Статья: Synchronization and effect of Zommerfelda as typical resonant samples
Synchronization and Sommerfeld as Typical Resonant Patterns
Part I. Single Driver Example
Kovriguine D.A.
Abstract We analyze a classical problem of oscillations arising in an elastic base caused by rotor vibrations of an asynchronous driver near the critical angular velocity. The nonlinear coupling between oscillations of the elastic base and rotor takes place naturally due to unbalanced masses. This provides typical frequency-amplitude patterns, even let the elastic properties of the beam be linear one. As the measure of energy dissipation increases the effect of bifurcated oscillations can disappear. The latter circumstance indicates the efficiency of using vibration absorbers to eliminate or stabilize the dynamics of the electromechanical system.
Key Words Sommerfeld effect, asynchronous device; Lyapunov criterion, Routh-Hurwitz criterion, stability.
stationary oscillation resonance synchronization
Introduction
The phenomenon of bifurcated oscillations of an elastic base, while scanning the angular velocity of an asynchronous driver, is referred to the well-known Sommerfeld effect [1-9]. Nowadays, this plays the role of one of classical representative examples of unstable oscillations in electromechanical systems, even being the subject of student laboratory work in many mechanical faculties. This effect is manifested in the fact that the descending branch of resonant curve can not be experienced in practice. A physical interpretation is quite simple. The driver of limited power cannot maintain given amplitude of stationary vibrations of the elastic base. Any detailed measurements can reveal that the oscillation frequency of the base is always somewhat higher than that predicted by linear theory. This implies a very reasonable physical argument. With an increase of base vibrations, for example, the geometric nonlinearity of the elastic base should brightly manifest itself, so that this assuredly may lead to the so-called phenomenon of “pulling” oscillations. However, a more detailed mathematical study can demonstrate that the dynamic phenomena associated with the Sommerfeld effect are of more subtle nature. If one interprets this effect as a typical case of resonance in nonlinear systems, then one should come to a very transparent conclusion. The appearance of the frequency-amplitude characteristic naturally encountered in nonlinear systems, say, when regarding the Düffing-type equations, does not necessarily have place due to the geometric nonlinearity of the elastic base. This dependence appears as a result of nonlinear resonant coupling between oscillations of the elastic base and rotor vibrations, even when the elastic properties being absolutely linear one. The latter circumstance may attract an interest in such a remarkable phenomenon, as the effect of Sommerfeld, which is focused in the present paper.
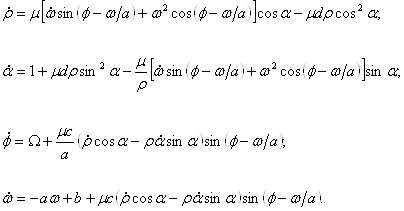
The equations of motion
The equations describing a rotor rolling on an elastic base read [1-6]
![]() ;(1)
;(1)
![]() ,
,
where ![]() is
the mass of a base with
one degree of freedom, characterized by the linear displacement
is
the mass of a base with
one degree of freedom, characterized by the linear displacement ![]() ,
, ![]() is
the elasticity coefficient
of the base,
is
the elasticity coefficient
of the base, ![]() is
the damping coefficient,
is
the damping coefficient,
![]() stands
for the mass of an
eccentric,
stands
for the mass of an
eccentric, ![]() denotes
the radius of inertia of
this eccentric,
denotes
the radius of inertia of
this eccentric, ![]() is
the moment of inertia of
the rotor in the absence of imbalance,
is
the moment of inertia of
the rotor in the absence of imbalance, ![]() is
the driving moment,
is
the driving moment, ![]() describes
the torque resistance of
the rotor. The single device (unbalanced rotor) set on the platform, while the
rotation axis is perpendicular to the direction of oscillation. The angle of
rotation of the rotor
describes
the torque resistance of
the rotor. The single device (unbalanced rotor) set on the platform, while the
rotation axis is perpendicular to the direction of oscillation. The angle of
rotation of the rotor![]() is measured
counter-clockwise. Assume that the moment characteristics and the engine drag
torque are modeled by the simple functions
is measured
counter-clockwise. Assume that the moment characteristics and the engine drag
torque are modeled by the simple functions ![]() and
and ![]() , where
, where![]() is the starting point,
is the starting point, ![]() is
the coefficient
characterizing the angular velocity of the rotor, i.e.
is
the coefficient
characterizing the angular velocity of the rotor, i.e. ![]() ,
, ![]() is
the resistance coefficient. Then the equations
of motion are rewritten as
is
the resistance coefficient. Then the equations
of motion are rewritten as
After introducing the dimensionless variables the basic equations hold true:
where ![]() is
the-small parameter,
is
the-small parameter, ![]() ,
, ![]() ,
, ![]() . Here
. Here![]() stands for the
oscillation frequency of the base,
stands for the
oscillation frequency of the base, ![]() is
the new dimensionless
linear coordinate measured in fractions of the radius of inertia of the
eccentric,
is
the new dimensionless
linear coordinate measured in fractions of the radius of inertia of the
eccentric, ![]() is the dimensionless coefficient of energy
dissipation,
is the dimensionless coefficient of energy
dissipation, ![]() .is the new dimensionless time.
.is the new dimensionless time.
The set (3) is now normalized at the linear part approaching a standard form. First, the equations can be written as a system of four first-order equations
Then we introduce the polar
coordinates, ![]() and
and ![]() . So that the equations take the following
form
. So that the equations take the following
form
Now the set (5) experiences the
transform on the angular variable ![]() . Then the equations obtain the form close
to a standard form
. Then the equations obtain the form close
to a standard form
Here ![]() denotes
the partial angular
velocity of the rotor. The system of equations (6) is completely equivalent to
the original equations. It is not a standard form, allowed for the higher
derivatives [10], but such form is most suitable for the qualitative study of
stationary regimes of motion, due to the explicit presence of generalized velocities
in the right-hand side terms.
denotes
the partial angular
velocity of the rotor. The system of equations (6) is completely equivalent to
the original equations. It is not a standard form, allowed for the higher
derivatives [10], but such form is most suitable for the qualitative study of
stationary regimes of motion, due to the explicit presence of generalized velocities
in the right-hand side terms.
Resonance
We study the resonance phenomenon in
the dynamical system (6). Let![]() , then eqs. (6) are reduced to the following
set:
, then eqs. (6) are reduced to the following
set: ![]() ,
, ![]() ,
, ![]() ,
, ![]() , which has a simple solution
, which has a simple solution
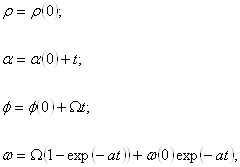
where ![]() ,
, ![]() ,
, ![]() ,
, ![]() are the integration constants. Now the
solution (7) is substituted into the right-hand terms of eqs. (6). Then one discards
all the terms in order
are the integration constants. Now the
solution (7) is substituted into the right-hand terms of eqs. (6). Then one discards
all the terms in order![]() and higher, as well, to
perform the averaging over the period of fast rotating phases. In the problem
(6) the fast variables are the angles
and higher, as well, to
perform the averaging over the period of fast rotating phases. In the problem
(6) the fast variables are the angles![]() and
and ![]() , accordingly, the slow variables are
, accordingly, the slow variables are ![]() and
and ![]() . The average of an arbitrary
function
. The average of an arbitrary
function![]() is calculated as
is calculated as
 .
.
Now the average ![]() is
examined for the
presence of jumps along a smooth change of system parameters. One of which represents
the partial angular velocity
is
examined for the
presence of jumps along a smooth change of system parameters. One of which represents
the partial angular velocity ![]() . It is easy to see that the jump of the
average takes place at the value
. It is easy to see that the jump of the
average takes place at the value ![]() .
.
The equations of slow motions
In the case when the system is far
from resonance, i.e. ![]() , eqs. (6) can easily be solved using the
Poincaré perturbation method applied to the small non-resonant terms in
order
, eqs. (6) can easily be solved using the
Poincaré perturbation method applied to the small non-resonant terms in
order![]() . However, in the resonant case, as
. However, in the resonant case, as![]() , the first-order nonlinear
approximation solution should contain the so-called secular terms appearing due
to the known problems of small denominators. To overcome such a problem one usually
applies the following trick. As soon as
, the first-order nonlinear
approximation solution should contain the so-called secular terms appearing due
to the known problems of small denominators. To overcome such a problem one usually
applies the following trick. As soon as ![]() and the quantities
and the quantities ![]() and
and ![]() are
changing rapidly, with
approximately the same rate, it is natural to introduce a new generalized slow
phase
are
changing rapidly, with
approximately the same rate, it is natural to introduce a new generalized slow
phase ![]() , where
, where ![]() is
a small variation of the
angular velocity. Then after the averaging over the fast variable
is
a small variation of the
angular velocity. Then after the averaging over the fast variable![]() , one obtains the equations for the
slow variables only, which are free of secularity. Such equations are called the
evolution equations or truncated ones. In the case of set (6) the truncated equations
hold true:
, one obtains the equations for the
slow variables only, which are free of secularity. Such equations are called the
evolution equations or truncated ones. In the case of set (6) the truncated equations
hold true:
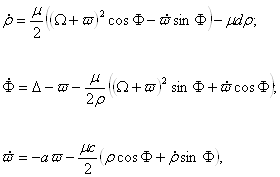
where ![]() is the small frequency
detuning,
is the small frequency
detuning, ![]() is
the new generalized
phase. Note that for the problem of averaging over the fast variable is enough
to write
is
the new generalized
phase. Note that for the problem of averaging over the fast variable is enough
to write ![]() .
.
Stationary oscillations in the absence of energy dissipation
Now the usual condition of a steady
motion, i.e. ![]() , is applied. We are looking now for the stationary
oscillatory regimes in vacuo, i.e.
, is applied. We are looking now for the stationary
oscillatory regimes in vacuo, i.e. ![]() . The solution corresponding to these
regimes reads
. The solution corresponding to these
regimes reads
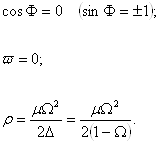
This solution describes a typical
resonant curve at ![]() . The plus sign in front of the unit
is selected when
. The plus sign in front of the unit
is selected when ![]() , otherwise
, otherwise ![]() .
.
The next stage of the study is to test the stability properties of stationary solutions. To solve this problem, one should obtain the equations in perturbations. The procedure for deriving these equations is that, firstly, one performs the following change of variables
where ![]() is
the steady-state
amplitude of oscillations, then after replacing the variables the perturbation equations
get the following form
is
the steady-state
amplitude of oscillations, then after replacing the variables the perturbation equations
get the following form
To solve the stability problem evoking the Lyapunov criterion we formulate the eigenvalue problem defined by the following cubic polynomial, implicitly presented by determinant of the third order
Now we can apply one of the most
widely known criteria, for example, the Hurwitz criterion, for the study the
stability properties in the space of system parameters. The result is that the
descending branch of the resonant curve, when![]() , cannot be practically observed because
of the volatility associated with the fact that the driver is of limited power.
This cannot maintain the given stationary oscillation of the elastic base near
the resonance. This result corresponds to the well-known paradigm associated
with the so-called Sommerfeld effect.
, cannot be practically observed because
of the volatility associated with the fact that the driver is of limited power.
This cannot maintain the given stationary oscillation of the elastic base near
the resonance. This result corresponds to the well-known paradigm associated
with the so-called Sommerfeld effect.
Formally, there are stable stationary
regains, when ![]() . However, this range of angular
velocity is far beyond the accuracy of the first-order nonlinear approximation.
. However, this range of angular
velocity is far beyond the accuracy of the first-order nonlinear approximation.
Damped stationary oscillations
A small surprise is that the response
of the electromechanical system (2) has a significant change in the presence of
even very small energy dissipation. Depending on the parameters of the set (2) the
small damping can lead to typical hysteretic oscillatory patterns when scanning
the detuning parameter![]() . While let the dissipation be
sufficiently large, then a very simple stable steady-state motions, inherent in
almost linear systems, holds true.
. While let the dissipation be
sufficiently large, then a very simple stable steady-state motions, inherent in
almost linear systems, holds true.
From the stationary condition, one
looks for the stationary oscillation regimes ![]() ,
, ![]() and
and ![]() , as
, as ![]() . The equations corresponding to
these regimes are the following ones
. The equations corresponding to
these regimes are the following ones
![]() ;
;
![]() ;
;
![]() .
.
For a small damping the solution of
these equations describes a typical non-unique dependence between the frequency
and amplitude, i.e. ![]() , defined parametrically upon the
phase
, defined parametrically upon the
phase ![]() . Near the resonance
. Near the resonance![]() (
(![]() ), at some given specific parameters
of the problem, say,
), at some given specific parameters
of the problem, say, ![]() ,
, ![]() ,
, ![]() and
and ![]() , the picture of this curve is shown
in Fig. 1. Accordingly, the dependence of the angular velocity is presented in
Fig. 2.
, the picture of this curve is shown
in Fig. 1. Accordingly, the dependence of the angular velocity is presented in
Fig. 2.
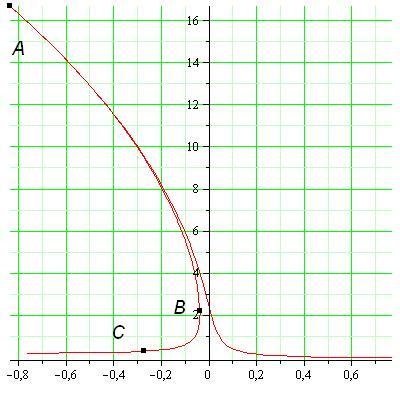
Fig. 1. The frequency-amplitude
dependence![]() near the resonance at
near the resonance at ![]() (arbitrary
units).
(arbitrary
units).

Fig. 2. The angular velocity![]() changes (arbitrary
units).
changes (arbitrary
units).
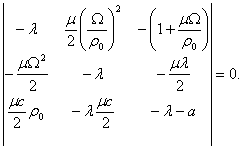
To study the stability problem of stationary solutions to the perturbed equations we should formulate the eigenvalue problem. This leads to the following characteristic cubic polynomial
![]()
with the coefficients[1]
![]() ;
;
 ;
;
 ;
;
 .
.
Now one traces the stability properties
by finding the areas of system parameters by applying the Routh-Hurwitz
criterion, which states the necessary and sufficient conditions of positivity
of the following numbers ![]() ,
, ![]() ,
, ![]() ,
, ![]() . These conditions are violated along the
frequency-amplitude curve when scanning the parameter
. These conditions are violated along the
frequency-amplitude curve when scanning the parameter![]() between the points A
and C. The characteristic
points A and B originate
from the traditional condition that the derivative of function
between the points A
and C. The characteristic
points A and B originate
from the traditional condition that the derivative of function ![]() approaches infinity. The point C
appears due to the multiple and zero valued roots of the characteristic
equation
approaches infinity. The point C
appears due to the multiple and zero valued roots of the characteristic
equation ![]() , as the determinants in the Routh-Hurwitz criterion
approach zero, more precisely,
, as the determinants in the Routh-Hurwitz criterion
approach zero, more precisely, ![]() . At the direct scanning of the
parameter
. At the direct scanning of the
parameter![]() together with increasing the angular velocity
of the driver, one can observe a “tightening” of oscillations up to the point
A. Then, the upper branch of the resonant curve becomes unstable and the
stationary oscillations jump at the lower stable branch. At the reverse scan
the angular velocity of the driver at the point C, in turn, there is a loss of
stability of stationary oscillations at the lower branch and the jumping to
stable oscillations with the greater amplitude at the upper branch of the
resonance curve. The point B, apparently, is physically unrealizable mode of oscillations.
together with increasing the angular velocity
of the driver, one can observe a “tightening” of oscillations up to the point
A. Then, the upper branch of the resonant curve becomes unstable and the
stationary oscillations jump at the lower stable branch. At the reverse scan
the angular velocity of the driver at the point C, in turn, there is a loss of
stability of stationary oscillations at the lower branch and the jumping to
stable oscillations with the greater amplitude at the upper branch of the
resonance curve. The point B, apparently, is physically unrealizable mode of oscillations.
However, with the growth of the dissipation the instability zone shrinks. Then the frequency-amplitude curve becomes unambiguous, and the instability zone is completely degenerated. In this case the Sommerfeld effect also disappears.
Conclusions
Near the resonance the rotor is substantially influenced by the pair of forces acting from the vibrating base. The average value of this moment is a definite value proportional to quadrate of the amplitude of vibrations of the base. Therefore, near the resonance some increase in the angular velocity of the engine is experienced. This leads to the phenomenon of ‘pulling’ hesitation, despite the fact that the elastic properties of the base are linear. Together with the growth of dissipation the zone of the Sommerfeld instability narrows down to its complete disappearance. This leads to the idea of efficiency of utilizing vibration absorbers to stabilize the motion of electromechanical systems.
Acknowledgments
The work was supported in part by the RFBR grant (project 09-02-97053-р поволжье).
References
[1] Vibrations in Engineering, v. 2, Moscow. Mechanical Engineering, 1979: 351 (in Russian).
[2] Frolov K.V. Vibrations of machines with limited capacity power source and the variable parameters (Proc. K.V. Frolov ed.), Nonlinear oscillations and transient processes in machines, Moscow: Nauka, 1972: 5-16 (in Russian).
[3] Kononenko V.O. Nonlinear vibrations of mechanical systems. Kiev: Nauk. Dumka, 1980: 382 (in Russian).
[4] Nagaev R.F. Quasiconservative systems. St. Petersburg: Nauka, 1996: 252 (in Russian).
[5] Blekhman I.I. Synchronization in Nature and Technology. Moscow: Nauka, 1977: 345 (in Russian).
[6] Blekhman I.I., Landa P.S., Rosenblum M.G. Synchronization and chaotization in interacting dynamical systems (J) Appl. Mech. Rev., 1995, 11(1): 733-752.
[7] Samantaray A.K., Dasguptaa S.S.and R. Bhattacharyyaa. Sommerfeld effect in rotationally symmetric planar dynamical systems (J), Int. J. Eng. Sci., 2010, 48(1): 21-36.
[8] Masayoshi Tsuchidaa, Karen de Lolo Guilhermeb and Jose Manoel Balthazarb. On chaotic vibrations of a non-ideal system with two degrees of freedom: Resonance and Sommerfeld effect (J), J. Sound and Vibration, 2005, 282(3-5): 1201-1207.
[9] Leonov G.A., Ponomarenko D.V. and Smirnova V.B. Frequency-domain methods for nonlinear analysis. Theory and applications. Singapore: World Sci., 1996: 498.
[10] Zhuravlev V.F., Klimov D.M. Applied methods in oscillation theory, Moscow: Nauka, 1988: 328 (in Russian).
[1] It should be noted that the characteristic polynomial coefficients are calculated with a somewhat inflated for the first-order approximation accuracy. In fact, it is easy to prove by series expansion in the small parameter. However, the coefficients in the truncated form are such that again lead to a transcendental equation. Therefore, the value of such asymptotics is small.