Дипломная работа: Система навигации мобильного робота
ПЕРЕЧЕНЬ УСЛОВНЫХ ОБОЗНАЧЕНИЙ, ЕДИНИЦ СОКРАЩЕНИЙ И ТЕРМИНОВ
GPS – глобальная система позиционирования (Global Positioning System)
ИМР – интеллектуальный мобильный робот
МР – мобильный робот
МРИЧС – мобильный робот для использования в чрезвычайных ситуациях
ПК – персональный компьютер
САПР – система автоматизированого проектирования
СП – сенсорная подсистема
СУ – система управления
ЧПУ – числовое программное управление
ЭВМ – электронно- вычислительная машина
ВВЕДЕНИЕ
Роботы – автоматические системы, предназначенные для воспроизведения двигательных и интеллектуальных функций человека. От традиционных автоматов отличаются большей универсальностью и способностью адаптации на выполнение различных задач, в том числе в изменяющейся обстановке.
В настоящее время робототехника превратилась в развитую отрасль промышленности: тысячи роботов работают на различных предприятиях мира, подводные манипуляторы стали непременной принадлежностью подводных исследовательских и спасательных аппаратов, изучение космоса опирается на широкое использование роботов с различным уровнем интеллекта. Особенное внимание уделяется автоматизации тяжелых, вредных, утомительных и монотонных работ в различных отраслях с помощью роботов-манипуляторов.
Однако сегодня у специалистов в области робототехники возникают примерно те же трудности, что и 30 лет назад у разработчиков ЭВМ. Из-за отсутствия общих стандартов и платформ создателям роботов приходится начинать разработку каждого нового творения практически с нуля.
Все же, несмотря на все сложности, те, кто занят в сфере робототехники, от профессоров до предпринимателей и студентов, полны энтузиазма, напоминающего о поре создания Microsoft, когда создатели искали пути развития новых технологий и мечтали, чтобы компьютеры были доступны каждому. И сегодня, анализируя тенденции развития робототехники, можно представить будущее, где роботы станут незаменимыми помощниками людей в их повседневной жизни. Возможно, человечество находится на пороге новой эры, когда персональные компьютеры сойдут со столов и позволят нам видеть, слышать, осязать и, возможно даже, манипулировать предметами на расстоянии.
Сейчас разработчики систем с использованием искусственного интеллекта могут оснастить свои творения системой навигации GPS, видеокамерами и множеством дополнительных детекторов, в результате чего возможности современных роботов увеличиваются.
Связь домашних роботов и персональных компьютеров облегчит жизнь человеку (Приложение А). Например, офисный служащий следит за охраной своего дома, уборкой, раскладыванием выстиранного белья, контролируя работу домашних роботов на экране своего ПК. Кроме того, роботы смогут обмениваться информацией между собой и домашним компьютером [1].
Целью данной работы является определение задач и разработка структурной схемы системы навигации мобильного робота.
Для успешной навигации в пространстве система робота должна уметь строить маршрут, управлять параметрами движения (задавать угол поворота колес и скорость их вращения), правильно интерпретировать сведения об окружающем мире, получаемые от датчиков, и постоянно отслеживать собственные координаты.
Компьютерные системы построения маршрута разработаны достаточно хорошо. Первоначально они создавались для простейших виртуальных сред, и программа, моделирующая действия робота, быстро находила оптимальный путь к цели в двумерных лабиринтах и комнатах, наполненных простыми препятствиями. Когда появились быстрые процессоры, стало возможным формировать траекторию движения уже на сложных трехмерных картах, причем в реальном времени [2].
1 АНАЛИЗ ТРЕБОВАНИЙ ТЕХНИЧЕСКОГО ЗАДАНИЯ
Современная робототехника возникла в 60-е - 70-е годы прошлого столетия как ответ на запросы комплексной автоматизации, когда в результате соединения управляемых человеком манипуляторов с системами ЧПУ станков и другого технологического оборудования появились автоматические машины принципиально нового типа. Это были роботы с программным управлением - роботы первого поколения.
Успехи применения первых роботов вызвали быстрый рост потребностей в них и соответственно требований к их возможностям. Стали развиваться роботы с комбинированным управлением, в которых программное управление дополняется управлением от человека-оператора - роботы промежуточного 1,5-го поколения с супервизорным, а затем интерактивным управлением.
В те годы только первые шаги начала делать теория адаптивного управления. И одними из первых машин с таким управлением стали адаптивные роботы. Это роботы второго поколения, оснащенные сенсорикой.
По мере развития систем адаптивного управления в них стали применяться методы искусственного интеллекта. Когда эти технологии заняли определяющее положение в алгоритмическом обеспечении систем управления, сформировалось новое, третье поколение роботов - интеллектуальные роботы [3].
Целью данной работы является разработка структурной схемы системы навигации мобильного робота.
Для реализации поставленной задачи необходимо:
а) провести анализ различных видов навигации;
б) составить карту местности;
в) произвести коррекцию траектории движения робота;
г) спланировать оптимальный маршрут движения, ведущего к цели;
д) реализовать управление локальными перемещениями по выработанному маршруту;
е) реализовать обход дополнительно выявляемых в ходе движения препятствий и опасных мест.
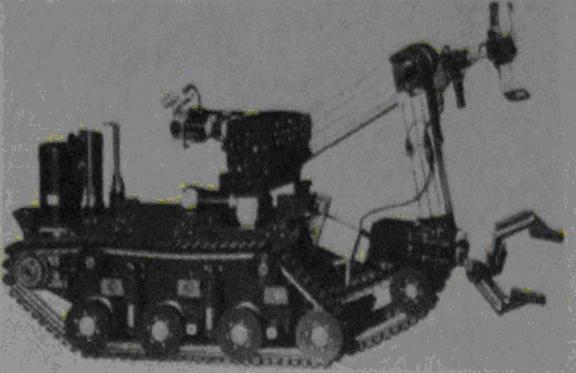
В качестве мобильного робота в данной работе берется мобильный робот для использования в чрезвычайных ситуациях (МРИЧС), общий вид которого представлен в приложении Б.
Назначение робота – инспекция территорий, зараженных химическими веществами или находящихся под угрозой заражения, работа в условиях сильной задымленности во время тушения пожара, самостоятельное патрулирование назначенных территорий, взятие проб, передача телеметрической и визуальной информации о состоянии объекта.
Система управления робота и программное обеспечение имеют модульную структуру, допускают модернизацию и расширение в части доработок, обеспечение помехоустойчивости, тестирования повышения надежности, самодиагностики, а также выполнения дополнительных функций и улучшения других тактико-технических характеристик.
Управление роботом осуществляется автономной СУ (бортовым компьютером) или по радио с помощью телерадиомодуля или по кабелю. СУ объединена с подсистемами датчиков, управления и связи [4].
навигация робот искусственный интеллект
2 АНАЛИЗ ПРЕДМЕТНОЙ ОБЛАСТИ ПРОЕКТИРОВАНИЯ СИСТЕМЫ НАВИГАЦИИ
Робототехника - область науки и техники, ориентированная на создание роботов и робототехнических систем, предназначенных для автоматизации сложных технологических процессов и операций, в том числе, выполняемых в неопределённых условиях, для замены человека при выполнении тяжелых, утомительных и опасных работ.
Далеко не всегда условия окружающей среды позволяют человеку выполнять то или иное действие непосредственно. Это может быть работа со взрывоопасными материалами, отравляющими веществами, пожаротушение и многие другие задачи. В таких ситуациях на помощь человеку приходят мобильные роботы для использования в чрезвычайных ситуациях.
МР имеет ряд сенсоров для восприятия окружающей его среды, ряд исполнительных устройств (эффекторов) для воздействия на среду и систему управления, которая позволяет роботу совершать целенаправленные и полезные действия (рисунок 2.1).
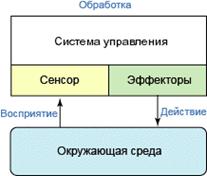
Рисунок 2.1 – Базовые элементы всех роботизированных систем
МРИЧС использует дистанционные датчики, датчики температуры, датчики химических веществ, датчики радиации и др. для восприятия окружающей его среды, а также двигательные устройства в качестве эффекторов для воздействия на среду.
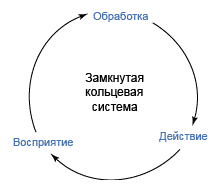
Рисунок 2.2 – Замкнутая кольцевая система во взаимодействии с окружающей средой
В замкнутой кольцевой системе сенсоры возбуждают систему управления, в зависимости от изменений в окружающей среде (рис. 2.2). В другом случае действует так называемая обратная связь. Если система управления определяет действие, которое изменяет среду, сенсоры подтверждают данное изменение, отправляя информацию о новом состоянии окружающей среды в систему управления [5].
Применение МРИЧС позволяет исключить угрозу здоровью и жизни человека-оператора. Таким образом, актуальной является проблема создания мобильных роботов, обладающих способностями к самостоятельному передвижению и автоматическому выполнению поставленных задач. Важную роль при этом играет создание системы навигации, позволяющей составлять карту среды, в которой функционирует МР, планировать маршрут, ведущий к цели и обход препятствий, встречающихся на пути.
В настоящее время в большинстве случаев управление роботом осуществляет человек-оператор на уровне движений, при этом от человека требуется непрерывное наблюдение за роботом и оперативное управление его действиями. Такой подход определяется неспособностью робота принимать самостоятельные решения и имеет ряд недостатков. К ним можно отнести необходимость организации и постоянной поддержки канала связи с человеком-оператором (кабельная связь или радиосвязь), что существенно ограничивает область применения робота.
При выполнении технологических операций оператор, получая от системы технического зрения информацию об объекте и процессе выполняемых работ, непрерывно осуществляет ручное управление исполнительными механизмами манипулятора и транспортного средства. Сложный процесс управления в сочетании с характером выполняемых работ, требующих повышенного внимания и осторожности, приводит к быстрой утомляемости оператора и, как следствие, увеличению вероятности ошибочных действий. Кроме того, человек не всегда может правильно оценить обстановку по данным телеметрии и осуществить адекватное управление. Указанных недостатков можно избежать, если управление со стороны человека-оператора будет проводиться не на уровне задания отдельных движений, а на уровне постановки цели. В этом случае робот должен самостоятельно (или при минимальном участии человека) выполнять поставленные задачи [6].
Лет десять тому назад казалось, что решить вопросы навигации роботов будет несложно. Представлялось, что достаточно распознать изображение, опознать заданные объекты, измерить до них расстояние - и задача решена.
Первые системы обеспечения навигации роботов создавались на основе сканирующих датчиков, в том числе телевидения, локационных и стереодальномеров. Специальная вычислительная схема робота в конечном итоге сводила электрические сигналы к аналогам различных препятствий и делала вывод о целесообразности того или иного движения. Стандартными признаками препятствий, воспринимаемых роботом, стали стена, навес, яма - обрыв, наклон, опасность для дальномера и другие упрощенные или укрупненные детали сцены.
Обычно задачу технического зрения робота при навигации разбивают на три уровня, соответствующих дальней, средней и ближней навигации (рисунок 2.3).
Система дальней навигации предназначена для планирования основного маршрута движения робота. Главной функцией машинного зрения при этом является распознавание ориентиров. Оптико-электронная схема, обеспечивающая решение данной задачи, состоит из объектива с переменным фокусным расстоянием (трансфокатора), электронного блока, управляющего камерой, механизма, реализующего наклон или поворот камеры, а также системы распознавания ориентира. Входные сигналы определяются грубой картой видимости, визуальными моделями ориентиров, картой местности и описанием задачи. Представления о внешней среде базируются на карте областей видимости (проходимости робота), местоположении робота, последовательности расположения областей, через которые проходит маршрут движения.
Система промежуточной (средней) навигации содержит карту, которая является подмножеством карты системы дальней навигации с более подробным содержанием. Задача навигации состоит в обеспечении движения в пределах однородной видимости, т. е. робот проходит коридоры свободного пространства (прямой полосы местности, где не требуется маневрирования). Система промежуточной навигации предполагает чередование таких коридоров и их последовательную корректировку путем увеличения ширины и разбиения маршрута на более мелкие участки. Входные сигналы этой системы основаны на карте дальней навигации, моделях известных препятствий и явных ориентиров местности, маршруте, спланированном на базе системы дальней навигации. Система промежуточной навигации обеспечивает общий анализ изображений для последующей сегментации и распознавания, качественное определение расстояний, накопление ориентиров и планирование маршрута. Представление о внешнем мире даст карта коридоров свободного пространства, на которой отмечены основные характерные признаки препятствий и местности.
Система ближней навигации предназначена для непосредственного измерения расстояний в сочетании с многоаспектным определением подпространства промежуточной безопасной зоны, в пределах которой перемещается робот, а также анализа структуры местности. Входными данными служат информация, поступающая от модулей счисления пройденного пути и курса, сведения о свободном пространстве. Система должна измерять расстояния, оценивать структуру местности, определять безопасный обход препятствий и планировать прохождение по определенным трассам.
Отдельной задачей системы ближней навигации является следование по дорогам. В ее состав входят планирование последовательности ощущаемых изменений дороги, преодоление пересеченных и искривленных участков, крутых спусков и подъемов дороги, а также, обеспечение навигации при наличии другого робота. Таким образом, эта задача, являясь частной для всей навигации робота, была связана с первыми этапами разработки навигационных систем роботов.
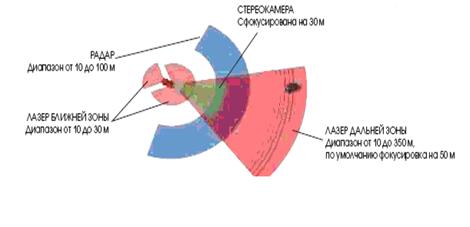
Рисунок 2.3 – Зоны навигации
Основной процесс управления при навигации робота состоит в передаче задач от уровней с большей степенью абстракции к уровням с меньшей ее степенью, а информация о состоянии робота проходит в обратном направлении. При этом каждый уровень навигации хранит карту своей рабочей зоны робота и имеет специальные видеодатчики с соответствующими визуальными возможностями [7].
3 ВЫБОР И ОБОСНОВАНИЕ МОДЕЛИ ПРЕДСТАВЛЕНИЯ ЗНАНИЙ В НАВИГАЦИОННОЙ СИСТЕМЕ
3.1 Обзор аналогичных конструкций
Навигация мобильного робота охватывает большой диапазон различных технологий и применений. Она опирается как на очень старые технологии, так и на самые продвинутые достижения науки и техники [8].
Робототехники выделяют три навигационные системы:
а) глобальная - определение абсолютных координат устройства при движении по длинным маршрутам;
б) локальная - определение координат устройства по отношению к некоторой (обычно стартовой) точке. Эта схема востребована разработчиками тактических беспилотных самолетов и наземных роботов, выполняющих миссии в пределах заранее известной области;
в) персональная - позиционирование роботом частей своего тела и взаимодействие с близлежащими предметами, что актуально для устройств, снабженных манипуляторами.
Считается, что чем крупнее аппарат, тем выше для него важность глобальной навигации и ниже - персональной. У роботов-малышей все наоборот.
Системы навигации классифицируются еще по одному признаку - они могут быть пассивными и активными. Пассивная система навигации подразумевает прием информации о собственных координатах и других характеристиках своего движения от внешних источников, а активная рассчитана на определение местоположения только своими силами. Как правило, все глобальные схемы навигации пассивные, локальные бывают и теми и другими, а персональные схемы - всегда активные.
Первые модели промышленных роботов с более или менее автономной навигацией, созданные в 60-е годы, передвигались по маршруту, жестко заданному с помощью электрических кабелей, проложенных под полом заводских сооружений. На роботах устанавливались несложные устройства приема электромагнитного излучения кабеля, позволявшие определять направление перемещения. Аппараты могли двигаться по различным маршрутам благодаря тому, что по нескольким кабелям передавался сигнал с разной частотой. Но такая схема была дорогой и негибкой.
С появлением первых систем машинного зрения удалось отказаться от кабелей и перейти к навигации по ярко нарисованным (или флуоресцентным) линиям на полу. Робот с помощью камеры следил за такой линией и самостоятельно двигался вдоль нее. Правда, линии часто стирались, нередко загораживались другими аппаратами и людьми, а на перекрестках, где сходилось несколько маршрутных линий, роботы обычно терялись и останавливались, не в силах понять, куда же двигаться дальше.
Испытывались и другие похожие концепции. По маршруту движения на определенной высоте размещались предметы-маркеры заданной формы, которые робот с помощью простых датчиков "ощупывал", узнавая тем самым свое местонахождение. Но такая схема навигации основана на нежелательном физически активном контакте машины с окружающим миром, что может привести к разрушительным последствиям. Кроме того, роботы не всегда могли правильно идентифицировать маркеры, а расположение последних приходилось выбирать очень точно.
Постепенно модели маркерной навигации были оснащены более совершенными аналоговыми датчиками, научившимися измерять силу реакции контакта и определять форму маркера, а сейчас в этих целях применяются цифровые матричные датчики, способные получать от маркеров подробные данные об окружающей среде.
Следующий способ навигации – это использование лазерных дальномеров и ультразвуковых генераторов (сонаров). Однако лазерный луч поможет получить образ среды только в зоне прямой видимости. Кроме того, на пути луча часто возникают мелкие помехи, вносящие погрешность в такой образ. А ультразвуковые датчики характеризуются большим временем отклика (если робот находится на большом и открытом пространстве), порядка десятых долей секунды, что не позволяет роботу перемещаться быстро. Скорость звука в разных условиях также может "плавать", влияя на точность оценки расстояния, в результате в "голове" робота искажается общая картина окружающей среды. Создание трехмерных карт с помощью лазеров в масштабе реального времени еще более затруднительно и, как минимум, требует существенных вычислительных мощностей, которые пока не удается воплотить в виде компактных бортовых плат. По этим причинам ценность информации, поступающей от бортовых датчиков, невелика. Роботу необходимо перевести ее в формальное и структурированное "словесное" описание мира (задача распознавания) [2].
Одним из способов организации движения робота в заранее не определённой среде может быть использование алгоритмов системы управления движением робота, снабжённого оптронной линейкой – датчиком слежения за полосой, нанесённой на поверхность полигона. Был предложен метод организации движения робота на оснащённом системой маяков полигоне, основанный на построении виртуальной полосы, которая формируется в бортовом компьютере робота с таким расчётом, чтобы она огибала включённые маяки и обеспечивала прохождение заданной трассы. Автономное определение на борту робота его обобщённых координат позволяет сформировать «виртуальную оптронную линейку», сигнал с которой пропорционален отклонению робота от виртуальной полосы [9].
Сегодня, большинство роботов, ориентирующихся на местности, полагаются на одометрию (odometry - измерение пройденного пути) как на основу навигационной системы. Обычный одометрический измеритель включает в себя оптические кодировщики, спаренные с вращающимися осями.
Вот некоторые вращательные сенсоры, измеряющие перемещение и скорость используемые сегодня:
а) кодеры со щеточными контактами;
б) потенциометры;
в) оптические кодеры;
г) магнитные кодеры;
д) индуктивные кодеры;
е) емкостные кодеры.
Наиболее популярные вращательные кодеры - инкрементальный или абсолютный оптические кодеры.
В основе современных оптических сенсоров лежит уменьшенный сенсор, определяющий близость по прерыванию луча. В нем сфокусированный и направленный на определенный фотодетектор луч света периодически прерывается диском со специальными прорезями, вращающимся на валу. Развитие этой схемы кодирования - выходные данные, которые по сути своей цифровые, собираются в недорогой и надежной «упаковке» с хорошей помехоустойчивостью. Существует два основных вида оптических кодеров:
а) инкрементный - измеряет скорость вращения и может определить относительное положение;
б) абсолютный - измеряет точное угловое положение и может определить скорость.
Одноканальный тахометр - простейший вид инкрементного кодера. В основе механики - дискретный источник света, пульсирующий определенное количество раз за один оборот вала. Увеличение количества импульсов за оборот увеличивает разрешение кодера (и его стоимость). Это устройство хорошо подходит как измеритель скорости с обратной связью в средне и высокоскоростных системах управления. Но у них появляются проблемы с помехами и стабильностью на малых скоростях из-за ошибок дискретизации. К этим проблемам добавляется то, что одноканальный тахометр не способен определить направление вращения и, как следствие, не может быть использован как позиционирующий сенсор.
Абсолютные оптические кодеры обычно используются в приложениях с медленным вращением, для которых не допустима потеря информации о положении из-за временной потери питания. Лучше всего подходит для систем с медленным и/или нечастым вращением, в которых кодируется угол поворота (противоположность вычислениям, связанным с продолжительным высокоскоростным вращением, требуемые для вычисления перемещения по пути следования).
Потенциальное неудобство абсолютного кодера - параллелизм выходных данных, который требует более сложный интерфейс из-за большого количества проводов.
Одометрия дает хорошую кратковременную точность, недорогая и обладает очень большой частотой дискретизации. Но начальная идея одометрии - объединение увеличивающейся во времени двигательной информации, которое неизбежно приводит к накоплению ошибок. На практике, накапливаемые ошибки ориентации являются причиной большинства ошибок позиционирования, количество которых увеличивается пропорционально пути, пройденному роботом. Однако широко принято, что одометрия - очень важная часть навигационной системы робота и задача навигации упростилась, если точность одометрии была бы увеличена.
Ниже приведено несколько причин, по которым одометрия используется в МР:
а) данные одометрии могут быть объединены технологией абсолютного позиционирования (и другими технологиями) для получения лучшей и более точной оценки положения;
б) одометрия может быть использована в абсолютно позиционировании, улучшенном ориентирами (маяками) на местности. Давая необходимую точность позиционирования, повышая точность одометрии - это позволяет уменьшить частоту обновлений в абсолютном позиционировании. Как следствие - для данного маршрута требуется меньше маяков;
в) в некоторых ситуациях одометрия применима только в качестве навигационного информатора.
Альтернативный метод одометрие – инерционная навигация. Принцип работы включает непрерывное считывание даже малейшего ускорения по каждой из трех осей направлений и перемещение во времени, чтобы вычислить и положение. Платформа сенсора стабилизируется гироскопом, это необходимо для сохранения строгой ориентации трех акселерометров на протяжении всего процесса.
Хотя концепция метода проста, специфика реализации весьма требовательна. Главным образом это вызвано ошибками, причиной которых является стабильность (ее отсутствие), для обеспечения которой, чтобы гарантировать корректность вычисления положения, используются гироскопы.
Одним из преимуществ инерционной навигации является возможность обеспечивать быстрые, низко латентные динамические измерения.
Однако главным недостатком является то, что угловые и скоростные данные должны быть включены один и два раза (соответственно) для определения ориентации и линейного позиционирования (соответственно).
Другой вид навигации с помощью ориентиров. Существуют естественные и искусственные ориентиры.
Главная проблема навигации по природным ориентирам заключается в определении и сопоставлении характерных особенностей в данных, полученных от сенсоров. Такие сенсоры представляют собой машинное зрение. Большинство систем машинного зрения основаны на определении длинных отрезков прямых, например как в дверных проемах или точек соединения стен и потолка.
В системе позиционирования по природным ориентирам выделяют следующие базовые компоненты:
а) сенсор (обычно зрительный) детектирующий и выделяющий ориентиры на сцене;
б) метод сравнения, полученных в результате наблюдения, особенностей с картой известных ориентиров;
в)метод вычисления местоположения и локализации ошибок от сравнений.
Намного легче детектировать искусственные ориентиры, так как они разрабатываются с оптимальным контрастом. Вдобавок, для искусственного ориентира заранее известны точные размеры и форма. Многие системы позиционирования по искусственным ориентирам основаны на машинном зрении, а в качестве ориентиров чаще всего используются черный прямоугольник с белыми точками по углам, сфера с вертикальными и горизонтальными окружностями для калибровки, что позволяет определить пространственное (трехмерное) положение по одному изображению.
Точность описанного выше метода зависит от того, с какой точностью геометрические параметры ориентиров будут извлечены из изображения сцены, которая, в свою очередь, зависит от относительного положения и угла между роботом и ориентиром.
Существуют также ориентиры, которые используются не визуальными сенсорами. Наиболее часто используемые – штрих-код отражатель для лазерных сканеров.
Ещё один, широко используемый в индустрии, вид навигации по ориентирам, - это линейная навигация. Она может рассматриваться как навигация по непрерывным ориентирам, а из-за того, что в большинстве случаев сенсор, используемый в системе, должен находиться очень близко к линии, габариты устройства ограничены тем, что оно должно находиться в непосредственной близости от линии. Эта технология долгие годы использовалась в задачах промышленной автоматизации, а такие устройства обычно называли Автоматически Управляемые Устройства. Однако, технология не была детально изучена и, как следствие, не позволяла устройству двигаться свободно.
Основные реализации линейной навигации:
а) электромагнитное управление;
б) управление отражающей или оптической лентой;
в) ферритовое управление, где используется феррито магнитная пыль;
г) управление по термальным маркерам.
Основные особенности навигации по ориентирам:
а) навигация по природным маякам требовательна к постоянству окружающей обстановки;
б) навигация по искусственным маякам – недорогая и может обладать дополнительными информационными кодерами;
в) максимальное расстояние между роботом и ориентиром значительно меньше, чем в системах с активными маяками;
г) точность позиционирования зависит от расстояния и угла между роботом и ориентиром;
д) необходима большая вычислительна мощность, чем в системах с активными маяками;
е) внешние условия (такие как освещенность) могут быть причиной ошибок таких как: ориентир не может быть распознан, или некоторый объект ошибочно принят за ориентир;
ж) в навигации по ориентирам требуется, что бы робот знал свое примерное начальное положение для того, чтобы он знал где искать ориентиры. Если это требование не выполнено, то, очень часто, в систему включают функцию «всеохватного» поиска;
з) база данных маяков и их расположения в пространстве должна все время поддерживаться.
Существует навигация по карте. Картографическое позиционирование (также известное как «карто соответствующая» или "map matching") – это технология, по которой робот использует сенсоры для построения локальной карты местности. Эта локальная карта потом сравнивается с глобальной, предварительно сохраненной в памяти. После нахождения совпадений робот вычисляет свое текущее положение и ориентацию на местности. В качестве предварительно записанной карты может выступать САПР модель местности, или она может быть построена по предварительно полученным от сенсоров данным.
Основные преимущества картографического позиционирования приведены ниже:
а) она, естественно, используется на местности со структурой типичной для помещения и получает информацию о положении в окружении, не изменяя его;
б)она может быть использована для создания и обновления карты местности. Карты местности играю большую роль в других МР задачах, например при глобальном планировании пути;
в) она позволяет роботу изучить новую местность и повышает точность позиционирования при ее (местности) исследовании.
Недостатки картографической навигации связаны со следующими требованиями:
а) на местности должно быть достаточное количество стационарных, хорошо различимых деталей, по которым будет производиться сопоставление сенсоров должно быть ровно столько, сколько необходимо (в зависимости от поставленной задачи);
б) должна быть доступна значительная чувствительная и вычислительная мощность.
Проблема построения карты очень тесно связана с возможностями восприятия, она может быть определена следующим образом: «что сенсоры способны увидеть из заданного положения робота с данным множеством измерений?».
Представление, используемое для карты, должно обеспечивать возможность объединения на карте новой информации, поступающей от сенсоров. Также оно должно доставлять необходимую информацию для планирования маршрута и уклонения от препятствий.
Три главных шага в обработке сенсорных данных для построения карты:
а) извлечение характерных признаков из необработанных сенсорных данных;
б) объединение данных от сенсоров различных типов;
в) автоматизированное создание абстрактной модели местности.
Один из самых энергоемких аспектов картографической навигации – сопоставление карт. Сопоставление происходит при первоначальном извлечении характерных признаков, далее определяется точное соответствие между изображением и характеристиками модели. Работа по сопоставлению карт в сфере машинного зрения чаще всего фокусируется на общей проблеме сопоставления изображения, полученного из случайного положения и ориентации, по отношению к модели.
Алгоритмы сравнения можно разделить на алгоритмы, основанные на анализе изображения и основанные на анализе характерных признаков. Первые отличаются от вторых тем, что, во-первых, по карте сопоставить данные очень информативной точки на местности проще, чем данные представляющие собой малый набор особенностей. Вычисления в алгоритмах основанных на анализе характерных признаков быстрее, чем в алгоритмах основанных на анализе изображения и не требуют хороших предварительных головных вычислений. А вычисления в алгоритмах основанных на анализе изображения могут выполняться на меньшем количестве точек, чем требуется для вычисления в алгоритмах основанных на анализе характерных признаков, могут управляться не идеальной моделью местности и являются более точными.
Как и в навигации по ориентирам, выгодно использовать приблизительное вычисление положения, основанные на одометрии, для создания примерной визуальной сцены (по имеющейся карте), которую будет «видеть» робот. Далее, эта созданная сцена сравнивается с тем, что сейчас видит робот. Эта процедура эффективно снижает время необходимое для нахождения соответствий.
Одна из проблем систем позиционирования, основанных на анализе характерных признаков, заключается в том, что окрестность, находящаяся недалеко от положения робота, неопределенна. На практике это серьезная проблема, особенно если для установления характерных признаков используются ультразвуковые сенсоры, которые страдают недостаточным угловым разрешением.
В картографическом позиционировании выделяют два общих способа представления карт: геометрическое и топологическое. На геометрической карте объекты представляются в соответствии с их абсолютными геометрическими отношениями. Это может быть сеточная карта или более абстрактная линейная или полигональная карта. С другой стороны - топологический подход, он больше базируется на протоколировании геометрических отношений между отслеженными особенностями, чем на их абсолютное положение в координатах относительно некоторой системы отсчета. В отличии от геометрических карт, топологические карт могут строиться и поддерживаться без какой-либо положения робота. Как результат, этот подход может использоваться для интеграции карт больших территорий, так как все связи между узлами скорее относительные, чем абсолютные [8].
3.2 Выбор модели представления знаний в системе навигации
Навигация мобильных роботов является актуальной задачей современной робототехники. При этом процесс навигации включает в себя следующие этапы:
а) составление карты среды;
б) коррекция траектории движения робота;
в) планирование маршрута (выбор оптимального пути, ведущего к цели);
г) управление локальными перемещениями;
д) обход роботом опасных участков трассы.
Алгоритмическое решение этих задач, очевидно, должно опираться на информацию о рельефе поверхности, которая может быть известна априори, дополняться в процессе перемещения робота. Для прокладки маршрута используется глобальная информация о районе перемещения, например, в виде матрицы рельефа, каждый элемент которой соответствует определенному участку поверхности. Индексы отдельного элемента матрицы определяют линейные координаты участка местности, а значение элемента – относительную высоту этого участка.
Управление локальными перемещениями по известному маршруту осуществляется на основании информации о характере поверхности в ближней окрестности робота.
Если определить маршрут движения как последовательность опорных пунктов (подцелей) движения, включающую исходное и конечное (целевое) положения робота, то задача прокладки маршрута включает формирование некоторого множества подцелей и последующий выбор такого его подмножества, которое оптимизирует движение робота.
Процессу прокладки маршрута движения робота предшествует составление карты среды. С локальными перемещениями робота связаны задачи коррекции траектории движения и обхода опасных участков поверхности.
3.2.1 Составление карты среды
Сначала формируется карта рабочей зоны робота, при этом внешняя среда дискретизируется, и каждому участку, содержащему препятствие, ставится в соответствие информация о типе этого препятствия. Также предполагается, что для определения проходимости участков среды используется дистантная сенсорная подсистема сканирования на основе лазерного дальномера, а определение пройденного пути осуществляется с помощью одометрической подсистемы с применением метода пассивного колеса. Построение карты происходит одновременно с исследованием внешней среды.
Пусть в начальный момент времени внешняя среда не исследована, а робот находится в центре свободного участка 0 (рисунок 3.1), который считается началом координат создаваемой карты.
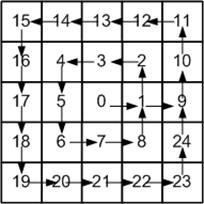
Рисунок 3.1 – Траектория движения робота при составлении карты
Участки с номерами 1-8 считаются потенциально проходимыми. Для уточнения их проходимости робот осуществляет последовательное сканирование данных участков. Сканирование начинается с участка номер 1. Если данный участок свободен, то выполняется перемещение в среде в направлении центра первого участка как показано на Рисунке 3.1. Причем величина перемещения равна максимальному из габаритных размеров участков, на которые дискретизируется среда. После этого считается, что робот переместился в центр следующего свободного участка. При этом координаты центра данного участка, рассчитываемые по формулам 3.1 и 3.2, наносятся на карту.
![]() ; (3.1)
; (3.1)
![]() . (3.2)
. (3.2)
Здесь ![]() ,
, ![]() – абсцисса и ордината
центра предыдущего участка,
– абсцисса и ордината
центра предыдущего участка, ![]() – величина
перемещения,
– величина
перемещения, ![]() – курсовой угол робота.
– курсовой угол робота.
В формуле (3.1) выбирается знак «+», если i-й участок расположен правее i-1 и знак «-», если левее. В формуле (3.2) знак «+» выбирается, если i-й участок расположен выше, чем i-1-й, и «-», если ниже. Также наряду с координатами центра каждому участку ставятся в соответствие индексы смещения по координатным осям X, Y относительно начального участка 0 (рисунок 3.1). Это делается для того, чтобы упорядочить хранение карты среды в памяти робота в соответствии с индексами участков. После того, как робот нанес информацию о первом участке на карту, он сканирует проходимость участков 2, 3, ..., 8 двигаясь против часовой стрелки по периметру участка 0, как показано на Рисунке 3.1. Если какой-то из данных участков оказывается занятым, то робот определяет, находится ли на нем препятствие либо цель и вносит информацию о данном участке на карту. После обследования участков 1-8 робот расширяет зону исследований и переходит к сканированию участков 9-23 и т.д. Данный процесс продолжается до тех пор, пока во внешней среде не останется ни одного неисследованного участка. После этого в памяти робота формируется карта его рабочей зоны.
Исходя из этого, строим алгоритм составления карты местности (рис.3.2).
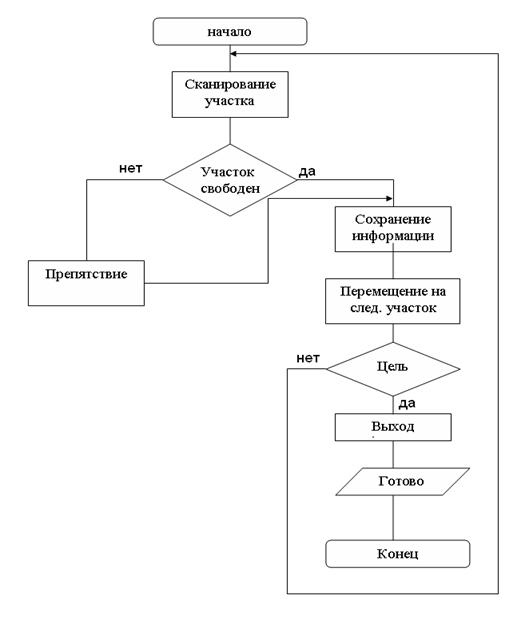
Рисунок 3.2 – Алгоритм составления карты местности
Зная смещение робота (![]() ,
, ![]() ) относительно центра
текущего участка можно определить индексы данного участка по следующим
формулам:
) относительно центра
текущего участка можно определить индексы данного участка по следующим
формулам:
![]() ; (3.4)
; (3.4)
![]() . (3.5)
. (3.5)
После составления карты среды робот должен использовать ее в процессе перемещений к цели. Однако полученная карта не может быть абсолютно точной из-за погрешностей измерений. Поэтому робот после каждого перемещения должен выполнять уточнение карты, позиции на ней. Составление карты местности в виде алгоритма приведено в приложении С.
3.2.2 Коррекция траектории движения робота
Задача коррекции связана с организацией следящего режима посредством списывания ошибок движения и коррекции траектории. Ошибки, поступающие от управляющей ЭВМ к роботу, вызваны, с одной стороны, накоплением ошибок сенсоров линейных перемещений, а с другой – возмущающими воздействиями со стороны окружающей среды. Ошибки сенсоров перемещений обычно зависят от пройденного расстояния. Если пренебречь возмущающими воздействиями, то тогда длина отрезка пути, по прохождении которого следует производить списывание таких накапливающихся ошибок, может быть выражена следующим образом:
S = mах (х1, х2, х3) ∆t. (3.6)
Здесь ∆t — временной интервал списывания.
В то же время:
S = ηE, (3.7)
где Е – максимальная допустимая ошибка в любом измерении;
η – коэффициент пропорциональности.
Тогда из (3.6) и (3.7) можно найти интервал списывания:
∆t = ηE / mах (х1, х2, х3) (3.8)
В каждом цикле списывания управляющая ЭВМ будет производить опрос сенсоров линейных перемещений, получение извне (от отдельной системы) точных значений координат местонахождения робота и коррекцию направления движения. При наличии возмущающих воздействий интервал списывания не может оставаться постоянным, поскольку ошибки движения приобретают случайный характер.
Согласно принятому алгоритму управления роботом его движение, начиная от некоторого начального состояния, в дальнейшем определяется целиком этим и целевым состояниями и не зависит от предыстории движения.
В качестве начального состояния будем каждый раз брать состояние робота в момент связи с управляющей ЭВМ, а целевое сохранять одним и тем же. Кроме того, скорости перемещения (х1, х2, х3) робота из начального состояния без учета возмущений будем выбирать таким образом, чтобы результирующий вектор скорости совпадал с направлением на цель движения. Введем обозначения: х10, х20, х30 – значения координат робота, полученные извне от отдельной навигационной системы; х1, х2, х3— те же координаты, полученные по показаниям сенсоров. Тогда скорости «сноса» по координатам на (n + 1)-м цикле приближенно определяются как:
∆х1 = х10 - х11 / ∆ t n ;
∆х2 = х20 – х21 / ∆ t n ; (3.9)
∆х3 = х30 – х31 / ∆ t n .
Здесь ∆ t n — интервал опроса на n-м цикле.
Рассматривая совместно (3.8) и (3.9), можно записать выражение для ∆ t n+1:
∆ t n+1 = ηE / mах (х1+∆х1, х2+∆х2, х3+∆х3) (3.10)
которое позволяет корректировать значение интервала списывания на предстоящий цикл. Одновременно с помощью (3.9) можно осуществлять коррекцию движения с учетом зафиксированного на данном цикле «сноса» робота с заданной траектории.
3.2.3 Планирование маршрута
Далее робот может произвести акт движения по карте. Пусть цель задана на карте и не попадает в зону восприятия сенсорной подсистемы (СП) робота. Тогда определяется направления движения на каждом шаге. Принятое решение реализуется исполнительными устройствами робота. После этого вновь считывается карта среды, но с учетом произошедшего перемещения робота. Вновь определяется промежуточная цель, определяется и отрабатывается следующее направление движения и т.д. до выхода в зону цели.
Введем следующие обозначения:
![]() – функционал, определяющий возможные
расстояния между целью
– функционал, определяющий возможные
расстояния между целью ![]() и текущим
положением робота
и текущим
положением робота ![]() на карте среды;
на карте среды;
![]() – вектор, определяющий промежуточное
положение цели;
– вектор, определяющий промежуточное
положение цели;
![]() – единичный вектор направления к
цели на карте среды;
– единичный вектор направления к
цели на карте среды;
![]() - максимальный радиус радиального
плана;
- максимальный радиус радиального
плана;
![]() – функционал, определяющий
допустимые расстояния между истинным положением робота
– функционал, определяющий
допустимые расстояния между истинным положением робота ![]() в среде и промежуточной
«воображаемой» целью на плане;
в среде и промежуточной
«воображаемой» целью на плане;
![]() – оператор коррекции текущего
положения робота на карте;
– оператор коррекции текущего
положения робота на карте;
![]() – единичный вектор направления на
промежуточную цель;
– единичный вектор направления на
промежуточную цель;
![]() – модуль скорости робота;
– модуль скорости робота;
![]() – модуль вектора градиента;
– модуль вектора градиента;
![]() – длина траектории.
– длина траектории.
Тогда, алгоритм движения к цели по карте может быть сформулирован следующим образом:
1. ![]()
2. если ![]() ,
то 11, иначе – следующий шаг;
,
то 11, иначе – следующий шаг;
3. ![]()
4. ![]()
5. ![]()
6. ![]()
7. ![]()
8. определить ![]() , положить
, положить ![]()
9. ![]() ( шаг в направлении
( шаг в направлении ![]() );
);
10. ![]() , перейти к 1;
, перейти к 1;
11. если ![]() то
останов, иначе – следующий шаг;
то
останов, иначе – следующий шаг;
12. ![]()
13. определить ![]()
14. определить ![]() ;
;
15. ![]() (шаг в направлении
(шаг в направлении ![]() ), перейти к 1.
), перейти к 1.
Данный алгоритм построен так, что в начале осуществляется проверка наличия цели в поле зрения робота, и если цель отсутствует, то в пунктах 3-9 выполняется процедура движения по карте, а в пункте 10 – коррекция положения робота на карте среды. В случае попадания цели в зону восприятия СП карта не используется и происходит движение к цели только на основе сенсорной информации (пункты 11-15 алгоритма движения) [10].
3.2.4 Алгоритм управления локальными перемещениями
Как было сказано выше, стратегия движения робота состоит в прохождении опорных точек в последовательности, которая предписывается выбранным маршрутом. Переменные состояния робота в опорных точках принимают определенные значения.
Координаты точек соответствуют направлению на подцель на заданном отрезке траектории. При отсутствии случайных возмущений и ошибок в оценке рельефа на этапе обзора такое движение будет происходить по прямой. Однако это предположение является идеальным случаем. При управлении роботом нужно ещё уметь решать задачу коррекции траектории движения и обхода опасных участков вблизи препятствий.
3.2.5 Алгоритмы управления при обходе роботом опасных участков трассы
В соответствии с изложенными ранее принципами управления перемещением робота задачу обхода «пропущенных» при планировании маршрута препятствий и опасных участков можно трактовать как генерацию новых целей и связанных с ними состояний робота в моменты обнаружения новых препятствий.
При обходе одиночных препятствий можно использовать следующий алгоритм управления для случая, когда отсутствует информации об участках поверхности, удаленных от робота более чем на n ячеек матрицы А (рисунок 3.2).
Для каждого из m направлений движения робота, возможных в данный момент, составляется полный вес Рi данного направления, определяемый формулой
Рi = ∑gk Pki , (3.11)
где Pki – оценка i-го направления блоком оценки (Б1 – Б5),
gk – вес оценки.
В качестве направления очередного шага выбирается направление m, получившее наибольший вес Рm.
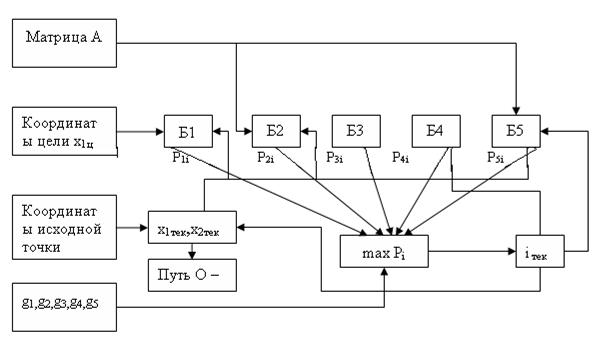
Рисунок 3.4 – Структурная схема алгоритма обхода опасных участков трассы
Блок Б1 выделяет направление на цель из текущей составляющей на шаге i:
P1i=(x1ц– x1тек)cos π/4(i – 1) + (x2ц– x2тек)sin π/4(i – 1)/
√ (x1ц– x1тек)² + (x2ц– x2тек)² (3.12)
Блок Б2 выделяет среди соседних клеток текущего состояния занятые, а именно Р2i=1, если клетка (x1тек +∆x1i, x2тек +∆x2i) занята и Р2i=0 – в противном случае.
Блок Б3 задает случайные оценки Р3i=z, в котором случайные числа выбираются с равномерной вероятностью на отрезке [0,1].
Блок Б4 определяет инерцию робота, оценка Р4i=1, для направления i0, по которому был сделан предыдущий шаг; Р4i=1/2 – для направлений, отличающихся от i0 на π/4, и Р4i=0 для остальных направлений.
Блок Б5 имитирует «ближнюю предусмотрительность» и дает сигнал о простейших тупиковых ситуациях за один шаг. Оценка Р5i=1, если после шага в i-м направлении роботу придется поворачиваться на угол, больший чем π/4, и Р5i=0, если после шага в i-м направлении есть возможность продолжить движение, не поворачиваясь более чем на π/4.
Выбраны 5 признаков k для оценки:
а) g1 – задает важность выдерживания направления на цель, при g1<0 робот удаляется от цели;
б) g2 – характеризует отношение робота к препятствиям: при g2<0 робот избегает препятствий, при g2>0 робот стремится идти по клеткам, занятым препятствиями;
в) g3 – определяет степень хаотичности в движении робота и может меняться в процессе поиска пути в сложных ситуациях. В случае «осознания» тупика, когда последние M шагов не привели к сокращению расстояния до цели:
rха = √ (x1ц– x1тек)² + (x2ц– x2тек)², (3.13)
при этом вес g3 постепенно увеличивается в диапазоне [0, 1], пока поиск управления не становится случайным. Тогда вероятность попадания на любую незанятую клетку описывается уравнением типа диффузии, и при любой форме тупика робот в конце концов найдет выход;
г) g4 – робот стремится поворачиваться плавно и выдерживать движение по прямой при g4>0, робот рыскает из стороны в сторону и склонен к резким поворотам при g4<0;
д) g5 – характеризует «осторожность» робота, при g5<0 робот «предостерегается» от перпендикулярного приближения к стене и заходов в угол.
3.2.6 Результат использованного метода
Таким образом, задачей робота является исследование среды с целью составления ее карты и нахождение цели. Как отмечалось выше, сначала робот осуществляет построение карты внешней среды, двигаясь из начальной точки (рисунок 3.5) в соответствии с предложенной методикой.
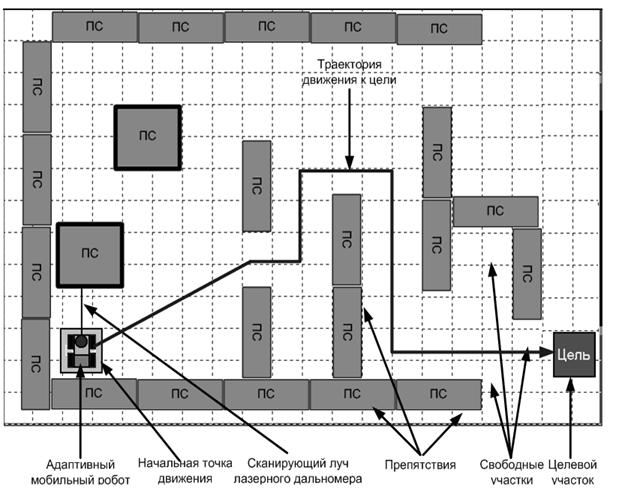
Рисунок 3.5 – Нахождение оптимального пути
В результате этого формируется карта (рисунок 3.5), где белым цветом отмечены участки свободные для перемещения робота, черным – участки, занятые препятствием, а серым – целевой участок. Затем робот помещается в начальную точку движения. При этом его задачей является нахождение оптимального (в смысле длины траектории) пути движения к цели. Действуя в соответствии с описанным алгоритмом навигации по карте, робот достигает цели по траектории (рисунок 3.6), которая, очевидно, является наиболее оптимальной из всех траекторий, ведущих к цели.
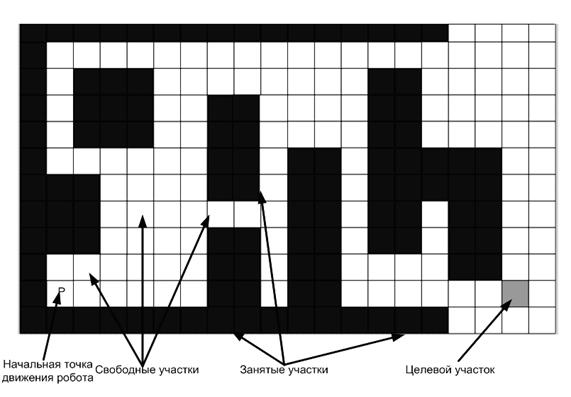
Рисунок 3.6 – Отображение карты среды
Исходя из этого, применение описанного метода позволяет роботу строить карту внешней среды и эффективно планировать траекторию движения к цели [11].
4 СТРУКТУРА СИСТЕМЫ УПРАВЛЕНИЯ РОБОТОМ ДЛЯ НАВИГАЦИИ
Система управления мобильным роботом должна решать следующие задачи:
а) обработка сенсорных данных (в т.ч. данных от интерфейса с оператором) с целью сбора информации о роботе и внешней среде вокруг него;
б) планирование мероприятий по уяснению целевого задания и планирование последовательности подзадач, необходимых для выполнения этого задания;
в) формирование таких программных траекторий движения МР, которые бы приводили к выполнению роботом локальной подзадачи (например, прибытие к целевой точке в среде с препятствиями);
г) формирование таких задающих воздействий на исполнительные механизмы робота, которые бы приводили к максимально точному и быстрому выполнению ими программной траектории движения.
Одной из особенностей построения системы управления интеллектуального мобильного робота является то, что она строится по иерархическому многоуровневому принципу, согласно которому с повышением иерархического ранга подсистемы повышается ее степень интеллектуальности (рисунок 4.1). Самым верхним звеном этой иерархии является система управления поведением, далее следует система управления движением, а система управления исполнительными механизмами является самым низшим звеном этой иерархии. Кроме перечисленных подсистем в структуре имеется информационно-измерительная система, которая также должна обладать некоторыми интеллектуальными возможностями, и интерфейс с оператором.
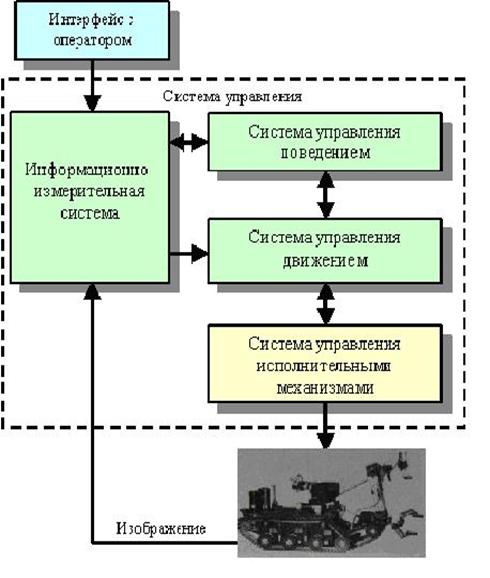
Рисунок 4.1 - Структура системы управления мобильного робота
Система управления поведением (стратегический уровень) предназначена для формирования целесообразного поведения робота для выполнения задачи, поставленной перед ним. На выходе эта система формирует целеуказание для системы управления движением: целевая точка пути, требуемое состояние приводов робота, команды управления режимами работы информационно-измерительной системы.
Система управления движением (тактический уровень) предназначена для планирования таких программных траекторий движения робота, которые бы приводили робота в указанное целевое состояние в среде с препятствиями, учитывая динамические характеристики робота. Целевое состояние для этой системы формирует система управления поведением. На выходе данная система формирует требуемое командное значение скоростей линейного движения и поворота робота.
Система управления исполнительными механизмами (приводной уровень системы управления) решает задачи управления исполнительными механизмами робота. Эта система реализует интерфейс с аппаратной частью робота (электрические и механические устройства, необходимые для работы робота).
Информационно-измерительная система предназначена для сбора, обработки и преобразования сенсорной информации в сигналы, удобные для использования в системе управления робота. Видеоизображение, полученное с телекамеры, преобразуется в набор параметров, на основе которых другие подсистемы принимают те или иные решения.
Данный робот может быть оснащен четырьмя цветными камерами, объединенными в одно целое в корпусах с двойными галогенными рефлекторами, что делает возможным работу при недостаточном освещении или в полной темноте.
Две камеры подвижные: одна помещена спереди передвижной платформы на сервомоторе, регулирующем угол наклона движущейся передней гусеницы. Благодаря этому поле зрения изменяется вместе с поднятием или опусканием передней гусеницы. Вторая направлена назад, помещена на вращающейся основе манипулятора. Поле зрения оператора изменяется вместе с вращением основы манипулятора. Манипуляционная камера помещена на захвате. Угол зрения камер 90°.
Основная камера помещена на верхнем плече манипулятора. Она установлена на вращающейся головке, позволяющей вращение камеры в горизонтальной и вертикальной плоскостях. Камера оснащена объективом с переменным фокусом с возможностью автоматического регулирования диафрагмы, а также с возможностью ручного, дистанционного регулирования резкости и фокуса [12].
Интерфейс между оператором и передвижным роботом представляет собой экранное меню для демонстрирования изображения из камер и интерпретации данных, получаемых от датчиков, и переносной пульт управления, который разделен на следующие секции:
а) джойстик (с переключателем быстро/медленно, для управления скоростью передвижной платформы);
б) секция управления манипулятором: (по три переключателя для каждой степени свободы манипулятора: два-для управления направлением движения с постоянной скоростью движения, один - для включения поста с помощью джойстика);
в) джойстик для управления манипулятором с переключателем выбора камер;
г) управления вооружением (четыре переключателя для четырех независимых видов оружия или оснащения, защищены дополнительным переключателем, а также зажиганием) [4].
ВЫВОДЫ
Разработка интеллектуальных мобильных роботов (ИМР) для различных производственных и исследовательских целей является весьма важной и актуальной задачей.
В настоящее время выполнено огромное число исследований, связанных с разработкой алгоритмов управления, обеспечивающих решение с помощью мобильных роботов таких нетривиальных операций, как: составление карты местности, её уточнение, планирование траекторий, обход препятствий, выявляемых при движении, проникновение в труднодоступные зоны и т.д.
Дальнейшие исследования новых типов мобильных роботов стимулируется многочисленными приложениями в самых различных областях человеческой деятельности (автоматизация управления движением транспортных средств, борьба с терроризмом и разминирование подозрительных предметов, работа в условиях сильной задымленности во время пожаротушение, инспекция территорий, зараженных химическими веществами, самостоятельное патрулирование назначенных территорий и др.).
Для эффективного функционирования интеллектуальные роботы снабжены системой восприятия внешней среды, средствами анализа ситуаций и принятия решений и осуществляют планирование движения (в том числе и построение трассы).
В данной работе техническое задание было изучено и полностью решено.
На будущее планируется решение следующих вопросов:
а) экспериментальные исследования выбора маршрута;
б) поиск более эффективных алгоритмов достижения цели;
в) рассмотрение карты в трехмерном пространстве;
г) рассмотрение методов навигации МР, участвующих в гонках «Крепкий орешек».
ПЕРЕЧЕНЬ ССЫЛОК
1. Гейтс, Б. Механическое будущее [Текст] / Б. Гейтс // Журн. «В мире науки». - 2007. - №7. - С. 37-43
2. Бобровский, С.Н. Навигация мобильных роботов [Текст] / С.Н. Гончаров// Журн. PC Week. - 2004. - №9. - С. 60-63
3. Управление роботами. Состояние и перспективы [Текст] : материалы ХХ общ. собрания академии навигации и управления движением, 26 октября 2005 г. С.-Петербург / редкол : П.К.Плотников (отв. ред.). - С.-Петербург: Электроприбор, 2008. - 20 с.
4. Палагин В.А. Техническое задание на перспективную разработку мобильного робота для использования в чрезвычайных ситуациях [Текст] / Разработка СКБ «Робототехника и мехаторника» ХНУРЕ - Харьков, 2008. - 18 с.
5. Инструментарии роботостроения [Электронный ресурс] / Колорадо,
M. Тим Джонс. - Режим доступа: www/ URL:http://developerworks/ ru/library/lrobotools/#author.php/ - 05.09.2008 г. - Загл. с экрана.
6. Баранов, Д.Н. Разработка интеллектуальной системы управления мобильными роботами на основе следящей системы технического зрения и нечеткой логики [Текст] : автореф. дис. кандидата техн. наук: 12.06.08 / Д.Н. Баранов; [Ун-т «СТАНКИН»]. - М., 2008. - 222с.
7. Навигация зрячего робота [Электронный ресурс] Режим доступа: www/ URL: http://cofelis.ru/?page_id=46&page=3.php/ - 17.09.2008 г. - Загл. с экрана.
8. Навигация мобильных роботов [Электронный ресурс] / Лондон, Имперский Колледж. - Режим доступа: www/ URL: http://computer-vision.ucoz.ru/MobRoboNavigati/mobile_robot_navigation.php/- 10.06.1997 г. – Загл. с экрана.
9. Мартыненко, Ю. Г. Управление движением мобильных колёсных роботов [Текст] / Ю.Г. Мартыненко - МГУ им. М.В. Ломоносова, 2005. - 29-80с.
10. Однородные управляющие структуры адаптивных роботов [Текст] : А.В. Каляев, Ю.В. Чернухин и др.; гл. ред. физ.-мат. лит. - М.: Наука, 1990. - 152 с.
11. Управление роботами от ЭВМ [Текст] : учеб. / Е. И. Юревич, С.И. Новаченко, В.А. Павлов и др.; под. ред. Е. И. Юревича - Л. : Энергия, 1980. - 264с.
12. Интеллектуальный мобильный робот [Электронный ресурс] / - Евстигнеев Д.В. - Режим доступа: www/ URL: http://robot-rad.narod.ru/index.php/ - 15.02.2008г. - Загл. с экрана.
ПРИЛОЖЕНИЕ А
Связь домашних роботов и персональных компьютеров

ПРИЛОЖЕНИЕ Б
Общий вид МРИЧС
| Разработка экстремальных туристских маршрутов на Российском Севере (по ... | |
|
Министерство образования Российской Федерации Сочинский государственный университет туризма и курортного дела Институт туристского и гостиничного ... ... материала, работа снабжена достаточным количеством схем, таблиц, некоторые показатели в которых приходилось считать самостоятельно, а также подробными картами маршрутов. Отдельные части маршрутов проходят по вполне "приличным" дорогам и поэтому не связаны с преодолением естественных препятствий. |
Раздел: Рефераты по туризму Тип: реферат |
| Робототехника в нашей жизни | |
|
Введение. Каждый год на рынке робототехники "прокручивается" 5 - 6 миллиардов долларов, и эта цифра постоянно растет. Видимо, век накопления знаний и ... Сухопутный робот упирается в непреодолимое препятствие - высокую перегородку. Гироскоп, фотодатчики, ультразвуковые и инфракрасные сенсоры помогут "умному" чемодану обходить препятствия, учитывать движение по наклонной плоскости, останавливаться перед краем ... |
Раздел: Рефераты по информатике, программированию Тип: реферат |
| Транспортное обслуживание туристов | |
|
Н.Н. ПИЛИПУК Транспортное обслуживание в туризме Учебно-методический комплекс Минск 2009 Содержание Тема 1. Транспортное обслуживание туристов 1.1 ... Наиболее мобильные виды транспорта - автобус и легковой автомобиль - используются как на самостоятельном маршруте, так и в виде вспомогательного (трансфертного) транспорта по ... При перевозке, включающей более пары городов, следует выбирать такой маршрут, чтобы его траектория была как можно ближе к прямой линии поскольку это связано с определенными ... |
Раздел: Рефераты по физкультуре и спорту Тип: учебное пособие |
| Основы техники ориентирования на местности | |
|
Основы техники ориентирования на местности. Содержание лекции 1. Понятие техники ориентирования и ориентиров местности. Классификация ориентиров ... Туристы движутся по маршруту вдоль опознанных на местности и обозначенных на карте линий (идут по дорогам и просекам, плывут по рекам и т.д.); или пересекают объекты местности ... Следовательно, ориентирование с использованием карты и компаса включает в себя ряд технических приемов (действий): опознание на местности объектов и элементов рельефа (ориентиров ... |
Раздел: Рефераты по физкультуре и спорту Тип: учебное пособие |
| Топографическая подготовка туриста | |
|
Топографическая подготовка туриста. Содержание лекции. 1. Понятие карты местности. Классификация карт местности. 2. Условные знаки топографических ... Наиболее точно (со средней ошибкой 0,1-0,2мм в масштабе карты) показываются геодезические пункты и некоторые ориентиры (отдельные выделяющиеся башни, заводские трубы, церкви и т. п ... Туристские схемы - это планы местности, зарисованные методом глазомерной съемки с нанесенными на них местными предметами, ориентирами, перевалами, возможными путями прохода и ... |
Раздел: Рефераты по физкультуре и спорту Тип: учебное пособие |