Курсовая работа: Параметрическая идентификация динамических характеристик процесса формования изделий из композитов в автоклаве
Федеральное агентство по образованию
Уфимский государственный авиационный
технический университет
Кумертауский филиал
Кафедра Промышленная автоматика
Курсовая работа
Тема: Параметрическая идентификация динамических характеристик процесса формования изделий из композитов в автоклаве
Кумертау – 2011
Содержание
1. Выбор структуры АСУ ТП
2. Идентификация объекта
3. Калибровка технологического оборудования и измерительных средств
4. Неисправности и способы их устранения
5. Рассмотрим замкнутую и разомкнутую системы с помощью matlab
6. Проверка качества САУ
Литература
Приложение
1. Выбор структуры АСУ ТП
При разработке проекта использованы следующие научно исследовательские работы:
Разработка техпроекта и изготовление модулей системы контроля и регулирования температур для производства изделий вертолета из композиционных материалов.
Изыскание метода нагрева и разработка конструкторской документации опытного образца установки и технологического процесса формования каркаса из полимерных композиционных материалов изделия 226.
В соответствие с требования технического задания (ТЗ) выбор структуры АСУТП определяется необходимостью использовать АСУ ТП как типовой элемент автоматизации производства с объемом обрабатываемой информации, достаточной для обслуживания участка цеха с однородным технологическим оборудованием (ТО).
Ведение операций на ТО предполагает включение нагрева, выход на заданный режим за определенное время, поддержание в течение установленного по технологии времени заданной температуры при заданном вакууме в пневмосистеме. Необходимо бывает также изменение по программе вакуумирования. Во время ведения операции и в аварийной ситуации необходимо управлять исполнительными устройствами, а также и воспринимать и инициативные сигналы.
Автоматизированными функциями АСУ ТП поэтому являются следующие:
-формирование и хранение ШИМ сигналов для регулирующих воздействий для получения заданной величины параметра техпроцесса;
-формирование дискретных управляющих воздействий на исполнительные устройства;
-регистрация параметров техпроцесса на машинописном протоколе;
-отображение оперативной информации;
-регистрация и индикация временных интервалов и реального времени ведения техпроцесса;
-прием и обработка инициативных сигналов;
-коммутация и преобразование в цифровую форму сигналов с датчиков;
-пуск и остановка программы и оперативный ввод значения.
Эти функции определяют весь объем внешних связей АТП. Для реализации этих функций АСУТП выполняет следующие внутренние функции:
- линеаризацию зависимости результирующего кода от физического параметра;
- хранение задания в цифровой форме в течение техпроцесса;
- усреднение в заданном интервале времени значений контролируемого параметра ;
- вычисление интегральной составляющей регулирующего воздействия;
- вычисление пропорциональной составляющей регулирующего воздействия;
- накопление данных о текущих параметрах;
- формирование протокола с выводами о конечном результате ведения операции с конкретной деталью;
- диспетчеризация и временная синхронизация работы АСУ ТП.
Для обеспечения этих функций выбрана структура АТП на базе многоканальных термоэлектрических преобразователей типа ТХК и диалоговычислительного комплекса Пентиум-4.
Устройства ввода-вывода дискретных сигналов, микроконтроллер SLC – 500 таймер, ТХК, регулятор температуры ЦРТ.
В качестве средств ЭВМ в состав АТП.
По сравнению с двухпозиционными регуляторы обеспечивают более высокую точность регулирования, т.к. организуется возможность выключения и включения нагрева при достижении нескольких частей заданной температуры, т.е. средняя мощность нагрева поставлена в зависимость не только от заданной температуры, но и от величины рассогласования достигнутой и заданной температуры.
Способ отслеживания величины рассогласования называется законом регулирования.
В ТХК выбран пропорционально-интегральный закон, регулирования (ПИ).
ПИ - закон описывается выражением
![]() ,
,
где У - регулирующее воздействие регулятора;
X - регулируемая величина;
К - коэффициент пропорциональности;
Т - постоянная времени интегрирования.
ПИ - закон регулирования позволяет уменьшить или увеличить скорость изменения тока нагревательного элемента соответственно подходе или удалении от заданного значения температуры нагревательного элемента, что позволяет избежать перерегулирования при дестабилизирующем воздействии на объект. При значительном отклонении температуры нагревателя qн от заданного значения температуры qз при qн<qз ток через нагревательный элемент максимальный и скорость нарастания температуры максимальная.
При подходе к qз среднее значение тока падает, скорость увеличения qN падает, предотвращая заброс температуры.
Получение пропорциональной части ПИ закона регулирования организовано по методу широко-импульсной модуляции мощности нагревателя, при котором длительность включенной состояние нагревателя и, следовательно, мощность нагрева остановится пропорциональная коду отклонения регулируемой температуры от заданной.
Алгоритм получения интегральной составляющей реализован в ЭВМ на базе решения дифференциального уравнения передаточной функции апериодического звона.
![]() ,
,
где qП - qу - текущее отклонение температуры процесса отправки;
К - коэффициент усиления;
Т - постоянная времени интегратора.
С помощью изменения Кд коэффициента при интегральной составляющей и Т постоянной времени интегрирования возможен по оптимальной переходной характеристики регулятора объекта.
Функционирование АТП связано с приёмом обработкой и выдачей дискретных сигналов.
По условиям техпроцесса в нормальных и аварийных ситуациях бывает необходимо воздействовать на то или другое исполнительное устройство. Такими устройствами могут быть двухпозиционные ключи, включающие звуковую и световую сигнализацию при аварии, и задающие сигналы на срабатывание пневмоклапанов для измерения давления в пневмосистеме.
Программное управление состояниями двухпозиционных ключей осуществляется через модули кодового управления (МКУ). В качестве УВК предусмотрено наличие двух 32-каналъных модуль МКУ.
При функционировании ТП бывает необходимость фиксировать факт изменения состояния инициативного объекта адрес устройства, в котором изменилось состояние.
Функционирование АТП связано с приемом, обработкой и выдачей дискретных сигналов.
По условиям техпроцесса в нормальных и аварийных ситуациях бывает необходимо воздействовать на то или другое исполнительное устройство. Такими устройствами могут быть двухпозиционные ключи, включающие звуковую и световую сигнализацию при аварии, или подающие сигналы на срабатывание пневмоклапанов для изменения давления в пневмосистеме.
Программное управление состояниями двухпозиционных ключей осуществляется через модули кодового управления (МКУ). В составе АТП предусмотрено наличие двух 32-канальных модулей МКУ.
При функционировании АСУ ТП на базе УВК бывает необходимо фиксировать факт изменения состояния инициативного объекта и адреса устройства, в котором изменилось состояние.
Необходимость возникает в регламентной ситуации, когда, например, пуск программы надо осуществить при готовности к началу операции всех составных частей АСУ ТП.
Для связи ЭВМ с магистралью АТП, следовательно, всеми модулями, входящие в состав АТП предназначен контроллер программируемый SHC - 500 интерфейс ИЭ - 6О, выполненный в виде ячейки, вставляемой в блок сопряжения П – 4.
В канале ЭВМ адреса и данные передаются последовательно по времени по одним и тем же шинам КДА от ИЭ-60 к контроллеру адреса и данные передаются в параллельном ходе по разным шинам и с разнесением по времени.
Контроллер выполняет следующие функции:
- программный обмен данным между магистралью АТП и ЭВМ по 16-разрядным шинам, при котором передача адреса прямая, а передача функции Р - через память контроллера, куда она заносится предыдущей командой;
- прерывание программы ЭВМ по запросам 13 модулей с выдачей на шину данных адрес - вектора прерывания старшего по приоритету запроса;
- пересылку данных в память ЭВМ по 6-ти запросам, старшим по приоритету.
- общий регламент функционирования АТП АСУ ТП определяется требованиями техпроцесса проведения той иди иной операции и задается рабочей программой П – 4.
Регламент функционирования ТП видоизменяется в зависимости от цели применения. Можно различить следующие цели применения:
- идентификация объекта регулирования;
- калибровка технологического оборудования (ТО) и измерительных средств;
- выполнение основного алгоритма техпроцесса;
- идентификация аварийной ситуации
Использование АТП в качестве типового проектного решения (ТПР) для различных ТП определяет даль его применения при идентификации объекта, т.е. для правильного выбора коэффициентов К1 и К2 пропорциональной и интегральной частей регулирующего воздействия в зависимости от инерционных свойств конкретного технологического оборудования (в дальнейшем - объекта).
2. Идентификация объекта
Регламент при идентификации объекта следующий:
а) вводится задание, достаточное для достижения температуры; равной 2/2 qмах - мах. значение по технологии температуры объекта (ТО);
б) Заверяется температура нагретого объекта qоб1, после чего температура задания qзад программно уменьшается до нуля на каналах регулятора, обслуживающих исследуемый объект.
Объект свободно охлаждается. Температура объекта при этом изменяется со временем по закону:
![]() ;
;
где qср- температура окружающей среды
Тоб - постоянная времени объекта.
При Т = Тоб запишется в виде:
![]()
По известным qоб1 и qср перед началом охлаждения вычисляется qоб1=qоб(tоб) а в процессе охлаждения объекта эта температуре фиксируется и замеряется время от начала охлаждения до момента Достижения qоб2=qоб(tоб), т.е. постоянная времени объекта Тоб при свободном охлаждении.
в) Без вычисления интегральной составляющей при произвольном коэффициенте К1 (при пропорциональной части регулирующего воздействия) начинается нагрев объекта путем введения задания.
При этом ток через нагревательный элемент (любой из всех расположенных на объекте) будет:

где Uпит - напряжение питающее нагреватель
R - сопротивление нагревателя
tц - период между двумя повторными включениями одного канала
tц длительность части tц в течение которой нагрев включен
![]() - при включении нагревателя на полную
мощность равно
- при включении нагревателя на полную
мощность равно ![]()
При нагревании объекта (имеется в виду нагревательный
элемент соединений с исследуемым технологическим оборудованием), температура меняется
по закону ![]()
где qск - скачок температуры нагревателя, соответствующий скачку тока в нагревателе при выбранном К1;
Тнэ - постоянная времени системы нагреватель - объект при нагревании;
qоб0 - температура объекта вначале нагрева.
В момент времени t1 = 0.1tоб и t2 = 0.2tоб.
В процессе нагрева определяется Тоб3 и Тобл; и из уравнений:
![]()
![]()
Определяется коэффициент, характеризующий конструктивные особенности нагревателя с точки зрения передачи тепла объекту.
![]()
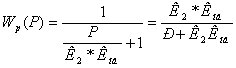
Температура на входе регулирующего элемента Тр при пропорционально-интегральном законе регулирования
![]()
где Кр - коэффициент передачи регулятора
ТИ - время изодрома, в течение которого первоначальное значение выходной величины регулятора удваивается вследствии действия только интегральной части.
![]() , при экспоненциальном законе изменения
Dq
, при экспоненциальном законе изменения
Dq
![]() ,
,
где tоб - время в течении которого qоб достигает 0.64 qзад, а Dq= 0,36qзад. При переходе к регулирующему току
где ![]() и
и ![]()
- коэффициент при пропорциональной и интегральной части.
Разомкнутая система регулирования имеет передаточные функции:
![]()
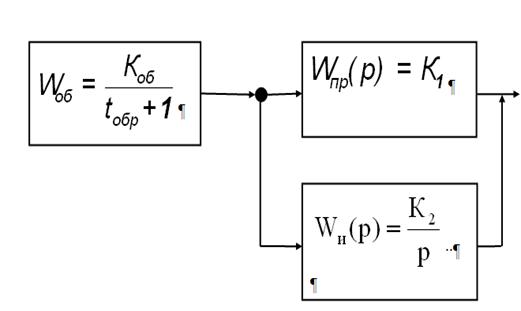
Рисунок 1 - Разомкнутая система регулирования.
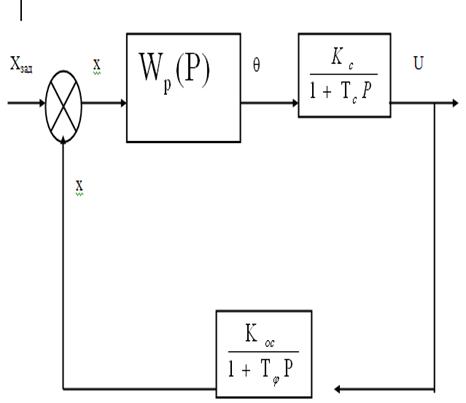
Рисунок 2 - Замкнутая система регулирования.
p – оператор Лапласа.
Только при условиях ![]() передаточная функция системы
экспоненциальная, т.е. наиболее устойчива.
передаточная функция системы
экспоненциальная, т.е. наиболее устойчива.
Если ![]() то передаточная функция примет вид:
то передаточная функция примет вид:
![]()
Передаточная функция замкнутой системы регулирования
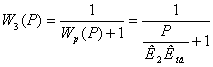
По аналогии передаточной функции RС фильтра коэффициент при операторе ф - постоянная времени.
Считаем что ![]()
Таким образом, имеются следующие выражения для определения отношения К1 и К2
![]()
![]()
![]() ;
; ![]()
Отсюда
![]()
![]()
![]() ;
;
г) Интегральная составляющая в ЭВМ вычисляется как выходная величина интегратора, на вход которого подана решетчатая функция DТ(t) значения которой фиксируются в моменты времени tn = Ту.
Ту - время между двумя измерениями температуры объекта.
Выходная величина интегратора запишется в виде выражения:
![]()
Для выражения Ки через К1 и К2 (3) приравняем выражение (4) и интегральную составляющую из (2) в значениях температуры:


![]()
Этот безразмерный коэффициент используется в программе для деления интегральной составляющей по (4).д) При выбранных К1 и К2 и полученному из (5) Кд оценивается качество регулирования системы по трем показателей:
- точность регулирования;
- технологически заданной скорости выхода на режим;
- отсутствие автоколебаний (число перерегулирований должно быть не более 3-х).
При отклонении показателей от допустимых значений необходимо несколько изменить К1 и К2 и повторить проверку качества регулирования.
Рекомендации по изменению К1 и К2:
- при большое числе перерегулирований К2 увеличить;
- при недостаточной скорости нагрева К2 уменьшить;
- при большой погрешности регулятора К2 увеличить.
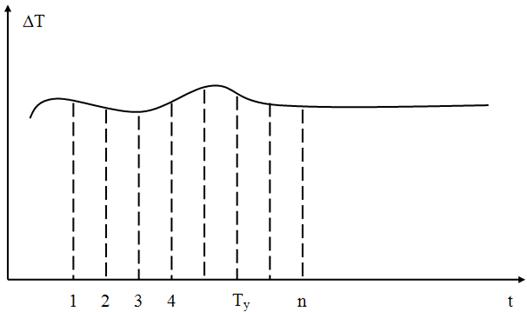
Рисунок 3 - Дискретизация сигнала по времени.
3 Калибровка технологического оборудования и измерительных средств
При использовании УВК в АСУ ТП одна из решаемых задач – это калибровка технологического оборудования и измерительных средств. Эта задача связана с изменением основного регламента функционирования УВК.
Задача калибровки - установить достоверность регистрации параметров ж обеспечить сохранение этой достоверности в течение заданного временного интервала.
К вопросам калибровки относится аттестация и поверка датчиков.
Наряду с традиционными способами аттестации возможно использованию УВК в качестве измерительного, регистрирующего средства с возможностью выдачи протокола.
Регламент работы в этом случае - измерение в контрольных точках э.д.с. термопары с вычислением отклонений от значений по ГОСТ 3044-84 градуировки термопар.
При обслуживании конкретного ТО с помощью УВК необходимо найти правильное соотношение между температурой задания и реальной температурой объекта, подвергающегося термической обработке. Это связано с тем, что термопары, как правило, не размещаются в активной зоне, например, в клеевом шве. Между температурой термопары и технологически заданной температурой существует различие. Оно неоднозначно по всей длине ТО и может меняться со временем. Поэтому задача калибровки - для конкретного ТО в каждой точке установить это соответствие. Для этого случая регламент функционирования УВК следующий.
Образцовый объект с термопарами, расположенными в зоне, где по технологии должна поддерживаться заданная температура приводится в состояние теплового равновесия при этой температуре с помощью УВК. Термопары, связанные с нагревателями ТО, присоединяются к свободным измерительным каналам УВК. Температуры, измеренные этими термопарами, в дальнейшем будут считаться температурами заданий в этих точках на период до следующей калибровки.
Периодической калибровке необходимо подвергать измерительные каналы УВК. Допускается калибровать каналы по образцовым напряжениям с выводом на печать значений температуры. При этом устанавливается соответствие шкалы измерения температуры 3000 ед = 250°С линейность кода по шкале и определяется предел основной приведенной погрешности измерения параметров.
При работе АТП по основному алгоритму работы системы регулирования периодически подтверждается заявленная точность регулирования параметров техпроцесса.
4. Неисправности и способы их устранения
Основным регламентом функционирования АТП является последовательность действий, обусловленных требованиями техпроцесса и обеспеченных рабочей программой. В общем виде диаграмма типового техпроцесса представлена на рис.5
t0 - включение системы;
t1 - увеличение параметра;
t2 - поддержание равновесия;
t3 - 2-ое увеличение параметра;
t4 - поддержание равновесия;
t5 - достижение режима;
t6 - поддержание режима;
t7 - выход из режима.
Регламент работы УВК АСУ ТП в момент запуска системы и в аварийных ситуациях определяется тестами поиска неисправности и действиями по их ликвидации.
Для обоснования соответствия качества, характеристикам, установленным в техническом задании рассмотрены источники погрешности АТП.
В схеме цифрового регулятора температуры (ТХК)
применена микросхема АЦП - 572 ПВ1. По справочные данным 572ПВ1 имеет нелинейность
2 ед МЗР (младшего значащего разряда) и дифференциальную нелинейность - 4 ед. МЗР
(при максимальной тактовой частоте). Так как тактовая частота ТХК равна ![]() мах, то можно считать,
что составляющая погрешности от нелинейности Пн= Зед.
мах, то можно считать,
что составляющая погрешности от нелинейности Пн= Зед.
Изменение температуры окружающей среды ЦРТ можно считать от 10 до 40°С. При температурном коэффициенте нелинейности aл=12*10-3 ед/°С температурная составляющая Пнто=0,4 ед.
При температурном коэффициенте погрешности полной шкалы п.ш.a= 37* *10-3ед/°С погрешность полной шкалы Пп.ш.то= 1.2 ед.
Погрешность установки шкалы, с помощью многооборотного переменного резистора может быть не более Пу= 2 ед.
Погрешность двухпроводного коммутатора с внутренним сопротивлением ключей »200 Ом и входным сопротивлением 100к0м. Изменение сопротивления ключа может быть до 20%, что составит 40 Ом, что составляет 0,04 % от 100кОм. При полной шкале в 3000 ед., погрешность от неоднородности ключей коммутатора составит Пк = 1,2 ед.
Коэффициент усиления усилителя с обратной связью
![]() .
.
В ТХК входит каскад усилителя на микросхеме 284УД1 имеет К = 10, а К0 = =20000. Пусть нестабильность К0 = 10%.
Так как ![]() то
то ![]()
Второй каскад масштабного усилителя увеличивает эту нестабильность в 40 раз. В результате получаем погрешность от входного усилителя
![]()
Погрешность моста для учета напряжения холодного спая Пм складывается из погрешности его, плеч, выполненных из пяти резисторов типа С2-29 с величинами 0,1 Ом.
![]() от 1000 единиц, снимаемых с моста.
Относительно 3000 единиц полной шкалы ПМ будет в 3 раза меньше, т.е.
от 1000 единиц, снимаемых с моста.
Относительно 3000 единиц полной шкалы ПМ будет в 3 раза меньше, т.е.
![]() , а в единицах
, а в единицах
![]()
Погрешность линеаризации Пл определяется максимальной величиной разницы между поправками зон сопряжения Dmax.
При изменении зон через 64 единицы
Dmax» 8 единиц = Пл
Суммарная погрешность:
![]()
![]()
что составляет менее 1% от шкалы.
Управляющий вычислительный комплекс УВК включает в себя устройства, обеспечивающие его стыковку с исполнительными элементами АСУ ТП. Это - кроссовый шкаф холодных спаев (КШХС) в кроссовые панели.
КШХС предназначен для обеспечения перехода выводов термопары типа ХК на медные провода измерительных трактов. КШХС представляет собой пассивную термостат с уплотнением в местах ввода и вывода проводов. Термостатирование позволит сократить влияние внешних температурных скачков и тем самым снизит объем устройств для хранения кода напряжения холодного спая Uхс, Для измерения напряжения холодного спая в КШХС расположен низкоомный мост. Uхс измеряется при включении нулевого канала ЦРТ, одновременно с уровнем нуля, запоминается и служит для коррекции результатов измерения по другим каналам. Кроссовые панели служат для присоединения жгутов, связывающих УВК с тиристорными шкафами силового управления, пультами управления пневмосистемой и источниками питания.
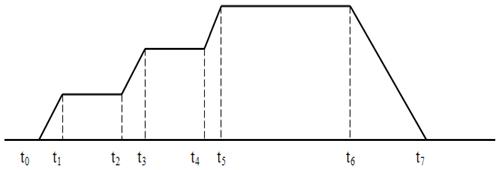
Рисунок 5 - Диаграмма типового техпроцесса.
5. Рассмотрим замкнутую и разомкнутую системы с помощью matlab
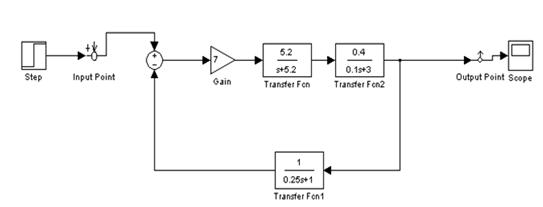
Рисунок 6 - Структурная схема САУ (замкнутая)
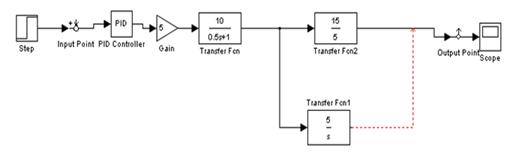
Рисунок 7 - Структурная схема САУ (разомкнутая) системы с помощью matlab
6. Проверка качества САУ
Устойчивость — это свойство САУ возвращаться в заданный или близкий к нему установившийся режим после всякого выхода из него в результате какого-либо воздействия.
Устойчивость по Ляпунову
Впервые свойства устойчивости были исследованы русским ученым А.М.Ляпуновым в 1892 г. в работе «Общая задача об устойчивости движения». Он ввел понятия возмущенного и невозмущенного движений, асимптотически устойчивого движения. Теоремы А. М. Ляпунова позволяют судить об устойчивости нелинейных реальных САУ по их линеаризованным уравнениям.
По Ляпунову, если корни дифференциального уравнения линеаризованной системы содержат только отрицательные вещественные части, то линеаризованная система является устойчивой (невозмущенное движение асимптотически устойчиво) и никакие добавки в виде членов с различными нелинейностями не могут сделать систему неустойчивой. Определяя устойчивость линеаризованной системы, можно говорить и о свойствах устойчивости реальной системы. По расположению корней (Рисунок 8) понятно что исследуемые система является устойчивыми.
На рисунке 9 изображена АФЧХ системы, с помощью которой можно определить критерии устойчивости по теории Найквиста. Этот критерий называется точечным критерием (предложен в 1932 г. американским ученым Г. Найквистом). Он позволяет судить об устойчивости замкнутой системы по амплитудно-фазовой характеристике разомкнутой системы. В ТАУ этот критерий был по-новому обоснован, обобщен и применен Михайловым в 1938 г., поэтому его также называют КУ Найквиста—Михайлова. АФЧХ разомкнутой САУ можно получить как аналитически, так и экспериментально, что выгодно отличает критерий от алгебраических КУ. КУ Найквиста имеет ясный физический смысл: связь стационарных частотных свойств разомкнутой САУ с нестационарными свойствами замкнутой САУ. По Найквисту, для устойчивости САУ необходимо и достаточно чтобы ее АФЧХ не охватывала критическую точку (-1;0) при изменении частоты от 0 до ∞.
В соответствии с критерием Найквиста АФЧХ синтезированной системы не охватывает выше упомянутую критическую точку – поэтому является устойчивой, при этом запас по амплитуде ΔL=∞, а по фазе Δφ≈920. Запас устойчивости необходим, для того чтобы система оставалась устойчивой при перегрузках.
ЛЧХ (рисунок 10) служат для определения устойчивости системы по взаиморасположению ЛАЧХ и ЛФЧХ. Если частота среза ЛАЧХ расположена правее точки в которой ЛФЧХ достигает угла в -1800 то система устойчива.
Литература
1.Дорф Р. Современные системы управления / Р. Дорф, Р. Бишоп; пер. с англ. Б.И. Копылова. - М.: Лаборатория Базовых Знаний, 2002. - 832 с.
2.Грачева, Л.Н. Экспериментальное построение переходной характеристики ТП полимеризации лонжерона лопасти : материалы республиканской научно-практической конференции «Инновационные процессы в системе непрерывного образования в целях кадрового обеспечения предприятий южного региона республики Башкортостан» / Л.Н.Грачева, Н.И.Тюков, Е.А. Закурдаева. – Уфа: РИОРУНМЦ МО РБ, - 2004.- С. 121-128.
3.Ерофеев, А.А. Теория автоматического управления: учебник для вузов / А.А. Ерофеев. - СПб.: Политехника, 2003. - 302 с.
4.Первушин, Ю.С. Композиционные материалы: учебное пособие по дисциплине: «Технология композиционных материалов». - Уфа:УГИС, 2005.-с
5.Галлиев А. Л., Галиева Р. Г. Элементы и устройства автоматизированных систем управления: Учеб.посоие. – Стерлитамак: Стерлитамак. Гос .пед .акад., 2007. – 220 с.
Приложение
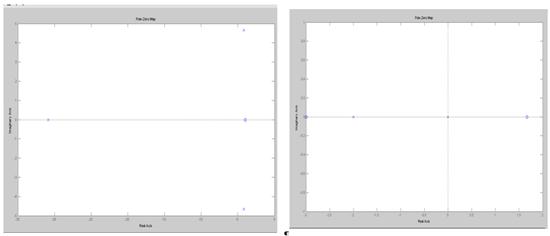
Рисунок 8 - Положение корней и нулей системы замкнутой и разомкнутой
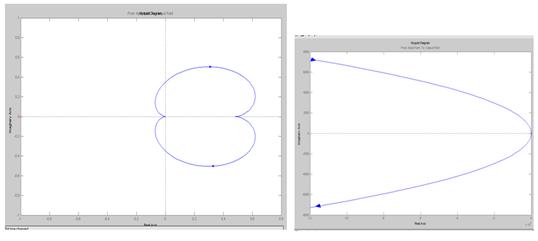
Рисунок 9 –Критерий Найквиста замкнутой и разомкнутой систем
технический проект композиционный материал
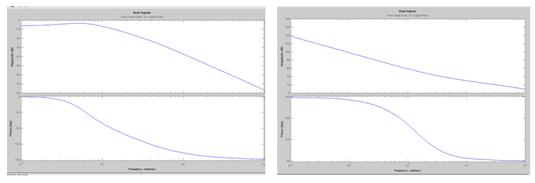
Рисунок 10 – логарифмические АЧХ и ФЧХ системы замкнутой и разомкнутой
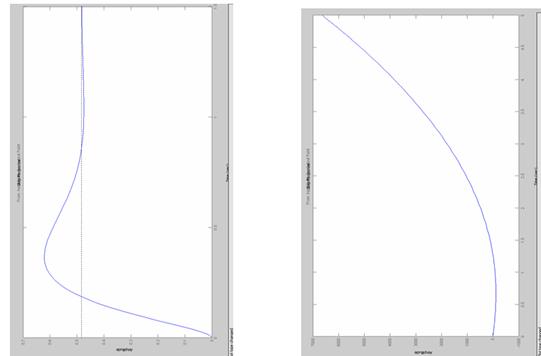
Рисунок 11 - Переходная характеристика замкнутой и разомкнутой систем
| Оборудование летательных аппаратов | |
|
Практическая работа N12-6 СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ СВС-72-3 (Продолжительность практической работы - 4 часа) I. ЦЕЛЬ РАБОТЫ Целью работы ячвляется ... мально-замкнутыми (без давления) и нормально-разомкнутыми контактами. Катушки логометра К1 и К2 |
Раздел: Рефераты по авиации и космонавтике Тип: реферат |
| Средства учета количества электричества и электрической энергии | |
|
РЕФЕРАТ Дипломный проект состоит из 109 листов пояснительной записки, содержащей 12 таблиц и 17 иллюстраций, и 6 листов графической части. В дипломном ... При выполнении операции нагрева с использованием устройства дозирования электрической энергии за время протекания тока между электрическими контактами в массе металла выделится ... В настоящее время в энергетике используются преимущественно структуры с аналоговыми ИПМ, например, в системах электропередачи, на АСУ ТП энергообъектов, на электротранспорте. |
Раздел: Рефераты по физике Тип: дипломная работа |
| Основы теории и технологии контактной точечной сварки | |
|
Министерство общего и профессионального образования Российской Федерации Сибирский государственный аэрокосмический университет имени академика М. Ф ... Тогда равновесие элемента замкнутой силовой системы электрод-детали-электрод (одной детали), имеющей при сварке одну степень свободы - перемещение по координате z (ось электродов ... Рассчитанное в блоке 8 значение усилие сжатия электродов сравнивается с заданным FЭt (блок 9). Пока выполняется условие, что , цикл по dПt продолжается с тем же шагом ѬdПj ... |
Раздел: Промышленность, производство Тип: учебное пособие |
| Разработка автоматизированной системы управления электроснабжением КС ... | |
|
Аннотация В дипломном проекте разрабатывается автоматизированная система управления энергохозяйством Сосногорского ЛПУМГ, разработана ее ... Для АСУ ТП остальных объектов энергоснабжения, управляющих сравнительно медленными тепломеханическими процессами, такое быстродействие не требуется. реле фиксации команд KQQ2 остается в том же положении (контакт 12 разомкнут, 14 - замкнут); |
Раздел: Рефераты по физике Тип: дипломная работа |
| Система управления узлом дегидрирования этилбензола | |
|
СОДЕРЖАНИЕ Введение 1. Характеристика объекта автоматизации 1.1 Описание технологического процесса 1.2 Основные характеристики и особенности ... Область, ограниченная этой кривой и прямыми К1=0 и К2=0, является областью заданного запаса устойчивости для выбранных значений Т и К3. 3) В качестве оптимальных настроек ПИ и ПИД-регулятора принимаются такие, при которых система обладает запасом устойчивости не ниже заданного (m = m3) и коэффициент при ... |
Раздел: Промышленность, производство Тип: дипломная работа |