Контрольная работа: Расчет основных параметров двигателя постоянного тока
Содержание
Содержание
1. Исходные данные. Задача
2. Решение задачи
3. Исходные данные. Задача
4. Решение задачи
Исходные данные
1. Исходные данные. Задача
В таблице 1 приведены данные двигателя постоянного тока
Таблица 1.
| Тип |
|
|
|
|
|
|
|
|
КПД,% |
GD, кгм2 |
| П21 | 1,5 | 220 | 9 | 3000 | 1,25 | 0,326 | 0,0546 | 636 | 76 | 0,045 |
Для двигателя постоянного тока с параллельным возбуждением требуется:
1. Рассчитать пусковой реостат и построить пусковые характеристики, если на валу
![]() ;
;
2. Определить
сопротивление, которое необходимо включать в цепь якоря, чтобы частота вращения
двигателя при номинальном моменте составляла ![]() ;
;
3. Рассчитать
сопротивление, которое следует включить в якорную цепь, чтобы при изменении
полярности питающего напряжения якоря ток его был равен ![]() при номинальной
скорости. Построить эту механическую характеристику;
при номинальной
скорости. Построить эту механическую характеристику;
4. Рассчитать
дополнительное сопротивление, ограничивающее в режиме динамического торможения
пик тока до ![]() при
номинальной скорости. Построить соответствующую характеристику;
при
номинальной скорости. Построить соответствующую характеристику;
5. Указать в чем недостатки реостатного регулирования, оценить его КПД.
2. Решение задачи
По номинальным данным строим механическую характеристику:
![]()
![]()
![]()

![]()
Определяем моменты:
а) пусковой (![]() ) – из условия
допустимого тока коммутации, т.е. возникновения кругового огня на коллекторе:
) – из условия
допустимого тока коммутации, т.е. возникновения кругового огня на коллекторе:
![]()
б) Переключения
пусковых ступеней (![]() ) – из условия
сохранения динамики при переключении пусковых ступеней реостата
) – из условия
сохранения динамики при переключении пусковых ступеней реостата
![]()
Полученные характеристики представлены на рисунке 2.
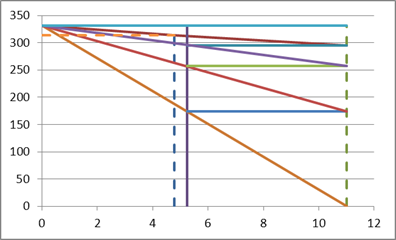
Рис.2. Технические характеристики двигателя
Определяем пусковой резистор ![]() :
:
![]() ,
,
![]() ,
,
![]()
![]() ,
,
Определяем пусковой резистор ![]() :
:
![]()
![]()
![]()
Определяем пусковой резистор ![]() :
:
![]()
![]()
![]()
Запишем уравнение механической характеристики с учетом требуемых значений параметров:
![]()
![]()
т.к. ![]() , следовательно
, следовательно ![]()
![]()
Запишем уравнение скоростной характеристики с учетом требуемых значений параметров:
![]()
![]()
![]()
![]()
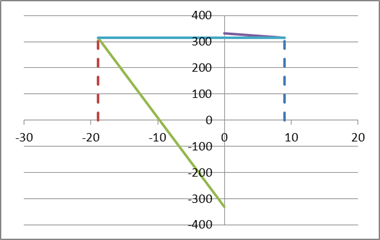
Рис. 3. Характеристика при смене питающего напряжения якоря, при токе ![]()
Рассчитать дополнительное сопротивление, ограничивающее в режиме
динамического торможения пик тока до ![]() при номинальной скорости. Построить соответствующую
характеристику:
при номинальной скорости. Построить соответствующую
характеристику:
![]()
![]()
![]()
![]()
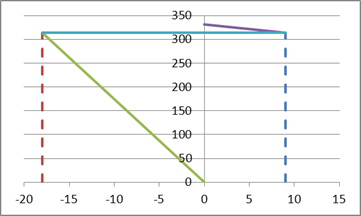
Рис. 4. Характеристика двигателя в режиме динамического торможения
При регулировании угловой скорости введением резисторов в цепь якоря, двигателя постоянного тока, потери мощности в этой цепи изменяются пропорционально перепаду угловой скорости. Если момент нагрузки постоянен, постоянна потребляемая мощность и угловая скорость двигателя уменьшается вдвое, то примерно половина мощности потребляемой из сети, будет рассеиваться в виде теплоты, выделяемой из реостата, то есть данный способ регулирования является не экономичным. КПД привода при реостатном регулирование может быть определен по формуле:
![]()
По номинальным данным строим механическую характеристику:
![]()
![]()
![]()
![]()
Определяем моменты:
а) пусковой (![]() ) – из условия
допустимого тока коммутации, т.е. возникновения кругового огня на коллекторе:
) – из условия
допустимого тока коммутации, т.е. возникновения кругового огня на коллекторе:
![]()
б) Переключения пусковых ступеней (![]() ) – из условия
сохранения динамики при переключении пусковых ступеней реостата
) – из условия
сохранения динамики при переключении пусковых ступеней реостата
![]()
Полученные характеристики представлены на рисунке 2.1
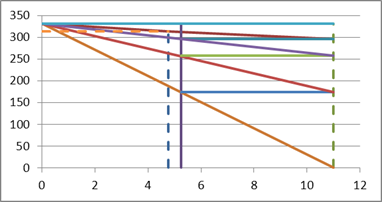
Рис.2.1 Технические характеристики двигателя
Определяем пусковой резистор ![]() :
:
![]() ,
,
![]() ,
,
![]()
![]() ,
,
Определяем пусковой резистор ![]() :
:
![]()
![]()
![]()
Определяем пусковой резистор ![]() :
:
![]()
![]()
![]()
Запишем уравнение механической характеристики с учетом требуемых значений параметров:
![]()
![]()
т.к. ![]() , следовательно
, следовательно

Запишем уравнение скоростной характеристики с учетом требуемых значений параметров:
![]()
![]()
![]()
![]()
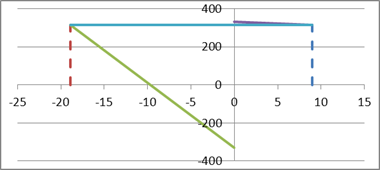
Рис. 2.2. Характеристика при смене
питающего напряжения якоря, при токе ![]()
Рассчитать
дополнительное сопротивление, ограничивающее в режиме динамического торможения
пик тока до ![]() при номинальной
скорости. Построить соответствующую характеристику:
при номинальной
скорости. Построить соответствующую характеристику:
![]()
![]()
![]()
![]()
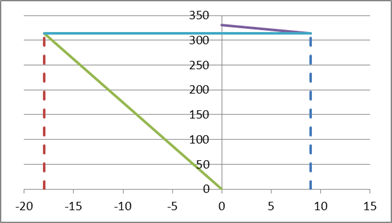
Рис. 2.3. Характеристика двигателя в режиме динамического торможения
При регулировании угловой скорости введением резисторов в цепь якоря, двигателя постоянного тока, потери мощности в этой цепи изменяются пропорционально перепаду угловой скорости. Если момент нагрузки постоянен, постоянна потребляемая мощность и угловая скорость двигателя уменьшается вдвое, то примерно половина мощности потребляемой из сети, будет рассеиваться в виде теплоты, выделяемой из реостата, то есть данный способ регулирования является не экономичным. КПД привода при реостатном регулирование может быть определен по формуле:
![]()
3. Исходные данные. Задача
Таблица 1. Тип двигателя – МТН 211-6
|
Рн, кВт |
nн, об/мин |
|
cosφ | Статор | Ротор |
Кс |
J, кгм2 |
|||||||
| ном | х.х |
IСН |
IСХ |
RC |
ХС |
ЕРН |
IРН |
rр |
хр |
|||||
| А | А | Ом | Ом | В | А | Ом | Ом | |||||||
| 8,2 | 900 | 2 | 0,7 | 0,112 | 24,6 | 19 | 0,835 | 0,88 | 257 | 23 | 0,466 | 0,666 | 2,18 | 0,46 |
Для асинхронного двигателя с фазным ротором требуется:
1. Построить естественную механическую характеристику.
2. Рассчитать
сопротивление пускового реостата и построить соответствующие характеристики,
если на валу ![]() ;
;
3. Построить
механическую характеристику в режиме динамического торможения при ![]() ,
, ![]() . Насыщение
магнитной системы не учитывать.
. Насыщение
магнитной системы не учитывать.
4. Изложить перспективные методы регулирования скорости двигателей переменного тока.
4. Решение задачи
Построить естественную механическую характеристику:
![]()
![]()

МКР = λ * МН=2*87,04=174,08 Нм
![]()
![]()
М1 = 0,885 * МКР,
М1 = 0,885 * 174,009 = 154.
М2 = 1,1 * МН,
М2 = 1,1 * 87,005 = 95,7.
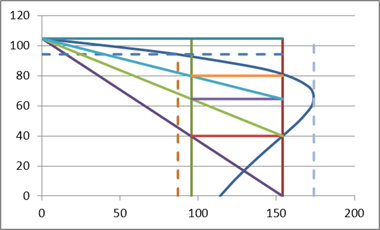
Рис. 4.1. Естественная и пусковые характеристики
Рассчитать сопротивление пускового реостата и построить соответствующие характеристики, если на валу МС = МН.
Определяем пусковой резистор RД1:
RР = 0,466 Ом,
аb = 24,67 мм,
ас = 40,17 мм,
R = RР * (ас/ab),
R = 0,466 * (40,17/24,67) = 0,759 Ом,
RД1 = R – RР,
RД1 = 0,759 – 0,466 = 0,293 Ом.
Определяем пусковой резистор RД2:
аb = 24,67 мм,
аd = 64,67 мм,
R = RР * (аd/ab),
R = 0,466 * (64,67 /24,67) = 1,22 Ом,
RД2 = R – (RР + RД1),
RД2 = 1,22 – (0,466 + 0,293) = 0,461 Ом.
Определяем пусковой резистор RД3 :
аb = 24,67 мм,
ае = 104,67 мм,
R = RР * (аe/ab),
R = 0,466 * (104,67 /24,67) = 1,97 Ом,
RД3 = R – (RР + RД1 + RД2 ),
RД3 = 1,97 – (0,466 + 0,293 + 0,461 ) = 0,289 Ом.
Пусковые характеристики представлены на рис.4.1.
Построить механическую характеристику в режиме динамического торможения при IВ = 2IОН, RДОБ = 0,3RНОМ. Насыщение магнитной системы не учитывать.
Определяем значение эквивалентного переменного тока:
IЭКВ
= ![]() *IП*2,
*IП*2,
IЭКВ
= ![]() *24,6*2 = 39,85
А
*24,6*2 = 39,85
А
Определяем максимальный момент:
МКР = ![]() ,
,
МКР = ![]() = 11,44 Нм
= 11,44 Нм
Определяем критическое скольжение:
SКР
= ![]() ,
,
SКР
= ![]() = 0,301.
= 0,301.
М = ![]() ,
,
Результаты расчетов сводим в таблицу 4.1
Таблица. 4.1
| М | S | ω |
| 0 | 0 | 0 |
| -13,4831 | 0,05 | 5,2335 |
| -21,2198 | 0,1 | 10,467 |
| -23,4877 | 0,15 | 15,7005 |
| -22,9107 | 0,2 | 20,934 |
| -21,2906 | 0,25 | 26,1675 |
| -19,4496 | 0,3 | 31,401 |
| -17,6981 | 0,35 | 36,6345 |
| -16,1308 | 0,4 | 41,868 |
| -14,7599 | 0,45 | 47,1015 |
| -13,5692 | 0,5 | 52,335 |
| -12,5348 | 0,55 | 57,5685 |
| -11,6331 | 0,6 | 62,802 |
| -10,8432 | 0,65 | 68,0355 |
| -10,1473 | 0,7 | 73,269 |
| -9,5309 | 0,75 | 78,5025 |
| -8,98184 | 0,8 | 83,736 |
| -8,49022 | 0,85 | 88,9695 |
| -8,04784 | 0,9 | 94,203 |
| -7,64791 | 0,95 | 99,4365 |
| -7,28481 | 1 | 104,67 |
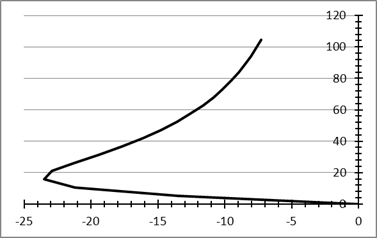
Рис.4.2 Механическая характеристика в режиме динамического торможения.
| ... обслуживания и ремонта карбюраторов двигателей легковых автомобилей | |
|
Введение Самый перспективный бизнес на рынке техники - автосервис. Спрос на автосервис постоянно увеличивается. Парк автомашин будет расти еще много ... Наиболее эффективным средством улучшения пусковых качеств горячего двигателя является вентиляция поплавковой камеры. ЭПХХ обеспечивает отключение подачи топлива через систему холостого хода во время движения автомобиля под уклон, во время торможения автомобиля двигателем, при переключении передач ... |
Раздел: Рефераты по транспорту Тип: дипломная работа |
| Проект электрокотельной ИГТУ | |
|
Содержание 1. Введение 1.1 Энергетика Иркутской области, перспективы развития 2. Общая часть 2.1 Краткая характеристика объекта и источников ... Iпуск - номинальный пусковой ток двигателя Для грунта типа суглинок удельное сопротивление растекания тока составляет: Ом-м |
Раздел: Рефераты по физике Тип: дипломная работа |
| Модернизация двигателя мощностью 440 квт с целью повышения их технико ... | |
|
Overview Лист1 Диаграмма1 Лист2 Sheet 1: Лист1 Пояснение к выполнению раздела дипломного проекта по охране труда "Расчёт уровней вибрации (по ... Монтажные операции отличаются большим разнообразием, что обусловлено сложностью механического оборудования - главных двигателей, валопроводов, винторулевых комплексов ... палец в бобышках поршня не закрепляется, поэтому во время работы двигателя он поворачивается вокруг своей оси, и шатун имеет угловое перемещение относительно оси пальца. |
Раздел: Рефераты по транспорту Тип: реферат |
| Электрические аппараты | |
|
Раздел 1. Основы теории электрических аппаратов Лекция № 1 Электрический аппарат - это электротехническое устройство, которое используется для ... Так, пусковой ток асинхронного двигателя с короткозамкнутым ротором может достигать 7 Iном. В цепи вторичных обмоток трансформаторов тока через мосты VI-V3 включены нагрузочные резисторы, напряжения на которых пропорциональны токам двигателя. |
Раздел: Рефераты по физике Тип: учебное пособие |
| Двигатель ЗиЛ-130 | |
|
Содержание: 1. Введение 2 стр. 2. Двигатель ЗиЛ-130 : 4 стр. -кривошитно-шатунный механизм двигателя 4 стр. -газораспределительный механизм двигателя ... Для прогрева двигателя применяют пусковой подогреватель. При малой частоте вращения коленчатого вала двигателя контакты прерывателя продолжительное время находятся в замкнутом состоянии, сила тока в первичной цепи возрастает, резистор ... |
Раздел: Рефераты по транспорту Тип: реферат |