Дипломная работа: Проектирование рабочего оборудования одноковшового экскаватора
1. Введение
В настоящее время в парке строительных одноковшовых экскаваторов в нашей стране и за рубежом преобладают гидравлические машины с жесткой подвеской рабочего оборудования. Широкое распространение гидравлических экскаваторов обусловлено неоспоримыми преимуществами гидрообъемного привода перед приводом с механической трансмиссией и гибкой подвеской рабочего оборудования, в первую очередь, простотой кинематических связей между источниками и потребителями энергии, способностью простыми средствами преобразовать вращательное движение первичного двигателя в поступательное движение конечного звена исполнительного механизма, способностью реализовать большие усилия на рабочих органах при минимальных размерах передаточных устройств, возможностью силового воздействия на рабочие органы, как в прямом, так и в возвратных направлениях. Эти преимущества обеспечили гидравлическим экскаваторам высокую эффективность, в частности, более низкую чем у канатных экскаваторов металлоемкость.
Строительные гидравлические одноковшовые экскаваторы предназначены для разработки грунтов до 4 категории включительно без их предварительного разрыхления при отрывке котлованов, траншей, каналов, дорожных кюветов и других выемок, разработке резервов для отсыпки насыпей, а также разработке карьеров строительных материалов. Они могут также разрабатывать более прочные грунты, включая мерзлые и скальные, после их разрыхления другими средствами. Эти машины широко используют в промышленном, гражданском, дорожном, аэродромном, трубопроводном, гидротехническом и других видах строительства, а также в промышленности строительных материалов.
2. Расчетная часть
2.1 Определение размеров базовой части гусеничного экскаватора
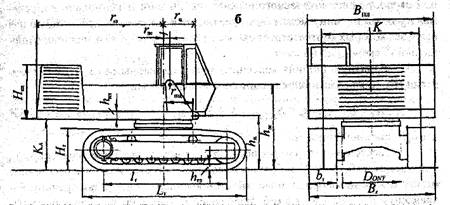
Рис. 1. Схема размеров базовой части одноковшового экскаватора
Из размеров, определяющих опорную поверхность гусеничной тележки (колея К, ширина башмаков гусеничной цепи bГ и длина опорной поверхности гусениц lГ), наиболее значимым является колея К, в числе прочих факторов определяемая условиями размещения в межгусеничном пространстве опорно-поворотного устройства (ОПУ), а также формирующая габаритную ширину экскаватора - один из основных размеров, контролируемых при перевозке экскаватора на трайлере и по железной дороге. Колею К (м) назначим по аналогии с существующими экскаваторами. На основе статистической обработки данных 35 экскаваторов со стандартными башмаками (с минимальной опорной поверхностью) фирмы "Caterpillar" для этого размера получена корреляционная зависимость:
![]() , м,
, м,
где mЭ - эксплуатационная масса экскаватора, т. Интервал значений коэффициента пропорциональности соответствует массам экскаватора mЭ = 14…25т. Для промежуточных масс здесь и далее этот коэффициент следует определять интерполированием.
Для проектирования исходя из заданных параметров экскаватора примем массу экскаватора mэ = 24.2т.
Из этого следует, что значение колеи будет равно:
К = 11.1 · 24.20.23 = 2.309 м
Окончательно примем значение К = 2.5 м
Два других размера (bГ и lГ) необходимо назначить, чтобы среднее давление гусениц на грунт Pср (кПа) не превышало заданного допускаемого значения (Pср) (кПа):
Pср =  , кПа,
, кПа,
где GЭ - сила тяжести экскаватора (GЭ = mэ g =242 кН); (Pср)=44 кПа;
g - ускорение свободного падения (g = 9.81 м/с2). Для удобства расчета примем значение свободного падения приблизительно равным 10 м/с2.
Ориентировочно для гусениц с основными башмаками (для работы на грунтах средней и повышенной несущей способности - гусеницы с минимальной опорной поверхностью) можно принять:
bг = (0.23...0.34)K = 0.34 · 2.5 = 0.85 м
Окончательно примем bг = 0.8 м.
В случае гусениц с увеличенной опорной поверхностью этот размер следует увеличить на 30 - 50%. При необходимости может быть также откорректирована колея К, Окончательно размер bГ следует округлить до значения, кратного 50 мм.
Базу lГ определим из формулы:
|
|
Принимаем значение lГ = 3.83 м, по конструктивным соображениям.
Заметим, что при малых значениях базы lГ может оказаться недостаточной продольная устойчивость экскаватора, при больших же значениях уменьшается допускаемая по условиям безопасности область подземной части рабочей зоны.
На стадии предварительных расчетов решение можно считать удовлетворительным, если отношение базы к колее не выходит за пределы:
1.3 < lГ / К< 1.7
![]()
В нашем случае условие выполняется, так как:
![]()
Определив значение lГ и bг определим значение Pср, м:
![]()
Условие выполняется, так как Pср = 39.5 (кПа) не превышает заданного допускаемого значения (Pср) =44 (кПа). Все другие размеры гусениц назначают соответственно модульным группам (Таблица 2).
Таблица 2. Размеры модульных гусеничных тележек тракторного типа цевочным зацеплением гусеничных пеней, мм

При этом габаритную высоту HГ (м) и высоту НО (м) оси ведущей звездочки принимаем как предварительные. Их уточняют следующим расчетом. Размеру НО соответствует диаметр ведущей звездочки, измеренный по осям шарниров гусеничной цепи (рис. 2).
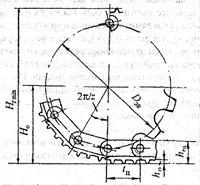
Рис. 2. Схема размеров в узле ведущей звездочки
DЗВ=2(НО – hГЦ+h 'ГЦ) = 2(0.46-0.1405+0.059) = 0.757 м,
где HО = 0.46 м - высота оси ведущей звездочки;
HГ = 0.93 м - высота гусеницы;
tЦ = 0.17105 м - шаг гусеничной цепи;
hГЦ = 0.1325 м - высота гусеничной цепи (м);
h 'ГЦ = 0.059 м - расстояние от внутренней поверхности до осей шарниров;
hГЗ = 0.0253 м – высота грузозацепов.
Диаметр ведущей звездочки D3B (м) вязан с шагом цепи tЦ (м) и числом зубьев z соотношением:
![]() =
=  ,
,
где П = 3.14, откуда выразим z:
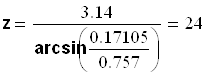
Округляя z принимаем числа зубьев равными 24, уточним размер звездочки:
Определим HГ min минимальную габаритную высоту гусениц, м:
HГ min = DЗВ + 2(hГЦ – h'ГЦ) = 0.749+2*(0.1405 – 0.059) = 0.91 м
Конструктивный диаметр звездочки D3B вычисляем с точностью до 10 -5 м, для использования, же этого результата в расчетах других параметров этот размер округляем с точностью вычисляемого параметра - до 0,01 м.
Верхняя ветвь гусеничной цепи проектируется несколько поднятой поддерживающими роликами. Тогда HГ > НГ min. Табличное значение НГ примем равным 0.91 м .
Определим габаритную длину LГ гусеницы, м:
LГ = lГ+HГ min = 3.83+0.91=4.74 м
Определим габаритную ширину ВХ гусеничного хода, м:
Bx= К+bГ = 2.5+0.8 м
Клиренс Кл под поворотной платформой, измеренный от уровня стоянки, определим по эмпирической зависимости, м:
Кл = (1.2...1.17) (НГ – 2h ГЗ) = 1.3(0.93 – 2 × 0.0253) = 1.14 м,
где значение коэффициента пропорциональности соответствуют массе экскаваторов тЭ = 24.2 т.
Остальные размеры базовой части гусеничных экскаваторов назначают, руководствуясь следующим.
Окончательно типоразмер опорно-поворотного круга определяют расчетом в зависимости от воспринимаемых им внешних нагрузок. На стадии предварительных расчетов диаметр ОПУ определяют по эмпирической зависимости:
![]()
Найденный размер округляют до ближайшего стандартного из ряда (Таблица 3):
Таблица 3.
![]()
Принимаем диаметр DОПУ = 1.25 м.
Ширину поворотной платформы ВПЛ гусеничных экскаваторов с минимальной опорной поверхностью гусениц назначают равной габаритной ширине гусеничного хода.
В продольном направлении размеры поворотной платформы определяются измеренными от оси ее вращения радиусами передней rП и хвостовой rХВ частей.
Первый назначают на 0,05...0,1 м больше половины диаметра ОПУ, а второй - по эмпирической зависимости:
![]()
![]()
Высоту балки поворотной платформы назначаем из пределов hm = 0,17…0,4 м, соответствующей указанной предельной массе экскаватора. Под кабиной этот размер уменьшим в два раза. Выбираем высоту балки поворотной платформы hm = 0,2 м.
Определим высоту НКП капота силовой установки, м:
![]()
На современных экскаваторах устанавливают унифицированную кабину с габаритными размерами: высотой 1.65 м, шириной 1 м и длиной 1.25 м. Ее размещают справа или, чаще, слева в передней части поворотной платформы с выдвижением вперед за переднюю балку последней на 0.2...0.3 м, В поперечном направлении кабину располагают у бокового края платформы. На экскаваторах малых моделей (до второй, иногда третьей размерных групп) из-за расположения в средней части платформы стоек-пилонов для крепления пяты стрелы кабину не удается вписать в габариты платформы. В этом случае ее несколько смещают в сторону.
Габаритная ширина ВЭ. ГАБ базовой части экскаватора определяется либо габаритной шириной гусеничного хода, либо, в случае смещения кабины за габарит поворотной платформы, размером от внешней боковой поверхности кабины до внешней плоскости противоположных гусеницы. Размер ВЭ. ГАБ следует сопоставить с габаритной шириной подвижного железнодорожного состава, равной 3,25 м, и принять решение о возможности перевозки экскаватора по железной дороге. Обычно малые модели экскаваторов, включая те, у которых кабина выходит за габариты поворотной платформы, вписываются в указанный выше железнодорожный габарит. Неудовлетворение этому требованию возможно лишь у машин больших размерных групп, для которых ВЭ. ГАБ = ВХ. Этот размер можно уменьшить за счет выбора минимального расчетного значения колеи К. При этом полученные ранее размеры ВХ и ВПЛ подлежат корректировке. Если ВХ больше ВПЛ (например, для экскаваторов с увеличенной опорной поверхностью гусениц), то иногда удается вписаться в железнодорожный габарит после снятия одной или двух гусеничных цепей при погрузке экскаватора на железнодорожную платформу. При этом с целью удовлетворения требованиям развески груза по ширине железнодорожной платформы предпочтительно снимать обе гусеничные цепи. При снятии одной гусеничной цепи погрузочная габаритная ширина гусеничной тележки уменьшится примерно на 0,4bГ по сравнению с габаритной шириной ВХ. В случае неудовлетворения описанных мер требованиям железнодорожного габарита для перевозки экскаватора по железной дороге требуется разработать специальные мероприятия, которые не входят в состав настоящего расчета.
Для достижения при заданных рабочих размерах рабочего оборудования наибольшей глубины и радиуса копания на уровне стоянки экскаватора или, при заданных рабочих размерах, минимальных линейных размеров рабочего оборудования, пяту стрелы желательно располагать на поворотной платформе возможно ниже и на максимально возможном вылете от оси вращения поворотной платформы. В то же время, ее координаты оказываются строго увязанными с длиной стрелового гидроцилиндра и координатами его пяты. Во избежание задевания гидроцилиндром, за раму ходовой тележки гусеницы у гусеничных экскаваторов при опущенной стреле пяту гидроцилиндра располагают не ниже середины балки поворотной платформы. Конструктивно эти координаты (высота h ПЦ и радиус r ПЦ) определим как:
![]()
![]()
Координаты пяты стрелы (высоту h ПС и радиус r ПС) определяют с учетом приведенных выше координат пяты стрелового гидроцилиндра и по условиям обеспечения подъема и опускания стрелы в соответствии с заданными технологическими размерами при указанных выше линейных размерах стрелового гидроцилиндра. Поскольку эти размеры на данной стадии расчетов еще не известны и могут быть определены при последующем расчете, в котором координаты пяты стрелы являются исходными, последними приходится задаться по формулам подобия:
![]()
![]()
и уточнить их после определения линейных размеров стрелового гидроцилиндра. По полученным размерам вычерчивают конструктивную схему базовой части экскаватора (рис.1).
2.2 Определение основных параметров ковша
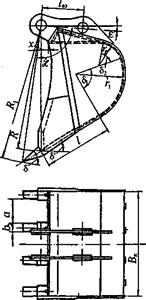
Рис. 3. Схема размеров основного ковша
Ориентировочно массу ковша тк (т) принимают пропорциональной его вместимости q (м3):
![]()
где ![]() - удельная масса
(приходящаяся на единицу вместимости), принимаемая равной 0,9 т/м3.
- удельная масса
(приходящаяся на единицу вместимости), принимаемая равной 0,9 т/м3.
![]()
Линейные размеры (м) основного ковша типа 02 (рис. 3) назначают в соответствии с действующим стандартом по формулам вида:
![]()
Значения коэффициентов пропорциональности k и свободных членов а приведены в табл. 2.
Таблица 2
| Определяемые размеры у (рис.2) | k | а, м |
|
Ширина
ковша по внутреннему обмеру, |
1,51 | -0,26 |
| Радиус, описываемый при повороте ковша кромкой передней стенки R | 1,1 | 0,26 |
|
То же
режущей кромкой зуба |
1,25 | 0,25 |
|
Длина
прямолинейной части передней стенки |
0,8 | 0 |
|
Радиусы
закруглений корпуса: |
0,45 | 0,08 |
|
|
0,22 | 0,08 |
Ширина ковша по внутреннему обмеру, ![]()
![]()
Радиус, описываемый при повороте ковша кромкой передней стенки, R
![]()
Радиус, описываемый при повороте
ковша кромкой зуба, ![]()
![]()
Длина прямолинейной части передней
стенки, ![]()
![]()
Радиусы закруглений корпуса, ![]() и
и ![]()
![]()
![]()
2.3 Определение основных параметров рабочего оборудования
Из всех основных видов сменного рабочего оборудования одноковшовых экскаваторов с гидравлическим приводом (обратной и прямой лопаты, грейфера, погрузочного ковша и т. д.) чаще всего применяют рабочее оборудование обратной лопаты. Этот вид рабочего оборудования характеризуется большим числом совмещаемых операций в цикле и более тяжелым нагруженном привода.
Для гидравлического экскаватора рабочее оборудование обратной лопаты следует считать расчетным видом оборудования, определяющим места крепления всех видов оборудования на поворотной платформе и мощность привода исполнительных механизмов.
Размеры элементов рабочего оборудования по длине должны соответствовать заданным предельным рабочим параметрам экскаватора - максимальной глубине копания НК и максимальной высоте выгрузки НВ при опущенной рукояти. Между НК и НВ существует зависимость:
![]()
где b = 0.85 м - ширина ковша, м;
kР = 1.26- коэффициент разрыхления грунта, задаётся в зависимости от категории грунта согласно таблицы. Hк =5.91 м, максимальная глубина копания, м. Определим длину стрелы lС, м:
где αС — угол поворота стрелы, αС = 94°.
Определим размер рукояти lР, м:
![]()
где Ki = 0.7645, коэффициент пропорциональности рукояти относительно массы экскаватора.
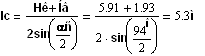
По найденным размерам ![]() и
и ![]() , троят осевой профиль
рабочей зоны
, троят осевой профиль
рабочей зоны
Рис. 4. Осевой профиль рабочей зоны
В процессе экскавации грунта надземная часть рабочей зоны может быть использована полностью, а подземная часть - только в пределах безопасной зоны, согласно СНиП ограниченной откосом безопасности не ближе 1 м (на уровне стоянки) от наиболее удаленной от оси вращения поворотной платформы точки опорного контура . Крутизна откоса безопасности зависит от вида разрабатываемого грунта и глубины копания. Абсциссу точки L - начала откоса безопасности на уровне стоянки экскаватора определим как
![]()
где а - расстояние от крайней точки опорного контура экскаватора до начала откоса, согласно СНиП принимаемое равным 1 м;
Bк=0.85 м – ширина ковша; lг – расчетная глубина копания
![]()
![]()
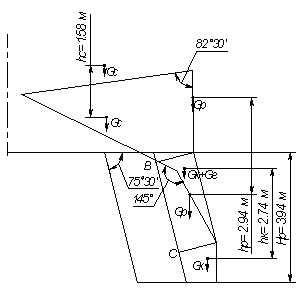
Рис. 5. Схема к определению параметров гидроцилиндра рукояти.
2.4 Выбор типоразмеров гидроцилиндров и их привязка
2.4.1 Выбор типоразмеров гидроцилиндра привода рукояти
Определим работу, затрачиваемую на преодоление сопротивлений грунта копанию рукоятью:

где К1 – удельное сопротивление грунта копанию, К1=220 кПа;
Кэ – коэффициент энергоемкости, Кэ=0.94;
q – вместимость ковша, q=0.4 м3;
lк=R1=1.2 м;
Hp=3.94 м – оптимальная глубина копания;
τ – угол наклона откоса безопасности к уровню стоянки экскаватора, τ=75˚30’

Для определения работы AG (кДж), затрачиваемой на преодоление сил тяжести рабочего оборудования и грунта в ковше, предварительно найдем силы тяжести ковша, рукояти с гидроцилиндром привода ковша, коромыслом и тягой, стрелы с гидроцилиндром привода рукояти и грунта в ковше.
Масса ковша mк (т) определена ранее, массы рукояти тр (т) и стрелы mс (т) определим приближенно по подобию с уже имеющимися экскаваторами как
![]()
![]()
где ![]() - масса 1 п. м.
металлоконструкции рукояти или стрелы, выбираемая из пределов
- масса 1 п. м.
металлоконструкции рукояти или стрелы, выбираемая из пределов ![]() = 0,08 ... 0,38 т/м при mэ= 6 ... 40. Принимаем
= 0,08 ... 0,38 т/м при mэ= 6 ... 40. Принимаем ![]() =
0,24 т/м.
=
0,24 т/м.
![]()
![]()
Массу грунта в ковше в начале (тгн, т) и в конце (mгв, т) прямолинейного участка ВС определим как:
![]()
![]()
где ![]() - плотность грунта,
- плотность грунта, ![]() =1.9 т/м3;
=1.9 т/м3;
V- объем грунта в ковше

Тогда
![]()
![]()
Определим силы тяжести рабочего оборудования.
Сила тяжести рукояти:
![]()
Сила тяжести стрелы:
![]()
Сила тяжести ковша:
![]()
Сила тяжести грунта в ковше в начале и в конце участка ВС:
![]()
![]()
С использованием полученных данных вычислим работу, затрачиваемую на преодоление сопротивления сил тяжести элементов рабочего оборудования и грунта в ковше на указанных перемещениях:


Полная работа, затрачиваемая на преодоление сопротивлений грунта копанию и подъему рабочего оборудования с грунтом, определится суммой:
![]()
Такую же работу, с учетом потерь на трение в кинематических парах, учитываемых коэффициентом полезного действия (КПД) механизма поворота рукояти, выполнит гидроцилиндр ее привода:
![]() ,
,
Приближенно указанный КПД можно определить как:
![]()
где ![]() - КПД одного шарнира (для
смазанных шарниров
- КПД одного шарнира (для
смазанных шарниров ![]() );
);
n - число шарниров (п = 3); ![]() - механический КПД
гидроцилиндра, учитывающий потери на трение в парах поршень - зеркало цилиндра
и шток - накидная гайка (
- механический КПД
гидроцилиндра, учитывающий потери на трение в парах поршень - зеркало цилиндра
и шток - накидная гайка (![]() ).
).
![]()
Тогда работа гидроцилиндра механизма поворота рукояти будет равна:
Представим работу ![]() через параметры гидроцилиндра:
перепад давлений рабочей жидкости в его полостях, принимаемый как среднее
рабочее давление
через параметры гидроцилиндра:
перепад давлений рабочей жидкости в его полостях, принимаемый как среднее
рабочее давление ![]() (кПа); площадь F (м2) и ход поршня
(кПа); площадь F (м2) и ход поршня ![]() (м).
С учетом примерно 10% потерь при перемещении жидкости от насоса к гидроцилиндру
среднее рабочее давление определится как:
(м).
С учетом примерно 10% потерь при перемещении жидкости от насоса к гидроцилиндру
среднее рабочее давление определится как:
![]() , МПа
, МПа
где ![]() - среднее рабочее
давление, развиваемое насосом, МПа. Для аксиально-поршневых насосов серии 223
- среднее рабочее
давление, развиваемое насосом, МПа. Для аксиально-поршневых насосов серии 223 ![]() = 32 МПа.
= 32 МПа.
![]()
В пределах рассматриваемого перемещения рабочего оборудования ход поршня Ln используется лишь частично - Ln'. Предполагая перемещение поршня примерно пропорциональным синусу половины углового перемещения рукояти относительно стрелы, найдем:
![]() , м
, м
где ради сокращения записи в дальнейших расчетах обозначено:
где ![]() и
и ![]() - углы между
кинематическими звеньями
- углы между
кинематическими звеньями ![]() и
и ![]() соответственно в их нижнем
и верхнем положениях (определяются непосредственным измерением по схеме рис. 5),
соответственно в их нижнем
и верхнем положениях (определяются непосредственным измерением по схеме рис. 5),
![]() =145˚ и
=145˚ и ![]() =82.5˚
=82.5˚
![]() - полное угловое перемещение
рукояти,
- полное угловое перемещение
рукояти, ![]() =105˚
=105˚
Представим работу гидроцилиндра в виде:
![]() , кДж
, кДж
Произведение ![]() есть рабочий объем
гидроцилиндра
есть рабочий объем
гидроцилиндра ![]() (м3)
- его обобщенная характеристика. Тогда рабочий объем гидроцилиндра будет равен
(м3)
- его обобщенная характеристика. Тогда рабочий объем гидроцилиндра будет равен
 , л
, л
![]()
По этому параметру (отклонение в меньшую сторону не более 10%) предварительно выберем типоразмер гидроцилиндра (таб. 3).
Таблица 3
| Диаметр поршня D, мм | 140 |
| Диаметр штока d, мм | 90 |
| Наружный диаметр гильзы D1, мм | 168 |
| Наружный радиус концевой проушины r, мм | 100 |
| Размер A=L0-Lш, мм | 580 |
| Площадь поршня F, см2 | 153.9 |
| Рабочий объем W, л | 13.85 |
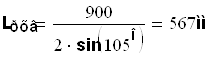
| Ход поршня L, мм | 900 |
2.4.2 Выбор типоразмеров гидроцилиндра механизма поворота ковша
Механизм поворота ковша состоит из стойки (рукояти) 1 (рис. 6), ползунковой пары гильза гидроцилиндра - поршень со штоком 2, коромысла 3, тяги 4 и ведомого звена (ковша) 5.
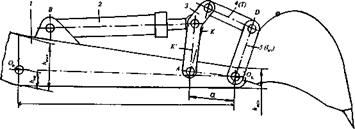
Рис. 6. Конструктивная схема механизма поворота ковша
Не располагая
исчерпывающими результатами исследований оптимальных отношений кинематических
звеньев механизма, для расчета назначим их по подобию с существующими экскаваторными
механизмами (в долях от длины ведомого звена ![]() -
расстояния между проушинами ковша,
-
расстояния между проушинами ковша, ![]() =0.35
м):
=0.35
м):
Длина стойки
![]()
Длина большего плеча коромысла
![]()
Длина тяги
![]()
Вычислим работу сил сопротивления грунта копанию без учета влияния изменчивости толщины грунтовой стружки:
![]()
Работа, затрачиваемая на преодоление сопротивлений грунта копанию поворотом ковша, равна:
![]()
где ξ – поправочный коэффициент, учитывающий изменчивость толщины стружки, ξ=1.25 для глин и суглинков.
![]()
Работа, затрачиваемая на
преодоление сопротивлений сил тяжести ковша и грунта в нем, не превышают 2,5.
..3,5% от вычисленной выше работы ![]() , в
связи с чем учтем ее поправочным коэффициентом в полной работе сил
сопротивления копанию грунта поворотом ковша:
, в
связи с чем учтем ее поправочным коэффициентом в полной работе сил
сопротивления копанию грунта поворотом ковша:
![]()
Вычислим рабочий объем гидроцилиндра
где ![]() - механический КПД
гидроцилиндра, учитывающий потери на трение в парах поршень - зеркало цилиндра
и шток - накидная гайка (
- механический КПД
гидроцилиндра, учитывающий потери на трение в парах поршень - зеркало цилиндра
и шток - накидная гайка (![]() ).
).
![]()
![]() - коэффициент, определяется как
- коэффициент, определяется как
Тогда рабочий объем гидроцилиндра равен
![]()
Выбираем гидроцилиндр с рабочим объемом Wгц=9.7 л, ходом поршня L=630 мм. Остальные параметры гидроцилиндра приведены в таб.3.
По полученным значениям стойки, коромысла, тяги и гидроцилиндра строим схему привязки гидроцилиндра и находим точку его крепления (рис. 7).
Сориентируем теперь гидроцилиндр по отношению к коромыслу, для чего определим места расположения концевых шарниров гидроцилиндра на рукояти (шарнир D, см. рис. 7) и на коромысле (шарнир Е). Эту операцию будем называть в дальнейшем привязкой гидроцилиндра.
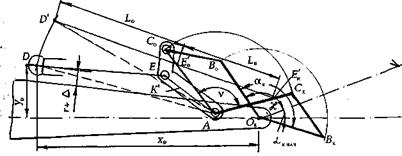
Рис. 7 Привязка гидроцилиндра привода ковша.
Потребуем, чтобы в
крайних положениях ковша сопротивления грунта копанию преодолевались равными
усилиями на штоке гидроцилиндра. Неудовлетворение этому требованию приводит к
перегрузке гидроцилиндра в одном положении и недоиспользованию его силового
потенциала в другом положении. Согласно этому требованию гидроцилиндр можно
было бы привязать к коромыслу в точке Е'0 так, чтобы длина отрезка Е'0Е'К,
параллельного отрезку С0СК, была в точности равна ходу
поршня ![]() =630мм, а шарнир привязки
гильзы к рукояти (точка D')
находился бы на расстоянии L0
(длина
гидроцилиндра по концевым шарнирам при полностью втянутом штоке) на одной
прямой с отрезком Е'0Е'К. На завершающем этапе следует,
не изменяя угла AE'0D', повернуть ломаную AE'0D' относительно шарнира А в положение,
при котором, во избежание задевания проушины гильзы за рукоять, центр шарнира D находился бы на удалении
=630мм, а шарнир привязки
гильзы к рукояти (точка D')
находился бы на расстоянии L0
(длина
гидроцилиндра по концевым шарнирам при полностью втянутом штоке) на одной
прямой с отрезком Е'0Е'К. На завершающем этапе следует,
не изменяя угла AE'0D', повернуть ломаную AE'0D' относительно шарнира А в положение,
при котором, во избежание задевания проушины гильзы за рукоять, центр шарнира D находился бы на удалении ![]() (
(![]() - наружный радиус
проушины;
- наружный радиус
проушины; ![]() = 100...150 мм - зазор) от
верхнего обреза рукояти. Положения шарниров D и Е определят ориентацию гидроцилиндра по отношению к
коромыслу, а взаимное расположение шарниров А, Е и С0, кроме того,
определит конфигурацию коромысла.
= 100...150 мм - зазор) от
верхнего обреза рукояти. Положения шарниров D и Е определят ориентацию гидроцилиндра по отношению к
коромыслу, а взаимное расположение шарниров А, Е и С0, кроме того,
определит конфигурацию коромысла.
Рис. 8. Привязка гидроцилиндра привода ковша.
2.4.3 Выбор типоразмеров гидроцилиндра привода стрелы
В приводе стрелы устанавливают либо один, либо два гидроцилиндра.
При подъеме рабочего оборудования стреловыми гидроцилиндрами одолеваются силы тяжести стрелы, рукояти, ковша, грунта в нем, гидроцилиндров привода рукояти и ковша, коромысла и тяги, а также собственных поршней со штоками.
Найдем суммарный рабочий объем гидроцилиндров привода стрелы:
где ![]() (кН), и
(кН), и ![]() (м) - сила тяжести и
вертикальное перемещение центра масс i – го элемента рабочего оборудования или грунта.
(м) - сила тяжести и
вертикальное перемещение центра масс i – го элемента рабочего оборудования или грунта. ![]() - определяется по схеме
высотных перемещений центров масс элементов рабочего оборудования (рис. 9).
- определяется по схеме
высотных перемещений центров масс элементов рабочего оборудования (рис. 9).
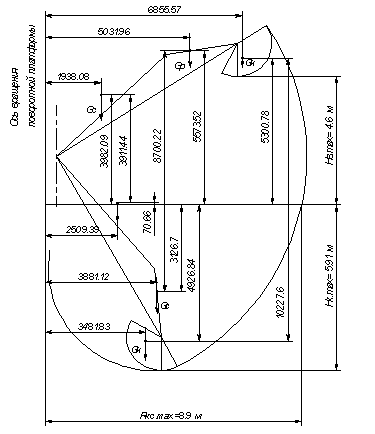
Рис. 9. Схема высотных перемещений центров масс элементов рабочего оборудования.
![]()
Рабочий объем одного гидроцилиндра равен:
По полученному рабочему объему выбираем гидроцилиндр (таб.4)
Таблица 4
| Диаметр поршня D, мм | 140 |
| Диаметр штока d, мм | 90 |
| Наружный диаметр гильзы D1, мм | 168 |
| Размер А, мм | 580 |
| Площадь поршня F, см2 | 153,9 |
| Рабочий объем W, л | 17.24 |
| Ход поршня L, мм | 1120 |
| Наружный радиус концевой проушины r, мм | 100 |
Предварительно
гидроцилиндр привязывают к стреле. В качестве исходных данных используют полный
угол поворота стрелы ![]() , длины L0 и L0 + Lп гидроцилиндра по концевым шарнирам соответственно с полностью
втянутым и выдвинутым штоком, а также вероятное отношение моментов внешних сил
относительно оси пяты стрелы
, длины L0 и L0 + Lп гидроцилиндра по концевым шарнирам соответственно с полностью
втянутым и выдвинутым штоком, а также вероятное отношение моментов внешних сил
относительно оси пяты стрелы ![]() в
начале подъема рабочего оборудования из предельного нижнего положения (Мсн)
и в конце подъема на максимальную высоту (Мсв). Используется нижняя
часть схемы, представленной на рис.9. Суммарный момент сил тяжести относительно
оси пяты стрелы определится как
в
начале подъема рабочего оборудования из предельного нижнего положения (Мсн)
и в конце подъема на максимальную высоту (Мсв). Используется нижняя
часть схемы, представленной на рис.9. Суммарный момент сил тяжести относительно
оси пяты стрелы определится как
![]() , кНм
, кНм
где ![]() и
и ![]() (м) - абсцисса и ордината
центра масс i - го элемента рабочего оборудования
или грунта, отсчитываемые соответственно от оси вращения поворотной платформы и
от уровня стоянки экскаватора рис.9.
(м) - абсцисса и ордината
центра масс i - го элемента рабочего оборудования
или грунта, отсчитываемые соответственно от оси вращения поворотной платформы и
от уровня стоянки экскаватора рис.9.
![]()
![]()
![]()
Момент сил тяжести и центробежных сил относительно оси пяты в верхнем положении рабочего оборудования (рис.8 верхнее положение) определится как
![]() , кНм
, кНм
где ![]() кН – центробежные силы,
кН – центробежные силы,
где ![]() - масса i -го элемента, т;
- масса i -го элемента, т; ![]() -
угловая скорость поворотной платформы в конце разгона, ориентировочно принимаем
-
угловая скорость поворотной платформы в конце разгона, ориентировочно принимаем
Тогда
![]()
![]()
![]()
Этот момент не должен
превышать допустимого момента [М] по условиям устойчивости экскаватора, для
гусеничных экскаваторов - ![]() .
.

Условие Мсв ≤ [М] выполняется.
Схема привязки стрелового
гидроцилиндра представлена на рис.10, где через а = ОсА обозначено
расстояние от оси пяты стрелы до оси шарнира, соединяющего гидроцилиндр со
стрелой, а через b = ОсОпц - расстояние между осями пят стрелы и
гидроцилиндра. Найдем сначала показанные на рис. 10 углы ![]() и
и ![]() . Потребуем, чтобы
сопротивления подъему рабочего оборудования в его крайних положениях
преодолевались равными усилиями на штоке гидроцилиндра, для чего необходимо,
чтобы было выполнено условие:
. Потребуем, чтобы
сопротивления подъему рабочего оборудования в его крайних положениях
преодолевались равными усилиями на штоке гидроцилиндра, для чего необходимо,
чтобы было выполнено условие:
![]()
Приближенно, учитывая
малость углов ![]() и
и ![]() , можно принять
, можно принять ![]() ;
; ![]() ;
; ![]() , после чего:
, после чего:
![]() ;
; ![]() .
.
где
Тогда

![]()
После отыскания углов ![]() и
и ![]() расстояния а и b определятся как
расстояния а и b определятся как
![]() , м;
, м;
![]() , м
, м
![]()
![]()
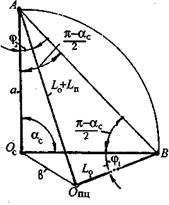
Рис. 10. Привязка стрелоподъемного гидроцилиндра.
2.4.4 Привязка гидроцилиндра привода рукояти
В качестве исходных данных для привязки гидроцилиндра привода рукояти используют размеры очертания удлиняющей части стрелы вместе с кинематической осью последней (по результатам построения конфигурации стрелы), положения кинематической оси рукояти, предельно отвернутой от стрелы 1 (рис. 11) и предельно подвернутой к ней 2 (из построений осевого профиля), размеры окончательно выбранного гидроцилиндра -ход поршня Lп и длина по концевым шарнирам с полностью втянутым штоком L0.
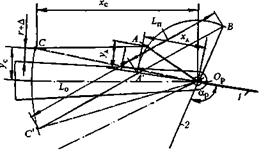
Рис. 11. Привязка гидроцилиндра привода рукояти.
Первоначально хвостовую
часть рукояти (кривошип) можно ориентировать произвольно относительно ее
кинематической оси, например, на продолжении последней: ОрА' при отвернутой от
стрелы рукояти, ОрВ при подвернутой рукояти. Длину кривошипа ![]() назначают из условия,
чтобы основание А'В треугольника А'ВОр в точности было равно размеру Lп, так что
назначают из условия,
чтобы основание А'В треугольника А'ВОр в точности было равно размеру Lп, так что
![]() , м
, м
Все последующие действия
аналогичны таковым для привязки ковшового гидроцилиндра: А'С' = L0 на продолжении отрезка А'В, поворот ной ОрА'С' в положение ОрАС (точка С на
расстоянии ![]() от верхнего обреза балки
стрелы). В результате привязки гидроцилиндра получено положение шарнира С относительно
удлиняющей части стрелы и ориентация кривошипа ОрА относительно кинематической
оси рукояти 1.
от верхнего обреза балки
стрелы). В результате привязки гидроцилиндра получено положение шарнира С относительно
удлиняющей части стрелы и ориентация кривошипа ОрА относительно кинематической
оси рукояти 1.
2.5 Расчет рабочего оборудования
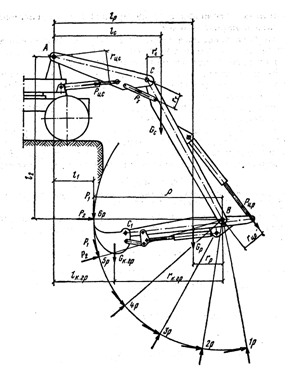
Рис. 12. Схема к определению усилий, действующих на рабочее оборудование одноковшового экскаватора.
Копание поворотом ковша. На рабочее оборудование действуют наибольшие нагрузки в период копания гидроцилиндром ковша на максимальной глубине. Если наибольшее усилие на режущей кромке ковша не может быть достигнуто из-за ограниченной устойчивости экскаватора или ограничения реактивного усилия в гидроцилиндре рукояти, то за расчетное принимают положение, при котором рукоять повернута на угол, допускающий развитие максимального усилия на режущей кромке ковша, что соответствует расчетному положению рукояти 3р (рис.12) и ковша Зк (рис.13).
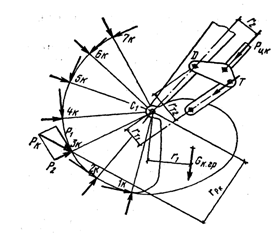
Рис. 13. Схема к определению усилий в тяге ковша.
Определим наибольшее реактивное усилие, которое возникает в цилиндре рукояти РЦР, кН:
Определим реактивное усилие, которое возникает в цилиндре рукояти в положении 6р:
ΣМВ = 0
- РЦР6 · (rЦР6) + GК.ГР · (rК.ГР6) + GР · (rР6) + РСР · (ρ) = 0
РЦР6 = 1 / rЦР6 · (GК.ГР · (rК.ГР6) + GР · (rР6) + РСР · (ρ)) =
= 1/0.39 · (11 · 2.97 + 7.65 · 0.83 + 39.5 · 3.7) = 473.8 кН
Определим реактивное усилие, которое возникает в цилиндре рукояти в положении 5р:
ΣМВ = 0
- РЦР5 · (rЦР5) + GК.ГР · (rК.ГР5) + GР · (rР5) + РСР · (ρ) = 0
РЦР5 = 1 / rЦР5 · (GК.ГР · (rК.ГР5) + GР · (rР5) + РСР · (ρ)) =
= 1/0.502 · (11 · 2.81 + 7.65 · 0.78 + 39.5 · 3.7) =364.6 кН
Определим реактивное усилие, которое возникает в цилиндре рукояти в положении 4р:
ΣМВ = 0
- РЦР4 · (rЦР4) + GК.ГР · (rК.ГР4) + GР · (rР4) + РСР · (ρ) = 0
РЦР4 = 1 / rЦР4 · (GК.ГР · (rК.ГР4) + GР · (rР4) + РСР · (ρ)) =
= 1/0.55 · (11 · 2.3 + 7.65 · 0.65 + 39.5 · 3.7) =320 кН
Определим реактивное усилие, которое возникает в цилиндре рукояти в положении 3р:
ΣМВ = 0
- РЦР3 · (rЦР3) + GК.ГР · (rК.ГР3) + GР · (rР3) + РСР · (ρ) = 0
РЦР3 = 1 / rЦР3 · (GК.ГР · (rК.ГР3) + GР · (rР3) + РСР · (ρ)) =
= 1/0.54 · (11 · 1.62 + 7.65 · 0.45 + 39.5 · 3.7) =310 кН
Определим реактивное усилие, которое возникает в цилиндре рукояти в положении 2р:
ΣМВ = 0
- РЦР2 · (rЦР2) + GК.ГР · (rК.ГР2) + GР · (rР2) + РСР · (ρ) = 0
РЦР2 = 1 / rЦР2 · (GК.ГР · (rК.ГР2) + GР · (rР2) + РСР · (ρ)) =
= 1/0.54 · (11 · 0.72 + 7.65 · 0.2 + 39.5 · 3.7) =324 кН
Определим реактивное усилие, которое возникает в цилиндре рукояти в положении 1р:
ΣМВ = 0
- РЦР1 · (rЦР1) - GК.ГР · (rК.ГР1) - GР · (rР1) + РСР · (ρ) = 0
РЦР1 = 1/ rЦР1 · (- GК.ГР · (rК.ГР1) - GР · (rР1) + РСР · (ρ)) =
= 1/0.36 · (-11 · 0.26 - 7.65 · 0.07 + 39.5 · 3.7) =396.5 кН
Мы определили, что наибольшее реактивное усилие в цилиндре рукояти будет возникать в положении 6р. Далее мы выбираем по стандартизированному ряду гидроцилиндр, определяя его диаметр и площадь поршневой полости. Из полученных расчетов выбираем гидроцилиндр с диаметром поршня d = 0.125 м. Максимальное давление в гидроцилиндре принимаем равным 32 МПа. Подробный расчет гидроцилиндра будет рассмотрен нами далее.
Определим максимальное реактивное усилие в цилиндре рукояти РЦР, кН:
РЦРмакс = pМАКС · FЦР = 320 · 153.9 =492.5 кН,
где рМАКС - максимальное давление в цилиндре рукояти, кН;
В этом случае при копании поворотом ковша на его режущей кромке развивается усилие (рис. 12, 13) в положении 6Р:
ΣМВ = 0
Р1-6 · (ρ) – РЦР · (rЦР6) + GК.ГР · (r К.ГР) + GР · (r Р6) = 0
Р1-6 = 1 / ρ · (РЦР · (rЦР6) - GК.ГР · (r К.ГР) - GР · (r Р6)) =
= 1/3.7 · (-11 ·2.97 - 7.65 · 0.83 + 492.5 · 0.39) =41.4 кН,
в положении 3Р:
ΣМВ = 0
Р1-3 · (ρ) - РЦР · (rЦР1) - GК.ГР · (r К.ГР) - GР · (r Р1) = 0
Р1-3 = ![]() =
=
= 1/3.7 · (-11 ·1.62 - 7.65 · 0.45 + 492.5 · 0.54) =66.1 кН,
в положении 1Р:
ΣМВ = 0
Р1-1 · (ρ) - РЦР · (rЦР1) - GК.ГР · (r К.ГР) - GР · (r Р1) = 0
Р1-1 = ![]() =
=
= 1/3.7 · (11 ·0.26 + 7.65 · 0.45 + 492.5 · 0.36) =48.8 кН,
где ρ - плечо силы Р1 действующей относительно точки В, м.
Определим нормальную составляющую для положений 6Р, 3Р и 1Р:
P2-6 ≈ 0,2P 1-6 = 0.2 · 41.4 = 8.28 кН
P2-3 ≈ 0,2P 1-3 = 0.2 · 66.1 = 13.22 кН
P2-1 ≈ 0,2P 1-1 = 0.2 · 48.8 = 9.76 кН
Усилие на режущей кромке ковша для положений 6Р, 3Р и 1Р:
РК6мах = ![]() = 42.22 кН
= 42.22 кН
РК3мах = ![]() = 67.41 кН
= 67.41 кН
РК1мах = ![]() = 49.76 кН
= 49.76 кН
Из расчетов мы видим, что усилие на режущей кромке ковша для положения 3Р, равно РК1мах = 67.41 кН, это усилие на режущей кромке ковша будет являться максимальным, так как в этом положении будет максимальное плечо гидроцилиндра рукояти относительно шарнира В.
При копании без поворота ковша. Стрела максимально опущена вниз, копают без поворота ковша при движении рукояти снизу вверх, участок 1Р на траектории является наиболее нагруженным для гидроцилиндра стрелы, так как в этом положении плечо гидроцилиндра стрелы будем минимальным. Расчетные положения рабочего оборудования для этого случая показаны на рис. 13.
Из суммы моментов, действующих относительно точки В (шарнира рукоять—стрела), и по усилию в гидроцилиндре рукояти находят усилия на режущей кромке ковша. При этом считаем, что максимальный отпор грунта будет равен:
Р1-1 · (ρ) - РЦР · (rЦР1)+ GК.ГР · (r К.ГР) + GР · (r Р1) = 0
Р1-1 = 1/(3.7) · (492.5 · (0.36) - 11 · (0.26) - 7.65 · (0.07)) = 47 кН,
где P1-1 - касательное усилие, действующее на кромке ковша при копании рукоятью; р - радиус приложения усилия на кромке ковша при копании рукоятью, м; РЦР=492.5 кН - усилие, действующее в гидроцилиндре рукояти; rЦР- плечо приложения усилия в гидроцилиндре рукояти, м; GР и GК.ГР - вес рукояти с гидроцилиндром ковша и ковша с грунтом; rР и rК.ГР - плечи сил тяжести рукояти и ковша с грунтом, м.
По найденному усилию P1-1, действующему на зубья ковша (режущую кромку ковша), и сумме моментов относительно точки А (пяты стрелы) определяют реактивное усилие в гидроцилиндрах стрелы по формуле:
РЦС = ![]()
Реактивное усилие в цилиндрах стрелы PЦС для положений 1Р определим по формуле:
PЦС1= (1 / 0.54) · (47 · 8.04 + 14.35 · ∙2.1 + 7.65 · 3.48 + 11 · 3.66 – -9.76· 3.03) = 824.6 кН,
По результатам расчета активных и реактивных усилий для рассматриваемых положений находим наиболее неблагоприятное расчетное положение. Этому положению соответствует крайнее нижнее положение стрелы 1Р. При копании поворотом ковша. Определим усилие для положений 6Р, 3Р и 1Р, действующее в тяге ковша (относительно шарнира крепления ковша и рукояти) Т, кН:
Т6 = ![]() = (1 / 0.234) · (49.76 · 1.2 + 11 · 0.049) =257.5 кН,
= (1 / 0.234) · (49.76 · 1.2 + 11 · 0.049) =257.5 кН,
где r1 = 0.049 м - плечо силы тяжести ковша с грунтом относительно точки C1; rРк = 1.2 м – плечо силы РК.
Т3= ![]() = (1 / 0.34) · (49.76 · 1.2 - 11 · 0.565) =157.3 кН,
= (1 / 0.34) · (49.76 · 1.2 - 11 · 0.565) =157.3 кН,
где r1 = 0.565 м - плечо силы тяжести ковша с грунтом относительно точки C1;
Т1 = ![]() = (1 / 0.268) · (49.76 · 1.2 - 11 · 0.24) =212.9 кН,
= (1 / 0.268) · (49.76 · 1.2 - 11 · 0.24) =212.9 кН,
где r1 = 0.24 м - плечо силы тяжести ковша с грунтом относительно точки C1;
Определим усилие в цилиндре ковша для положений 6Р, 3Р и 1Р:
PЦК6 = TrТ2/r2 = 257.5 · 0.435 / 0.24 = 466.7 кН,
где r2 = 0.24 м - плечо силы РЦК относительно точки D; rТ2 = 0.435 м - плечо усилия в тяге Т относительно точки D.
PЦК3 = TrТ2/r2 = 157.3 · 0.43 / 0.38 = 177.9 кН,
где r2 = 0.38 м - плечо силы РЦК относительно точки D; rТ2 = 0.43 м - плечо усилия в тяге Т относительно точки D.
PЦК1 = TrТ2/r2 = 212.9 · 0.3 / 0.22 = 290.3 кН,
где r2 = 0.22 м - плечо силы РЦК относительно точки D; rТ2 = 0.3 м - плечо усилия в тяге Т относительно точки D.
2.6 Расчет на прочность гидроцилиндров
Расчет гильзы выполняется на три вида напряжений, возникающих от давления жидкости.
Определим касательное напряжение, действующее в окружном направлении, мПа:
Для гидроцилиндра стрелы:
σt = 1,1[p](D+δ)/2δ = 1.1 · 32 · (0.14 + 0.021) / 2· 0.021 = 134.93 мПа,
где 1,1[p] – наибольшее (пиковое) давление; [p] = 32 мПа - давление настройки предохранительного клапана; D = 0.14 м – диаметр гидроцилиндра стрелы; δ = 0.015 м - толщина стенки, определяется по таб.5 .
Для гидроцилиндра рукояти:
σt = 1,1[p](D+δ)/2δ = 1.1 · 32 · (0.14 + 0.021) / 2· 0.021 = 134.93 мПа,
где 1,1[p] – наибольшее (пиковое) давление; [p] = 32 мПа - давление настройки предохранительного клапана; D = 0.14 м – диаметр гидроцилиндра рукояти;
δ = 0.021 м – толщина стенки, определяется по таб.5 .
σt = 1,1[p](D+δ)/2δ = 1.1 · 32 · (0.14 + 0.021) / 2· 0.021 = 134.93 мПа,
где 1,1[p] – наибольшее (пиковое) давление; [p] = 32 мПа - давление настройки предохранительного клапана; D = 0.14 м – диаметр гидроцилиндра рукояти;
δ = 0.021 м – толщина стенки, определяется по таб.5 .
Таблица 5.
Определим напряжение в осевом направлении, мПа:
Для гидроцилиндра стрелы:
σ0= 1,1[p]D2 / 4(D+δ)δ = 1.1 · 32 · 0.142 / 4 · (0.14 + 0.021) · 0.021 =51МПа
Для гидроцилиндра рукояти:
σ0= 1,1[p]D2 / 4(D+δ)δ = 1.1 · 32 · 0.142 / 4 · (0.14 + 0.021) · 0.021 =51МПа
Для гидроцилиндра ковша:
σ0= 1,1[p]D2 / 4(D+δ)δ = 1.1 · 32 · 0.142 / 4 · (0.14 + 0.021) · 0.021 =51МПа
Радиальными напряжениями ввиду их незначительности можно пренебречь.
Определим эквивалентные напряжения, МПа:
σэкв = (σt2 + σo2 - σtσo)1/2 ≤ [σ] = σT / n
σэкв = (σt2 + σo2 - σtσo)1/2 = (134.92 + 512 - 134.9 · 51)1/2 = 118 МПа 3.93
118 ≤ [σ]= 250 / 1.8 = 138.8 МПа
Расчет штока выполняется для худшего случая работы штока – сжатие при полном его выдвижении.
В этом случае напряжения сжатия равны, МПа:
Для штока стрелы:
σсж= РЦ / Sшφ ≤ [σсж] = РЦ / Sшφ = 0.412 / 0.0063 · 0.95 = 68.8 ≤ [σсж] =300 / 1.8 = 166.7 МПа
Для штока рукояти:
σсж= РЦ / Sшφ ≤ [σсж] = РЦ / Sшφ = 0.473 / 0.0063 · 0.89 = 84.3 ≤ [σсж] = 300 / 1.8 = 166.7 МПа
Для штока ковша:
σсж= РЦ / Sшφ ≤ [σсж] = РЦ / Sшφ = 0.466 / 0.0063 · 0.89 = 90.2 ≤ [σсж] = 300 / 1.8 = 166.7 МПа
где РЦ – усилие на штоке, Н; SШ – площадь штока, м2; φ – коэффициент, зависящий от гибкости штока λ и его свободной длины lш
Определим длину штока, м:
lш=L+(A-D),
Для штока стрелы:
lш=L+(A-D) = 1.12 + (0.58 – 0.14) = 1.56 м
Для штока рукояти:
lш=L+(A-D) = 0.9 + (0.58 – 0.14) = 1.34 м
Для штока ковша:
lш=L+(A-D) = 0.63 + (0.58 – 0.14) = 1.07 м
где L – ход штока, м;
А – конструктивный параметр гидроцилиндра, м;
D – диаметр цилиндра, м.
2.7 Параметры насосно–силовой установки. Выбор типоразмеров насосов и первичного двигателя
Определим типоразмер насосов по наиболее энергоемкой операции копания, продолжительность которой определим приближенно, в соответствий с рекомендациями, по эмпирической зависимости:
![]()
где q = 0.4 м3, вместимость основного ковша.
Приведенная к насосу регуляторная мощность определится как:

где АΣ = 146 кДж, kИ = 0.85 – коэффициент использования мощности насосной установки; ηΣ = 0.54 … 0.66.
Определим номинальную подачу, при РН ном = 20 МПа:

По этой подаче выберем насос серии 223.5 (двухпоточный аксиально– поршневой насос).
Определим требуемую частоту вращения вала, об / мин:
η НОМ = η НОМ ТАБЛ · Q НОМ / Q НОМ табл = 1400 ·198 / 290.6 =
=953 об / мин
Типоразмер выполнен правильно, так как η НОМ < η НОМ , где η МАХ = 2700 об / мин
Определим требуемую мощность двигателя внутреннего сгорания:
NE = NРЕГ · kСН / η РЕД · kВЫХ = 66 ·1.1 / (0.97·0.9) =83 кВт,
где kСН = 1.1 …1.15 - коэффициент учитывающий потребление мощности на собственные нужды (обогрев кабины, кондиционирование воздуха, электроосвещение); η РЕД = 0.97 – КПД редуктора; k ВЫХ = 0.9 – коэффициент снижения выходной мощности двигателя вследствие колебания нагрузки.
По мощности определим тип двигателя внутреннего сгорания серии СМД - 14
Определим передаточное число редуктора:
U = nДВ / n Н = 1400 / 953= 1.9
2.8 Расчет металлоконструкции рукояти
Определим наиболее нагруженное положение рукояти.
В положении 3Р будет максимальное плечо гидроцилиндра рукояти относительно шарнира В (стрела и рукоять). Из этого следует, что в этом положении будет развиваться наибольшее усилие копания, а со стороны ковша на рукоять будут действовать максимальные силы на шарниры рукояти.
Определим усилие для положений 3Р, действующее в тяге ковша (относительно шарнира крепления ковша и рукояти) Т, кН:
Т3= ![]() = (1 / 0.34) · (67.4 · 1.2 + 11 · 0.56) = 219.7 кН
= (1 / 0.34) · (67.4 · 1.2 + 11 · 0.56) = 219.7 кН
Определим усилие в цилиндре ковша для положений 3Р:
PЦК3 = TrТ2/r2 = 219.7· 0.43 / 0.38 = 248.6 кН
Зная значения максимального усилия копания ковша, усилия в тяге ковша, усилия гидроцилиндра ковша, методом плана сил определим силы, которые действуют в шарнирах рукояти. Все построения для определения сил, выполним в масштабе. Чтобы определить силы возникающие в шарнирах рукояти, рассмотрим каждое звено (ковш, тягу, коромысло, рукоять) в отдельности.
Рассмотрим звено ковша.
Зная направление и значение силы действующей на ковш от тяги, а так же направление и силу действующее на ковш при копании, методом плана сил определим значение и направление силы, которая возникает в шарнире ковша РКОВ:
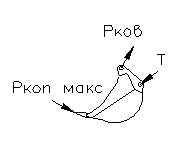
Рис. 14. Схема распределений усилий в ковше.
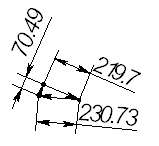
Рис. 15. План сил возникающих в ковше.
Воспользовавшись методом плана сил, мы определили значение и направление силы РКОВ = 230.73 кН. Рассмотрим звено коромысла. Зная направление и значение силы действующей в тяги, а так же направление и силу действующее на коромысло от гидроцилиндра ковша, методом плана сил определим значение и направление силы, которая возникает в шарнире коромысла РКОР:
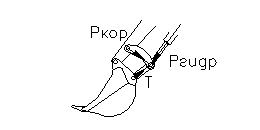
Рис. 16. Схема распределений усилий в коромысле.
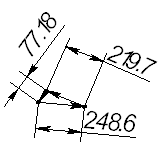
Рис. 17. План сил возникающих в коромысле.
Воспользовавшись методом плана сил, мы определили значение и направление силы РКОР = 77.18 кН. Рассмотрим звено рукояти. Зная направление и значение сил действующих в ковше, коромысле, гидроцилиндров рукояти и ковша, методом плана сил определим значение и направление силы, которая возникает в шарнире рукояти РСТЕЛЫ = 555.1 кН
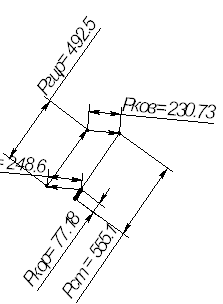
Рис. 18. План сил определения усилия возникающего в шарнире рукояти и стрелы.
Выполним проверку:
ΣFx = 0;
ΣFy = 0;
ΣFx = 0
РГЦР = 492.5 · cos 54º = 325.7 кН
РКОРОМ = 77.48 · cos 54º = 51.3 кН
РСТРЕЛЫ = 555.1 · cos 55º = -360.4 кН
РКОВША = 230.73 · cos 5º = 230.4 кН
РГЦК = 248.6 · cos 5.5º = -247 кН
325.7 + 51.3 – 360.4 – 247 + 230.4 = 0
ΣFy = 0
РГЦР = 492.5 · cos 36º = 414 кН
Р КОРОМ = 77.48 · cos 36º = 64 кН
РСТРЕЛЫ = 555.1 · cos 35º = -474.3 кН
РКОВША = 230.73 · cos 85º = -54 кН
РГЦК = 248.6 · cos 84.5º = 58 кН
Gр = -7.7 кН
414 + 64 - 474.3 - 54 + 58 - 7.7 = 0
Исходные данные для расчета рукояти:
РО = 230.73 кН;
Р1 = 77.18 кН;
Р2 = 248.6 кН;
Р3 = 555.1 кН;
Р4 = 492.5 кН;
РОX = 230.7 ∙ cos 3.5º = 230 кН;
РОY = 230.7 ∙ cos 86.5º = 14.1 кН;
Р1X = 77.18∙ cos 59.5º = 39.17 кН;
Р1Y = 77.18 ∙ cos 30.5º = 66.5 кН;
Р2X = 248.6 ∙ cos 0º = 248.6 кН;
Р2Y = 0 кН;
Р3X = 555.1 ∙ cos 60.5º = 273.3 кН;
Р3Y = 555.1 ∙ cos 29.5º = 483.3 кН;
Р4X = 492.5 ∙ cos 82.5 = 64.2 кН;
Р4Y = 492.5 ∙ cos 7.5º = 488.2 кН;
М1 = 77.18 ∙ 0.031 = 2.39 кНм;
М2 = 248.6 ∙ 0.319 = 79.3 кНм;
М3 = 555.1 ∙ 0.240 = 133.2 кНм;
М4 = 492.5 ∙ 0.15 = 73.8 кНм;
q1 = 6.75 кНм – распределенная нагрузка от веса рукояти;
q2 = 0.9 кНм – распределенная нагрузка от веса рукояти.
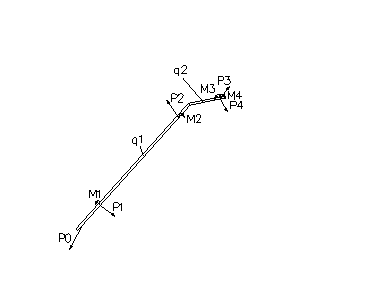
Рис. 19. Схема распределений усилий в рукояти.
Рассмотрим первый участок 0 ≤ Х1 ≤ 0.231 м:
а). -Q1∙(Х1) + РОY - q∙X1 = 0
Q1∙(Х1) = РОY - q∙X1
Q1∙(0) = РОY - q∙X1 = 14.1 – 0 = -14.1 кН
Q1∙(0.354) = РОY - q∙X1 = 14.1 – 6.75 ∙ 0.231 = 12.54 кН
б). М1∙(Х1) - РОY ∙(Х1)+ q∙X1 ∙( X1/2) = 0
М1∙(Х1) = РОY ∙(Х1) - q∙X1 ∙( X1/2)
М1∙(0) =- РОY ∙(Х1) - q∙X1 ∙( X1/2)= 0
М1∙(0.231) = РОY ∙(Х1) - q∙X1 ∙( X1/2)= 14.1 ∙(0.231) – 6.75∙0.231 ∙( 0.0.231/2)= 3.07 кНм
в). N1∙(Х1) - РОХ = 0
N1∙(Х1) = РОХ = 230 кН
Рассмотрим второй участок 0.231 м ≤ Х2 ≤ 1.74 м:
а). -Q2∙(Х2) + РОY -Р1Y - q∙X2 = 0
Q2∙(Х2) =- РОY - Р1Y - q∙X2
Q2∙(0.231) = РОY - Р1Y - q∙X2 = 14.1 – 66.5 – 6.75 ∙ 0.231 = -53.95 кН
Q2∙(1.74) = РОY - Р1Y - q∙X2 = -14.1 – 66.5 – 6.75 ∙ 1.74 = -64.145 кН
б). М2∙(Х2) - РОY ∙(Х2)+ Р1Y ∙(Х2 – l1)+ М1 + q∙X2∙( X2/2) = 0
М2∙(Х2) = РОY ∙(Х2) - Р1Y ∙(Х2 – l1) - М1 - q∙X2∙( X2/2)
М2∙(0.231) = РОY ∙(Х2) - Р1Y ∙(Х2 – l1) - М1 - q∙X2∙( X2/2) = 14.1 ∙(0.231) -
- 68.5∙(0) -2.39 – 6.75∙0.231 ∙( 0.231/2) = -0.68 кНм
М2∙(1.74) = - РОY ∙(Х2)- Р1Y ∙(Х2 – l1)- М1 - q∙X2∙( X2/2) = 14.1 ∙(1.74) -
- 68.5∙(1.74) -2.39 – 6.75∙1.74∙( 1.74/2) = -88.4 кНм
в). N1∙(Х2) - РОХ - Р1Х = 0
N1∙(Х2) = РОХ + Р1Х = 234.1 кН
Рассмотрим третий участок 1.74 м ≤ Х3 ≤ 2.52 м:
а). -Q3∙(Х3) + РОY - Р1Y - q∙X3 = 0
Q3∙(Х3) = РОY - Р1Y - q∙X3
Q3∙(1.75) = РОY - Р1Y - q∙X3= 14.1 – 66.5 -6.75∙1.74 = -64.14 кН
Q3∙(2.52) = = РОY - Р1Y - q∙X3= 14.1 – 66.5 -6.75∙2.52 = -69.41 кН
б). М3∙(Х3) - РОY ∙(Х3)+ Р1Y ∙(Х3 – l1)+ М1 + М2 + q∙X3∙( X3/2) = 03) - РОY ∙(Х3)+ Р1Y ∙(Х3 – l1)+ М1 + М2 + q∙X3∙( X3/2) = 0
М3∙(Х3) = РОY ∙(Х3) - Р1Y ∙(Х3 – l1) - М1 - М2 - q∙X3∙( X3/2)
М3∙(1.74) = 14.1 ∙(1.74) – 66.5∙(1.74 – 0.231) – 2.39 - 79.3-6.75∙2.52(1.74/2) = -167.37 кНм
М3∙(2.52) = 14.1 ∙(2.52) – 66.5∙(2.52– 0.231) – 2.39 - 79.3-6.75∙2.52 (2.52/2) = -219.8 кНм
в). N3∙(Х3) - РОХ - Р1Х +Р2Y = 0
N3∙(Х3) = РОХ +Р1Х -Р2Y = -4.5 кН
Рассмотрим четвертый участок 2.52 ≤ Х4 ≤ 2.7 м:
а). -Q4∙(Х4) + РОY - Р1Y +Р3Y - q∙X4 = 0
Q4∙(Х4) = РОY - Р1Y +Р3Y - q∙X4
Q4∙(2.52) = 14.1 -66.5+483.3-6.75∙2.52 = 413.89 кН
Q4∙(2.7) = 14.1 -66.5+483.3-6.75∙2.7 = 412.89 кН
б). М4∙(Х4) - М3 + М1+М2 – РОY ∙(Х4) + Р3Y ∙(Х-l1-l2) + q∙X4 ∙( X4/2) +
+ Р1Y ∙(Х-l1) = 0
М4∙(Х4) = М3 - М1-М2 + РОY ∙(Х4) - Р3Y ∙(Х-l1-l2) - q∙X4 ∙( X4/2) - Р1Y ∙(Х-l1)
М4∙(2.52) =133.2 – 2.39 – 79.3 -6.75∙2.52 (2.52/2)+ 14.1 ∙2.52 – 66.5∙(2.52– 0.231) +0 = -86.61 кНм
М4∙(2.7) = 133.2 – 2.39 – 79.3 -6.75∙2.7 (2.7/2)+ 14.1 ∙2.7 – 66.5∙(2.7 –0.231) + 483.3∙(2.7 –0.231) = - 12.2 кНм
в). N4∙(Х4) - РОХ - Р1Х +Р2Y + Р3Y = 0 N4∙(Х4) = РОХ +Р1Х -Р2Y - Р3Y = -252.73 кН
Рассмотрим пятый участок
0 ≤ Х5 ≤ 0.3 м:
а). –Q5∙(Х5) +Р4Y – q2∙X4 = 0
Q5∙(Х5) = -Р4Y + q2∙X4
Q4∙(0) = -Р4Y = -488.2 кН
Q4∙(0.3) = -488.2 -0.9∙0.3 = -487.93 кН
б). М4 + М5 – Р4 ∙(Х4) + q∙X5 ∙( X5/2) = 0
М5∙(0) = -73.8 кНм
М5∙(0.3) = – 73.8 -0.9∙0.3 (0.3/2)+ 488.3∙0.3 = - 72.6 кНм
в). N4∙(Х4) = -Р4Х = -64.2 кН
Произведем расчет пальцев проушин рукояти.
1. Расчет пальца проушины рукояти для крепления ковша:
Расчет производится на срез и изгиб.
Исходные данные:
DПАЛ = 75 мм – диаметр пальца;
LПАЛ = 250 мм – длина пальца (определяется исходя из ширины рукояти);
Определим площадь сечения пальца, мм2:
А ПАЛ = 0.785 ∙ d2 = 0.785 ∙ 752 = 4415.625 мм2
Определим момент осевой сопротивления пальца, мм3:
W ПАЛ = 0.785 ∙ r3 = 0.785 ∙ 37.53 = 41396.48 мм3
Зная значение усилия ковша РКОВ = 230.73 кН, определим τПАЛ, МПа:
τПАЛ = Рков / 2∙ А ПАЛ = 230730 / 2∙ 4415.625 = 26.1 МПа
Определим напряжение возникающие в пальце рукояти, МПа:
σПАЛ = Рков ∙ L ПАЛ /2 ∙ 2 ∙ W ПАЛ = 348.3 МПа
В качестве материала пальца используем сталь 40Х (термообработка – закалка и средний отпуск с пределом текучести 480 МПа). Напряжение в пальце от среза и изгиба не превышает допустимых. Напряжение среза и изгиба действуют в разных местах (изгиб – по середине пальца, срез – сбоку от проушины, поэтому напряжения действуют совместно.)
2. Расчет пальца проушины рукояти для крепления коромысла:
Расчет производится на срез и изгиб.
Исходные данные:
DПАЛ = 75 мм – диаметр пальца;
LПАЛ = 376 мм – длина пальца (определяется исходя из ширины рукояти);
Определим площадь сечения пальца, мм2:
А ПАЛ = 0.785 ∙ d2 = 0.785 ∙ 752 = 4415.625 мм2
Определим момент осевой сопротивления пальца, мм3:
W ПАЛ = 0.785 ∙ r3 = 0.785 ∙ 37.53 = 41396.48 мм3
Зная значение усилия от коромысла Ркор = 77.18 кН, определим τПАЛ, МПа:
τПАЛ = Ркор / 2∙ А ПАЛ = 77180 / 2∙ 4415.625 = 8.73 МПа
Определим напряжение возникающие в пальце рукояти, МПа:
σПАЛ = Ркор ∙ L ПАЛ /2 ∙ 2 ∙ W ПАЛ = 175.25 МПа
В качестве материала пальца используем сталь 40Х (термообработка – закалка и средний отпуск с пределом текучести 480 МПа). Напряжение в пальце от среза и изгиба не превышает допустимых. Напряжение среза и изгиба действуют в разных местах (изгиб – по середине пальца, срез – сбоку от проушины, поэтому напряжения действуют совместно.)
3. Расчет пальца проушины рукояти для крепления стрелы:
Расчет производится на срез и изгиб.
Исходные данные:
DПАЛ = 75 мм – диаметр пальца;
LПАЛ = 376 мм – длина пальца (определяется исходя из ширины рукояти);
Определим площадь сечения пальца, мм2:
А ПАЛ = 0.785 ∙ d2 = 0.785 ∙ 752 = 4415.625 мм2
Определим момент осевой сопротивления пальца, мм3:
W ПАЛ = 0.785 ∙ r3 = 0.785 ∙ 37.53 = 41396.48 мм3
Зная значение усилия стрелы РСТР = 555.1 кН, определим τПАЛ, МПа:
τПАЛ = Рстр / 2∙ А ПАЛ = 555100 / 2∙ 4415.625 = 62.85 МПа
Определим напряжение возникающие в пальце рукояти, МПа:
σПАЛ = Рстр ∙ L ПАЛ /2 ∙ 2 ∙ W ПАЛ = 1260 МПа
В качестве материала пальца используем сталь 40ХН σтек = 1450 МПа (термообработка – закалка и средний отпуск). Напряжение в пальце от среза и изгиба не превышает допустимых. Напряжение среза и изгиба действуют в разных местах (изгиб – по середине пальца, срез – сбоку от проушины, поэтому напряжения действуют совместно.)
4. Расчет пальца проушины рукояти для крепления гидроцилиндра рукояти:
Расчет производится на срез и изгиб.
Исходные данные:
DПАЛ = 75 мм – диаметр пальца;
LПАЛ = 250 мм – длина пальца (определяется исходя из ширины рукояти);
Определим площадь сечения пальца, мм2:
А ПАЛ = 0.785 ∙ d2 = 0.785 ∙ 752 = 4415.625 мм2
Определим момент осевой сопротивления пальца, мм3:
W ПАЛ = 0.785 ∙ r3 = 0.785 ∙ 37.53 = 41396.48 мм3
Зная значение усилия гидроцилиндра рукояти РГЦР = 492.5 кН, определим τПАЛ, МПа:
τПАЛ = Ргцр / 2∙ А ПАЛ = 492500 / 2∙ 4415.625 = 55.76 МПа
Определим напряжение возникающие в пальце рукояти, МПа:
σПАЛ = Ргцр ∙ L ПАЛ /2 ∙ 2 ∙ W ПАЛ = 743.5 МПа
В качестве материала пальца используем сталь 40Х σтек = 900 МПа (термообработка – закалка и средний отпуск). Напряжение в пальце от среза и изгиба не превышает допустимых. Напряжение среза и изгиба действуют в разных местах (изгиб – по середине пальца, срез – сбоку от проушины, поэтому напряжения действуют совместно.)
5. Расчет пальца проушины рукояти для крепления гидроцилиндра ковша:
Расчет производится на срез и изгиб.
Исходные данные:
DПАЛ = 75 мм – диаметр пальца;
LПАЛ = 250 мм – длина пальца (определяется исходя из ширины рукояти);
Определим площадь сечения пальца, мм2:
А ПАЛ = 0.785 ∙ d2 = 0.785 ∙ 752 = 4415.625 мм2
Определим момент осевой сопротивления пальца, мм3:
W ПАЛ = 0.785 ∙ r3 = 0.785 ∙ 37.53 = 41396.48 мм3
Зная значение усилия гидроцилиндра ковша Ргцк = 248.6 кН, определим τПАЛ, МПа:
τПАЛ = Ргцк / 2∙ А ПАЛ = 248600 / 2∙ 4415.625 = 28.15 МПа
Определим напряжение возникающие в пальце рукояти, МПа:
σПАЛ = Ргцк ∙ L ПАЛ /2 ∙ 2 ∙ W ПАЛ = 375 МПа
В качестве материала пальца используем сталь 40Х σтек = 900 Мпа (термообработка – закалка и средний отпуск). Напряжение в пальце от среза и изгиба не превышает допустимых. Напряжение среза и изгиба действуют в разных местах (изгиб – по середине пальца, срез – сбоку от проушины, поэтому напряжения действуют совместно.)
Определим сечение рукояти в шарнире соединения рукояти с ковшом
Определим размеры поперечного сечения рукояти. Рассмотрим сечение, его геометрические характеристики, размеры сечения, исходя из условий прочности.
1. F1 = b ∙ (H - h) = 0.196 ∙ (0.118 – 0.075) = 0.00843 м2
X1 = b / 2 = 0.098 м
Y1 = H / 2 = 0.059 м
2. F2 = Bh+2b ∙ (H - h) = 0.238 ∙ 0.023 + 2 ∙ 0.021 ∙ 0.021) =
= 0.00638 м2
X1 = B / 2 = 0.119 м
Y1 = Bh2+2b ∙ (H2 - h2) / 2(Bh+2b ∙ (H - h)) = 0.0147 м
Y1' = H - Y1 = 0.02985 м
1.F3 = Bh+2b ∙ (H - h) = 0.238 ∙ 0.023 + 2 ∙ 0.021 ∙ 0.021) =
= 0.00638 м2
X1 = B / 2 = 0.119 м
Y1 = Bh2+2b ∙ (H2 - h2) / 2(Bh+2b ∙ (H - h)) = 0.0147 м
Y1' = H - Y1 = 0.02985 м
Определим статические моменты каждой фигуры, а так же общие координаты YC:
SX = F1 ∙ Y1 + F2 ∙ Y2 + F3 ∙ Y3 = 0.001737 м3 YC = SX / ∑ Fобщ = 0.001737/ 0.021184 = 0.082 м
Определим моменты инерции сечения в отдельности и всего сечения в целом:
1. JX1 = b / 12 ∙ (H3 – h3) = 0.196 / 12 ∙ (0.1183 – 0.0753) = 0.000119673 м4
2. JX2 = Bh3 + 2 b ∙ (H – h) 3/ 12 + Bh(Y1 – h/2) 2 + 2 b ∙ (H – h) (H – h / 2 + h - Y1)= =0.000037432 м4
3. JX3 = Bh3 + 2 b ∙ (H – h) 3/ 12 + Bh(Y1 – h/2) 2 + 2 b ∙ (H – h) (H – h / 2 + h - Y1)= =0.000037432 м4
Учитывая поправку Штейнера получим:
JX2 + ( y2)2 F2 = 0.000066358 м4
JX3 + ( y3)2 F3 = 0.000066358 м4
JX общ =∑JXi = 0.000252389 м4
Определим момент сопротивления относительно нейтральной линии:
W = JX общ / YC = 0.00307 м3
Определим напряжения возникающие в сечение 1-1:
σ = N /Fвсего сечения = 10.8 МПа,
N = 230 кН;
Fвсего сечения = 0.021184 м2
σ ЭКВ = ![]() = 10.8 МПа
= 10.8 МПа
Определим сечение рукояти 2-2.
Определим размеры поперечного сечения рукояти 2-2. Рассмотрим сечение, его геометрические характеристики, размеры сечения, исходя из условий прочности.
F = HB - bh = 0.195 ∙ 0.238 – 0.149∙ 0.196 = 0.017206 м2
X1 = 0.119 м
Y1 = 0.0975 м
Определим момент инерции сечения:
JX = HB3 –b h3 / 12 = 9.3 ∙ 10-5 м4
Определим момент сопротивления сечения:
W = HB3 –b h3 / 6H = 0.000954 м3
Определим напряжения возникающие в сечение 2-2:
σ max= Mизг /W = 46 МПа,
где
Мизг = 44.54 кНм
τ = Q / ∑Fст = 9.43 МПа,
где
Q = 59.04 кН;
∑Fст = 0.006258 м2
σ = N /Fвсего сечения = 13.6 МПа,
где
N = 234.1 кН;
Fвсего сечения = 0.017206 м2
σ ЭКВ = ![]() = 61.7 МПа
= 61.7 МПа
Определим сечение рукояти в шарнире соединения рукояти с коромыслом 3-3.
Определим размеры поперечного сечения рукояти 3-3. Рассмотрим сечение, его геометрические характеристики, размеры сечения, исходя из условий прочности.
1. F1 = b ∙ (H - h) = 0.196 ∙ (0.135 – 0.075) = 0.01176 м2
X1 = b / 2 = 0.098 м
Y1 = H / 2 = 0.0675 м
1. F2 = Bh+2b ∙ (H - h) = 0.238 ∙ 0.023 + 2 ∙ 0.021 ∙ (0.0551 – 0.023) =
= 0.00682 м2
X1 = B / 2 = 0.119 м
Y1 = Bh2+2b ∙ (H2 - h2) / 2(Bh+2b ∙ (H - h)) = 0.0169 м
Y1' = H - Y1 = 0.0382 м
1. F3 = Bh+2b ∙ (H - h) = 0.238 ∙ 0.023 + 2 ∙ 0.021 ∙ (0.0849 – 0.023) =
= 0.0080738 м2
X1 = B / 2 = 0.119 м
Y1 = Bh2+2b ∙ (H2 - h2) / 2(Bh+2b ∙ (H - h)) = 0.02516 м
Y1' = H - Y1 = 0.05974 м
Определим статические моменты каждой фигуры, а так же общие координаты YC:
SX = F1 ∙ Y1 + F2 ∙ Y2 + F3 ∙ Y3 = 0.00273409 м3
YC = SX / ∑ Fобщ = 0.00273409/ 0.030576 = 0.09 м
Определим моменты инерции сечения в отдельности и всего сечения в целом:
1. JX1 = b / 12 ∙ (H3 – h3) = 0.196 / 12 ∙ (0.1353 – 0.0753) =
= 0.000033287 м4
2. JX2 = Bh3 + 2 b ∙ (H – h) 3/ 12 + Bh(Y1 – h/2) 2 + 2 b ∙ (H – h) (H – h / 2 + h - Y1)= = 0.000156 м4
3. JX3 = Bh3 + 2 b ∙ (H – h) 3/ 12 + Bh(Y1 – h/2) 2 + 2 b ∙ (H – h) (H – h / 2 + h - Y1)= = 0.000151 м4
Учитывая поправку Штейнера получим:
JX1 + ( y1)2 F1= 0.0000346 м4
JX2 + ( y2)2 F2 = 0.000192 м4
JX3 + ( y3)2 F3 = 0.000231 м4
JX общ =∑JXi = 0.000458 м4
Определим момент сопротивления относительно нейтральной линии:
W = JX общ / YC = 0.0051 м3
Определим напряжения возникающие в сечение 3-3:
σ max= Mизг /W = 0.13 МПа,
где
Мизг = 0.68 кНм
τ = Q / ∑Fст = 33.9 МПа,
где
Q = 53.95 кН;
∑Fст = 0.0015918 м2
σ = N /Fвсего сечения = 8.78 МПа,
где
N = 234.1 кН;
Fвсего сечения = 0.026656 м2
σ ЭКВ = ![]() = 59.3 МПа
= 59.3 МПа
Определим сечение рукояти 4-4.
Определим размеры поперечного сечения рукояти 4-4. Рассмотрим сечение, его геометрические характеристики, размеры сечения, исходя из условий прочности.
F = HB - bh = 0.022876 м2
X1 = 0.119 м
Y1 = 0.165 м
Определим момент инерции сечения:
JX = HB3 –b h3 / 12 = 0.0001925 м4
Определим момент сопротивления сечения:
W = HB3 –b h3 / 6H = 0.00161 м3
Определим напряжения возникающие в сечение 4-4:
σ max= Mизг /W = 27.6 МПа,
где
Мизг = 44.54 кНм
τ = Q / ∑Fст = 4.9 МПа,
где
Q = 59 кН;
∑Fст = 0.011928 м2
σ = N /Fвсего сечения = 10.2 МПа,
где
N = 234.1 кН;
Fвсего сечения = 0.022876 м2
σ ЭКВ = ![]() = 38.74 МПа
= 38.74 МПа
Определим сечение рукояти в шарнире соединения рукояти с стрелой.
Определим размеры поперечного сечения рукояти. Рассмотрим сечение, его геометрические характеристики, размеры сечения, исходя из условий прочности.
1. F1 = b ∙ (H - h) = 0.238 ∙ (0.135 – 0.075) = 0.0143 м2
X1 = b / 2 = 0.119 м
Y1 = H / 2 = 0.0675 м
2. F2 = Bh+2b ∙ (H - h) = 0.238 ∙ 0.023 + 2 ∙ 0.021 ∙ (0.303 – 0.023) =
= 0.01723 м2
X1 = B / 2 = 0.119 м
Y1 = Bh2+2b ∙ (H2 - h2) / 2(Bh+2b ∙ (H - h)) = 0.0115 м
Y1' = H - Y1 = 0.188 м
Определим статические моменты каждой фигуры, а так же общие координаты YC:
SX = F1 ∙ Y1 + F2 ∙ Y2 = 0.0073 м3
YC = SX / ∑ Fобщ = 0.0073/ 0.03153 = 0.232 м
Определим моменты инерции сечения в отдельности и всего сечения в целом:
1. JX1 = b / 12 ∙ (H3 – h3) = 0.238 / 12 ∙ (0.1353 – 0.0753) = 0.0000404 м4 2. JX2 = Bh3 + 2 b ∙ (H – h) 3/ 12 + Bh(Y1 – h/2) 2 + 2 b ∙ (H – h) (H – h / 2 + h - Y1)= = 0.00070024 м4
Учитывая поправку Штейнера получим:
JX1 + ( y1)2 F1= 0.000314 м4
JX2 + ( y2)2 F2 = 0.000936 м4
JX общ =∑JXi = 0.00125 м4
Определим момент сопротивления относительно нейтральной линии:
W = JX общ / YC = 0.00538 м3
Определим напряжения возникающие в сечение 5-5:
σ max= Mизг /W = 16 МПа,
где
Мизг = 86.6 кНм
τ = Q / ∑Fст = 35.1 МПа,
где
Q = 413 кН;
∑Fст = 0.01176 м2
σ = N /Fвсего сечения = 8 МПа,
где
N = 252.7 кН;
Fвсего сечения = 0.03153 м2
σ ЭКВ = ![]() = 65 МПа
= 65 МПа
2.9 Расчет металлоконструкции стрелы
Определим наиболее нагруженное положение стрелы.
В положении 3Р будет максимальное усилие действующие на шарнир В (стрела и рукоять) от рукояти.
Зная значения максимального усилия гидроцилиндра стрелы, гидроцилиндра рукояти, усилия в шарнире соединения стрелы с рукоятью, методом плана сил определим силы, которые действуют в шарнирах стрелы. Все построения для определения сил, выполним в масштабе.
Воспользовавшись методом плана сил, мы определили значение и направление силы Р1 = 790.6 кН.
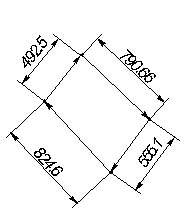
Рис.20 План сил возникающих в стреле.
Выполним проверку:
ΣFx = 0;
ΣFy = 0;
ΣFx = 0
Р4 = 555.1 · cos 54º = -324 кН;
Р3 = 492.5 · cos 51.5º = 308.6 кН;
Р2 = 824.6 · cos 47º = -560 кН;
Р1 = 790.6 · cos 43.5º= 575.4 кН.
308.6 – 324 + 575.4 – 560 = 0
ΣFy = 0
Р4 = 555.1 · cos36º = -448 кН;
Р3 = 492.5 · cos 38.5º = 387 кН;
Р2 = 824.6 · cos 43º = 604 кН;
Р1 = 790.6 · cos 46.5º = -543 кН;
Исходные данные для расчета стрелы:
Р1 = 790.6 кН;
Р2 = 824.6 кН;
Р3 = 492.5 кН;
Р4 = 555.1 кН;
Р1X = 790.6∙ cos 20º = 742.9 кН;
Р1Y = 790.6∙ cos 80º = 137.28 кН;
Р2X = 824.6 ∙ cos 85.5º = 800 кН;
Р2Y = 824.5 ∙ cos 4.5º = 199.48 кН;
Р3X = 492.5 ∙ cos 4º = 491.3 кН;
Р3Y = 492.5 ∙ cos 86º = 34.3 кН;
Р4X = 555.1 ∙ cos 7.5º = 550.3 кН;
Р4Y = 555.1 ∙ cos 82.5º = 72.45 кН;
М1 = 492.5∙ 0.422 = 207.8 кНм;
q1 = 5.36 кНм – распределенная нагрузка от веса стрелы (для второго участка);
q2 = 8.99кНм – распределенная нагрузка от веса стрелы (для второго участка);
Схема распределений усилий в стреле.
Рассмотрим первый участок 0 ≤ Х1 ≤ 2.35 м:
а). Q1∙(Х1) + Р1Y + q1 ∙X1 = 0
Q1∙(Х1) = - Р1Y – q1 ∙X1
Q1∙(0) = - Р1Y – q1 ∙X1 = -137.28 – 0 = -137.28 кН
Q1∙(2.35) = - Р1Y – q1 ∙X1 = -137.28 – 2.35 ∙ 5.36 = -149.08 кН
б). М1∙(Х1) + Р1Y ∙(Х1)+ q1 ∙X1 ∙( X1/2) = 0
М1∙(Х1) = - Р1Y ∙(Х1) – q1 ∙X1 ∙( X1/2)
М1∙(0) = - Р1Y ∙(Х1) – q1 ∙X1 ∙( X1/2)= 0
М1∙(2.35) = - Р1Y ∙(Х1) – q1∙X1 ∙( X1/2)= - 137.28 ∙(2.35) – 2.35 ∙ 5.36 ∙( 2.35/2)= -337.4 кНм
в). N1∙(Х1) – Р1Х = 0
N1∙(Х1) = Р1Х = 742.9 кН
Рассмотрим второй участок 2.35 м ≤ Х2 ≤ 2.4 м:
а). Q2∙(Х2) + Р1Y - Р2Y + q1∙X = 0
Q2∙(Х2) = - Р1Y + Р2Y - q1∙X2
Q2∙(2.35) = 199.48 - 137.28 - 5.36∙2.35 = 49.6 кН
Q2∙(2.4) = 199.48 - 137.28 - 5.36∙2.4 = 49.3 кН
б). М2∙(Х2) + Р1Y ∙(Х2) - Р2Y ∙(Х2 – l1) + q1 Х2 (Х2 – l1) = 0
М2∙(Х2) = - Р1Y ∙(Х2) - Р2Y ∙(Х2 – l1) - q1∙ Х2 (Х2 – l1)
М2∙(2.35) = 0 – 137.28∙2.35 – 5.36∙2.35∙(2.35/2) = - 337.4 кНм
М2∙(2.4) = 199.48∙(2.4 – 2.35) – 137.28∙2.4 – 5.36∙2.4∙(2.4/2) = -334.9кНм
в). N1∙(Х2) – Р1Х + Р2Х = 0 N1∙(Х2) = Р1Х – Р2Х = 742.9 – 800 = -57.1 кН
Рассмотрим третий участок 0 м ≤ Х3 ≤ 1.83 м:
а). Q3∙(Х3) – Р4Y - q2 ∙ X3 = 0
Q3∙(Х3) = Р4Y +q2 ∙ X3
Q3∙(0) = Р4Y + q2 ∙X3 = 72.45 кН
Q3∙(1.83) = Р4Y + q2 ∙X3 = 72.45 + 8.99∙1.83= 88.9 кН
б). - М3∙(Х3) – Р4Y ∙(Х3) – q2 ∙X3∙( X3/2) = 0
М3∙(Х3) = – Р4Y ∙(Х3) – q2 ∙X3∙( X3/2)
М3∙(0) = 0 кНм
М3∙(1.83) = – Р4Y ∙(Х3) – q2 ∙X3∙( X3/2)= - 8.99 ∙1.83 ∙ (1.83 /2) – 72.45∙1.83 = -269.1 кНм
в). N3∙(Х3) + Р4Х = 0 N3∙(Х3) = - Р4Х = - 550.3 кН
Рассмотрим четвертый участок 1.83 ≤ Х4 ≤ 2.64 м:
а). Q4∙(Х4) + Р3Y – Р4Y - q∙X4 = 0 Q4∙(Х4) = - Р3Y + Р4Y + q∙X4
Q4∙(1.83) = - Р3Y + Р4Y + q∙X4 = 8.99 ∙1.83 + 72.45 - 34.3 = 54.6 кН
Q4∙(2.64) = - Р3Y + Р4Y + q∙X4 = 8.99 ∙2.64 + 72.45 - 34.3= 61.88 кН
б). - М4∙(Х4) – М1 – Р4Y ∙(Х4) + Р3Y ∙(Х4 – l1) - q∙X4 ∙( X4/2) = 0
М4∙(Х4) = – М1 – Р4Y ∙(Х4) + Р3Y ∙(Х4 – l1) - q∙X4 ∙( X4/2)
М4∙(1.83) =- 207.8 – 72.45 ∙(1.83) + 0 – 8.99∙1.83 ∙( 1.83/2) = - 355.43 кНм
М4∙(2.64) =- 207.8 – 72.45 ∙(2.64) + 34.3(2.64-1.83) – 8.99∙2.64 ∙( 2.64/2) = =- 402.6 кНм
в). N4∙(Х4) – Р3Х + Р4Х = 0
N4∙(Х4) = Р3Х - Р4Х = 491.3 – 550.3 = - 59 кН
Произведем расчет пальцев проушин стрелы.
1. Расчет пальца проушины стрелы для крепления рукояти:
Расчет производится на срез и изгиб.
Исходные данные:
DПАЛ = 75 мм – диаметр пальца;
LПАЛ = 376 мм – длина пальца (определяется исходя из ширины рукояти);
Определим площадь сечения пальца, мм2:
А ПАЛ = 0.785 ∙ d2 = 0.785 ∙ 752 = 4415.625 мм2
Определим момент осевой сопротивления пальца, мм3:
W ПАЛ = 0.785 ∙ r3 = 0.785 ∙ 37.53 = 41396.48 мм3
Зная значение усилия в шарнире стрелы РРУК = 555.1 кН, определим τПАЛ, МПа:
τПАЛ = Ррук / 2∙ А ПАЛ = 555100 / 2∙ 4415.625 = 62.85 МПа
Определим напряжение возникающие в пальце стрелы, МПа:
σПАЛ = Ррук ∙ L ПАЛ /2 ∙ 2 ∙ W ПАЛ = 1260 МПа
В качестве материала пальца используем сталь 40ХН σтек = 1450 МПа (термообработка – закалка и средний отпуск). Напряжение в пальце от среза и изгиба не превышает допустимых. Напряжение среза и изгиба действуют в разных местах (изгиб – по середине пальца, срез – сбоку от проушины, поэтому напряжения действуют совместно.)
2. Расчет пальца проушины стрелы для крепления гидроцилиндра рукояти:
Расчет производится на срез и изгиб.
Исходные данные:
DПАЛ = 70 мм – диаметр пальца;
LПАЛ = 236 мм – длина пальца;
Определим площадь сечения пальца, мм2:
А ПАЛ = 0.785 ∙ d2 = 0.785 ∙ 702 = 3846.5 мм2
Определим момент осевой сопротивления пальца, мм3:
W ПАЛ = 0.785 ∙ r3 = 0.785 ∙ 353 = 33656.875 мм3
Зная значение усилия гидроцилиндра стрелы РГЦР = 492.5 кН, определим τПАЛ, МПа:
τПАЛ = Ргцр / 2∙ А ПАЛ = 492500 / 2∙ 3846.5 = 64 МПа
Определим напряжение возникающие в пальце рукояти, МПа:
σПАЛ = Ргцр ∙ L ПАЛ /2 ∙ 2 ∙ W ПАЛ = 702 МПа
В качестве материала пальца используем сталь 40Х σтек = 900 МПа (термообработка – закалка и средний отпуск). Напряжение в пальце от среза и изгиба не превышает допустимых. Напряжение среза и изгиба действуют в разных местах (изгиб – по середине пальца, срез – сбоку от проушины, поэтому напряжения действуют совместно.)
3. Расчет пальца проушины стрелы для крепления гидроцилиндра стрелы:
Расчет производится на срез и изгиб.
Исходные данные:
DПАЛ = 120 мм – диаметр пальца;
LПАЛ = 376 мм – длина пальца (определяется исходя из ширины стрелы);
Определим площадь сечения пальца, мм2:
А ПАЛ = 0.785 ∙ d2 = 0.785 ∙ 1202 = 11304 мм2
Определим момент осевой сопротивления пальца, мм3:
W ПАЛ = 0.785 ∙ r3 = 0.785 ∙ 603 = 169560 мм3
Зная значение усилия гидроцилиндра стрелы РСТР = 824.6 кН, определим τПАЛ, МПа:
τПАЛ = Рстр / 2∙ А ПАЛ = 824600 / 2∙ 11304 = 36 МПа
Определим напряжение возникающие в пальце стрелы, МПа:
σПАЛ = Рстр ∙ L ПАЛ /2 ∙ 2 ∙ W ПАЛ = 457 МПа
В качестве материала пальца используем сталь 40Х σтек = 900 МПа (термообработка – закалка и средний отпуск). Напряжение в пальце от среза и изгиба не превышает допустимых. Напряжение среза и изгиба действуют в разных местах (изгиб – по середине пальца, срез – сбоку от проушины, поэтому напряжения действуют совместно.)
4. Расчет пальца проушины для крепления стрелы к базе экскаватора:
Расчет производится на срез и изгиб.
Исходные данные:
DПАЛ = 120 мм – диаметр пальца;
LПАЛ = 595 мм – длина пальца (определяется исходя из ширины стрелы);
Определим площадь сечения пальца, мм2:
А ПАЛ = 0.785 ∙ d2 = 0.785 ∙ 1202 = 11304 мм2
Определим момент осевой сопротивления пальца, мм3:
W ПАЛ = 0.785 ∙ r3 = 0.785 ∙ 603 = 169560 мм3
Зная значение усилия в шарнире стрелы РБ = 790.6 кН, определим τПАЛ, МПа:
τПАЛ = Рб / 2∙ А ПАЛ = 790600 / 2∙ 11304 = 34.9 МПа
Определим напряжение возникающие в пальце стрелы, МПа:
σПАЛ = Рб ∙ L ПАЛ /2 ∙ 2 ∙ W ПАЛ = 693.5 МПа
В качестве материала пальца используем сталь 40Х σтек = 900 МПа (термообработка – закалка и средний отпуск). Напряжение в пальце от среза и изгиба не превышает допустимых. Напряжение среза и изгиба действуют в разных местах (изгиб – по середине пальца, срез – сбоку от проушины, поэтому напряжения действуют совместно.)
Определим сечение стрелы в шарнире соединения стрелы с базой экскаватора 1-1.
Определим размеры поперечного сечения стрелы 1-1. Рассмотрим сечение, его геометрические характеристики, размеры сечения, исходя из условий прочности.
1. F1 = b ∙ (H - h) = 0.595 ∙ (0.234 – 0.120) = 0.06783 м2
X1 = b / 2 = 0.2975 м
Y1 = H / 2 = 0.117 м
Определим момент инерции сечения:
JX1 = b / 12 ∙ (H3 – h3) = 0.595 / 12 ∙ (0. 2343 – 0. 1203) = 0.0005536 м4
Определим момент сопротивления относительно нейтральной линии:
W = b / 6Н ∙ (H3 – h3) =0.00469 м3
Определим напряжения возникающие в сечение 1-1:
σ = N /Fвсего сечения = 10.9 МПа,
N = 742.9 кН;
Fвсего сечения = 0.06783 м2
σ ЭКВ = ![]() = 10.9 МПа
= 10.9 МПа
Определим сечение стрелы 2-2.
Определим размеры поперечного сечения стрелы 2-2. Рассмотрим сечение, его геометрические характеристики, размеры сечения, исходя из условий прочности.
F = HB - bh = 0.369 ∙ 0.340 – 0.323∙ 0.298 = 0.029206 м2
X1 = 0.17 м
Y1 = 0.1845 м
Определим момент инерции сечения:
JX = HB3 –b h3 / 12 = 0.000496 м4
Определим момент сопротивления сечения:
W = HB3 –b h3 / 6H = 0.002919 м3
Определим напряжения возникающие в сечение 2-2:
σ max= Mизг /W = 57.79 МПа,
где
Мизг = 168.7 кНм
τ = Q / ∑Fст = 10.55 МПа,
Q = 143.18 кН;
∑Fст = 0.013566 м2
σ = N /Fвсего сечения = 12.7 МПа,
где
N = 371.45 кН;
Fвсего сечения = 0.029206 м2
σ ЭКВ = ![]() = 72.85 МПа
= 72.85 МПа
Определим сечение стрелы в шарнире соединения стрелы с гидроцилиндром стрелы 3-3.
Определим размеры поперечного сечения стрелы 3-3. Рассмотрим сечение, его геометрические характеристики, размеры сечения, исходя из условий прочности.
1. F1 = b ∙ (H - h) = 0.298 ∙ (0.200 – 0.120) = 0.02384 м2
X1 = b / 2 = 0.149 м
Y1 = H / 2 = 0.1 м
1. F2 = Bh+2b ∙ (H - h) = 0.340 ∙ 0.023 + 2 ∙ 0.021 ∙ (0.1675 – 0.023) =
= 0.013889 м2
X1 = B / 2 = 0.17 м
Y1 = Bh2+2b ∙ (H2 - h2) / 2(Bh+2b ∙ (H - h)) = 0.0483 м
Y1' = H - Y1 = 0.1192 м
2. F3 = Bh+2b ∙ (H - h) = 0.340 ∙ 0.023 + 2 ∙ 0.021 ∙ (0.1675 – 0.023) =
= 0.013889 м2
X1 = B / 2 = 0.17 м
Y1 = Bh2+2b ∙ (H2 - h2) / 2(Bh+2b ∙ (H - h)) = 0.0483 м
Y1' = H - Y1 = 0.1192 м
Определим моменты инерции сечения в отдельности и всего сечения в целом:
1. JX1 = b / 12 ∙ (H3 – h3) = 0.298 / 12 ∙ (0.23 – 0.123) = 0.000155754 м4
2. JX2 = Bh3 + 2 b ∙ (H – h) 3/ 12 + Bh(Y1 – h/2) 2 + 2 b ∙ (H – h) (H – h / 2 + h - Y1)= = 0.000306433 м4
3. JX3 = Bh3 + 2 b ∙ (H – h) 3/ 12 + Bh(Y1 – h/2) 2 + 2 b ∙ (H – h) (H – h / 2 + h - Y1)= = 0.000306433 м4
Учитывая поправку Штейнера получим:
JX2 + ( y2)2 F2 = 0.000446 м4
JX3 + ( y3)2 F3 = 0.000446 м4
JX общ =∑JXi = 0.00105 м4
Определим момент сопротивления относительно нейтральной линии:
W = JX общ / YC = 0.00461 м3
Определим напряжения возникающие в сечение 3-3:
σ max= Mизг /W = 73.18 МПа,
где
Мизг = 337.4 кНм
τ = Q / ∑Fст = 31.5 МПа,
Q = 49.6 кН;
∑Fст = 0.0015918 м2
σ = N /Fвсего сечения = 1.1 МПа,
где
N = 57.1 кН;
Fвсего сечения = 0.051618 м2
σ ЭКВ = ![]() = 74.3 МПа
= 74.3 МПа
Определим сечение стрелы 4-4.
Определим размеры поперечного сечения стрелы 4-4. Рассмотрим сечение, его геометрические характеристики, размеры сечения, исходя из условий прочности.
F = HB - bh = 0.00588 м2
X1 = 0.170 м
Y1 = 0.2275 м
Определим момент инерции сечения:
JX = HB3 –b h3 / 12 = 0.000588 м4
Определим момент сопротивления сечения:
W = HB3 –b h3 / 6H = 0.00346 м3
Определим напряжения возникающие в сечение 4-4:
σ max= Mизг /W = 97.15 МПа,
где
Мизг = 336.15 кНм
τ = Q / ∑Fст = 2.8 МПа,
где
Q = 49.6 кН;
∑Fст = 0.017178 м2
σ = N /Fвсего сечения = 9.71 МПа,
где
N = 57.1 кН;
Fвсего сечения = 0.00588 м2
σ ЭКВ = ![]() = 106.96 МПа
= 106.96 МПа
Определим сечение стрелы 5-5.
Определим размеры поперечного сечения стрелы 5-5. Рассмотрим сечение, его геометрические характеристики, размеры сечения, исходя из условий прочности.
F = HB - bh = 0.0031138 м2
X1 = 0.170 м
Y1 = 0.2075 м
Определим момент инерции сечения:
JX = HB3 –b h3 / 12 = 0.000545508 м4
Определим момент сопротивления сечения:
W = HB3 –b h3 / 6H = 0.00320887 м3
Определим напряжения возникающие в сечение 5-5:
σ max= Mизг /W = 46 МПа,
где
Мизг = 147.63 кНм
τ = Q / ∑Fст = 5.73 МПа,
где
Q = 88.9 кН;
∑Fст = 0.015498 м2
σ = N /Fвсего сечения = 176.7 МПа,
где
N = 550.3 кН;
Fвсего сечения = 0.0031138 м2
σ ЭКВ = ![]() = 222.92 МПа
= 222.92 МПа
Определим сечение стрелы 6-6.
Определим размеры поперечного сечения стрелы 6-6. Рассмотрим сечение, его геометрические характеристики, размеры сечения, исходя из условий прочности.
F = HB - bh = 0.0028282 м2
X1 = 0.170 м
Y1 = 0.1735 м
Определим момент инерции сечения:
JX = HB3 –b h3 / 12 = 0.000472746 м4
Определим момент сопротивления сечения:
W = HB3 –b h3 / 6H = 0.00278086 м3
Определим напряжения возникающие в сечение 6-6:
σ max= Mизг /W = 48.38 МПа,
где
Мизг = 134.55 кНм
τ = Q / ∑Fст = 5.2 МПа,
где
Q = 66.137 кН;
∑Fст = 0.012642 м2
σ = N /Fвсего сечения = 27.8 МПа,
где
N = 78.6 кН;
Fвсего сечения = 0.0028282 м2
σ ЭКВ = ![]() = 76.7 МПа
= 76.7 МПа
Определим сечение стрелы в шарнире соединения стрелы с рукоятью 7-7.
Определим размеры поперечного сечения стрелы 7-7. Рассмотрим сечение, его геометрические характеристики, размеры сечения, исходя из условий прочности.
F = hb = 0.067 ∙ 0.064 = 0.004288 м2
X1 = b / 2 = 0.032 м
Y1 = h / 2 = 0.0335 м
Определим моменты инерции сечения в отдельности и всего сечения в целом:
Учитывая поправку Штейнера получим JX :
JX = (b h3 / 12+ F ∙ (y) 2) ∙ 4 = 0.000352268 м4
Определим момент сопротивления относительно нейтральной линии:
W = JX / YC = 0.0033709 м3
Определим напряжения возникающие в сечение 7-7:
τ = Q / ∑Fст = 7.23 МПа,
где
Q = 124 кН;
∑Fст = 0.017152 м2
σ = N /Fвсего сечения = 27.05 МПа,
где
N = 463.9 кН;
Fвсего сечения = 0.017152 м2
σ ЭКВ = ![]() = 29.8 МПа
= 29.8 МПа
По окончанию расчетов рукояти, стрелы и ковша примем сталь марки 09Г2С ГОСТ 19282-73 с пределом текучести 305 МПа, которая рекомендуется в "РД 2201…86" для проектирования металлоконструкции экскаватора.
Заключение
В проекте, в соответствии с темой "Проектирование рабочего оборудования одноковшового экскаватора", было спроектировано рабочее оборудование экскаватора, состоящие из стрелы, рукояти и ковша, тяги, коромысла с привязанными к ним гидроцилиндрами. Для осуществления данного проекта проведены расчеты:
- разработка базовой части гусеничного экскаватора;
- определение основных параметров рабочего оборудования;
- расчет рабочего оборудования;
- расчет параметров ковша;
- расчет объёмного гидропривода рабочего оборудования экскаватора;
- расчет параметров насосно- силовой установки. Выбор типоразмеров насосов и первичного двигателя;
- расчет металлоконструкции рабочего оборудования;
В результате данных расчетов получили основные характеристики экскаватора:
- объём ковша – 0.4 м3;
- глубина копания – 5.91 м;
- максимальная высота выгрузки – 4.6 м;
- максимальный радиус копания – 8.9 м;
- угол поворота рабочего оборудования - 360º;
экскаватор ковш гидроцилиндр металлоконструкция
Список литературы
1. Крикун В.Я., Манасян В.Г. "Расчет основных параметров гидравлических экскаваторов с рабочим оборудованием обратная лопата" Издание первое – М., "Издательство Ассоциации строительных вузов", 2001 г.
2. Анурьев В.И. " Справочник конструктора-машиностроителя", т.1. М., "Машиностроение", 1979 г.
3. Анурьев В.И. " Справочник конструктора-машиностроителя", т.2. М., "Машиностроение", 1980 г.
4. Анурьев В.И. " Справочник конструктора-машиностроителя", т.3. М., "Машиностроение", 1981 г.
5. Крикун В.Я., "Привязка гидравлических цилиндров копающих механизмов к рабочему оборудованию экскаватора" – М., "Строительные и дорожные машины", 1997 г.
| Проект модернизации одноковшового экскаватора с целью повышения ... | |
|
Проект модернизации одноковшового экскаватора с целью повышения производительности и экономической эффективности 1 ОБЛАСТЬ ПРИМЕНЕНИЯ Типовая ... Прямая лопата представляет собой открытый сверху ковш с режущим передним краем, жестко насаженный на рукоять, которая шарнирно соединена со стрелой машины и выдвигается вперед с ... Современные модели экскаваторов с обратной лопатой имеют гидропривод, позволяющий ковшу поворачиваться относительно рукояти. |
Раздел: Рефераты по транспорту Тип: курсовая работа |
| Одноковшовые экскаваторы. Башенные краны. Погрузочно-разгрузочные ... | |
|
Федеральное агентство по образованию Государственное образовательное учреждение Высшего профессионального образования "Ярославский государственный ... По виду рабочего оборудования экскаваторы подразделяются на одноковшовые с жёсткой шарнирно-скользящей связью ковша со стрелой (прямая лопата), с жёсткой шарнирной связью ковша со ... Удельная мощность приводного двигателя 60 - 80 квт на 1 м3 ёмкости ковша, давление на грунт 0,15-0,25 МПа, скорость хода 0,6-1,5 км/ч. Гидравлические карьерные экскаваторы имеют ... |
Раздел: Промышленность, производство Тип: курсовая работа |
| Проектирование строительства завода цинкования мелкоразмерных ... | |
|
Содержание 1. Задание 2. Введение 3. Общие исходные данные 4. Функционально-технологические условия 5.Технико-экономическое обоснование принятого ... Рассчитаем прикрепление опорной раскоса 1,24 имеющего сечение 2 L 100х14 и расчётное усилие 649.72 Кн, конструктивная длина швов(kf = 8 мм): h - расстояние от оголовка стрелы до плоскости, проходящей через точку опорного контура - 25м. |
Раздел: Рефераты по строительству Тип: дипломная работа |
| Проект модернизации одноковшового экскаватора с целью повышения ... | |
|
Введение Дальнейшее развитие железнодорожного транспорта нашей страны требует повышения эффективности производства и непрерывного его обновления на ... Заполнение ковша обратной лопаты грунтом осуществляется при помощи гидроцилиндров рукояти и ковша. Грузоподъемность грейфера возможная по усилий двух гидроцилиндров стрелы на 370 даН меньше грузоподъемности ковша обратной лопаты, так как вес грейфера на 370 кгс больше ковша ... |
Раздел: Промышленность, производство Тип: дипломная работа |
| Автомобильный кран | |
|
Введение 1.1 Область применения (использования). Автомобильный кран 16т на шасси КамАЗ-53213, гидравлический, предназначен для выполнения погрузочно ... - стреловое оборудование: канат D = 16,5мм, крюковая подвеска с крюком грузоподъёмностью 16тонн, стрела, гидроцилиндр подъёма стрелы. Составные части сечения стрелы подбирается таким образом, чтобы прогиб стрелы, при максимальном её нагружении, не превышал 2% от длины стрелы. |
Раздел: Рефераты по транспорту Тип: дипломная работа |