Лабораторная работа: Налагоджування та програмування промислового робота МП-9С
Лабораторна робота
Тема: Налагоджування та програмування промислового робота МП-9С
Мета роботи: Отримати навички налагоджування та програмування промислового робота.
Обладнання та пристрої:
1. Промисловий робот М.1І-9С.
2. Набір деталей.
У загальному випадку робот складається з 4 систем: виконавчої (рушійної), керуючої (інтелектної), інформаційно-вимірювальної (сенсорної) та системи зв'язку.
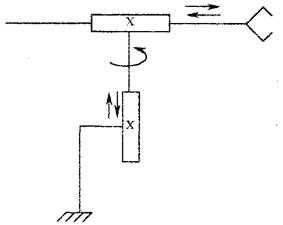
Рис.2.1 Кінематична схема робота МП-9С
На маніпулятор подається напруга постійного струму 24±2,4 В від пристрою управління, що підключений до мережі змінного струму напругою 220 В. В маніпуляторі на кожний рух, крім захвата, встановлено два електропневматичних клапана, оснащених дроселями, регулювання яких дозволяє змінювати швидкість руху по кожній координаті. Позиціювання маніпулятора виконується по кінцевим регулюємим упорам.
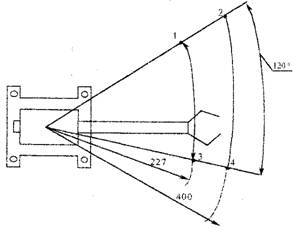
Рис.2.2 Робоча зона робота
промисловий робот програма налагоджування
Послідовність і кількість рухів маніпулятора відповідно до прийнятої технологічної схеми встановлюється вводом програми з пульта керування.
Сигнал про виконання кожного руху маніпулятора видають контакти магнітокеруємі електричні при наближенні до цих постійних магнітів, встановлених на рухомих частинах.
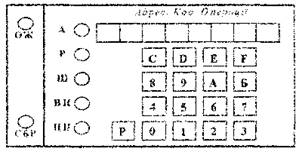
Рис.2.3 Пульт керування робота
Основними режимами роботи ПК є:
1. Автоматичний (режим „А”) - робота під керуванням записаної у пам'ять програми.
2. Ручний (режим „Р”) - робота по командам, що задаються з пульта керування вручну.
3. Кроковий (режим „Ш”) - крокове виконання програми. Після кожного виконання команди робота ПК зупиняється.
4. Ввід програми (режим „ВП”) - запис у пам'ять робочих програм, що вводяться з пульта керування.
5. Перегляд програми (режим „ПП”) - вивід складових робочих програм на одностроковий дисплей.
6. Функціональна клавіатура (режим „Ф” з додатковою індикацією на дисплеї).
Індивідуальне завдання
Скласти програму для виконання наступних операцій:
Захопити деталь в т.1, перемістити в т.4 і залишивши її повернутись в т.1.
Розробка програми подана у таблиці:
| Формат команди | Клавіші | Дія, що виконується |
|
F400 F100 F300 FA00 F500 FБ00 F400 F000 F200 F500 FА00 F400 F100 F300 |
4 1 3 А 5 Б 4 0 2 5 А 4 1 3 |
Підняття Втягування руки Поворот вліво Розтискання схвата Опускання Стискування схвата Підняття Висування руки Поворот в право Опускання Розтискання схвата Підняття Втягування руки Поворот вліво |
Висновок: на даній лабораторній роботі ми отримали навички налагодження та програмування промислового робота. Також дійшли висновку, що використання такого промислового робота МП-9С та технологічного обладнання з ЧПК дозволяє оперативно переходити з однієї операції на іншу, дає можливість комплексної автоматизації дрібносерійного та серійного виробництва, що характеризуються великими об’ємами та широкою номенклатурою продукції, яка випускається, а також підвищити продуктивність виробництва.
| Антифашиський Рух Опору в роки Великої Вітчизняної війни на території ... | |
|
... національний педагогічний університет імені Володимира Гнатюка Кафедра історії України Антифашиський Рух опору в роки Великої Вітчизнної війни на ... Де було введено в дію деякі мілкі чи окремі цехи, шахти робочі систематично зривали роботу. Керівним органам партизанського руху, командирам і комісарам партизанських загонів на рівні з бойовою роботою розгорнути і вести серед населення постійну політичну роботу. |
Раздел: Рефераты по истории Тип: дипломная работа |
| Формування в учнів умінь розв"язувати задачі на рух | |
|
Зміст Вступ 1. Теоретичні основи розв"язування задач на рух 1.1 Роль задач у початковому курсі математики 1.2 Місце задач на рух у системі складених ... Індивідуальна самостійна робота передбачає розв'язування задачі кожним учнем окремо. На основі відповідних показників ми визначили уміння і навички, пов"язані із розв"язуванням різновидів задач на рух. |
Раздел: Рефераты по педагогике Тип: дипломная работа |
| Використання комп"ютера на уроках художньо-естетичного циклу в ... | |
|
ЗМІСТ ВСТУП Розділ 1. Програмне забезпечення в роботі вчителя початкової школи 1.1 Інформаційно-комунікаційні технології в освіті 1.3 Здоров"я і комп ... Комплекси вправ для очей мають бути представлені на плакаті в кабінеті (класі), або роздруковані та покладені на кожне робоче місце для індивідуального користування. На трудовому навчанні в 1-4 класах програмою передбачені навчальні екскурсії на робочі місця працівників різних сфер діяльності. |
Раздел: Рефераты по педагогике Тип: дипломная работа |
| Оптимізація параметрів динамічної системи підресорювання корпуса БТР | |
|
ВСТУП Розвитку бронетранспортерів (БТР) в останні часи приділяється значна увага у багатьох країнах. Хоча на розробку машин цього класу значний вплив ... З іншого боку, підвіска повинна бути по можливості більш жорсткою, щоб збільшити стійкість і керованість колісної машини, а саме - щоб не виникали небезпечні крени на поворотах, не ... Система рівнянь (5.17) описує рух колісної машини по нерівностях у кожний момент часу та представляє собою математичну модель руху машини. |
Раздел: Рефераты по транспорту Тип: дипломная работа |
| Напрямки розвитку малого бізнесу в Миколаївській області | |
|
ЗМІСТ ВСТУП РОЗДІЛ 1. ТЕОРЕТИЧНІ ОСНОВИ ІСНУВАННЯ МАЛОГО БІЗНЕСУ В УКРАЇНІ 1.1 Роль малого бізнесу в економіці розвинутих держав світу та зарубіжний ... Вказані положення отримали в подальшому певний розвиток в інших нормативних документах, були втілені у регіональних програмах розвитку малого бізнесу тощо. Робота за програмами мікрокредитування є хорошою PR-кампанією, здатною принести популярність банку серед широкого кола потенційних клієнтів. |
Раздел: Рефераты по экономике Тип: дипломная работа |