Реферат: Алгоритми розрахунку періодичного режиму в нелінійній схемі
АЛГОРИТМИ РОЗРАХУНКУ ПЕРІОДИЧНОГО РЕЖИМУ В НЕЛІНІЙНІЙ СХЕМІ
1. Коротка характеристика методів розрахунку
Вузли, проектування яких нас цікавить, в більшості випадків використовуються в режимах, де нелінійність виявляється досить сильно. Тому не розглядають методи, які знаходять практичне застосування лише для аналізу слабких нелінійних схем. До їх числа відноситься, наприклад, метод рядів Вольтера.
Методи, які дозволяють розраховувати довільні нелінійні кола, поділяють на дві великі групи – часові та спектральні.
Характерна властивість методів першої групи – це інтегрування нелінійних диференційних рівнянь до отримання усталеного періодичного режиму. Головний недолік їх в тому, що цікавлячись усталеним режимом, ми повинні розрахувати ще і перехідні процеси. Із цим недоліком можна миритись, якщо зусилля і затрати на незаплановані розрахунки невеликі, тобто якщо, наприклад, перехідний режим продовжується недовго. Звісно, що перехідний процес в схемі тим коротший, чим менше її вибірність.
Необхідність визначення періодичного режиму у вибірних пристроях створила ряд прийомів, скоротивши розрахункову процедуру. Пояснимо їх на прикладі. Нехай у нелінійній схемі період усталеного режиму відомий, задана величина і, крім цього, можна говорити, що перехідний процес практично завершується за L періодів. Таким чином, щоб знайти періодичний режим, треба інтегрувати диференційне рівняння схеми протягом L періодів. Перший прийом складається в зменшені часу інтегрування на кожному періоді. Це змушує використовувати такі чисельні методи, які, зберігаючи потрібну точність, дозволяють вести інтегрування з максимальним кроком. Ідея другого прийому – виконувати інтегрування не на кожному періоді, а із пропусками. Для її реалізації формується функція незв’язності, котра характеризує ступінь досягнення усталеного режиму. За допомогою цієї функції, із початковими умовами на якомусь періоді, визначаються початкові умови для інтегрування на наступному періоді.
Очевидно, якщо перехідний процес закінчиться, то початкові умови, використані на попередньому періоді, співпадуть з початковими умовами, обчисленими для наступного. Виявилось, що за початковими умовами для k–го періоду можна приблизно знайти початкові умови для (k+m)-го періоду, де m- ціле число, більше одиниці. В результаті, число періодів, протягом яких треба інтегрувати рівняння, скоротиться в m разів.
У спектральних методах розрахунку визначається періодичне рішення нелінійних диференційних рівнянь, записаних у формі ряду Фур’є. Відносно спектральних компонент цього ряду утворюється система нелінійних (трансцендентних) рівнянь, котра вирішується за допомогою ітерацій. Різновиди методів цієї групи визначається тим, як побудовано ітераційний процес.
Для схемотехнічного проектування розрахунок періодичного режиму потрібен як у випадку, коли період процесу відомий, так і коли період повинен бути знайдений. Перша ситуація характерна для підсилювачів потужності, помножувачів та дільників частоти, тобто для схем, в яких є зовнішня дія. В таких схемах в якості робочого використовують періодичний режим із періодом, рівним періоду зовнішнього сигналу або в ціле число разів більшим за цей період. Подібні схеми звуть неавтономними. Другий клас схем – автономні, наприклад, автогенератори. В них період коливань визначається внутрішніми параметрами і знаходиться разом із амплітудою коливань.
У зв’язку з тим, що розрахунок процесу з відомим періодом простіше, спочатку розглядається цей випадок, а потім вказується, які зміни потрібно ввести в розрахунок в іншій ситуації.
2. Про чисельні методи інтегрування звичайних диференційних рівнянь
Маючи на увазі задачу розрахунку періодичного режиму часовим методом, звернемось до чисельного інтегрування диференційних рівнянь, які описують процеси в електронних схемах. Це цікавить нас з точки зору скорочення часу розрахунків.
Відповідними методами інтегрування можна вважати такі, котрі потребують малих витрат на обчислення при дотриманні заданої точності. Під витратами розумітимемо загальний об’єм розрахунків (число арифметичних операцій), необхідний об’єм пам’яті ЕОМ, машинний час і т.ін. Цілком зрозуміло суперечність потреб високої точності і малих витрат. Дійсно, якщо не вдаватися в подробиці, то здається, що точність чисельного інтегрування тим вище, чим менший крок. З іншого боку, із зменшенням кроку зростає час розрахунку. Справа ускладнюється ще й тим, що в деяких ситуаціях зменшення кроку не вирішує проблему точності. Це зустрічається при інтегруванні “жорстких” диференційних рівнянь, в яких коефіцієнти значно різняться через великий розкид постійних часу кола. В результаті, в перехідному процесі є швидкі та повільні складові, із правильним розрахунком яких впорається далеко не всякий метод інтегрування. Таким чином, в обчислювальній математиці з’явилась необхідність вияву властивостей чисельних методів інтегрування, які впливають на витрати та точність розрахунків. В даний час прийнято характеризувати ці методи точністю і стійкістю.
Точність визначається помилками, які виникають під час розрахунків. Для порівняння методів вводиться поняття “локальна помилка”, яка стосується одного кроку інтегрування. При цьому якщо метод спирається на результати попередніх кроків, припускається, що перші дані точні. Локальна помилка складається з методичної та помилки округлення. Перша залежить від методу, друга від арифметичної точності ЕОМ. В практично використаних методах локальна методична помилка повинна допускати оцінку. Крім того, має місце локальна перехідна помилка, яка зобов’язана своїм існуванням похибкам на попередньому кроці.
Для користувача важлива загальна, глобальна помилка, відповідальна за весь інтервал інтегрування. Зв’язок локальної помилки із загальною складний. Тому при аналізі методу глобальна помилка не розглядається, а уяву про неї одержують за допомогою тестових прикладів.
Друга характеристика методів чисельного інтегрування – їх стійкість. Практичний прояв її виглядає так. Припустимо, інтегруємо тестове диференційне рівняння, для якого відомо точне рішення. Обчислення проводимо кілька разів з постійним кроком, збільшуючи крок від одного розрахунку до іншого. До деякої величини кроку, яку звуть критичною, похибка інтегрування постійно зростає. Але як тільки крок перейде критичне значення, похибка різко зростає (виникає чисельна нестійкість) і отримані результати значно відрізняються від справжніх. Із сказаного випливає, що нестійкий метод не придатний для задач, де виникає потреба інтегрування диференційних рівнянь протягом тривалого часу: щоб уникнути чисельної нестійкості, необхідно змінювати крок, а це збільшує кількість кроків і призводить до зростання загальної похибки через накопичення усіх видів помилок – перехідної, округленої, методичної.
Методи чисельного інтегрування розрізняються в точності, стійкості і ряді інших властивостей. Наведемо прийняту в літературі класифікацію і вкажемо властивості методів, належних до окремих класів.
Методи поділяються на дві великі групи. Відмінна особливість обох груп – спосіб апроксимації заданої функції. В першій групі використовується розклад в ряд Тейлора, в другій – апроксимація функції поліномом з тейлорівським розкладанням. Широке розповсюдження отримали методи другої групи, котрі у вітчизняній літературі звуться кінцево-різницевими.
спектральний інтегрування нелінійний періодичний
Формула довільного кінцево-різницевого методу,
відносно до рішення диференційного рівняння ![]() при початкових умовах
при початкових умовах ![]() , записується
так
, записується
так
![]() , (1)
, (1)
де ![]() ,
,
![]() - крок інтегрування.
- крок інтегрування.
Число p задає кількість попередніх кроків, які
визначають значення ![]() шуканої функції. При р=0 метод
зветься однокроковим. Якщо
шуканої функції. При р=0 метод
зветься однокроковим. Якщо ![]() , то метод явний, при
, то метод явний, при ![]() - неявний. В
останньому випадку шукане значенні
- неявний. В
останньому випадку шукане значенні ![]() входить до правої частини (1) як
аргумент нелінійної функції. Співмножники
входить до правої частини (1) як
аргумент нелінійної функції. Співмножники ![]() ,
, ![]() (їх число дорівнює 2р+3)
шукається методом невизначених коефіцієнтів при поліміальній апроксимації
невідомої функції
(їх число дорівнює 2р+3)
шукається методом невизначених коефіцієнтів при поліміальній апроксимації
невідомої функції ![]() . Число m називають порядком
методу. За допомогою невизначених коефіцієнтів складають m+1 рівняння відносно
. Число m називають порядком
методу. За допомогою невизначених коефіцієнтів складають m+1 рівняння відносно ![]() ,
, ![]() . Коли 2p+3
> m+1, тоді частиною співмножників задаються.
. Коли 2p+3
> m+1, тоді частиною співмножників задаються.
Відомі формули Ейлера – явна
![]()
та неявна
![]()
відносяться до однокрокового методу першого
порядку. Його локальна методи- чна похибка оцінюється величиною ![]() . Якщо зберегти порядок
методу і зробити його багатокроковим, то підбором співмножників в (1) можна
зменшити методичну похибку. Таким чином, точність кінцево –різницевих методів
зростає із збільшенням їх порядку і числа попередніх кроків, які враховуються.
Однак треба мати на увазі, що підвищення порядку супроводжується зменшенням
області стійкості.
. Якщо зберегти порядок
методу і зробити його багатокроковим, то підбором співмножників в (1) можна
зменшити методичну похибку. Таким чином, точність кінцево –різницевих методів
зростає із збільшенням їх порядку і числа попередніх кроків, які враховуються.
Однак треба мати на увазі, що підвищення порядку супроводжується зменшенням
області стійкості.
На перший погляд уявляється, що явні методи
мають перевагу над неявними тому, що в останніх значення ![]() виходить із рішення
нелінійного рівняння, а в явних розраховується за аналітичним виразом. Але як
свідчить аналіз, неявні методи більш стійкі. Отож, вони допускають при заданій
точності більший крок.
виходить із рішення
нелінійного рівняння, а в явних розраховується за аналітичним виразом. Але як
свідчить аналіз, неявні методи більш стійкі. Отож, вони допускають при заданій
точності більший крок.
В даний час в алгоритмах чисельного
інтегрування проблемно-орієнтованих програм використовується кінцево-різницеві
методи, які мають бажану стійкість та дозволяють оцінювати локальну методичну
похибку на кожному кроці. За допомогою цієї оцінки підтримується максимальний
розмір кроку і вибирається мінімальний порядок методу. Для зменшення об’єму
розрахунків в неявних методах ![]() розраховується спочатку за
відповідною явною формулою (прогноз), а потім уточнюється за допомогою неявної
(корекція). Після вибору методу чисельного інтегрування програміст основні
зусилля направляє на створення ефективного алгоритму, який визначає розмір
кроку.
розраховується спочатку за
відповідною явною формулою (прогноз), а потім уточнюється за допомогою неявної
(корекція). Після вибору методу чисельного інтегрування програміст основні
зусилля направляє на створення ефективного алгоритму, який визначає розмір
кроку.
Відносно методів інтегрування, спираючись на
розклад невідомої функції в ряд Тейлора, наприклад методом Рунге-Кутта різних
порядків, можна зазначити, що вони знаходять обмежене використання. Пов’язано
це з двома обставинами: по-перше, ускладнюється оцінка локальної методичної
похибки на кожному кроці інтегрування; по-друге, для визначення ![]() треба m разів обчислити
значення першої частини диференційних рівнянь (m – порядок методу), причому ці
значення неможливо використовувати на інших кроках. Друга властивість знижує
ефективність розрахунків порівняно з кінцево-різницевими формулами. Методом
Рунге-Кутта зручно починати чисельне інтегрування, якщо воно ведеться за багатокроковими
різницевими формулами, для отримання необхідних початкових значень. Справа в
тому, що методи Рунге-Кутта виявляються явними та однокроковими. Тому
використання їх на початковій стадії обчислення не дуже позначиться на
загальних часових втратах, а необхідна точність забезпечується правильним
вибором порядку.
треба m разів обчислити
значення першої частини диференційних рівнянь (m – порядок методу), причому ці
значення неможливо використовувати на інших кроках. Друга властивість знижує
ефективність розрахунків порівняно з кінцево-різницевими формулами. Методом
Рунге-Кутта зручно починати чисельне інтегрування, якщо воно ведеться за багатокроковими
різницевими формулами, для отримання необхідних початкових значень. Справа в
тому, що методи Рунге-Кутта виявляються явними та однокроковими. Тому
використання їх на початковій стадії обчислення не дуже позначиться на
загальних часових втратах, а необхідна точність забезпечується правильним
вибором порядку.
3. Спектральні методи
1 Математичний зміст спектральних методів.
Розглянемо розрахунок періодичного режиму в нелінійному пристрої на прикладі
конкретної схеми (рис. 1), складеної з паралельно з’єднаних провідностей y(p),
нелінійного опору з вольт-амперною характеристикою ![]() та нелінійної ємності, в якій
відома вольт-кулонівська характеристика
та нелінійної ємності, в якій
відома вольт-кулонівська характеристика ![]() . Аргументом лінійної провідності є
оператор диференціювання
. Аргументом лінійної провідності є
оператор диференціювання ![]() .
.
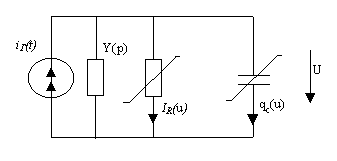
Рисунок 1 – Схема, за допомогою якої ведеться розрахунок періодичного режиму
На вході схеми діє періодичне джерело струму із
періодом ![]()
![]() . ( 2)
. ( 2)
При заданих y(p), ![]() ,
, ![]() ,
, ![]() потрібно знайти періодичну з
періодом
потрібно знайти періодичну з
періодом ![]() напругу
напругу
![]() , яка буде
рішенням диференційного рівняння, записаного в символічній формі
, яка буде
рішенням диференційного рівняння, записаного в символічній формі
![]() .
.
Подамо шукану напругу в формі ряду Фур’є:
![]() . (3)
. (3)
Задача зводиться до визначення спектральних компонентів в (3).
Очевидно, при періодичному режимі струм нелінійного опору та заряд нелінійної ємності будуть також періодичними функціями часу
![]() , (4)
, (4)
![]() . (5)
. (5)
Важливо мати на увазі, що кожна амплітуда струму та заряду в (4) і (5) буде, в силу (3), функцією всіх комплексних амплітуд шуканої напруги.
Щоб отримати рівняння для ![]() , підставимо (3), (4) та (5) в диференційне
рівняння
, підставимо (3), (4) та (5) в диференційне
рівняння
![]() .
.
Тут усі комплексні амплітуди постійні. Значить, оператор диференціювання діє тільки на експоненційні функції
![]() ;
; ![]() .
.
Отже, можна записати
![]() ,
,
де ![]() ={1 при k=0, ±1; 0 при k
={1 при k=0, ±1; 0 при k![]() 0, ±1}.
0, ±1}.
Отримане співвідношення являє собою лінійну
комбінацію функцій ![]() . Оскільки вони лінійно незалежні,
то складена лінійна комбінація може обернутись в нуль тільки при рівності нулю
кожного співмножника в квадратних дужках:
. Оскільки вони лінійно незалежні,
то складена лінійна комбінація може обернутись в нуль тільки при рівності нулю
кожного співмножника в квадратних дужках:
![]() , (6)
, (6)
![]()
Вище зазначалось, що кожна амплітуда струму та заряду є функцією комплексних амплітуд напруги
![]() , (7)
, (7)
![]()
Тому (6) являє собою нескінчену систему трансцендентних (нелінійних) рівнянь відносно комплексних амплітуд напруг.
При практичних розрахунках досить врахувати постійну складову і кілька гармонік напруги. Так можна зробити тому, що розглянуті схеми вибірні. Звичайно, кількість гармонік, які беруться до уваги, повинен визначити розробник. Зазначимо, що в інженерній методиці розрахунку подібних схем, враховується лише одна гармоніка.
Допустимо, встановлено, що досить полічити N гармонік. Тобто, система (6) складається з (2 N + 1) рівнянь. Таким чином, розрахунок періодичного режиму спектральним методом зводиться до рішення системи нелінійних рівнянь. Різновиди методу визначаються способом рішення цієї системи.
Потрібно взяти до уваги особливість рівнянь (6): в них нелінійні функції (7) в деяких випадках можна описати аналітично. У зв’язку з цим, далі не розглядатимемо способи рішення (6), які спираються на аналітичне уявлення функції (7). Тому нижче зупинимося на двох способах: перший – ітераційний метод Ньютона; другий – різновид пропонованого у методу, що спирається на інтегрування диференційних рівнянь.
2 Алгоритм рішення системи нелінійних рівнянь методом Ньютона.
Запишемо рівняння (17) у векторно-матричній формі
![]() , (8)
, (8)
де ![]() - вектор комплексних амплітуд
струму комплексних амплітуд напруги;
- вектор комплексних амплітуд
струму комплексних амплітуд напруги;
![]() - вектор нелінійного опору;
- вектор нелінійного опору;
![]() - вектор комплексних амплітуд
заряду нелінійної ємності;
- вектор комплексних амплітуд
заряду нелінійної ємності;
![]() - вектор складової джерела
струму;
- вектор складової джерела
струму;
![]() та
та ![]() - квадратні діагональні матриці.
Розмірність векторів та матриць дорівнює 2N+1.
- квадратні діагональні матриці.
Розмірність векторів та матриць дорівнює 2N+1.
Ліва частина формули (7), виявляється трансцендентною векторною функцією, аргумент якої – вектор напруги
![]() . (9)
. (9)
За допомогою формули (7) отримаємо співвідношення для методу Ньютона стосовно (9)
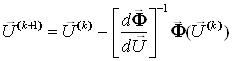 . (10)
. (10)
Верхній індекс вектора напруги вказує на номер ітерації.
Якщо в (9) підставити ![]() , то в лівій частині не отримаємо
нуль. Тому вектор – функцію
, то в лівій частині не отримаємо
нуль. Тому вектор – функцію ![]() називають незв’язною.
називають незв’язною.
Продиференцюємо (10) по вектору ![]()
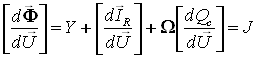 . (11)
. (11)
Нагадаємо, що похідна від вектор-функції
незв’язності за векторним аргументом виявляється матрицею Якобі. Як видно, вона
складається з трьох складових. Позначимо ![]() і
і ![]() елементи матриць
елементи матриць ![]() та
та ![]() .Тоді
.Тоді
 ,
,  ,
, ![]() .
.
В даному випадку використання методу Ньютона
особливо ефективне, оскільки вдається отримати аналітичний вираз для ![]() і
і ![]() . Покажемо, як
знаходиться, наприклад,
. Покажемо, як
знаходиться, наприклад, ![]() .
.
За визначенням
 .
.
Величину ![]() запишемо у вигляді
запишемо у вигляді
 .
.
В свою чергу ,
 .
.
Похідна від струму ![]() за напругою u(t) позначена як
провідність
за напругою u(t) позначена як
провідність ![]() . Приватна похідна від напруги за
комплексною ампліту-
. Приватна похідна від напруги за
комплексною ампліту-
дою ![]() отримана за допомогою (11).Це дозволяє записати
отримана за допомогою (11).Це дозволяє записати
 , (12)
, (12)
де ![]() - (l-m) – а гармоніка
похідної
- (l-m) – а гармоніка
похідної ![]() .
.
 , (13)
, (13)
де ![]() -а гармоніка похідної
-а гармоніка похідної ![]() , яка уявляє
собою диференційну ємність.
, яка уявляє
собою диференційну ємність.
Опишемо алгоритм розрахунку періодичного режиму
в наведеній схемі. Припускаємо, що відомі: період коливань ![]() , кількість врахованих
гармонік N, нелінійні функції
, кількість врахованих
гармонік N, нелінійні функції ![]() та їх похідні, значення лінійних
провідностей схеми на постійному струмі та на частотах гармонік (тобто матриця
Y), число точок М на періоді для виконання дискретного перетворення Фур’є.
та їх похідні, значення лінійних
провідностей схеми на постійному струмі та на частотах гармонік (тобто матриця
Y), число точок М на періоді для виконання дискретного перетворення Фур’є.
Крок 1: ввести початкове значення вектора ![]() .
.
Крок 2: розрахувати за формулою (14) та за
компонентами вектора ![]() миттєві значення напруги
миттєві значення напруги ![]() в М точках
періоду
в М точках
періоду ![]() .
.
Крок 3: розрахувати з вольт-амперної ![]() та
вольт-кулонівської
та
вольт-кулонівської ![]() характеристик миттєві значення
струму крізь нелінійний опір та заряд на нелінійній ємності в М точках періоду
характеристик миттєві значення
струму крізь нелінійний опір та заряд на нелінійній ємності в М точках періоду ![]() , а також розрахувати
компоненти векторів
, а також розрахувати
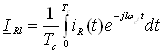
компоненти векторів ![]() за допомогою дискретного
перетворення Фур’є.
за допомогою дискретного
перетворення Фур’є.
Крок 4: визначити вектор незв’язності ![]() за допомогою (11), (12).
за допомогою (11), (12).
Крок 5: перевірити виконання нерівності ![]() ; якщо вона
виконується, то закінчити; якщо ні, то перейти до кроку 6.
; якщо вона
виконується, то закінчити; якщо ні, то перейти до кроку 6.
Крок 6: розрахувати миттєві значення ![]() і
і ![]() в М точках на
періоді та знайти за допомогою дискретного перетворення Фур’є спектральний
склад g(t) і c(t).
в М точках на
періоді та знайти за допомогою дискретного перетворення Фур’є спектральний
склад g(t) і c(t).
Крок 7: сформувати матрицю Якобі, користуючись (10), (11), (12).
Крок 8: вирішити систему лінійних рівнянь (12) відносно компонент
вектора ![]() ;
покласти
;
покласти ![]() і
повернутися до кроку 2.
і
повернутися до кроку 2.
Обміркуємо особливості розрахунку періодичного
режиму автогенератора. Припустимо, в схемі (рис. 1) джерело струму ![]() замінили джерелом живлення
замінили джерелом живлення ![]() , який задає
робочу точку на нелінійних елементах. Припустимо, що в вольт-амперній
характеристиці нелінійного опору є спадаюча ділянка, в середині якої вибрана
робоча точка. За цих умов у схемі можуть збудитись автоколивання, які
описуються рівнянням, складеним для змінних напруги, струму і заряду відносно
робочої точки
, який задає
робочу точку на нелінійних елементах. Припустимо, що в вольт-амперній
характеристиці нелінійного опору є спадаюча ділянка, в середині якої вибрана
робоча точка. За цих умов у схемі можуть збудитись автоколивання, які
описуються рівнянням, складеним для змінних напруги, струму і заряду відносно
робочої точки
![]() .
.
Якщо в це рівняння підставити (11), (12), (13) і зробити, як раніше,
ряд перетворень, то можна отримати рівняння (8), в яких ![]() ,
, ![]() , де
, де ![]() - невідомий період. Таким чином,
кількість невідомих на одиницю більше, ніж кількість рівнянь. Щоб привести у
відповідність кількість невідомих і рівнянь, вважаємо
- невідомий період. Таким чином,
кількість невідомих на одиницю більше, ніж кількість рівнянь. Щоб привести у
відповідність кількість невідомих і рівнянь, вважаємо
![]() .
.
З цього виразу випливає, що перша гармоніка напруги не має квадратурної (синусної) складової. Такий запис справедливий тому, що в автогенераторі фаза коливань випадкова. В результаті кількість спектральних складових напруги зменшилась на одиницю.
Щоб виразніше уявити специфіку розрахунку, підставимо в (8) N=1 і запишемо систему рівнянь автогенератора в дійсній формі
![]() ,
,
![]() , (14)
, (14)
![]() .
.
Тут позначено ![]()
![]() . Оскільки прийнято
. Оскільки прийнято ![]() , то
, то
![]()
![]()
Якщо маємо аналітичну залежністю ![]() і
і ![]() від частоти
від частоти ![]() , то можна
ввести вектор
, то можна
ввести вектор ![]() , записати рівняння (14) у вигляді
, записати рівняння (14) у вигляді
![]() і
вирішити їх методом Ньютона. При цьому для елементів матриці Якобі вдається
утворити аналітичний вираз і алгоритм розрахунків збігається з попереднім.
і
вирішити їх методом Ньютона. При цьому для елементів матриці Якобі вдається
утворити аналітичний вираз і алгоритм розрахунків збігається з попереднім.
Якщо програма не орієнтована на отримання
аналітичного виразу для ![]() і
і ![]() , то можна зробити таким чином.
Подамо перші два рівняння до (14) у векторно-матричної формі
, то можна зробити таким чином.
Подамо перші два рівняння до (14) у векторно-матричної формі
![]() , (15)
, (15)
а останнє перепишемо як
 , (16)
, (16)
де ![]() - діагональна матриця;
- діагональна матриця;
![]() ,
, ![]() .
.
Вирішуватимемо (15) методом Ньютона при ![]() , а (16) послідовним
зближенням або методом Стефенсена при
, а (16) послідовним
зближенням або методом Стефенсена при ![]() . Обчислення повинні бути
організовані так, щоб після вирішення одного рівняння його результати вводились
в друге як початкові значення і навпаки. Розрахунки припиняються, якщо норма
різності векторів
. Обчислення повинні бути
організовані так, щоб після вирішення одного рівняння його результати вводились
в друге як початкові значення і навпаки. Розрахунки припиняються, якщо норма
різності векторів ![]() на сусідніх ітераціях стане
менша, ніж задана похибка.
на сусідніх ітераціях стане
менша, ніж задана похибка.