Реферат: Методи згладжування та корекції зображень
Методи згладжування та корекції зображень
1. Методи згладжування зображень
Оператори згладжування. Якщо зображення пошкоджене широкополосним сигналом завади (шуми датчика, передачі, квантування та ін.), виникають дрібноструктурні флуктуації яскравості, які, зазвичай, можуть бути усунуті за допомогою локальних операторів згладжування (низькочастотних фільтрів). Анізотропні періодичні перекручування в зображенні, навпаки, зазвичай усуваються в частотному просторі (наприклад, ліквідація 50-герцової перешкоди в зображенні здійснюється шляхом фільтрації складової 50 Гц зі спектра).
Поряд з лінійним згладжуванням, що не забезпечує збереження контурів, що часто неприпустимо, застосовують й інші методи:
- нелінійні оператори згладжування (MINIMUM-, MEDIAN-, MAXIMUM-оператори);
- граничне згладжування;
- сигнально-адаптивні оператори згладжування;
- нагромадження зображень (усереднення декількох зображень);
- лінійну і нелінійну фільтрацію зображень у частотно-просторовій області (НЧ-фільтри, Pruning-фільтр, гомоморфну фільтрацію).
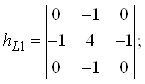
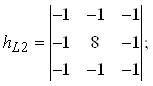
Низькочастотні оператори з усередненням. Для утамування шуму часто застосовуються фільтри, що використовують такі віконні оператори:
 ;
;  .
.
Функція
![]() здійснює
усереднення для всіх елементів,
які потрапили у вікно. За допомогою функції
здійснює
усереднення для всіх елементів,
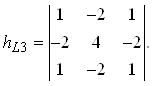
які потрапили у вікно. За допомогою функції ![]() завдяки великим
вагам підкреслюються горизонтальні і вертикальні лінії. Якщо необхідно
підкреслити діагональні лінії, доцільно застосовувати віконну функцію вигляду:
завдяки великим
вагам підкреслюються горизонтальні і вертикальні лінії. Якщо необхідно
підкреслити діагональні лінії, доцільно застосовувати віконну функцію вигляду:
 .
.
Коефіцієнт віконних функцій, що нормує, вибирається таким чином, щоб процедура заглушення шуму не викликала зміщення середньої інтенсивності обробленого зображення.
Цей лінійний
оператор усереднення обчислює в локальному вікні середню величину ![]() для
поточного елемента зображення
для
поточного елемента зображення ![]() з урахуванням стану сусідніх елементів. Кожна
точка результуючого зображення обчислюється як
з урахуванням стану сусідніх елементів. Кожна
точка результуючого зображення обчислюється як ![]() . Наприклад,
для маски розміром 3 ´ 3 (
. Наприклад,
для маски розміром 3 ´ 3 (![]() ) одержимо
) одержимо
 ,
,
а для маски 5´5 :
Недолік таких прямокутних фільтрів полягає у можливій появі помилкового зображення (aliasing), коли в зображенні є високі просторові частоти.
Істотним недоліком лінійної фільтрації зображень є те, що поряд зі зменшенням шумів одночасно відбувається розмивання контурів зображення. Це викликано тим, що всі елементи вихідного зображення обробляються з однаковим коефіцієнтом, тобто лінійні фільтри незалежні від структури елементів і тому вони не можуть визначити межу між шумовими і контурними елементами.
Щоб зменшити
розмивання зображення, доцільно використовувати метод селективного
згладжування. У ряді випадків, якщо яскравість пікселів вхідного зображення
розподілена за нормальним законом, достатньо ефективною під час проведення
попередньої обробки може виявитися сигма-фільтрація, при якій враховуються
тільки ті елементи вхідного зображення (всередині вікна), яскравість яких
знаходиться в межах ![]() . Тут Ех –математичне очікування,
а s – середньоквадратичне відхилення яскравості
пікселів зображення.
. Тут Ех –математичне очікування,
а s – середньоквадратичне відхилення яскравості
пікселів зображення.
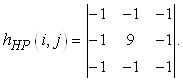
2. Підкреслення контурів
Підкреслення контурів низькочастотним оператором. Підкреслення і загострення контурів або збільшення різкості зображення відбувається внаслідок збільшення високочастотних складових сигналу, до яких відносяться не тільки компоненти контурів і меж, але і шум. Можливості реалізації цієї процедури за допомогою локальних фільтрів дуже різноманітні. Диференційний оператор, записаний для цілей обробки зображень у дискретній формі, здійснює обчислення різниці яскравостей у межах вікна. У загальній формі диференційні оператори є лінійними:
 (1)
(1)
Для загострення меж довільно орієнтованих структур потрібні ізотропні алгоритми. Вони можуть бути непарного (градієнтні оператори) або парного (оператори Лапласа) порядку. Недолік диференційних операторів – посилення шуму (високочастотних завад) через посилення високих просторових частот. Чим вище порядок диференціювання, тим сильніше оператори реагують на високочастотні перешкоди. Для зменшення цих ефектів перед використанням диференційних операторів має сенс зробити шумозаглушення. Інший шлях зменшення чутливості до шуму полягає в розробці диференційних операторів, які формують різниці усереднених величин.
Класична функція градієнта має вигляд
 (2)
(2)
Абсолютне значення функції градієнта визначається як
 (3)
(3)
а кут q дорівнює
 . (4)
. (4)
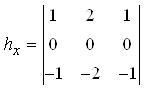
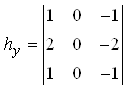
Відповідні вікна для визначення першої похідної в напрямках х і у :
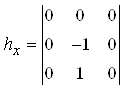 ;
; 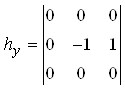 .
.
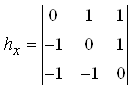
Існує багато операторів, які отримано із градієнтних і використовуються для виявлення меж. Це оператори Превіта, Собеля, ряд операторів Кірша:
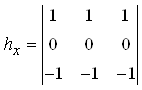 ;
; 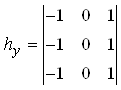
 ;
; 
;
 ;
; 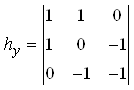
Розглянуті диференційні оператори виділяють більш сильніше вертикальні або горизонтальні лінії, тобто вони залежні від напрямку.
Іншим типом залежних від напрямку контурів операторів є так звані компас-градієнтні. Назва географічного напрямку говорить про напрямок перепаду, який викликає максимальний відгук фільтра.
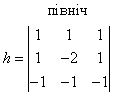 ;
; 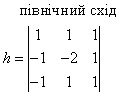 ;
; 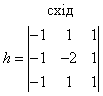 ;
; 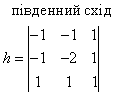 ;
;
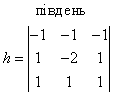 ;
; 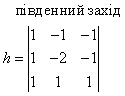 ;
; 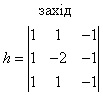 ;
; 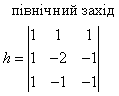 .
.
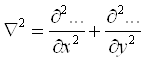
Для виявлення ліній або для фокусування зображень у багатьох випадках доцільно використовувати оператор Лапласа (лапласіан), який обчислює другу похідну функції. Для безперервних функцій він подається у вигляді
 (5)
(5)
На практиці лапласіан обчислюється за наближеною формулою
![]() (6)
(6)
Віконна функція лапласіана має такий вигляд:
Оператор Лапласа має інваріантість до повороту зображень, тобто на тому самому зображенні він дає той самий результат незалежно від орієнтації цього зображення.
Усі подані варіанти операторів мають характеристики фільтрів високих частот.
Нерізке маскування. Стосовно до електронних засобів репродукування термін маскування має умовний характер, тому що запозичено з фотографії, де означає зйомку через допоміжне зображення – маску.
На рис. 1 зображений перетин штриху оригіналу в процесі розгорнення його концентричними апертурами основного оптичного каналу зчитування і каналу нерізкого маскування
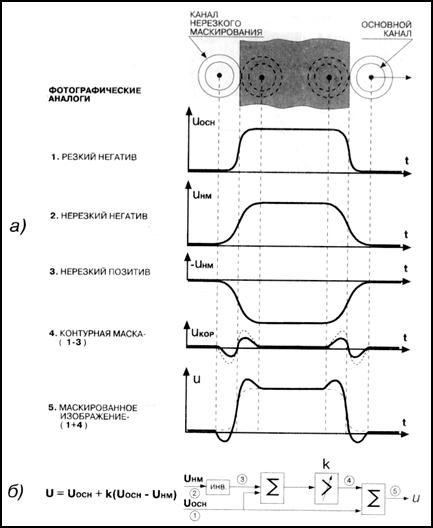
Рисунок 1 – Процес (а) і пристрій (б) електронного нерізкого маскування
Отже, на вихідному зображенні межі підсилюються, тому що до них додаються високочастотні компоненти. Тому вирахування лапласіану з вихідного зображення призводить до поліпшення фокусування останнього. Звичайно такий же ефект дає вирахування з вихідного зображення середньоарифметичної складової.
Тут забезпечується ізотропна дія, яка не залежить від орієнтації контурів, оскільки амплітуда сигналу зберігається і при нахилі контуру до напрямку розгорнення. В міру нахилу уповільнення зміни яскравості вздовж однієї з координат компенсується її зростанням вздовж іншої.
Напруга сигналу, отриманого в результаті електронного нерізкого маскування, пов'язано з вихідними сигналами основного uосн і допоміжного uнм оптичних каналів:
![]() (7)
(7)
Коефіцієнт k у цьому виразі визначає ступінь посилення сигналу корекції (uосн - uнм) і є параметром оперативного регулювання.
Нерізке маскування привносить у зображення і нову, повністю відсутню в оригіналі, інформацію. Зі світлого і темного боків межі, яка розділяє на зображенні чорне і біле поле, утворяться окантовки, значення тону яких відповідає рівням "біліше білого" і "чорніше чорного". У цьому полягає ефект нерізкого маскування.
Регульованими параметрами такої корекції є яскравість і ширина смуг окантовки, а також залежність її дії від перепаду яскравості на контурі. Ступінь маскування може бути максимальною для слабких контурів і зовсім незначною для контурів повного контрасту. У ряді випадків корекція може давати лише одну смугу окантовки (тільки з боку світлого або темного), наприклад, для полегшення такої технологічної операції, як усунення фону від силуету за допомогою ручної або електронної ретуші.
3. Покращення розпізнавання деталей
Для відтворення і подання точок, ліній і растрів у зображенні важливі високі частоти, особливо в області 0,2...0,5 від частоти дискретизації (тобто частоти Найквіста). Але, саме ця область послаблюється кінцевими розмірами апертури зчитування. Підвищення високочастотних складових хоча і поліпшує розпізнавання деталей, але підсилює шум. Можливий варіант частотної характеристики фільтра (одновимірного) для такої задачі наведений на рис. 2. Вона робить узагальнену реставрацію без урахування специфічних властивостей датчика зображення.
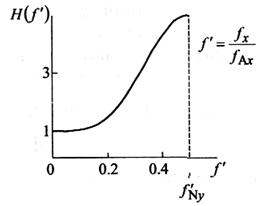
Рисунок 2 – Частотна характеристика фільтра для поліпшення розпізнавання дрібних деталей
Проста реалізація такого фільтра в просторовій області може бути такою:
LoG-оператор Марра-Хілдрета. Це лапласіан оператора Гаусса, згладжує функцію зображення за допомогою гауссової характеристики і диференціює межі за допомогою оператора Лапласа. У безперервній версії він описується сукупністю рівнянь:
![]() ;
;
 ; (8)
; (8)
 .
.
де х, у – ортогональні
відстані до центральної точки фільтрації; ![]() – дисперсія.
– дисперсія.
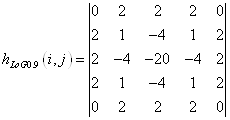
Розміри віконних функцій визначаються
значенням дисперсії. Для дисперсії ![]() :
:
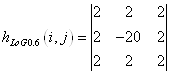 ;
;
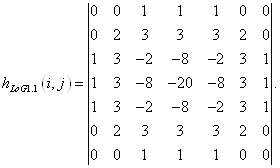
для дисперсії ![]() :
:
 ;
;
для дисперсії ![]() :
:
Корекція структурних властивостей зображення. Корекція структурних властивостей зображення розділяється на:
– корекцію різкості;
– корекцію шумів.
Корекція різкості зображення в системі поелементної обробки може здійснюватися двома методами: апертурним і програмним. Апертурний метод включає корекцію різкості зображення за методом нерізкого маскування, при цьому корекція виконується безпосередньо під час сканування зображення.
Вибір параметрів нерізкого маскування залежить від семантики оригіналу і від коефіцієнта масштабування. Чітких рекомендацій з цього питання не існує, і вибір цих параметрів залежить від досвіду оператора. Звичайно рекомендується, щоб параметр радіуса дорівнював роздільній здатності під час сканування, вираженій в пікселях, діленій на 200.
Важливим фактором є вибір каналу, на якому проводиться нерізке маскування. Не рекомендується здійснювати маскування на всіх каналах одночасно: під час неприведення такого зображення формуватиметься структурний шум зображення. Під час роботи в колірному просторі Lab нерізке маскування доцільно проводити на каналі L (за світлістю).
4. Урахування шумових властивостей структури оригіналу і корекція шумів зображення
Шуми можуть бути випадкові аналогові, імпульсні і детерміновані.
Випадкові аналогові шуми виникають, як правило, через гранулярну структуру фотографічного матеріалу, на якому виготовлений оригінал. Для усунення таких шумів застосовуються методи фільтрації згладжування. Необхідно пам'ятати, що використання таких фільтрів може призводити до втрати різкості зображення, тому що усереднюється не тільки шумова структура, але і пікселі, що формують межу зображення. У деяких випадках доцільно після процедури згладжування додатково здійснювати процедуру нерізкого маскування.
Під випадковими імпульсними шумами розуміють відносно рідко розташовані одиничні дефекти, типу подряпин, порошин. Стосовно до них процедура згладжування звичайно неефективна через те, що розміри таких дефектів достатньо великі. Для усунення таких дефектів застосовуються рангові фільтри. У такий спосіб можна усунути відносно дрібні дефекти типу подряпин і пилу.
При більш великому імпульсному шумі необхідно використовувати напівавтоматичне ретушування, у якому усунення дефектів зображення здійснюється шляхом заміни дефектних пікселів на пікселі з їхнього найближчого оточення.
Прикладом детермінованих шумів зображення є растрова структура зображення, якщо оригіналом є поліграфічний відбиток. Зчитування растрового зображення може призвести до небажаної взаємодії растрової структури зображення з новою растровою структурою, яка генерується у процесі фотовиведення.
Можливі два шляхи вирішення цієї проблеми:
1. Усунення растрової структури оригіналу в процесі сканування й обробки. Для цього використовуються методи згладжування. Недоліки такого усунення:
а) втрата різкості зображення;
б) внаслідок різних кутів повороту растрових структур зображення для різних фарб, повне узгодження апертури дерастрування і растрової структури не відбувається і неминучі залишкові флуктуації в зображенні (муар).
2. Зчитування растрової структури з її повним збереженням. В результаті отримують під час зчитування три растрових кольороподільних зображення зі збереженням растрової структури. Для цього необхідно зчитувати з високою роздільною здатністю, що складає значні труднощі.
Оригінал може містити зображення, у якому є періодична структура. Взаємодія цієї структури зі структурою поліграфічного растра може призводити до шумів типу муару. Іноді ця взаємодія буває досить інтенсивною і добре помітною.
Для усунення або зниження таких шумів можливі кілька шляхів:
1. Застосування растра з нерегулярною структурою.
2. Якщо структура має сильну ахроматичну складову, то є доцільним інтенсивне використання GCR і потім вибір кутів повороту растра, можливо нестандартних, які дають менше муароутворення для даної структури.
3. Зменшення масштабу зображення.
4. Зниження різкості зображення і навіть додавання шумів відповідними фільтрами обробки.
Крім шумів, що пояснюються об'єктивними причинами (шуми, що є в оригіналі) можливе виникнення шумів у самому процесі репродукування. Такими шумами є шуми квантування.
Перетворення однієї растрової структури в іншу може бути причиною муароутворення. Саму растрову структуру зображення і її відтворення також можна розглядати як шуми.
Шуми другого порядку пов'язані з нестабільністю відтворення растрової структури. Така нестабільність відтворення залежить від умов проведення процесу, від структури растра, зокрема від периметра растрових точок, від їхньої форми, і звичайно більш помітна для растрових точок, що мають великий периметр і більш інтенсивну високочастотну складову. Якщо точка квадратна, то кути вже несуть високочастотну інформацію, а вони більш піддані шумовим впливам.
піксель цифровий зображення мережа
5. Геометричні перетворення в системі поелементної обробки зображення
Масштабне перетворення може здійснюватися безпосередньо в процесі сканування, а також у процесі обробки підготовленого файла з високою роздільною здатністю.
У процесі перетворення на етапі сканування формується піксель, розмір якого обраний відповідно до масштабу остаточного зображення. Тому масштабне перетворення зводиться до збільшення розміру пікселя відповідно до необхідного масштабу.
Складніша ситуація під час масштабування зображення, записаного у вигляді цифрового масиву. У цьому випадку необхідно зробити операцію масштабування шляхом додавання або відкидання пікселів. Якщо збільшення виконується в кратну кількість разів (наприклад, в 2 рази), то кожен піксель або просто подвоюється, або виконується більш складне перетворення з інтерполяцією значень пікселів для одержання проміжних значень, що згладжують переходи.
Зі збільшенням або зменшенням зображення не в цілу кількість разів збільшення зображення здійснюється шляхом додавання або відкидання додаткових пікселів у рядку. Для збільшення на 10% подвоюється кожен десятий піксель, для зменшення на 10% – відкидається кожен десятий піксель. Це може призводити до втрати деталей, хоча це не занадто помітно.
Процедура масштабування цифрового масиву є небажаною, бо може бути джерелом додаткових шумів зображення. Масштабне перетворення краще здійснювати під час сканування.
Основне питання, яке виникає під час зміни масштабу зображення, полягає у визначенні умов, при яких така заміна не супроводжується втратою інформації. Втрати відсутні, якщо відновлено безперервний сигнал у проміжках між вузлами, в яких значення сигналу відомі. Інакше, задача полягає у двовимірній інтерполяції сигналу. Її вирішення випливає з аналізу спектральних властивостей безперервного і дискретного зображень.
Умовою точного відновлення зображення в проміжках між відліками служить використання всіх відліків дискретного зображення. Це не завжди зручно, часто потрібно відновлювати сигнал у локальній області, спираючись на невелику кількість наявних дискретних значень. Тоді можна застосовувати наближене відновлення за допомогою різних функцій, що інтерполюють. На практиці найчастіше зустрічаються декілька методів інтерполяції зображень.
Метод визначає, як обчислюється значення поточного пікселя в залежності від розміру околу під час масштабування:
– метод “найближчого сусіда”: вихідному пікселю привласнюється значення одного вихідного пікселя околу, без урахування значень сусідніх пікселів. Цей метод в основному використовується для перетворення індексованих зображень;
– білінійна інтерполяція: значення вихідного пікселя – це зважене усереднення найближчого 2´2 околу вихідного пікселя;
– бікубічна інтерполяція: значення вихідного пікселя – це зважене усереднення найближчого 4´4 околу вихідного пікселя.
Кількість пікселів в околі впливає на складність обчислень. Тому білінійна інтерполяція більш тривала, ніж метод “найближчого сусіда”; бікубічна – більш тривала, ніж білінійна. Однак бікубічна дає більш точний результат, тому під час вибору методу інтерполяції завжди потрібно шукати компроміс між часом обробки і якістю зображення.
Описані процедури використовуються для зображень у градаціях сірого. Для індексованих зображень використовують метод “найближчого сусіда”, а низькочастотна фільтрація не застосовується, тому що для даного типу зображень вона не ефективна.