Реферат: Трикутник Рьоло (треугольник Рёло)
Трикутник Рьоло (Треугольник РЁЛО)
ВСТУП
Ще з часів Древнього Сходу, від цивілізації Єгипту і Вавилона дійшли до нас древні математичні тексти, що свідчать про ту велику увагу, що приділяли наші предки розвитку геометрії [1]. У Єгипті і Вавилоні не було великих земельних площ, і господарча діяльність вимагала проведення значних іригаційних робіт, земельного упорядкування, зокрема установки границь ділянок після повеней, що приносили річковий мул, який руйнував границі земельних наділів.
Зміцнення централізованих держав сприяло створенню міст, розвитку торгівлі. Виникали математичні задачі, зв'язані з виміром площ полів, об'ємів гребель і зерносховищ і т. д. Термінів “трикутник”, “чотирикутник”, “фігура” тоді ще не було. У папірусах, що дійшли до нас, мова йшла про пряме, косе чи кругле поле, ділянку з границею, довжиною і шириною. Площі прямокутників, трикутників і трапецій древні люди вже тоді обчислювали за точними правилами, що зайвий раз доводило, наскільки важливими для повсякденного життя були ці прості геометричні фігури.
У Древній Греції протягом трьох століть учені створили теорії, глибину яких змогли по-справжньому зрозуміти й оцінити лише математики XIX-XX століть. Слава засновника давньогрецької математики належить Піфагору Самоському, що перетворив геометрію зі зборів рецептів рішень різних задач в абстрактну науку. Ця наука розглядає вже не площі полів, місткість зерносховищ, дамб чи штабелів цегли, а геометричні фігури-абстракції, ідеалізації визначених властивостей реальних об'єктів.
З часом знання людства в галузі геометрії розширювалися й удосконалювалися, але не вгасав науковий і практичний інтерес до найпростіших геометричних фігур, зокрема до трикутника – плоскої фігури, утвореної з'єднанням трьох точок прямими лініями. Усім відомі рівносторонні, рівнобедрені, тупо- і гострокутні трикутники, прямокутні трикутники, що широко використовуються для рішення простих задач повсякденного життя (побудови інших плоских і просторових фігур, обчислень площ, об’ємів і т.д.). Менш відомі деякі інші види трикутників, наприклад [2, 3]:
педальний трикутник (щодо даного трикутника АВС) – трикутник, вершини якого є основами перпендикулярів, опущених з довільної точки Р, що знаходиться у середині трикутника АВС на сторони трикутника АВС;
ортоцентральний трикутник – окремий випадок педального трикутника, при якому довільна точка Р є точкою перетину висот трикутника АВС;
серединний трикутник (щодо трикутника АВС) – трикутник, побудований шляхом з'єднання середин сторін даного трикутника АВС;
різницевий трикутник – трикутник, довжини сторін якого складають арифметичну прогресію;
бісектральний трикутник – трикутник, вершинами якого є точки перетину бісектрис даного трикутника АВС із протилежними сторонами.
З розвитком науки про трикутники в побут учених (та й не тільки їх) увійшли характерні назви деяких точок і ліній трикутника:
чевіана – відрізок, що з'єднує вершину трикутника з деякою точкою на протилежній стороні;
висота – чевіана, опущена під прямим кутом на протилежну сторону трикутника;
бісектриса – чевіана, що поділяє навпіл кут при даній вершині, з якої вона опущена;
медіана – чевіана, що з'єднує вершину трикутника із серединою протилежної сторони;
центр кола, описаного навколо трикутника, - точка перетину трьох перпендикулярів, що поділяють навпіл сторони трикутника;
центр кола, вписаного в трикутник, - точка перетину бісектрис трикутника;
ортоцентр трикутника АВС – центр кола, вписаного в ортоцен-тричний трикутник відносно трикутника АВС;
центроїд – точка, що поділяє відстань від ортоцентра до центра описаного навколо трикутника кола у відношенні 2:1;
пряма Ейлера – пряма, що з'єднує ортоцентр, центроїд і центр описаного навколо трикутника кола;
коло дев'яти точок (коло Ейлера) – коло, на якому лежали основи трьох висот довільного трикутника, середини трьох його сторін і середини трьох відрізків, що з'єднують його вершини з ортоцентром.
Потреба в дослідженні характерних точок і ліній трикутників виникла як з наукової цікавості, так і з чисто практичними цілями. І якщо в стародавності найбільш широко використовувався на практиці прямокутний трикутник Піфагора (різницевий трикутник зі спів-відношенням сторін 3:4:5), то в наш час найбільший інтерес викликають незвичайні властивості так званого трикутника Рьоло.
1. Кінематична властивість трикутника Рьоло
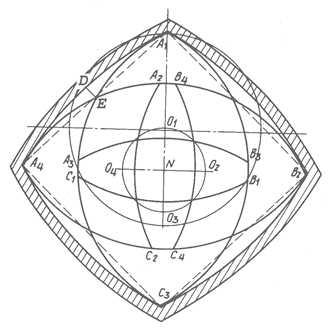 |
Цей криволінійний трикутник А1В1С1 (див. рис.1) названий на честь німецького математика та інженера Франца Рьоло, який найбільш повно вивчив його властивості.
Рис.1. Схема окреслення чотирикутника обертанням трикутника Рьоло
Побудувати трикутник Рьоло досить просто. З кожної вершини рівностороннього трикутника слід провести дугу кола, що з'єднує дві інші вершини. Отриманий криволінійний трикутник відноситься (поряд з колом) до так званих кривих постійної ширини: коли він котиться, верхні і нижні точки контуру переміщуються вздовж паралельних прямих.
Окреслення чотирикутника складеним обертанням трикутника Рьоло
Але найбільш відома кінематична властивість трикутника Рьоло. Якщо обертати трикутник А1В1С1 навколо центра О1 описаного навколо нього кола з радіусом О1А1, а центр трикутника О1 обертати в протилежну сторону в три рази швидше по колу з центром N, то трикутник окреслить фігуру, що незначно відрізняється за формою від чотирикутника (рис.1). Зокрема, за один оберт центра О1 направо по колу з радіусом О1N два кути чотирикутника будуть оформлені вершиною А трикутника Рьоло і по одному – вершинами В і С, тобто через кожну чверть оберту навколо центру N трикутник Рьоло буде знаходитися в положеннях А2В2С2, А3В3С3 і А4В4С4.
Однак виконані на рис.1 побудови показують невелику кривину сторін чотирикутника, про яку також вказують інженери-експери-ментатори [4, 5]. За їхніми даними, найбільше відхилення сторони чотирикутника А1А4 від ідеальної прямої має місце в точці D, для якої справедлива рівність А1D = А4D. Трикутник Рьоло при обертанні контак-тує з точкою D серединою своєї сторони.
З’ясуємо, як обчислити це відхилення. Позначимо: R – радіус описаного біля трикутника Рьоло кола; r = O1N. Тоді
А1В1=А2В2=А3В3=А4В4=
R![]() ,
,
ND= r – R + R![]() (1)
(1)
З трикутника А1NA4 одержуємо
А1N = r + R
NE = ![]() (r +
R) / 2 (2)
(r +
R) / 2 (2)
З урахуванням, що DE = ND = NE, з рівнянь (1) і (2) визначимо
DE = r + R(![]() - 1) – (r + R) /
- 1) – (r + R) /![]() ,
,
або
DE = R(![]() – 1
– (
– 1
– (![]() )/2) +
r(1 – (
)/2) +
r(1 – (![]() )/2)
~ 0,025R + 0,293r (3)
)/2)
~ 0,025R + 0,293r (3)
Таким чином, відхилення DE сторони квадрата від ідеальної прямої залежить, у першу чергу від радіуса r і не може бути усуненим, тому що R і r не можуть дорівнюватися нулю.
Окреслення n-кутника складеним обертанням m-кутника Рьоло
Ґрунтуючись на отриманих Францем Рьоло результатах, розглянемо більш загальну задачу обертання m-кутника Рьоло з різними швидкостями навколо центрів обертання для окреслення замкнутої фігури у формі n-кутника (n>m).
Розглянемо кінематику утворення трикутником Рьоло кутів А1В2С3 і А4А1В2. Для того, щоб кут А1В2С3 був утворений вершиною В трикутника Рьоло, необхідно за час t перемістити трикутник по годинниковій стрілці на кут 2π/n навколо центра N, але при цьому прокрутити його проти годинникової стрілки на кут (2π/n) – (2π/m). Визначимо кутові швидкості обертання трикутника Рьоло:
α = (2π/nt) – (2π/mt) = 2π(m – n) / (tmn),
β = 2π/nt,
де α – кутова швидкість обертання трикутника Рьоло навколо центра О1 описаного біля нього кола;
β – кутова швидкість обертання центра О1 навколо центра N.
Установимо, чому дорівнює співвідношення швидкостей:
α / β = 1 – (n / m). (4)
Таким чином, у результаті аналізу утворення чотирикутника за допомогою трикутника Рьоло встановлено, що цей процес є окремим випадком утворення n-кутника в результаті складеного обертання m-кутника. Співвідношення (4) показує, що n-кутник може бути окресленим, якщо на процес обертання центра О1 m-кутника навколо центра N накласти обертання в протилежну сторону m-кутника навколо його центра О1 з кутовою швидкістю α, що відрізняється в n/m раз від кутової швидкості β.
Формула (4) також показує:
1) оскільки n > m, то кутові швидкості α і β завжди будуть протилежні за знаком;
2) трикутник Рьоло при обертанні з різними швидкостями α і β може окреслювати будь-який правильний n-кутник (n > m), наприклад, шестикутник, якщо α = - β, дев’ятикутник, якщо α = -2 β і т.д.;
3) можна замість трикутника Рьоло використовувати інші фігури з m-ним числом кутів;
4) з практичною метою, на наш погляд, замість трикутника Рьоло можна застосовувати сочевицеподібний контур (m=2); інструменти і деталі, що мають цей контур, простіші у виготовленні, менші за габаритами, і, як наслідок, дешевші.
Розрахунок контурів n-кутників, що окреслені трикутником Рьоло
Науковий і практичний інтерес викликає не тільки необхідність обчислювання відхилення DE, але й встановлення координат контурів n-кутників, що окреслені m-кутниками на зразок трикутника Рьоло.
Спочатку визначимо координати будь-якої точки контуру трикутника Рьоло при сталих α і β.
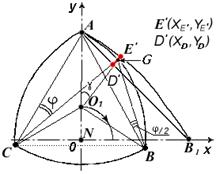
Рис.2. Схема для визначення координат контуру трикутника Рьоло.
Задамо кутом γ точку G на контурі трикутника Рьоло (при подальшому оберті трикутника Рьоло точка G переходить у точку Е контуру чотирикутника). Позначимо центральний ∟ACG=φ. Тоді ∟ABG=φ/2. Хай OG=Rγ. Визначимо Rγ. З трикутників АСЕ’ та АОЕ’:
АЕ’2=6R2-6R2cosφ,
АЕ’2=R2+ Rγ2-2Rrγcosγ,
звідки
cosφ=(5R2+2RRγcosγ- Rγ2)/6R2
З трикутника Е’СВ за теоремою косинусів:
![]()
За теоремою синусів з трикутника ОВЕ’ маємо:
Rγ=(BE’ sin(30o+φ/2))/ sin(120o-γ),
звідки
![]()
Нехай трикутник АВС обертається навколо центру О з кутовою швидкістю α. У системі координат, що зв’язана з центром О, визначимо координати точки G:
XG=Rγsin(γ-α)
YG=Rγcos(γ-α)
Якщо центр О обертається навколо центру N з кутовою швидкістю β, то точка G переміщується у точку Е’ і у системі координат, що зв’язана з центром N, набуває координати, які можна обчислити за формулами:
XG=rcosβ+ Rγsin(γ-α) (5)
YG=rsinβ+ Rγcos(γ-α). (6)
Визначимо в загальному вигляді відхилення D’E’ (див рис.3).
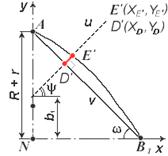
Рис.3 Схема для визначення відхилення D’E’.
Рівняння прямої v, тобто сторони AB1 n-кутника, до якої належить точка D’, має вигляд:
Y=kX+(R+r). (7)
Як відомо, коефіцієнт k=tg(ω), де ω – кут між прямою v та віссю х. В нашому випадку для окреслення чотирикутника ω=45о, а для n-кутника – ω=180о/n.
Визначимо рівняння прямої u, часткою якої є відхилення D’E’:
Y=k1X+b1, (8)
k1=tg(ψ)=tg(ω+90o)=-ctg(ω)=-1/k.
Координати точки Е’ дозволяють обчислити b1:
b1=YE’-kXE’.
Рівняння (7) та (8) утворюють систему, рішенням якої є координати точки D’:
XD=(kYE’+ XE’+k(R+r))/(k2+1),
YD=(k2YE’+kXE’+k(R+r))/(k2+1).
Таким чином за відомими координатами точок D’ і E’ можемо обчислити відхилення D’E’ за формулою:
![]()
Окреслення правильного чотирикутника
складеним обертанням трикутника Рьоло
Францем Рьоло
вказувалося, що при окресленні трикутником Рьоло чотирикутника утвориться невелика
неперекрита трикутником площа чотирикутника. У даній роботі цей висновок був
сформульований у вигляді формули (3). Я взяв собі за мету: що потрібно зробити
для усунення кривини сторін чотирикутника. Один з варіантів передбачає (рис.4)
утворення чотирикутника таким трикутником Рьоло, що має радіус кривини ρ ≠
R. Оскільки на рис.1 чотирикутник має опуклі сторони, вважаємо, що радіус
кривини сторін трикутника Рьоло, що дорівнює, ![]() недостатній для забезпечення
паралельності сторін чотирикутника. З цього випливає ρ >
недостатній для забезпечення
паралельності сторін чотирикутника. З цього випливає ρ > ![]() .
.
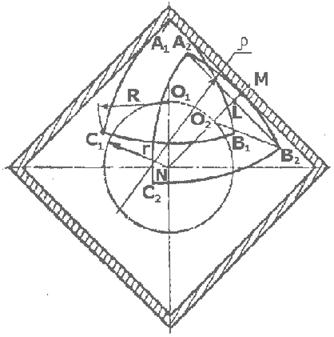
Рис.4. Схема окреслення правильного чотирикутника обертанням трикутника Рьоло із зміненим радіусом кривини сторін
Для сегмента А2LB2M запишемо:
ρ = [(LA2)2 + LM2] / 2LM. (9)
З трикутника O2B2L визначимо LA2:
LA2 = (![]() ) /
2 (10)
) /
2 (10)
Висота сегмента LM є частиною катета прямокутного трикутника A1NM:
LM = NM – NL,
для якого
NM = A1N·cos45º, тобто NM = ![]() (r + R) / 2 (11)
(r + R) / 2 (11)
і
NL = NO2 + O2L
Враховуючи, що NO2 = r, а з трикутника O2B2L O2L = R / 2, одержимо:
NL = r + R/2 (12)
Таким чином, з урахуванням формул (11), (12)
LM = r[(![]() )/2
– 1] + R(
)/2
– 1] + R(![]() - 1)/2 (13)
- 1)/2 (13)
Підставляючи вирази (10) і (11) у формулу (9), визначимо необхідний радіус кривини:
ρ=[3R2+(R2+2Rr+2r2)(3-2![]() ) + 2Rr(1-
) + 2Rr(1-![]() )] / {4[R(
)] / {4[R(![]() –1) + r(
–1) + r(![]() –2)]} (14)
–2)]} (14)
Знаменник формули (14) буде позитивною величиною при виконанні нерівності:
R > [r(2 - ![]() )] / (
)] / (![]() –
1)
–
1)
Окреслення правильного чотирикутника складеним обертанням сочевицеподібного контуру
Для визначення оптимальних співвідношень параметрів, що забезпечують точну геометричну форму чотирикутника, окресленого обертанням сочевицеподібного контуру, звернемося до рис.5.
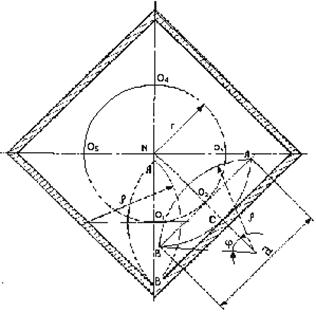
Рис.5. Схема окреслення чотирикутника обертанням сочевицеподібного контура
З прямокутного трикутника NCB з урахуванням позначення NO2 = r співвідношення між висотою O2C і шириною a сочевиці дорівнює:
(r + a/2)cos π/n = r + O2C (15)
Для сочевиці АВ справедливі рівності:
a/2ρ = sin φ,
O2C = ρ (1 – cos φ),
звідки
a2 / 4ρ2 = 1 – cos2 φ,
![]()
підставляючи значення О2С в формулу (15), одержимо:
ρ={a·cos(π/n)–2r[1–cos(π/n)]}/4 + a2/ {4a·cos(π/n) – 8r[1 -cos(π/n)]},
де a – ширина сочевиці, при цьому a ≤ 2ρ cos (π/n).
Практичне застосування трикутника Рьоло
Властивості трикутника Рьоло, які виявив Франц Рьоло, а потім і інші учені, широко використовуються у всіляких областях техніки. На відміну від математиків інженери і техніки надали трикутнику Рьоло власну назву – “рівновісний контур” чи скорочено - РК.
Окреслення чотирикутника при обертанні РК було використано в конструкціях натирача підлоги (для ефективного миття і натирання підлог у кутах кімнат), ущільнювача бетонних сумішей при виготовленні квадратних бетонних стійок. Виготовлено інструменти для свердління і фрезерування квадратних отворів. РК використовують у кулачках грейферних механізмів кіноапаратів, насосах, редукторах, роторно-поршневих двигунах. Наприклад, у вигляді РК виконаний ротор двигуна Ванкеля [4, 6].
Кулачок у вигляді РК-контура, якщо його закріпити з ексцентриситетом, при обертанні може створювати вібрації. Враховуючи незалежність діаметра від кута повороту в ряді кулачків, що обертаються, можна забезпечити і їхнє щільне прилягання, і сталий зазор між ними. Значна робоча поверхня кулачків, що обертаються, дозволяє ефективно виконувати захват і розмел різних матеріалів [6].
Найбільш повно розглянуту нами вище кінематичну властивість РК застосували в технологіях [5] і пристроях (авт. свід. 1375383, 1426676, 1516191) для виготовлення розтрубів на кінцях циліндричних труб. В результаті були удосконалені токарські верстати і пристосування до них, що забезпечили якісну роздачу квадратних і шестигранних розтрубів, необхідних для з'єднання труб різної конфігурації в розтині. Процеси роздачі використовували інструменти з РК-контуром, різні співвідношення кутових швидкостей інструмента, труб і приводів інструмента для роздачі.
У промисловості і сільському господарстві успішно працюють пристрої і деталі, що використовують деякі інші властивості рівновісного контуру, не зв'язані з його обертанням. Ці властивості встановлені поки тільки експериментально і вимагають теоретичного обґрунтування.
Для передачі крутильного моменту з вала на шестірню використовують головним чином шліцові чи шпонкові з”єднання. Коли форму розтину валів і отворів насаджених на них шестерень виготовили у вигляді РК, то встановили, що:
1) для передачі того ж самого крутильного моменту площа їхнього поперечного розтину може бути зменшена на 30%;
2) знос таких з'єднань у 3 рази менше;
3) крутильна жорсткість – у 3 рази вище;
4) вал і шестірня автоматично центруються, що зменшує вібрацію і шум.
З'єднання вал-шестірня з РК у розтині широко застосовують на автомобільних, тракторних, комбайнових і верстатобудівних заводах.
Здатність деталей із РК у розтині до самоцентрування при контакті з іншими деталями, ефективній передачі зусиль і меншого зносу використана в конструкції інструмента для гвинтового прошивання труб (авт. свід. 1279690), що використовувався в трубопрокатному цеху ММК ім. Ілліча.
Для виготовлення труби треба було спочатку виготовити порожню заготівку з круглого зливку металу. Отвір у зливку роблять за допомогою інструмента, що має форму подовженої бочки з передньою частиною особливої форми – носком. Носок виготовляли у вигляді закругленого попереду конуса, на поверхні якого робили подовжні пази (з розтином у вигляді шліца). Проте носок сильно зношувався, а одержувана порожня заготівка риса нерівномірну товщину стінок.
І лише коли носок виготовили з розтином у вигляді рівновісного контуру, стійкість інструмента зросла, інструмент при прошиванні не зміщався убік від центра зливка, а порожні заготівки стали мати більш рівномірну товщину стінок.
Якщо корпус плавучої бурової установки виконати в плані у вигляді РК-контура, він завжди само орієнтується одним з своїх кутів назустріч течії [6].
При вирубці отворів у металевих аркушах використовують інструмент: матриці і вирубні пуансони зі спеціальними формами крайок, що ріжуть, наприклад, навкруги, еліпсом, чи прямокутником трикутником. Якщо в пуансоні крайку, що ріже, виконати рівновісним контуром, то знижується зусилля деформування, зменшуються відходи металу і створюється більш якісна поверхня [14, авт.свід. 376186].
Трикутник Рьоло – фігура сталої кривини, тобто нормаль між двома паралельними і дотичними прямими до РК-контура є сталою величиною. Але трикутник Рьоло при однакових з кругом того ж діаметру площах має більшу ширину у довільно вибраному напрямі, що дозволяє використовувати РК-контур в якості поперечного розтину паль для слабких ґрунтів [6].
Варто також згадати і про поки що фантастичні можливості використання РК для виготовлення …коліс. Удосконалювання форми цього великого винаходу людства відбувається і в теперішній час [8]. Інженери установили, що на твердих дорогах колеса автомобілів повинні бути круглими, при русі по пухкому снігу чи піску – квадратними, їхати по болоту найкраще на пелюсткових колесах. Але всі ці форми коліс можна замінити на колесо у формі трикутника Рьоло. Треба лише привод в автомобілях зробити таким, як у винаходах, що використовуються при ротаційній роздачі розтрубів на трубах. Тоді по твердому ґрунті автомобіль буде плавно їхати при співвідношенні кутових швидкостей β=-3α, а по інших ґрунтах, змінюючи співвідношення α і β, можна реалізовувати рух автомобіля, наприклад, як в ожеледь, з накинутими на шини ланцюгами чи так, як переміщується павук (β=0).
Такі універсальні колеса були б корисними місячному всюдиходові, болотоходам, тягачам, що працюють в умовах вічної мерзлоти і т.д.
Висновки
1. Вивчено трикутник Рьоло (рівновісний контур) і його складене обертання біля двох центрів. Теоретично розраховані кутові швидкості обертання α, β трикутника Рьоло коло центра описаного навколо нього кола (α) і іншого довільно обраного центра (β), що дозволяють трикутнику окреслювати фігури, близькі за формою до правильних багатокутників. Визначено погрішності розмірів багатокутників, що окреслюються.
2. На підставі виведеної залежності між швидкостями α, β, числом граней трикутника Рьоло і багатокутника, що окреслюється, показана можливість окреслення будь-яких правильних n-кутників шляхом обер-тання зі швидкостями α і β будь-якого m-кутника за умови n > m > 2.
3. Запропоновано з практичною метою замість трикутника Рьоло використовувати сочевицеподібний контур (m = 2). Інструменти та деталі, що риси б контур сочевиці, простіше було б виготовити, тому що вони б риси меншу вагу, дві замість трьох криволінійних поверхонь, що обробляються, і, як наслідок, були б дешевші.
4. Отримані формули, які дозволяють обчислити координати довільно обраної точки контуру трикутника Рьоло в процесі його складеного обертання навколо двох центрів з окресленням контурів будь-яких n-кутників (n > 3).
5. Теоретичним шляхом отримані формули, що визначають необхідні радіуси кривини сторін трикутника Рьоло (m=3) і соче-вицеподібного контура (m=2), які забезпечують прямолінійність сторін багатокутників, що окреслюються.
6. Надані приклади практичного використання трикутника Рьоло, заснованого на його властивості окреслювати правильні багатокутники при складеному обертанні, а також ефективно передавати моменти, що крутять, і самоцентруватися при контактах декількох деталей.
Список литературы
1. А. Г. Конфорович. Визначні математичні задачі. – Київ, Радянська школа, 1981. – 189с.
2. І. А. Кушнір. Трикутник у задачах. – Київ, Либідь, 1994.- 104с.
3. Г. С. М. Коксетер, С. Л. Грейтцер. Нові зустрічі з геометрією. – М., Наука, 1978. – 223с.
4. Техніка і наука, 1982, №7, с.14-15.
5. Суднобудівна промисловість, 1990, вип.13, с.46-50.
6. Правила гри без правил. / Скл. А. Б. Селюцький .- Петрозаводськ,
Карелія, 1989.-280с
7. Д. А. Вайнтрауб, Ю. М. Клепіков. Холодне штампування в дрібносерійному виробництві. Довідковий посібник. – М., Машино-будування, 1975.- 240с.
8. Техніка і наука, 1983, №10, с.19-21.
9. АНІЩЕНКО СЕРГІЙ ОЛЕКСАНДРОВИЧ. Трикутник Рьоло (Треугольник РЁЛО)