Контрольная работа: Математичне програмування
Завдання 1
Зібраний врожай зерна трьох сільськогосподарських артілей повинен бути перевезений на три елеватори, а саме: елеватор А1 потужністю 100 тис. тонн, елеватор А2 – 80 тис. тонн; А3 – 90 тис. тонн. Визначити план перевезення зерна на елеватори, який мінімізує транспортні витрати.
| С/г артіль | Затрати на перевезення 1 т зерна на елеватори, грн. |
Запас зерна, тис. т |
||
| В1 | В2 | В3 | ||
|
А1 |
12,5 | 24,0 | 18,4 | 80 |
|
А2 |
28,3 | 14,5 | 25,7 | 90 |
|
А3 |
15,7 | 20,6 | 16,3 | 100 |
| Потужність елеваторів | 100 | 80 | 90 |
Розв’язок
Побудова математичної моделі. Нехай xij — кількість продукції,
що перевозиться з і-го пункту виробництва до j-го споживача ![]() .
.
Перевіримо необхідність і достатність умов розв'язання задачі:
![]()
![]()
Оскільки  , то умова балансу
дотримується. Запаси рівні потребам. Отже, модель транспортної задачі є
закритою.
, то умова балансу
дотримується. Запаси рівні потребам. Отже, модель транспортної задачі є
закритою.
Занесемо вихідні дані у таблицю.
|
В1 |
В2 |
В3 |
Запаси | |
|
А1 |
12,5 | 24,0 | 18,4 | 80 |
|
А2 |
28,3 | 14,5 | 25,7 | 90 |
|
А3 |
15,7 | 20,6 | 16,3 | 100 |
| Потреби | 100 | 80 | 90 |
Розпочинаємо будувати математичну модель даної задачі:
Економічний зміст записаних обмежень полягає в тому, що весь вантаж потрібно перевезти по пунктах повністю.
Аналогічні обмеження можна записати відносно замовників: вантаж, що може надходити до споживача від чотирьох баз, має повністю задовольняти його попит. Математично це записується так:
![]()
Загальні витрати, пов’язані з транспортуванням продукції, визначаються як сума добутків обсягів перевезеної продукції на вартості транспортування од. продукції до відповідного замовника і за умовою задачі мають бути мінімальними. Тому формально це можна записати так:
minZ=12,5x11+24x12+18,4x13+28,3x21+14,5x22+25,7x23+15,7x31+20,6x32+16,3x33.
Загалом математична модель сформульованої задачі має вигляд:
minZ=12,5x11+24x12+18,4x13+28,3x21+14,5x22+25,7x23+15,7x31+20,6x32+16,3x33.
за умов:
![]()
Запишемо умови задачі у вигляді транспортної таблиці та складемо її перший опорний план у цій таблиці методом «північно-західного кута».
|
Ai |
Bj |
ui |
||
|
b1 = 100 |
b2 = 80 |
b3 = 90 |
||
|
а1 = 80 |
12,5 80 |
24,0 | 18,4 |
u1 = 0 |
|
а2 = 90 |
28,3 [-]20 |
14,5 [+]70 |
25,7 |
u2 = 15,8 |
|
а3 = 100 |
15,7 [+] |
20,6 [-]20 |
16,3 80 |
u3 = 21,9 |
|
vj |
v1 =12,5 |
v2 =-1,3 |
v3 =-5,6 |
В результаті отримано перший опорний план, який є допустимим, оскільки всі вантажі з баз вивезені, потреба магазинів задоволена, а план відповідає системі обмежень транспортної задачі.
Підрахуємо число зайнятих клітин таблиці, їх 5, а має бути m+n-1=5. Отже, опорний план є не виродженим.
Перевіримо оптимальність опорного плану. Знайдемо потенціали ui, vi. по зайнятих клітинам таблиці, в яких ui + vi = cij, вважаючи, що u1 = 0:
u1=0, u2=15,8, u3=21,9, v1=12,5, v2=-1,3, v3=-5,6. Ці значення потенціалів першого опорного плану записуємо у транспортну таблицю.
Потім згідно з алгоритмом методу потенціалів перевіряємо виконання другої умови оптимальності ui + vj ≤ cij(для порожніх клітинок таблиці).
Опорний план не є оптимальним, тому що існують оцінки вільних клітин для яких ui + vi>cij
(3;1): 21.9 + 12.5 > 15.7; ∆31 = 21.9 + 12.5 - 15.7 = 18.7
Тому від нього необхідно перейти до другого плану, змінивши співвідношення заповнених і порожніх клітинок таблиці. Вибираємо максимальну оцінку вільної клітини (3;1): 15.7. Для цього в перспективну клітку (3;1) поставимо знак «+», а в інших вершинах багатокутника чергуються знаки «-», «+», «-». Цикл наведено в таблиці.
Тепер необхідно перемістити продукцію в межах побудованого циклу. З вантажів хij що стоять в мінусових клітинах, вибираємо найменше, тобто у = min (3, 2) = 20. Додаємо 20 до обсягів вантажів, що стоять в плюсових клітинах і віднімаємо 20 з хij, що стоять в мінусових клітинах. В результаті отримаємо новий опорний план.
Усі інші заповнені клітинки першої таблиці, які не входили до циклу, переписуємо у другу таблицю без змін. Кількість заповнених клітинок у новій таблиці також має відповідати умові невиродженості плану, тобто дорівнювати (n + m – 1).
Отже, другий опорний план транспортної задачі матиме такий вигляд:
|
Ai |
Bj |
ui |
||
|
b1 = 100 |
b2 = 80 |
b3 = 90 |
||
|
а1 = 80 |
12,5 80 |
24,0 | 18,4 |
u1 = 0 |
|
а2 = 90 |
28,3 [-] 0 |
14,5 90 |
25,7 [+] |
u2 = 15,8 |
|
а3 = 100 |
15,7 [+] 20 |
20,6 |
16,3 [-]80 |
u3 = 3,2 |
|
vj |
v1 =12,5 |
v2 =-1,3 |
v3 =13,1 |
Перевіримо оптимальність опорного плану. Знайдемо потенціали ui, vi. по зайнятих клітинам таблиці, в яких ui + vi = cij, вважаючи, що u1 = 0.
Опорний план не є оптимальним, тому що існують оцінки вільних клітин для яких ui + vi>cij
(2;3): 15.8 + 13.1 > 25.7; ∆23 = 15.8 + 13.1 - 25.7 = 3.2
Вибираємо максимальну оцінку вільної клітини (2;3): 25.7
Для цього в перспективну клітку (2;3) поставимо знак «+», а в інших вершинах багатокутника чергуються знаки «-», «+», «-». Цикл наведено в таблиці.
З вантажів хij що стоять в мінусових клітинах, вибираємо найменше, тобто у = min (2, 1) = 0. Додаємо 0 до обсягів вантажів, що стоять в плюсових клітинах і віднімаємо 0 з Хij, що стоять в мінусових клітинах. В результаті отримаємо новий опорний план.
|
Ai |
Bj |
ui |
||
|
b1 = 100 |
b2 = 80 |
b3 = 90 |
||
|
а1 = 80 |
12,5 80 |
24,0 | 18,4 |
u1 = 0 |
|
а2 = 90 |
28,3 |
14,5 90 |
25,7 0 |
u2 = 12,6 |
|
а3 = 100 |
15,7 20 |
20,6 |
16,3 80 |
u3 = 3,2 |
|
vj |
v1 =12,5 |
v2 =1,9 |
v3 =13,1 |
Перевіримо оптимальність опорного плану, тобто повторюємо описані раніше дії.
Знайдемо потенціали ui, vi. по зайнятих клітинам таблиці, в яких ui + vi = cij, вважаючи, що u1 = 0.
Перевірка останнього плану на оптимальність за допомогою методу потенціалів показує, що він оптимальний.
Розрахуємо значення цільової функції відповідно до другого опорного плану задачі:
F(x) = 12.5*80 + 14.5*90 + 15.7*20 + 16.3*80 = 3923
За оптимальним планом перевезень загальна вартість перевезень всієї продукції є найменшою і становить 3923 грн.
Завдання 2
математична модель екстремум транспортна задача
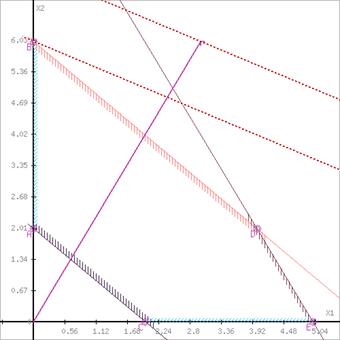
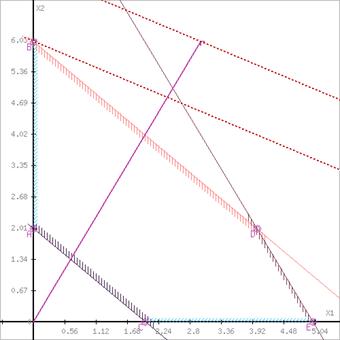
Записати двоїсту задачу до поставленої задачі лінійного програмування. Розв’язати одну із задач симплексним методом і визначити оптимальний план іншої задачі. Оптимальні результати перевірити графічно.
![]()
Розв’язок
Розв’яжемо задачу лінійного програмування симплексним методом.
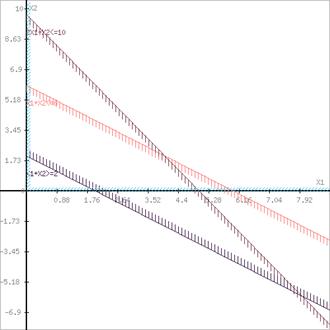
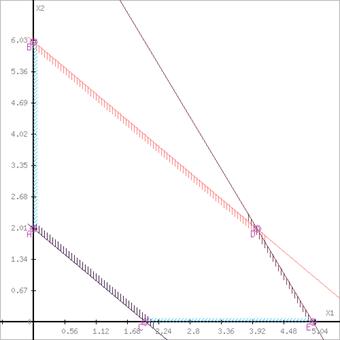
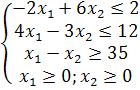
Визначимо максимальне значення цільової функції F(X) = 3x1+x2 за таких умов-обмежень.
-2x1+6x2≤2
4x1-3x2≤12
x1-x2≥3
Для побудови першого опорного плану систему нерівностей наведемо до системи рівнянь шляхом введення додаткових змінних (перехід до канонічної форми).
-2x1 + 6x2 + 1x3 + 0x4 + 0x5 = 2
4x1-3x2 + 0x3 + 1x4 + 0x5 = 12
1x1-1x2 + 0x3 + 0x4-1x5 = 3
Введемо штучні змінні x.
-2x1 + 6x2 + 1x3 + 0x4 + 0x5 + 0x6 = 2
4x1-3x2 + 0x3 + 1x4 + 0x5 + 0x6 = 12
1x1-1x2 + 0x3 + 0x4-1x5 + 1x6 = 3
Для постановки завдання на максимум цільову функцію запишемо так:
F(X) = 3x1+x2 - Mx6 =>max
Отриманий базис називається штучним, а метод рішення називається методом штучного базису.
Причому штучні змінні не мають відношення до змісту поставленого завдання, однак вони дозволяють побудувати стартову точку, а процес оптимізації змушує ці змінні приймати нульові значення та забезпечити допустимість оптимального рішення.
З рівнянь висловлюємо штучні змінні:
x6 = 3-x1+x2+x5
які підставимо в цільову функцію:
F(X) = 3x1 + x2 - M(3-x1+x2+x5) =>max
або
F(X) = (3+1M)x1+(1-1M)x2+(-1M)x5+(-3M) =>max
Матриця коефіцієнтів A = a(ij) цієї системи рівнянь має вигляд:
Базисні перемінні це змінні, які входять тільки в одне рівняння системи обмежень і притому з одиничним коефіцієнтом.
Вирішимо систему рівнянь відносно базисних змінних:
x3, x4, x6,
Вважаючи, що вільні змінні рівні 0, отримаємо перші опорний план:
X1 = (0,0,2,12,0,3)
| План | Базис | В |
x1 |
x2 |
x3 |
x4 |
x5 |
x6 |
| 0 |
x3 |
2 | -2 | 6 | 1 | 0 | 0 | 0 |
|
x4 |
12 | 4 | -3 | 0 | 1 | 0 | 0 | |
|
x6 |
3 | 1 | -1 | 0 | 0 | -1 | 1 | |
| Індексний рядок | F(X0) | -3M | -3-1M | -1+1M | 0 | 0 | 1M | 0 |
Переходимо до основного алгоритму симплекс-методу.
| План | Базис | В |
x1 |
x2 |
x3 |
x4 |
x5 |
x6 |
min |
| 1 |
x3 |
2 | -2 | 6 | 1 | 0 | 0 | 0 | 0 |
|
x4 |
12 |
4 |
-3 | 0 | 1 | 0 | 0 |
3 |
|
|
x6 |
3 | 1 | -1 | 0 | 0 | -1 | 1 | 3 | |
| Індексна рядок | F(X1) | -3M |
-3-1M |
-1+1M | 0 | 0 | 1M | 0 | 0 |
Оскільки, в індексному рядку знаходяться негативні коефіцієнти, поточний опорний план неоптимальний, тому будуємо новий план. У якості ведучого виберемо елемент у стовбці х1, оскільки значення коефіцієнта за модулем найбільше.
| План | Базис | В |
x1 |
x2 |
x3 |
x4 |
x5 |
x6 |
| 2 |
x3 |
8 | 0 | 4.5 | 1 | 0.5 | 0 | 0 |
|
x1 |
3 | 1 | -0.75 | 0 | 0.25 | 0 | 0 | |
|
x6 |
0 | 0 | -0.25 | 0 | -0.25 | -1 | 1 | |
| Індексна рядок | F(X2) | 9 | 0 | -3.25+0.25M | 0 | 0.75+0.25M | 1M | 0 |
Остаточний варіант симплекс-таблиці оптимальний, тому що в індексному рядку знаходяться позитивні коефіцієнти.
Оптимальний план можна записати так:
x3 = 8
x1 = 3
x6 = 0
F(X) = 3*3 = 9
Складемо двоїсту задачу до прямої задачі.
-2y1+4y2+y3≥3
6y1-3y2-y3≥1
2y1+12y2+3y3 =>min
y1 ≥ 0
y2 ≥ 0
y3 ≤ 0
Рішення двоїстої задачі дає оптимальну систему оцінок ресурсів.
Використовуючи останню ітерацію прямої задачі знайдемо, оптимальний план двоїстої задачі.
З першої теореми двоїстості випливає, що Y = C*A-1.
Складемо матрицю A з компонентів векторів, що входять в оптимальний базис.
Визначивши зворотну матрицю А-1 через алгебраїчні доповнення, отримаємо:
Як видно з останнього плану симплексного таблиці, зворотна матриця A-1 розташована в стовпцях додаткових змінних .
Тоді Y = C*A-1 =
Оптимальний план двоїстої задачі дорівнює:
y1 = 0
y2 = 0.75
y3 = 0
Z(Y) = 2*0+12*0.75+3*0 = 9
Завдання 3
Розв’язати транспортну задачу.
| 1 | 4 | 7 | 9 | 1 | 250 |
| 2 | 3 | 1 | 2 | 4 | 300 |
| 2 | 1 | 3 | 1 | 4 | 150 |
| 110 | 80 | 100 | 90 | 70 |
Розв’язок
Побудова математичної моделі. Нехай xij — кількість продукції,
що перевозиться з і-го пункту виробництва до j-го споживача ![]() . Оскільки
. Оскільки  , то задачу треба закрити,
тобто збалансувати (зрівняти) поставки й потреби:
, то задачу треба закрити,
тобто збалансувати (зрівняти) поставки й потреби:
![]()
![]()
![]() У
нашому випадку робиться це введенням фіктивного постачальника, оскільки
У
нашому випадку робиться це введенням фіктивного постачальника, оскільки  . З
уведенням фіктивного споживача транспортній таблиці додатково заявляється n
робочих клітинок.
. З
уведенням фіктивного споживача транспортній таблиці додатково заявляється n
робочих клітинок.
Ціни, додатковим клітинкам, щоб фіктивний стовбець був нейтральним щодо оптимального вибору планових перевезень, призначаються усі рівні нулю.
Занесемо вихідні дані у таблицю.
|
В1 |
В2 |
В3 |
В4 |
В5 |
В6 |
Запаси | |
|
А1 |
1 | 4 | 7 | 9 | 1 | 0 | 250 |
|
А2 |
2 | 3 | 1 | 2 | 4 | 0 | 300 |
|
А3 |
2 | 1 | 3 | 1 | 4 | 0 | 150 |
| Потреби | 110 | 80 | 100 | 90 | 70 | 250 |
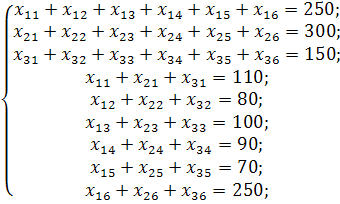
Забезпечивши закритість розв'язуваної задачі, розпочинаємо будувати математичну модель даної задачі:
Економічний зміст записаних обмежень полягає в тому, що весь вантаж потрібно перевезти по пунктах повністю.
Аналогічні обмеження можна записати відносно замовників: вантаж, що може надходити до споживача від чотирьох баз, має повністю задовольняти його попит. Математично це записується так:
![]()
Загальні витрати, пов’язані з транспортуванням продукції, визначаються як сума добутків обсягів перевезеної продукції на вартості транспортування од. продукції до відповідного замовника і за умовою задачі мають бути мінімальними. Тому формально це можна записати так:
minZ=1x11+4x12+7x13+9x14+1x15+0x16+2x21+3x22+1x23+2x24+4x25+0x26+2x31+1x32+3x33+1x34+ +4x35+0x36.
Загалом математична модель сформульованої задачі має вигляд:
minZ=1x11+4x12+7x13+9x14+1x15+0x16+2x21+3x22+1x23+2x24+4x25+0x26+2x31+1x32+3x33+1x34+ +4x35+0x36.
за умов:
![]()
Запишемо умови задачі у вигляді транспортної таблиці та складемо її перший опорний план у цій таблиці методом «північно-західного кута».
|
Ai |
Bj |
ui |
|||||
|
b1 = 110 |
b2 = 80 |
b3 = 100 |
b4=90 |
b5=70 |
b6=250 |
||
|
а1 = 250 |
1 110 |
4 80 |
7 [-] 60 |
9 |
1 [+] |
0 |
u1 = 0 |
|
а2 = 300 |
2 | 3 |
1 [+] 40 |
2 90 |
4 [-] 70 |
0 100 |
u2 = -6 |
|
а3 = 150 |
2 | 1 | 3 | 1 | 4 |
0 150 |
u3 = -6 |
|
vj |
v1 = 1 |
v2 = 4 |
v3 = 7 |
v4 = 8 |
v5 = 10 |
v6 = 6 |
В результаті отримано перший опорний план, який є допустимим, оскільки всі вантажі з баз вивезені, потреба магазинів задоволена, а план відповідає системі обмежень транспортної задачі.
Підрахуємо число зайнятих клітин таблиці, їх 8, а має бути m+n-1=8. Отже, опорний план є не виродженим.
Перевіримо оптимальність опорного плану. Знайдемо потенціали ui, vi. по зайнятих клітинам таблиці, в яких ui + vi = cij, вважаючи, що u1 = 0:
u1 + v1 = 1; 0 + v1 = 1; v1 = 1
u1 + v2 = 4; 0 + v2 = 4; v2 = 4
u1 + v3 = 7; 0 + v3 = 7; v3 = 7
u2 + v3 = 1; 7 + u2 = 1; u2 = -6
u2 + v4 = 2; -6 + v4 = 2; v4 = 8
u2 + v5 = 4; -6 + v5 = 4; v5 = 10
u2 + v6 = 0; -6 + v6 = 0; v6 = 6
u3 + v6 = 0; 6 + u3 = 0; u3 = -6
Ці значення потенціалів першого опорного плану записуємо у транспортну таблицю.
Потім згідно з алгоритмом методу потенціалів перевіряємо виконання другої умови оптимальності ui + vj ≤ cij(для порожніх клітинок таблиці).
Опорний план не є оптимальним, тому що існують оцінки вільних клітин для яких ui + vi>cij
(1;5): 0 + 10 > 1; ∆15 = 0 + 10 - 1 = 9
(1;6): 0 + 6 > 0; ∆16 = 0 + 6 - 0 = 6
(3;4): -6 + 8 > 1; ∆34 = -6 + 8 - 1 = 1
Тому від нього необхідно перейти до другого плану, змінивши співвідношення заповнених і порожніх клітинок таблиці. Вибираємо максимальну оцінку вільної клітини (1;5): 1. Для цього в перспективну клітку (1;5) поставимо знак «+», а в інших вершинах багатокутника чергуються знаки «-», «+», «-». Цикл наведено в таблиці.
Тепер необхідно перемістити продукцію в межах побудованого циклу. З вантажів хij що стоять в мінусових клітинах, вибираємо найменше, тобто у = min (1, 3) = 60. Додаємо 60 до обсягів вантажів, що стоять в плюсових клітинах і віднімаємо 60 з хij, що стоять в мінусових клітинах. В результаті отримаємо новий опорний план.
Для цього у порожню клітинку (1;5) переносимо менше з чисел хij, які розміщені в клітинках зі знаком «–». Одночасно це саме число хij додаємо до відповідних чисел, що розміщені в клітинках зі знаком «+», та віднімаємо від чисел, що розміщені в клітинках, позначених знаком «–».
Усі інші заповнені клітинки першої таблиці, які не входили до циклу, переписуємо у другу таблицю без змін. Кількість заповнених клітинок у новій таблиці також має відповідати умові невиродженості плану, тобто дорівнювати (n + m – 1).
Отже, другий опорний план транспортної задачі матиме такий вигляд:
|
Ai |
Bj |
ui |
|||||
|
b1 = 110 |
b2 = 80 |
b3 = 100 |
b4=90 |
b5=70 |
b6=250 |
||
|
а1 = 250 |
1 110 |
4 [-] 80 |
7 | 9 |
1 [+] 60 |
0 |
u1 = 0 |
|
а2 = 300 |
2 | 3 |
1 100 |
2 90 |
4 [-] 10 |
0 [+] 100 |
u2 = 3 |
|
а3 = 150 |
2 |
1 [+] |
3 | 1 | 4 |
0 [-] 150 |
u3 = 3 |
|
vj |
v1 = 1 |
v2 = 4 |
v3 = -2 |
v4 = -1 |
v5 = 1 |
v6 = -3 |
Перевіримо оптимальність опорного плану. Знайдемо потенціали ui, vi. по зайнятих клітинам таблиці, в яких ui + vi = cij, вважаючи, що u1 = 0.
Опорний план не є оптимальним, тому що існують оцінки вільних клітин для яких ui + vi>cij
(2;1): 3 + 1 > 2; ∆21 = 3 + 1 - 2 = 2
(2;2): 3 + 4 > 3; ∆22 = 3 + 4 - 3 = 4
(3;1): 3 + 1 > 2; ∆31 = 3 + 1 - 2 = 2
(3;2): 3 + 4 > 1; ∆32 = 3 + 4 - 1 = 6
(3;4): 3 + -1 > 1; ∆34 = 3 + -1 - 1 = 1
Вибираємо максимальну оцінку вільної клітини (3;2): 1
Для цього в перспективну клітку (3;2) поставимо знак «+», а в інших вершинах багатокутника чергуються знаки «-», «+», «-». Цикл наведено в таблиці.
З вантажів хij що стоять в мінусових клітинах, вибираємо найменше, тобто у = min (2, 5) = 10. Додаємо 10 до обсягів вантажів, що стоять в плюсових клітинах і віднімаємо 10 з Хij, що стоять в мінусових клітинах. В результаті отримаємо новий опорний план.
|
Ai |
Bj |
ui |
|||||
|
b1 = 110 |
b2 = 80 |
b3 = 100 |
b4=90 |
b5=70 |
b6=250 |
||
|
а1 = 250 |
1 110 |
4 [-] 70 |
7 | 9 |
1 70 |
0 [+] |
u1 = 0 |
|
а2 = 300 |
2 | 3 |
1 100 |
2 90 |
4 |
0 110 |
u2 = -3 |
|
а3 = 150 |
2 |
1 [+] 10 |
3 | 1 | 4 |
0 [-] 140 |
u3 = -3 |
|
vj |
v1 = 1 |
v2 = 4 |
v3 = 4 |
v4 = 5 |
v5 = 1 |
v6 = 3 |
Перевіримо оптимальність опорного плану. Знайдемо потенціали ui, vi. по зайнятих клітинам таблиці, в яких ui + vi = cij, вважаючи, що u1 = 0.
Опорний план не є оптимальним, тому що існують оцінки вільних клітин для яких ui + vi>cij
(1;6): 0 + 3 > 0; ∆16 = 0 + 3 - 0 = 3
(3;4): -3 + 5 > 1; ∆34 = -3 + 5 - 1 = 1
Вибираємо максимальну оцінку вільної клітини (1;6): 0
Для цього в перспективну клітку (1;6) поставимо знак «+», а в інших вершинах багатокутника чергуються знаки «-», «+», «-». Цикл наведено в таблиці.
З вантажів хij що стоять в мінусових клітинах, вибираємо найменше, тобто у = min (1, 2) = 70. Додаємо 70 до обсягів вантажів, що стоять в плюсових клітинах і віднімаємо 70 з Хij, що стоять в мінусових клітинах.
В результаті отримаємо новий опорний план.
|
Ai |
Bj |
ui |
|||||
|
b1 = 110 |
b2 = 80 |
b3 = 100 |
b4=90 |
b5=70 |
b6=250 |
||
|
а1 = 250 |
1 110 |
4 | 7 | 9 |
1 70 |
0 70 |
u1 = 0 |
|
а2 = 300 |
2 | 3 |
1 100 |
2 [-] 90 |
4 |
0 [+] 110 |
u2 = 0 |
|
а3 = 150 |
2 |
1 80 |
3 |
1 [+] |
4 |
0 [-] 70 |
u3 = 0 |
|
vj |
v1 = 1 |
v2 = 1 |
v3 = 1 |
v4 = 2 |
v5 = 1 |
v6 = 0 |
Перевіримо оптимальність опорного плану. Знайдемо потенціали ui, vi. по зайнятих клітинам таблиці, в яких ui + vi = cij, вважаючи, що u1 = 0.
Опорний план не є оптимальним, тому що існують оцінки вільних клітин для яких ui + vi>cij
(3;4): 0 + 2 > 1; ∆34 = 0 + 2 - 1 = 1
Вибираємо максимальну оцінку вільної клітини (3;4): 1
Для цього в перспективну клітку (3;4) поставимо знак «+», а в інших вершинах багатокутника чергуються знаки «-», «+», «-». Цикл наведено в таблиці.
З вантажів хij що стоять в мінусових клітинах, вибираємо найменше, тобто у = min (3, 6) = 70. Додаємо 70 до обсягів вантажів, що стоять в плюсових клітинах і віднімаємо 70 з Хij, що стоять в мінусових клітинах.
В результаті отримаємо новий опорний план.