Курсовая работа: Електромеханічний привід виконуючого механізму
Міністерство освіти і науки України
Полтавський національний технічний університет імені Юрія Кондратюка
Електромеханічний факультет
Кафедра обладнання нафтових та газових промислів
КУРСОВИЙ ПРОЕКТ
з дисципліни:
“Основи конструювання механічної частини електроприводів”
на тему:
“Запропонувати електромеханічний привід виконуючого механізму”
Варіант №6
Вступ
В цій РПЗ приведені деякі розрахунки електромеханічного приводу ланцюгового транспортера.
Ланцюговий транспортер це — машина неперервної дії для переміщення кускових або штучних вантажів, яка широко застосовується при механізації та автоматизації промислових процесів в різних галузях народного господарства.
Ланцюговий транспортер (рис.1) виконаний у вигляді двох зірочок: ведучої 1 та веденої 2, через які перекинуто транспортерний ланцюг 3. Ведена зірочка має натяжний пристрій гвинтового типу 4. Тяговим та вантажонесучим органом у ланцюгового транспортера є ланцюг 3 та напрямлячі-опори 5, які розташовані як під верхньою, так і під нижньою гілками ланцюга. Швидкість руху ланцюга коливається від 1 до 8 м/с в залежності від виду транспортуємого вантажу та умов експлуатації.
Проектуємий електропривід буде передавати обертовий рух ведучій зірочці 1.
Транспортні пристрої забезпечують неперервність технологічних процесів, тому до них застосовують особливі вимоги по надійності та довговічності. У зв’язку з цим оптимальним приводом для ланцюгового транспортера буде електричний привід з асинхронним електродвигуном змінного струму, який має суттєву перевагу у порівнянні з іншими видами приводів (гідравлічним та пневматичним).
Приводи з асинхронними двигунами широко розповсюджені в робототехнічних та технологічних комплексах. Це пояснюється тим, що асинхронні двигуни мають просту конструкцію, надійні в експлуатації, дешевші, значно легші та менші за розмірами від електричних двигунів іншого типу.
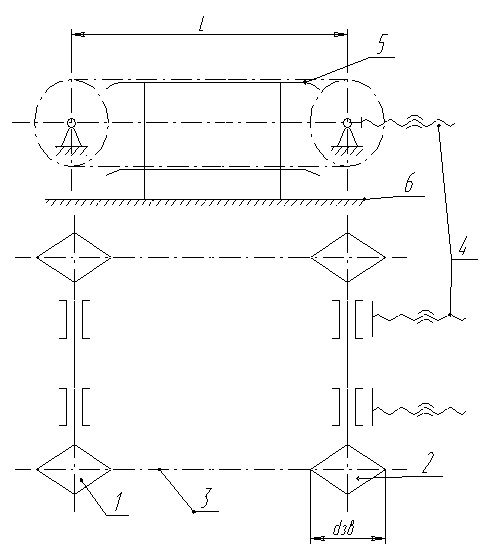 |
Рис. 1. Кінематична схема стрічкового транспортера:
1 — зірочка ведуча,
2 — зірочка ведена,
3 — ланцюг транспортний,
4 — пристрій натяжний,
5 — направляючі,
6 –– станина.
Враховуючи викладене вважаємо, що основною метою цього проекту є розробка такої конструкції передаточного механізму електроприводу, яка б відповідала всім вимогам, що ставляться в технічному завданні.
Для успішного вирішення поставленої задачі в проектуємому передаточному механізмі необхідно використати якомога більше число серійно виготовляємих складових частин, що мають гарантовану заводом-виробником надійність та довговічність.
1. Опис будови та принципу дії електроприводу
В результаті техніко-економічного аналізу (див. розділ 4) вибрано кінематичну схему розробляємого електроприводу (рис.2).
Електропривід включає двигун М, який за допомогою пружної втулочно-пальцевої муфти МУВП з’єднаний з вхідним валом черв’ячного редуктора Ч250. На вихідний вал черв’ячного редуктора насаджено зірочку Z1, яка за допомогою втулочно-роликового ланцюга Ц з’єднана з веденою зірочкою Z2, що закріплена на валу ведучої зірочки ланцюгового транспортера. Ланцюгова передача має натяжний ролик НР.
Електродвигун з черв’ячним редуктором змонтовані на окремій рамі, тобто виконані у вигляді самостійного блоку, який розташований під холостою гілкою стрічкового транспортера. Така компоновка електропривода відповідає принципам блочно-модульної побудови машин, дозволяє вписатися в габарити ланцюгового транспортера та дає можливість зручного обслуговування складових частин електропривода при експлуатації.
Технічна характеристика електропривода
1. Номінальний обертовий момент на вихідному валу, Нм —6180;
2. Частота обертання вихідного вала, об/хв — 17;
3. Електродвигун — АИР160S6У3, Р = 11,0 кВт, n = 970 об/хв;
4. Редуктор — Ч-250-50-19,4-51-У3, Твих = 4120 Нм при nб = 1000 об/хв;
5.
Габаритні
розміри, мм ![]() довжина —1312, ширина —648,
висота —760;
довжина —1312, ширина —648,
висота —760;
6. Маса, кг ~600.
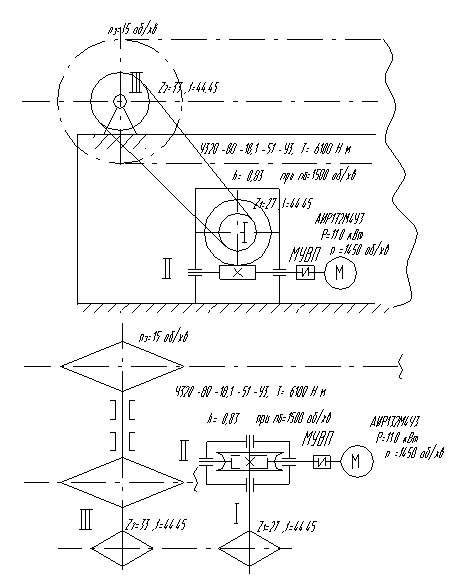 |
Рис.2. Кінематична схема електроприводу ланцюгового транспортера:
2. Попередній вибір електродвигуна
Визначаємо корисну потужність, яка необхідна для привода стрічкового транспортера, за формулою:
Ркор =
Ткор![]() , (1)
, (1)
де Ткор — середній момент корисного опору на ведучому барабані за графіком навантаження, Нм;
![]() — кутова швидкість ведучої зірочки,
с-1.
— кутова швидкість ведучої зірочки,
с-1.
Враховуючи характер навантаження (див. рис. 2 в технічному завданні)
Ткор = (Тх 0,5t + 0,8Тх0,5 t)/(0,5 t +0,5 t)=0,9Т=0,9х3750=3375 Нм.
де Т — діючий момент корисного опору на ведучому барабані —3750 Нм, який заданий;
t — час дії навантаження, хв.
![]() = p n/30=pх 17/30=1,78 1/с.
= p n/30=pх 17/30=1,78 1/с.
де n — частота обертання ведучої зірочки 17 об/хв по завданню.
Підставивши
отримані значення Ткор та ![]() в
рівняння (1), отримаємо:
в
рівняння (1), отримаємо:
Ркор = 3375 х1,78= 6007,5 Вт
Необхідну потужність елкктродвигуна визначаємо за формулою:
Рнеобх
= к Ркор /![]() , (2)
, (2)
де к — коефіцієнт запасу, величина якого згідно даних [1] коливається від 1,1 до 1,2; приймаємо 1,1;
Ркор = 6007, 5 Вт;
![]() — коефіцієнт корисної дії
передаточного механізму, склад якого невідомий; тому попередньо приймаємо
— коефіцієнт корисної дії
передаточного механізму, склад якого невідомий; тому попередньо приймаємо ![]() = 0,7.
= 0,7.
Тоді
Рнеобх = 1,1 х6007,5 /0,7 = 9440,35 Вт
Номінальну потужність Рном встановлюємого електродвигуна визначаємо по каталогу [2] виходячи із співвідношення:
Рном ![]() Рнеобх
Рнеобх
Враховуючи, що електродвигуни змінного струму по масі на 50% легші та вимагають в 4,5 рази менших витрат міді у порівнянні з електродвигунами постійного струму [2], мають більш високу ступінь захисту, а також у зв’язку з умовами роботи стрічкового транспортера та вимогами технічного завдання, в проектуємому електроприводі орієнтуємося на застосування трифазних асинхронних електродвигунів змінного струму з короткозамкнутим ротором, як найбільш простих, надійних та дешевих.
В електроприводі, що ми проектуємо можуть бути використані асинхронні електродвигуни, технічні показники яких наведені в таблиці 1.
Таблиця 1.Технічні показники електродвигунів, що призначені для використання в електроприводі.
| Марка і тип | Р, кВт | n, об/хв | Маса кг |
L B H,мм |
db, мм |
lb, мм |
Тпуск Тном |
Тмакс Тном |
mD2, кг м2 |
|
| АИР132М4У3 | 11,0 | 1450 | 83,5 |
538 302 350 |
38 | 80 | 2 | 2,2 | 0,04 | 0,875 |
| АИР160S6У3 | 11,0 | 970 | 100 |
624 358 430 |
48 | 110 | 2 | 2,7 | 0,12 | 0,88 |
Р — номінальна потужність двигуна,
n — асинхронна частота обертання вала,
L, B, H — довжина, ширина та висота двигуна,
db — приєднувальний діаметр вала,
lb — довжина приєднувальної частини вала,
Тпуск/Тном і Тмакс/Тном — відношення пускового та максимального моментів до номінального моменту, що розвиває двигун,
m D2 — маховий момент ротора двигуна,
![]() — коефіцієнт корисної дії.
— коефіцієнт корисної дії.
3. Компоновка кінематичної схеми електропривода
Попередньо вибрані до встановлення два типи двигунів з синхронними частотами обертання валів1000, 1500 об/хв визначають дві можливих варіанти кінематичних схем передаточного механізму.
Визначаємо для кожного варіанта передаточне відношення по формулі:
і = nдв/nЗ, (3)
деnдв — асинхронна частота обертання якоря двигуна, об/хв,
n — частота обертання ведучої зірочки ланцюгового транспортера, об/хв, і результати розрахунків зводимо в таблицю 2.
Таблиця 2. Передаточні відношення передаточних механізмів
електроприводу для різних двигунів
| Варіанти | 1 | 2 |
|
Частота обертання вала двигуна асинхронна, nдв, об/хв |
1450 | 970 |
|
Частота обертання ведучої зірочки ланцюгового транспортера nЗ, об/хв |
17 | 17 |
|
Передаточне відношення і = nдв/nЗ |
85,29 | 57 |
Далі визначаємо передаточне відношення передаточного механізму електропривода транспортера за умови мінімального часу пуску. Розрахунок ведемо згідно слідуючої таблиці 3, враховуючи, що момент інерції ротора двигуна пропорційний його маховому моменту.
Таблиця 3.Динамічні характеристики електроприводів
| Характеристики двигунів за каталогом | Розрахунковіі величини | ||||
| Тип |
Рном, кВт |
nном, об/хв |
m D2, кг м2 |
і= nдв/nб |
m D2 i2, кг м2 |
| АИР132М4У3 | 11,0 | 1450 | 0,04 | 85,29 | 291 |
| АИР160S6У3 | 11,0 | 970 | 0,12 | 57 | 390 |
Наведені розрахунки свідчать про те, що при мінімальному часі пуску оптимальним буде електропривід з двигуном АИР132М4У3, так як він має найменший добуток m D2 i2. Цей двигун має (див. табл. 1) найменшу масу серед розглянутих двигунів. Як видно з таблиці 1, із підвищенням частоти обертання якоря маса двигуна та його габаритні розміри зменшуються, знижується ціна, а ККД збільшується. Але робочий ресурс також зменшується.
Враховуючи викладене, для розробки компоновочних схем електропривода, зупинимося на електродвигунах АИР132М4У3 та АИР160S6У3
Розробляючи кінематичні схеми передаточних механізмів, враховуємо також вимоги найменших габаритних розмірів і можливість вписатися в габаритні розміри ланцюгового транспортера. Звісно, найбільш зручним буде електропривід, який буде розташований під ланцюговим транспортером. Така умова потребує застосування в якості останнього ланцюга електропривода механічної передачі з гнучким зв’язком. Для тихохідних механізмів (транспортерів і конвейєрів), що має місце в нашому випадку, рекомендують ланцюгові передачі, на якій ми й зупинимося [3].
Орієнтуючись на ці обмеження, компонуємо кінематичні схеми електроприводу з вибраним двигуном. В якості складових частин використовуємо якомога більше серійно випускаємих механічних редукторів, муфт, гнучких зв’язків і т.д., так як тільки в цьому разі ми можемо досягти найбільш економічного рішення, найбільшої довговічності та надійності приводу.
Таблиця 4. Перелік складових частин електроприводів та розбиття передаточного числа
| Варіант | Двигун | Муфта | Редуктор | Ланцюгова передача |
і = ір іц |
| 1 |
АИР132М4У3 Р = 11,0 кВт n = 1450 об/хв |
МУВП 250-38-38-1-1-У3 ГОСТ 21424-75 Т=250 Нм d=38 і 38 мм 1,1тип,
|
Черв’ячний редуктор Ч320-80-51-1-2Ц-У3
по ТУ2-056-1-32-75; 51-варіант складання, 1-2 - варіанти розташування Ц-циліндр. кінці валів |
t=44,45 мм Z1 =27 Z2 = 29 іц = 1,06
|
85,29 |
| 2 |
АИР160S6У3 Р = 11,0 кВт n = 970 об/хв |
МУВП 710-48-48-1-1-У3 ГОСТ 21424-75 Т=710 Нм d=48 і 48 мм 1,1тип,
|
Ч250-50-51-1-2-Ц-У3
по ТУ2-056-1-32-75; u=50 (передаточне число) 51-варіант складання, 1-2 - варіанти розташування Ц-циліндр. кінці валів |
t=44,45 мм Z1 = 27 Z2 = 31 іц = 1,14
|
57 |
4. Вибір електродвигуна та аналіз кінематичних схем електроприводу
Уточнюємо коефіцієнти корисної дії кожного варіанта, основуючись на тому, що складові частини електропривода мають слідуючі значення ККД згідно [2].
Черв’ячний
редуктор Ч320, і = 80![]() чр = 0,83
чр = 0,83
Черв’ячний
редуктор Ч250, і = 50![]() чр = 0,82
чр = 0,82
Муфта пружна МУВП![]() м = 0,99
м = 0,99
Ланцюгова
передача![]() лп = 0,95
лп = 0,95
Тоді, відповідно до варіантів загальний ККД передаточного механізму буде рівний:
1 — ![]() 1 =
1 = ![]() м
м![]() чр
чр![]() лп = 0,99 х 0,83 х 0,95 = 0,78
лп = 0,99 х 0,83 х 0,95 = 0,78
2 — ![]() 2 =
2 = ![]() м
м![]() чр
чр![]() лп = 0,99 х 0,82 х 0,95 = 0,77
лп = 0,99 х 0,82 х 0,95 = 0,77
Тепер, маючи уточнене значення ККД та величину корисної потужності, визначаємо по відомій формулі (2) необхідну потужність електродвигуна для кожного варіанта
1 — Рнеобх1
= к Ркор/![]() 1 = 1,1
х 6007,5 х /0,78 = 8472,1 Вт
1 = 1,1
х 6007,5 х /0,78 = 8472,1 Вт
2 — Рнеобх2
= к Ркор/![]() 2 = 1,1
х 6007,5 х /0,77 = 8582,1 Вт
2 = 1,1
х 6007,5 х /0,77 = 8582,1 Вт
Основуючись на уточнених розрахунках необхідної потужності та виконуючи умову
Рном![]() Рнеобх,
Рнеобх,
для кожного варіанта приймаємо слідуючі асинхронні електродвигун змінного струму
1 варіант АИР132М4У3Р = 11,0 кВт,
n = 1450 об/хв;
2 варіант АИР160S6У3 Р = 11,0 кВт,
n = 970 об/хв
Таблиця 6. Результати розрахунків коефіцієнта якості електроприводів
| Варіанти |
Габ. розм. LxBxH мм |
Маса кг | Усталена поту-жність,кВт | ККД | Дійсний оберт. момент Т на вих. валі Нм |
| 1 | 950х500х300 | 881,5 | 11,0 | 0,78 | 3750 |
| 2 | 1312х648х760 | 600 | 11,0 | 0,77 | 3750 |
Результати приведених розрахунків свідчать про те, що найбільш прийнятним по коефіцієнтам якості є перший варіант,але через його велику масу і велику громіздкість компоновки перевагу віддаємо другому варіанту.
5. Теплова перевірка вибраного двигуна
Теплову перевірку двигуна проводимо за методом еквівалентних моментів [4], рахуючи, що між струмом та моментом вибраного двигуна існує прямопропорційна залежність.
Визначаємо величину еквівалентного моменту корисного опору на ведучому барабані стрічкового транспортера за формулою:
 (5)
(5)
де Т1 — момент корисного опору на ведучій зірочці на протязі часу
t1 = 0,5t рівний діючому моменту Т, Нм,
Т2 — момент корисного опору на ведучій зірочці на протязі часу
t2 = 0,5t рівний 0,8 діючого момента Т, Нм,
Т — діючий момент корисного опору по завданню 3750 Нм.
Після підстановки значень в формулу (5) отримуємо
![]() =Ö0,82Т²=0,9Т=0,9х3750=3375
Нм.
=Ö0,82Т²=0,9Т=0,9х3750=3375
Нм.
Приводимо
еквівалентний момент корисного опору ![]() до валу
двигуна, використовуючи співвідношення
до валу
двигуна, використовуючи співвідношення
![]()
деТекв — приведений до валу двигуна еквівалентний момент корисного опору, Нм,
u — передаточне число передаточного механізму приводу рівне 57,
![]() м — ККД передаточного механізму 0,77.
м — ККД передаточного механізму 0,77.
Тоді Текв
=![]() /uhм=3375/57х0,77=76,896 Нм.
/uhм=3375/57х0,77=76,896 Нм.
Номінальний момент, що розвиває двигун, рівний
![]() ,
,
деР — номінальна потужність двигуна 11000 Вт,
![]() — номінальна кутова
швидкість усталеного руху якоря двигуна
— номінальна кутова
швидкість усталеного руху якоря двигуна
wном=pn/30=3,14х970/30=101,53 1/с.
Таким чином
Тном=Р/wном =11000/101,53=108,34 Нм.
Так як номінальний момент, розвиваємий двигуном Тном більше еквівалентного моменту навантаження Текв, тобто
Тном > Текв,
то двигун не буде перегріватися.
Вибраний двигун допускає короткочасне перевантаження при пуску Тпуск/Тном = 2, що більше ніж по завданню Тпуск = 1,8Т.
Виконання двигуна по способу монтажу М100, тобто на лапах, по ступеню захисту ІР44, тобто закритий з зовнішнім обдувом від власного вентилятора. Двигун може працювати при температурі навколишнього повітря від -40 до +40 оС.
6. Визначення динамічних показників
Для уточнення пускового моменту та розрахунку динамічної міцності обертаючихся деталей приводу, визначаємо момент сил інерції, який необхідно перебороти двигуну при пуску, за методикою, яка викладена в [5].
Ті = Іпр![]() e, (6)
e, (6)
де Іпр
— приведений до вала двигуна момент інерції складових частин виконавчого
механізму і приводу, кг![]() м2,
м2,
e — кутове прискорення вала двигуна, с-2.
Приведений до вала двигуна момент інерції визначаємо за формулою:
Іпр = Ідв
+ ![]() (7)
(7)
де Ідв — момент інерції якоря двигуна та муфти по даним [2] складає 0,12+ 0,32= 0,44 кгм2,
Ізір —
момент інерції стальної зірочки (![]() = 7800
кг/м3), шириною а = 0,02 м.
= 7800
кг/м3), шириною а = 0,02 м.
Діаметр зірочки Z/t=10/125:
Ізір=mr²/2=(r/2)a(pD²/4)(D/2)= pD² D²ra/32=0,409 кгм²
Будемо вважати, що грузонесучий ланцюг та маса вантажу, яка на ньому знаходиться зосереджена на ободі зірочки, тоді момент інерції ланцюга з вантажем буде рівний
Іланц =
mланц![]() rзір2
= mланц(D/2)2,
rзір2
= mланц(D/2)2,
mланц=F/g; F=Т/( D/2)=2Т/ D; mланц =2Т/ g D=2х3750/9,81х0,405=1890 кг
D — зовнішній діаметр ведучої зірочки ланцюгового транспортера,
Таким чином Іланц =1890х(0,405/2)²=77,5 кгм².
Іпр = 0,44 +(4х0,409+77,5)/50² = 0,472 кгм2.
Для обчислення кутового прискорення визначаємо час пуску двигуна tп за формулою:
![]() (8)
(8)
де Іпр — приведений до вала двигуна момент інерції 0,472 кгм2,
![]() ном — номінальна кутова
швидкість якоря двигуна
ном — номінальна кутова
швидкість якоря двигуна
wном=pn/30=3,14х970/30=101,53 1/с.
Тп — пусковий момент двигуна, рівний двом номінальним моментам Тном по даним [2].
Тп = 2Тном = 2Р/wном =22000/101,53=218,68 Нм.
Тоді
tп = 0,472х101,53/216,68 = 0,22 с
Середнє кутове прискорення
e=wном / tп = 461,5 с–2.
Підставляючи отримані значення в формулу (6), отримуємо що
Тu = 0,472х461,5= 217,82 Нм,
менше пускового моменту, розвиваємого двигуном Тп = 218, 68 Нм.
Враховуючи, що
процес розгону якоря двигуна від ![]() поч
= 0 до
поч
= 0 до ![]() ном = 101,53 с-1
можна вважати завершеним за час 2/3 tп, так як на протязі цього часу
кутова швидкість двигуна досягає
ном = 101,53 с-1
можна вважати завершеним за час 2/3 tп, так як на протязі цього часу
кутова швидкість двигуна досягає ![]() 0,9
0,9 ![]() ном, визначимо
максимально можливий момент сил інерції на валу двигуна і порівняємо його з
максимальним моментом, короткочасно розвиваємий двигуном
ном, визначимо
максимально можливий момент сил інерції на валу двигуна і порівняємо його з
максимальним моментом, короткочасно розвиваємий двигуном
eмах = 0,9хwном /(2/3 tп)= 623 с-2
Тоді
Тu макс = 0,472х623= 139,68 Нм
По даним [2] двигун допускає короткочасне перевантаження
Тмакс = 2,2 Тном = 2,2х108,34= 238,34 Нм
Враховуючи отримані результати, коли Тu макс <Тмакс, слід в інструкції по експлуатації на ланцюговий транспортер вказати обмеження на увімкнення електроприводу
“ Ланцюговий транспортер можна запускати з навантаженням ”, але щоб уникнути аварійної ситуації практично завжди його запускають без навантаження.
7. Розрахунки на довговічність
Аналізуючи проведені в розділах 5 і 6 розрахунки, необхідно відмітити наступне.
На протязі 0,5 часу циклу t ведуча зірочка ланцюгового транспортера повинна розвивати обертовий момент
Тзір(0,5t) = 3750 Нм,
а на протязі часу 0,5t момент
Тзір(0,5t) = 0,8х4250 = 3000 Нм.
Встановлений в
приводі двигун АИР160S6У3 потужністю Р = 11000 Вт
при номінальній кутовій швидкості ![]() ном
= 101,53 с-1 розвиває номінальний момент Тном = 108,34
Нм, що на ведучій зірочці ланцюгового транспортера складе
ном
= 101,53 с-1 розвиває номінальний момент Тном = 108,34
Нм, що на ведучій зірочці ланцюгового транспортера складе
Тзір(ном)
= Тномu![]() = 108,34х57х0,77=
4755 Нм
= 108,34х57х0,77=
4755 Нм
Таким чином на протязі 0,5t часу цикла перевантаження двигуна складе
n = 3750/4755=0,79,тобто перенавантаження не буде.
Перевірка двигуна за умови нагріву та перевантажувальній здатності дала позитивні результати, тому вважаємо, що момент корисного опору Тзір(0,5t) = 3750 Нм, діючий на протязі 0,5 часу циклу t, не буде давати негативного впливу на працездатність двигуна на протязі необхідного строку служби стрічкового транспортера Lріч = 8 років по завданню, чого не можна стверджувати про черв’ячний редуктор моделі Ч250, встановлений у приводі.
Враховуючи викладене, необхідно виконати розрахунки на довговічність черв’ячної пари, а також валів редуктора.
7.1 Визначення довговічності черв’ячної пари
У відповідності з даними [2] черв’ячний редуктор Ч250 з передаточним числом u = 50 може передавати наступні обертові моменти Тчр:
¾
при
частоті обертання швидкохідного вала nш = 1000 об/хв Тчр(1000)
= 4120 Нм з ККД ![]() = 0,82;
= 0,82;
¾
при
частоті обертання швидкохідного вала nш = 750 об/хв Тчр(750)
= 4820 Нм з ККД ![]() =0,81.
=0,81.
Шляхом
інтерполірування визначаємо, що при nб = 970 об/хв, що відповідає
номінальній частоті обертання вала привідного електродвигуна, черв’ячний
редуктор здатний передавати момент Тчр(970) = 4204 Нм з ККД ![]()
![]() 0,819.
0,819.
Таким чином перевантаження черв’ячного редуктора на протязі 0,5 часу циклу t складе
nчр = ![]()
де Тзір(0,5 t) = 3750 Нм;
![]() ланц — ККД ланцюгової передачі
ланц — ККД ланцюгової передачі ![]() 0,95;
0,95;
Тчр(970) = 4204 Нм.
nчр = 3750/(0,95х4204)= 0,938
Для черв’ячного редуктора перевантаження не має.У відповідності з даними [7] використаний черв’ячний редуктор Ч250 з u = 50 має наступне співвідношення основних параметрів:
¾ міжосьова відстань aw = 250 мм,
¾ передаточне число u = 50,
¾ число зубців черв’ячного колеса Z2= 50,
¾ число заходів черв’яка Z1 = 1,
¾ осьовий модуль m = 8 мм,
¾ коефіцієнт діаметра черв’яка q = 20,
¾ коефіцієнт зміщення черв’яка х = 0.
Визначаємо діючі контактні напруження на зубцях колеса за формулою джерела [9] на протязі першого та другого періодів циклу:
 (9)
(9)
де Z2 = 50; q = 20; aw = 250 мм;
Т2 —
обертовий момент на вихідному валі редуктора, має два значення при ККД
ланцюгової передачі ![]() ланц =
0,95.
ланц =
0,95.
На протязі 0,5 часу циклу t
Т2(0,5
t) = Тзір(0,5t)/ ![]() ланц =3750/0,95=3947,36
Нм
ланц =3750/0,95=3947,36
Нм
і на протязі 0,5 часу циклу t
Т2(0,5
t) = Тзір(0,5t)/ ![]() ланц =
3000/0,95=3157,29 Нм
ланц =
3000/0,95=3157,29 Нм
Кн — коефіцієнт розрахункового навантаження при якісно виготовленій передачі та коловій швидкості колеса V2 < 3 м/с, що має місце у нашому випадку
(V2 = pd 2 n 2 /60х1000=0,406 м/с),
приймають рівним одиниці.
Тоді
sн(0,5t) =(5400/(50/20))Ö( ((50/20 )+1)/250) ³х3947,36х1,2=246,25 МПа
sн(0,5t) =220,25 МПа.
Загальне число циклів зміни напружень N для черв’ячного редуктора складає
N = 60 n2 Lh,
де n2 — частота обертання тихохідного вала19,4 об/хв,
Lh — машинний час роботи електропривода
Lh = Lріч 365 Кріч 24 Кдоб ПВ,
де Lріч — строк служби по завданню 8 років,
365 — число днів у році,
Кріч — коефіцієнт річного використання 0,8,
24 — число годин у добі,
Кдоб — коефіцієнт добового використання 0,3,
ПВ — відносна тривалість увімкнення, для неперервного режиму рівна 1.
Таким чином
Lh = 8х365х0,8х24х0,3х1 = 16820 годин
Або
N = 60х19,4х16820
![]() 1,95х107 циклів.
1,95х107 циклів.
Далі визначимо довговічність черв’ячної пари при діючих контактних напруженнях
sн(0,5t) =246,25МПа, sн(0,5t) =220,25 МПа.
та порівняємо її з необхідною по завданню.
Перше напруження діє на протязі
N0,5 t = 0,5 N = 0,975х107 циклів,
а друге напруження діє на протязі
N0,5 t = 0,5 N = 0,975х107 циклів.
По даним заводу-виробника редукторів вінець черв’ячного колеса виготовлений з бронзи БрА9Ж3Л відцентровим литвом, яка має
![]() т = 200 МПа та
т = 200 МПа та ![]() в = 500 МПа, а
черв’як із сталі 40Х із шліфованою та полірованою поверхнею.
в = 500 МПа, а
черв’як із сталі 40Х із шліфованою та полірованою поверхнею.
Для коліс із БрА9Ж3Л при шліфованих та полірованих черв’яках з твердістю поверхні витків НRC > 45 при швидкості ковзання витків Vs по зубцях колеса менше 6 м/с, що має місце в нашому випадку
Vs = (pmqn 1 /60х1000)хcos(arctg(Z1/q)=5,81 м/с,
допустимі контактні напруження згідно [7] приймають в межах
![]() (10)
(10)
Підставимо ![]() т = 200 МПа та Vs
= 5,81 м/с в рівняння (10), отримуємо
т = 200 МПа та Vs
= 5,81 м/с в рівняння (10), отримуємо
[![]() ]н = 300 —
25х5,81
]н = 300 —
25х5,81 ![]() 2х200 або [
2х200 або [![]() ]н = 154,75...
400 МПа
]н = 154,75...
400 МПа
Враховуючи, що для кривих втоми виконується рівність
[![]() ]нmNб
=
]нmNб
= ![]() нmN =
const,(11)
нmN =
const,(11)
де [![]() ]н — допустимі
контактні напруження
]н — допустимі
контактні напруження ![]() 375 МПа,
375 МПа,
m — показник степеня 8,
Nб — базове число циклів навантажень 107,
![]() н — діючі контактні напруження,
величина яких по нашим розрахункам складає
н — діючі контактні напруження,
величина яких по нашим розрахункам складає
![]() н(0,5 t) =246,25 МПа і
н(0,5 t) =246,25 МПа і ![]() н(0,5
t) = 220,25 МПа,
н(0,5
t) = 220,25 МПа,
N — ресурс бронзового вінця черв’ячного колеса в циклах.
Після підстановки
відповідних значень в рівняння (11) отримуємо, що вінець черв’ячного колеса
може витримати при ![]() н(0,5 t)
н(0,5 t)
N(0,5 t) = 28,29х107,
а при ![]() н(0,5 t)
н(0,5 t)
N(0,5 t) = 71,26х107 циклів.
Так як по завданню N(0,5 t) = 0,975х107, а N(0,5 t) = 0,975х107 вважаємо, що черв’ячна пара забезпечую необхідну по завданню довговічність приводу
Lh = 16820 годин.
7.2 Визначення довговічності вала черв’яка
Для цього в першу чергу накреслимо черв’ячну пару редуктора Ч250, який встановлений в передаточному механізмі електроприводу ланцюгового транспортера, в ізометрії (рис. 5) та визначимо величину сил, що діють в полюсі черв’ячного зачеплення.
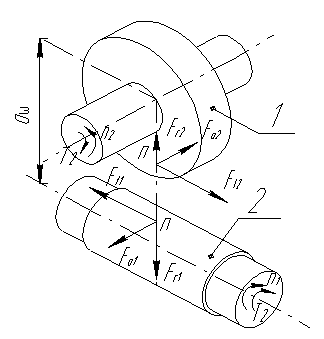 |
Рис. 5. Схема сил діючих в черв’ячному зачепленні:
1 — колесо (колесо і черв’як умовно розведені),
2 — черв’як.
Колова сила черв’яка Ft1, рівна осьовій силі колеса Fa2
Ft1 = Fa2 = 2T1/d1,
де Т1 — обертовий момент на валу черв’яка
Т1 = Рhм/wном = 107,26 Нм
(р — номінальна потужність електродвигуна 11000 Вт,
![]() — номінальна кутова швидкість
вала електродвигуна 101,53 с-1,
— номінальна кутова швидкість
вала електродвигуна 101,53 с-1,
![]() м — ККД муфти, яка з’єднує вал
електродвигуна та вал черв’яка,
м — ККД муфти, яка з’єднує вал
електродвигуна та вал черв’яка, ![]() 0,99),
0,99),
d1 — ділильний діаметр черв’яка d1 = qm = 20х8= 160 мм = 0,16 м.
Після підстановки значень маємо
Ft1 = Fa2 = 2х107,26/0,16 = 1340,75 Н
Колова сила колеса Ft2, рівна осьовій силі черв’яка Fa1
Ft2 = Fa2 = 2T2/d2,
де Т2 — обертовий момент на колесі
Т2 = Т1u![]() чр = 107,26х50х0,819=
4392,3 Нм
чр = 107,26х50х0,819=
4392,3 Нм
(тут Т1
= 107,26 Нм, u — передаточне число редуктора50, ![]() чр
— ККД редуктора
чр
— ККД редуктора ![]() 0,819),
0,819),
d2 — ділильний діаметр колеса
d2 = mZ2 = 8х50 = 400 мм = 0,4 м
Тоді
Ft2 = Fa1
= 2х4392,3 /0,4 ![]() 21961,5 Н
21961,5 Н
Радіальні сили, що діють в полюсі зчеплення черв’ячної пари
Fr1 = Fr2
= Ft2 tg![]() = 21961,5 х tg
20o =21961,5 х0,36397 = 7992,3 H
= 21961,5 х tg
20o =21961,5 х0,36397 = 7992,3 H
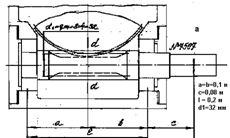
Далі виконуємо ескізну компоновку вала черв’яка в зібраному вигляді та будуємо розрахункові схеми вала (рис.6). Потім окремо креслимо розрахункові схеми сил, які діють в вертикальній та горизонтальній площинах (рис. 7 і 8) на вал черв’яка, і для кожного діючого навантаження будуємо епюри сил та моментів.
 |
Розрахунки реакцій опор, згинаючих та обертаючих моментів викладаємо нижче в послідовності розрахункових схем діючих сил, які наведені на рис.7 і 8.
Рис. 6. Ескізна компоновка вала черв’яка в зібраному виді (а) і розрахункові схеми вала черв’яка: б — загальна, в,г — сили Ft, Fr i Fa приведені до осі вала та зображені окремо в вертикальній та горизонтальній площинах.
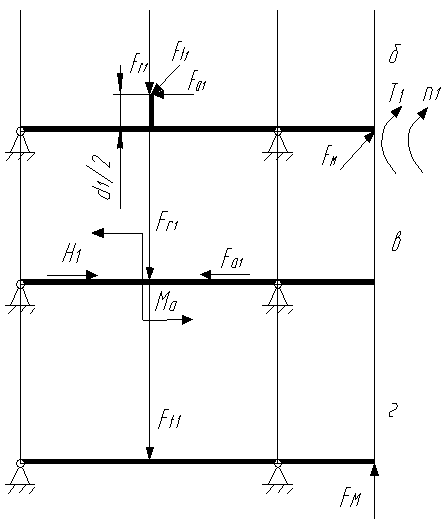
Рис. 7. Розрахункові схеми (а, г), епюри сил (б, д) та епюри згинаючих
моментів (в, е) для вала черв’яка від навантажень, діючих у вертикальній площині.

Рис.8. Розрахункові схеми (а, г), епюри сил (б, д) та епюри згинаючих моментів (в, е) для вала черв’яка від навантажень, діючих в горизонтальнійплощині, та епюра обертового моменту (ж).
Від радіальної сили Fr1
![]() Мb = Ra(Fr) хl
– Fr1хb = 0,
Мb = Ra(Fr) хl
– Fr1хb = 0,
Ra(Fr) = 7992,3х0,19/0,38= 3996,15 H
Rb(Fr) = 3996,15 H
![]() М(Fr) (d-d)= 759,26 Hм
М(Fr) (d-d)= 759,26 Hм
Від момента Ма
![]() Мb(Ma) = Ra(Ma)
хl — Ma = 0,
Мb(Ma) = Ra(Ma)
хl — Ma = 0,
Ma = Fa1хd1/2 = = 988,26 Hм
Ra(Ma) = Ma / l = 988,26/0,38=2600,7 Н
Rb(Ma) = Ra(Ma) = 2600,7 Н
ММа( d-d )= Ra(Ma) ха =494,13 Hм
Від колової сили Ft1
![]() Mb = Ra(Ft)
l — Ft1 b = 0,
Mb = Ra(Ft)
l — Ft1 b = 0,
Ra(Ft) = Ft1 b/ l = 670,35 H
Rb(Ft) = 670,35 H
М(Ft) (d-d) = 127,37 Нм
Від додаткової сили Fм = (0,1...0,3)Ft1=200 Н, яка виникає при неспіввісності напівмуфти.
![]() Mb = Ra(Fм)l
— FмC = 0,
Mb = Ra(Fм)l
— FмC = 0,
Ra(Fм) = FмC/ l=200х0,14/0,38 = 73,68 H
![]() Ma = –Fм(С
+ l) + Rb(Fм)l = 0,
Ma = –Fм(С
+ l) + Rb(Fм)l = 0,
Rb(Fм) = Fм(С + l)/ l = 200х1,14/0,38=600 H
М(Fм) (d-d )= Ra(Fм) ха=14 Нм
Обертовий момент Т1
Т1 = Ft1 d1/2 = 1340,75х0,16/2= 107,26 Нм
Сумарний згинаючий момент в найбільш напруженому перерізі d—d буде дорівнювати:
М(d-d )= 1261,33Нм
Повні радіальні реакції опор А і В відповідно будуть рівні:
Ra= 6638,67 Н
Rb= 1397,22 Н
Визначаємо
амплітудні значення напружень згину ![]() а
в найбільш напруженому перерізі d—d вала черв’яка за відомою формулою:
а
в найбільш напруженому перерізі d—d вала черв’яка за відомою формулою:
![]() ,
,
де ![]() — сумарний згинаючий
момент в перерізі d — d 1261,33 Нм,
— сумарний згинаючий
момент в перерізі d — d 1261,33 Нм,
W — момент опору
при згині поперечного перерізу вала черв’яка W![]() 0,1
d3 (тут d — діаметр ділильного циліндра черв’яка 0,16 м).
0,1
d3 (тут d — діаметр ділильного циліндра черв’яка 0,16 м).
Після підстановки значень маємо
![]() а=
а=![]() u= 1261,33/0,0004=3 МПа
u= 1261,33/0,0004=3 МПа
Можливий строк служби вала черв’яка по напруженням згину в найбільш напруженому перерізі d — d визначаємо використовуючи методику, викладену в джерелі [2] за формулою:
![]() (12)
(12)
де ![]() і — діюче
згинаюче напруження в небезпечному перерізі
і — діюче
згинаюче напруження в небезпечному перерізі
![]() і =
і = ![]() u = 3 МПа
u = 3 МПа
![]() -1 — границя витривалості при
симетричному циклі навантаження, для сталі 40Х, із якої виготовлений черв’як,
-1 — границя витривалості при
симетричному циклі навантаження, для сталі 40Х, із якої виготовлений черв’як, ![]() -1 = 350... 420
МПа, приймаємо
-1 = 350... 420
МПа, приймаємо ![]() -1 = 380
МПа,
-1 = 380
МПа,
Кб —
коефіцієнт концентрації напружень, при змінному навантаженні ![]() 1,5,
1,5,
Nі — можливий строк служби в циклах,
Nб — базове число циклів навантаження 107,
m — показник степеня, змінюється в межах від 6 до 10, приймаємо m = 9, як для деталі малого діаметру,
Еs —
масштабний кофіцієнт ![]() 0,8,
0,8,
Е![]() — коефіцієнт, що
враховує стан поверхні, для шліфованої та полірованої поверхні черв’яка
— коефіцієнт, що
враховує стан поверхні, для шліфованої та полірованої поверхні черв’яка ![]() 0,9,
0,9,
Еt — коефіцієнт, що враховує вплив робочої температури 1,0,
n — коефіцієнт
запасу ![]() 1,4.
1,4.
Підставляючи прийняті значення в рівняння (12), отримуємо
Ni = 0,434х1018 циклів,
Так як Ni > 25х107 то приймаймо Ni = 25х107 циклів
що складає довговічність в годинах при частоті обертання вала черв’яка n1=970 об/хв
Lh = ![]() = 2874 годин.
= 2874 годин.

Рис. 10. Структурна схема електропривода
1 — електродвигун,
2 — муфта гнучка,
3 — редуктор черв’ячний,
4 — передача ланцюгова,
5 — зірочка ведуча.
8. Розрахунок ланцюгової передачі
Виконаний у відповідності з методикою, яка викладена в главі 10 джерела [3].
Вихідні дані:
¾ Частота обертання ведучої зірочки n1 = 19,4 об/хв.
¾ Передаточне число u = 1,14.
¾ Середній момент корисного опору на валу веденої зірочки, який рівний середньому моменту корисного опору на валу ведучої зірочки ланцюгового транспортера, Т2 = 3375 Нм.
¾ Розташування лінії центрів передачі — під кутом 30о до горизонту.
¾ Передача — відкрита, змащування постійне за допомогою крапельниці.
¾ Натягування ланцюга за допомогою підпружиненого ролика, тобто автоматичне.
У відповідності з рекомендаціями [3] приймаємо число зубців зірочок:
ведучої Z1 = 29-2u=29–2х1,14=26,72, приймаємо Z1=27 i веденої Z2 = uZ1=1,14 х27=30,78. приймаємо Z2=31;
Визначаємо коефіцієнт експлуатації Ке, що враховує конкретні умови монтажа та експлуатації ланцюгової передачі за формулою:
Ке = К1 К2 К3 К4 К5 К6, (15)
де К1 — коефіцієнт, що враховує характер зміни навантаження; при постійному навантаженні, без різких коливань, що має місце в нашому випадку, К1 = 1,0;
К2 — коефіцієнт, що враховує вплив міжосьової відстані а; при а = (30...60) t (t — крок ланцюга), К2 = 1,0;
К3 — коефіцієнт, величина якого залежить від кута нахилу передачі до горизонту, якщо кут менше 60о (у нас 30о), то К3 = 1,0;
К4 — коефіцієнт, що враховує спосіб регулювання натягнення ланцюга, для автоматичного способу К4 = 1,0;
К5 — коефіцієнт, що враховує вплив способу змащення передачі, при крапельному змащуванні К5 = 1,2;
К6 — коефіцієнт змінності; так як коефіцієнт добового використання стрічкового транспортера по завданню Кдоб = 0,3, тобто одну зміну, то К6 = 1,0.
Тоді маємо
Ке =1х1х1х1х1,2х1 = 1,2
Середній момент
корисного опору на валу ведучої зірочки Z1 при ККД ланцюгової
передачі ![]() ланц = 0,95
ланц = 0,95
Т1 = 3375/1,14х0,95=3116,3 Нм
Визначаємо крок
ланцюга типа ПР нормальної точності при розрахунковій довговічності 10000
годин, прийнявши орієнтовно за нормами DІN8195 допустимий середній тиск при
швидкості ланцюга V![]() 1 м/с [P] = 25
МПа, за наступною формулою:
1 м/с [P] = 25
МПа, за наступною формулою:
t =  (16)
(16)
деТ1 = 3116,3 Нм = 3116,3 х103 Нмм,
Ке = 1,2;Z1 = 27;
[P] = 25 МПа (Н/мм2)
Після підстановки значень маємо
t = 46,38 мм
Приймаємо найближче стандартне значення t = 44,45 мм.
Визначаємо швидкість ланцюга
V = Z1 t n1/60000= 0,39 м/с
Перевіряємо розрахований тиск за формулою (16)
Р = 2,8³х Т1 Ке / Z1 t³ = 34,26 МПа
[P]=34,3 МПа
Умова Р ![]() [P] виконана, тому строк
служби ланцюга електроприводу 16820 годин
[P] виконана, тому строк
служби ланцюга електроприводу 16820 годин
До встановлення приймаємо ланцюг привідний роликовий однорядний з кроком t = 44,45 мм, руйнуюче навантаження якої Fв = 172,4 кН, маса m = 7,5 кг/м. Умовне позначення ланцюга
Ланцюг ПР 44,450-17240 ГОСТ 13568-75.
Визначаємо геометричні параметри передачі:
Міжосьова відстань
а = 40t = 40х44,45 = 1778 мм,
число ланок ланцюга
Lt = 2а/t + 0,5(Z1 + Z2) = 2х40 + 0,5(27+31) = 109
розрахункова довжина ланцюга
L = Lt t = 109х44,45 = 4845 мм
Перевіряємо ланцюг на число ударів, використовуючи формулу:
W = ![]() (17)
(17)
деZ1 = 27; n1 = 19,4об/хв; Lt = 109
Після підстановки значень отримуємо
W = 4х27х19,4/60х109=0,32 с-1
Допустиме значення
[W] = 508/t = 508/44,45 = 11,43 с-1,
умова W![]() [W] виконується.
[W] виконується.
Коефіцієнт запасу міцності ланцюга визначаємо за формулою:
S = ![]() , (18)
, (18)
де Fв — руйнуюче навантаження ланцюга 172400 Н,
Ft — колове зусилля на зірочці
Ft = 2Т1p/ Z1 t= 16,3 кН;
Fц — навантаження від відцентрових сил
Fц = mV2 = 7,5х0,322 = 1,14 Н;
Ff — сила від провисання ланцюга
Ff = 9,81
Kf ma (тут Кf — коефіцієнт ![]() 4,
m = 7,5 кг/м, а = 1,778 м)
4,
m = 7,5 кг/м, а = 1,778 м)
Ff = 9,81х4х7,5х1,778
![]() 523,27 Н.
523,27 Н.
Після підстановки отриманих значень в формулу (18) маємо
S = 17240/(16300+1,14+523,27)= 10,24
При частоті
обертання меншої зірочки n1![]() 20
об/хв для ланцюга з кроком t = 44,45 мм нормативний коефіцієнт запасу міцності
[S] = 7,6. Отже, умова S
20
об/хв для ланцюга з кроком t = 44,45 мм нормативний коефіцієнт запасу міцності
[S] = 7,6. Отже, умова S ![]() [S]
виконується.
[S]
виконується.
9. Розрахунок імовірності безвідмовної роботи електропривода
Розрахунок виконано у відповідності з методикою, викладеною в главі 18 джерела [2].
Структурна схема електропривода разом з ведучою зірочкою ланцюгового транспортера показана на рис.10. Такий склад електропривода зв’язаний з тим, що ведена зірочка ланцюгової передачі насаджена на вал ведучої зірочки.
Розподіл імовірності безвідмовної роботи електроприводу експоненційне. По табл. 18.1 знаходимо середні величини параметрів потоку відмов на 105 годин роботи електроприводу:
¾
асинхронний
електродвигун![]() 1 = 0,86;
1 = 0,86;
¾
муфта
гнучка![]() 2 = 0,07;
2 = 0,07;
¾
редуктор
черв’ячний![]() 3 = 0,02;
3 = 0,02;
¾
передача
ланцюгова![]() 4 = 0,50;
4 = 0,50;
¾
барабан
ведучий![]() 5 = 0,10.
5 = 0,10.
Параметр потоку відмов всієї системи становить:
![]() = (0,86 + 0,07 + 0,02 + 0,50
+ 0,10)х10-5 = 1,55х10-5 1/г.
= (0,86 + 0,07 + 0,02 + 0,50
+ 0,10)х10-5 = 1,55х10-5 1/г.
З урахуванням реальних умов експлуатації приймаємо по табл. 18.2 значення поправочного коефіцієнта інтенсивності відмов як для стаціонарного наземного пристрою
Кл = 10.
Тоді розрахункова середня величина параметра потока відмов буде рівна
![]() =1,55х10-5х10 = 1,55х10-4
1/г.
=1,55х10-5х10 = 1,55х10-4
1/г.
Імовірність
безвідмовної роботи електропривода на протязі 2000 годин, тобто на протязі ![]() пів-року експлуатації
(судячи по даному строку служби Lh = 8 років та машинному часу
роботи електропривода стрічкового транспортера 16820 годин) складе
пів-року експлуатації
(судячи по даному строку служби Lh = 8 років та машинному часу
роботи електропривода стрічкового транспортера 16820 годин) складе
Р![]() (t) = exp (-
(t) = exp (-![]()
![]() розр
розр
![]() t) =
exp (-1,55х10-4х2000) = 0,73;
t) =
exp (-1,55х10-4х2000) = 0,73;
тобто на протязі
пів-року експлуатації ![]() кожний четвертий
електропривід по тим чи іншим причинам буде відмовляти.
кожний четвертий
електропривід по тим чи іншим причинам буде відмовляти.
Середній час напрацювання на відмову для електроприводів розробленої конструкції складе:
Т0 = ![]() = 6452 години
= 6452 години
Підвищення показників надійності електроприводу може бути досягнено за рахунок застосування асинхронних електродвигунів змінного струму уніфікованої серії Інтерелектро — АИ2, а також передаточних механізмів — механічних редукторів сучасної конструкції.
| № | Електродвигун | Муфта | Редуктор | Ланцюгова передача | Рама |
| 1 |
АИР132М4У3, Р=11,0кВт,n=1450 об/хв, Тп/Тн=2; Тм/Тн=2,2 mD2=0,04 кг м2 Габаритні розміри 538х302х350 m = 83,5 кг db=38мм,lb=80мм |
МУВП 250-38-1.1-38-1.1 - У3 ГОСТ 21424-75 Т=250Нм,
mD2=0,054 кг м2 m= 18 кг |
Ч320-80-51-1-2-Ц-У3 по ТУ2-056-1- 32-75; Т=6100 Нм;
Маса =780 кг Габ. розміри 590х490х875 мм Швидкохідний вал db=38 мм,lb=80 мм Тихохідний вал dm=120 мм,lm=170 мм Допустиме консольне навантаження на тихохідний вал 7000 Н |
t = 44,45 мм Z1 = 27 Z2 = 29 iл = 1,06
m = 7,5 кг |
600х180х40 m= 16кг |
| 2 |
АИР160S6У3, Р=11,0кВт,n=970 об/хв, Тп/Тн=2; Тм/Тн=2,7 mD2=0,12 кг м2 Габаритні.розміри 1312х648х760 m = 100 кг db=48мм,lb=110мм |
МУВП 710-48-1.1- У3 ГОСТ 21424-75 Т=710 Нм,
mD2=0,32 кг м2 m= 25 кг |
Ч250-50-51-1-2-Ц-У3 по ТУ2-056-1- 32-75; Т=4120 Нм;
Маса=400,0 кг Габ. розміри 480х415х705 мм Швидкохідний вал db=48 мм,lb=80мм Тихохідний вал dm=120 мм,lm=170 мм Допустиме консольне навантаження на тихохідний вал 7000 Н |
t = 44,45 мм Z1= 27 Z2 = 31 iл = 1,14
m = 7,5 кг |
600х180х40 m= 16кг |
Література
1. Кацман М.М. Электрические машины и электропривод автоматических устройств. — М.: Высш. шк., 1987. — 335 с.
2. Приводы машин: Справочник /В.В. Длоугий, Т.И. Муха, А.П. Цупиков, Б.В. Януш; Под общ. ред. В.В. Длоугого. — 2-е изд., перераб. и доп. Л.: Машиностроение, Ленингр. отд., 1982. — 383 с.
3. Проектировние механических передач: Учебно-справочное пособие для втузов С.А. Чернавский, Г.А. Снесарев, Б.С. Козинцов и др. — 5-е изд., перераб и доп. — М.: Машиностроение, 1984. — 560 с.
4. Куликов А.А. Основы електропривода. — Киев, Вища школа, 1977. — 184 с.
5. Прикладная механика: Учеб. пособие для вузов /Рук.авт.кол.проф. К.И. Заблонский. — 2-е изд, перераб. и доп. — Киев: Вища школа. Головное изд-во, 1984. — 280 с.
6. Анурьев В.И. Справочник конструктора-машиностроителя. В трёх т. — 5-е изд., перераб. и доп. — М.: Машиностроение, 1979.—559 с. т.1 — 728 с., т.2 — 559 с., т.3 — 557 c.
7. Тарабасов Н.Д., Учаев П.Н.Проектирование деталей и узлов машиностроительных конструкций: Справочник. — М.: Машиностроение, 1983. — 239 с.
8. ГОСТ 16162-85 Редукторы общего назначения. Общие технические требования.
9. Павлище В.Т. Основи конструювання та розрахунок деталей машин. — Київ: Вища школа, 1993. — 556 с.
10. Цехнович Л.И., Петриченко И.Н. Атлас конструкций редукторов. Учебное пособие. 2-е издание переработанное и дополненное. — Киев, Высшая школа, 1990 — 151 с.
Додаток 1
Додаток до завдання на курсовий проект
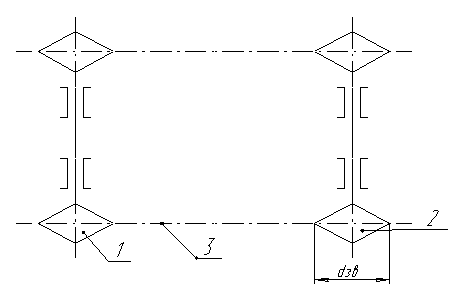
Рис. 1. Кінематична схема ланцюгового транспортера
(без електроприводу та натяжного пристрою):
1 — зірочка приводна (ведуча),
2 — зірочка натяжна (холоста),
3 — ланцюг транспортера
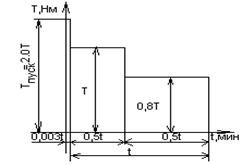
Рис. 2.Графіки навантаження:
(Т — діючий момент корисного опору,
t — тривалість циклу,
Тпуск — пусковий момент.
Тпуск = к*Т, де к = 2,0.