Курсовая работа: Радиолокация как научно-техническое направление в радиотехнике
Содержание
Введение
1. Измеряемые координаты
3. Радиолокационное обнаружение
4. Импульсная радиолокация
5. Измерение угловых координат цели
6. Измерение дальности в импульсной радиолокации
7. РЛС обнаружения и РЛС слежения
8. Как можно измерять дальность при непрерывном излучении
Заключение
Список литературы
Введение
Радиолокацией называется совокупность методов и технических средств, предназначенных для обнаружения различных объектов в пространстве, измерения их координат и параметров движения посредством приема и анализа электромагнитных волн, излучаемых или переизлучаемых объектами.
Радиолокация как научно-техническое направление в радиотехнике зародилась в 30-х годах. Достижения авиационной техники обусловили необходимость разработки новых средств обнаружения самолетов, обладающих высокими характеристиками (дальностью, точностью). Такими средствами оказались радиолокационные системы.
Выдающийся вклад в развитие радиолокации внесли советские ученые и инженеры П.К. Ощепков, М.М. Лобанов, Ю.К. Коровин, Б.К. Шембель. В Советском Союзе первые успешные эксперименты обнаружения самолетов с помощью радиолокационных устройств были проведены еще в 1934/36 гг. В 1939 г. на вооружении войск ПВО поступили первые серийные отечественные радиолокаторы. Существенным шагом в развитии радиолокации было создание в 1940/41 гг. под руководством Ю.Б. Кобзарева импульсного радиолокатора. В настоящее время радиолокация одна из наиболее прогрессирующих областей радиотехники.
Получение информации в радиолокации сопряжено с наблюдением некоторой области пространства. Технические средства, с помощью которых ведется радиолокационное наблюдение, называются радиолокационными станциями (РЛС) или радиолокаторами; а наблюдаемые объекты — радиолокационными целями. Типичными целями являются самолеты, ракеты, корабли, наземные инженерные сооружения и т. п.
В радиолокации наиболее часто измеряются дальность между целью и РЛС, угловые координаты (азимут, угол места) и радиальная, относительно радиолокатора, составляющая скорости движения. (Азимут - это угол между направлением на цель и северным направлением, измеренный в горизонтальной плоскости. Угол места измеряется между вектором наклонной дальности и его проекцией на горизонтальную плоскость.) В задачу радиолокационного наблюдения в некоторых случаях входит также идентификация (распознавание) целей.
Системы радиолокации практически всегда входит в состав более сложных суперсистем. Эти суперсистемы имеют важное военное и народнохозяйственное значение и находят разнообразное применение: для управления воздушным движением, в навигации самолетов, кораблей, в геофизических и астрофизических исследованиях и др.
Системы радиолокации составляют информационную часть таких суперсистем и функционируют совместно и во взаимной связи с другими подсистемами суперсистемы (радионавигации, радиоуправления, передачи информации).
1. Измеряемые координаты
Радиолокация обеспечивает определение координат объекта по отраженному от него радиосигналу. Координаты определяются относительно места расположения радиолокатора, и основными являются две угловых координаты: азимут и угол места, и наклонная дальность. Их определение поясняется следующим рисунком.
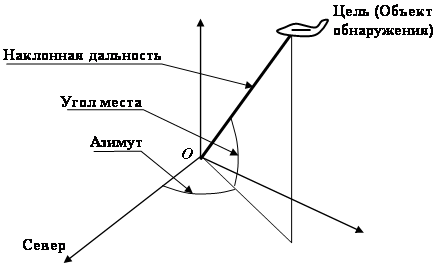
Радиолокатор располагается в точке О. Азимут измеряется в горизонтальной плоскости. Это угол между направлением на север и вертикальной плоскостью, проходящей через радиолокатор и цель. Угол места – это угол между касательной к земной поверхности и направлением на объект в вертикальной плоскости.
Уже в первом договоре на разработку радиолокационной аппаратуры, заключенном Управлением противовоздушной обороны Рабоче-крестьянской Красной Армии (УПВО РККА) и Ленинградским электрофизическим институтом (ЛЭФИ) в феврале 1934 г., были сформулированы следующие тактико-технические требования:
· Обнаружение самолетов и определение координат на высотах полета до 10 км и расстоянии до 50 км;
· Точность определения координат в пределах 2 – 5%;
· Определение количества самолетов (один, два, звено, эскадрилья и больше;
· Определение скорости самолета с точностью до 25 км/ч и курса с точностью 2 – 5%.
Ясно, что эти требования были скорее желаемыми, чем реально достижимыми, так как в то время сама возможность обнаружения самолетов по отраженному от них электромагнитному излучению была сомнительной, и выполнение одного единственного требования – обнаружение самолета на расстоянии 50 км было бы большим достижением.
Договор Главного артиллерийского управления (ГАУ) с ЛЭФИ (январь 1934 г.) предусматривал решение более скромной задачи: обнаружение самолета и его пеленгация с точностью, достаточной для управления зенитным прожектором.
2. История исследования и разработки радиолокационных устройств
Не преуменьшая роли всех исследователей и разработчиков радиолокационных устройств, отдадим должное двум людям, благодаря усилиям которых СССР к началу Великой Отечественной войны обладала радиолокационными станциями обнаружения достаточно высокого качества. Это Павел Кондратьевич Ощепков и Юрий Борисович Кобзарев.
Это были целеустремленные люди, что проявилось еще в годы их учебы. Ощепков за время обучения на первом курсе вуза выполнил программу двух курсов и был сразу переведен на третий. Кобзарев не учился в десятом классе школы, так как все экзамены за среднюю школу сдал после девятого класса. ВУЗ он закончил за четыре года вместо положенных пяти.
Идея обнаружения самолетов с помощью радиоволн для противовоздушной обороны возникла у инженера П.К. Ощепкова, когда он проходил одногодичную военную службу в артиллерийском полку ПВО в 1932 г. Он поделился своими мыслями с командиром полка В.М. Черновым, а тот, в свою очередь, с приехавшим в полк инспектором Управления ПВО И.Ф. Блажевичем. Увидев в инженере Ощепкове инициативного, изобретательного человека, командование УПВО, крайне заинтересованное в решении задачи надежного обнаружения самолетов, отозвало П.К. Ощепкова из артиллерийского полка, и он был назначен инженером в УПВО.
Так с конца 1932 г. П.К. Ощепков стал работать в центральном аппарате Наркомата обороны над вопросами радиообнаружения самолетов для службы ВНОС (воздушное наблюдение, обнаружение, связь) ПВО.
Во второй половине 1933г. П.К. Ощепков в докладе Народному комиссару обороны К.Е. Ворошилову изложил принцип использования в системе ПВО новых средств обнаружения самолетов с применением радиоволн. Работая над этой проблемой, он пришел к выводу о целесообразности применения импульсного, а не непрерывного излучения радиоволн, что и определило его дальнейшие усилия по разработке именно импульсных радиолокаторов.
К.Е. Ворошилов и М.Н. Тухачевский одобрительно отнеслись к инициативе УПВО и рекомендовали привлечь к обсуждению этого вопроса ученых Академии Наук СССР. Ощепков как представитель УПВО встретился с Президентом АН СССР А.П. Карпинским и по его совету с академиками А.Н. Крыловым, С.И. Вавиловым и А.Ф. Иоффе. В результате в Ленинградском физико-техническом институте (ЛФТИ) под председательством А.Ф. Иоффе было созвано совещание ведущих специалистов в области радиотехники, на котором с докладом выступил П.К. Ощепков. (Поразительна смелость этого молодого человека!). Единого мнения у присутствующих не было. В Постановлении было отмечено, что использование радиосредств может привести к созданию нужных приборов, но ввиду новизны проблемы необходима длительная научно-исследовательская работа, и пока следует продолжать работы по звукопеленгации и инфракрасной локации (по тепловому излучению работающих двигателей). Сомнения вызывала возможность обнаружения сигнала, отраженного от самолета, ввиду его малости. Только один человек согласился на проведение работ по радиолокации. Это был директор ЛЭФИ академик А.А. Чернышев, который за пять дней до этого совещания (!!!) заключил договор с Главным Артиллерийским управлением (ГАУ) на разработку станции радиообнаружения. Он знал об экспериментальных исследованиях по радиообнаружению самолетов, выполненных в 1933 г в Центральной радиолаборатории (ЦРЛ) под руководством инженера Ю.К. Коровина.
В ЛЭФИ было выбрано непрерывное излучение для построения аппаратуры радиообнаружения, а П.К. Ощепков оставался сторонником импульсного излучения. Поэтому работа УПВО с ЛЭФИ не была продолжена, и в начале 1935 г был заключен договор УПВО с ЛФТИ. Выполнение его было возложено на лабораторию проф. Д.А. Рожанского.
Д.А. Рожанский был видным специалистом по распространению радиоволн. В 1925 г. он приехал в Харьков, чтобы создать пункт для изучения распространения коротких волн. И надо же было там произойти одной случайной встрече. Ему в качестве помощника порекомендовали студента четвертого курса Харьковского института народного образования Ю. Кобзарева. Увлеченность и самоотдача этого студента так понравились Рожанскому, что он пригласил Кобзарева к себе на работу. Кобзарев досрочно заканчивает институт и двадцати лет от роду в феврале 1926 г. начинает работу в ЛФТИ в должности научного сотрудника в лаборатории Рожанского.
В марте 1935 г. лаборатория приступила к исследованию импульсного метода радиолокации и разработке узлов будущего радиолокатора, в первую очередь, генератора высокочастотных импульсов, усилителя широкополосных сигналов и индикатора, который бы позволял измерять координаты цели. После смерти Рожанского разработкой импульсной РЛС стал руководить Кобзарев. Эта работа дала начало созданию отечественной РЛС дальнего обнаружения РУС-2. За разработку импульсной РЛС Ю.Б. Кобзарев стал лауреатом Сталинской премии.
В первых РУС-2 использовались отдельные приемная и передающая антенны. Станция располагалась на двух автомашинах – соответственно, для приемника и передатчика. Антенны жестко закреплялись на кабинах. Обзор пространства обеспечивался синхронным вращением кабин. Было произведено 12 таких станций. А далее стали выпускаться станции РУС-2с, в которых использовалась одна антенна на прием и передачу. Обзор пространства производился вращением антенны, а кабина была неподвижной.
США и Англия к началу Второй мировой войны уже обладали развитым парком радиолокационных станций: наземных, корабельных, самолетных. Наиболее удачной наземной РЛС обнаружения была станция SCR 268, разработанная в США. В этой РЛС использовались три отдельные антенны для передатчика, приемника азимутального канала и приемника угломестного канала, размещенных на одной станине.
3. Радиолокационное обнаружение
В любую радиолокационную систему входят три обязательных узла: передатчик, приемник и индикаторное устройство.
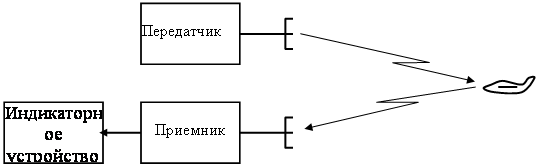
Передатчик формирует высокочастотное колебание, которое через передающую антенну излучается в пространство. Если на пути излученной электромагнитной волны окажется какой-либо объект (цель), то электромагнитная волна будет рассеиваться (отражаться) им по всем направлениям. Малая часть этой рассеянной волны попадет на приемную антенну и преобразуется приемником в электрический сигнал. В этом сигнале содержится информация об отражающем объекте. Задача индикатора – представить эту информацию в удобной форме.
Работа по радиообнаружению целей началась в начале 30-х годов практически одновременно в странах с развитой радиопромышленностью – США, СССР, Германии, Англии, Франции и Японии. Первые системы радиообнаружения использовали непрерывное излучение электромагнитного колебания. Во многом это определялось требованиями технической реализации. Все, что нужно для непрерывной системы радиообнаружения, уже было разработано для систем радиосвязи: передатчики непрерывных колебаний, высокочувствительные сверхрегенеративные приемники, стрелочные и звуковые индикаторы. А импульсные передатчики, так же как и усилители радиоимпульсов, требовалось еще разрабатывать.
Принцип построения системы напрашивался сам собой: использование интерференции прямого сигнала, излученного передатчиком, и сигнала, отраженного от цели.
 |
 |
||||||||||||
|
Радиоприемник располагался на расстоянии в десятки километров от передатчика и принимал его сигнал. Если в зону излучения передатчика попадал самолет, то сигнал, отраженный от него, тоже принимался приемником. Самолет обнаруживался по интерференции прямого и отраженного сигналов. Использование в приемнике направленной антенны позволяло определять направление на цель.
На этом принципе была разработана радиолокационная система “Ревень”. Система состояла из передающей и двух приемных станций, смонтированных на автомашинах. Приемные станции располагались на расстоянии 30 – 40 км по разные стороны от передающей станции. В сентябре 1939 г. система “Ревень” под названием РУС-1 (радиоулавливатель самолетов) была принята на вооружение войск ПВО. Планировалось создать заградительную зону из этих станций – “электромагнитную завесу”, при пересечении которой самолеты обнаруживались бы по биениям прямого и отраженного сигналов. Биения регистрировались на бумажной ленте.
До июня 1941 г. было выпущено 45 комплектов этой системы. Зимой 1939 – 1940 гг., во время войны с белофинами система РУС-1 прошла боевую проверку. Однако система не оправдала возлагавшихся на нее надежд, она не могла заблаговременно оповещать службу ПВО Ленинграда как фронтового города о самолетах противника. В апреле 1940 г. станции РУС-1 с постов наблюдения на Карельском перешейке были переброшены для дальнейшего использования в Закавказье. Производство РУС-1 было прекращено, когда на вооружение была принята импульсная РЛС РУС-2.
В импульсных РЛС излучаются короткие импульсы. Излученные и отраженные от цели импульсы разнесены по времени и интерференция между ними невозможна. Обнаружение сигнала в импульсных РЛС производится по величине напряжения на выходе приемника. Если напряжение превышает уровень шумов приемника, то выносится решение об обнаружении сигнала.
4. Импульсная радиолокация
Почему же отказались от непрерывной радиолокации и отдали предпочтение импульсной? Главной проблемой непрерывной радиолокации оказалось измерение дальности. Непрерывное излучение позволяет установить наличие отражающего объекта в облучаемой зоне, определить направление на объект, но измерить дальность до объекта было трудно.
Казалось бы, можно определить расстояние по интенсивности принятого сигнала – чем дальше объект, тем слабее сигнал, но на самом деле интенсивность сигнала зависит не только от дальности, но и от величины и формы отражающего объекта, его ориентации, и на практике подобный метод измерения дальности не применяется. Можно использовать триангуляционные методы, применяющиеся в геодезии, когда расстояние определяется расчетом по известному расположению двух точек и по направлениям из каждой точки на объект (сравните: пеленгационный метод определения местоположения в радионавигации). Но для реализации такого измерения потребуется два приемника и точное измерение угловых координат, а также время для проведения расчетов.
Правда, уже был запатентован метод измерения дальности при непрерывном излучении есть, предполагающий излучение радиоволн с изменяющейся частотой, то есть частотно модулированных радиоволн. Об этом подробнее мы поговорим далее, а сейчас только отметим, что этот метод легко реализуется, если отражающий объект только один. А для радиолокации типовой является ситуация, когда отражающих объектов много, и для каждого нужно определить его координаты. В этой ситуации вне конкуренции оказался импульсный метод радиолокации, когда импульсы, отраженные от многих целей, разнесены по задержке и легко разделяются.
Еще один недостаток непрерывной радиолокации – необходимость разнесения на большое расстояние передатчика и приемника. Энергия излучаемой передатчиком электромагнитной волны должна быть очень большой, так как только незначительная часть ее возвращается от обнаруживаемого объекта к приемнику. Если мощный передатчик работает по соседству с высокочувствительным приемником, который должен реагировать на ничтожное количество отраженной энергии, то нужно принимать специальные меры защиты приемника от прямого попадания энергии, излучаемой передатчиком. В непрерывной радиолокации защита приемника обеспечивалась разнесением передатчика и приемника на большое расстояние.
В импульсной радиолокации работа передатчика и приемника разнесена по времени: когда излучается радиоимпульс, приемник закрыт; а когда принимается импульс, отраженный от цели, передатчик не работает. Поэтому приемник и передатчик могут находиться в одном месте. И кроме того, можно использовать одну антенну, работающую и на прием, и на передачу. Это значительно упрощает конструкцию РЛС. Для защиты приемника на время работы передатчика были разработаны специальные разрядники-переключатели “прием-передача”, закорачивающие вход приемника на время излучения радиоимпульса.
Но непрерывное излучение имеет и несомненное достоинство – оно позволяет измерять скорость объекта. Как известно, частота отраженного от движущегося объекта колебания fотр будет отличаться от частоты облучающего колебания fo на величину частоты Доплера Fд: fотр =fo + Fд, где Fд = 2Vfo/c. Конечно, доплеровский сдвиг частоты небольшой (например, при длине волны 3м и скорости объекта 360 км/ч доплеровский сдвиг составит всего 33 Гц), но его можно выделить узкополосным фильтром и измерить. Однако на заре радиолокации об измерении скорости еще не думали. В настоящее время разработаны импульсные РЛС малой скважности, которые позволяют измерять дальность до цели по задержке импульсного сигнала и скорость по доплеровскому сдвигу частоты.
5. Измерение угловых координат цели
Итак, перед первыми разработчиками систем радиообнаружения самолетов стояли, главным образом две задачи: обнаружить цель и запеленговать ее, то есть определить направление на цель.
Мы уже познакомились с методами определения направления при изучении истории радионавигации. Таких методов три: по минимуму принимаемого сигнала, по максимуму принимаемого сигнала и по равносигнальной зоне. В радионавигации используются первый и последний методы, как наиболее точные. В радиолокации – второй и третий, так как отраженный от цели сигнал очень слабый, и прием сигнала возможен только, когда антенна направлена на цель. Кроме того, в радиолокации используются антенны с узкими диаграммами направленности, а для таких антенн определение направления по максимуму сигнала становится уже достаточно точным.
Для пеленгации в принципе не важно, каким будет излучение – непрерывным или импульсным – все определяется формой диаграммы направленности антенны. В первых радиолокационных станциях, таких как РУС-2 (СССР) и SCR-268 (США) поиск цели осуществлялся вручную. Оператор РЛС поворачивал антенную систему (естественно, с помощью двигателей), добивался максимума отраженного от цели сигнала и считывал угол с лимба, связанного электромеханической системой с осью антенны.
В последующих разработках радиолокационных станций обнаружения использовалось вращение диаграммы направленности с постоянной угловой скоростью в пределах зоны обзора (360о в РЛС кругового обзора, или в меньших пределах при секторном обзоре).
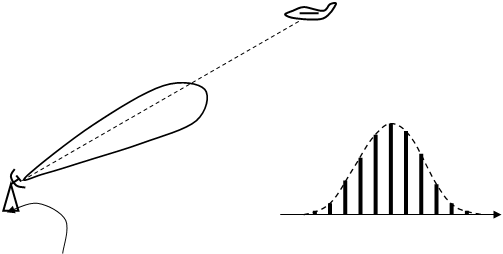
При этом от каждой цели, находящейся в зоне обзора, формируется сигнал примерно колокольной формы, по максимуму которого измеряется направление на цель. Для импульсного излучения форма сигнала на выходе приемника (последовательность импульсов) показана на рисунке выше справа. Такой сигнал называют пачкой импульсов.
В радиолокационных станциях сопровождения, осуществлявших слежение за одной целью, пеленгация производилась по равносигнальной зоне.
6. Измерение дальности в импульсной радиолокации
При использовании импульсного метода передатчик излучает очень короткие высокочастотные импульсы через длительные промежутки между ними. Например, длительность импульса 1 мкс, а длительность интервала между импульсами 999 мкс, то есть период 1мс. Условное изображение (не соблюдено соотношение между длительностью и периодом импульсов) излучаемых а) и принимаемых б) импульсов приведено ниже
а)
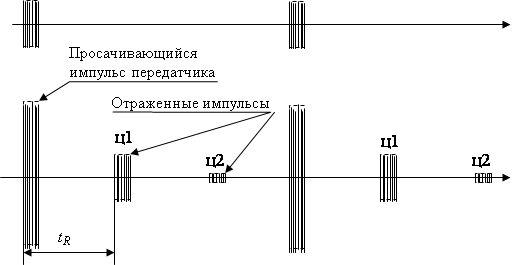
б)
Во время излучения импульса какая-то его часть попадает на вход приемника, несмотря на все меры, принимаемые для предотвращения этого. И пусть это даже очень малая часть, но мощность этого импульса во много раз превышает мощность принимаемых импульсов и обычно на это время приемник запирается. Если в направлении излучения находится цель, то на входе приемника появится отраженный от нее импульс, задержанный относительно излученного на время tR, равное времени распространения радиоимпульса от РЛС до цели и обратно. Если дальность до цели равна R, то радиоволна проходит расстояние 2R и задержка tR = 2R/c.
Если в зону действия луча попадут и другие цели, то от них тоже появятся отраженные импульсы. Чем дальше расположена цель, тем слабее отраженный от нее импульс. Если амплитуда отраженного импульса будет ниже порога чувствительности приемника, то такой сигнал не обнаруживается. Дальность действия РЛС тем больше, чем больше мощность излучаемого импульса и выше чувствительность приемника.
Импульсный метод позволяет легко измерить дальность до цели по задержке отраженного импульса, и не только до одной цели, а для всех, попадающих в зону действия луча. Это значит, что импульсный метод обладает разрешением по дальности. Две цели можно разрешить, то есть воспринять их как две отдельные цели, а не одну протяженную, если отраженные от этих целей импульсы не перекрываются.
Самый простой и очевидный способ измерения дальности – использование осциллографического индикатора типа А.
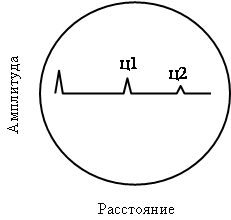
В индикаторе типа А используется линейная развертка по горизонтали, которая начинается в момент излучения импульсов передатчиком и заканчивается перед излучением следующего импульса. По вертикали луч отклоняется сигналом с выхода приемника. Величина отклонения пропорциональна величине сигнала. Вертикальное отклонение, соответствующее импульсу передатчика, возникает в начале линии развертки, а отраженные сигналы, похожие по форме, но меньшей величины, появляются через время, пропорциональное расстоянию до каждого отражающего объекта. Так как развертка линейна, то горизонтальную шкалу можно проградуировать в единицах дальности, например, в километрах.
Как мы уже говорили, несовпадение по времени работы передатчика и приемника позволяет использовать одну и ту же антенну для передачи и приема. Для этого используется переключающее устройство, которое подсоединяет антенну к передатчику, когда надо излучать импульсы, и к приемнику во время интервала между импульсами передатчика. В состав этого устройства входит газовый разрядник, разряд в котором блокирует вход приемника.
Заметим, что длительность излучаемого импульса определяет то время, в течение которого приемник не может вести прием отраженных импульсов, так как он блокирован мощным импульсом передатчика. Поэтому отраженные импульсы от близких целей, возвращающиеся уже в то время, когда еще не закончился импульс передатчика, не могут быть воспроизведены на экране индикатора. Таким образом, длительность импульса определяет минимальную дальность действия станции, называемую также мертвой зоной.
Частота повторения импульсов определяет максимальную однозначно измеряемую дальность действия РЛС. Чтобы пояснить это, возьмем частоту повторения импульсов в 2 раза больше, чем на рассмотренном ранее рисунке. (Внимательно сравните эти рисунки).
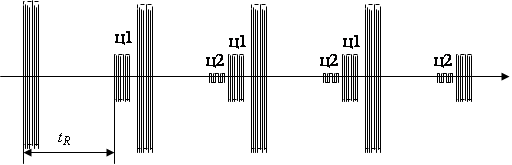
При высокой частоте повторения отраженный импульс от дальней цели ц2 придет не в первый промежуток между импульсами, а в последующий. Осциллограмма на индикаторе изменится.
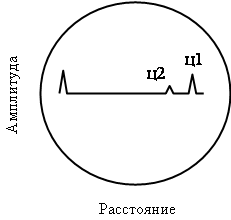
Дальняя цель ц2 воспринимается теперь как ближняя. Измеренная величина запаздывания для нее будет на период следования импульсов меньше истинного. Поэтому для однозначного измерения дальности период повторения импульсов должен быть больше, чем максимально возможная задержка отраженного импульса, видимого на экране
7. РЛС обнаружения и РЛС слежения
Задача РЛС обнаружения – обнаружить все цели, находящиеся в зоне обзора и определить их координаты с невысокой точностью. Задача РЛС слежения – обеспечить измерение координат выбранной цели с высокой точностью.
В типовой РЛС обнаружения обеспечивается круговой поиск по азимуту. Отсчет координат целей (азимут и дальность) производится по индикатору кругового обзора (ИКО). Структурная схема РЛС обнаружения приведена ниже
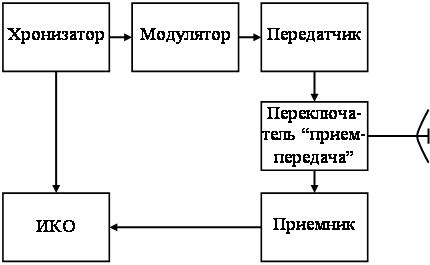
Передатчик генерирует последовательность коротких высокочастотных импульсов. Он управляется импульсами модулятора, длительность и частота повторения которых задаются хронизатором. Хронизатор также формирует импульсы для запуска развертки индикатора кругового обзора, совпадающие по времени с излучаемыми импульсами. Отраженные импульсы усиливаются и детектируются в приемнике и подаются далее на ИКО для управления яркостью луча. В ИКО используется радиальная развертка, вращающаяся синхронно с вращением антенны.
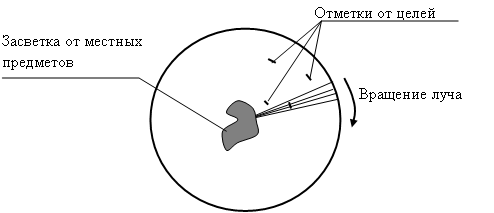
Движение луча начинается с центра экрана и заканчивается у края трубки. Центр экрана соответствует нулевой дальности, т.е. расположению радиолокатора, а край – максимальной просматриваемой дальности. Для индикации цели используется яркостная отметка. Другими словами, если в индикаторе типа А появление отраженного импульса приводит к отклонению луча от прямой линии, то в ИКО во время прихода импульса увеличивается яркость свечения луча.
Так как луч совершает полный оборот за сравнительно большое время, равное периоду вращения антенны (несколько секунд), то используется трубка с длительным послесвечением. При каждом проходе вращающегося луча на одном и том же расстоянии от центра экрана появляются яркостные отметки от цели. Количество отметок равно количеству импульсов в пачке. За счет послесвечения эти отметки сливаются и образуют дужку, по центру которой определяется азимут цели.
РЛС слежения в годы Второй мировой войны назывались станциями орудийной наводки. Они обеспечивали высокоточное измерение координат цели, подлежащей уничтожению, и были связаны через прибор управления зенитным огнем (ПУАЗО) с зенитной батареей. В первых станциях орудийной наводки типа английской GL-Mk-II и американской AN/TPS-3 использовалось ручное сопровождение цели. В последующих (GL-Mk-III, SCR-545, SCR-584/784 и др.) сопровождение цели осуществлялось автоматически с использованием конического сканирования луча,
В этих РЛС пеленгация цели осуществлялась по равносигнальному направлению

Пеленгацию по равносигнальному направлению можно реализовать различными способами. Можно взять две антенны с пересекающимися диаграммами направленности (рис а), подсоединить их к приемникам и сравнивать выходные сигналы приемников U1 и U2, Если U1 > U2, то цель отклонилась влево от равносигнального направления, если U1 < U2, то – вправо, а если U1 = U2, то цель находится точно на равносигнальном направлении.
Можно взять один приемник и подключать его поочередно к антеннам с диаграммами направленности 1 и 2. Тогда выходное напряжение будет неизменным, если цель находится на равносигнальном направлении, или иметь форму меандра, если направление на цель не совпадает с равносигнальным направлением. Причем при изменении стороны отклонения меандр будет переворачиваться (фаза изменяется на 180о).
Так реализуется измеритель отклонения направления на цель от равносигнального направления. Измеренное отклонение можно использовать для разворота антенной системы так, чтобы равносигнальное направление приближалось к направлению на цель. Но так как цель перемещается по азимуту и углу места, т.е. по двум взаимно перпендикулярным направлениям, то нужно иметь еще пару антенн с пересекающимися диаграммами направленности в плоскости, перпендикулярной рассмотренной. В 60-е годы сделают РЛС сопровождения с антенной системой, формирующей четыре пересекающихся диаграммы направленности и назовут ее моноимпульсной.
Но в 40-е годы (во время второй мировой войны) нашли другое решение: использовали круговое вращение диаграммы направленности. Это эквивалентно поочередному подключению к приемнику одну за другой четырех антенн с пересекающимися диаграммами направленности, только вместо ступенчатого перехода диаграммы направленности из одного положения в другое этот переход стал плавным. Конструктивно такое вращение осуществлялось просто. Станции орудийной наводки работали в СВЧ диапазоне, и антенна представляла собой параболоид вращения, в фокальной плоскости которого располагался излучатель – полуволновый вибратор или рупор. Если этот излучатель сместить относительно оси параболоида, то максимум излучения антенны не будет совпадать с осью антенны, что поясняется рисунком ниже.
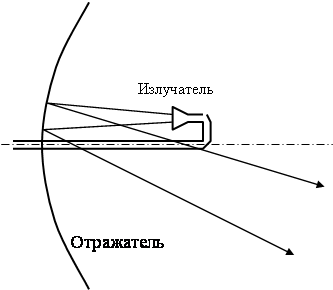
Если теперь вращать излучатель, то будет вращаться диаграмма направленности при неподвижном отражателе. РЛС слежения, в которых производится вращение диаграммы направленности, называются РЛС с коническим сканированием. Сменившие их через четверть века РЛС с одновременным сравнением четырех диаграмм направленности стали называться моноимпульсными РЛС.
Структура системы управления антенной РЛС слежения приведена ниже
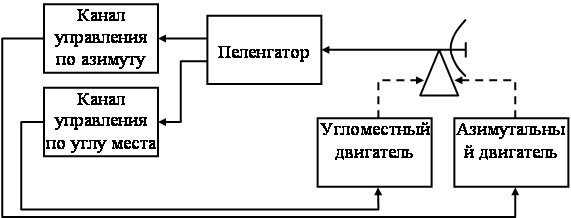
Она содержит два независимых канала управления: по азимуту и по углу места. Если самолет находится на равносигнальном направлении, то напряжение на обоих выходах пеленгатора (по азимуту и углу места) равно нулю, на двигатели никакого напряжения не подается и антенна остается в прежнем положении. Смещение самолета с равносигнального направления приводит к появлению напряжения на выходе пеленгатора и к развороту антенны до тех пор, пока напряжение на выходе пеленгатора не станет равным нулю, т.е. пока равносигнальное направление не совпадет с направлением на цель.
8. Как можно измерять дальность при непрерывном излучении
Как мы отмечали в начале этого занятия, создателям радиолокаторов пришлось отказаться от использования непрерывного излучения, так как было сложно измерить дальность. И эта трудность многократно увеличивалась, когда в зону облучения попадало несколько целей.
Но существуют задачи, когда в зону облучения радиолокационной установки может попасть только один единственный объект. Это задача определения высоты летательного аппарата относительно поверхности земли, а также возникшая в последние полвека задача радиолокационного обеспечения сближения и стыковки космических аппаратов. Для решения этих задач используется обычно непрерывное излучение.
Существует два метода измерения дальности при непрерывном излучении: частотный и фазовый. О фазовом мы немного говорили при изучении истории радионавигации, теперь познакомимся с частотным. Для этого надо излучать такой сигнал, чтобы каждому моменту времени соответствовало свое значение частоты.
Пусть излучается сигнал, частота которого линейно изменяется со временем
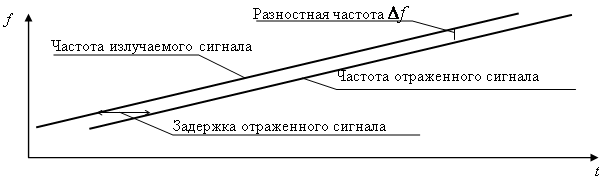
Отраженный от объекта сигнал задержан относительно излученного на время распространения сигнала до объекта и обратно. Поэтому частота принимаемого сигнала будет отличаться от частоты излучаемого в момент приема сигнала на величину Df (см. рисунок), которая пропорциональна задержке отраженного сигнала. Остается измерить разностную частоту и проградуировать шкалу частотомера в единицах измерения расстояния.
На практике нельзя линейно изменять частоту сколь угодно долго, и поэтому используют периодическое изменение частоты (по гармоническому или треугольному законам) с достаточно большим периодом. Впервые такой метод был реализован в альтиметре Ю. Бентли, заявленном в 1928 г. и запатентованном в 1935 г. В самолетных высотомерах малых высот (до 1000 м) часто используется ЧМ колебание с треугольным законом изменения частоты.
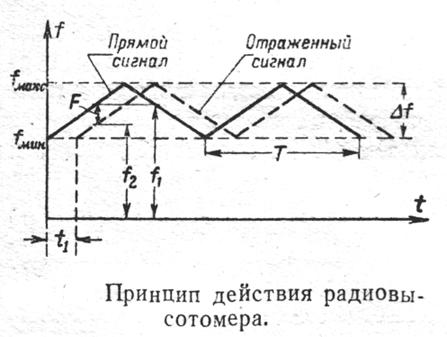
Разносная частота F не будет все время постоянной. На участках, когда частота излученного (прямого) и отраженного сигналов изменяются противоположно, разностная частота будет меньше F. Но так как период модуляции Т много больше времени задержки t1, то этот участок кратковременный, и к заметной ошибке в измерении высоты не приводит.
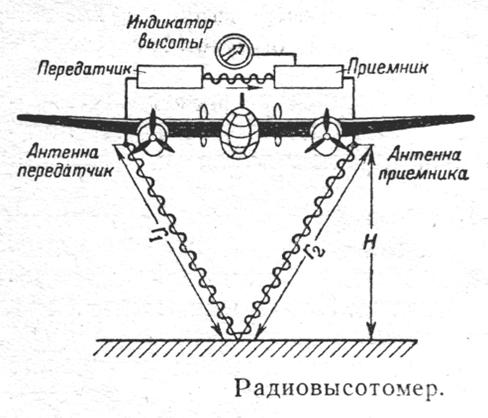
На рисунке выше показан принцип построения высотомера с ЧМ излучением.
Под крыльями самолета установлены антенны: одна передающая, другая приемная. Они разнесены и разделены корпусом самолета, чтобы уменьшить прямое прохождение излученного сигнала в приемник. В приемнике смешиваются принятый сигнал и ослабленный сигнал от передатчика. В результате смешения (а это нелинейное преобразование сигналов) выделяется сигнал разностной частоты. Индикатор высоты представляет собой стрелочный прибор. Шкала его проградуирована в метрах, хотя он измеряет частоту разностного сигнала.
Заключение
Радиолокация представляет собой средство расширения возможностей человека определять наличие и положение объектов за счет использования явлений отражения радиоволн этими объектами. Ее ближайшим конкурентом при выполнении этих функций является оптическая техника, включающая телескопы, которые обладают высокой точностью и обычно имеют фотографические регистрирующие устройства. Преимущество радиолокационных средств по сравнению с оптическими состоит в том, что радиолокационные устройства могут работать в темноте и сквозь облака, обладают большой дальностью действия и позволяют определять дальность до объекта со значительно большей точностью, нежели оптические устройства. Хотя световые волны также являются электромагнитными, но в радиолокации частота их намного ниже. Это позволяет применять радиотехнические методы и схемы.
Развитие радиолокации явилось важной частью технической революции двадцатого века. Военная техника, использующая принципы радиолокации, впервые была создана перед самым началом второй мировой войны; с этого времени наблюдается быстрый и непрерывный прогресс в указанной области.
Практические применения радиолокации в настоящее время отличаются большим разнообразием. Некоторые из наиболее важных задач радиолокации связаны с ее применением в военной технике; сюда относится обзор пространства и обнаружение самолетов противника и наземных подвижных объектов, обеспечение данных для управления орудийным огнем, а также данных для управления ракетами в полете. Кроме того, радиолокационные средства широко используются в навигации как самолетов, так и кораблей (особенно в ночное время и в условиях тумана), они являются важным элементом современных систем управления воздушным движением, используются с целью управления движением автомашин и имеют большое значение для обеспечения прогнозов погоды. Радиолокация — отличное средство для исследования земной атмосферы и ионосферы, а также для изучения метеоров. В настоящее время радиолокационные устройства используются для обзора космического пространства, обнаружения и слежения за искусственными спутниками Земли, а также в системах противоракетной обороны. Также радиолокация применяется для астрономических наблюдений соседних космических тел солнечной системы: Луны, Солнца, Венеры, Марса и Юпитера. Области применения радиолокации по мере дальнейшего освоения космического пространства, по всей вероятности, будут все больше расширяться. Последние годы не менее актуальными стали вопросы подповерхностного зондирования и нелинейной локации. Подповерхностная радиолокация дает информацию о свойствах и параметрах среды, ее неоднородности. Нелинейная радиолокация (поиск элементов с p-n переходом или нелинейной вольтамперной характеристикой), используется при поиске от различных радиозакладок, «жучков» и прочих электронных средств незаконного съема информации, до радиоуправляемых фугасов и взрывных устройств.
Список литературы
импульсная радиолокация координата
1) Перминов И.Г. «Физические основы получения информации». 2006 год.
2) Артамонов В.М. «Электроавтоматика судовых и самолетных радиолокационных станций». 1962 год.
3) Современная радиолокация. Анализ, расчет и проектирование. Под редакцией Кобзарева Ю.В., М., Сов.радио, 1969г.-704стр.
4) Дулевич В.Е. Теоретические основы радиолокации. М., Сов.радио, 1978г. – 608стр.
5) Ширман Я.Д. Теоретические основы радиолокации. М., Сов.радио, 1970г. – 560стр.
Размещено на http://www.
| Запуск теплоходного судна "Cтолетов" | |
|
... оснащение судна 2.1 Радиопеленгатор "Румб" 2.2 Работа эхолота НЭЛ-МЗБ по функциональной электрической схеме 2.3 РЛС "Наяда-5" 2.4 Гирокомпас с ... Отраженный от дна акустический импульс принимается антенной и преобразуется в электрический сигнал. Максимальная дальность обнаружения при высоте установки антенны 20 м над уровнем моря и длине волновода 15 м (при вероятности 0,5): судна водоизмещением 5000 т-16...17 миль ... |
Раздел: Рефераты по транспорту Тип: курсовая работа |
| Использование ЛЧМ сигналов при построении приемника радиолокационной ... | |
|
ПЕРМСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ КУРСОВАЯ РАБОТА по дисциплине: Основы построения РЛС на тему: ИСПОЛЬЗОВАНИЕ ЛЧМ СИГНАЛОВ ПРИ ... 1. Радиолокация с пассивным ответом, основанная на том, что излучаемые электромагнитные колебания (зондирующий сигнал) - отражаются от цели и попадают в приемник РЛС в виде ... Передатчик "О" формирует мощные когерентно-импульсные сигналы с частотой fо, излучаемые через антенну в пространство для обзора заданной зоны поиска целей и генерирующий сигнал ... |
Раздел: Рефераты по коммуникации и связи Тип: курсовая работа |
| Выбор и обоснование тактико-технических характеристик РЛС. Разработка ... | |
|
Министерство образования Украины Национальный авиационный университет Теоретические основы радиолокации Выбор и обоснование тактико-технических ... Радиолокация с пассивным ответом, основанная на том, что излучаемые РЛС колебания - зондирующий сигнал - отражаются от цели и попадают в приемник РЛС в виде отраженного сигнала. 5 РЛС представляет собой импульсный некогерентный радиолокатор со сканирующей в азимутальной плоскости антенной и индикатором "азимут-дальность". |
Раздел: Рефераты по радиоэлектронике Тип: реферат |
| Обеспечение помехопостановки и помехозащиты технических устройств | |
|
РГРТУ Пояснительная записка к курсовому проекту по дисциплине Теоретические основы радиоэлектронной борьбы Студент Ходорченко Виталий Валерьевич ... Как видно на рис.8, при скоростях сближения с целью, больших скорости самолета, отсутствуют сигналы, отраженные от земли, поэтому при атаке сверху вниз в переднюю полусферу цели ... Поскольку для РЛС самолета не представляется возможным реализовать метод непрерывного излучения, так как невозможно разместить две антенны в носовой части самолета, был предложен ... |
Раздел: Рефераты по коммуникации и связи Тип: курсовая работа |
| Разработка радиоприемника | |
|
... произошел от латынского слова locatio - размещение, распределение и означает определение местоположения объекта по сигналам (звуковым, тепловым В 1936 г. макет американской РЛС, работавшиц на частоте 80 МГц, обнаружил самолет на расстоянии 65 км (в 1937 г. у немцев была достигнута дальность 35 км). Первые пять импульсных РЛС (работали на метровых волнах) для обнаружения самолетов были установлены на юго-западном побережье Великобритании в 1936 г. |
Раздел: Рефераты по коммуникации и связи Тип: курсовая работа |