
определяют по формуле:
![]() , (1.19)
, (1.19)
![]()
где ![]() и
и ![]() - ускорения соответственно в начале и в конце
интервала скоростей, м/с2.
- ускорения соответственно в начале и в конце
интервала скоростей, м/с2.
При изменении скорости от Vi до Vi+1 среднее ускорение может быть определено:
![]() , (1.20)
, (1.20)
где![]() и
и ![]() - скорость в начале и в конце
интервала, м/с;
- скорость в начале и в конце
интервала, м/с;
![]() -время прохождения i-го интервала, с;
-время прохождения i-го интервала, с;
![]() - изменение скорости при прохождении i-го интервала, м/с.
- изменение скорости при прохождении i-го интервала, м/с.
Следовательно, время разгона в том же интервале скоростей:
![]() , (1.21)
, (1.21)
![]()
а общее время разгона:
![]() , (1.22)
, (1.22)
![]()
В случае, когда манёвр
обгона невозможно выполнить на одной передаче и необходимо переключатся на
другую (как правило повышенную) необходимо оценивать потерю скорости за время
переключения, ![]() , м/с, которая зависит от дорожных
условий и времени переключения,
, м/с, которая зависит от дорожных
условий и времени переключения, ![]() , с, определяемое квалификацией
водителя и техническим состоянием автомобиля (можно принять равным 1,3... 1,5 с
для переключения с первой на вторую передачу и 0,5... 1 с для всех остальных):
, с, определяемое квалификацией
водителя и техническим состоянием автомобиля (можно принять равным 1,3... 1,5 с
для переключения с первой на вторую передачу и 0,5... 1 с для всех остальных):
![]() , (1.23)
, (1.23)
![]()
При расчёте пути разгона принимаем условно, что автомобиль в каждом из намеченных интервалов скоростей движется с постоянной скоростью
![]() .
.
Тогда приращение пути в каждом из интервалов скоростей можно определить:
![]() , (1.24)
, (1.24)
![]()
Складывая полученные
значения ![]() получаем общий путь, Sp м,
который проходит обгоняющий автомобиль:
получаем общий путь, Sp м,
который проходит обгоняющий автомобиль:
![]() , (1.25)
, (1.25)
![]()
Путь, пройденный за время переключения передачи, вычисляется:
![]() , (1.26)
, (1.26)
![]()
где Vн— скорость в начале переключения передачи.
Результаты расчетов по формулам (1.20)-(1.22), (1.24) и (1.26) необходимо приводить в виде таблицы 1.4.
Таблица 1.4 - Время и путь обгона в сочетании с разгоном
| V, м/с |
Vср, м/с |
ϳср, м/с2 |
∆t, с |
tр, с |
∆S, м |
Sр, м |
|
| 1 | 16,2 | 0 | 0 | ||||
| 2 | 17,8 | 17 | 0,75 | 2,13 | 2,128 | 36,17 | 36,2 |
| 3 | 17,7 | 17,73 | -0,2 | 0,5 | 2,628 | 8,865 | 45 |
| 4 | 19,1 | 18,45 | 0,74 | 1,77 | 4,396 | 32,62 | 77,7 |
| 5 | 21,5 | 20,3 | 0,71 | 3,36 | 7,757 | 68,23 | 146 |
| 6 | 23,8 | 22,65 | 0,59 | 3,92 | 11,68 | 88,84 | 235 |
| 7 | 26,2 | 25 | 0,43 | 5,54 | 17,22 | 138,4 | 373 |
После произведённых
расчётов необходимо построить график интенсивности разгона ![]() , необходимый для
расчета пути и времени обгона с ускорением (рисунок 1.5). Для этого наносят
значения времени tp и пути Sp соответствующие разгону
обгоняющего автомобиля от скорости V2 и полученные точки соединяют
плавной кривой 1.
, необходимый для
расчета пути и времени обгона с ускорением (рисунок 1.5). Для этого наносят
значения времени tp и пути Sp соответствующие разгону
обгоняющего автомобиля от скорости V2 и полученные точки соединяют
плавной кривой 1.
Для определения времени и
пути обгона от начала координат откладывают вправо по горизонтали отрезок,
равный D1+L2- Из конца отрезка проводят наклонную прямую
2 изображающую движение обгоняемого автомобиля (график пути обгоняемого
автомобиля аналогичен графику при ![]() постоянной скорости). Точка А
пересечения этой прямой с кривой 1 соответствует моменту времени, когда
передние части обоих автомобилей находятся на одном уровне. Дальнейшее
построение аналогично описанному в разделе 1.1.
постоянной скорости). Точка А
пересечения этой прямой с кривой 1 соответствует моменту времени, когда
передние части обоих автомобилей находятся на одном уровне. Дальнейшее
построение аналогично описанному в разделе 1.1.
После проведения расчетов и построений следует проанализировать факторы, влияющие на путь и время обгона, а также условия движения, в которых возможен и практикуется такой маневр. Необходимо также сопоставить данный вариант обгона с рассчитанным в разделе 1.1.
2. Расчёт времени и пути незавершённого обгона
На практике часто встречаются случаи, когда водителю не удается закончить обгон, он вынужден уменьшить скорость и возвратиться в прежнее положение. Такой обгон называют незавершённым. Возможность выполнения этого маневра зависит как от тяговой, так и от тормозной динамичности автомобиля.
Незавершённый обгон условно можно разделить на три фазы, каждой из которых соответствует своё время движения:
1) в начале незавершённого обгона (время t1) обгоняющий автомобиль, двигаясь со скоростью V1 (как правило, равной скорости обгоняемого автомобиля V2), выезжает на соседнюю полосу движения и догоняет обгоняемый, увеличивая скорость до значения V1max;
2) решив отказаться от обгона, водитель снижает скорость автомобиля до минимально устойчивой скорости, V1min, для чего тормозит обычно с максимальной интенсивностью (время t2);
3) ведя автомобиль с минимальной скоростью, V1min, водитель пропускает вперед обгоняемый автомобиль и возвращается на прежнюю полосу (время t2).
Основными характеристиками, описывающими незавершённый обгон, являются время и путь незавершённого обгона. Для их расчёта следует считать, что обгон выполняется при разгоне обгоняющего автомобиля со скоростью V1 при движении на подъём с уклоном α = 15°.
2.1 Первый этап незавершённого обгона
В начале незавершённого обгона обгоняющий автомобиль разгоняется, выезжает на соседнюю полосу движения и догоняет обгоняемый автомобиль.
Т.к. обгон осуществляется по дороге имеющей уклон, а, то ускорение следует рассчитывать по формуле (1.15), с учётом того, что коэффициент сопротивления дороги, ψi, определяется по выражению:
![]() (2.1)
(2.1)
![]()
Процесс обгона на первом этапе до точки, пока автомобили поравняются (соответствует перемещению обгоняющего автомобиля, S1 за время t1), рассчитывается и строится аналогично процессу завершённого обгона с возрастающей скоростью (п. 1.2). При этом следует учитывать расстояние между передними частями обгоняемого и обгоняющего автомобиля, е, м, на которое обгоняющий автомобиль не догнал или обогнал обгоняемый (выбирается самостоятельно 0...3 м.).
Перемещение обгоняющего автомобиля, если известно максимальное значение скорости обгоняющего автомобиля, V1, можно определить по зависимости:
![]() , (2.2)
, (2.2)
а время первого этапа
![]() (2.3)
(2.3)
где е - расстояние между передними частями обгоняемого и обгоняющего автомобиля, м. Если обгоняющий автомобиль не догнал обгоняемый, то е берется со знаком минус, если обогнал - со знаком плюс.
После того, когда закончено построение зависимости пути и времени обгона по аналогии с п. 1.2 до точки, в которой передние части автомобилей поравнялись (с учётом расстояния е), от этой точки откладывается расстояние е (с учетом знака) и определяются значения S1 и t1.
Таблица 2.1 - Время и путь обгона в сочетании с разгоном
| V, м/с |
Vср, м/с |
ϳср, м/с2 |
∆t, с |
tр, с |
∆S, м |
Sр, м |
|
| 1 | 16,6 | 0 | 0 | ||||
| 2 | 17,8 | 17,2 | 0,75 | 1,6 | 1,596 | 27,45 | 27,4 |
| 3 | 17,66 | 17,73 | -0,2 | 0,5 | 2,096 | 8,865 | 36,3 |
| 4 | 19,1 | 18,45 | 0,74 | 1,77 | 3,864 | 32,62 | 68,9 |
| 5 | 20,8 | 19,95 | - | 1,7 | 5,564 | 33,92 | 103 |
| 6 | 20,8 | 20,8 | - | 3,8 | 9,364 | 79,04 | 182 |
| 7 | 3 | 11,9 | 4 | 5,7 | 15,06 | 66,6 | 248 |
2.2 Второй этап незавершённого обгона
В данном случае обгоняющий автомобиль снижает скорость до минимально устойчивой (3...5 м/с), V1min. Время этого этапа, t2, с, определяется:
t2=tp+t3+tн+tуст (2.4)
t2=0,2+0,3+1,5 +3,7=5,7 с.
где tp - время реакции водителя, с,
tp = 0,3.. .2,0 с; t3 - время запаздывания тормозного механизма, с (для тормозов с гидроприводом и дисковым механизмом t3 = 0,05...0,10 с; для тормозов с гидроприводом и барабанным механизмом t3=0,1...0,20 с; для систем с пневмоприводом t3 =0,3...0,4 с);
tн - время нарастания давления, tн=0,1... 1,5 с (меньшие значения для тормозов с гидроприводом, большие для систем с пневмоприводом);
tycm - время установившегося замедления, с.
Продолжительность времени установившегося замедления, tycm:
![]() , (2.5)
, (2.5)
![]()
где V1н - скорость обгоняющего автомобиля в начале участка tуст, м/с;
V1k - 3...5 м/с - минимально устойчивая скорость;
jycm - установившееся замедление, м/с2.
Скорость V1Н можно определить по выражению:
![]() , (2.6)
, (2.6)
![]()
где V1max - скорость начала торможения, т.е. V1max, м/с.
Установившееся замедление определяется по следующей зависимости:
![]() (2.7)
(2.7)
![]()
где φ х - коэффициент сцепления;
Кэ - коэффициент эффективности торможения.
Расчёт необходимо проводить для φ х = 0,6 с полной нагрузкой автомобиля.
Значения коэффициента эффективности торможения Кэ определяются для каждого автомобиля экспериментальным путём, но в большинстве случаев принимаются равными значениям в таблице 2.2.
Таблица 2.2 - Коэффициенты эффективности торможения
| Типы автомобилей | Категория | Без нагрузки, при φ | С нагрузкой 50%, при φ | С полной нагрузкой, при φ | |||||||||
| 0,8 | 0,7 | 0,6 | 0,5 | 0,8 | 0,7 | 0,6 | 0,5 | 0,8 | 0,7 | 0,6 | 0,5 | ||
| Одиночные и автопоезда | М1 | 1,28 | 1,12 | 1,0 | 1,0 | 1,40 | 1,22 | 1,05 | 1,00 | 1,50 | 1,32 | 1,13 | 1,00 |
| М2 | 1,42 | 1,24 | 1,07 | 1,0 | 1,56 | 1,37 | 1,17 | 1,00 | 1,74 | 1,52 | 1,30 | 1,09 | |
| М3 | 1,56 | 1,37 | 1,17 | 1,0 | 1,66 | 1,46 | 1,25 | 1,04 | 1,74 | 1,52 | 1,30 | 1,09 | |
| Одиночное | N, | 1,45 | 1,27 | 1,09 | 1,0 | 1,66 | 1,46 | 1,25 | 1,04 | 1,96 | 1,71 | 1,47 | 1,22 |
| N2 | 1,37 | 1,20 | 1,03 | 1,0 | 1,63 | 1,43 | 1,22 | 1,02 | 1,96 | 1,71 | 1,47 | 1,22 | |
| N3 | 1,28 | 1,12 | 1,0 | 1,0 | 1,56 | 1,37 | 1,17 | 1,0 | 1,96 | 1,71 | 1,47 | 1,22 | |
| Автопоезда с тягачами | N, | 1,66 | 1,46 | 1,25 | 1,04 | 1,82 | 1,59 | 1,36 | 1,14 | 1,96 | 1,71 | 1,47 | 1,22 1,22 |
| N2 | 1,60 | 1,40 | 1,20 | 1,0 | 1,78 | 1,56 | 1,33 | 1,11 | 1,96 | 1,71 | 1,47 | ||
| N3 | 1,56 | 1,37 | 1,17 | 1,0 | 1,74 | 1,52 | 1,30 | 1,09 | 1,96 | 1,71 | 1,47 | 1,22 | |
| Примечание - При коэффициентах сцепления от 0,4 и ниже величина Кэ для всех нагрузок автомобилей и всех категорий составляет 1,0. |
Длину второго участка, S2 м, необходимо определять по выражению:
![]() . (2.8)
. (2.8)
![]()
2.3 Третий этап незавершённого обгона
На этом этапе обгоняющий автомобиль движется с минимально устойчивой скоростью до тех пор, пока расстояние между автомобилями не станет равным Д2+L1.
Продолжительность этого этапа определяется графоаналитическим методом (рисунок 2.1) аналогично расчёту завершённого обгона в п. 3.1, с учетом того, что Д2 в опасной обстановке составляет 5... 15 м.
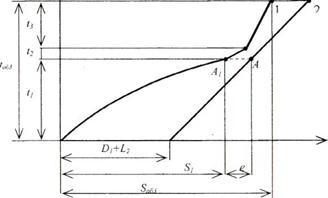
Рисунок 2.1 - График незавершенного обгона
В некоторых случаях необходимое расстояние между автомобилями достигается на втором этапе обгона, тогда процесс обгона заканчивается на участке t2 и третий этап отсутствует.
При определении пути и времени незавершённого обгона Sоб3 и tоб3 используется графический метод аналогично процессу завершённого обгона. Аналогично определяется и минимальное расстояние до встречного автомобиля Sсв3.
После проведения расчетов и построений следует проанализировать факторы, влияющие на процесс обгона, а также условия движения, в которых возможен и выполняется обгон.
Список использованных источников
1. Ульрих С.А. Определение параметров завершённого и незавершенного обгонов: методическое указание к проектированию по дисциплине «Безопасность транспортных средств» / С.А. Ульрих; Алт. гос. техн. ун-т им.И.И. Ползунова. Барнаул: Изд-во АлтГТУ,2009.-69 с..