Лабораторная работа: Представлення і перетворення фігур
ПРЕДСТАВЛЕННЯ І ПЕРЕТВОРЕННЯ ТОЧОК
Представлення точок здійснюється наступним чином:
На площині ![]()
У просторі ![]()
Перетворення точок.
Розглянемо результати матричного
множення ![]() , що
визначає точку Р, і матриці перетворення 2х2 загального виду:
, що
визначає точку Р, і матриці перетворення 2х2 загального виду:
 (3.1)
(3.1)
Дослідимо декілька часткових випадків.
1) а=d=1 і c=b=0. Змін не відбувається
 . (3.2)
. (3.2)
2) d=1, b=c=0. Зміна масштабу по осі x
 . (3.3)
. (3.3)
3) b=c=0. Зміна масштабу по осях x і y
 . (3.4)
. (3.4)
4) b=c=0, d=1, a=-1. Відображення координат відносно осі y
 . (3.5)
. (3.5)
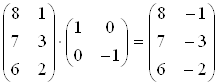
5) b=c=0, a=d<0. Відображення відносно початку координат
 . (3.6)
. (3.6)
6) а=d=1,c=0. Зсув
 . (3.7)
. (3.7)
Для початку координат маємо інваріантно
 .
.
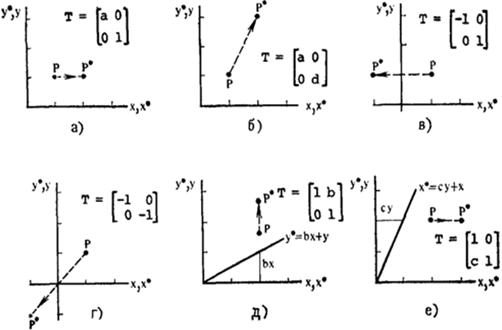
Рис.3.1. Перетворення точок.
ПЕРЕТВОРЕННЯ ПРЯМИХ ЛІНІЙ
Пряма задана 2 векторами.
Вектори положення точок А і В
рівні ![]() і
і ![]() .
.
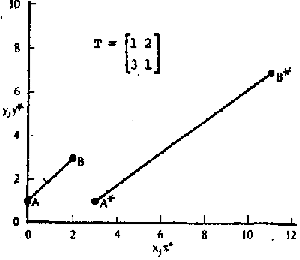
Рис.3.2. Перетворення прямих ліній.
Матриця перетворення
 .
.
Одержимо:
 , (3.8)
, (3.8)
 . (3.9)
. (3.9)
Альтернативне представлення лінії AB
 .
.
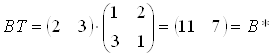
Після цього множення матриці L на Т дасть
 . (3.10)
. (3.10)
Операція зсуву збільшила довжину лінії і змінила її положення.
ОБЕРТАННЯ
Розглянемо плоский трикутник ABC.
Здійснимо поворот на 90° проти годинникової стрілки.
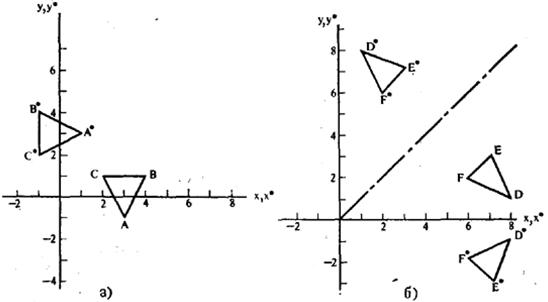
Рис.3.3. Обертання і відображення.
Одержимо
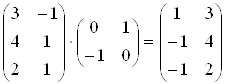 . (3.11)
. (3.11)
В результаті отримаємо трикутник A*B*C*. Поворот на 180° задається матрицею
 ,
,
поворот на 270° навколо початку координат - за допомогою матриці:
 .
.
ВІДОБРАЖЕННЯ
Відображення визначається поворотом на 180° навколо осі, що лежить у площині ху.
1) Обертання навколо прямої y=x задається матрицею:
 .
.
Нові вирази визначаються співвідношенням:
 . (3.12)
. (3.12)
2) Обертання навколо осі y=0 задається матрицею:
 .
.
Нові вершини визначаються співвідношенням:
 . (3.13)
. (3.13)
ЗМІНА МАСШТАБУ
Зміна масштабу визначається значенням 2-х елементів головної діагоналі матриці.
Якщо
використовуємо матрицю  маємо
збільшення в 2 рази.
маємо
збільшення в 2 рази.
Якщо значення елементів не рівні, то має місце спотворення.
Трикутник ABC
перетворений за допомогою матриці .
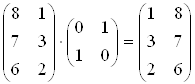
Трикутник DEF перетворений за допомогою матриці  .
Маємо спотворення.
.
Маємо спотворення.
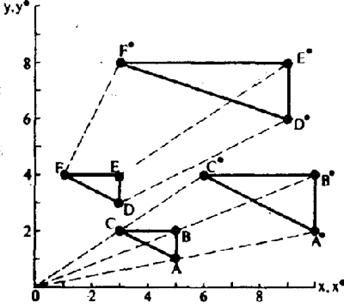
Рис.3.4. Рівномірна і нерівномірна зміна масштабів.
ДВОВИМІРНИЙ ЗСУВ І ОДНОРІДНІ КООРДИНАТИ
Введемо
третій компонент у вектори точок ![]() і
і ![]() -
-![]() і
і ![]() .
.
Матриця перетворення матиме вигляд:
перетворення фігура площина точка
 .
.
Таким чином,
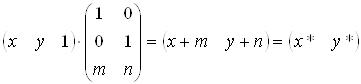 . (3.14)
. (3.14)
Константи m, n викликають зсув x* і y* відносно x і y.
Матриця 3х2 не квадратна - вона не має оберненої матриці.
Доповнимо матрицю перетворення до квадратної
 . (3.15)
. (3.15)
Третій компонент не змінюється.
| Евклідова і неевклідова геометрії | |
|
Зміст Введення Глава I. Розвиток геометрії 1.1 Історія геометрії 1.2 Постулати Евкліда 1.3 Аксіоматика Гильберта 1.4 Інші системи аксіом геометрії ... Наприклад, рівняння прямій, не паралельної осі ординат, має вигляд в = kx + l, або, що те ж саме, ax + by + c = 0, де a = k, b = -1, c = l. Якщо ж пряма паралельна осі ординат, їй ... Ми ж у своїй моделі будемо називати "прямій" будь-яке лінійне рівняння виду ax + by + c = 0, у якому хоча б один з коефіцієнтів a і b відмінний від нуля, причому коефіцієнти ... |
Раздел: Рефераты по математике Тип: дипломная работа |
| Сечение многогранников | |
|
Министерство общего и профессионального образования Российской Федерации Калужский Государственный Педагогический Университет им. К.Э. Циолковского ... Поворот будем осуществлять вокруг одной из осей координат. Normal.x:=((B.y-A.y)*(C.z-B.z))-((B.z-A.z)*(C.y-B.y)) |
Раздел: Рефераты по математике Тип: курсовая работа |
| Кинематический анализ механизма транспортирования ткани | |
|
Кинематический анализ механизма верхней и нижней реек швейной машины 131-42+3 класса. Реферат Отчет с., 1 ч., 46 рис., 3 табл., 88 источников, 1 прил ... - первая передаточная функция координат шарниров A и B по обобщенной координате в проекциях на оси неподвижной системы координат OXY; С помощью указанной программы получены графики: зависимость координат Х и Y нижней рейки от угла поворота главного вала и зависимость координат Х и Y верхней рейки от угла поворота ... |
Раздел: Рефераты по технологии Тип: реферат |
| Вивчення елементів стереометрії у курсі геометрії 9 класу | |
|
ДИПЛОМНА РОБОТА "Вивчення елементів стереометрії у курсі геометрії 9 класу" Вступ Дитина дуже рано починає орієнтуватися в оточуючому її реальному, а ... Для повороту системи навколо осі Oz призначена горизонтальна смуга повороту зображення, а для повороту навколо горизонталі, що проходить через центр повороту, призначена ... У програмі передбачено обчислення обсягів і площ поверхонь тіл обертання, що утворюють яких обертаються навколо осі Оx або Oy в прямокутній декартовій системі координат і задаються ... |
Раздел: Рефераты по педагогике Тип: дипломная работа |
| Построение графика функции различными методами (самостоятельная работа ... | |
|
Беловский Филиал Кемеровского Государственного Университета Построение графика функции различными методами (самостоятельная работа учащихся) Дипломная ... Сначала рассматриваются свойства и график функции y=ax2, затем показывается как при сдвигах параболы y=ax2 вдоль осей координат получаются графики новых квадратичных функций. б) ) При параллельном переносе вдоль оси 0Y точка (x; y) переходит в точку (x; y+b), где b - некоторое число при этом перенос происходит "вверх", если b>0, и "вниз", если b<0; |
Раздел: Рефераты по математике Тип: реферат |