Реферат: Обзор методов и способов измерения физико-механических параметров рыбы
Калининградский Государственный Технический Университет
Реферат по дисциплине
Метрология и стандартизация
на тему:
«Обзор методов и способов измерения физико-механических параметров рыбы»
Выполнил:
Студент группы 01-АС-2
Хворостов К. А.
Калининград 2004
Содержание:
ПРЕДИСЛОВИЕ.. 3
УСТАНОВКИ ДЛЯ ИССЛЕДОВАНИЯ КОЭФФИЦИЕНТОВ ТРЕНИЯ.. 3
КОЭФФИЦИЕНТЫ ТРЕНИЯ РЫБ.. 8
ЭКСПЕРИМЕНТАЛЬНЫЕ ДАННЫЕ О КОЭФФИЦИЕНТАХ ТРЕНИЯ РЫБ.. 9
РЕОЛОГИЧЕСКИЕ СВОЙСТВА РЕАЛЬНЫХ ТЕЛ.. 12
МЕХАНИЧЕСКИЕ МОДЕЛИ, ОПИСЫВАЮЩИЕ РЕОЛОГИЧЕСКИЕ СВОЙСТВА РЕАЛЬНОГО ТЕЛА.. 13
СТРУКТУРНО МЕХАНИЧЕСКИЕ СВОЙСТВА РЫБЫ... 15
ОПРЕДЕЛЕНИЕ СВОЙСТВ ТЕЛА ПО РЕОЛОГИЧЕСКИМ ХАРАКТЕРИСТИКАМ... 17
ОПРЕДЕЛЕНИЕ МОДУЛЯ УПРУГОСТИ И КОЭФФИЦИЕНТА ДИНАМИЧЕСКОЙ ВЯЗКОСТИ ТЕЛА РЫБ.. 18
ЖЕСТКОСТЬ РЫБЫ... 19
ИССЛЕДОВАНИЕ УСИЛИЙ ОТРЫВА ВНУТРЕННОСТЕЙ РЫБ.. 23
ЛИНЕЙНЫЕ И ВЕСОВЫЕ ХАРАКТЕРИСТИКИ РЫБ ОПРЕДЕЛЕНИЕ МОРФОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК РЫБ. 24
ПРЕДИСЛОВИЕ
Для создания и внедрения комплексно-механизированных линий по обработке, фасовке и упаковке рыбы и морепродуктов, а также разработки принципиально нового рыбообрабатывающего оборудования на основе достижений науки и техники необходимо располагать данными о физико-механических, реологических, прочностных и морфометрических характеристиках рыб.
В связи с изменением видового состава сырья возникает необходимость в создании высокопроизводительного универсального оборудования. Новые промысловые виды рыб отличаются от традиционных видов, как по форме, так и по структурно-механическим характеристикам, поэтому требуется новый подход к созданию рыбообрабатывающих машин.
В процессе обработки рыбы происходит взаимодействие между рыбой и рабочими органами машин, а, следовательно, на рыбу действуют силы трения и силы, вызывающие ее деформацию. Под действием этих сил в теле рыбы возникают напряжения. Без знания закономерностей изменений фрикционных характеристик рыб, деформаций и напряжений в теле рыбы, невозможно выполнить теоретические расчеты, связанные с проектированием рыбообрабатывающего оборудования. Установление таких закономерностей связано с изучением фрикционных, реологических и прочностных характеристик рыб.
Знание фрикционных, реологических и прочностных свойств сырья позволяет решать не только конструкторские, но и технологические задачи, направленные на повышение производительности труда и улучшение качества продукции.
Линейные и морфометрические характеристики рыб, а также координаты центра тяжести и плотность рыб являются необходимыми данными для конструирования рыбообрабатывающего оборудования и могут быть использованы для оптимизации технологических процессов.
Определением линейных и морфометрических характеристик рыб занимались практически все бассейновые научно-исследовательские институты и некоторые конструкторские бюро, однако нет единой методики обработки экспериментальных данных.
УСТАНОВКИ ДЛЯ ИССЛЕДОВАНИЯ КОЭФФИЦИЕНТОВ ТРЕНИЯ
Исходя из общепринятых требований, конструкция экспериментальной установки для исследования коэффициентов трения рыб должна быть как можно проще и вместе с тем гарантировать достаточную надежность полученных результатов.
Существует несколько различных схем экспериментальных установок для исследования коэффициентов трения покоя и кинетических коэффициентов трения рыб по твердым поверхностям. Довольно широкое распространение в рыбной промышленности получил способ определения коэффициентов трения посредством движения рыбы по наклонной плоскости. Однако результаты, полученные этим способом, нельзя считать достоверными, поскольку трудно учесть продолжительность неподвижного контакта рыбы с плоскостью, при этом деформация тела рыбы происходит под действием нормальной составляющей силы тяжести и, следовательно, отличается от деформации тела рыбы, находящейся на горизонтальной плоскости. Деформация тела рыбы связана непосредственно с площадью фрикционного контакта, от которой зависит сила трения. Следовательно, данные, полученные на установке с наклонной и горизонтальной плоскостями, будут различными.
Для исследования коэффициентов трения покоя чаще всего применяются установки двух видов: установки, в которых перемещается рыба, и установки, в которых перемещается исследуемая поверхность. Для исследования кинетических коэффициентов трения необходимо, чтобы скорость относительного перемещения рыбы изменялась в широком диапазоне.
Фиксирующая часть установки должна обеспечивать запись всего процесса трения на пленку или ленту. Такая запись позволяет проанализировать процесс трения, а также установить характер и сущность взаимодействий между рыбой и исследуемым материалом.
Запись процесса трения можно осуществить, если в качестве измерительного устройства использовать упругий элемент с небольшой жесткостью и фиксировать непосредственно перемещение упругого элемента или же выбрать упругий элемент значительной жесткости и его деформацию записывать посредством тензодатчиков, усилителя и шлейфового осциллографа. Запись процесса трения посредством тензодатчиков является наиболее приемлемой, поскольку можно изменять чувствительность тензодатчиков в широком диапазоне посредством тензоусилителя.
Установки для исследования коэффициентов трения покоя.
Схема установки для определения коэффициентов трения покоя представлена на рис. 1. На столе 1 установлены направляющие 2, по которым перемещается тележка 3. Перемещение те лежки осуществляется приводной станцией посредством гибкой нити. Приводная станция состоит из двигателя постоянного тока 4 и редуктора 5. На выходной вал редуктора насажен шкив 6. Один конец нити закреплен к тележке, а другой к шкиву. Гибкая нить наматывается на шкив и перемещает тележку. На тележку укладывают исследуемый материал, с которым кон тактирует рыба.
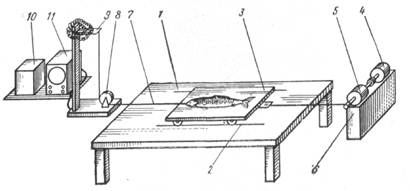
Рис. 1. Экспериментальная установка для исследования коэффициентов трения покоя.
Гибкая нить 7 одним концом закрепляется к рыбе, огибает блок 8, а другим концом крепится к пружинной балке 9 с наклеенными с двух сторон тензодатчиками.
При включении двигателя тележка перемещается, а рыба остается неподвижной. Под действием силы, необходимой для сдвига рыбы с места, пружинная балка деформируется, и сигнал от тензодатчиков через тензоусилитель 8АНЧ-7М 10 записывается осциллографом К-24 11.
Размеры пружинных балок выбирают в зависимости от предполагаемой величины измеряемой силы. Нами применялись четыре сменные пружинные балки со следующими размерами (δ —толщина балки, мм; b — ширина балки, мм; l — вы лет балки, мм):
| δ = 2 мм; |
b = 51 мм; |
l = 63 мм; |
| δ =1,2 мм; |
b= 17 мм; |
l = 90 мм; |
| δ = 1 мм; |
b = 11 мм; |
l = 62 мм; |
| δ = 0,5 мм; |
b = 11 мм; |
l = 50 мм. |
Установки для исследования кинетических коэффициентов трения рыб.
Под кинетическим коэффициентом трения рыб понимается коэффициент трения скольжения рыб по соответствующему материалу.
В рыбообрабатывающих и транспортирующих машинах рыба перемещается относительно рабочих органов и поэтому при проектировании новых, а также при исследовании существующих машин для определения оптимальных параметров необходимо располагать данными о силах трения скольжения.
Конструкция экспериментальной установки должна обеспечивать возможность определения коэффициента трения скольжения между рыбой и соответствующей поверхностью. В связи с тем, что сила трения зависит от скорости, коэффициент трения скольжения будем называть кинетическим коэффициентом Трения. Под кинетическим коэффициентом трения понимают отношений силы трения скольжения при установившейся скорости движения к силе нормального давления рыбы на плоскость.
Кинетические коэффициенты трения рыб можно исследовать на специальных установках, описанных ниже. Первые две аналогичны установкам, применяемым для исследования трения покоя. На этих установках можно исследовать кинетические коэффициенты трения при малых скоростях скольжения. При скоростях скольжения свыше 0,1 м/с выполнить соответствующие исследования невозможно, поскольку длина плоскости скольжения практически не превышает 1 м и за столь короткий период времени не успевает сформироваться фрикционный контакт, а, следовательно, сила трения скольжения будет величиной переменной.
При скоростях скольжения свыше 0,1 м/с исследования силы трения скольжения проводились на установке с вращающимся диском и установке «Экспресс».
Установка с вращающимся диском. Схема установки представлена на рис. 2. Установка состоит из электродвигателя постоянного тока 1, который через приводную станцию 2 вращает диск 3. Приводная станция состоит из червячного цилиндрического редуктора и ременной передачи со сменными шкивами. На кронштейне 4 консольно закреплена пружинная балка 5 с двумя наклонными тензодатчиками 6. Гибкая нить 7 крепится к пружинной балке 5, огибает направляющий блок 8 и другим концом крепится к рыбе. Диаметр сменных дисков 3 равен 1 м. Они могут изготовляться из различных материалов (нержавеющая сталь, оргстекло, винипласт, прорезиненная лента и т. д.).
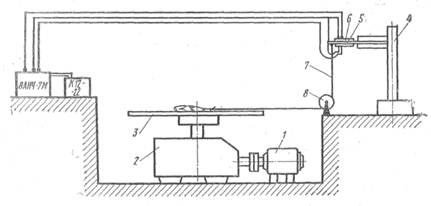
Рис. 2. Установка с вращающимся диском для исследования кинетических коэффициентов трения.
В процессе проведения эксперимента сила трения между рыбой, находящейся в неподвижном состоянии, и материалом вращающегося диска передается через гибкую нить на пружинную балку с тензодатчиками, далее сигнал поступает на тензостанцию и записывается шлейфовым осциллографом. Скорость вращения диска регулируется путем изменения напряжения в обмотке возбуждения двигателя и сменных шкивов ременной передачи. На установках такого типа можно исследовать силы трения при скоростях скольжения от 0,1 до 2 м/с. Преимущество установки этого типа заключается в том, что при сравнительно небольших габаритах они позволяют исследовать силу трения между рыбой и соответствующим материалом в широком диапазоне скоростей скольжения. Однако установка, имеет и недостатки. Рыба, уложенная в процессе эксперимента на вращающийся диск, находится в неподвижном состоянии, поэтому не подвержена воздействию центробежных сил. Однако траектория относительного перемещения отдельных точек тела рыбы состоит из окружностей разного диаметра, и, по-видимому, элементарные силы трения будут в различных точках иметь разные направления. В связи с этим необходимо исследовать погрешности, допускаемые при замере суммарной величины силы трения.
Установка «Экспресс». Разработана С. И. Брилем и состоит из движущейся наклонной плоскости, к которой крепится соответствующий материал 1 (рис. 3). Исследуемый образец (или рыба) является звеном параллелограммного четырехзвенного механизма ABCD. Звенья механизма 3 и 4 являются гибкими нитями. Плоскость движения механизма параллельна плоскости 1. При исследовании трущейся пары плоскость 1 перемещается в направлении х—х с постоянной скоростью υ. Между плоскостью 1 и исследуемым образцом 2 возникает сила трения, увлекающая за собой образец 2.
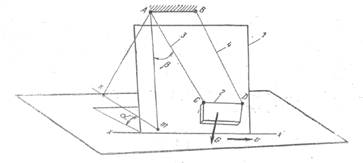
Рис. 3. Схема установки «Экспресс»
При этом гибкие звенья четырехзвенного параллелограмма отклоняются от плоскости АтК на угол β. Сила тяжести образца G стремится вернуть образец 2 в исходное положение. В некотором положении нитей наступает равновесие механизма. Угол отклонения нитей в этом положении β пропорционален коэффициенту трения. Плоскость АтК перпендикулярна плоскости KmX и параллельна силе тяжести G. Силы, действующие в установке, изображены на рис. 4.
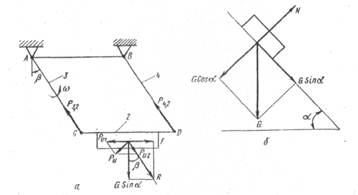
Рис. 4. Силы, действующие в установке «Экспресс»:
а – фронтальная плоскость; б – нормальная плоскость
КОЭФФИЦИЕНТЫ ТРЕНИЯ РЫБ
Коэффициенты трения покоя рыб.
Опыты по определению коэффициентов трения покоя различных видов рыб по поверхностям из различных материалов проводят на специальных экспериментальных установках.
Сила трения между рыбой и различными поверхностями де формировала балку с тензодатчиками и через тензоусилитель записывается шлейфовым осциллографом на фотобумагу.
По осциллограмме процесса трения определяют силу трения покоя, т. е. минимальную силу, необходимую для сдвига рыбы с места. Чем больше продолжительность неподвижного контакта, тем больше сила трения. Коэффициент трения покоя определяют как частное от деления силы трения на силу нормального давления (силу тяжести при горизонтальной плоскости):
![]() (1)
(1)
Так как коэффициент трения покоя зависит от нормального давления, т. е. от силы тяжести рыбы, поэтому при проведении экспериментов подбирают рыб, незначительно различающихся по массе. Однако даже при одинаковой массе рыб коэффициенты трения покоя различаются. Для достоверности результатов определяют необходимое число экспериментов по формуле
![]() (2)
(2)
где t(p) — доверительный интервал; ε — доверительная оценка погрешности; σ — среднее квадратичное отклонение.
| Таблица 1 | |||
|
Коэффициент трения fi |
Среднее значение коэффициента трения fср |
Δf = fср- fi |
Δfi2 |
| 0.22 | – | +0.05 | 0.0025 |
| 0.23 | – | +0.04 | 0.0016 |
| 0.34 | – | –0.07 | 0.049 |
| 0.26 | 0.27 | +0.01 | 0.0001 |
| 0.31 | – | –0.05 | 0.0025 |
Необходимое число экспериментов можно определить следующим образом. Сначала провести пять-шесть экспериментов и рассчитать доверительный интервал, а затем уточнить необходимое количество измерений, исходя из того, что уменьшение доверительного интервала в λ раз обеспечивает увеличение количества измерений в λ 2 раз.
В табл. 1 приведены результаты опытов по определению коэффициен тов трения покоя атлантической сельди по нержавеющей стали при продолжительности неподвижного контакта, равной 10 с. Все эксперименты по определению коэффициентов трения покоя проводились в зависимости от продолжительности непод вижного контакта. Время неподвижного контакта принималось равным 0, 10, 20, 30, 40, 60, 120, 180, 240-и 300 с. Как было установлено, изменение силы трения практически происходит в интервале от 0 до 300 с. Коэффициенты трения покоя зависят от массы рыбы и температуры ее тела. При проведении экспериментов брали рыб массой, наиболее характерной для данного вида. Поскольку коэффициент трения покоя изменяется обратно пропорционально корню кубическому из массы рыбы, то при изменении массы рыбы в 1,5 раза коэффициент трения изменяется в 1,13 раза. Все эксперименты проводили при температуре 10—12° С.
Кинетические коэффициенты трения рыб.
Кинетические коэффициенты вычисляются как частное от деления силы трения на силу нормального давления. Силы трения определяются в зависимости от скорости скольжения на экспериментальных установках, описанных в разделе «Установки для исследования коэффициентов трения». Силы трения определяются по осциллограмме для того момента, когда фрикционный контакт полностью сформирован.
Анализируя осциллограмму процесса трения, можно еще раз убедиться в том, что сила трения зависит от площади фрикционного контакта. В начальный момент сила трения меньше, чем в конце; по мере формирования площади фрикционного кон такта она увеличивается. Площадь фрикционного контакта при движении формируется значительно быстрее, чем при покое. Ее формирование практически заканчивается за 5—6 с. В интервале исследованных скоростей будет иметь место полужидкостное трение.
В процессе взаимного перемещения между рыбой и соответствующим материалом устанавливаются фрикционные связи, которые непрерывно возникают и разрушаются. Количество установившихся связей зависит от относительной скорости скольжения, формы тела рыбы (т. е. площади фрикционного кон такта) и свойств исследуемого материала. Как правило, с увеличением скорости сила трения, а, следовательно, коэффициент трения уменьшаются. Это объясняется тем, что с увеличением скорости относительного перемещения уменьшается количество связей между рыбой и исследуемым материалом, а, следовательно, и коэффициентом трения. По-видимому, при скорости более 2 м/с имеет место жидкостный режим трения, при котором с увеличением скорости воз растает сила трения.
ЭКСПЕРИМЕНТАЛЬНЫЕ ДАННЫЕ О КОЭФФИЦИЕНТАХ ТРЕНИЯ РЫБ
Коэффициенты трения единичных экземпляров рыб.
Были проведены многочисленные исследования по определению коэффициентов трения единичных экземпляров некоторых видов рыб по материалам, наиболее часто используемым для изготовления рабочих органов рыбообрабатывающих машин.
Экспериментальные исследования по определению коэффициентов трения и кинематических коэффициентов трения про водили на установках, описанных в разделе «Установки для исследования коэффициентов трения».
Опыты проводили только с размороженной рыбой. Для достоверности результатов опыты по определению коэффициентов трения при одних и тех же продолжительности неподвижного контакта и скорости повторяли 15—20 раз, а затем определяли средние значения и средние квадратичные отклонения. По сред ним значениям строили графические зависимости коэффициен тов трения покоя от продолжительности неподвижного кон такта,
На рис. 5 представлены графические зависимости коэффициентов трения покоя сельди по нержавеющей стали, оргстеклу и прорезиненной лейте от продолжительности неподвижного контакта. Как видно из приведенных данных, наименьший коэффициент трения покоя получен при контакте сельди с оргстеклом, несколько больший — при контакте с прорезиненной лентой. Оргстекло имеет чистоту поверхности, соответствующую седьмому, а нержавеющая сталь — пятому классу шероховатости. При контакте рыбы с нержавеющей сталью и оргстеклом сила трения, по-видимому, в основном обусловливается адгезионной составляющей, поэтому коэффициенты трения сравнительно невелики.
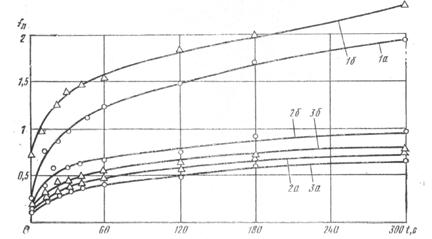
Рис. 5. Зависимость коэффициентов трения покоя сельди от продолжительности неподвижного контакта: 1 — сельдь — прорезиненная лента; 2 — сельдь — нержавеющая сталь; 3 — сельдь — оргстекло: а — при ориентации рыбы головой по направлению движения; б — то же, хвостом по направлению движения.
Прорезиненная лента является легко деформируемым материалом, при контакте с которым сила трения обусловливается деформационной и адгезионной составляющими, а поэтому и коэффициент трения для этого материалов значительно больше, чем для других. При ориентации сельди хвостом по направлению движения коэффициент трения будет несколько больше, чем при ее ориентации головой по направлению движения. Это объясняется строением чешуйчатого покрова. При ориентации рыбы хвостом по направлению движения увеличивается деформационная составляющая силы трения.
Коэффициенты трения рыб, замороженных в брикеты.
Для транспортировки рыбы, замороженной в брикеты, по наклонным плоскостям и посредством конвейеров необходимо знать углы наклона, при которых возможна такая транспортировка. Углы наклона можно определить, если известны коэффициен ты трения
tgφ = tgα = f (3)
где φ - угол трения; α - угол наклона плоскости; f - коэффициент трения.
Коэффициенты трения рыбы, замороженной в брикеты, определяли на тех же экспериментальных установках, что и коэффициенты трения покоя отдельных экземпляров рыб. Исследованные поверхности водой не смачивались. На рис. 6 и 7 представлены экспериментальные данные исследований коэффициентов трения рыб, замороженных в брикеты, по нержавеющей стали и прорезиненной ленте в зависимости от продолжительности неподвижного контакта. Анализ опытных данных позволяет предполагать, что между льдом и исследуемой поверхностью устанавливаются так называемые мостики сварки, которые и обусловливают величину силы трения.
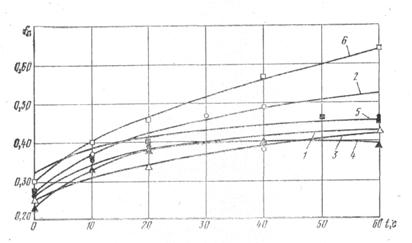
Рис. 6. Коэффициенты трения покоя различных видов рыб, замороженных в брикеты, в зависимости от продолжительности контакта с нержавеющей сталью:
1 — сельдь; 2 —треска; 3 —сайра; 4 — ставрида; 5 — скумбрия; 6 — сардинелла.
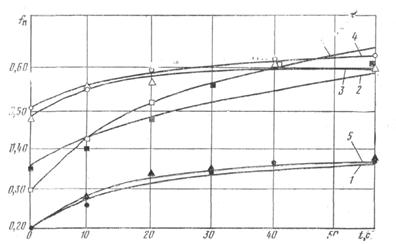
Рис.7. Коэффициенты трения покоя различных видов рыб, замороженных в брикеты, в зависимости от продолжительности неподвижного контакта с резиной:
1—сельдь; 2—треска; 3—сайра; 4—ставрида; 5—скумбрия; 6 — сардинелла.
Чем больше продолжительность неподвижного контакта, тем больше устанавливается мостиков сварки и, следовательно, тем больше сила трения. Поскольку для разных видов рыб, замороженных в блоки, коэффициенты трения различны, то, по-видимому, от дельные экземпляры рыб по-разному касаются исследуемой поверхности. Чем больше поверхность касания, тем больше сила трения. Сила трения между брикетом и исследуемой поверхностью будет зависеть от толщины слоя глазуровки. Данный фактор, на наш взгляд, является решающим. В связи с этим приведенные экспериментальные данные являются сугубо ориентировочными.
РЕОЛОГИЧЕСКИЕ СВОЙСТВА РЕАЛЬНЫХ ТЕЛ
Реологические свойства реальных тел могут характеризоваться упругостью, вязкостью и пластичностью. При описании реологических свойств тела рыбы будут использованы и другие термины, такие, как напряжение, деформация, релаксация и т. д..
Под упругостью обычно понимают свойство тела мгновенно изменять спою форму под действием приложенной силы, а после снятия напряжения восстанавливать первоначальную форму.
Вязкость — мера сопротивления, течению жидкости, равная отношению напряжения сдвига к скорости сдвига. Различают ньютоновские и неньютоновские жидкости. Ньютоновская жидкость характеризуется тем, что напряжение в ней пропорционально скорости деформации, т. е. коэффициент динамической вязкости является величиной постоянной. У неньютоновской жидкости при заданных температуре и давлении коэффициент динамической вязкости зависит от скорости деформации.
Пластические свойства тела характеризуются пределом текучести, т. е. уровнем напряжения, ниже которого пластическая деформация отсутствует или незначительна. Пластическое тело, так же как и вязкое, является диссипативной системой. В случае вязкого течения механическая энергия, которая диссипировалась при возникновении данной деформации, зависит от скорости деформации, тогда как в случае пластического течения диссипированная энергия не зависит от скорости деформации.
Деформация представляет собой смещение частиц материального тела, при котором не нарушается непрерывность самого тела. Способность де формироваться под действием внешних сил — основное свойство материалов всех реальных тел.
Под деформацией обычно понимают не только процесс относительного перемещения точек тела, протекающий во времени, по и мгновенное перемещение точек тела в любой фиксированный момент времени в течение: этого процесса.
Деформация может быть другой, т. е. исчезающей после снятия нагрузки, и остаточной, необратимой. Если деформация тела под действием конечных сил растет непрерывно и неограниченно, значит, материал течет. Пластическое течение возникает только тогда, когда силы превышают некоторый предел, называемый пределом текучести. Вязкое течение может происходить под действием любых сил. Скорость деформации в этом случае пропорциональна величине действующей силы и при исчезновении ее обращается в нуль. Следовательно, материал, которому присуще вязкое течение, является жидкостью, так как сколь угодно малому напряжению отвечает неограниченное возрастание деформации со временем; после снятия напряжения деформация не восстанавливается. Обратимость деформации есть проявление свойства упругости, и соответственно вся обратимая деформация является упругой. При снятии нагрузки упругая деформация полностью исчезает.
Под действием внешних сил происходит изменение формы и размеров тела, т. е. все реальные тела деформируются. Величина и характер деформации зависят от свойств материала, его формы и способа приложения внешних сил. Деформация тела сопровождается возникновением внутренних сил взаимодействия между частицами, т. с. напряжением. Под напряжением понимается мера интенсивности внутренних сил.
Различают мгновенную и запаздывающую упругую деформации. Поскольку в реальных телах, как деформация, так и напряжение распространяются с конечной скоростью, то мгновенная деформация является абстракцией. Если скорость распространения деформации весьма велика, то время процесса деформации с небольшой погрешностью можно принять равным нулю. Такую деформацию принято называть мгновенной.
Упругую деформацию, протекающую во времени, принято называть запаздывающей упругой деформацией.
Под ползучестью понимается возрастание деформации при постоянном напряжении, а соответствующая деформация называется деформацией ползучести.
Релаксация напряжений — это уменьшение напряжений в теле при постоянной деформации. При этом предполагается, что деформация создается с большой скоростью, в противном случае релаксация напряжений может частично пли полностью пройти за время создания деформации.
МЕХАНИЧЕСКИЕ МОДЕЛИ, ОПИСЫВАЮЩИЕ РЕОЛОГИЧЕСКИЕ СВОЙСТВА РЕАЛЬНОГО ТЕЛА
Процесс деформации реального тела весьма сложен, поэтому построить математическую модель такого тела трудно даже при наличии эмпирических коэффициентов. В действительности модель должна описывать такие свойства, как упругая деформация, пластическое и вязкое течение, ползучесть и релаксация и т. д. Если бы даже удалось создать такую модель, то она была бы слишком громоздкой для того, чтобы служить основой для решения задач, связанных с определением напряжений и деформаций в твердых телах. В связи с этим обычно пользуются более простыми моделями, описывающими лишь те механические свойства, которые наиболее существенны для рассматриваемой задачи.
Наиболее известными моделями такого типа являются упругое тело Гука и ньютоновская вязкая жидкость, представляющие собой математические абстракции, лишенные физической реальности и тем не менее являющиеся полезными средствами для изучения реальных физических свойств.
Упругое тело является консервативной системой, т. е. механическая энергия, используемая для совершения деформации, накапливается в теле и может быть получена обратно при раз грузке. Вязкое тело, т. е. такое тело, в котором напряжение зависит от скорости деформации, является диссипативной системой, поскольку механическая энергия, затраченная на преодоление внутреннего трения, препятствующего деформированию, обращается в теплоту.
При математическом описании конечных деформаций упругого тела возникают определенные трудности, обойти которые можно, ограничившись рассмотрением бесконечно малых деформаций.
Рассмотрение конечных деформаций для вязких жидкостей не приводит к особым математическим затруднениям. Различия в математическом описании конечных деформаций для упругих тел и вязких жидкостей состоят в том, что механическое поведение упругого тела определяется напряжениями и деформациями, а механическое поведение вязких жидкостей -напряжениями и скоростями деформаций. При определении де формаций мы сопоставляем деформированное состояние с не которым исходным состоянием, обычно с состоянием, свободным от напряжений. При конечном отклонении от этого со стояния математические формулы, определяющие деформации, становятся весьма сложными. Кроме того, при определении скоростей деформаций сопоставляют состояния рыбы в момент времени, разница между которыми равна dt. Отклонения между этими состояниями бесконечно малы, поэтому не возникает математических усложнений.
В упругих телах напряжение связано с мгновенным состоянием деформации, а в вязкой жидкости и пластических телах — с мгновенным состоянием течения; вязкое и пластическое течения связаны с диссипацией энергии и приводят к остаточным деформациям. В случае вязкого течения механическая энергия, которая диссипировалась при возникновении данной деформации, зависит от скорости деформации; в случае пластического течения диссипированная энергия не зависит от скорости деформации.
Математическую зависимость между напряжением деформаций и временем в виде линейного дифференциального уравнения с постоянными коэффициентами можно установить и без моделей, однако модели в значительной степени облегчают уяснение физической сущности механического поведения того или иного тела, а также дают возможность определить, обладает ли тело мгновенной упругой деформацией, запаздывающей упругой деформацией, релаксацией напряжений. Поскольку зависимости между напряжением, деформацией и временем определяются обычно линейными дифференциальными уравнениями с постоянными коэффициентами, то в общем виде уравнение может быть записано следующим образом:
![]() (4)
(4)
где А, А1, An, В, b1, Вт — постоянные коэффициенты, которые определяют механические свойства изучаемого тела; σ — напряжение; ε — относительная деформация.
Решение дифференциального уравнения содержит, произвольные постоянные, число которых равно порядку дифференциального уравнения. Произвольные постоянные определяют, исходя из начальных условий, т. е. при t = 0 или при t=∞. Число условий должно равняться числу произвольных постоянных. Поскольку механическое поведение реального тела описывается уравнением (4) только приближенно, то задача заключается в том, чтобы выбрать частный вид уравнения, достаточно хорошо описывающий экспериментальную зависимость -напряжение — деформация — время.
Для математического описания деформаций и напряжений исследуемого тела можно сначала в соответствии с экспериментальными данными подобрать подходящую модель, состоящую из упругих, вязких и пластических элементов или их комбинаций, а затем описать ее математически. Или же сразу подо брать тип уравнения, начиная с простейших видов, которое качественно описывает экспериментальную зависимость. Качественное совпадение находят по наличию или отсутствию мгновенной упругой деформации, запаздывающей деформации, остаточной деформации и релаксации напряжений.
Постоянные коэффициенты находят, исходя из экспериментальных данных, и определяют количественное расхождение между выбранным уравнением и опытными данными.
СТРУКТУРНО МЕХАНИЧЕСКИЕ СВОЙСТВА РЫБЫ
Структурно-механические свойства рыбы проявляются под влиянием нормальных или касательных напряжений. Этими свойствами определяется поведение тела рыбы в напряженном состоянии. Под действием приложенной силы тело рыбы де формируется.
Зависимость между деформацией тела рыбы и напряжением в нем характеризует механическое поведение тела рыбы. Величина деформации тела рыбы под действием приложенной силы обусловливается прежде всего его структурно-механическими свойствами.
Мышечная ткань рыбы по структурно-механическим свойствам занимает промежуточное положение между жидкими и твердыми телами и представляет собой, по-видимому, дисперсную систему со сплошной структурой. Рассматривая мышечную ткань рыбы как сплошную структуру, не следует считать ее однородной.
Мышечное волокно как основа мышечной ткани рыбы само по себе неоднородно и состоит из упругих, пластических и вязких элементов.
Имеется несколько методов оценки структурно-механических свойств дисперсных систем. По методу академика П. А. Ребиндера прочность структуры оценивается степенью проникновения металлического наконечника в глубь дисперсной системы под, действием постоянной силы.
Существует метод, основанный на использовании универсального консистометра, при помощи которого определяют эластичность, твердость и вязкость исследуемого объекта. И. А. Воскресенским были предложены три показателя для характеристики структурно-механических свойств мышечной ткани рыбы: эластичность, эластическая и пластическая прочность. Под эластичностью понимается способность мышечной ткани рыбы восстанавливать свои первоначальные геометрические размеры после снятия деформирующей силы. Эластическая прочность характеризуется способностью мышечной ткани рыбы противодействовать движению тупого тела, сжимающего ткань под действием деформирующей силы.
Пластическая прочность характеризует способность мышечной ткани противодействовать движению острого тела, сжимающего и разрезающего ткань под действием деформирующей силы.
Все предложенные показатели определяются экспериментально и практически не могут быть выражены количественно. Название каждого показателя также не отражает существа вопроса. Эластическая прочность — это упругая прочность, а рыба не является упругим телом, поэтому такой показатель не может характеризовать структурно-механические свойства рыбы. Пластическая прочность не может характеризовать мышечную ткань рыбы, поскольку она не является пластическим телом. Причем последние два показателя не имеют размерностей, характеризующих прочностные показатели. Для изучения структурно-механических свойств тела рыбы необходимо установить прежде всего его реологические характеристики, а затем критерии оценки этих свойств. Зная, какими свойствами обладает тело, можно подобрать соответствующую модель и описать их аналитически.
ОПРЕДЕЛЕНИЕ СВОЙСТВ ТЕЛА ПО РЕОЛОГИЧЕСКИМ ХАРАКТЕРИСТИКАМ
Для выбора модели, описывающей механическое поведение того или иного реального тела, необходимо знать, какими реологическими свойствами оно обладает.
Реологические свойства тела определяют обычно с помощью приборов, исходя из характеристик упругости, вязкости и пластичности. Однако наиболее простой метод определения реологических характеристик реального тела заключается в построении кривых кинетики деформаций и кривых релаксации напряжений. По этим кривым можно найти модуль мгновенной и запаздывающей упругости, коэффициент динамической вязкости, предел текучести, упругости и прочности, т. е. все данные, характеризующие упругие, вязкие и пластические свойства тел.
Перечисленные константы позволяют объединить деформационное поведение материала и достаточно полно характеризовать его структурно-механические свойства. Под кривыми кинетики деформаций понимается изменение деформации тела с течением времени при постоянном напряжении, а под кривы ми релаксации напряжения – изменение напряжения в теле с течением времени при постоянной деформации.
При снятии кривых кинетики де формаций необходимо правильно вы брать величину напряжения, поскольку при большом напряжении в вяз ком теле возникает большая скорость деформации, которую можно ошибочно принять за мгновенную упругую деформацию.
Кинетика деформации тела рыбы.
 Экспериментальные исследования для построения кривых кинетики деформаций и диаграммы развития восстановительных
деформаций в теле рыбы после снятия
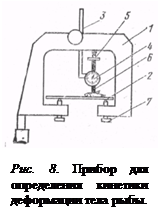
напряжения были проведены на приборе,
показанном на рис. 8. К головке 1
посредством ползуна 3 присоединяют платформу 5, на которой
устанавливают груз, а к нижнему его концу
крепят наконечник 6. На винты 7, соединенные с головкой 1, устанавливают
плоскость 2.
Экспериментальные исследования для построения кривых кинетики деформаций и диаграммы развития восстановительных
деформаций в теле рыбы после снятия
напряжения были проведены на приборе,
показанном на рис. 8. К головке 1
посредством ползуна 3 присоединяют платформу 5, на которой
устанавливают груз, а к нижнему его концу
крепят наконечник 6. На винты 7, соединенные с головкой 1, устанавливают
плоскость 2.
Опыты по определению изменений деформаций в теле рыбы при постоянном напряжении проводили в следующей последовательности. Рыбу укладывали на плоскость 2. Ползун 3 с индикатором перемещали таким образом, чтобы шток индикатора касался тела рыбы, а стрелка индикатора совмещалась с нулевой отметкой 4. На платформу 5 укладывали груз и шток погружали в тело рыбы. Время погружения штока на соответствующую глубину фиксировалось секундомером через 0, 5, 10, 20, 30, 40, 60/120 и 180 с.
Наконечник 6 имел плоскую цилиндрическую поверхность. Груз, укладываемый на платформу 5, выбирали таким образом, чтобы напряжение между наконечником и рыбой было 65•102 Н/м2.
Поскольку внутри индикатора имеется пружина, препятствующая перемещению штока, была снята характеристика пружины, и усилие, необходимое для сжатия пружины, было учтено при определении напряжения между наконечником и штоком. Колебание напряжения не превышало 6%.
По истечении 180 с груз снимали и фиксировали восстановительную деформацию в теле рыбы. В связи с тем что визуально зафиксировать величину восстановительной деформации трудно, применяли следующий метод. Рыбу укладывали на платформу весов и уравновешивали гирями. Затем платформу фиксировали от перемещения и рыбу нагружали через индикатор постоянной силой по методике, описанной выше. После снятия нагружения платформа весов освобождается от фиксации и весы оказываются уравновешенными, т. е. качания весов не происходит. Теперь представляется возможным фиксировать восстановительную деформацию, поскольку касание рыбы к наконечнику индикатора фиксируется чувствительными весами.
Восстановительную деформацию определяли через те же промежутки времени, что и при нагружении.
ОПРЕДЕЛЕНИЕ МОДУЛЯ УПРУГОСТИ И КОЭФФИЦИЕНТА ДИНАМИЧЕСКОЙ ВЯЗКОСТИ ТЕЛА РЫБ
Для того чтобы воспользоваться всеми теоретически выведенными уравнениями, необходимо знать величину мгновенного модуля упругости Е0, запаздывающего модуля упругости E1 и коэффициента динамической вязкости η. Величину мгновенного модуля упругости E0 можно определить исходя из экспериментальных данных. На рис. 9 представлены кривые кинетики деформации тела скумбрии, когда напряжение между наконечником и телом рыбы равно σ =0,13•105 Н/м2.
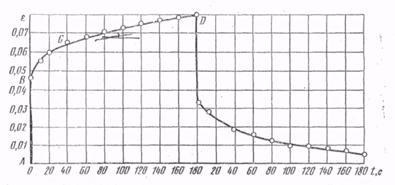
Рис. 9. График кинетики деформации тела скумбрии.
Мгновенный модуль упругости определяется следующим об разом. По графику определяют величину мгновенной деформации. Мгновенный модуль упругости скумбрии, график кинетики деформаций которой изображен на рис. 9, равен:
 Н/м2 (5)
Н/м2 (5)
Мгновенный модуль упругости для скумбрии, ставриды, сардинеллы, сельди, берикса колебался в пределах от 1,5•105 до 6•105 Н/м2.
Численное значение коэффициента динамической вязкости определяли, основываясь на следующем. Из рис. 9 видно, что вначале деформация тела рыбы происходит только за счет мгновенного модуля упругости Е0 (участок AB), а затем за счет совместного действия запаздывающего модуля упругости и вязкости (участок ВС). Постепенно криволинейная зависимость практически переходит в прямолинейную (участок CD). Если полагать, что на участке CD деформация происходит только за счет вязкости, то можно из графика определить коэффициент динамической вязкости:
 (6)
(6)
Определив на участке CD тангенс угла наклона, можно найти коэффициент динамической вязкости.
ЖЕСТКОСТЬ РЫБЫ
Надежность работы рыбообрабатывающих машин в значительной степени зависит от структурно-механических свойств рыбы. Тело рыбы после засыпания проходит три стадии изменении: до посмертного окоченения, посмертное окоченение и автолиз. Каждой стадии посмертных изменений соответствуют свои показатели структурно-механических свойств мышечной ткани рыбы. Эти изменения характерны как для свежей рыбы, так и для замороженной, а затем размороженной. С изменением структурно-механических свойств рыбы изменяются силы взаимодействия между рыбой и рабочими органами машин, поскольку изменяется площадь контакта, обусловливающая силы трения.
До настоящего времени структурно-механические характеристики в основном оцениваются органолептическим методом. Рыбу сдавливают пальцами и оценивают ее консистенцию. Не достатком такого метода оценки структурно-механических характеристик мышечной ткани является его субъективность. К. тому же нет количественных показателей, оценивающих консистенцию тела рыбы.
Был предложен критерий оценки структурно-механических свойств тела рыбы, названный жесткостью. При органолептическом исследовании консистенции мышечной ткани человек сжимает тело рыбы, совершая работу, по величине которой и судят о консистенции тела рыбы. Для получения количественного критерия совершаемой работы необходимо, чтобы сжатие рыбы совершала машина и при этом весь процесс сжатия рыбы можно было записать на ленту. Исследование жесткости тела рыбы проводилось на тех же приборах и с теми же приспособлениями, что и в случае определения допустимого удельного давления.
Тензометрическая головка автоматического пресса IS-5000 позволяла фиксировать усилия от 0,01 до 50000 Н. Скорость перемещения траверсы пресса принималась равной 10 мм/мин, а скорость перемещения ленты — 20 мм/мин. Как было указа но выше, рыба является упруговязким телом. Известно, что при большой скорости деформации упруговязкие тела ведут себя как упругие. Для проявления как упругих, так и вязких свойств рыбы была выбрана скорость деформации тела рыбы, равная. 10 мм/мин.
Исследования по определению жесткости тела рыбы проводили в следующей методической последовательности. Рыбу укладывали в приспособление для сжатия с заранее выбран ной площадью пластин. Выбирая площадь пластин, исходили из формы тела рыбы, при этом необходимо было обеспечить максимальный первоначальный контакт между пластинами и мышечной тканью тела рыбы. Чаще всего применяли пластины размерами 20х30 мм, 20х50 мм и 30х80 мм.
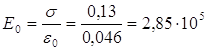
Запись самописца автоматического пресса в координатах усилие — деформация для трех различных видов рыб представ лена на рис. 10. По оси ординат указано усилие, действующее на тело рыбы, в ньютонах, а по: оси абсцисс – деформация тела рыбы в миллиметрах. На участке БВ кривой сжатия рыбы, по-видимому, не обеспечивается полный контакт между пластинами и телом рыбы, поэтому целесообразно работу, затраченную на сжатие тела рыбы, определять, начиная с точки В. Работу сжатия для всех исследованных видов рыб определяли при 5-миллим-етровой деформации (участок BE). За штрихованная на рис. 10 площадь и представляет собой работу, затраченную на сжатие рыбы.
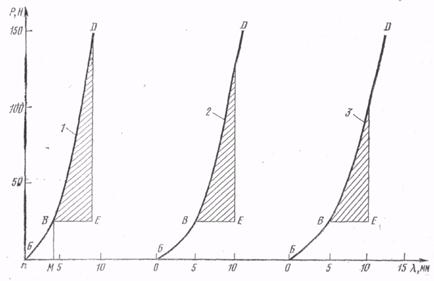
Рис. 10. Запись самописца при сжатии тела рыбы:
1 — ставрида; 2 — скумбрия; 3 — сардинелла.
Если определять работу сжатия для различных рыб при разной деформации, то вели чины работы будут не соизмеримы.
Под жесткостью тела рыбы понимается отношение работы по сжатию тела рыбы при 5-миллиметровой деформации к площади сжимающих пластин:
 (7)
(7)
где С — жесткость тела рыбы, Н/м; А — работа по сжатию тела рыбы, Н•м; F — площадь сжимающих пластин, м2.
Этот критерий оценки структурно-механических свойств рыбы назван жесткостью в связи с тем, что его размерность сов падает с размерностью жесткости, общепринятой в технике.
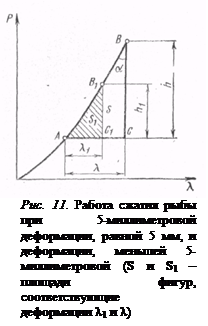 Из рис. 10 видно, что чем меньше
сопротивляемость сжатию
тела рыбы, тем меньше угол наклона кривой к оси абсцисс, а следовательно, меньше и
работа сжатия. Так как из трех видов рыб (ставриды, скумбрии, сардинеллы) наибольшая работа затрачивается на деформацию тела ставриды,
то, следовательно, и жесткость тела ставриды
будет наибольшей. Для некоторых видов рыб,
например кильки, определить экспериментально
работу сжатия при 5-миллиметровой деформации практически невозможно, потому
что вся толщина тела рыбы не превышает 5 мм. В этом случае для получения соизмеримых значений жесткости
можно пересчитать работу при 5-милиметровой, на работу при 5-миллиметровой
деформации. На рис. 11 показана работа при деформации λ1 и
λ.
Из рис. 10 видно, что чем меньше
сопротивляемость сжатию
тела рыбы, тем меньше угол наклона кривой к оси абсцисс, а следовательно, меньше и
работа сжатия. Так как из трех видов рыб (ставриды, скумбрии, сардинеллы) наибольшая работа затрачивается на деформацию тела ставриды,
то, следовательно, и жесткость тела ставриды
будет наибольшей. Для некоторых видов рыб,
например кильки, определить экспериментально
работу сжатия при 5-миллиметровой деформации практически невозможно, потому
что вся толщина тела рыбы не превышает 5 мм. В этом случае для получения соизмеримых значений жесткости
можно пересчитать работу при 5-милиметровой, на работу при 5-миллиметровой
деформации. На рис. 11 показана работа при деформации λ1 и
λ.
Если предположить, что площадь фигуры ABC можно заменить треугольником, то:
 (8)
(8)
Треугольники ABC и AB1C1 подобны и, следовательно:
 (9)
(9)
![]()
![]() (10)
(10)
тогда

 (11)
(11)
Поскольку работа сжатия рыбы описывается площадью фигур S1 и S, то
 (12)
(12)
где A –работа сжатия рыбы при 5-миллиметровой деформации; λ – 5-миллиметровая деформация; А1 – работа при деформации, меньшей 5-миллиметровой; λ1 –деформация, при которой определяется работа A1
Таким образом, представляется возможным сделать пересчет работы сжатия при любой деформации тела рыбы, меньшей 5-миллиметровой, на 5-миллиметровую деформацию.
| Таблица 2 | |||
| Рыба |
Жесткость тела рыбы, Н/м2 |
Среднее квадратичн. отклонение, Н/м2 |
Коэффициент вариации, % |
|
Килька Мойва Салака Сардина Сардинелла Скумбрия Ставрида |
224 172 52 79 72 78 96 |
35 39,8 8,3 12,8 12 10 19 |
16 23 16 16,3 16 13 20 |
Эксперименты по определению жесткости тела рыбы проводили на рядовой рыбе, выловленной и замороженной на промысле, а затем размороженной перед проведением опытов. Температура тела рыбы была 8—15°С. В табл. 2 приведены данные о средней величине жесткости некоторых видов рыб (для каждого вида рыб было проведено 20—30 экспериментов).
Зная средние значения жесткости тела рыбы и среднее квадратичное отклонение, можно определить зону доверительных интервалов:
C = Cср ± t(P)σ (13)
Из приведенных данных о жесткости тела различных видов рыб, для которых работу определяли при 5-миллиметровой деформации без пересчета, наибольшей жесткостью обладает тело ставриды. Большая жесткость тела кильки и мойвы, обусловлена деформированием не только мышечной ткани, но и хребтовой кости, а следовательно, возрастанием сопротивления сжатии) и работы сжатия.
Предложенный критерий жесткости является объективным показателем структурно-механических свойств рыбы. Известно, что невозможно создать рыборазделочную машину, которая работала бы на сырье любого качества. В настоящее время всякое отклонение от нормы в работе рыбообрабатывающего оборудования объясняется, как правило, несовершенством конструкции машины. Контроль качества поступающего на обработку сырья не ведется и не может вестись, поскольку нет количественного критерия для оценки структурно-механических свойств рыбы. Для установления такого контроля за сырьем необходимо разработать экспресс-приборы, при помощи которых можно осуществлять такой контроль, и установить их непосредственно в цехах и на судах.
Установление границ пригодности сырья для переработки посредством критерия жесткости повысит ответственность добытчиков рыбы за своевременную ее переработку. Сортность рыбы также можно установить с помощью критерия жесткости.
По-видимому, конструкторы рыбообрабатывающего оборудования также смогут гарантировать надежную его работу на сырье, качество которого находится в определенных пределах, установленных при помощи критерия жесткости.
После замораживания, хранения и размораживания жесткость и модуль упругости рыбы уменьшались примерно на 10%. Если полагать, что рыбы подобны не только биологически, но и по структурно-механическим свойствам, то на основании экспериментальных данных, полученных при исследовании леща и судака, можно утверждать, что в результате замораживания и последующего размораживания жесткость рыбы и модуль упругости уменьшаются на 10%.
ИССЛЕДОВАНИЕ УСИЛИЙ ОТРЫВА ВНУТРЕННОСТЕЙ РЫБ
В процессе разделки рыбы с помощью машин, как правило, отрезается голова и удаляются внутренности. Удаление внутренностей происходит механически или гидровымывом. При проектировании рабочих органов машин для удаления внутренностей необходимо располагать данными об усилиях их отрыва, деформации и месте обрыва.
Исследования по определению усилий отрыва внутренностей и их деформации проводили на автоматическом прессе IS-5000 японской фирмы «Шимардзу». Для захвата рыбы за голову и туловище было спроектировано приспособление, показанное на рис. 12. Захват для головы (рис. 12, а) состоит из двух планок 1, 2, соединенных между собой шарниром 3. К планкам приварены щеки 4 и 5, имеющие криволинейные поверхности с насечками. Зажим головы рыбы осуществляется посредством сближения щек за счет винта 6 и гайки 7. Захват для туловища (рис. 12, б) состоит из двух планок 8, 9, облицованных резиной 10. Планки соединяются шарнирно 11 и сближаются посредством винта 12. В планках 8, 9 имеются отверстия, через которые пропускается игла, прокалывающая рыбу для более надежной ее фиксации. Хвостовые захваты имеют цилиндрическую форму. Хвостовые захваты для туловища рыбы крепятся к траверсе, хвостовые захваты для головы — к штанге, присоединенной к тензометрической головке.
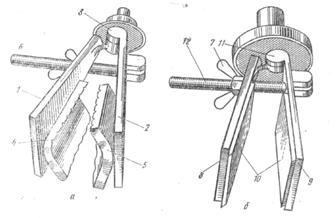
Рис. 12. Приспособление для исследования усилий отрыва внутренностей
рыб: а — захват для головы; б — захват для туловища.
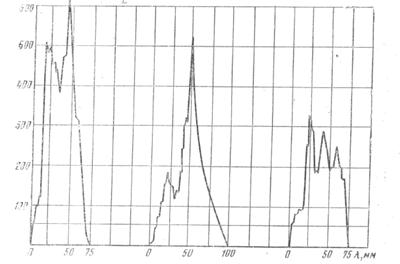
Рас. 13. Запись самописца при отрыве внутренностей ставриды в координатах усилие — деформация.
Экспериментальные исследования по определению усилий отрыва внутренностей рыбы и их деформации проводили в следующей последовательности. Мороженую рыбу размораживали до температуры 10—15° С, взвешивали и замеряли ее максимальные линейные параметры. Ножом отрезали голову от тушки таким образом, чтобы внутренности, присоединенные к голове, не повреждались. Рыбу фиксировали посредством захватов за голову и туловище. Включали пресс. Усилия отрыва внутренностей и их деформация записывались самописцем на ленту. На рис. 13 представлены записи самописца при отрыве внутренностей ставриды в координатах усилие — деформация. Аналогичные записи получены для других видов рыб. Анализируя записи самописца, можно прийти к заключению, что отрыв внутренностей происходит постепенно. Сначала отмечаются их удлинение и вытягивание, а затем отрыв, происходящий почти всегда в районе анального отверстия.
Не замечено корреляционной связи между усилием отрыва внутренностей и их деформацией, а также, между усилием отрыва и массой или длиной рыбы.
ЛИНЕЙНЫЕ И ВЕСОВЫЕ ХАРАКТЕРИСТИКИ РЫБ
ОПРЕДЕЛЕНИЕ МОРФОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК РЫБ
При проектировании рыбообрабатывающего оборудования необходимо располагать данными о морфометрических характеристиках тела рыбы. Существует несколько различных схем замера линейных размеров рыб и способов обработки полученных опытных данных. Принципиальным, на наш взгляд, является вопрос о выборе основного размера рыбы. Размер рыбы от рыла до конца хвостового плавника не может быть принят за основной размер, поскольку нет строгой пропорциональности между длиной рыбы и длиной хвоста, затруднительно выполнять обмерные работы с учетом длины хвостового плавника; хвостовой плавник, не представляющий пищевой ценности, как правило, удаляется. Не представляется возможным установить зависимость между длиной рыбы с учетом хвостового плавника и ее массой.
За основной — базовый – размер рыбы следует принимать размер от конца рыла до конца чешуйчатого покрова. Этот размер также принят как базовый в методике замера линейных размеров, разработанной лабораторией механизации Гипрорыбфлота.
По-видимому, даже при одинаковой базовой длине рыб (в дальнейшем этот размер будем называть промысловой длиной рыбы) размеры отдельных аналогичных элементов тела рыбы будут несколько различаться. Разбивка всего улова на размерные фракции и приведение для каждой размерной фракции максимального, минимального и среднего размеров не являются правомерными, поскольку они характеризуют только данный улов и не. являются достоверными.
Задача каждого исследования заключается прежде всего в том, чтобы найти обобщающие зависимости и перейти от частных случаев к общему. Выбор обобщающих зависимостей основывался на внутривидовом подобии рыб, т. е. на том, что при изменении промысловой длины рыбы пропорционально изменяются все остальные ее размеры, а следовательно, соотношение между каждым размером и промысловой длиной для различных рыб одного вида будет оставаться практически величиной постоянной.


 (14)
(14)
где
![]() — безразмерные коэффициенты;
li, Нi;, Bi — соответствующие размеры по
длине, высоте, и толщине.
— безразмерные коэффициенты;
li, Нi;, Bi — соответствующие размеры по
длине, высоте, и толщине.
Поскольку размеры отдельных элементов тела рыбы являются случайными величинами, то для достоверности результатов необходимо установить закон распределения случайных ошибок и зону доверительных интервалов. По результатам экспериментов на основании критерия Пирсона χ2 было установлено, что случайные ошибки безразмерных коэффициентов подчиняются нормальному закону распределения.
Весьма важным является выбор количества экспериментов, которое определялось по замеру характеристик рыб в соответствии с законами математической статистики:
 (15)
(15)
где n – число замеров; t(P) – доверительный интервал; ε – доверительная оценка точности; σ – среднее квадратичное отклонение.
Разделив и умножив правую часть уравнения на среднее значение коэффициента ![]() выражающего отношение длины
li к промысловой длине L, получим:
выражающего отношение длины
li к промысловой длине L, получим:
 (16)
(16)
где
![]() – коэффициент вариации.
– коэффициент вариации.
При надежности P = 0,95 и t(P)=2
отношение ε/![]() = 0,05. Принимая максимальную величину коэффициента
вариации m = 0.15,
определяем необходимое количество замеров, которое равно 36.
= 0,05. Принимая максимальную величину коэффициента
вариации m = 0.15,
определяем необходимое количество замеров, которое равно 36.
Значения коэффициентов ![]() для разных экземпляров рыб несколько различаются, поэтому
важно знать не только среднее значение соответствующего коэффициента, но и зону доверительных интервалов, т. е. как
разбросаны значения
для разных экземпляров рыб несколько различаются, поэтому
важно знать не только среднее значение соответствующего коэффициента, но и зону доверительных интервалов, т. е. как
разбросаны значения ![]() вокруг среднего
вокруг среднего ![]() . Зная, что случайные ошибки подчиняются нормальному закону
распределения, можно определить зону доверительных интервалов соответствующего размера по следующим зависимостям:
. Зная, что случайные ошибки подчиняются нормальному закону
распределения, можно определить зону доверительных интервалов соответствующего размера по следующим зависимостям:
 (17)
(17)
Литература:
1) Попов В. В. Исследования физико-механических свойств эпипелагических видов рыб. Калининград 1983
2) Попов В. В. Исследование морфометрических и теплофизических характеристик мелких видов рыб. Калининград 1984
3) Попов В. В. Определение физико-механических характеристик рыб открытого океана. Калининград 1985.
4) Уманцев А. З. Физико-механические характеристики рыб: методика и результаты исследования. М. 1980
5) Чепрасов Н. Н. Использование физико-механических свойств рыбы при эксплуатации оборудования: учебное пособие. Калининград 1980