Реферат: Спутниковая система ГЛОНАСС
1. Исторические сведения…………………………………….………..3
2. Структура спутниковых радионавигационных систем…………6
2.1. Подсистема космических аппаратов………………………………7
2.2. Наземный командно-измерительный комплекс………………….8
2.3. Навигационная аппаратура потребителей СРНС………..………9
2.4. Взаимодействие подсистем СРНС в процессе определения
текущих координат спутников…………………………………..………9
3. Основные навигационные характеристики НС…………….……10
4. Решение навигационной задачи……………………………………..13
5. СРНС ГЛОНАСС………………………………………………………14
5.1. Структура и основные характеристики……………………………14
5.2. Назначение и состав подсистемы контроля и управления……..16
5.2.1. Центр управления системой……………………………………..16
5.2.2. Контрольные станции…………………………………………….17
5.2.3. Эфемеридное обеспечение………………………………………..18
5.2.4. Особенности формирования эфемеридной
информации в ГЛОНАСС……………………………………………….18
ЛИТЕРАТУРА……………………………………………………………..19
1. Исторические сведения
Развитие отечественной спутниковой радионавигационной системы (СРНС) ГЛОНАСС имеет уже практически сорокалетнюю историю, начало которой положено, как чаще всего считают, запуском 4 октября 1957 г. в Советском Союзе первого в истории человечества искусственного спутника Земли (ИСЗ). Измерения доплеровского сдвига частоты передатчика этого ИСЗ на пункте наблюдения с известными координатами позволили определить параметры движения этого спутника.
Обратная задача была очевидной: по измерениям того же доплеровского сдвига при известных координатах ИСЗ найти координаты пункта наблюдения.
Научные основы низкоорбитальных СРНС были существенно развиты в процессе выполнения исследований по теме "Спутник" (1958—1959 гг.). Основное внимание при этом уделялось вопросам повышения точности навигационных определений, обеспечения глобальности, круглосуточности применения и независимости от погодных условий.
Проведенные работы позволили перейти в 1963 г. к опытно-конструкторским работам над первой отечественной низкоорбитальной системой, получившей в дальнейшем название "Цикада".
В 1979 г. была сдана в эксплуатацию навигационная система 1-го поколения "Цикада" в составе 4-х навигационных спутников (НС), выведенных на круговые орбиты высотой 1000 км, наклонением 83° и равномерным распределением плоскостей орбит вдоль экватора. Она позволяет потребителю в среднем через каждые полтора-два часа входить в радиоконтакт с одним из НС и определять плановые координаты своего места при продолжительности навигационного сеанса до 5 ... 6 мин.
В ходе испытаний было установлено, что основной вклад в погрешность навигационных определений вносят погрешности передаваемых спутниками собственных эфемерид, которые определяются и закладываются на спутники средствами наземного комплекса управления. Поэтому наряду с совершенствованием бортовых систем спутника и корабельной приемоиндикаторной аппаратуры, разработчиками системы серьезное внимание было уделено вопросам повышения точности определения и прогнозирования параметров орбит навигационных спутников.
Была отработана специальная схема проведения измерений параметров орбит средствами наземно-комплексного управления, разработаны методики прогнозирования, учитывающие все гармоники в разложении геопотенциала.
Проведены работы по уточнению координат измерительных средств и вычислению коэффициентов согласующей модели геопотенциала, предназначенной специально для определения и прогнозирования параметров навигационных орбит. В результате точность передаваемых в составе навигационного сигнала собственных эфемерид была повышена практически на порядок и составляет в настоящее время на интервале суточного прогноза величину » 70 ... 80 м, а среднеквадратическая погрешность определения морскими судами своего местоположения уменьшилась до 80 ... 100 м.
Для оснащения широкого класса морских потребителей разработаны и серийно изготавливаются комплектации приемоиндикаторной аппаратуры "Шхуна" и "Челн". В дальнейшем спутники системы "Цикада" были дооборудованы приемной измерительной аппаратурой обнаружения терпящих бедствие объектов, которые оснащаются специальными радиобуями, излучающими сигналы бедствия на частотах 121 и 406 Мгц. Эти сигналы принимаются спутниками системы "Цикада" и ретранслируются на специальные наземные станции, где производится вычисление точных координат аварийных объектов (судов, самолетов и др.).
Дооснащенные аппаратурой обнаружения терпящих бедствие спутники "Цикада" образуют системы "Коспас". Совместно с американо-франко-канадской системой "Сарсат" они образуют единую службу поиска и спасения, на счету которой уже несколько тысяч спасенных жизней.
Успешная эксплуатация низкоорбитальных спутниковых навигационных систем морскими потребителями привлекла широкое внимание к спутниковой навигации. Возникла необходимость создания универсальной навигационной системы, удовлетворяющей требованиям всех потенциальных потребителей: авиации, морского флота, наземных транспортных средств и космических кораблей.
Выполнить требования всех указанных классов потребителей низкоорбитальные системы в силу принципов, заложенных в основу их построения, не могли. Перспективная спутниковая навигационная система должна обеспечивать потребителю в любой момент времени возможность определять три пространственные координаты, вектор скорости и точное время. Для получения потребителей трех пространственных координат беззапросным методом требуется проведение измерений навигационного параметра не менее чем до четырех спутников, при этом одновременно с тремя координатами местоположения потребитель определяет и расхождение собственных часов относительно шкалы времени спутниковой системы.
Исходя из принципа навигационных определений, выбрана структура спутниковой системы, которая обеспечивает одновременную в любой момент времени радиовидимость потребителей, находящимся в любой точке Земли, не менее четырех спутников, при минимальной общем их количестве в системе. Это обстоятельство ограничило высоту орбиты навигационных спутников 20 тыс. км, (дальнейшее увеличение высоты не ведет к расширению зоны радиообзора, а, следовательно, и к уменьшению необходимого количества спутников в системе). Для гарантированной видимости потребителем не менее четырех спутников, их количество в системе должно составлять 18, однако оно было увеличено до 24-х с целью повышения точности определения собственных координат и скорости потребителя путем предоставления ему возможности выбора из числа видимых спутников четверки, обеспечивающей наивысшую точность.
Одной из центральных проблем создания спутниковой системы, обеспечивающей беззапросные навигационные определения одновременно по нескольким спутникам, является проблема взаимной синхронизации спутниковых шкал времени с точностью до миллиардных долей секунды (наносекуд), поскольку рассинхронизация излучаемых спутниками навигационных сигналов в 10 нс вызывает дополнительную погрешность в определении местоположения потребителя до 10 ... 15 м.
Решение задачи высокоточной синхронизации бортовых шкал времен потребовало установки на спутниках высокостабильных бортовых цезиевых стандартов частоты с относительной нестабильностью 1•1013 и наземного водородного стандарта с относительной нестабильностью 1×1014, а также создания наземных средств сличения шкал с погрешностью 3 ... 5 нс.
С помощью этих средств и специального математического обеспечения производится определение расхождений бортовых шкал времени с наземной шкалой и их прогнозирование для каждого спутника системы. Результат прогноза в виде поправок к спутниковым часам относительно наземных закладываются на соответствующие спутники и передаются ими в составе цифровой информации навигационного сигнала. Потребителями таким образом устанавливается единая шкала времени. Расхождение этой шкалы с наземной шкалой времени системы не превышает 15 ... 20 нс.
Второй проблемой создания высокоорбитальной навигационной систем является высокоточное определение и прогнозирование параметров орбит навигационных спутников.
Достижение необходимой точности эфемерид навигационных спутнике потребовало проведения большого объема работ по учету факторов второго порядка малости, таких как световое давление, неравномерность вращения Земли и движение ее полюсов, а также исключение действия на спутник в полете реактивных сил, вызванных негерметичностью двигательных установок газоотделением материалов покрытий.
Для экспериментального определения параметров геопотенциала на орбиты навигационных спутников были запущены два пассивных ИЗС "Эталон ("Космос-1989" и "Космос-2024"), предназначенных для измерения параметров их движения высокоточными квантово-оптическими измерительным средствами. Благодаря этим работам достигнутая в настоящее время точность эфемерид навигационных спутников при прогнозе на 30 ч составляет: вдоль орбиты — 20 м; по бинормали к орбите — 10 м; по высоте 5 м (СКО).
Летные испытания высокоорбитальной отечественной навигационной
системы, получившей название ГЛОНАСС, были начаты в октябре 1982 г. запуском спутника "Космос-1413"..."
В 1995 г. было завершено развертывание СРНС ГЛОНАСС до ее штатного состава (24 НС). В настоящее время предпринимаются большие усилия по поддержанию группировки.
Разработаны самолетная аппаратура АСН-16, СНС-85, АСН-21, наземная аппаратура АСН-15 (РИРВ), морская аппаратура "Шкипер" и "Репер" (РНИИ КП) и др.
Основным заказчиком и ответственным за испытания и управление системами являются Военно-космические силы РФ.
В рассматриваемый период времени в США также проведены интенсивные разработки СРНС. В 1958 г. в рамках создания первого поколения атомных ракетных подводных лодок "Полярис" была создана система "Транзит" (аналог СРНС "Цикада"), введенная в строй в 1964 г.
В начале 70-х годов начаты работы по созданию СРНС второго поколения — ОР5/"Навстар" (аналога отечественной системы ГЛОНАСС). Спутниковая радионавигационная система GPS полностью развернута в 1993 г.
В соответствии с Постановлением Правительства РФ № 237 от 7 марта 1995 г. основными направлениями дальнейших работ являются:
· модернизация СРНС ГЛОНАСС на основе модернизированного спутника ГЛОНАСС-М с повышенным гарантийным сроком службы (пять лет«и более вместо трех в настоящее время) и более высокими техническими характеристиками, что позволит повысить надежность и точность системы в целом;
· внедрение технологии спутниковой навигации в отечественную экономику, науку и технику, а также создание нового поколения навигационной аппаратуры потребителей, станций дифференциальных поправок и контроля целостности;
· разработка и реализация концепции российской широкозонной дифференциальной подсистемы на базе инфраструктуры Военно-космических сил ее взаимодействия с ведомственными региональными и локальными дифференциальными подсистемами, находящимися как на территории России, так и за рубежом;
· развитие сотрудничества с различными международными и зарубежными организациями и фирмами в области расширения использования возможностей навигационной системы ГЛОНАСС для широкого круга потребителей;
· решение вопросов, связанных с использованием совместных навигационных полей систем ГЛОНАСС и GPS в интересах широкого круга потребителей мирового сообщества: поиск единых подходов к предоставлен услуг мировому сообществу со стороны космических навигационных систем, согласование опорных систем координат и системных шкал времени; выработка мер по недопущению использования возможностей космических навигационных систем в интересах террористических режимов и группировок.
Работы в указанных направлениях ведутся в соответствии с требованиями, выдвигаемыми различными потребителями (воздушными, морскими речными судами, наземными и космическими средствами, топогеодезическими, землеустроительными и другими службами).
Структура спутниковых радионавигационных систем
Структура, способы функционирования и требуемые характеристики подсистем СРНС во многом зависят от заданного качества навигационного обеспечения и выбранной концепции навигационных измерений. Для достижения таких важнейших качеств, как непрерывность и высокая точность навигационных определений, в глобальной рабочей зоне в составе современной СРНС типа ГЛОНАСС и GPS функционируют три основные подсистемы (рис. 1):
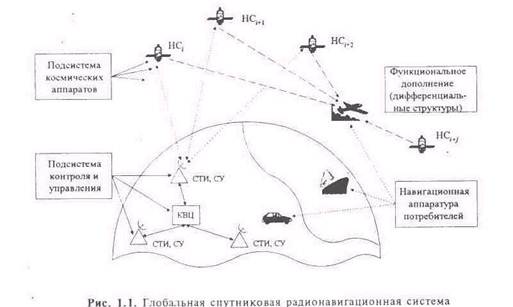
Ø космических аппаратов (ПКА), состоящая из навигационных ИСЗ (в дальнейшем ее называем сетью навигационных спутников (НС) или космическим сегментом);
Ø контроля и управления (ПКУ) (наземный командно-измерительный комплекс (КИК) или сегмент управления);
Ø аппаратура потребителей (АП) СРНС (приемоиндикаторы (ПИ) или сегмент потребителей). Разнообразие видов приемоиндикаторов СРНС обеспечивает потребности наземных, морских, авиационных и космических (в пределах ближнего космоса) потребителей.
Основной операцией, выполняемой в СРНС с помощью этих сегментов, является определение пространственных координат местоположения потребителей и времени, т. е. пространственно-временных координат (ПВК). Эту операцию осуществляют в соответствии с концепцией независимой навигации, предусматривающей вычисление искомых навигационных параметров непосредственно в аппаратуре потребителя. В рамках этой концепции в СРНС выбран позиционный способ определения местоположения потребителей на основе беззапросных (пассивных) дальномерных измерений по сигналам нескольких навигационных искусственных спутников Земли с известными координатами.
Выбор концепции независимой навигации и использование беззапросных измерений обеспечили возможность достижения неограниченной пропускной способности СРНС. По сравнению с зависимой навигацией, не предусматривающей процедуры вычислений ПВК в ПИ СРНС, произошло усложнение аппаратуры потребителей. Однако современные достижения в области технологий сделали возможной реализацию таких подходов при решении проблемы навигационных определений в СРНС.
Высокая точность определения местоположения потребителей обусловлена многими факторами, включая взаимное расположение спутников и параметры их навигационных сигналов. Структура космического сегмента обеспечивает для потребителя постоянную видимость требуемого числа спутников.
В настоящее время считается целесообразным введение в состав СРНС региональных дополнительных систем, обеспечивающих реализацию наиболее строгих требований потребителей. Эти структуры позволяют существенно повысить точность обсерваций, обнаруживать и идентифицировать нарушения в режимах работы СРНС, недопустимое ухудшение качества ее функционирования и своевременно предупреждать об этом потребителей, т. е. они могут осуществлять контроль целостности системы и поддерживать режим дифференциальных измерений.
2.1. Подсистема космических аппаратов
Подсистема космических аппаратов СРНС состоит из определенного числа навигационных спутников. Основные функции НС — формирование и излучение радиосигналов, необходимых для навигационных определений потребителей СРНС, контроля бортовых систем спутника подсистемой контроля и управления СРНС. С этой целью в состав аппаратуры НС обычно включают:
радиотехническое оборудование (передатчики навигационных сигналов и телеметрической информации, приемники данных и команд от КИК, антенны, блоки ориентации), ЭВМ, бортовой эталон времени и частоты (БЭВЧ), солнечные батареи и т. д. Бортовые эталоны времени и частоты обеспечивают практически синхронное излучение навигационных сигналов всеми спутниками, что необходимо для реализации режима пассивных дальномерных измерений в аппаратуре потребителей.
Навигационные сигналы спутников содержат дальномерные компоненты и компоненты служебных сообщений. Первые используют для определения в аппаратуре потребителей СРНС навигационных параметров (дальности, ее производных, ПВК и т. д.), вторые — для передачи потребителям координат спутников, векторов их скоростей, времени и др. Основная часть служебных сообщений спутника подготовлена в наземном командно-измерительном комплексе и передана по радиолинии на борт спутника. И только небольшая их часть формируется непосредственно бортовой аппаратурой.
Дальномерные компоненты навигационных сигналов содержат две составляющие, отличающиеся обеспечиваемой ими точностью навигационных определений (стандартной и более высокой). В аппаратуре гражданских потребителей обрабатывается сигнал стандартной точности. Для использования сигнала высокой точности требуется санкция военных органов.
Выбор состава и конфигурации орбитальной группировки НС может обеспечить заданную рабочую зону, возможность реализации различных методов навигационно-временных определений (НВО), непрерывность и точность НВО, диапазон изменения параметров радиосигналов НС и т. д. Например, увеличение высоты полета НС современных средневысотных СРНС до примерно 20 000 км позволяет принимать сигналы каждого НС на значительных территориях (приблизительно на половине поверхности Земли). И тогда несколько НС, расположенных на определенных орбитах, могут формировать сплошное, с точки зрения наземного и авиационного потребителя, радионавигационное поле (глобальную рабочую зону).
Соответствующие характеристики сигналов НС и способы их обработки позволяют проводить навигационные измерения с высокой точностью.
В современных СРНС типа ГЛОНАСС и GPS большое внимание уделяется взаимной синхронизации НС по орбитальным координатам и излучаемым сигналам, что обусловило применение к ним термина "сетевые СРНС".
2.2. Наземный командно-измерительный комплекс
Подсистема контроля и управления представляет собой комплекс наземных средств (командно-измерительный комплекс — КИК), которые обеспечивают наблюдение и контроль за траекториями движения НС, качеством функционирования их аппаратуры; управление режимами ее работы и параметрами спутниковых радиосигналов, составом, объемом и дискретностью передаваемой со спутников навигационной информации, стабильностью бортовой шкалы времени и др.
Обычно КИК состоит из координационно-вычислительного центра, (КВЦ), станций траекторных измерений и управления (СТИ), системной (наземного) эталона времени и частоты (СЭВЧ).
Периодически при полете НС в зоне видимости СТИ, происходит наблюдение за спутником, что позволяет с помощью КВЦ определять и прогнозировать координатную и другую необходимую информацию. Затем эти данные вкладывают в память бортовой ЭВМ и передают потребителям в служебном сообщении в виде кадров соответствующего формата.
Синхронизация различных процессов в СРНС обеспечивается с помощью высокостабильного (атомного) системного эталона времени и частоты, который используется, в частности, в процессе юстировки бортовых эталонов времени и частоты навигационных спутников СРНС.
2.3. Навигационная аппаратура потребителей СРНС
Приемоиндикаторы СРНС, состоящие из радиоприемника и вычислителя, предназначены для приема и обработки навигационных сигналов спутников с целью определения необходимой потребителям информации (пространственно-временных координат, направления и скорости, пространственной ориентации и т. п.).
Пространственное положение потребителя обычно определяется в приемоиндикаторе в два этапа: сначала определяются текущие координаты спутников и первичные навигационные параметры (дальность, ее производные и др.) относительно соответствующих НС, а затем рассчитываются вторичные — географическая широта, долгота, высота потребителя и т. д.
Сравнение текущих координат потребителей с координатами выбранных навигационных точек (точек маршрута, реперов и т. п.) позволяет сформировать в ПИ сигналы для управления различными транспортными средствами. Вектор скорости потребителя вычисляют путем обработки результатов измерений доплеровских сдвигов частоты сигналов НС с учетом известного вектора скорости спутника. Для нахождения пространственной ориентации потребителя в приемоиндикаторе СРНС осуществляются разностные измерения с использованием специальных антенных решеток.
2.4. Взаимодействие подсистем СРНС в процессе определения текущих координат спутников
Способ функционирования современных СРНС позволяет отнести их к радиомаячным навигационным средствам. Однако необходимость постоянного определения текущих координат НС и выбора из них видимых потребителю НС и рабочего созвездия исправных НС существенно отличает СРНС от традиционных радиомаячных РНС (РСБН, РСДН), в которых координаты радиомаяков известны и постоянны. Непрерывное нахождение текущих координат НС, движущихся с большими изменяющимися но времени скоростями, представляет собой сложную задачу.
Координаты НС могут быть определены в общем случае на КИК или непосредственно на спутнике (самоопределяющиеся НС). В настоящее время отдается предпочтение первому подходу. Это связано с тем, что существуют хорошо апробированные на практике методы и средства решения этой проблемы в наземных условиях. В современных СРНС управление НС осуществляется с ограниченных территорий и, следовательно, не обеспечивается постоянное взаимодействие КИК и сети НС. В связи с этим выделяют два этапа решения этой задачи. На первом этапе в аппаратуре КИК измеряют координаты спутников в процессе их пролета в зоне видимости и вычисляют параметры их орбит. Эти данные прогнозируются на фиксированные (опорные) моменты времени, например на середину каждого получасового интервала предстоящих суток, до выработки следующего прогноза. Спрогнозированные координаты НС и их производные (эфемериды) передаются на НС, а затем в виде навигационного (служебного) сообщения, соответствующего указанным моментам времени, потребителям. На втором этапе в аппаратуре потребителя по этим данным осуществляется последующее прогнозирование координат НС, т. е., вычисляются текущие координаты НС в интервалах между опорными точками траектории. Процедуры первичного и вторичного прогнозирования координат проводят при известных закономерностях движения НС.
В отличие от самоопределяющихся НС, рассмотренный вариант функционирования СРНС обеспечивает упрощение аппаратуры спутников за счет усложнения структуры КИК с целью достижения заданной надежности.
Заметим, что в навигационное сообщение НС КИК, кроме того, закладывает альманах — набор справочных сведений о всей сети НС, в том числе загрубленные эфемериды НС, которые обычно используются для определения видимых потребителю НС и выбора рабочего созвездия, обеспечивающего высокое качество НВО. Темп обновления точной эфемеридной информации (ЭИ) значительно выше, поэтому ее часто называют оперативной ЭИ в отличие от долговременной ЭИ в альманахе.
3. Основные навигационные характеристики НС
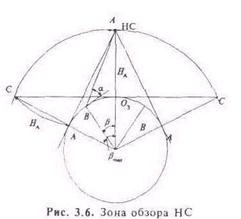
К основным навигационным характеристикам НС относят зону обзора, зону видимости, продолжительность наблюдения, орбитальную конфигурацию сети НС и др. На чертеже (рис. 2) поясняются основные определения.
Зона обзора НС представляет собой участок земной поверхности, на котором можно осуществлять наблюдение за НС, прием его сигналов. Центром зоны обзора является подспутниковая точка О3, называемая географическим местом спутника (ГМС).
Координаты ГМС (географические широта и долгота) могут быть рассчитаны по формулам:
![]()
где ![]() — орбитальные элементы НС;
— орбитальные элементы НС; ![]() — гринвичское звездное время;
— гринвичское звездное время;
![]() — угловая скорость прецессии узла
орбиты. Зона обзора ограничена линией истинного горизонта в точке НС, поэтому
ее размер зависит от высоты НС (
— угловая скорость прецессии узла
орбиты. Зона обзора ограничена линией истинного горизонта в точке НС, поэтому
ее размер зависит от высоты НС (![]() ). Размер зоны обзора характеризуется углом
). Размер зоны обзора характеризуется углом ![]() или соответствующей ему дугой АО3,
которая называется радиусом зоны обзора
или соответствующей ему дугой АО3,
которая называется радиусом зоны обзора ![]() [км]. Из рис. 2 видно, что
[км]. Из рис. 2 видно, что
|
|
![]() (1)
(1)
Бортовые приемоиндикаторы СРНС
обеспечивают заданную точность измерений в зоне обзора, ограниченной радиогоризонтом,
который поднят для пользователя на угол 5 ... 10° (угол маски). В этом случае зона обзора определяется
углом ![]() , где
, где
![]() (2)
(2)
Площадь зоны
обзора ![]() . Тогда относительная площадь обзора
. Тогда относительная площадь обзора ![]() , где
, где ![]() - площадь земного
шара.
- площадь земного
шара.
При увеличении
высоты НС до ![]() 40 000 км радиус зоны обзора изменяется
незначительно (
40 000 км радиус зоны обзора изменяется
незначительно (![]() 9 400 км), а затраты
на формирование такой орбиты возрастают существенно.
9 400 км), а затраты
на формирование такой орбиты возрастают существенно.
Рассмотренная выше зона обзора соответствует фиксированному моменту времени (мгновенная зона обзора).
У нестационарных НС мгновенная зона
обзора, перемещаясь по поверхности Земли, образует зону обзора в виде полосы
шириной ![]() .
Ее осью является совокупность ГМС - трасса НС.
.
Ее осью является совокупность ГМС - трасса НС.
Установим
условия видимости НС для наблюдателя, расположенного в точке ![]() , лежащей на трассе НС
(рис. 3). Область небосвода СС’, в которой
, лежащей на трассе НС
(рис. 3). Область небосвода СС’, в которой
|
|

НС наблюдается из точки ![]() ; от момента восхода
; от момента восхода ![]() над горизонтом до момента захода
над горизонтом до момента захода ![]() называют зоной видимости (геометрической
зоной видимости), для которой справедливы соотношения (1), (2). Из рис. 3
видно, что максимальный угловой радиус зоны видимости (дуга А'С')
называют зоной видимости (геометрической
зоной видимости), для которой справедливы соотношения (1), (2). Из рис. 3
видно, что максимальный угловой радиус зоны видимости (дуга А'С')
![]()
С учетом радиогоризонта угловой радиус зоны обзора
уменьшается ![]() . Здесь угол
a называют минимально допустимой высотой.
. Здесь угол
a называют минимально допустимой высотой.
Продолжительность сеанса связи с НС ![]() (в пределах видимости НС) определяется разностью (
(в пределах видимости НС) определяется разностью (![]() ) и зависит от угла b (т. е. от
высоты полета НС или периода его обращения Т).
) и зависит от угла b (т. е. от
высоты полета НС или периода его обращения Т).
Для круговой орбиты
![]() , где
, где ![]() — угловая скорость обращения
спутника.
— угловая скорость обращения
спутника.
Для СРНС ГЛОНАСС
![]() км,
км, ![]() % при
% при ![]() км,
км, ![]() ;
; ![]() » 300 мин.
» 300 мин.
Очевидно, что если потребитель находится в стороне от трассы НС, то продолжительность наблюдения спутника уменьшается.
Навигационные алгоритмы, реализованные в бортовых приемоиндикаторах современных СРНС, обычно ориентированы на прием сигналов от нескольких НС одновременно. Наблюдение в любой точке рабочей зоны СРНС одновременно нескольких НС обеспечивается путем оптимального выбора стабильной пространственно-временной структуры (конфигурации) сети НС — числа, ориентации и формы орбит; числа НС на каждой из них; взаимного расположения орбит и спутников на них. Обычно число НС в сети превышает минимально необходимое за счет резервных НС.
4. Решение навигационной задачи
Основным содержанием навигационной
задачи (НЗ) в СРНС является определение пространственно-временных координат потребителя,
а также составляющих его скорости, поэтому в результате решения навигационной
задачи должен быть определен расширенный вектор состояния потребителя П,
который в инерциальной системе координат можно представить в виде ![]() . Элементами данного вектора служат
пространственные координаты (х, у, z) потребителя, временная поправка t' шкалы времени потребителя относительно системной ШВ,
а также составляющие вектора скорости
. Элементами данного вектора служат
пространственные координаты (х, у, z) потребителя, временная поправка t' шкалы времени потребителя относительно системной ШВ,
а также составляющие вектора скорости ![]() .
.
Элементы вектора потребителя недоступны
непосредственному измерению с помощью радиосредств. У принятого радиосигнала
могут измеряться те или другие его параметры, например задержка или доплеровское
смещение частоты. Измеряемый в интересах навигации параметр радиосигнала
называют радионавигационным (РНП), а соответствующий ему геометрический
параметр — навигационным (НП), поэтому задержка сигнала t и его доплеровское смещение частоты ![]() являются
радионавигационными параметрами, а соответствующие им дальность до объекта Д
и радиальная скорость сближения объектов
являются
радионавигационными параметрами, а соответствующие им дальность до объекта Д
и радиальная скорость сближения объектов ![]() служат
навигационными параметрами. Связь между этими параметрами дается соотношениями:
служат
навигационными параметрами. Связь между этими параметрами дается соотношениями:
![]()
де с — скорость света; l — длина волны излучаемого НС сигнала.
Геометрическое место точек пространства с одинаковым значением навигационного параметра называют поверхностью положения. Пересечение двух поверхностей положения определяет линию положения — геометрическое место точек пространства, имеющих два определенных значения двух навигационных параметров. Местоположение определяется координатами точки пересечения трех поверхностей положения или двух линий положения. В ряде случаев (из-за нелинейности) две линии положения могут пересекаться в двух точках. При этом однозначно найти местоположение можно, только используя дополнительную поверхность положения или иную информацию о местоположении объекта.
Для решения навигационной задачи, т. с. для нахождения вектора потребителя П, используют функциональную связь между навигационными параметрами и компонентами вектора потребителя. Соответствующие функциональные зависимости принято называть навигационными функциями. Конкретный вид навигационных функций обусловлен многими факторами: видом НП, характером движения НС и потребителя, выбранной системой координат и т.д.
Навигационные функции для пространственных координат потребителя можно определить с помощью различных разновидностей дальномерных, разностно-дальномерных, угломерных методов и их комбинаций. Для получения навигационных функций, включающих составляющие вектора скорости потребителя, используют радиально-скоростные методы.
5. СРНС ГЛОНАСС
5.1. Структура и основные характеристики
Отечественная сетевая среднеорбитальная СРНС ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система) предназначена для непрерывного и высокоточного определения пространственного (трехмерного) местоположения вектора скорости движения, а также времени космических, авиационных, морских и наземных потребителей в любой точке Земли или околоземного пространства. В настоящее время она состоит из трех подсистем:
· подсистема космических аппаратов (ПКА), состоящая из навигационных спутников ГЛОНАСС на соответствующих орбитах;
· подсистема контроля и управления (ПКУ), состоящая из наземных пунктов контроля и управления;
· аппаратуры потребителей (АП).
Навигационные определения в ГЛОНАСС осуществляются на основе опросных измерений в аппаратуре потребителей псевдодальности и радиальной псевдоскорости до четырех спутников (или трех спутников при использовании дополнительной информации) ГЛОНАСС, а также с учетом принятыx навигационных сообщений этих спутников. В навигационных сообщениях, передаваемых с помощью спутниковых радиосигналов, содержится информация о различных параметрах, в том числе и необходимые сведения о положении и движении спутников в соответствующие моменты времени. В результате обработки этих данных в АП ГЛОНАСС обычно определяются три (две) координаты потребителя, величина и направление вектора его земной (путевой) скорости, текущее время (местное или в шкале Госэталона Координированного Всемирного Времени UTC(SU) или, по другому, UТC(ГЭВЧ) (ГЭВЧ — Государственный эталон времени и частоты). Основные характеристики СРНС ГЛОНАСС приведены в табл. 1 — 2, где для сравнения приведены сведения об американской срсдневысотной СРНС GPS. В табл. 1 приведены общесистемные характеристики СРНС ГЛОНАСС. В табл. 2 приведены как стандартные значения характеристик СРНС, так и их оценки на основе данных, полученных в 1993—1995 гг. Последние показаны в скобках, причем для С/А-кода, кода стандартной точности) значения приводятся для вариантов работы с А/без SA (SA — Selective Availability — селективный доступ) ).
Таблица 1. Системные характеристики СРНС ГЛОНАСС
Параметр, способКруговая (е =0±0,01) |
Круговая | |
| Высота орбит, км | 19100 | 20145 |
| Наклонение орбит, 1рад | 64,8±0,3 | 55 (63) |
| Драконический период обращения НС | 11ч 15 мин 44 с ±5 с | 11 ч 56,9 мин |
| Способ разделения сигналов НС | Частотный | Кодовый |
| Несущие частоты навигационных радиосигналов МГц: | ||
|
L1 |
1602,5625...1615,5 | 1575.42 |
|
L2 |
1246,4375...1256,5 | 1227,6 ! |
| Период повторения ПСП | 1 мс | 1 мс (С/А-код) |
| (дальномерного кода или его сегмента) | 7 дн (Р-код) | |
| Тактовая частота ПСП, МГц | 0,511 | 1,023 (С/А-код) |
| 10,23 (P,Y-код) | ||
| Скорость передачи цифровой информации | ||
| (соответственно СИ- и D- код), бит/с | 50 | 50 |
| Длительность суперкадра, мин | 2,5 | 12,5 |
| Число кадров в суперкадре | 5 | 25 ; |
| Число строк в кадре | 15 | 5 |
| Система отсчетов времени | UTC(SU) | UTC(USNO) . |
| Система отсчета пространственных | ||
| координат | ПЗ-90 | WGC-84 |
| Тип эфемерид | Геоцентрические | Модифициро- |
| координаты и их | ванные кепле- | |
| производные | ровы элементы |
Таблица 2. Точностные характеристики СРНС |
||||||
| Параметр | Точность измерений | |||||
|
GPS (P=0,95) |
ГЛОНАСС (P=0,997) |
|||||
| Горизонтальная плоскость, м |
100 (72/18) 300 (Р=0.9999) 18 |
(С/А-код) (С/А-код) (Р-, Y-код! | 60 (СТ-код) (39) | |||
| Вертикальная плоскость, м |
156 28 |
(135/34) | (С/А-кол) (Р-, Y-код) | 75 (СТ-код) (67,5) | ||
| Скорость, см/с |
< 200 20 |
(С/А-код ) (Р-. Y-код) | 15 (С'1-код) | |||
|
Ускорение, мм/с2 |
8 <19 |
(С/А-код) (С/А-код ) | — | |||
| Время, мкс |
0,34 0,18 код) |
(С/А-код ) (Р-, Y- | 1 (CI-код) | |||
5.2. Назначение и состав подсистемы контроля и управления
Наземный сегмент системы ГЛОНАСС — подсистема контроля и упрощения (ПКУ), предназначена для контроля правильности функционирования правления и информационного обеспечения сети спутников системы ГЛОНАСС, состоит из следующих взаимосвязанных стационарных элементов: центр управления системой ГЛОНАСС (ЦУС); центральный синхронизатор (ЦС); контрольные станции (КС); система контроля фаз (СКФ); кванто-оптические станции (КОС); аппаратура контроля поля (АКП).
Наземный сегмент выполняет следующие функции:
· проведение траекторных измерений для определения и прогнозировании непрерывного уточнения параметров орбит всех спутников;
· временные измерения для определения расхождения бортовых шкал времени всех спутников с системной шкалой времени ГЛОНАСС, синхронизации спутниковой шкалы времени с временной шкалой центрального синхронизатора и службы единого времени путем фазирования и коррекции бортовых шкал времени спутников;
· формирование массива служебной информации (навигационных сообщений), содержащего спрогнозированные эфемериды, альманах и поправки к бортовой шкале времени каждого спутника и другие данные, необходимые для формирования навигационных кадров;
· передача (закладка) массива служебной информации в память ЭВМ каждого спутника и контроль за его прохождением;
· контроль по телеметрическим каналам за работой бортовых систем спутников и диагностика их состояния;
· контроль информации в навигационных сообщениях спутника, прием сигнала вызова ПКУ;
· управление полетом спутников и работой их бортовых систем путем выдачи на спутники временных программ и команд управления; контроль прохождения этих данных; контроль характеристик навигационного поля;
· определение сдвига фазы дальномерного навигационного сигнала спутника по отношению к фазе сигнала центрального синхронизатора;
планирование работы всех технических средств ПКУ, автоматизированная обработка и передача данных между элементами ПКУ.
В автоматизированном режиме решаются практически все основные задачи управления НС и контроля навигационного поля.
5.2.1 Центр управления системой
Центр управления системой соединен каналами автоматизированной и неавтоматизированной связи, а также линиями передачи данных со всеми элементами ПКУ, планирует и координирует работу всех средств ПКУ на основании принятого для ГЛОНАСС ежесуточною режима управления спутниками в рамках технологического цикла управления. При этом ЦУС собирает и обрабатывает данные для прогноза эфемерид и частотно-временных оправок, осуществляет с помощью, так называемого, баллистического центра расчет и анализ пространственных характеристик системы, анализ баллистической и структуры и расчет исходных данных для планирования работы элементов ПКУ.
Информацию, необходимую для запуска спутников, расчета параметров орбитального движения, управления ими в полете, ЦУС получает от системы единого времени и эталонных частот, системы определения параметров вращения Земли, системы мониторинга гелио- и геофизизической обстановки.
Центральный синхронизатор, взаимодействуя с ЦУС, формирует шкалу времени ГЛОНАСС, которая используется для синхронизации процессов и теме, например, в системе контроля фаз. Он включает в свой состав группу однородных стандартов.
5.2.2. Контрольные станции
Контрольные станции (станции управления, измерения и кон ля или наземные измерительные пункты) по принятой схеме радиоконтроля орбит осуществляют сеансы траёкторных и временных измерений, необходимых для определения и прогнозирования пространственного положения спутников и расхождения их шкал времени с временной шкалой ГЛОНАСС, а также собирают телеметрическую информацию о состоянии бортовых систем спутников. С их помощью происходит закладка в бортовые ЭВМ спутников массивов служебной информации (альманах, эфемериды, частотно-временные поправки и др.), временных программ и оперативных команд для управления новыми системами.
Траекторные измерения осуществляются с помощью радиолокационных станций, которые определяют запросным способом дальность до спутников и начальную скорость. Дальномерный канал характеризуется максимальной ошибкой около 2 ... 3 м. Процесс измерения дальности до спутника совмещают по времени с процессом закладки массивов служебной информации, временных программ и команд управления, со съемом телеметрических данных спутника.
Для эфемеридного обеспечения с КС в ЦУС ежесуточно выдается по каждому спутнику по 10 ... 12 наборов (сеансов) измеренных текущих навигационных параметров объемом примерно 1 Кбайт каждый.
В настоящее время для обеспечения работ ГЛОНАСС могут использоваться КС, рассредоточенные по всей территории России. Часть КС других элементов наземного сегмента ГЛОНАСС осталась вне территории России (в странах СНГ) и может быть использована лишь при наличии соответствующих договоренностей. Размещение сети КС выбрано с учетом существующей инфраструктуры управления НС и из условий надежного решения задач траекторных измерений для всей орбитальной группировки.
Такая сеть КС обеспечивает закладку на спутники системы 1 раз/сут высокоточных эфемерид и временных поправок (возможна закладка 2 раз/сут).
В случае выхода из строя одной из станций возможна ее равноценная замена другой, так как сеть КС обладает достаточной избыточностью и в наихудшей ситуации работу системы может обеспечивать ЦУС и одна станция, однако интенсивность ее работы будет очень высокой.
При планировании работы КС на сутки определяются основные и резервные станции для проведения сеансов измерений с необходимой избыточностью. Контрольные станции имеют тройное резервирование по аппаратуре (один комплект рабочий, второй — в резерве, третий — профилактические работы). Коэффициент готовности средств ПКУ в сеансе измерений и закладки информации на борт спутника близок к единице.
Описанная сеть КС отличается от аналогичной структуры СРНС GPS тем, что обеспечивает высокое качество управления орбитальной группировкой только с национальной территории. КС ГЛОНАСС могут использоваться для обеспечения функционирования других космических средств.
5.2.3. Эфемеридное обеспечение
Эфемеридное обеспечение поддерживается комплексом технических и программных средств, выполняющих радиоконтроль орбит спутников с нескольких наземных КС, обработку результатов траекторных измерений и рас эфемеридной информации (ЭИ), передаваемой далее с помощью загрузочных станций на спутник.
Высокая точность расчета эфемерид обеспечивается соответствующей точностью измерительных средств, внесением поправок на выявленные методических траекторных измерений, но и накапливаемых за недельный срок. При этом дальномерные данные, получаемые от станций слежения за спутниками, периодически калибруются, что обеспечивает высокое качество траекторных измерений в системе ГЛОНАСС.
Предполагается, что такие традиционные методы управления будут использоваться до 2000 г. В дальнейшем будет осуществляться переход на новые технологии, включающие межспутниковые угломерно-дальномерные измерения, что обеспечит качественный скачок в координатно-временном обеспечении потребителей.
5.2.4. Особенности формирования эфемеридной информации в ГЛОНАСС
Система ГЛОНАСС создавалась в условиях, когда уровень фундаментальных исследований в области геодезии, геодинамики и геофизики не обеспечивал требуемую точность эфемеридного обеспечения системы. В этих условиях был проведен комплекс работ по обоснованию путей решения этой проблемы через построение согласующих моделей движения спутников, параметры которых определяют в процессе решения самой задачи баллистико-навигационного обеспечения системы.
Исследования показали, что необходимо отказаться от типовых остро-резонансных (например, с периодом обращения спутника равным 12 ч, как в СРНС GPS, когда период вращения Земли вокруг своей оси равен двум периодам обращения спутника) орбит спутников, так как в процессе моделирования уравнений траекторного движения спутников это повышает устойчивость их решений и ослабляет корреляции между параметрами отдельных уравнений (моделирующих, например, изменение геопотенциала, координат измерительных средств, радиационного давления). Кроме того, оказалось, что наивысшая точность баллистико-эфемеридного обеспечения системы при решении многомерной навигационной задачи с расширенным вектором состояния обеспечивается при обработке измеренных текущих навигационных параметров на интервале 8 сут. Переход от острорезонансных орбит был осуществлен путем „увеличения числа витков спутника (по сравнению с GPS) на интервале 8 сут до 16 ... 17. Число спутников в системе выбрано равным 24 с равномерным распределением по трем орбитальным плоскостям. Все спутники системы фазируются таким образом, что на больших временных интервалах они имеют один след на поверхности Земли. Это обеспечивает высокую баллистическую устойчивость системы и относительно высокую точность и простоту расчетов траекторий. Опыт эксплуатации системы показал, что при обеспечении начального периода обращения спутника с точностью не хуже 0,1 с на протяжении заданного срока активного существования спутника его положение в системе корректировать не нужно.
В настоящее время в системе ГЛОНАСС используется запросная технология эфемеридного обеспечения, когда исходной информацией для расчета эфемерид служат данные измеренных текущих параметров (ИТП) спутников, поступающие в ЦУС от контрольных станций по программам межмашинного обмена через вычислительную сеть. Ежесуточно осуществляется 10 ... 12 сеансов передачи информации по каждому спутнику.