Курсовая работа: Проектирование цифровой линии
Содержание
1. Общая характеристика системы управления
2. Расчет и выбор основных технических характеристик системы
2.1 Определение частоты дискретизации
2.2 Определение разрядности квантователя
2.3 Выбор группового сигнала и расчет его параметров
2.4 Расчет энергетического потенциала
2.5 Выбор структурной схемы передатчика
2.6 Структурная схема приемника
2.7 Описание функциональной схемы передатчика
2.8 Описание функциональной схемы приемника.
2.9 Схемная разработка системы кадровой синхронизации
3. Контур управления и его анализ
4. Разработка функциональной схемы радиолинии
4.1 Некоторые сведения об используемом сигнале
4.2 Функциональная схема передающей части
4.3 Описание функциональной схемы передатчика
4.4 Описание функциональной схемы приемника
5. Разработка принципиальной схемы системы тактовой синхронизации
6. Конструкция бортового приемника
Список литературы
1. Общая характеристика системы управления
Под управлением в самом общем случае понимается осуществление совокупности воздействий, выбранных из множества возможных на основании определенной информации и направленных на поддержание или улучшение функционирования некоторого объекта в соответствии с заданной целью.
Контролем называется получение и обработка информации о состоянии объекта и внешних условиях с целью обнаружения событий, определяющих управляющие воздействия, которые должны быть оказаны на объект. Обработка информации при контроле заключается в сравнении с установками одного или нескольких параметров, характеризующих состояние объекта, формировании и выдаче заключения о результате.
Под командным радиоуправлением понимается такое радиоуправление при котором команды формируются на пункте управления, на борт они передаются по специальной радиолинии. В состав командной радиолинии входят система выработки команд, система приема команд на борту и среда распространения. Основными требованиями к КРЛ:
- высокая помехозащищенность
- криптостойкость
- имитостойкость
На борт летательного аппарата передается несколько команд, поэтому радиолиния является многоканальной.
Обобщенную структурную схему передающей командной радиолинии можно представить так рис.1
Передающая часть
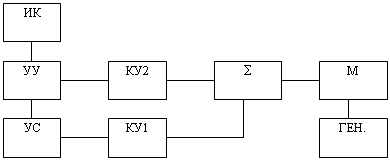 |
Рис.1
ИК - источник команд; УС - устройство синхронизации
КУ - командное устройство; М - модулятор
ГЕН. - генератор.
От ИК мы получаем те сообщения, которые необходимо передать. В устройстве уплотнения мы объединяем передаваемые команды - групповой сигнал. В УУ каждое сообщение перемножается на свое кодовое слово. С помощью сумматора å происходит объединение группового сигнала и синхросигнала. Далее осуществляется модуляция несущего колебания.
Назначение приемника - принять сигнал, максимизировать отношение С/Ш и в конечном итоге каждому абоненту (определенному устройству) передать адресованное ему сообщение.
Приемная часть
 |
Рис.2
РК - распределитель каналов ЛПЧ - линейная часть приемника
УРК - устройство разделения каналов ДКУ - декодирующее устройство
СС - схема синхронизации
Если используется система с частотным разделением каналов, то СС не нужна в этом случае. Если используется разделение по времени или по форме, то СС обязательна.
В процессе управления на борт ракеты, по командной радиолинии, передаются множество различных команд, чтобы осуществить передачу по командной радиолинии нескольких независимых команд одновременно, необходимо сделать ее многоканальной.
Также как и в других многоканальных системах, в командной радиолинии для передачи каждого независимого сообщения выделяется отдельный канал. Разделения каналов между собой производится по временному, частотному или кодовому признакам. При этом в каждом канале формируется свое вспомогательное поднесущее колебание импульсное при временном или кодовом разделении каналов и непрерывное при разделении каналов по частоте.
При создании современных систем передачи используются как сложные сигналы (ШПС), так и сигналы с многоступенчатой модуляцией. На первой ступени используется, как правило, кодово-импульсная модуляция (КИМ), а на последующих - амплитудная модуляция (АМ), частотная (ЧМ), фазовая (ФМ). Наиболее часто встречаются сочетания КИМ-ЧМн-ФМ, КИМ-ЧМ-АМ, КИМ-АМ-ФМ, КИМ-ФМ-ФМ.
В данной работе разрабатывалась космическая система связи с КИМ-ФМ-ФМ. Характер спектра сигнала с многоступенчатой модуляцией в значительной степени определяется спектром сигнала КИМ. Кодово-импульсная модуляция является наиболее распространенным методом цифрового преобразования аналоговых сигналов. При КИМ осуществляется три вида преобразований: дискретизация по времени исходного сигнала, квантование амплитуд дискретных отсчетов сигнала и кодирование. Сформированные при дискретизации отсчеты преобразуются в группы кодовых символов. При формировании сигнала с трехступенчатой модуляцией сигналом КИМ манипулируется по фазе поднесущее колебание, которым в свою очередь по фазе, моделируется несущее колебание.
цифровая радиолиния контур управление
2. Расчет и выбор основных технических характеристик системы 2.1 Определение частоты дискретизации
Под дискретизацией понимается процесс представления непрерывного сообщения U (t), заданного на интервале (0,Tc), совокупностью его значений (отсчетов) U (ti) в дискретные моменты (моменты дискретизации). При равномерной дискретизации отсчеты формируются через равные промежутки времени Тд - интервалы дискретизации. Величина, обратная интервалу, Fд=1/Тд называется частотой дискретизации.
Условия, при которых аналоговый сигнал с ограниченным спектром может быть точно представлен своими отсчетами в дискретные моменты, вытекают из широко известной теоремы В.А. Котельникова, которая для равномерной дискретизации выражается формулой:
U (t) = å U (iTд) sin 2pfв (t-iTд) /2pfв (t-iTд).
i
При этом условии аналоговый сигнал U (t) может быть восстановлен без искажений на выходе идеального фильтра низких частот, на вход которого подают отсчеты сигнала.
На приемной стороне восстановление исходного сообщения осуществляется с помощью оператора восстановления
n
B (U1,….,Un) =U (t) = åUiХi (t),
i=1
где Ui=U (ti) - выборки или отсчеты сигнала;
U (t) - оценки исходного сообщения U (t);
Xi (t) - координатные (интерполирующие) функции.
Операция восстановление непрерывной функции по ее выборке называется интерполяцией. Эта операция должна быть основана на знании особенностей поведения функции между отдельными выборками, утерянной в результате дискретизации процесса по времени.
Опросом по Котельникову называют формирование выборок с частотой Fд=2Fm, где Fm-максимальная частота в спектре.
Для практических расчетов пользуются формулой Fд=cm*2*Fm, где cm-коэффициент запаса, который при интерполяции по Лагранжу
выбирают в зависимости от модели сигнала и порядка интерполирующего полинома. Мы
зададимся 4-ой моделью сигнала, полиномом второго порядка и приведенным показателем
верности g = 0.2%, тогда ![]()
отсюда частота дискретизации:
Fо=12.5*2*Fв=12.5*2*10=25 кГц
2.2 Определение разрядности квантователя
Пусть в результате дискретизации получена непрерывная последовательность отсчетов Х (nDt). Для передачи по цифровому каналу связи каждый отсчет квантуется до конечного множества значений.
Этапы процесса представления сообщений:
1. Дискретизация
2. Квантование
3. Кодирование
Обычно для кодирования квантованных отсчетов используется двоичная последовательность.
С помощью В - разрядного кодового слова можно представить ![]() уровней.
уровней.
Определим, как зависит отношение с/ш квантователя от В:
пусть ![]()
![]()
Динамический диапазон
![]()
![]()
где е (n) - шум квантования е (n) £ d/2
Модель шумов квантования:
1. шум квантования - стационарный белый шум
2. шум квантования некоррелирован с входным сигналом
3. распределение шума квантования равномерное в пределах d/2
![]()
считаем, что ![]() (сигнал согласован с апертурой квантователя)
(сигнал согласован с апертурой квантователя)
следовательно: ![]()

получаем: ![]() (2.1)
(2.1)
Определим отношение с/ш (q), при котором достигается вероятность ошибки на символ Рош=10-6.
Кодирование сообщений в радиосистемах может быть использовано для повышения:
1) достоверности принятых сообщений,
2) помехоустойчивости радиолиний с целью снижения мощности передатчика. Кодирование сообщений для указанных целей называется помехоустойчивым, в отличие от других видов кодирования, применяемых для решения задач (формирования адресов, сигналов синхронизации и др.), а также при устранении избыточности сигналов источников сообщений.
Пусть цифровое сообщение кодируется двоичным (n,k) - кодом, где n - общее число символов, k - число информационных символов.
Эквивалентная вероятность ошибки:
рэ= (dx Mбл /2n) [1 - Ф (2Ебdxk / nN0) 1/2], (2.2)
где Еб/N0=Pcto/N0; Еб - энергия сигнала, затрачиваемая на один бит информации; Pc - мощность принимаемого сигнала; to - длительность одного информационного символа, поступающего на вход кодера канала связи; dx - кодовое расстояние между рассматриваемыми символами; Mбл - число ближайших сигналов на расстоянии d от принимаемого сигнала; N0 - спектральная плотность белого шума. Интеграл вероятности можно аппроксимировать экспоненциальной функцией. В широкой области значений р<<1 вероятность ошибки хорошо аппроксимируется выражением
p=0,5 [1 - Ф (22x) =0,1exp (-x2).
Тогда из (2.3) получим
рэ= (dxMбл/10n) exp (-Eбdxk/nN0).
Отсюда Ln (10рэ) =Ln (dxMбл/n) - Eбdxk/nN0 или
Еб/N0= (Ln (dxMбл/n) - Ln (10рэ)) /dx (k/n).
Эта формула является основной при оценке помехоустойчивости различных кодов. Для кодов без избыточности и противоположных сигналов (с фазовой манипуляцией на 1800) пологая p=рэ, можно записать: p=0,5 [1 - Ф
(21/2h0)] =0,1exp (-h02);
Ln (10p) = h02,где h02 = Еб/N0 - требуемое отношение энергии сигнала на 1 бит к спектральной плотности шумов для двух противоположных сигналов.
Таким образом, для р=10-6 получим:
h02= - Ln (10*10-6) =11,5.
Обозначим полосу частот, занимаемую спектром сигнала, через Dfэ (ширина спектра сигнала). Тогда h02можно представить в виде:

где Бс =Df э * t0 - база сигнала, а (Рс/Рш) вх - отношение средней мощности сигнала к средней мощности шума на входе приемника, взятое в полосе частот Df э.
Для простых сигналов Бс = 1, следовательно: q = (Рс/Рш) вх = h02
Для расчетов увеличим это значение на 30 %: q = 11.5 + 30 % = 15
Будем считать приемлимым такой шум квантователя который в 4 раза меньше, чем шумы на входе приемника, следовательно: q` = 4 * q = 60. Подставляя это значение в формулу (2.1) с учетом D = 20 dB = 10 раз, получаем:
![]()
2В
60 * 100 / 3 = 2
![]()
Таким образом выбираем разрядность квантователя: В = 5 разрядов
2.3 Выбор группового сигнала и расчет его параметров
На основании расчетов, приведенных в пункте определение частоты дискретизации, определим длительность интервала времени, в течение которого необходимо передать информацию о текущем отсчете входного сигнала. Выберем синхронный метод передачи с кадровой синхронизацией. Чтобы на приемной стороне мы могли обработать информацию требуется знать момент времени ее появления. Для этого в начале канального сигнала (кадра) размещается так называемый синхросигнал, который отличается от информационного сигнала. Таким образом кадр состоит из двух частей: сигнала синхронизации и информационного сигнала:
Тк=Тс+Ти,
где Тк - длительность канального сигнала; Тс - длительность синхроимпульса; Ти - длительность информационного сигнала
Причем Тк=1/Fo=1/25*103=4*10-5 сек. = 40 мкс.
Имеем 10 каналов, количество элементарных передаваемых символов в каждом канале равно числу уровней квантования В = 5, Т.о. количество элементарных символов в информационном сигнале: Nи = 5*10 = 50. В качестве синхрослова выберем сложный сигнал (составной), в этом случае для уменьшения вероятности ложного срабатывания системы кадровой синхронизации необходимо или выбирать длительность синхросигнала ³ 1/2 Ти или вводить в информационный сигнал запрещенные комбинации, что сильно усложняет аппаратуру. В нашем случае Ти / 2 =12.5, поэтому выберем синхронизацию по кадрам с помощью тринадцатиразрядного кода Баркера. Коды Баркера являются наилучшими в своем классе. АКФ этих кодов имеет узкий центральный пик и минимальный уровень боковых лепестков = 1/N, где N - значность кода.
Количество элементарных символов в кадре:
N =Nс + Nи = 50 + 13 = 63 (шт.)
Длительность элементарного символа:
t = Тк / N = 4 0*10-6/ 63 @ 6.35*10-7=0.635 мкс.
Тактовая частота: fт = 1/t = 1.575*106 Гц =1.6 МГц
В первом приближении ширина спектра КИМ-ФМ-ФМ определяется шириной главного лепестка:
Df = 2 * (1/t) = 2 * 1/1.6*106 = 3.16*106 Гц = 3.16 МГц
Вид группового сигнала:

2.4 Расчет энергетического потенциала
Энергетическим потенциалом радиолинии называется отношение средней мощности сигнала к спектральной плотности шума, пересчитанное ко входу приемника.
В задании курсового проектирования задана линия с расстоянием между приемником и передатчиком 200 км. Зададимся, что это линия Земля - управляемый объект. Линия связи подобного типа предназначена для передачи различных команд с пункта управления на борт беспилотного летательного аппарата. Достоверность приема таких команд должна быть весьма высокой, а допустимая вероятность ошибки принятой команды составляет 10-5-10-6 и менее.
Данные, необходимые для расчета:
Расстояние между приемником и излучателем r = 200 км.
Длина волны l = 3 см.
Частота f = C / l = 10 ГГц
Наземная передающая антенна параболического типа диаметром 1м.
Бортовая антенна: площадь 0,18 м2; антенна всенаправленная (D = 1)
пороговое отношение С/Ш = hо2 = - Ln (10*10-6) = 11,5 (см. П 2.2)
длительность элементарного символа: t = 0.18мкс (см. П 2.3)
Эквивалентная шумовая температура бортового приемника: Тэ = 1000 К; Л: [3] Расчет взят из Л: [3]
В соответствии с известным уравнением дальности связи мощность сигнала на входе приемника определяется выражением:
Рс вх = Ризл * gЕ * G * Sэ / 4pr2 (2.3)
где Ризл - средняя мощность, излучаемая передатчиком
G - КНД антенны передатчика
Sэ - эффективная площадь приемной антенны
r - расстояние между передатчиком и приемником
gЕ - коэффициент, учитывающий потери энергии сигнала в среде за счет поглощения:
gЕ = exp ( - 0.23ar); для l = 3 см. a = 0.15 dB/км
Т.о. Рс вх = Ризл * G * Sэ / (4pr2) * exp ( - 0.23ar) (2.4)
Если основными помехами в линии связи являются внутренние флуктационные шумы и другие случайные помехи шумового типа, то пересчитав эти помехи ко входу приемника, можно получить результирующую спектральную плотность помех на входе в виде:
![]() (2.5)
(2.5)
где Noi - спектральная плотность случайной помехи i - го вида, пересчитанная ко входу приемника
Мощность всех помех на входе приемника, определяемая в полосе частот Dfэ занимаемой спектром сигнала, равна
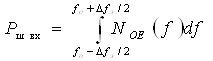 (2.6)
(2.6)
где fо - частота несущей
Выражение (2.6) можно представить в виде
![]() (2.7)
(2.7)
В простейшем случае, когда основной помехой являются только внутренние флюктуационные шумы приемника с равномерной спектральной плотностью No, мощность помехи на входе (при согласованном входе) равна
Рш вх = No Dfэ = к Тэ Dfэ (2.8)
где к = 1,38*10-23 Дж/К - постоянная Больцмана
Тэ - эквивалентная шумовая температура входа.
С учетом выражений (2.4) и (2.7) отношение средней мощности сигнала к средней мощности шума на входе приемника определяется формулой:
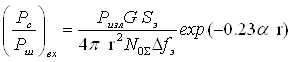 (2.9)
(2.9)
Это выражение определяет фактическое отношение С/Ш на входе приемника при известных параметрах линии связи. Пусть для того, чтобы обеспечить требуемую вероятность ошибки при передаче одной двоичной еденицы информации, необходимо иметь энергетическое отношение С/Ш:
h02 = Е0/N0S = (Рс/Рш) вх * t * Dfэ (2.10)
Тогда требуемое отношение С/Ш на входе приемника:
(Рс/Рш) тр = U h0 2/t Dfэ (2.11)
U - коэффициент запаса, выбирается от 2 до 10
зададимся U = 10
Для того чтобы линия связи обеспечивала передачу информации с помехоустойчивостью не ниже заданной, необходимо выполнить условие:
(Рс/Рш) вх ³ (Рс/Рш) тр (2.12)
Приняв во внимание (2.9), (2.11) и (2.12), имеем:
 (2.13)
(2.13)
Определим требуемую мощность передатчика:
Sэ = Sпр = 0.18 м2 - эффективная площадь приемной антенны (D = 1)
КНД передающей антенны
G=ha (pDп/l) 2, где
Dп=1м - диаметр передающей антенны
ha - КИП (коэффициент использования площади) - коэффициент учитывающий эффективность использования площади раскрыва антенны (0,55 для параболической)
G=0,55 (3,14*1/0.03) 2 = 6025; G = 38 дБ.
Мощность передатчика:
Рпер * 3.911 * 104 ³ 1.15 * 106
Рпер ³ 1.15 Вт, Возьмем Рпер = 5 Вт.
2.5 Выбор структурной схемы передатчика
Передаваемые аналоговое сигналы через коммутатор, подаются на АЦП, в котором они преобразуются в цифровой код. Каждому аналоговому сообщению соответствует свое кодовое слово. Все кодовые слова имеют одинаковую разрядность (8). При заданном динамическом диапазоне 10 дБ можно применять восьмиразрядное линейное квантование. С помощью преобразователя кода (регистр) параллельный код преобразуется в последовательный. Все слова от источников сообщений образует кадр. Для определения в приемнике начала кадра в него вводится в синхрослово (выбираем семиразрядный код Баркера). Объединение синхрослова и кодовых слов происходит в сумматоре. Далее сигналы поступают на фазовый манипулятор в котором манипуляция фазы происходит по закону ОФМ. Сформированным фазоманипулированным сигналом осуществляется фазовая модуляция несущего колебания. С помощью системы синхронизации происходит управление работой передающей части радиолинии. Подключение аналоговых сигналов U1 (t),U2 (t) ………U5 (t) к АЦП происходит с периодом, который определяется частотой процессов U,U2……U5 (fв=5 Гц.). Система синхронизации управляет также работой регистра и вырабатывает также работой регистра и вырабатывает запускающий импульс по которому формируется код Баркера, т.е. синхрослово.
2.6 Структурная схема приемника
На выходе фазового детектора высокочастотной части приемника формируется фазоманипулированный сигнал на поднесущей частоте fпод т.е. сигнал с ОФМ. После УПЧ иФД2 формируется последовательность прямоугольных импульсов далее поступающих на устройство сравнения (УС) и элемент памяти (ЭП) которые используются для распознавания кода. Управляет работой схема посимвольной синхронизации, которая вырабатывает периодическую последовательность импульсов (меандр.) тактовой частоты. В данном приемнике используется метод когерентного приема сигналов с ОФМн т.к. некогерентный прием может осуществляться только при скорости передачи не более 200 бод ввиду того, что очень трудно реализовать кинематические фильтры на большие частоты.
Выделенная последовательность импульсов далее поступает на триггер далее на дешифратор кода Баркера после чего на регистр преобразующий последовательный код в параллельный, далее на ЦАП, который преобразует код в выборку соответствующей амплитуды далее на селектор каналов.
Управляет работой ЦАП, СК и дешифратора пересчетная схема, задача которой заключается в разрешении и запрещении работы ЦАП, регистра и СК по приходу кадровой синхронизации (импульс с дешифратора) и пересчет импульсов строчной синхронизации в импульсы канальной.
2.7 Описание функциональной схемы передатчикаВ начальный момент времени из триггера на выходе логическая “1”. Тактовые импульсы через схему И3 проходят на формирователь кода Баркера и на счетчик СЧ1. С ФКБ через открытый ключ К2 код Баркера (7-разрядный) проходит на вход схемы формирования команд ОФМ (Т-триггер). В это время счетчик СЧ1 производит подсчет количества тактовых импульсов равного количеству импульсов кода. При окончании седьмого импульса в начале восьмого на выходе СЧ1 формируется импульс переполнения, который через схему И4 обнуляет СЧ1 и переключает триггер в положение логического 0. С этого момента К2 переключается на второй вход, через схемы И1 и И2 импульсы синхронизации поступают на К1 и АЦП, а схем И3 запрещает их поступление на ФКБ. СЧ2 нужен для подсчета количества тактовых импульсов равного количеству импульсов кода и на 41 импульсе выдает импульс переполнения, который переводит триггер в положение “1”, которая обнуляет СЧ2 и весь цикл формирования кадра повторяется снова.
Т - триггер формирует из потока “0” и “1” поток по закону если “0” то на выходе триггера скачок если 1 то сигнала нет. Далее происходит манипуляция фазы по полученному закону.
2.8 Описание функциональной схемы приемника.После каскадов ВЧ и ФД1 и УПЧ мы получаем сигнал КИМ-ОФМ, который поступает на ФД2 УФОН которого построен по схеме Пистолькорса. Это наиболее простая схема УФОН приемлемая в данном случае т.к. ОФМ нечувствительна к обратной работе фазового детектора. После ФД2 и УО получаем последовательность прямоугольных импульсов нашего кода обработанного законом ОФМ. Схема 1 представляет собой сравнивающее устройство, а два D-триггера являются элементом памяти. Они включены по схеме ведущий-ведомый тактовая частота подаваемая на триггера равна половине частоты посимвольной синхронизации.
Далее сигнал представляющий наш кадр поступает на оптимальный фильтр кода Баркера, состоящий из линии задержки и сумматора, который при определении кода выдает на выходе импульс 1 длительностью t0 (длительность одного символа) сумматор построен на жесткой логике по принципу n из к (6 из 7) верхних символов кода.
Импульс с выхода сумматора приходит на схему запуска которая разрешает работу сдвигового регистра и счетчиков СЧ1 и СЧ2. СЧ1 формирует импульсы с частотой fт/8 которые разрешают считывание параллельного кода 1-го из каналов в ЦАП формирующего 1 выборку длительностью t0 за время одного канала. СЧ2 производит подсчет каналов и выводит их номер в двоичном коде, которым управляются коммутаторы КК1 И КК2 старший разряд (А3) СЧ2 используется для выбора коммутатора.0 работает КК1 1 работает КК2. С выходов коммутаторов поступают на фильтры НЧ которые служат для выделения канальных сигналов U1,U2…U5. Такая схема коммутации позволила применить 1 сдвиговый регистр и один ЦАП.
2.9 Схемная разработка системы кадровой синхронизации
В цифровых командных радиолиниях необходимо применять кадровую синхронизацию. В качестве сигналов кадровой синхронизации часто используются составные сигналы, причем выделение этих слов в приемнике осуществляется с помощью пассивного согласованного фильтра. Напряжение на выходе согласованного фильтра воспроизводит автокорреляционную функцию синхронизирующего сигнала. Для уменьшения ошибок, возникающих при обнаружении синхронизирующего сигнала и определении его временного положения, автокорреляционная функция должна иметь узкий центральный пик и малый уровень “боковых” выбросов. Подобным свойством обладают ряд широкополосных сигналов, в том числе сигналы, сформированные на основе некоторых двоичных кодов.
В данной работе выбран синхронизирующий сигнал в виде 7-значного кода Баркера, его нормированная автокорреляционная функция показана на рис.
Функциональная схема устройства декодирования кадрового синхронизирующего сигнала
Принятый сигнал поступает на линию задержки. Расстояние между отдельными отводами этой линии соответствует длительности элементарных импульсов кода. Максимальное время задержки синхронизирующего сигнала равно полной длительности этого сигнала Тз. Сигналы которые снимаются с отводов линии задержки, поступают на сумматор. При этом часть сигналов проходит через инверторы, изменяющие полярность сигналов. Пространственное расположение отводов линии задержки, к которым подключены мнверторы, воспроизводит в обратном порядке временное положение символов "0", имеющих в составе рассматриваемого синхронизирующего колового слова. Тем самым обеспечивается синхронное накопление энергии отдельных импульсов этого слова в сумматоре. К выходу сумматора подключен фильтр, который согласован с одиночным видеоимпульсом длительности.
В момент окончания принятого синхронизирующего кодового слова на выходе согласованного фильтра образуется короткий импульс значительной амплитуды, который соответствует центральному "пику" автокорреляционной функции. С помощью таких импульсов осуществляется запуск пороговой схемы предназначенной для выделения отдельных синхронизирующих сигналов.
3. Контур управления и его анализ
Радиотелемеханической системой называется совокупность устройств, предназначенных для управления состоянием и работой различных приборов и агрегатов.
В комплексах ЛА радиотелемеханические системы используются для управления бортовыми приборами и агрегатами, а также состоянием летательных аппаратов в целом. Такое управление осуществляется подачей на исполнительные устройства приборов и агрегатов (объектов управления) соответствующих команд. Команды формируются на основе контроля (измерения) некоторой в общем случае многомерной величины g (t), которая непосредственно или косвенно характеризует либо условия, в которых находился объект управления, либо текущее состояние объекта. Для осуществления такого контроля в состав радиотелемеханических систем включаются либо те или иные радиоизмерительные устройства, либо датчики - преобразователи неэлектрических величин в электрические. Формирование команд осуществляется в решающих устройствах. Которые в простейших случаях представляют собой схемы сравнения и реле, а в более сложных - счетно-решающие приборы и системы обработки результатов измерений. Команда поступает на управляемый объект через исполнительное устройство.
Различают автономные и неавтономные радиотелемеханические системы. В первых команды формируются на борту ЛА, во вторых - на пункте управления и передаются на борт летательного аппарата по командной радиолинии.
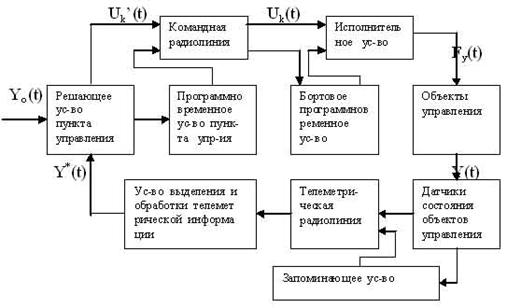
Контур управления неавтономной радиотелемеханической системы с обратной связью:

Uk’ (t) Uk (t)
Fy (t)
Yo (t)
Y* (t) Y (t)
Информация о состоянии и работе объектов управления - бортовых приборов и агрегатов - получают с помощью датчиков, устанавливаемых на борту ЛА и связанных с контролируемыми величинами g (t). Полученные с датчиков и соответствующим образом обработанные величины поступают непосредственно или через запоминающее устройство на вход телеметрической радиолинии и передается по ней на пункт управления. На пункте управления в устройстве выделения и обработки телеметрической информации получается оценка состояния объектов управления g* (t), необходимая для осуществления требуемого управления бортовыми приборами и агрегатами. Формирование команд осуществляется в результате сравнения оценки g* (t) с величиной gо (t), задающей необходимое состояние объектов управления. Сформированные команды по командной радиолинии передаются на борт ЛА и поступают на исполнительное устройство, воздействующее на объекты управления. Контур радиотелемеханического управления оказывается замкнутым. В зависимости от решаемых задач, такое управление осуществляется либо как следящее, либо как корректирующее.
4. Разработка функциональной схемы радиолинии
4.1 Некоторые сведения об используемом сигнале
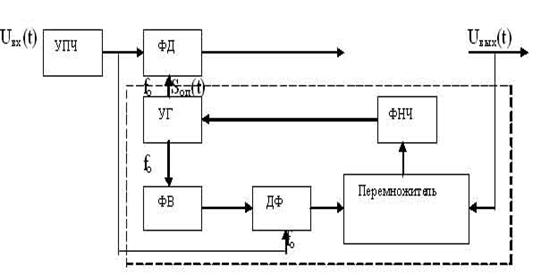
Как уже было отмечено в данной работе разрабатывалась совмещенная радиолиния КИМ-ФМ-ФМ. Интерес к цифрово передаче сообщений с помощью фазовой модуляции вызван в первую очередь тем, что согласно фундаментальным результатам теории потенциальной помехоустойчивости среди двухпозиционных сигналов противоположные сигналы, т.е. сигналы с однократной ФМ, потенциально обладают наибольшей помехоустойчивостью. Но при демодуляции простого фазоманипулированного сигнала возникает сложность в получении синхронного опорного напряжения, имеющего неизменную начальную фазу “явление обратной” работы фазового детектора. Имеется несколько методов и схем построения формирователя опорного колебания. Рассмотрим схему Костаса, обеспечивающую высокую помехозащищенность. В 1956 г. Американский ученый Д. Костас предложил схему формирования опорного напряжения для синхронного (когерентного) детектирования фазоманипулированных сигналов.
Эта схема показана на рисунке:
Влияние манипуляции фазы сигнала устраняется в ней перемножителем, на один вход которого поступает сигнал с выхода усилителя-ограничителя, а на второй - сигнал с выхода фазового детектора (ДФ) системы ФАП. По сравнению с другими схемами формирования такой способ снятия манипуляции обеспечивает более высокую помехоустойчивость схемы с флюктуационными помехами. Недостатком схемы является некоторая ее сложность, обусловленная тем, что перемножитель должен работать на постоянном токе. Это приводит к необходимости пропускания постоянных и очень медленно меняющихся напряжений, вплоть до управителя частоты. При этом входы перемножителя оказываются связанными гальванически и для их взаимной развязки необходимо применять мостовые схемы постоянного тока.
Так же, как и другие схемы, схема Костаса имеет склонность к переходу в режим "обратной работы", так как в ней также возможны два устойчивых значения начальной фазы опорного напряжения, отличающиеся на 1800.
4.2 Функциональная схема передающей части
4.3 Описание функциональной схемы передатчика
Канальные аналоговые сигналы поступают на кодирующее устройство, где преобразуются в цифровую форму. На выходе кодирующего устройства (т.1) имеется последовательность кодовых слов, представленных в последовательной форме в виде комбинации 0 и 1 и расположенных по порядку в соответствии с номерами каналов. Эта последовательность поступает на сумматор. Сюда же с генератора кадрового синхросигнала подается 13-ти разрядный код Баркера, являющийся кадровым синхросигналом. Работой кодирующего устройства и генератора кадрового синхросигнала управляет схема синхронизации, задача которой состоит в том, чтобы перед началом каждого кадра разрешать работу генератора кадрового синхросигнала и одновременно запрещать выход импульсов с кодирующего устройства. После окончания выдачи кадрового синхросигнала схема синхронизации сбрасывает генератор синхросигнала в начальное состояние, запирает генератор кадрового синхросигнала и разрешает работу кодирующего устройства. После выдачи информации о последнем канале схема синхронизации сбрасывает в начальное состояние кодирующее устройство, запрещает его работу и разрешает работу генератору кадрового синхросигнала и т.д. процесс повторяется.
На выходе сумматора имеем групповой сигнал (т.3), который далее подается на вторую ступень модуляции. На выходе второй ступени модуляции (т.5) имеем сигнал КИМ-ФМн, который далее подается на третью ступень модуляции, с выхода которой на усилитель мощности поступает сигнал КИМ-ФМ-ФМ. После усиления сигнал излучается в пространство передающей антенной параболического типа.
4.4 Описание функциональной схемы приемникаСигнал принимается приемной ненаправленной антенной и поступает на усилитель высокой частоты (УВЧ).
После усиления сигнал подается на преобразователь частоты, выполненный на смесителе СМ-1 и местном гетеродине МГ. На выходе смесителя образуется сигнал разностной частоты (т.1) являющейся промежуточной. Далее сигнал усиливается усилителем промежуточной частоты (УПЧ) и подается на фазовый детектор несущего колебания. СМ-1и УПЧ являются одновременно элементами схемы беззапросного измерения радиальной скорости, работа которой подробно описывалась в п. (4.2).
С выхода фазового детектора несущего колебания сигнал КИМ-ФМн через полосовой фильтр, отсеивающий побочные составляющие, подается на вход второго фазового детектора, образующего вторую ступень демодуляции. На второй вход этого фазового детектора подается опорное колебание с выхода схемы формирования опорного колебания, выполненной по схеме Костаса. Работа этой схемы подробно описана в п. (4.1).
С выхода второй ступени демодуляции сигнала (т.3) последовательность видеоимпульсов, образующих групповой сигнал, подается на схему распознавания символов, выполненную на интеграторе и решающем устройстве, и одновременно на схемы кадровой и тактовой синхронизации. С выхода схемы распознавания символов двоичная последовательность подается на декодирующее устройство, которое восстанавливает канальные сигналы из приходящей на него двоичной последовательности.
Работой декодирующего устройства и схемы распознавания символов управляют схемы кадровой и тактовой синхронизации. Схема тактовой синхронизации формирует импульсы с частотой равной частоте следования элементарных символов. Эти импульсы сбрасывают интегратор в начале каждого элементарного интервала, запускают решающее устройство в конце каждого элементарного интервала и управляют регистрами сдвига декодирующего устройства. Более подробно о работе и реализации схемы тактовой синхронизации будет сказано в п. V.
Схема кадровой синхронизации необходима для правильной работы декодирующего устройства. Она в начале каждого кадра сбрасывает сдвиговые регистры и разрешает работу декодирующего устройства после окончания приема кадрового синхросигнала. В конце кадра схема кадровой синхронизации разрешает работу схемам восстановления канальных сигналов. Схема кадровой синхронизации выполнена на основе оптимального фильтра для 13-ти элементного кода Баркера.
5. Разработка принципиальной схемы системы тактовой синхронизации
Выберем схему с добавлением и исключением, имеющую следующие достоинства:
· нет вмешательства в колебательный контур местного тактового генератора, следовательно его можно сделать высокостабильным.
· дискретность изменения фазы можно сделать очень небольшой величины
Недостатком схемы является то, что при передаче подряд большого количества одинаковых символов повышается вероятность выхода системы из синхронизма.
Функциональная схема системы тактовой синхронизации с добавлением и исключением:
Работа схемы:

Задающий генератор вырабатывает меандр с частотой Fзг = m * f т, далее меандр поступает формирователь, формирующий короткие импульсы. Эти импульсы поступают на схему добавления и исключения единиц, которая работает следующим образом: если в момент времени между входными импульсами приходит импульс на вход +1, то в последовательность добавляется один импульс между входными; если в момент времени между входными импульсами приходит импульс на вход - 1, то из исходной последовательности исключается один импульс. Если ни на один из входов сигнал не подан, то исходная последовательность проходит на выход без изменений. На выходе делителя, выполненного на базе счетчика, будет меандр частоты, зависящей от количества добавленных или удаленных единиц в единицу времени и дискретностью, зависящей от коэффициента деления делителя.
6. Конструкция бортового приемника
Современные воздушные летательные аппараты могут перемещаться в атмосфере с огромными скоростями, что создает для работы антенн сложные условия. При большой скорости полета наблюдается значительный аэродинамический (кинетический) нагрев корпуса летательного аппарата (ЛА). Этот нагрев в полной мере испытывают все устройства, расположенные вблизи корпуса ЛА, а в особенности антенны, так как они располагаются либо на обшивке ЛА, либо под обшивкой ЛА.
При проектировании антенн для ЛА, в особенности при выборе места их размещения на корпусе ЛА, необходимо учитывать, что при достаточно большой электронной концентрации плазма может оказать на работу антенн сильное влияние, вплоть до полного нарушения работы радиолинии.
Сильное воздействие набегающего потока воздуха из-за большой скорости полета современных ЛА является причиной значительных механических усилий, испытываемых отдельными частями корпуса летательного аппарата, в том числе бортовой аппаратурой и антеннами. Эти усилия особенно велики в том случае, когда антенна является наружной. Механическое воздействие воздушного потока заметно увеличивается с ростом скорости полета и существенно зависит от формы и размеров антенн. Однако даже в том случае, когда антенна является не выступающей, на нее, тем не менее, передаются значительные механические усилия, испытываемые другими частями корпуса ЛА.
Щелевые антенны являются одним из типов антенн, наиболее часто применяемых в ЛА. В радиолиниях телеметрии и командного управления обычно требуется ненаправленное излучение приемных антенн, поэтому находят применение круговые решетки щелей, расположенные по периметру цилиндрической части корпуса ЛА.
При разработке многощелевой антенны необходимо решить вопросы о способе питания щелевых излучателей, об их ориентации относительно продольной оси ЛА и общем числе излучателей. Остановимся кратко на этих вопросах.
Применяются два способа питания излучателей. Первый из них состоит в том, что прямоугольный волновод сворачивается вокруг широкой или узкой стенке в кольцо и в наружной стенке, находящейся на уровне обшивки ЛА, прорезаются щели, образующие таким образом круговую решетку излучателей. Наружная стенка закрывается диэлектрическим защитным слоем.
Применение кольцевой волноводно-щелевой антенны наталкивается на очевидные конструктивные сложности. Если расположить волновод под обшивкой ЛА, так чтобы его наружная поверхность вплотную прилегала к внутренней поверхности обшивки, то в ней нужно по периметру корпуса прорезать большое число щелей, что значительно ослабит механическую прочность корпуса. Можно не нарушать целостности обшивки, предусматривая в ней паз, в котором с наружной стороны уложен кольцевой волновод рис.5:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Рис. 5.
Это, однако, усложняет конструкцию самого корпуса ЛА. При большом диаметре ЛА волноводно-щелевая антенна имеет значительный вес, что также является недостатком.
Достоинством волноводно-щелевой антенны является возможность получения в азимутальной плоскости диаграмм направленности без глубоких провалов, для этого необходимо расположить соседние щели достаточно близко друг от друга.
В виду указанных выше недостатков кольцевой волноводно-щелевой антенны преимущественно применяется другой способ питания щелевых излучателей. Он состоит в том, что по периметру корпуса ЛА размещаются несколько одиночных излучателей, которые питаются с помощью делителей мощности, направленных ответвителей и других волноводных узлов, а также разветвленной фидерной (волноводной) системы питания.
Данная схема питания обладает достаточной гибкостью, так как выбором длин фидеров (волноводов) и соответствующих делителей мощности можно получить разнообразные амплитудно-фазовые распределения полей в щелях.
Рассмотрим теперь вопрос об ориентации щелей. Преимущественно применяются поперечные или продольные щели. Следует учитывать, что прямолинейная щель в Е-плоскости имеет широкую диаграмму направленности, а в Н-плоскости более узкую диаграмму и по своей продольной оси не излучает. Следовательно чтобы антенна обеспечивала интенсивное излучение под малыми углами к продольной оси ЛА, то целесообразно применять поперечные щели. Вместе с тем, необходимо учитывать, что при одном и том же числе щелей угол перекрытия диаграммы соседних излучателей, в экваториальной плоскости, будет больше для продольных осей, чем для поперечных. С этой точки зрения также заслуживают предпочтения поперечные щели, так как благодаря направленности этих щелей в Н-плоскости зоны глубоких провалов, вызванные интерференцией полей соседних излучателей, будут более узки, чем в случае применения продольных щелей.
Теперь остановимся на конструкции самого приемника. К бортовой аппаратуре применяются очень жесткие и в тоже время противоречивые требования:
· жесткая ограниченность габаритов и массы
· ограничения в энергопотреблении
· способность работы в вакууме
· стойкость к мощным тепловым ударам
· стойкость к совместному действию вибрационных и линейных нагрузок (до 10 G)
· чрезвычайно высокая надежность
Рассмотрим климатические факторы, влияющие на бортовую аппаратуру и их последствия.
1. Повышенная температура - высыхание защитных покрытий с растрескиванием, миграция примесей в полупроводниках, изменение электрических характеристик радиоэлементов, деформация деталей.
2. Пониженная температура - изменение электрических характеристик радиоэлементов, деформация деталей, конденсация влаги.
3. Повышенная влажность - увеличение паразитных емкостей, снижение сопротивления диэлектриков, опасность термоудара.
4. Пониженное давление - снижение пробивного напряжения волноводов, печатного монтажа и др., ухудшение теплоотдачи.
5. Солнечная радиация - старение диэлектриков и разрушение покрытий.
6. Механический фактор:
а) вибрации
б) удары
в) ускорения
г) акустические шумы
При разработке приемника следует выполнять все вышеперечисленные требования с учетом влияния климатических факторов.
При выборе элементной базы следует отдать предпочтение полностью полупроводниковому варианту. В целях повышения надежности следует отдать предпочтение печатному монтажу. Из-за наличия сильных электромагнитных полей необходимо тщательно экранировать отдельные узлы приемника, особенно высокочастотную часть и УПЧ. При разработке принципиальной схемы нужно стараться использовать щадящие режимы работы активных элементов, учитывать неблагоприятные тепловые условия, применять схемотехнические решения, позволяющие снизить энергопотребление при заданных характеристиках, все намоточные узлы необходимо заливать изоляционными материалами (эпоксидной смолой). Необходимо обеспечить герметичность корпуса приемника с возможностью ремонта и обеспечить надежное его крепление на борту ЛА. В качестве подводящей линии к антеннам следует выбрать гибкий каоксиальный кабель, устройства СВЧ необходимо выполнять преимущественно в полосковом варианте.
Список литературы
1. Основы радио управления. Под. Ред.В.А. Вейциля и В.Н. Типугина М.: 1973г.
2. Пенин П.И. Системы передачи цифровой информации. /M.: "Сов. Радио"1976г.
3. Тепляков И.М., Рощин Б.В., Калашников И.Д. Радиолинии космических систем передачи информации. /М.: Сов. Радио, 1975-399с.
4. Тепляков И.М., Рощин Б.В., Фомин А.И., В.А. Вейциль. Радиосистемы передачи информации. /Радио и связь, 1982-265с.
5. Сазонов Д.М. Антенны и устройства СВЧ. /М.: Высшая школа 1998-430с.