Курсовая работа: Трасса сборки печатных плат
Автоматизировать процесс установки радиоэлементов на печатную плату (ПП)
Состав задания
1.сравнить варианты компоновки установки сборки печатных плат: позиционирует только сборочный манипулятор (М), позиционируют М, ПП и магазин с радиоэлементами. Обосновать выбор предпочтительного варианта по ТЭП (производительность, надёжность, стоимость проекта, удобство обслуживания и ремонта и др.).
2.Разработать циклограмму работы установки сборки ПП и дать ее описание с помощью логических уравнений.
3.Построить имитационную модель установки сборки ПП с использованием сети Петри. Дать первоначальную маркировку сети и представить фрагмент графа достижимости (3..4 шага), составить матрицы входных и выходных инциденций.
4.Разработать программу функционирования модели с учётом следующих ситуаций:
– М имеет 1,2,3,4 захвата;
– М позиционирует по двум координатам X и Y, а ПП и пенальный магазин (ПМ) неподвижны;
– М позиционирует только по координате X, а ПП и ПМ – по координате Y.
5.Разработать функциональную схему устройства управления (УУ) по логическим уравнениям (допускается фрагмент схемы). Дать рекомендацию по выбору элементной базы логической части УУ (контактная, бесконтактная, программируемый контроллер).
6.Составить общую структурную схему системы управления (СУ) и обосновать выбор аппаратной или программной реализации алгоритма управления объектом.
7.Составить перечень исполнительных механизмов и обосновать для них выбор подходящего типа привода (электрический, пневматический, гидравлический, комбинированный).
8.Представить схему подачи ПП в позицию сборки и фиксации её.
9.Разработать конструктивную схему захватного устройства для ИМС со штырьковыми выводами.
10.Предложить принцип контроля правильности установки выводов ИМС в отверстия ПП (ИМС с деформированными выводами должна быть отбракована).
Исходные данные.
Начало цикла – подача из накопителя ПП в позицию сборки.
Окончание цикла – выгрузка собранной ПП в накопитель.
Тактовое время установки ИМС на ПП – не более 1,5 секунд.
Масса радиоэлемента – порядка 20..30 г.
Производство серийное.
1.ЦИКЛОГРАММА РАБОТЫ ТРАССЫ
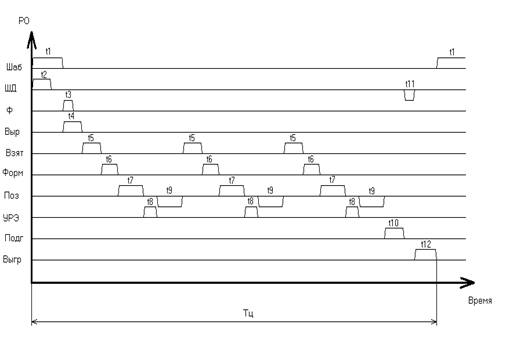
Рис.1 Циклограмма работы трассы.
Примечание: время цикла ТЦ – время, необходимое на выпуск одной ПП, т.е. периодичность сборки.
Обозначения
Шаб – подача шабером ПП из магазина ПП.
ШД – подача на 1 шаг ленты с резисторами.
Ф – фиксация ПП в позиции сборки.
Выр – вырубка резистора из ленты.
Взят – взятие манипулятором радиоэлемента.
Форм – формовка выводов радиоэлементов.
Поз – позиционирование для установки радиоэлемента.
УРЭ – установка радиоэлемента на ПП.
Подг – общий подгиб выводов радиоэлементов.
Выгр – выгрузка собранной ПП в накопитель собранных плат.
СОБЫТИЯ:
t1 – ПП подана шабером из магазина.
t2 – лента с резисторами отмотана на 1 шаг.
t3 – ПП зафиксирована.
t4 – резистор вырублен из липкой ленты.
t5– радиоэлемент взят захватным устройством манипулятора.
t6 – выводы радиоэлемента отформованы.
t7– ПП выставлена в нужную точку по координатам X,Y..
t8 – радиоэлемент установлен на ПП.
t9 – манипулятор перешёл в позицию выдачи следующего радиоэлемента.
t10 – произведён общий подгиб выводов радиоэлементов.
t11 – ПП расфиксирована.
t12 – ПП выгружена в накопитель собранных плат.
2.Имитационная модель автомата сборки с использованием сети Петри
| Название условия | № | № | Название события | |
| Наличие ПП в магазине | P1 |
|
t1 | ПП подана шабером на место сборки |
| Свободно место сборки | P2 |
|
t2 | Лента с резисторами смотана на один шаг |
| Привод подачи ленты резисторов исправен |
|
t3 | ПП зафиксирована | |
| Фиксатор работает нормально |
|
t4 | Резистор вырублен из ленты | |
| Устройство по вырубке резисторов исправно |
|
|
t5 | Радиоэлемент взят ЗУ манипулятора |
| ЗУ манипулятора в позиции выдачи радиоэлемента |
|
|
t6 | Выводы радиоэлемента отформованы |
| Радиоэлемент можно брать с помощью манипулятора |
|
t7 | ПП выставлена в нужную точку | |
| Наличие ЗУ с радиоэлементом в позиции формовки выводов. |
|
t8 | Радиоэлемент установлен на ПП | |
| Устройство по формовке выводов исправно | P9 |
|
t9 | манипулятор перешёл в позицию выдачи следующего радиоэлемента |
| ПП позиционирует по координатам X,Y |
|
|
t10 | произведён общий подгиб выводов радиоэлементов |
| Правильное совмещение выводов радиоэлементов и отверстий ПП |
|
t11 | ПП расфиксирована | |
| Установлены все радиоэлементы | P12 |
|
t12 | ПП выгружена в накопитель собранных плат |
| Устройство по подгибу выводов исправно | P13 | |||
| Фиксатор работает нормально | P14 | |||
| Исправен выгружающий робот | Р15 | |||
| Наличие свободного места в накопителе собранных ПП | Р16 |
 P4
P4 P5
P5
 P6
P6
 P7
P7 P8
P8
 P10
P10
 P11
P11
Табл. 1 Таблица условий и событий
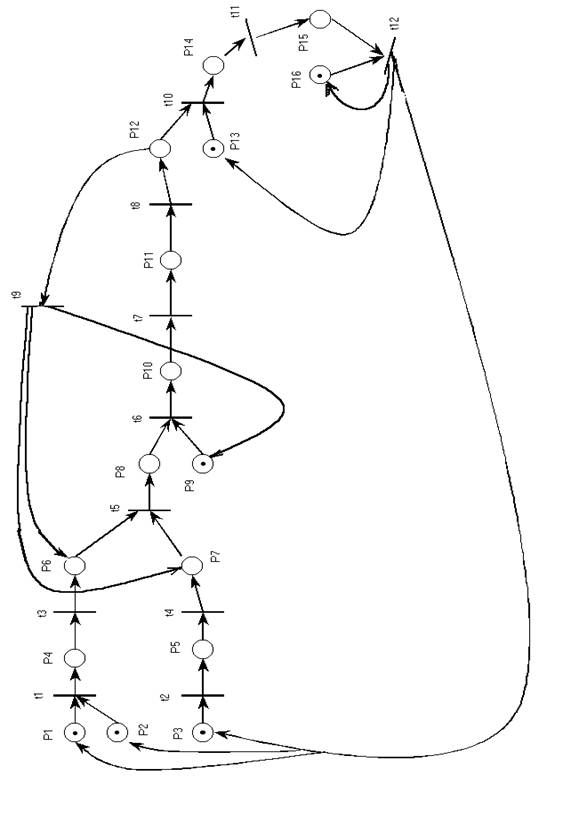
Рис.2 Сеть Петри.
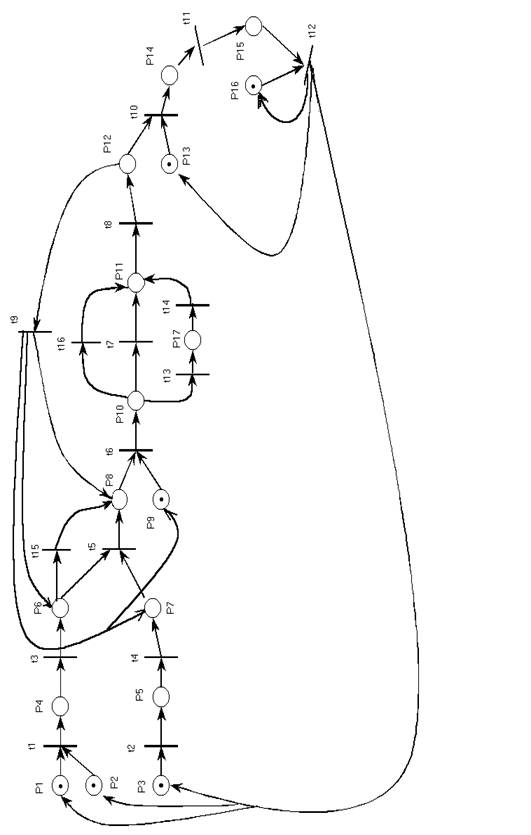
Рис. 3 Сеть Петри с конфликтными ситуациями.
t13 – манипулятор выставил радиоэлемент по координате X.
t14 – ПП выставлена по координате Y.
t15 – манипулятор взял 3 радиоэлемента.
t16 – манипулятор выставил радиоэлемент по координатам XY.
Р16 – ПП позиционирует по координате Y.
3.ГРАФ ДОСТИЖИМОСТИ
1110 0000 1000 1001 0


t1 t2
0011 0000 1000 1001 0 1100 1000 1000 1001 0
t3 t4
0010 0100 1000 1001 0 1100 0010 1000 1001 0
t15

t15 t5
t5
0010 0001 1000 1001 0 0000 0000 1100 1001 0
МАТРИЦА ВХОДНЫХ ИНЦИДЕНЦИЙ (F)
| t1 | t2 | t3 | t4 | t5 | t6 | t7 | t8 | t9 | t10 | T11 | t12 | t13 | t14 | t15 | t16 | |
| Р1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Р2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Р3 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Р4 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Р5 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Р6 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 |
| Р7 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 |
| Р8 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Р9 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Р10 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 |
| Р11 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Р12 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | |
| Р13 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| Р14 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 |
| Р15 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 |
| Р16 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 |
| Р17 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 |
МАТРИЦА ВЫХОДНЫХ ИНЦИДЕНЦИЙ (Н)
| Р1 | Р2 | Р3 | Р4 | Р5 | Р6 | Р7 | Р8 | Р9 | Р10 | Р11 | Р12 | Р13 | Р14 | Р15 | Р16 | Р17 | |
| t1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| t2 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| t3 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| t4 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| t5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| t6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| t7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| t8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 |
| t9 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| t10 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 |
| t11 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 |
| t12 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 |
| t13 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 |
| t14 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| t15 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| t16 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
4. Программа функционирования модели (Visual Basic 6.0)
Private Sub EXIT_Click()
End
End Sub
Private Sub ishodnoe_2_Click()
shiber.Left = 0
shiber.Visible = True
Timershiber_2.Enabled = False
Timershiber.Enabled = False
TimerSHIBER_3.Enabled = False
Timershiber_obr.Enabled = False
Timershiber_2_OBR.Enabled = False
TimerSHIBER_3_OBR.Enabled = False
TimerSHIBER_4.Enabled = False
TimerSHIBER_4_OBR.Enabled = False
pp.Left = 1320
pp.Visible = True
TimerPP_2.Enabled = False
TimerPP_3.Enabled = False
Timerpp.Enabled = False
TimerPP_obr.Enabled = False
TimerPP_4.Enabled = False
PPZ.Left = 2600
PPZ.Visible = False
TimerPPZ_2.Enabled = False
TimerPPZ_3.Enabled = False
TimerPPZ.Enabled = False
TimerPPz_OBR.Enabled = False
TimerPPZ_4.Enabled = False
R.Top = 2160
R.Left = 3840
TimerPOZR.Enabled = False
MR.Top = 1680
MR.Left = 3840
R.Visible = True
ZR.Left = 3480
ZR.Visible = False
TimerZR_2.Enabled = False
TimerZR.Enabled = False
TimerZR_OBR.Enabled = False
TimerZR_4.Enabled = False
imc.Left = 4800
imc.Top = 2040
TimerPOZIMC.Enabled = False
MIMC.Left = 4800
MIMC.Top = 1560
imc.Visible = True
ZRIMC.Left = 4500
ZRIMC.Visible = False
TimerZRIMC_2.Enabled = False
TimerZRIMC.Enabled = False
TimerZrimc_obr.Enabled = False
TimerZRIMC_4.Enabled = False
imc2.Left = 6360
imc2.Top = 2160
TimerPOZIMC2.Enabled = False
imc2.Visible = True
MIMC2.Left = 6360
MIMC2.Top = 1800
pimc2.Left = 5520
pimc2.Visible = False
Timerpimc2.Enabled = False
Timerpimc2_obr.Enabled = False
TimerPIMC2_4.Enabled = False
VYGR.Left = 7755
VYGR.Visible = False
TimerVYGR.Enabled = False
Timervygr_obr.Enabled = False
gotov.Visible = False
POZPP.Visible = False
POZPP_MAN.Visible = False
ZY_3.Visible = False
MAN.Visible = False
Line46.Visible = True
Line47.Visible = True
NR.Left = 3720
NR.Top = 1320
NIMC.Left = 4800
NIMC.Top = 1080
NIMC2.Left = 6240
NIMC2.Top = 1320
End Sub
Private Sub ISHODNOE_3_Click()
shiber.Left = 0
shiber.Visible = True
Timershiber.Enabled = False
Timershiber_obr.Enabled = False
Timershiber_2.Enabled = False
TimerSHIBER_3.Enabled = False
Timershiber_2_OBR.Enabled = False
TimerSHIBER_3_OBR.Enabled = False
TimerSHIBER_4.Enabled = False
TimerSHIBER_4_OBR.Enabled = False
pp.Left = 1320
pp.Visible = True
Timerpp.Enabled = False
TimerPP_obr.Enabled = False
TimerPP_2.Enabled = False
TimerPP_3.Enabled = False
TimerPP_4.Enabled = False
PPZ.Left = 2640
PPZ.Top = 3000
PPZ.Visible = False
TimerPPZ.Enabled = False
TimerPPz_OBR.Enabled = False
TimerPPZ_2.Enabled = False
TimerPPZ_3.Enabled = False
TimerPPZ_4.Enabled = False
R.Top = 1440
R.Left = 6000
TimerPOZR.Enabled = False
R.Visible = True
MR.Left = 6000
MR.Top = 1080
ZR.Left = 3480
ZR.Top = 2520
ZR.Visible = False
TimerZR.Enabled = False
TimerZR_OBR.Enabled = False
TimerZR_2.Enabled = False
TimerZR_4.Enabled = False
imc.Top = 2160
imc.Left = 5760
TimerPOZIMC.Enabled = False
imc.Visible = True
MIMC.Left = 5760
MIMC.Top = 1680
ZRIMC.Left = 4500
ZRIMC.Top = 2700
ZRIMC.Visible = False
TimerZRIMC.Enabled = False
TimerZrimc_obr.Enabled = False
TimerZRIMC_2.Enabled = False
TimerZRIMC_4.Enabled = False
imc2.Top = 2160
imc2.Left = 6520
TimerPOZIMC2.Enabled = False
imc2.Visible = True
MIMC2.Left = 6520
MIMC2.Top = 1800
pimc2.Left = 5520
pimc2.Top = 3000
pimc2.Visible = False
Timerpimc2.Enabled = False
Timerpimc2_obr.Enabled = False
TimerPIMC2_4.Enabled = False
VYGR.Left = 7755
VYGR.Visible = False
TimerVYGR.Enabled = False
Timervygr_obr.Enabled = False
gotov.Visible = False
POZPP.Visible = False
POZPP_MAN.Visible = False
ZY_3.Visible = False
MAN.Visible = False
Line46.Visible = False
Line47.Visible = False
NR.Left = 6000
NR.Top = 800
NIMC.Left = 5600
NIMC.Top = 1300
NIMC2.Left = 6540
NIMC2.Top = 1320
End Sub
печатный плата трасса циклограмма
Private Sub ishodnoe_4_Click()
shiber.Left = 0
shiber.Visible = True
Timershiber.Enabled = False
Timershiber_obr.Enabled = False
Timershiber_2.Enabled = False
Timershiber_2_OBR.Enabled = False
TimerSHIBER_3.Enabled = False
TimerSHIBER_3_OBR.Enabled = False
TimerSHIBER_4.Enabled = False
TimerSHIBER_4_OBR.Enabled = False
pp.Left = 1320
pp.Visible = True
Timerpp.Enabled = False
TimerPP_obr.Enabled = False
TimerPP_2.Enabled = False
TimerPP_3.Enabled = False
TimerPP_4.Enabled = False
PPZ.Left = 2640
PPZ.Top = 3000
PPZ.Visible = False
TimerPPZ.Enabled = False
TimerPPz_OBR.Enabled = False
TimerPPZ_2.Enabled = False
TimerPPZ_3.Enabled = False
TimerPPZ_3.Enabled = False
R.Top = 2160
R.Left = 3840
TimerPOZR.Enabled = False
R.Visible = True
MR.Left = 3840
MR.Top = 1680
ZR.Left = 3480
ZR.Top = 2520
ZR.Visible = False
TimerZR.Enabled = False
TimerZR_OBR.Enabled = False
TimerZR_2.Enabled = False
TimerZR_4.Enabled = False
imc.Top = 2040
imc.Left = 4800
TimerPOZIMC.Enabled = False
imc.Visible = True
MIMC.Left = 4800
MIMC.Top = 1560
ZRIMC.Left = 4500
ZRIMC.Top = 2700
ZRIMC.Visible = False
TimerZRIMC.Enabled = False
TimerZrimc_obr.Enabled = False
TimerZRIMC_2.Enabled = False
TimerZRIMC_4.Enabled = False
imc2.Top = 2160
imc2.Left = 5880
TimerPOZIMC2.Enabled = False
imc2.Visible = True
MIMC2.Left = 5880
MIMC2.Top = 1800
pimc2.Left = 5520
pimc2.Top = 3000
pimc2.Visible = False
Timerpimc2.Enabled = False
Timerpimc2_obr.Enabled = False
TimerPIMC2_4.Enabled = False
VYGR.Left = 7755
VYGR.Visible = False
TimerVYGR.Enabled = False
Timervygr_obr.Enabled = False
gotov.Visible = False
POZPP.Visible = False
POZPP_MAN.Visible = False
ZY_3.Visible = False
MAN.Visible = False
Line46.Visible = True
Line47.Visible = True
NR.Left = 3720
NR.Top = 1320
NIMC.Left = 4800
NIMC.Top = 1080
NIMC2.Left = 5800
NIMC2.Top = 1320
End Sub
Private Sub start_2_Click()
Timershiber_2.Enabled = True
TimerPP_2.Enabled = True
POZPP_MAN.Visible = True
End Sub
Private Sub START_4_Click()
TimerSHIBER_4.Enabled = True
TimerPP_4.Enabled = True
MAN.Visible = True
End Sub
Private Sub START3_Click()
TimerSHIBER_3.Enabled = True
TimerPP_3.Enabled = True
ZY_3.Visible = True
End Sub
Private Sub ishodnoe_1_Click()
shiber.Left = 0
shiber.Visible = True
Timershiber.Enabled = False
Timershiber_obr.Enabled = False
Timershiber_2.Enabled = False
Timershiber_2_OBR.Enabled = False
TimerSHIBER_3.Enabled = False
TimerSHIBER_3_OBR.Enabled = False
TimerSHIBER_4.Enabled = False
TimerSHIBER_4_OBR.Enabled = False
pp.Left = 1320
pp.Visible = True
Timerpp.Enabled = False
TimerPP_obr.Enabled = False
TimerPP_2.Enabled = False
TimerPP_3.Enabled = False
TimerPP_4.Enabled = False
PPZ.Left = 2640
PPZ.Top = 3000
PPZ.Visible = False
TimerPPZ.Enabled = False
TimerPPz_OBR.Enabled = False
TimerPPZ_2.Enabled = False
TimerPPZ_3.Enabled = False
TimerPPZ_3.Enabled = False
R.Top = 2160
R.Left = 3840
TimerPOZR.Enabled = False
R.Visible = True
MR.Left = 3840
MR.Top = 1680
ZR.Left = 3480
ZR.Top = 2520
ZR.Visible = False
TimerZR.Enabled = False
TimerZR_OBR.Enabled = False
TimerZR_2.Enabled = False
TimerZR_4.Enabled = False
imc.Top = 2040
imc.Left = 4800
TimerPOZIMC.Enabled = False
imc.Visible = True
MIMC.Left = 4800
MIMC.Top = 1560
ZRIMC.Left = 4500
ZRIMC.Top = 2700
ZRIMC.Visible = False
TimerZRIMC.Enabled = False
TimerZrimc_obr.Enabled = False
TimerZRIMC_2.Enabled = False
TimerZRIMC_4.Enabled = False
imc2.Top = 2160
imc2.Left = 6360
TimerPOZIMC2.Enabled = False
imc2.Visible = True
MIMC2.Left = 6360
MIMC2.Top = 1800
pimc2.Left = 5520
pimc2.Top = 3000
pimc2.Visible = False
Timerpimc2.Enabled = False
Timerpimc2_obr.Enabled = False
TimerPIMC2_4.Enabled = False
VYGR.Left = 7755
VYGR.Visible = False
TimerVYGR.Enabled = False
Timervygr_obr.Enabled = False
gotov.Visible = False
POZPP.Visible = False
POZPP_MAN.Visible = False
ZY_3.Visible = False
MAN.Visible = False
Line46.Visible = True
Line47.Visible = True
NR.Left = 3720
NR.Top = 1320
NIMC.Left = 4800
NIMC.Top = 1080
NIMC2.Left = 6240
NIMC2.Top = 1320
End Sub
Private Sub start_1_Click()
Timershiber.Enabled = True
Timerpp.Enabled = True
POZPP.Visible = True
End Sub
Private Sub TimerPIMC2_4_Timer()
pimc2.Top = pimc2.Top + 100
pimc2.Left = pimc2.Left + 100
pimc2.Visible = True
If pimc2.Top >= 4000 Then
pimc2.Top = 4000
If pimc2.Left >= 8000 Then
TimerPIMC2_4.Enabled = False
TimerVYGR.Enabled = True
imc2.Visible = True
imc2.Left = 5880
imc2.Top = 2160
pimc2.Visible = False
pimc2.Left = 5520
pimc2.Top = 3000
End If
End If
End Sub
Private Sub Timerpimc2_obr_Timer()
pimc2.Visible = False
TimerVYGR.Enabled = True
pimc2.Left = pimc2.Left - 350
imc2.Visible = True
If pimc2.Left <= 5520 Then
pimc2.Left = 5520
pimc2.Top = pimc2.Top - 350
If pimc2.Top < 3000 Then
Timerpimc2_obr = False
End If
End If
End Sub
Private Sub Timerpimc2_Timer()
pimc2.Top = pimc2.Top + 100
pimc2.Left = pimc2.Left + 100
pimc2.Visible = True
imc2.Visible = False
If pimc2.Top >= 4000 Then
pimc2.Top = 4000
If pimc2.Left >= 8000 Then
Timerpimc2.Enabled = False
Timerpimc2_obr.Enabled = True
End If
End If
End Sub
Private Sub TimerPOZIMC_Timer()
imc.Left = imc.Left + 50
R.Visible = True
R.Left = 3840
TimerSHIBER_4.Enabled = True
TimerPP_4.Enabled = True
If imc.Left >= 5250 Then
TimerPOZIMC.Enabled = False
ZR.Visible = False
ZR.Left = 3000
ZRIMC.Left = 5000
ZRIMC.Top = 3000
imc.Visible = False
TimerZRIMC_4.Enabled = True
End If
End Sub
Private Sub TimerPOZIMC2_Timer()
imc2.Left = imc2.Left + 50
imc.Visible = True
imc.Left = 4800
If imc2.Left >= 6360 Then
TimerPOZIMC2.Enabled = False
imc2.Visible = False
TimerPIMC2_4.Enabled = True
ZRIMC.Left = 5000
ZRIMC.Visible = False
End If
End Sub
Private Sub TimerPOZR_Timer()
R.Left = R.Left - 30
If R.Left <= 3500 Then
TimerPOZR.Enabled = False
R.Visible = False
ZR.Left = 3000
ZR.Top = 3000
PPZ.Visible = False
PPZ.Left = 2600
TimerZR_4.Enabled = True
End If
End Sub
Private Sub TimerPP_2_Timer()
pp.Left = pp.Left + 50
If pp.Left >= 2600 Then
TimerPP_2.Enabled = False
PPZ.Visible = True
TimerPPZ_2.Enabled = True
End If
End Sub
Private Sub TimerPP_3_Timer()
pp.Left = pp.Left + 50
If pp.Left >= 2600 Then
TimerPP_3.Enabled = False
PPZ.Visible = True
TimerPPZ_3.Enabled = True
R.Visible = True
imc.Visible = True
imc2.Visible = True
End If
End Sub
Private Sub TimerPP_4_Timer()
pp.Left = pp.Left + 50
If pp.Left >= 2600 Then
TimerPP_4.Enabled = False
PPZ.Visible = True
TimerPPZ_4.Enabled = True
End If
End Sub
Private Sub TimerPP_obr_Timer()
pp.Left = pp.Left - 50
If pp.Left <= 1320 Then
TimerPP_obr.Enabled = False
pp.Visible = True
End If
End Sub
Private Sub Timerpp_Timer()
pp.Left = pp.Left + 50
If pp.Left >= 2600 Then
Timerpp.Enabled = False
TimerPP_obr.Enabled = True
pp.Visible = False
PPZ.Visible = True
TimerPPZ.Enabled = True
End If
End Sub
Private Sub TimerPPZ_2_Timer()
PPZ.Left = PPZ.Left + 30
If PPZ.Left > 3480 Then
ZR.Visible = True
R.Visible = False
TimerZR_2.Enabled = True
TimerPPZ_2.Enabled = False
PPZ.Left = 2600
PPZ.Visible = False
ZR.Left = 3480
ZR.Top = 3000
End If
End Sub
Private Sub TimerPPZ_3_Timer()
PPZ.Left = PPZ.Left + 100
If PPZ.Left >= 5520 Then
TimerPPZ_3.Enabled = False
PPZ.Visible = False
PPZ.Left = 2600
TimerSHIBER_3.Enabled = True
TimerPP_3.Enabled = True
R.Visible = False
imc.Visible = False
imc2.Visible = False
Timerpimc2.Enabled = True
End If
End Sub
Private Sub TimerPPZ_4_Timer()
PPZ.Left = PPZ.Left + 50
If PPZ.Left >= 3000 Then
TimerPPZ_4.Enabled = False
TimerPOZR.Enabled = True
End If
End Sub
Private Sub TimerPPz_OBR_Timer()
PPZ.Left = PPZ.Left - 30
PPZ.Top = PPZ.Top + 30
PPZ.Visible = False
If PPZ.Top > 3000 Then
PPZ.Top = 3000
If PPZ.Left < 2640 Then
TimerPPz_OBR.Enabled = False
Timershiber.Enabled = True
Timerpp.Enabled = True
End If
End If
End Sub
Private Sub TimerPPZ_Timer()
PPZ.Left = PPZ.Left + 30
If PPZ.Left > 3000 Then
PPZ.Top = PPZ.Top - 30
If PPZ.Left > 3530 Then
TimerPPZ.Enabled = False
R.Visible = False
TimerZR.Enabled = True
End If
End If
End Sub
Private Sub Timershiber_2_OBR_Timer()
shiber.Left = shiber.Left - 50
pp.Visible = False
If shiber.Left <= 0 Then
Timershiber_2_OBR.Enabled = False
pp.Visible = True
pp.Left = 1320
End If
End Sub
Private Sub TimerSHIBER_3_OBR_Timer()
shiber.Left = shiber.Left - 50
pp.Visible = False
If shiber.Left <= 0 Then
TimerSHIBER_3_OBR.Enabled = False
pp.Visible = True
pp.Left = 1320
End If
End Sub
Private Sub TimerSHIBER_3_Timer()
shiber.Left = shiber.Left + 50
If shiber.Left >= 1300 Then
TimerSHIBER_3.Enabled = False
TimerSHIBER_3_OBR.Enabled = True
End If
End Sub
Private Sub TimerSHIBER_4_OBR_Timer()
shiber.Left = shiber.Left - 50
pp.Visible = False
If shiber.Left <= 0 Then
TimerSHIBER_4_OBR.Enabled = False
pp.Visible = True
pp.Left = 1320
End If
End Sub
Private Sub TimerSHIBER_4_Timer()
shiber.Left = shiber.Left + 50
If shiber.Left >= 1300 Then
TimerSHIBER_4.Enabled = False
TimerSHIBER_4_OBR.Enabled = True
End If
End Sub
Private Sub Timershiber_obr_Timer()
shiber.Left = shiber.Left - 50
If shiber.Left <= 0 Then
Timershiber_obr.Enabled = False
End If
End Sub
Private Sub Timershiber_Timer()
shiber.Left = shiber.Left + 50
If shiber.Left >= 1300 Then
Timershiber.Enabled = False
Timershiber_obr.Enabled = True
End If
End Sub
Private Sub Timershiber_2_Timer()
shiber.Left = shiber.Left + 50
If shiber.Left >= 1300 Then
Timershiber_2.Enabled = False
Timershiber_2_OBR.Enabled = True
End If
End Sub
Private Sub Timervygr_obr_Timer()
VYGR.Visible = False
gotov.Visible = True
VYGR.Left = VYGR.Left - 550
If VYGR.Left <= 8000 Then
Timervygr_obr.Enabled = False
End If
End Sub
Private Sub TimerVYGR_Timer()
VYGR.Visible = True
VYGR.Left = VYGR.Left + 250
If VYGR.Left >= 10000 Then
TimerVYGR.Enabled = False
Timervygr_obr.Enabled = True
End If
End Sub
Private Sub TimerZR_2_Timer()
ZR.Left = ZR.Left + 30
ZR.Visible = True
If ZR.Left >= 4500 Then
TimerZR_2.Enabled = False
R.Visible = True
Timershiber_2.Enabled = True
TimerPP_2.Enabled = True
ZR.Visible = False
TimerZRIMC_2.Enabled = True
imc.Visible = False
ZRIMC.Left = 4500
ZRIMC.Top = 3000
End If
End Sub
Private Sub TimerZR_4_Timer()
ZR.Left = ZR.Left + 30
ZR.Visible = True
If ZR.Left >= 5000 Then
TimerZR_4.Enabled = False
TimerPOZIMC.Enabled = True
End If
End Sub
Private Sub TimerZR_OBR_Timer()
ZR.Left = ZR.Left - 50
ZR.Top = ZR.Top - 20
ZR.Visible = False
R.Visible = True
If ZR.Left <= 3500 Then
ZR.Left = 3500
If ZR.Top <= 2300 Then
TimerZR_OBR.Enabled = False
End If
End If
End Sub
Private Sub TimerZR_Timer()
ZR.Top = ZR.Top + 50
ZR.Visible = True
ZR.Left = ZR.Left + 30
TimerPPz_OBR.Enabled = True
If ZR.Top >= 2700 Then
ZR.Top = 2700
If ZR.Left >= 4500 Then
TimerZR.Enabled = False
imc.Visible = False
TimerZRIMC.Enabled = True
TimerZR_OBR.Enabled = True
End If
End If
End Sub
Private Sub TimerZRIMC_2_Timer()
ZRIMC.Visible = True
ZRIMC.Left = ZRIMC.Left + 30
If ZRIMC.Left >= 5520 Then
TimerZRIMC_2.Enabled = False
ZRIMC.Visible = False
ZRIMC.Left = 4500
imc.Visible = True
Timerpimc2.Enabled = True
End If
End Sub
Private Sub TimerZRIMC_4_Timer()
ZRIMC.Visible = True
ZRIMC.Left = ZRIMC.Left + 30
If ZRIMC.Left >= 5520 Then
TimerZRIMC_4.Enabled = False
TimerPOZIMC2.Enabled = True
End If
End Sub
Private Sub TimerZrimc_obr_Timer()
ZRIMC.Left = ZRIMC.Left - 150
ZRIMC.Visible = False
imc.Visible = True
If ZRIMC.Left <= 4500 Then
ZRIMC.Left = 4500
ZRIMC.Top = ZRIMC.Top - 150
If ZRIMC.Top <= 2700 Then
TimerZrimc_obr.Enabled = False
End If
End If
End Sub
Private Sub TimerZRIMC_Timer()
ZRIMC.Top = ZRIMC.Top + 50
ZRIMC.Visible = True
If ZRIMC.Top >= 3000 Then
ZRIMC.Top = 3000
ZRIMC.Left = ZRIMC.Left + 50
If ZRIMC.Left >= 5500 Then
TimerZRIMC.Enabled = False
TimerZrimc_obr.Enabled = True
Timerpimc2.Enabled = True
End If
End If
End Sub