Контрольная работа: Задачі математичного програмування
Завдання 2
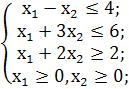
Записати двоїсту задачу до поставленої задачі лінійного програмування. Розв’язати одну із задач симплексним методом і визначити оптимальний план іншої задачі. Оптимальні результати перевірити графічно.
![]()
Розв’язок
Розв’яжемо задачу лінійного програмування симплексним методом.
Визначимо мінімальне значення цільової функції F(X) = 4x1+2x2 при наступних умовах-обмежень.
x1-x2≤4
x1+3x2≤6
x1+2x2≥2
Для побудови першого опорного плану систему нерівностей приведемо до системи рівнянь шляхом введення додаткових змінних.
Оскільки маємо змішані умови-обмеження, то введемо штучні змінні x.
1x1-1x2 + 1x3 + 0x4 + 0x5 = 4
1x1 + 3x2 + 0x3 + 1x4 + 0x5 = 6
1x1 + 2x2 + 0x3 + 0x4-1x5 = 2
Для постановки задачі на мінімум цільову функцію запишемо так:
F(X) = 4x1+2x2 - Mx6 => max
Вважаючи, що вільні змінні рівні 0, отримаємо перший опорний план:
| План | Базис | В | x1 | x2 | x3 | x4 | x5 | х6 |
| 0 | х3 | 4 | 1 | -1 | 1 | 0 | 0 | 0 |
| x4 | 6 | 1 | 3 | 0 | 1 | 0 | 0 | |
| х6 | 2 | 1 | 2 | 0 | 0 | -1 | 1 | |
| Індексний рядок | F(X0) | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
Переходимо до основного алгоритму симплекс-методу.
| План | Базис | В | x1 | x2 | x3 | x4 | x5 | x6 | min |
| 1 | x3 | 4 | 1 | -1 | 1 | 0 | 0 | 0 | 0 |
| x4 | 6 | 1 | 3 | 0 | 1 | 0 | 0 | 2 | |
| x6 | 2 | 1 | 2 | 0 | 0 | -1 | 1 | 1 | |
| Індексний рядок | F(X1) | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
Оскільки, в індексному рядку знаходяться негативні коефіцієнти, поточний опорний план неоптимальний, тому будуємо новий план. У якості ведучого виберемо елемент у стовбці х2, оскільки значення коефіцієнта за модулем найбільше.
| План | Базис | В | x1 | x2 | x3 | x4 | x5 | x6 | min |
| 2 | x3 | 5 | 1.5 | 0 | 1 | 0 | -0.5 | 0.5 | 3.33 |
| х4 | 3 | -0.5 | 0 | 0 | 1 | 1.5 | -1.5 | 0 | |
| x2 | 1 | 0.5 | 1 | 0 | 0 | -0.5 | 0.5 | 2 | |
| Індексний рядок | F(X2) | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
Даний план, також не оптимальний, тому будуємо знову нову симплексну таблицю. У якості ведучого виберемо елемент у стовбці х2.
| План | Базис | В | x1 | x2 | x3 | x4 | x5 | x6 | min |
| 3 | x3 | 2 | 0 | -3 | 1 | 0 | 1 | -1 | 2 |
| X4 | 4 | 0 | 1 | 0 | 1 | 1 | -1 | 4 | |
| X1 | 2 | 1 | 2 | 0 | 0 | -1 | 1 | 0 | |
| Індексний рядок | F(X3) | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| План | Базис | В | x1 | x2 | x3 | x4 | x5 | x6 | min | |||||
| 4 | х5 | 2 | 0 | -3 | 1 | 0 | 1 | -1 | 0 | |||||
| X4 | 2 | 0 | 4 | -1 | 1 | 0 | 0 | 0.5 | ||||||
| X1 | 4 | 1 | -1 | 1 | 0 | 0 | 0 | 0 | ||||||
| Індексний рядок | F(X4) | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||
| План | Базис | В | x1 | x2 | x3 | x4 | x5 | х6 | ||||||
| 5 | х5 | 3.5 | 0 | 0 | 0.25 | 0.75 | 1 | -1 | ||||||
| х2 | 0.5 | 0 | 1 | -0.25 | 0.25 | 0 | 0 | |||||||
| х1 | 4.5 | 1 | 0 | 0.75 | 0.25 | 0 | 0 | |||||||
| Індексний рядок | F(X5) | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||
Оптимальний план можна записати так:
x5 = 3.5
x2 = 0.5
x1 = 4.5
F(X) = 4*4.5 + 2*0.5 = 19
Складемо двоїсту задачу до поставленої задачі лінійного програмування.
y1+y2+y3≥4
-y1+3y2+2y3≥2
4y1+6y2+2y3 => min
y1 ≥ 0
y2 ≥ 0
y3 ≤ 0
Рішення двоїстої задачі дає оптимальну оцінок ресурсів. Використовуючи останню інтиграцію прямої задачі знайдемо,оптимальний план двоїстої задачі. Із теореми двоїстості слідує, що Y = C*A-1.
Сформуємо матрицю A із компонентів векторів, які входять в оптимальний базис.
Визначивши обернену матрицю А-1 через алгебраїчне доповнення, отримаємо:
Як видно із останнього плану симплексної таблиці, обернена матриця A-1 розміщена у стовбцях додаткових змінних.
Тоді Y = C*A-1 =
Запишемо оптимальний план двоїстої задачі:
y1 = 2.5
y2 = 1.5
y3 = 0
Z(Y) = 4*2.5+6*1.5+2*0 = 19
Завдання 3
Розвязати транспортну задачц.
| 1 | 2 | 4 | 1 | 5 | 200 |
| 1 | 2 | 1 | 3 | 1 | 120 |
| 2 | 1 | 3 | 3 | 1 | 150 |
| 100 | 90 | 200 | 30 | 80 |
Розв’язок
Побудова
математичної моделі. Нехай xij — кількість продукції, що перевозиться з і-го
пункту виробництва до j-го споживача ![]() . Оскільки
. Оскільки  , то задачу треба
закрити, тобто збалансувати (зрівняти) поставки й потреби:
, то задачу треба
закрити, тобто збалансувати (зрівняти) поставки й потреби:
![]()
![]()
![]() У нашому
випадку робиться це введенням фіктивного постачальника, оскільки
У нашому
випадку робиться це введенням фіктивного постачальника, оскільки  . З
уведенням фіктивного постачальника
в транспортній таблиці додатково заявляється n робочих клітинок (додатковий
рядок).
. З
уведенням фіктивного постачальника
в транспортній таблиці додатково заявляється n робочих клітинок (додатковий
рядок).
Виникає проблема, які ціни присвоїти цим клітинкам, щоб фіктивний рядок був нейтральним щодо оптимального вибору планових перевезень. Нейтральність забезпечується тим, що всі ціни у фіктивних клітинках вибираються однаковими, а оскільки ці ціни при поставках не повинні впливати на значення цільової функції f, то їх беруть усі рівними нулю.
Занесемо вихідні дані у таблицю.
| В1 | В2 | В3 | В4 | В5 | Запаси | |
| А1 | 1 | 2 | 4 | 1 | 5 | 200 |
| А2 | 1 | 2 | 1 | 3 | 1 | 120 |
| А3 | 2 | 1 | 3 | 3 | 1 | 150 |
| А4 | 0 | 0 | 0 | 0 | 0 | 30 |
| Потреби | 100 | 90 | 200 | 30 | 80 |
Забезпечивши закритість розв'язуваної задачі, розпочинаємо будувати математичну модель даної задачі:
лінійний програмування математичний модель
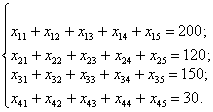
Економічний зміст записаних обмежень полягає в тому, що весь вантаж потрібно перевезти по пунктах повністю.
Аналогічні обмеження можна записати відносно замовників: вантаж, що може надходити до споживача від чотирьох баз, має повністю задовольняти його попит. Математично це записується так:
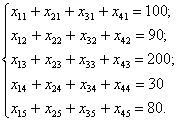
Загальні витрати, пов’язані з транспортуванням продукції, визначаються як сума добутків обсягів перевезеної продукції на вартості транспортування од. продукції до відповідного замовника і за умовою задачі мають бути мінімальними. Тому формально це можна записати так:
min Z = 1x11 + 2x12 + 4x13 + 1x14 +5x15 + 1x21 + 2x22 + 1x23 + 3x24 +1x25 +2x31 + 1x32 + 3x33 + 3x34 +1x35 + 0x41+ 0x42 + 0x43 + 0x44+0x45.
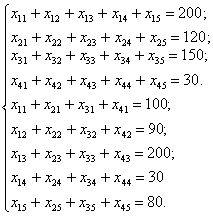
Загалом математична модель сформульованої задачі має вигляд:
min Z = 1x11 + 2x12 + 4x13 + 1x14 +5x15 + 1x21 + 2x22 + 1x23 + 3x24 +1x25 +2x31 + 1x32 + 3x33 + 3x34 +1x35 + 0x41+ 0x42 + 0x43 + 0x44+0x45.
за умов:
![]()
Запишемо умови задачі у вигляді транспортної таблиці та складемо її перший опорний план у цій таблиці методом «північно-західного кута».
| Ai | Bj | ui | ||||
| b1 = 100 | b2 = 90 | b3 = 200 | b4=30 | b5=80 | ||
| а1 = 200 |
1 100 |
2 90 |
4 [-] 10 |
1 [+] |
5 | u1 = 0 |
| а2 = 120 | 1 | 2 |
1 120 |
3 | 1 | u2 = -3 |
| а3 = 150 | 2 | 1 |
3 [+] 70 |
3 [-] 30 |
1 50 |
u3 = -1 |
| а4 = 30 | 0 | 0 | 0 | 0 |
0 30 |
u4 = -2 |
| vj | v1 =1 | v2 =2 | v3 =4 | v4 =4 | V5 =2 |
В результаті отримано перший опорний план, який є допустимим, оскільки всі вантажі з баз вивезені, потреба магазинів задоволена, а план відповідає системі обмежень транспортної задачі.
Підрахуємо число зайнятих клітин таблиці, їх 8, а має бути m+n-1=8. Отже, опорний план є невироджених.
Перевіримо оптимальність опорного плану, складемо систему рівнянь (для заповнених клітин таблиці) для визначення потенціалів першого опорного плану:

Записана система рівнянь є невизначеною, і один з її розв’язків дістанемо, узявши, наприклад, u1 = 0. Тоді всі інші потенціали однозначно визначаються з цієї системи рівнянь: u1 =0, u2 = -3, u3 = -1, u4=-2, v1 =1, v2 =2, v3 =4 v4=4, v5=2. Ці значення потенціалів першого опорного плану записуємо у транспортну таблицю.
Потім згідно з алгоритмом методу потенціалів перевіряємо виконання другої умови оптимальності ui + vj ≤ cij (для порожніх клітинок таблиці):
А1B4 : u1 + v4 = 0 + 4 = 4 > 1;
А1B5 : u1 + v5 = 0 + 2 = 2 < 5;
А2B1 : u2 + v1 = -3 + 1 = -2 < 1;
А2B2 : u2 + v2 = -3 + 2 = -1 < 2;
А2B4 : u2 + v4 = -3 + 4 = 1 < 3;
А2B5 : u2 + v5 = -3 + 2 = -1 < 1;
А3B1 : u3 + v1 = -1 + 1 = 0 < 2;
А3B2 : u3 + v2 = -1 + 2 = 1 = 1;
А4B1 : u4 + v1 = -2 + 1 = -1 < 0;
А4B2 : u4 + v2 = -2 + 2 = 0 = 0;
А4B3 : u4 + v3 = -2 + 4 = 2 > 0;
А4B4 : u4 + v4 = -2 + 4 = 2 > 0.
Опорний план не є оптимальним, тому що існують оцінки вільних клітин для яких ui + vi > cij
А1B4 : u1 + v4 = 0 + 4 = 4 > 1;
А4B3 : u4 + v3 = -2 + 4 = 2 > 0;
А4B4 : u4 + v4 = -2 + 4 = 2 > 0.
Тому від нього необхідно перейти до другого плану, змінивши співвідношення заповнених і порожніх клітинок таблиці. Вибираємо максимальну оцінку вільної клітини (А1B4): 1
Ставимо в ній знак «+». Для визначення клітинки, що звільняється, будуємо цикл, починаючи з клітинки А1B4, та позначаємо вершини циклу почергово знаками «–» і «+». Тепер необхідно перемістити продукцію в межах побудованого циклу. Для цього у порожню клітинку А1B4 переносимо менше з чисел хij, які розміщені в клітинках зі знаком «–». Одночасно це саме число хij додаємо до відповідних чисел, що розміщені в клітинках зі знаком «+», та віднімаємо від чисел, що розміщені в клітинках, позначених знаком «–».
З вантажів хij
що стоять в мінусових клітинах, вибираємо найменше, ![]() , тобто
, тобто ![]() . Додаємо 10 до обсягів вантажів,
що стоять в плюсових клітинах і віднімаємо 10 з Хij, що стоять в мінусових
клітинах. В результаті отримаємо новий опорний план. Усі інші заповнені
клітинки першої таблиці, які не входили до циклу, переписуємо у другу таблицю
без змін. Кількість заповнених клітинок у новій таблиці також має відповідати
умові невиродженості плану, тобто дорівнювати (n + m – 1).
. Додаємо 10 до обсягів вантажів,
що стоять в плюсових клітинах і віднімаємо 10 з Хij, що стоять в мінусових
клітинах. В результаті отримаємо новий опорний план. Усі інші заповнені
клітинки першої таблиці, які не входили до циклу, переписуємо у другу таблицю
без змін. Кількість заповнених клітинок у новій таблиці також має відповідати
умові невиродженості плану, тобто дорівнювати (n + m – 1).
Отже, другий опорний план транспортної задачі матиме такий вигляд:
| Ai | Bj | ui | ||||
| b1 = 100 | b2 = 90 | b3 = 200 | b4=30 | b5=80 | ||
| а1 = 200 |
1 100 |
2 [-] 90 |
4 |
1 [+] 10 |
5 | u1 = 0 |
| а2 = 120 | 1 | 2 |
1 120 |
3 | 1 | u2 = 0 |
| а3 = 150 | 2 |
1 [+] |
3 80 |
3 [-] 20 |
1 50 |
u3 = 2 |
| а4 = 30 | 0 | 0 | 0 | 0 |
0 30 |
u4 = 1 |
| vj | v1 =1 | v2 =2 | v3 =1 | v4 =1 | V5 =-1 |
Перевіримо оптимальність опорного плану. Знайдемо потенціали ui, vi. по зайнятих клітинам таблиці, в яких ui + vi = cij, вважаючи, що u1 = 0.
Опорний план не є оптимальним, тому що існують оцінки вільних клітин для яких ui + vi > cij
(А3B1): 2 + 1 = 3 > 2;
(А3B2): 2 + 2 = 4 > 1;
(А4B1): 1 + 1 = 2 > 0;
(А4B2): 1 + 2 = 3 > 0;
(А4B3): 1 + 1 = 2 > 0;
(А4B4): 1 + 1 = 2 > 0.
Вибираємо максимальну оцінку вільної клітини (А3B2): 1
Для цього в перспективну клітку (А3B2) поставимо знак «+», а в інших вершинах багатокутника чергуються знаки «-», «+», «-». Цикл наведено в таблиці.
З вантажів хij що стоять в мінусових клітинах, вибираємо найменше, тобто у = min (А3B4) = 20. Додаємо 20 до обсягів вантажів, що стоять в плюсових клітинах і віднімаємо 20 з Хij, що стоять в мінусових клітинах. В результаті отримаємо новий опорний план.
| Ai | Bj | ui | ||||
| b1 = 100 | b2 = 90 | b3 = 200 | b4=30 | b5=80 | ||
| а1 = 200 |
1 100 |
2 70 |
4 |
1 30 |
5 | u1 = 0 |
| а2 = 120 | 1 | 2 |
1 120 |
3 | 1 | u2 = -3 |
| а3 = 150 | 2 |
1 20 |
3 [-] 80 |
3 |
1 [+] 50 |
u3 = -1 |
| а4 = 30 | 0 | 0 |
0 [+] |
0 |
0 [-] 30 |
u4 = -2 |
| vj | v1 =1 | v2 =2 | v3 =1 | v4 =1 | V5 =-1 |
Перевіримо оптимальність опорного плану. Знайдемо потенціали ui, vi. по зайнятих клітинам таблиці, в яких ui + vi = cij, вважаючи, що u1 = 0.
Опорний план не є оптимальним, тому що існують оцінки вільних клітин для яких ui + vi > cij
(А4B3): -2 + 4 = 2 > 0
Вибираємо максимальну оцінку вільної клітини (А4B3): 0
Для цього в перспективну клітку (А4B3) поставимо знак «+», а в інших вершинах багатокутника чергуються знаки «-», «+», «-». Цикл наведено в таблиці.
З вантажів хij що стоять в мінусових клітинах, вибираємо найменше, тобто у = min (А4B5) =30. Додаємо 30 до обсягів вантажів, що стоять в плюсових клітинах і віднімаємо 30 з Хij, що стоять в мінусових клітинах.
В результаті отримаємо новий опорний план.
| Ai | Bj | ui | ||||
| b1 = 100 | b2 = 90 | b3 = 200 | b4=30 | b5=80 | ||
| а1 = 200 |
1 100 |
2 70 |
4 |
1 30 |
5 | u1 = 0 |
| а2 = 120 | 1 | 2 |
1 120 |
3 | 1 | u2 = -3 |
| а3 = 150 | 2 |
1 20 |
3 50 |
3 |
1 80 |
u3 = -1 |
| а4 = 30 | 0 | 0 |
0 30 |
0 | 0 | u4 = -4 |
| vj | v1 =1 | v2 =2 | v3 =4 | v4 =1 | V5 =2 |
Перевіримо оптимальність опорного плану, тобто повторюємо описані раніше дії.
Знайдемо потенціали ui, vi. по зайнятих клітинам таблиці, в яких ui + vi = cij, вважаючи, що u1 = 0.
Перевірка останнього плану на оптимальність за допомогою методу потенціалів показує, що він оптимальний.
Розрахуємо значення цільової функції відповідно до другого опорного плану задачі:
Z(x) = 1*100 + 2*70 + 1*30 + 1*120 + 1*20 + 3*50 + 1*80 + 0*30 = 640
За оптимальним планом перевезень загальна вартість перевезень всієї продукції є найменшою і становить 640 грн.
Завдання 4
Знайти графічним
методом екстремуми функції в області, визначеній нерівностями (в усіх варіантах
вважати ![]() )
)
![]() ,
,
![]() ,
,
![]() ,
,
![]()
Розв’язок
Побудуємо область допустимих рішень, тобто вирішимо графічно систему нерівностей. Для цього побудуємо кожну пряму і визначимо півплощини, задані нерівностями (півплощини позначені штрихом).
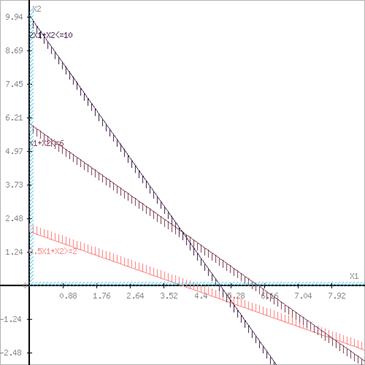
Межі області
Позначимо границі області багатокутника рішень.
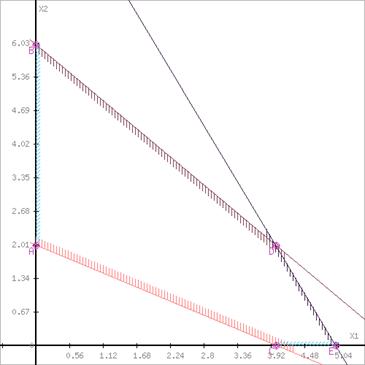
Цільова функція F(x) => min
Розглянемо цільову функцію завдання F = 7X1+6X2 => min.
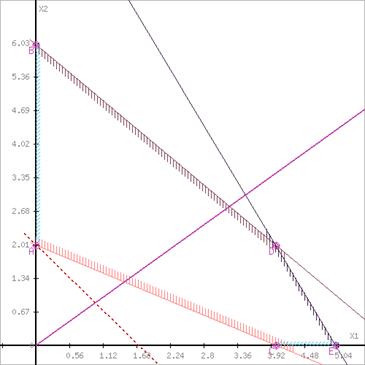
Побудуємо пряму, що відповідає значенню функції F = 0: F = 7X1+6X2 = 0. Будемо рухати цю пряму паралельним чином. Оскільки нас цікавить мінімальне рішення, тому рухався прямо до першого торкання позначеної області. На графіку ця пряма позначена пунктирною лінією.
Рівний масштаб
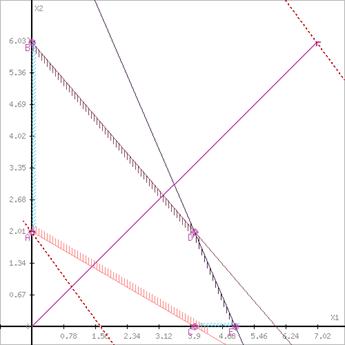
Область допустимих значень необмежена.